Manejo de Memoria en CUDA
(I)
Martín Belzunce
Computación Paralela con Procesadores Gráficos
Departamento de Electrónica
Facultad Regional Buenos Aires – Universidad Tecnológica Nacional
Manejo de Memoria en CUDA
1
Temario
• Tipos de Memoria
• Memoria Global
– Acceso Unificado (Coalesced)
– Copias Asincrónicas Host-Device
• Memoria Compartida
– Bancos de Memoria
• Texturas
Manejo de Memoria en CUDA
2
Reglas Generales para Optimizar
Código en CUDA
• Optimizar Transferencias de Memoria
• Maximizar Ocupación del Procesador
• Maximizar la Intensidad Aritmética
Manejo de Memoria en CUDA
3
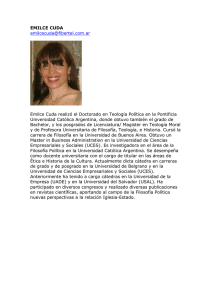
Tipos de Memoria en CUDA
Memoria Local
Privada a cada Thread
Memoria Compartida
Común a todos los
Thread de un mismo
Bloque
Memoria Global
Visible por todos los
Threads en ejecución
Memoria de Textura
Accesible desde el
Host
Manejo de Memoria en CUDA
4
Tipos de Memoria en las GPUs NVIDIA
(Hardware)
Memorias Disponibles en Todas las GPUs NVIDIA compatibles con CUDA
Manejo de Memoria en CUDA
5
Tipos de Memoria en las GPUs NVIDIA
(Hardware)
Propiedades de las memorias en las arquitecturas G80 y Tesla T10
(Compute Capabilities 1.x)
Manejo de Memoria en CUDA
6
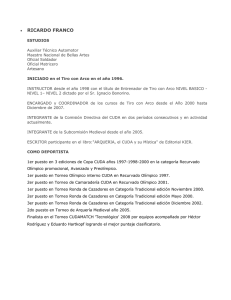
Recordemos Arquitectura Tesla T10
•GPU escalable en cantidad de Streaming Multiprocessors (SMs)
•Cada SM contiene:
• 8 Procesadores Escalares o Thread Processors.
• 1 unidad de punto flotante de doble precisión
• 2 unidades de ejecución de funciones especiales (SFUs)
Manejo de Memoria en CUDA
7
Ámbito de Ejecución de los Threads
Manejo de Memoria en CUDA
8
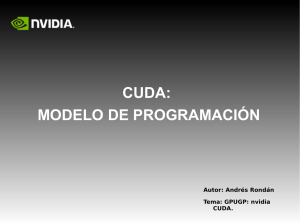
Ejecución de Threads
• Los bloques se ejecutan en grupos
de 32 Threads denominados Warps.
• Los Threads del Warp se distribuyen
en los procesadores disponibles
dentro del SM.
• Acceso a Memoria Global de los Threads
en Ejecución de medio Warp
• Todos los kernels requieren traer datos de
la memoria global
• Permite obtener buen ancho de banda
(más de 100 Gbytes/sec)
• La latencia es muy alta
Manejo de Memoria en CUDA
9
Memoria en Arquitectura Fermi
• Se introdujeron memorias cache de L1 y L2.
• La cache de L1 se comparte con la memoria compartida
(configurable).
• Ahora la memoria global tiene cache (L2).
Manejo de Memoria en CUDA
10
Optimización de Memoria Global
• El acceso a los datos se inicia desde la
memoria global. (Incluso cuando luego uso
memoria compartida)
• En la GPU se tienen cientos de cores -> se
debe conseguir gran ancho de banda para
brindarle constantemente datos.
• La mayoría de las aplicaciones están limitadas
en ancho de banda -> es fundamental
optimizar los accesos a memoria global.
(puede enmascara otras optimizaciones)
Manejo de Memoria en CUDA
11
Optimización de Memoria Global (II)
• El acceso a memoria global tiene una latencia
de 400-800 ciclos de clock.
