UNIVERSIDAD SIMÓN BOLÍVAR DECANATO DE ESTUDIOS PROFESIONALES COORDINACIÓN DE TECNOLOGÍA E INGENIERÍA ELÉCTRICA MODELO DE LA MÁQUINA DE INDUCCIÓN CONSIDERANDO LA SATURACIÓN Por: Daniel Andrés Delgado Palacios PROYECTO DE GRADO Presentado ante la Ilustre Universidad Simón Bolívar como requisito parcial para optar al título de Ingeniero Electricista Sartenejas, Noviembre de 2012 UNIVERSIDAD SIMÓN BOLÍVAR DECANATO DE ESTUDIOS PROFESIONALES COORDINACIÓN DE TECNOLOGÍA E INGENIERÍA ELÉCTRICA MODELO DE LA MÁQUINA DE INDUCCIÓN CONSIDERANDO LA SATURACIÓN Por: Daniel Andrés Delgado Palacios Realizado con la asesoría de: Prof. José Manuel Aller PROYECTO DE GRADO Presentado ante la Ilustre Universidad Simón Bolívar como requisito parcial para optar al título de Ingeniero Electricista Sartenejas, Noviembre de 2012 Modelación de la Máquina de Inducción Considerando la Saturación Realizado por: Daniel Delgado La máquina de inducción opera sin entrar en saturación en su condición nominal, a diferencia de la máquina síncrona cuyos puntos de operación están por encima del codo de saturación en la característica magnética de la máquina. Sin embargo, si se pretende operar una máquina asíncrona con puentes convertidores de tipo asimétrico es necesario que el modelo de la máquina considere la saturación en vista de que dicho puente convertidor es capaz de inyectar corriente de secuencia cero e incluso niveles DC a la máquina, la cual puede saturar el núcleo ferromagnético. En este trabajo, se utiliza el modelo de la máquina de inducción en coordenadas primitivas definiendo los flujos en cada fase del estator y rotor como variables de estado. Se hace uso del concepto de grados de saturación como la relación entre la corriente saturada necesaria para producir el enlace de flujo existente en una bobina determinada, y la corriente lineal, correspondiente a la corriente asociada al flujo de operación cuando la característica magnética es una línea recta que parte del origen. Los grados de saturación definidos de esta manera son mayores a la unidad y permiten considerar las variaciones de las permeanzas en el camino magnético de acuerdo a lo establecido por la característica de vacío del convertidor. Así, las matrices de inductancias del modelo de la máquina en coordenadas primitivas se ven modificadas por los grados de saturación. Como cada fase se satura de manera diferente en el tiempo, esto de acuerdo a la posición del campo magnético rotatorio, cada una de las fases del estator y rotor tendrán un grado de saturación diferente en cada instante, el cual debe ser calculado para determinar la modificación de cada término de la matriz de inductancia. El modelo, simulado de esta forma permite obtener los valores instantáneos de las corrientes distorsionadas cuando se aumenta el flujo (tensión del estator) a niveles por encima del nominal y se tiene una característica magnética saturada. iv Al profesor José Manuel Aller, por haberme guiado continuamente durante el desarrollo de este trabajo y por haberme enseñado cosas nuevas en el área de máquinas eléctricas. Al profesor Alexander Bueno, por habernos acompañado en los ensayos experimentales realizados como parte del desarrollo del trabajo. A mi madre, Iraida Palacios por alentarme constantemente a seguir adelante durante toda mi etapa académica y aún más en estos últimos meses. A mi padre, Manuel Delgado por ser apoyo en los momentos de dificultad. A mis hermanos, Joan Delgado, Judely Delgado y Erwuin Delgado por estar siempre atentos a mi desenvolvimiento y desarrollo académico. A mis apreciados amigos, a quienes respeto y admiro por la sublime combinación de cualidades y defectos que los hacen ser especiales en mi vida. A ellos que me han acompañado durante mi carrera, dándome ánimos y apoyándome constantemente. A ellos porque han sido parte fundamental para llegar hasta aquí. A ustedes, porque sé que siempre estarán allí. Daniel Delgado, Junio 2012 v Índice general Índice general vi Índice de tablas ix Índice de figuras x Lista de símbolos xii Lista de abreviaturas xvi INTRODUCCIÓN 1 1 HISTÉRESIS 1.1. Descripción del comportamiento . . . 1.2. Pérdidas por histéresis . . . . . . . . 1.2.1. Pérdidas por histéresis rotatoria[8] . 1.3. Histéresis en los transformadores . . . . . . 4 4 5 6 7 . . . . 10 10 11 12 13 . . . . . . . . . . . . . . . . . . . . . . . . 2 LA SATURACIÓN 2.1. Saturación en los convertidores electromecánicos 2.2. Determinación de la curva de saturación . . . . 2.3. Modificación de las inductancias . . . . . . . . . 2.3.1. Grados de saturación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 MODELOS DE SATURACIÓN EN VECTORES ESPACIALES 15 3.1. Modelo de enlaces de flujos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 3.2. Modelo en corrientes [5] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 4 MODELO DE SATURACIÓN EN COORDENADAS αβ 19 4.1. El modelo en coordenadas αβ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 4.2. Consideración de la saturación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 5 MODELO DE SATURACIÓN EN COORDENADAS PRIMITIVAS 23 5.1. La máquina de inducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 5.2. Modificación de las ecuaciones de la máquina . . . . . . . . . . . . . . . . . . . 24 6 ENSAYOS EXPERIMENTALES 28 vi 6.1. Características del convertidor . . . . . . . . . 6.2. Parámetros . . . . . . . . . . . . . . . . . . . 6.2.1. Resistencias . . . . . . . . . . . . . . . . . . 6.2.2. Corrección de la resistencia por temperatura 6.2.3. Pruebas de vacío y rotor bloqueado . . . . . 6.2.3.1.Prueba de vacío . . . . . . . . . . . . . . . . 6.2.3.2.Prueba de rotor bloqueado . . . . . . . . . . 6.2.4. Cálculo optimizado de los parámetros[1] . . 6.3. Determinación de la curva de magnetización . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 29 29 30 32 32 34 37 39 7 RESULTADOS 43 7.1. Curva de saturación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 7.2. Comparación de los modelos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 CONCLUSIONES Y RECOMENDACIONES 53 REFERENCIAS BIBLIOGRÁFICAS 55 A VECTORES ESPACIALES 56 A.1. Definición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56 A.2. Potencia Activa y Reactiva Instantánea . . . . . . . . . . . . . . . . . . . . . . . 57 A.3. Interpretación Física . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58 B MÉTODO DE EULER 60 B.1. Modo Matricial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60 C PROGRAMA COMPUTACIONAL PARA EL MODELO DE LOS ENLACES DE FLUJOS 62 D PROGRAMA COMPUTACIONAL PARA EL MODELO EN CORRIENTES 67 E PROGRAMA COMPUTACIONAL PARA EL MODELO EN COORDENADAS αβ 73 F PROGRAMA COMPUTACIONAL PARA EL MODELO EN COORDENADAS PRIMITIVAS 79 G PUENTE ASIMÉTRICO 85 G.1. Puente convencional y puente asimétrico . . . . . . . . . . . . . . . . . . 85 G.2. Operación del puente asimétrico . . . . . . . . . . . . . . . . . . . . . . . . 86 vii G.3. Aplicaciones del puente asimétrico . . . . . . . . . . . . . . . . . . . . . . viii 86 Índice de tablas 6.1. Datos nominales de la máquina de inducción . . . . . . . 6.2. Bases del sistema . . . . . . . . . . . . . . . . . . . . . . 6.3. Resistencias entre dos terminales del rotor . . . . . . . . 6.5. Relación de transformación entre el estator y el rotor . . 