• Los threads de un warp quedan frenados
cuando requieren un dato de memoria global.
• El scheduler ejecuta otro warp durante esta
espera.
• - > Debo tener muchos warps en ejecución por
SM (Alta Ocupación).
• Lo deseable es trabajar con el PCI Express
saturado (No siempre posible).
Manejo de Memoria en CUDA
12
Optimización de Memoria Global (III)
•
•
•
•
•
•
•
Buena ocupación: +512 threads por SM.
Configurar tamaño de bloque para lograrlo.
Solo hasta 8 bloques por SM.
Bloques chicos - > baja ocupación.
Bloques grandes -> poco flexible.
El tamaño debe ser múltiplo de 32.
Valor de referencia: 128-256 threads. (Hay que
evaluar cada aplicación)
Manejo de Memoria en CUDA
13
Accesos a Memoria Global (HW)
• El ancho del bus depende de la GPU (varios
bytes)
• Se pueden traer múltiples datos en una única
lectura.
• Ancho de banda depende además del clock de la
memoria.
• Ejemplo:
clock
ddr
bus
a Bytes
BW = 1848.106 [1/seg] * 2 * 384 [bits] / 8 [Bytes/bits] = 177,4 GB/seg
Manejo de Memoria en CUDA
14
Accesos a Memoria Global (HW/SW)
• ¿Cómo aprovecho todo el ancho de bus? ->
Acceso Unificado (coalesced)
• Los Threads de un mismo warp acceden a
memoria global en la misma lectura (bajo ciertas
condiciones)
En Tesla de a medio Warp
Los Threads deben acceder
a posiciones contiguas de
memoria
El warp podía estar incompleto
Manejo de Memoria en CUDA
15
Accesos a Memoria Global (HW/SW)
• Los accesos a memoria de
medio warp se unifican en una
o más transacciones
dependiendo la alineación y el
tamaño de los datos.
• Para compute capabilities 1.0 y
1.1, sólo coalesced si:
– Si palabra es de 4 bytes, deben
acceder al mismo segmento de 64
bytes.
– Si es de 8 bytes, deben acceder al
mismo segmento de 128 bytes.
– Threads alineados a memoria.
Manejo de Memoria en CUDA
16
Accesos a Memoria Global (HW/SW)
• En compute capabilities 1.2 y 1.3 pueden estar en cualquier orden dentro del
segmento.
• El tamaño del segmento cambia según el tamaño de la palabra (1 byte -> segmento
32 bytes)
(2 bytes -> segmento 64 bytes)
(4, 8 y 16 bytes -> 128 bytes)
• En Fermi (compute capabilities 2.x) se trabaja a nivel de warp completo para datos
menores o iguales a 4 bytes (segmento de 128 bytes).
• En Fermi se incorporan caches de L1 y L2.
• En L1 la línea de cache es de 128 bytes, en L2 de 32 bytes.
• En Kepler solo la L2 cachea memoria global. L1 para memoria local.
Manejo de Memoria en CUDA
17
Probando el Acceso Coalesced
• Implementar un kernel que lea un dato de
memoria global, lo incremente y lo escriba en la
misma posición.
– El tamaño del vector que sea de al menos 10 millones.
– Promediar los tiempos de ejecución para 10K corridas.
– Evaluar distintos tamaños de datos (unsigned char, int,
float, double)
• Realizar acceso alineado y no alineado.
• Repetir lo mismo para una matriz almacenada en
un array, accediéndola en orden fila-columna y
viceversa.
Manejo de Memoria en CUDA
18
Como Evitar Accesos No Coalesced
• Si el patrón de acceso a memoria es muy
irregular, intentar usar texturas (si es posible).
• Si todos los threads acceden a la misma
posición de memoria, usar memoria
constante.
• Para estructura de datos usar estructuras con
arrays en vez de arrays de estructuras.
• O forzar la alineación de la estructura a 4, 8 o
16 bytes.
• O usar el tipo de dato float4.
Manejo de Memoria en CUDA
19
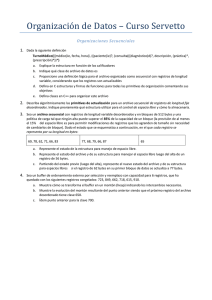
Ejemplo de Estructura de Arrays
Array de Estructuras
struct Point{
float x;
float y;
float z;}
Estructuras de Arrays
float3 puntos[NUM_THREADS];
=
struct Point puntos[NUM_THREADS];
0
12
0
32
24
struct Point{
float x[NUM_THREADS];
float y[NUM_THREADS];
float z[NUM_THREADS];}
struct Point puntos;
36
Manejo de Memoria en CUDA
20
Utilización de Float3
Kernel que usa float3
__global__ void simulaParticulas (float3* pos)
{
int index = blockIdx.x *blockDim.x+threadIdx.x;
float3 localPos = pos[index];
//procesamiento
}
Solución 1: Separar en tres variables distintas
__global__ void simulaParticulas (float* posx,
float* posy, float*posz)
{
int index = blockIdx.x *blockDim.x+threadIdx.x;
float3 localPosx = posx[index];
float3 localPosy = posy[index];
float3 localPosxz= posz[index];
• Memoria alineada en 12 bytes
(distinto a 4, 8 o 16)
• Debo hacer 3 lecturas. 1/3 BW
Solución 2: Usar float3 pero cargar a través
de floats
Manejo de Memoria en CUDA
21
Más Sobre Caches L1 y L2
• La cache L1 comparte la memoria física con la Memoria
Compartida. Configurable 16KB L1 / 48KB smem o
48KB L1 / 16 KB L1.
– cudaFuncSetCacheConfig(MyKernel, cudaFuncCachePreferShared);
– cudaFuncSetCacheConfig(MyKernel, cudaFuncCachePreferL1);
• L1 sirve para resguardar registros o acceso a datos
desalineados.
• Las líneas de cache de L1 son de 128 bytes mientras
que las de L2 son de 32 bytes.
• Que haya un hit en cache de L1 no implica una mejora
en el rendimiento (incluso puede empeorar).
• Memoria Global con Cache L1 y L2:-Xptxas -dlcm=ca
• Solo L2: -Xptxas -dlcm=cg
Manejo de Memoria en CUDA
22
Ejemplo Accesos Con y Sin Cache
Cada thread del warp pide
una palabra de 4 Bytes. 128
Bytes en total.
Todas las direcciones caen en
una línea de cache.
Caching Load: una única
transacción.
Bus al 100%
Non-Caching Load: cache
miss. Cuatro transacciones
de 32 Bytes.
Bus al 100%
Manejo de Memoria en CUDA
23
Ejemplo Accesos Con y Sin Cache
Las direcciones caen en dos
líneas de cache (desalineado).
Caching Load: dos transacciones.
Bus al 50%. (Se necesitan 128
Bytes, se mueven 256).
Non-Caching Load: por estar
desalineados caen en 5
segmentos de 32 Bytes.
Bus al 80%
Las direcciones caen en N en
líneas de cache distintas.
Caching Load: dos transacciones.
Bus al 128/(N*128) %
Non-Caching Load: cache miss.
Bus al 128/(N*32)%
Manejo de Memoria en CUDA
24
Ejemplo Accesos Con y Sin Cache
Cada thread del warp pide
una palabra de 4 Bytes. 128
Bytes en total.
Todas las direcciones caen en
una línea de cache.
Caching Load: una única
transacción.
Bus al 100%
Non-Caching Load: cache
miss. Cuatro transacciones
de 32 Bytes.
Bus al 100%
Manejo de Memoria en CUDA
25
Procesamiento de los Datos
• Una vez que fueron cargados los datos de
memoria global, se procesan.