6.6. Resistencias en el estator . . . . . . . . . . . . . . . . . . 6.4. Resistencia del rotor . . . . . . . . . . . . . . . . . . . . 6.7. Resistencias en el estator de la máquina una vez operada 6.8. Resistencias del estator y rotor en por unidad . . . . . . 6.9. Variables de la operación en vacío . . . . . . . . . . . . . 6.10. Variables de la operación a rotor bloqueado . . . . . . . 6.11. Parámetros de la máquina. . . . . . . . . . . . . . . . . . 6.12. Ecuaciones de los polinomios. . . . . . . . . . . . . . . . ix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 29 29 30 30 30 31 32 34 36 39 41 Índice de figuras 1.1. 1.2. 1.3. 1.4. Curva de primera imanación [8]. . . . . . . . . . . . . . . . . . . . . . . . . . . . Energía en un ciclo de histéresis [8]. . . . . . . . . . . . . . . . . . . . . . . . . Corriente de excitación de un transformador (oscilograma)[8] . . . . . . . . . . . Terceros armónicos en las corrientes de excitación de un transformador trifásico en conexión delta [8]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.5. Corriente de línea en un trasformador trifásico conectado en delta [8]. . . . . . . 5 6 7 2.1. Curva de saturación del Hierro [3] . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2. Curva de histéresis de un núcleo ferromagnético [3] . . . . . . . . . . . . . . . . 2.3. Determinación de los grados de saturación en la máquina sincrónica [1] . . . . . 11 12 14 3.1. Diagrama de flujo para el modelo de los enlaces de flujo . . . . . . . . . . . . . . 3.2. Diagrama de Flujo para el modelo en corrientes . . . . . . . . . . . . . . . . . . 17 18 4.1. Máquina en coordenadas αβ. [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2. Diagrama de flujo para el modelo en coordenadas αβ. . . . . . . . . . . . . . . . 4.3. Diagrama de flujo para el cálculo de los grados de saturación. . . . . . . . . . . 20 22 22 5.1. Diagrama de flujo para el modelo en coordenadas primitivas . . . . . . . . . . . 5.2. Diagrama de flujo para el cálculo de los grados de saturación de la máquina . . 26 27 6.1. Efecto de la temperatura sobre la resistencia del cobre.[4] . . . . 6.2. Tensión en vacío . . . . . . . . . . . . . . . . . . . . . . . . . . 6.3. Corriente en vacío . . . . . . . . . . . . . . . . . . . . . . . . . . 6.4. Potencia instantánea . . . . . . . . . . . . . . . . . . . . . . . . 6.5. Tensión a rotor bloqueado . . . . . . . . . . . . . . . . . . . . . 6.6. Corriente a rotor bloqueado . . . . . . . . . . . . . . . . . . . . 6.7. Potencia instantánea . . . . . . . . . . . . . . . . . . . . . . . . 6.8. Circuito equivalente durante la prueba de rotor bloqueado [3] . 6.9. Circuito equivalente de la máquina de inducción.[1] . . . . . . . 6.10. Curvas de histéresis . . . . . . . . . . . . . . . . . . . . . . . . . 6.11. Determinación de los puntos extremos en el ciclo de histéresis . 6.12. Curva de saturación resultante . . . . . . . . . . . . . . . . . . . 6.13. Aproximación polinómica por mínimos cuadrados de la curva de . . . . . . . . . . . . . 31 32 32 33 34 35 36 37 38 40 40 41 42 7.1. Curva de saturación simplificada . . . . . . . . . . . . . . . . . . . . . . . . . . 43 x . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . saturación . . . . . . . . . . . . . . . . . . . . . . . . . . 8 9 7.2. 7.3. 7.4. 7.5. 7.6. 7.7. 7.8. 7.9. Flujos en el estator de la máquina . . . . . . . . . Corrientes en el estator . . . . . . . . . . . . . . . Corrientes en el estator (detalle) . . . . . . . . . . Espectro armónico de las corrientes del modelo en Corrientes absorbidas por la máquina . . . . . . . Par eléctrico . . . . . . . . . . . . . . . . . . . . . Velocidad . . . . . . . . . . . . . . . . . . . . . . Corriente en el estator. Máquina cargada s = 0,04 . . . . . . . . 44 46 47 48 49 50 51 52 A.1. Representación gráfica del vector espacial de un sistema trifásico [1]. . . . . . . . 57 G.1. Inversor trifásico convencional. [2] . . . . . . . . . . . . . . . . . . . . . . . . . . G.2. Inversor trifásico con puente asimétrico.[7] . . . . . . . . . . . . . . . . . . . . . 85 86 xi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . coordenadas primitivas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Lista de símbolos [Ler ] es la matriz de inductancias mútuas de acoplamiento estator-rotor [Lme ] es la matriz de inductancia de magnetización del estator [Lmr ] es la matriz de inductancia de magnetización del rotor [Lre ] es la matriz de inductancias mútuas de acoplamiento rotor-estator λs es el enlace de flujo magnético en el estator λae es el enlace de flujo del estator en la fase a λar es el enlace de flujo del rotor en la fase a λbe es el enlace de flujo del estator en la fase b λbr es el enlace de flujo del rotor en la fase b λce es el enlace de flujo del estator en la fase c λcr es el enlace de flujo del rotor en la fase c λeα es el enlace de flujo en la bobina α del estator λeβ es el enlace de flujo en la bobina β del estator λrα es el enlace de flujo en la bobina α del rotor λrβ es el enlace de flujo en la bobina β del rotor ωr es la velocidad del rotor − → λm es el vector espacial de enlaces de flujos de magnetización < es la reluctancia de la máquina λ~r es el vector espacial de enlaces de flujos en el rotor λ~s es el vector espacial de enlaces de flujos en el estator i~s es el vector espacial de las corrientes por el estator v~s es el vector espacial tensiones en el estator ℘ es la permenza del camino magnético xii is es la corriente por las bobinas del estator I0 es la corriente de la prueba de vacío iae es la corriente del estator en la fase a iar es la corriente del rotor en la fase a ibe es la corriente del estator en la fase b ibr es la corriente del rotor en la fase b ice es la corriente del estator en la fase c icr es la corriente del rotor en la fase c ieα es la corriente en la bobina α del estator ieβ es la tensión en la bobina β del estator if aselineal es la corriente de fase lineal de la máquina if asesat es la corriente de fase saturada de la máquina irα es la corriente en la bobina α del rotor irβ es la tensión en la bobina β del rotor IRB es la potencia corriente a rotor bloqueado Lm es la inductancia de magnetización de la máquina Lr es la inductancia de dispersión del rotor Ls es la inductancia de dispersión del estator L0 es la inductancia promedio de las inductancias transitorias y en régimen permanente (Lms y Lmt ) L2 es la semi diferencia de las inductancias transitorias y en régimen permanente (Lms y Lmt ) Lσe es la inductancia de dispersión del estator Lσr es la inductancia de dispersión del rotor Ler es la inductancia mútua de acoplamiento estator-rotor xiii Llin es la inductancia lineal de la máquina Lme es la inductancia de magnetización del estator Lmr es la inductancia de magnetización del rotor Lms es la inductancia de magnetización en estado estacionario Lmt es la inductancia de magnetización en estado transitorio Lre es la inductancia mútua de acoplamiento rotor-estator Lsat es la inductancia saturada de la máquina P0 es la potencia activa de la prueba de vacío Q0 es la potencia reactiva de la prueba de vacío QRB es la potencia reactiva a rotor bloqueado Rs es la resistencia del estator Rm es la resistencia de la rama magnetizante de la máquina (circuito equivalente de la máquina) S es el grado de saturación Sαe es el grado de saturación de la bobina α del estator Sαr es el grado de saturación de la bobina α del rotor Sβe es el grado de saturación de la bobina β del estator Sβr es el grado de saturación de la bobina β del rotor Sae es el grado de saturación de la fase a del estator Sar es el grado de saturación de la fase a del rotor Sbe es el grado de saturación de la fase b del estator Sbr es el grado de saturación de la fase b del rotor Sce es el grado de saturación de la fase c del estator Scr es el grado de saturación de la fase c del rotor xiv vs es la tensión en el estator V0 es la tensión de la prueba de vacío vae es la tensión del estator en la fase a var es la tensión del rotor en la fase a vbe es la tensión del estator en la fase b vbr es la tensión del rotor en la fase b vce es la tensión del estator en la fase c vcr es la tensión del rotor en la fase c veα es la tensión en la bobina α del estator veβ es la tensión en la bobina β del estator vrα es la tensión en la bobina α del rotor vrβ es la tensión en la bobina β del rotor X1 es la reactancia del estator (circuito equivalente de la máquina) X1 es la reactancia del rotor (circuito equivalente de la máquina) Xm es la reactancia de la rama magnetizante de la máquina (circuito equivalente de la máquina) xv Lista de abreviaturas AC Corriente Alterna (del inglés Alternating Current). DC Corriente Directa o Continúa (del inglés Direct Current). Fmm Fuerza Magnetomotriz xvi 1 INTRODUCCIÓN El fenómeno de la magnetización conlleva a hacer consideraciones atómicas y subatómicas a la hora de explicar su mecanismo. En este sentido, se definen las corrientes atómicas sin transporte de carga y son producidas por los electrones ligados al núcleo del átomo, son éstas las fuentes del magnetismo [11]. Bajo esta concepción, la magnetización queda determinada por la naturaleza dipolar del material. Un electrón circulando alrededor de un núcleo (como lo establece la física clásica) es equivalente a una corriente eléctrica circulando alrededor de la órbita. Los dos tipos de movimientos del electrón son el orbital y el espín. En consecuencia posee dos momentos magnéticos asociados a estos tipos de movimientos. El electrón posee así un momento magnético que es el resultado de sumar ambos momentos magnéticos[11]: m ~t = m ~s+m ~0=− e e~ps − p~0 me 2me (1) Con p~s y p~0 los momentos magnéticos de espín y orbital respectivamente. Sin embargo, considerar el modelo del átomo clásico no es correcto ya que la velocidad del electrón moviéndose alrededor del núcleo es muy alta, por lo tanto, su comportamiento debe ser descrito por la mecánica cuántica. De esta manera, los momentos magnéticos orbital y de espín quedan definidos por los números cuánticos correspondientes. A continuación se definen las expresiones para los momentos angulares según la mecánica cuántica: p~0 = ~l~ (2) p~s = ~s~ (3) Donde ~l y ~s son el número cuántico del momento angular orbital y de espín, ~ es la constante modificada de Planck. Una vez definidos los momentos angulares, se pueden determinar los momentos magnéticos. Lo anterior constituye la base elemental del magnetismo, lo que permite visualizar cuáles son los elementos que intervienen a nivel atómico en el proceso de magnetización. De esta manera conviene hacer referencia a los materiales ferromagnéticos los cuales, como ya se sabe poseen espines orientados en paralelo. En estos materiales se da una magnetización espontánea como resultado del momento magnético de cada espín. Sin embargo estos elementos suelen estar en un estado desmagnetizado, esto gracias a que internamente existen divisiones denominadas dominios, los cuales se encuentran orientados de tal manera que la magnetización resultante es nula. 2 Bajo esta configuración interna del material, cuando el mismo es sometido a un campo magnético, los dominios tienden a orientarse con éste y es de esta manera como se da el fenómeno de la magnetización. El fenómeno de la histéresis (tema que se desarrolla en el capítulo 1) es un efecto macroscópico, debido a la rotación o variación de tamaño de los dominios magnéticos [11]. Los dominios se forman gracias a un balance energético entre cuatro energías diferentes: Energía de intercambio, energía magnetoestática, energía anisotrópica magnetocristalina y energía anisotrópica magnetoelástica. A continuación una breve descripción de estas energías: 1. La energía de intercambio permite la orientación en paralelo o antiparalelo de los espines, lo que permite la formación del dominio como tal. 2. La energía magnetoestática es debida a la interacción entre los momentos del material y el campo aplicado [11]. 3. La energía de anisotropía es la que de alguna manera regula la la deformación espontánea de un material. Tiende a hacer disminuir las paredes de los dominios [11]. Todas estás energías en equilibrio permiten que los dominios coexistan en condiciones de mínima energía. Las paredes de los dominios no son más que una zona de transición entre un dominio y otro. Todo lo descrito hasta este momento define las bases fundamentales en el proceso de la magnetización de un material ferromagnético al estar en presencia de un campo, lo que a su vez permite el estudio de la saturación del núcleo de las máquinas eléctricas, las cuales de acuerdo al tipo de máquina se ven más o menos afectadas por este fenómeno. Las máquinas de inducción por lo general operan por debajo del codo de saturación, lo que garantiza que las inductancias de la máquina en los modelos se mantengan constantes independientemente del punto de operación. Sin embargo, existen casos en los que la consideración de característica magnética lineal no es válida, en [12] se mencionan varios casos en los que la autora considera que es indispensable considerar la saturación del convertidor: al trabajar con niveles de flujo inferiores o superiores al nominal, generadores de inducción en los que la característica magnética es de suma importancia al dimensionar el banco de condensadores, en regímenes transitorios en los que se encuentran envueltas corrientes elevadas, en este último caso el modelo saturado proporciona valores más reducidos de par gracias a que la inductancia magnetizante se reduce. La motivación de este trabajo radica en la posibilidad de alimentar la máquina de inducción, de manera controlada, con un puente asimétrico, el cual como se puede ver en [7], puede inyectar corrientes de secuencia cero o 3 incluso niveles de corriente continua no nulo en el núcleo del transformador, lo que puede ocasionar la saturación del núcleo. En este sentido, el modelo que se desarrollará en este trabajo permite que se pueda controlar la saturación de la máquina de inducción cuando es alimentada con un convertidor asimétrico. CAPÍTULO 1 HISTÉRESIS El fenómeno de la magnetización es empleado ampliamente hoy día en distintas tecnologías, valga citar los discos duros que consisten de dos platos de material ferromagnético girando a muy alta velocidad, un cabezal se encarga de modificar la magnetización de cada zona de los platos (escritura) y de medir su polarización (lectura). Cada pico en los polos magnéticos simboliza un 1 binario mientras que donde no se registran picos se interpreta un 0. Para estos efectos no solo importa la inducción magnética a la que es sometido el material sino que además es de gran relevancia las magnetizaciones pasadas, los materiales ferromagnéticos presentan una cierta memoria. El fenómeno de la magnetización va de la mano con el de histéresis que consiste en la capacidad que tiene el material ferromagnético que fue sometido a un campo de mantener cierto magnetismo en ausencia de dicho campo. 