• Hay que evitar seguir leyendo los datos de
memoria global (mucha latencia).
• En algunas aplicaciones threads dentro de un
mismo bloque deben acceder a los mismos
datos.
• En estos casos voy a cargar los datos en
memoria compartida y manipularlos ahí.
Manejo de Memoria en CUDA
26
Utilización de Memoria Compartida
Ciclo de Trabajo
Datos en Memoria de Host
En Memoria de Device (Memoria Global)
Se cargan en Memoria Compartida
Procesamiento de los Datos
Resultados en Memoria Compartida
Resultado en Memoria Global
Resultados en Memoria de Host
Manejo de Memoria en CUDA
27
Implementación de Memoria
Compartida (HW)
•
•
•
•
En Tesla (G80 y GT200 o T10)
Memoria Compartida ubicada en
el SM.
16 kBytes de Memoria
Compartida por SM.
El espacio se comparte entre
todos los bloques ejecutándose en
el SM. (HW)
Los datos solo se pueden
compartir entre threads del
mismo bloque (SW).
Manejo de Memoria en CUDA
28
Bancos de Memoria Compartida
• Implementada con 16 bancos organizados
para que palabras sucesivas de 32 bits
accedan a bancos distintos y sucesivos.
• Cada banco tiene un ancho de banda de 32
bits / 2 clocks.
• Un pedido de acceso a memoria compartida
realizado por un warp se divide en dos
transacciones.
• Si más de un thread quiere acceder al mismo
banco se serializan los accesos. (Conflicto de
Bancos)
• Si no hay conflicto de bancos, rendimiento
comparable a registros.
• Tiene Broadcast.
Manejo de Memoria en CUDA
29
Bancos de Memoria Compartida
• No hay conflictos de bancos si cada thread de cada
medio warp accede a un banco distinto.
Manejo de Memoria en CUDA
30
Conflicto de Bancos
• Stride: salto entre datos contiguos.
• Si hace que dos threads accedan al mismo dato, se serializan los
accesos.
Manejo de Memoria en CUDA
31
Conflicto de Bancos (II)
• Si tengo los threads tid y tid+n voy a tener conflicto si
stride*n es múltiples del nº de bancos.
• Si el stride no es divisor de 16, no hay conflictos.
• Si voy a leer o escribir datos de 1 o 2 bytes, será muy
probable que tenga conflicto de bancos:
– __shared__ char datos[NUM_THREADS];
– char aux = datos[Base + threadIdx.x];
– char aux = datos[Base + threadIdx.x*4];
Conflicto
Sin Conflicto
• Para datos mayores a 32 bits voy a tener
indefectiblemente conflictos (double o estructuras).
• Si todos los threads acceden al mismo banco ->
Broadcast -> No hay conflicto.
Manejo de Memoria en CUDA
32
Bancos de Memoria Compartida en
Fermi
• Memoria compartida con 32 bancos de manera que
palabras contiguas de 4 bytes queden en bancos
contiguos.
• Cada banco 32 bits / 2 clocks.
• Ahora si puede haber conflicto entre el primer y el
segundo medio warp.
• Hay accesos de 64 y 128 bits. No hay más conflictos en
array de doubles.
• Si tengo estructuras de 128 bits seguramente haya
conflicto entre pares de bancos.
Manejo de Memoria en CUDA
33
Ejemplos de Acceso a Bancos
• Utilización de float 3 en Memoria Compartida sin
conflicto de bancos:
• Acceso a un array 2D __shared__ mat[32][32];
Conflicto de Bancos
x16 (Tesla)
x32(Fermi)
Convierto a __shared__ mat[32][33];
La última columna la lleno con ceros
Manejo de Memoria en CUDA
34
Pendientes….
•
•
•
•
Memoria de Textura
Memoria Constante
Memoria de Host Pinned
Copias Asincrónicas de Memoria Host-Device
Manejo de Memoria en CUDA
35
 0
0