1.1. Descripción del comportamiento Para describir el fenómeno de la histéresis es necesario tener la configuración que permita controlar la intensidad de campo magnético, esto se logra, por ejemplo, mediante un toroide por el que se hace circular a voluntad la corriente deseada. Se supone que el material no se encuentra inicialmente magnetizado si se aumenta la intensidad de campo hasta un valor +Hmáx (figura 1.1), la característica sigue la curva oab que lleva por nombre curva de primera imanación. Al disminuir el valor de H, se sigue la ruta bc, en el punto c se tiene lo que es conocido como magnetismo remanente, el cual está caracterizado por la existencia de magnetización a pesar de haberse anulado la causante del fenómeno. Dicha magnetización solo se anula cuando se está en presencia de una intensidad de campo magnético igual a od. Al continuar disminuyendo la intensidad se alcanza el punto 0 0 0 0 b , al volver aumentar H se siguen los puntos b c d e, hasta este punto se ha completado un ciclo completo (+Hmáx −Hmáx ) pero aún este ciclo es abierto. Luego de varios ciclos se llega a tener una curva cerrada la cual es conocida comúnmente como ciclo de histéresis. 5 Figura 1.1: Curva de primera imanación [8]. 1.2. Pérdidas por histéresis La histéresis es la propiedad que tiene el material de oponerse a cambios magnéticos [8], esta oposición implica un gasto de energía cuando el material se encuentra sometido a un campo magnético cíclico, este gasto de energía se refleja en calentamiento del material. Para definir las pérdidas, es conveniente recordar que la densidad volumétrica de energía absorbida por un material que pasa de una inducción magnética B1 a B2 se puede determinar mediante la ecuación 1.1. ˆ B2 HdB w= (1.1) B1 Conocida la curva de imanación B(H) se puede entonces determinar la energía que maneja un ciclo completo de histéresis a partir de la ecuación 1.1. Como se ha podido observar de la figura 1.1, en un ciclo de histéresis, la inducción magnética es menor cuando el campo magnético aumenta que cuando éste disminuye (esta es la razón principal del nombre que se le asigna a este fenómeno, ya que se presenta una oposición); por lo tanto, al calcular la energía, ésta será mayor cuando aumenta H y bastante menor cuando disminuya, este hecho puede observarse en la figura 1.2 donde al pasar desde a hasta b se consume una energía igual al área sombreada en el apartado a de la figura, cuando se pasa desde b hasta c la energía es cedida a la excitación con lo cual el área encerrada tiene signo contrario al caso anterior, con lo cual en el intervalo H ≥ 0 la energía neta es consumida por el material y 6 es igual al valor del área encerrada por en ciclo de histéresis, como dicho ciclo es simétrico, ocurre lo mismo para el intervalo H ≤ 0. Figura 1.2: Energía en un ciclo de histéresis [8]. 1.2.1. Pérdidas por histéresis rotatoria[8] Aún cuando el campo magnético no varíe en el tiempo si el volumen imantado varía su posición al rotar alrededor de un eje produce un fenómeno conocido como pérdidas por histéresis rotatoria. En una máquina eléctrica por tanto se da la histéresis alterna y la histéresis rotatoria, las cuales generan pérdidas de manera independiente. La histéresis rotatoria es debida a que el elemento inductor (polo) produce un campo en una dirección determinada y el inducido, influenciado por dicho campo, rota en su propio eje y la zona del inducido que inicialmente estaba recibiendo el campo en una dirección posteriormente estará en presencia del polo opuesto y en consecuencia de un campo en dirección contraria, esto produce que cíclicamente, el inducido reciba un campo alterno debido a la rotación del mismo. 7 Las pérdidas de este tipo son esencialmente varias veces mayor que las producidas por la histéresis alterna bajo un campo magnético de las mismas características. Sin embargo, un material sometido a ambos fenómenos (histéresis alterna e histéresis rotatoria) presenta menores pérdidas a que si estuviese sometida exclusivamente a la histéresis rotatoria. 1.3. Histéresis en los transformadores Cuando un transformador es alimentado en vacío con tensión sinusoidal, las corrientes en el lado de baja presenta contenidos armónicos que pueden tener importantes influencias en las líneas de potencia adyacentes al provocar interferencia inductiva, además pueden exagerarse ante efectos de resonancia con las capacitancias de las líneas o cables. En la figura 1.3 se puede observar un oscilograma con la forma de onda de un transformador de 60 Hz alimentado a 200V efectivos, nótese que la forma de la corriente al aumentar es distinta que al disminuir lo cual es debido a lo asimétrico del ciclo de histéresis al aumentar y disminuir el campo magnético H. Figura 1.3: Corriente de excitación de un transformador (oscilograma)[8] Las corrientes de Foucault se oponen a la variación de flujo, por lo tanto, si se añade esta componente, el ciclo de histéresis será más ancho, en consecuencia, el área de este ciclo será 8 proporcional a la pérdida total en el núcleo y no solo a las pérdidas por histéresis[8]. Si se considera un transformador trifásico en conexión delta cuya alimentación es senoidal, la forma de onda de las corrientes por cada fase sigue siendo la observada en la figura 1.3 con un desfase de 120º. La distorsión de la onda que se observa es característica de la presencia de terceros armónicos. Supóngase conocida las corrientes de excitación de cada fase (AB, BC, CA), como ya se dijo el desfase entre ellas es de 120º o un tercio del periodo de la onda, por lo tanto el tercer armónico de cada fase estará desfasado en tres tercios del periodo, es decir un periodo completo, lo que se traduce en un desfase nulo entre las tres formas de onda del tercer armónico de las corrientes de excitación. Lo mismo ocurre con todos los armónicos de orden superior múltiplos de tres. Figura 1.4: Terceros armónicos en las corrientes de excitación de un transformador trifásico en conexión delta [8]. En consecuencia, si se determina o se mide la corriente de línea del transformador, los terceros armónicos se anularán y la forma de onda de dicha corriente no presentará el pico característico que se ha descrito de la corriente de excitación. A continuación se observa la forma de onda de la corriente de línea. 9 Figura 1.5: Corriente de línea en un trasformador trifásico conectado en delta [8]. CAPÍTULO 2 LA SATURACIÓN 2.1. Saturación en los convertidores electromecánicos Cuando un convertidor electromecánico es alimentado con corriente alterna, las variaciones en el flujo son función directa de la tensión (en magnitud y frecuencia) aplicada [3]. dλs = vs − Rs is dt (2.1) En general, la caída de tensión en la resistencia es despreciable y la relación 2.1 permite obtener el enlace de flujo λe directamente una vez conocida la tensión ve . Conocido el enlace de flujo, la fuerza magnetomotriz también queda definida como el flujo neto (Φ = Nλ , con N el número de vueltas) dividido por la permeanza del camino magnético. F mm = Φ ℘ Asimismo, la fuerza magnetomotriz está definida como el número de vueltas por la corriente inyectada al convertidor. F mm = N i Las variaciones en el flujo causan variaciones en la corriente. Para un cierto rango de tensiones ve , la permeanza permanece invariable, por lo que la relación entre el flujo y la corriente es lineal. Sin embargo, al alcanzar un cierto nivel de tensión, la permeanza disminuye y las corrientes aumentan de forma no-lineal con el flujo. Es así como queda definida una curva de saturación para un convertidor electromecánico, en la cual se tiene una zona lineal donde la relación flujo-corriente es proporcional y una zona no-lineal donde para una pequeña variación de flujo (tensión) las corrientes se incrementan en una proporción mayor y se produce distorsión armónica en ellas. 11 Figura 2.1: Curva de saturación del Hierro [3] Observese la figura 2.1 donde se muestra la evolución de los dominios o dipolos magnéticos de un material ferromagnético sometido a un campo HA , si este campo es de magnitud muy pequeña se produce un crecimiento reversible caracterizado por el ensanchamiento de los dipolos que están orientados en paralelo a la dirección del campo, bajo estás condiciones, si se elimina el campo HA , la densidad de flujo B también desaparece. En la medida en que se aumenta el campo los dipolos se reorientan en la dirección del mismo lo cual produce un campo magnético adicional e interno que refuerza al campo externo que ha modificado los dipolos, esta zona de la curva es irreversible y si se elimina el campo externo, los dipolos quedan orientados y se tiene un magnetismo remanente dado por la nueva posición de los dipolos. El estado final del material (si se continúa aumentando el campo HA ) es la saturación, momento en el cual los dipolos se encuentran completamente alineados [3]. Este proceso permite comprender el desarrollo de la saturación a nivel atómico. Por lo general, la curva de saturación se expresa como la relación entre el flujo magnético (Φ = SB, con S igual al área transversal que atraviesa la densidad de flujo B) y la corriente ¸ (i = H dl) en vista de que dichas variables son proporcionales a B y H es valido utilizarlas en el análisis de la saturación de los convertidores electromecánicos. 2.2. Determinación de la curva de saturación Para determinar la curva de saturación de un convertidor electromecánico es necesario hacerlo operar en vacío ya que en esta condición no existe contrafuerza magnetomotriz que 12 contrarreste la saturación, de esta manera se debe incrementar progresivamente la tensión en el estator midiendo en cada paso la forma de onda de las corrientes y las tensiones en los bornes. Con estás variables se pueden determinar los flujos en el estator según la ecuación 2.1. Conocidos los flujos y las corrientes se pueden obtener las curvas de histéresis del convertidor para cada nivel de tensión en la figura 2.2 se puede observar dicha curva, la cual representa el comportamiento del material ferromagnético. De esta manera, la curva de magnetización se puede determinar a partir de los puntos extremos de cada una de las curvas de histéresis determinadas a distintos niveles de tensión. Figura 2.2: Curva de histéresis de un núcleo ferromagnético [3] 2.3. Modificación de las inductancias La característica de magnetización de la figura 2.1 representa la relación entre el flujo magnético que es directamente proporcional a la densidad de flujo magnético B y la corriente es proporcional a la intensidad de flujo magnético H según la ley de Ampere. Estas dos B variables están relacionadas entre sí mediante la permeabilidad del material (µ = H ). La característica de magnetización de un convertidor representa la variación de la permeanza del camino magnético que recorre el flujo[1], debido a que este parámetro es directamente proporcional a la permeabilidad del medio. ℘= µS l (2.2) En la ecuación 2.2, S representa la sección transversal por donde circula el flujo y l la longitud de recorrido de dicho flujo. De esta manera la inductancia de la máquina queda 13 determinada como sigue. (2.3) L = N1 N2 ℘ Con N1 y N2 el número de vueltas de la bobina 1 y 2 respectivamente. Cuando se trabaja con el convertidor saturado, las inductancias de magnetización dejan de ser constantes y pasan a depender del punto de operación en que se encuentre en un determinado momento. Esto es debido a que la permeanza del camino magnético cambia como consecuencia de la variación de la permeabilidad con la curva de saturación. Bajo esta consideración, las inductancias de la máquina se ven modificadas por los grados de saturación como se vio en la sección 2.1. Si se desea determinar la inductancia de magnetización entre dos bobinas, se debe considerar que el circuito magnético asociado está constituido por dos permeanzas en serie, como cada una posee 2l de camino magnético, dichas permeanzas tienen un valor igual al doble = 2℘). de la permeanza utilizada para el cálculo de la inductancia propia (℘1 = 2µS l ℘12 = 1 ℘1 1 + 1 ℘2 = 1 2℘ 1 + 1 2℘ = 4℘℘ =℘ 2℘ + 2℘ (2.4) Como las bobinas se consideran exactamente iguales y se desprecia el fenómeno de la saturación, la permeanza de la ecuación 2.4 es igual a la permeanza propia de la bobina. 2.3.1. Grados de saturación El estudio de la saturación en las máquinas sincrónicas es de suma importancia porque este convertidor mantiene sus puntos de operación por encima del codo de saturación. Así, en [1] se desarrolla la relación que hay entre las permeanzas no saturadas y las permeanzas saturadas. Se necesitará un determinado valor de corriente en la máquina no saturada y una magnitud mayor en la máquina saturada siempre que dichas corrientes induzcan un flujo que sea capaz de generar la fuerza electromotriz en el convertidor. Partiendo de este principio se establece que la permenza en operación lineal está relacionada con la permeanza en saturación mediante la relación entre las corrientes anteriormente mencionadas, dicha relación recibe el nombre de grado de saturación, el cual es un valor que puede ser fácilmente determinado a partir del estudio gráfico de la curva de magnetización. En la figura 2.3 se muestra el procedimiento que permite determinar los grados de saturación en la máquina sincrónica, en ella se usa la relación gráfica entre la tensión y la corriente de campo. En este trabajo se extiende el uso de dichos grados de saturación a las 14 Figura 2.3: Determinación de los grados de saturación en la máquina sincrónica [1] máquinas de inducción para modificar las permeanzas de los caminos magnéticos entre fase por lo cual la curva de saturación será la relación entre el flujo y la corriente por fase. S= if asesat if aselineal ⇒ Lsat = Llin ℘ ⇒ Lsat = N1 N2 s s (2.5) Redefinido los grados de saturación de esta manera, si se desea determinar la permeanza entre dos caminos magnéticos susceptibles a la saturación se hará según la ecuación 2.6. Se puede apreciar que la permeanza del camino magnético saturado es menor que la permeanza no saturada, lo cual es consistente porque de esta manera se limita el flujo en la medida en que se trabaja cerca de la zona de mayor saturación de la curva de magnetización. <1 = ℘12sat = s1 2℘ 1 < 1 < = <2 = = 2 2℘ 2 2℘ 1 + s2 2℘ = 4℘℘ = 2s1 ℘ + 2s2 ℘ ℘ s1 +s2 2 (2.6) CAPÍTULO 3 MODELOS DE SATURACIÓN EN VECTORES ESPACIALES Como bien es sabido las ecuaciones de la máquina pueden ser transformadas a vectores espaciales, lo que facilita y simplifica su análisis. Los modelos presentados en este capítulo se basan en las ecuaciones de la máquina en esta transformación. En investigaciones anteriores se han hecho estudios sobre la saturación de la máquina de inducción creándose modelos matemáticos donde se deja de considerar que la inductancia Lm , del circuito tradicional de la máquina en vectores espaciales, es constante. En estos modelos dicha inductancia varía de acuerdo a la curva de saturación del convertidor. 3.1. Modelo de enlaces de flujos Este modelo, desarrollado por Jie Dang, está basado en las ecuaciones de la máquina considerando como variables de estado los enlaces de flujo del estator y del rotor en vectores espaciales. dλ~s = v~s − Rs i~s dt (3.1) dλ~r = v~r − Rr i~r + jωr λ~r dt (3.2) Las corrientes pueden ser determinadas mediante las ecuaciones 3.3 y 3.4. → − → − → − λs = Ls is + Lm ir (3.3) → − → − → − λr = Lr ir + Lm is (3.4) → − → − Lr λs − Lm λr → − is = Ls Lr − L2m (3.5) 16 → − → − Ls λr − Lm λs → − ir = Ls Lr − L2m (3.6) Conocidas las corrientes en el estator y el rotor se determina el flujo de magnetización ~λm = Lm (i~s + i~r ). En cada iteración de la resolución numérica se corrige la inductancia Lm considerando la curva de magnetización como im = f (λm ). Al determinar la inductancia Lm = λm/im se está tomando en consideración los distintos puntos de saturación en los que se puede ubicar el convertidor al ser operado. 3.2. Modelo en corrientes [5] Este modelo utiliza las corrientes como variables de estado y además considera dos inductancias, una transitoria y una en estado estacionario, la primera mide el incremental, la pendiente en cada punto de la curva de magnetización y la segunda mide la inductancia para una reta que va desde el origen hasta el punto de operación de la máquina (inductancia lineal) y en la zona por debajo del codo de saturación ambas inductancias son iguales. El modelo es un poco más complejo matemáticamente y se basa en las ecuaciones 3.9 y 3.10 Lms = λm im (3.7) Lmt = dλm dim (3.8) di~s di~r di~∗ di~∗ v~s = Rs i~s + (Lσs + L0 ) + L0 + L2 ej2θ s + L2 ej2θ r dt dt dt dt v~r = Rr i~r +(Lσr +L0 ) (3.9) di~r di~r di~∗ di~∗ +L0 +L2 ej2θ s +L2 ej2θ r −jωr (Lσr +Lms )i~r −jωr Lms i~s (3.10) dt dt dt dt Donde L0 es el promedio de las inductancias transitorias y en régimen permanente, L2 es la semi diferencia de esas inductancias y θ el ángulo de la corriente de magnetización. De esta manera queda considerada la saturación al determinar las inductancias anteriores a partir de la curva de saturación de la máquina. En la figura 3.2 se presenta el diagrama de flujo para el modelo en corrientes explicado. 17 Inicio ~λe , ~λr , Lm Cálculo de las i h i h corrientes: ~i = [L]−1 ~λ Integración numérica: dλ~e ~e − Re i~e dt = v dλ~r ~ ~ dt = v~r − Rr ir+ jωr λr ∗ Te = 32 Lm =mag i~e + i~r λ~e ,λ~r Rama magnetizante: ~λm = Lm (i~s + i~r ) ~ ilin = L−1 mo λm isat = f ~λm No Lm = |isat − ilin | ≤ 10−4 |~λm | Sí Lm = Lm0 isat Lm Lm Figura 3.1: Diagrama de flujo para el modelo de los enlaces de flujo 18 Inicio i~s , i~r Cálculo del enlace de flujo de magnetización: ~ ~ ~ im = is + ir , λm = f ~im Corrientes de magnetización: isat = f (λm ) , ilin = L−1 m0 λm Sí No |isat − ilin | ≤ 10−4 Inductancia en estado estacionario: Lms = Lm0 Inductancia transitoria: m Lmt = dλ dim Inductancia en estado estacionario: m Lms = λim Inductancia transitoria: m Lmt = dλ dim mt L0 = Lms +L 2 Lmt −Lms L2 = 2 Integración numérica: ~∗ ~∗ ~ ~ ~ v~s = Rs is + (Lσs + L0 ) ddtis + L0 ddtir + L2 ej2θ ddtis + L2 ej2θ ddtir v~r = ~ Rr i~r + (Lσr + L0 ) ddtir ~∗ j2θ di~∗r ~ ~ + L2 ej2θ ddtis + L 2 e dt∗ − jωr (Lσr + Lms )ir − jωr Lms is Te = 32 Lms =mag i~e + i~r ~ + L0 ddtir Figura 3.2: Diagrama de Flujo para el modelo en corrientes i~s , i~r CAPÍTULO 4 MODELO DE SATURACIÓN EN COORDENADAS αβ El modelo que se presenta en este capítulo se basa en la representación de la máquina de inducción trfásica en un convertidor bifásico equivalente que considera la saturación de cada eje ortogonal entre sí, mediante la inclusión de los grados de saturación. Como es de esperarse la máquina debe ser alimentada con el vector espacial de tensiones que contiene toda la información del sistema trifásico. Se modifican de las inductancias de magnetización propias y mútuas para lograr la equivalencia de los sistemas bifásicos y trifásicos. 4.1. El modelo en coordenadas αβ La matriz de resistencia que permite modelar el comportamiento de la máquina de inducción solo contiene términos en la diagonal principal ya que no existen resistencias mútuas entre las bobinas del estator y del rotor. Por otra parte, la matriz de inductancias tiene en la diagonal principal las inductancias propias del estator y el rotor respectivamente; como las bobinas están en cuadratura no existe inductancia mútua entre las bobinas del estator. Cuando la bobina α del estator y α del rotor se encuntran alineadas (θ = 0), la inductancia mútua entre ellas es máxima, es por ello que el termino de la matriz asociado (elemento 1-3) se encuentra multiplicado por un cos θ, ocurre lo mismo en el caso de la bobina β del estator y β del rotor. La inductancia asociada a la bobina α del rotor y β del estator es máxima cuando θ = π2 por lo tanto este término de la matriz puede ser represntado con un senθ. En el caso de la inductancia entre el devanado β del rotor y α del estator el máximo ocurre cuando el ángulo es − π2 , por lo que el termino de la matriz está múltiplicado por un −senθ. Así, queda definida la matriz de inductancias, si se considera que dicha matriz es simétrica[1]. [v] = [R][i] + p[λ] = [R][i] + θ̇[τ (θ)][i] + [L(θ)]p[i] (4.1) 20 Figura 4.1: Máquina en coordenadas αβ. [1] 1 Te = [i]t [τ (θ)][i] 2 " [v] = ve vr h # = h veα veβ vrα vrβ " [λ] = [R] = [τ (θ)] = " it ; [i] = h # = h ie ir # λeα λeβ λrα λrβ h = h ieα ieβ irα irβ it it ; it it Le 0 Ler cosθ −Ler senθ 0 L L senθ L cosθ e er er ; [L] = ; L cosθ L senθ L 0 er er r −Ler senθ Ler cosθ 0 Lr 0 0 −Ler senθ −Ler cosθ 0 0 Ler cosθ −Ler senθ −Ler senθ Ler cosθ 0 0 −Ler cosθ −Ler senθ 0 0 Reα 0 0 0 0 Reβ 0 0 0 0 Rrα 0 0 0 0 Rrβ λe λr it (4.2) 21 4.2. Consideración de la saturación En el modelo definido en la sección anterior se desprecia la saturación ya que las inductancias de magnetización se asumen constantes y las matrices sólo dependen de parámetros geométricos. Un análisis análogo al llevado a cabo en el Capítulo 2 permite corregir las matrices con los grados de saturación. Recordar además que las inductacias propias Le y Lr pueden ser descompuestas en una inductancia de dispersión y una de magnetización. [L] = Lm Sαe Lσe + 0 Ler Sαe +Sαr 2 Ler er − SαeL+S senθ Sαe +Sαr cosθ βr 0 2 Lm Sβe Lσe + cosθ er − SαeL+S senθ βr 2 Ler Sβe +Sαr 2 Ler Sβe +Sβr 2 0 2 cosθ Sβe +Sβr 2 ; 0 m Lσr + SLβr Ler Ler Sβe +Sαr senθ 2 senθ Lσr + cosθ 0 Lm Sαr er er − SαeL+S − SαeL+S cosθ αr senθ βr 0 0 0 [τ (θ)] = Ler er − SαeL+S Sβe +Sαr cosθ αr senθ 2 2 Ler er cosθ − − SαeL+S Sβe +Sβr senθ βr 2 2 2 Ler Sβe +Sαr 2 cosθ 0 0 − Sβe +Sβr senθ 2 0 0 Ler 2 Para modelar la máquina de inducción trifásica en este sistema de coordenadas es necesario pasar del sistema de tres tensiones a dos, mediante la transformación a vectores espaciales se puede lograr. va = √ √ 2V cos(ωt); vb = 2V cos(ωt − vαβ = h 1 α α 2 ih 2π ); 3 va vb vc vc = √ 2V cos(ωt + it √ = 2π ) 3 3V ejωt (4.3) De donde, vα y vβ son la parte real e imaginaria de vαβ , respectivamente. En las figura 4.2 y 4.3 se muestra el diagrama de flujo correspondiente al modelo en coordenadas y el diagrama de flujo para el cálculo de los grados de saturación, respectivamente. 22 Inicio [λe ] [λ] = [λr ] Grados de saturación: sαe , sβe , sαr , sβr Matriz de inductancias: [L(θ, Sf e , Sf r )] Cálculo de corrientes: [i] = [L(θ, Sf e , Sf r )]−1 [λ] Integración numérica: p [λ] = [v] − [R] [i] Te = 21 [i]t [τ (θ)][i] Figura 4.2: Diagrama de flujo para el modelo en coordenadas αβ. Inicio λ Corriente linealizada y saturada: ilin = L−1 mo λ isat = f (λ) |isat − ilin | ≤ 10−3 No s= isat ilin Sí s=1 Salida = s Figura 4.3: Diagrama de flujo para el cálculo de los grados de saturación. CAPÍTULO 5 MODELO DE SATURACIÓN EN COORDENADAS PRIMITIVAS El campo magnético rotatorio de una máquina satura de manera diferente cada bobina de la misma de acuerdo a la ubicación en que este campo se encuentre en un instante de tiempo determinado. Tanto la ubicación espacial como la magnitud determinan la saturación de cada fase del convertidor, permitiendo observar las armónicas en las corrientes al momento de hacer trabajar la máquina en vacío o con niveles de tensión por encima del nominal. Las armónicas en las corrientes permiten verificar que el fenómeno de saturación afecta principalmente las corrientes de la máquina mientras que los flujos se mantienen senoidales (cuando se alimenta el estator con un sistema senoidal de tensiones) ya que estos últimos son el resultado de la integración de las tensiones inyectadas. 5.1. La máquina de inducción La máquina de inducción por lo general trabaja en la zona lineal de la curva de magnetización, es por ello que en las ecuaciones 5.1 y 5.2 las inductacias Lme , Lmr y Ler son consideradas invariables y pueden salir de las matrices correspondientes que únicamente dependen de la geometría del convertidor y son independientes de la característica magnética del mismo. [v] = [R][i] + p[λ] = [R][i] + θ̇[τ (θ)][i] + [L(θ)]p[i] (5.1) 1 Te = [i]t [τ (θ)][i] 2 (5.2) donde: " [v] = ve vr # h = h vae vbe vce var vbr vcr it it ; [i] = " ie ir # h = h iae ibe ice iar ibr icr it it ; 24 " [λ] = " [R] = = h λae λbe λce λar λbr λcr it it # " # [Lee ] [Ler ] Lσe [I] + Lme [S] Ler [C(θ)] ; [L(θ)] = = ; [Lre ] [Lrr ] Ler [C(θ)]t Lσr [I] + Lmr [S] # " # " d d d [0] L [L ] [L ] [C(θ)] er dθ ee er dθ = ; [τ (θ)] = dθ t d d d [L ] [L ] [C(θ)] [0] L re rr er dθ dθ dθ 1 0 0 1 − 12 − 12 0 0 0 [I] = 0 1 0 ; [S] = − 21 1 − 12 ; [0] = 0 0 0 ; 0 0 1 − 21 − 12 1 0 0 0 4π ) cos(θ + ) cos(θ) cos(θ + 2π 3 3 2π [C(θ)] = cos(θ + 4π ) cos(θ) cos(θ + ) ; 3 3 Re [I] [0] [0] Rr [I] # [λe ] [λr ] h # " ) cos(θ + 4π ) cos(θ) cos(θ + 2π 3 3 4π sen(θ) sen(θ + 2π ) sen(θ + ) 3 3 d 4π 2π [C(θ)] = − sen(θ + ) sen(θ) sen(θ + ) dθ 3 3 4π 2π sen(θ) sen(θ + 3 ) sen(θ + 3 ) 5.2. Modificación de las ecuaciones de la máquina Al considerar la saturación, las ecuaciones 5.1 y 5.2 se modifican por los grados de saturación como en el caso de la máquina en coordenadas αβ. Al igual que en ese caso, las únicas inductancias modificadas por los grados de saturación son las de magnetización Ler , Lre , Lme y Lmr , con esta consideración, resultan matrices que dependen tanto de la geometría de la máquina como del punto de operación en la curva de magnetización. Lme Sae L [Lme ] = − 2 Sbeme +Sae 2 Lme − 2 Sce +Sae 2 − Lme S +S 2 ae 2 be Lme Sbe − 2 Lme Sce +Sbe 2 Lme − 2 Sae +Sce 2 − Lme S +S 2 be 2 ce Lme Sce = Lme 1 Sae 1 − Sbe +S ae 1 − Sce +S ae 1 1 − Sae +S − Sae +S ce be 1 Sbe 1 − Sce +S be 1 − Sbe +S ; ce 1 Sce 25 [Lmr ] = Lmr [Ler ] = Ler 1 Sar 1 − Sbr +S ar 1 − Scr +S ar cos(θ) Sae +Sar 2 cos(θ+ 4π ) 3 Sbe +Sar 2 cos(θ+ 2π ) 3 Sce +Sar 2 1 1 − Sar +S − Sar +S cr br 1 Sbr 1 − Scr +S br cos(θ+ 2π ) 3 Sae +Sbr 2 cos(θ) Sbe +Sbr 2 cos(θ+ 4π ) 3 Sce +Sbr 2 1 − Sbr +S ; cr 1 Scr cos(θ+ 4π ) 3 Sae +Scr 2 cos(θ+ 2π ) 3 Sbe +Scr 2 cos(θ) Sce +Scr 2 Bajo estás modificaciones, la matriz [L(θ, Sf e , Sf r )] (con f = a, b, c) se hace muy sensible y el cálculo de su inversa no permite la correcta resolución numérica de las ecuaciones cuando se tiene como variables de estado las corrientes de la máquina. Por el contrario, si se toman los enlaces de flujo como variables de estado, la resolución del problema numérico es posible con menos dificultad en vista de que la inversa de la matriz de inductancias solo afecta en la pequeña caída de tensión Ri = R[L(θ, Sf e , Sf r )]−1 λ de la ecuación 5.1. El cálculo del par es realiza según la ecuación 5.2. En la figura 5.1 se muestra el diagrama de flujo que permite determinar el comportamiento de la máquina de inducción bajo condiciones de saturación. En la figura 5.2 se presenta el diagrama de flujo que permite calcular los grados de saturación del convertidor. 26 Inicio [λe ] [λ] = [λr ] Grados de saturación: sae , sbe , sce , sar , sbr , scr Matriz de inductancias: [L(θ, Sf e , Sf r )] Cálculo de corrientes: [i] = [L(θ, Sf e , Sf r )]−1 [λ] Integración numérica: p [λ] = [v] − [R] [i] Te = 21 [i]t [τ (θ)][i] Figura 5.1: Diagrama de flujo para el modelo en coordenadas primitivas 27 Inicio λ Corriente linealizada y saturada: ilin = L−1 mo λ isat = f (λ) |isat − ilin | ≤ 10−3 No s= isat ilin Sí s=1 Salida = s Figura 5.2: Diagrama de flujo para el cálculo de los grados de saturación de la máquina CAPÍTULO 6 ENSAYOS EXPERIMENTALES Se utilizó una máquina de inducción del Laboratorio de Conversión y Transporte de Energía de la Universidad Simón Bolívar. Se le realizaron pruebas de vacío en régimen permanente donde se le aumentó la tensión progresivamente, en cada paso se adquirieron las tensiones y corrientes instantáneas en el estator. Estas mediciones permiten determinar la curva de magnetización de la máquina. También se realizaron registros de estás variables en régimen transitorio y las pruebas básicas de vacío, rotor bloqueado y carga para comparar la respuesta del modelo planteado en este trabajo y las adquisiciones hechas en el laboratorio. 6.1. Características del convertidor En el laboratorio de Conversión de Energía Eléctrica de la Universidad Simón Bolívar, se utilizó una máquina de inducción de rotor bobinado para hacerle las mediciones de tensiones y corrientes en el estator. Se utilizó un transformador variable para ajustar progresivamente los valores de tensión en el estator de la máquina. Las corrientes fueron medidas a través de dos transformadores de corrientes conectados en las fases a y c. También se midieron las tensiones de línea ab y bc. Tabla 6.1: Datos nominales de la máquina de inducción Vn In Pn f pn fn ηn 240/416 V (4 − Y ) 16/9.2 A 4 kW 0.8 60 Hz 1710 rpm 29 Tabla 6.2: Bases del sistema Vbase Sbase Ibase Zbase 240V 4kV A 5,56A 43,2ohm Se miden las variables en régimen permanente para distintos niveles de tensión efectiva a la entrada del convertidor, en pasos de 10 V hasta alcanzar 280 V. Adicionalmente se registran las variables estatóricas durante los arranques de la máquina. Para procesar los datos adquiridos se eligen y determinan las bases que se van a utilizar para tener un sistema adimensional de unidades. En este caso se han seleccionado la base de tensión monofásica, como la bobina ha de ver 240V como tensión nominal en cualquier conexión, se elige ese número como la base de tensión. La potencia base se elige como la potencia en el eje 4kW. Así, la corriente y la impedancia base quedan determinadas como valores monofásicos. 6.2. Parámetros 6.2.1. Resistencias La máquina utilizada es de rotor bobinado conectado en Y por lo que se tiene acceso a los tres terminales de las bobinas, con la ayuda de un ohmetro se midió la resistencia equivalente entre un par de terminales a una temperatura de 23 ◦ C. Tabla 6.3: Resistencias entre dos terminales del rotor R12 470,6mΩ R23 479,5mΩ R31 502,4mΩ Las resistencias medidas anteriormente corresponden a la medición en serie de las resistencias de dos bobinas por lo que la resistencia de la bobina se puede aproximar a la mitad de cada bobina medida. 30 Tabla 6.5: Relación de transformación entre el estator y el rotor Tensión estator [V] 165.2 161 161.7 Tensión rotor [V] Relación de transformación (a) 56.4 2.9 57.1 2.8 55.1 2.9 Relación de transformación promedio 2.9 Tabla 6.6: Resistencias en el estator Rux Rvy Ruw Rpromedio 1005,7mΩ 1003,4mΩ 1004,6mΩ 1004,6mΩ Tabla 6.4: Resistencia del rotor R1 235,3mΩ R2 239,75mΩ R2 251,2mΩ Rpromedio 242,1mΩ La resistencia promedio presentada en la tabla 6.4 es necesario referirla al estator, para ello se determina la relación de transformación entre el rotor y el estator. Con el rotor abierto e inyectando tensión en el estator se mide la tensión inducida en las bobinas rotóricas. De esta manera, la resistencia del rotor vista desde el estator queda como sigue. Rr0 = 242,08mΩ(2,9)2 = 2,028Ω Para el caso del estator, se pueden medir las resistencias de cada bobina de forma independiente ya que se tiene acceso a ambos terminales de las bobinas. 6.2.2. Corrección de la resistencia por temperatura Como es sabido, la resistividad de un material varía con la temperatura, en la medida en que esta aumenta, el material conductor posee más resistencia al paso de la corriente. Particularmente en el caso del cobre, la resistencia mantiene una relación lineal con la temperatura entre un rango bien definido de temperaturas como se observa en la figura 6.1. La línea azul representa la relación real entre ambas variables, sin embargo la línea 31 Figura 6.1: Efecto de la temperatura sobre la resistencia del cobre.[4] Tabla 6.7: Resistencias en el estator de la máquina una vez operada Rux Rvy Rzw Rpromedio 1569mΩ 1354,5mΩ 1316,8mΩ 1413,4mΩ entrecortada puede ser considerada como una aproximación válida, la cual corta el eje en -234.5 ◦ C. Por lo tanto, si se hace x igual a la distancia entre T1 y -234.5 ºC y y la distancia entre T2 y -234.5 ºC, por la propiedad de triángulos semejantes se tiene la siguiente relación. y 234,5 + T1 234,5 + T2 x = ⇒ = R1 R2 R1 R2 Una vez operada la máquina de inducción en el laboratorio, se midió nuevamente las resistencias del estator para verificar su variación y la temperatura aproximada que alcanzó. Una vez promediadas las resistencias se puede determinar la temperatura del cobre cuando la máquina es operada considerando T1 = 23ºC. R2 234,5 + T2 1413,4 234,5 + T2 = ⇒ = 1,407 = ⇒ T2 = 127,78ºC R1 234,5 + T1 1004,6 234,5 + T1 Por lo tanto, las resistencias de la máquina se ven aumentadas aproximadamente en un 41 %. Rr0 = 2,028Ω 1,407 = 2,853Ω Re = 1004,6mΩ 1,407 = 1,413Ω 32 Tabla 6.8: Resistencias del estator y rotor en por unidad Rr 0.0327 Re 0.066 6.2.3. Pruebas de vacío y rotor bloqueado 6.2.3.1. Prueba de vacío La prueba de vacío se llevó a cabo a plena tensión con la máquina conectada en estrella, se adquirieron las formas de onda de las tensiones y las corrientes en el estator. Figura 6.2: Tensión en vacío Figura 6.3: Corriente en vacío 33 Con estas variables se determinó la potencia instantánea que se presenta en la siguiente figura. (a) (b) Potencia filtrada Figura 6.4: Potencia instantánea Bajo estás condiciones la máquina alcanzó una velocidad en el eje de 1795 rpm, lo que se traduce en un deslizamiento de 0.0028, lo cual indica que la máquina no se encontraba en una condición de vacío total, en vista de que este convertidor presentaba problemas en los rodamientos, esto tendrá sus implicaciones en el desarrollo de los resultados finales. Una vez procesadas las adquisiciones, se obtuvieron los siguientes valores. 34 Tabla 6.9: Variables de la operación en vacío 6.2.3.2. Vlnrms 1.039 Irms 0.834 P3ϕ 0.308 Q3ϕ 2.563 Zin 0.148+j1.236 Prueba de rotor bloqueado Se realizó la prueba hasta alcanzar la corriente efectiva nominal de la máquina. Figura 6.5: Tensión a rotor bloqueado 35 Figura 6.6: Corriente a rotor bloqueado Al igual que en la prueba de vacío, se determinó la potencia a partir de las variables medidas. 36 (a) (b) Potencia filtrada Figura 6.7: Potencia instantánea Tabla 6.10: Variables de la operación a rotor bloqueado Vlnrms 0.2237 Irms 1.5 P3ϕ 0.3864 Q3ϕ 0.9272 Zin 0.057+j0.1376 Se procede a determinar por el método clásico los parámetros del convertidor. 37 Figura 6.8: Circuito equivalente durante la prueba de rotor bloqueado [3] Mediante la prueba de rotor bloqueado se puede determinar la suma de la reactancia del estator y del rotor, despreciándose así la rama de magnetización. Xt = X1 + X2 = 0,9272/3 QRB = = 0,137 ⇒ X1 = 0,0687 2 IRB 1,52 A partir de la prueba de vacío, se determinan los parámetros de la rama magnetizante. 6.2.4. I02 X1 + V0 = Q0 ⇒ Xm = 1,19 Xm I02 R1 + V0 = P0 ⇒ Rm = 31,4 Rm Cálculo optimizado de los parámetros[1] En [1] se presenta un algoritmo que permite determinar los parámetros de la máquina a partir de distintos puntos de operación, incluyendo los de vacío y rotor bloqueado y partiendo de los parámetros obtenidos mediante el método clásico. Para aplicar dicho algoritmo, es necesario determinar la impedancia de entrada en varios puntos de operación, midiendo tensión y corriente a la entrada del convertidor. A partir del circuito equivalente de la máquina de inducción en vectores espaciales (régimen permanente) que se muestra en la figura 6.9, se puede determinar la impedancia de entrada teórica. Zin (Re , Lσe , Rr , Lσr , Rm , Lm , s) = Ze + Zr k Zm donde: (6.1) 38 Figura 6.9: Circuito equivalente de la máquina de inducción.[1] Ze = Re + jωLσe (6.2) Zr = Rr + jωLσr (6.3) Zm = Rm k jωLm = jωLm · Rm Rm + jωLm (6.4) El problema consiste en minimizarla función de coste cuadrática: ∗ n X Zecal (si ) − Zemed (si ) Zecal (si ) − Zemed (si ) Ψ= σi Zemed (si ) σi Zemed (si ) i=1 (6.5) con: Zemed (si )es la i-ésima impedancia medida en los ensayos para el deslizamiento Si Zecal (si ) es la i-ésima impedancia calculada del modelo para el deslizamiento Si σi es un factor de precisión de la medida i n es el número total de medidas realizadas Definida la función de costo de esta manera se implementa la función de matlab ’fminsearch’ para determinar los parámetros de la máquina a partir de las condiciones de vacío (s=0.003), rotor bloqueado (s=1) y un punto de operación cualquiera (s=0.014). [Zinmed ] = h 0,131 + j1,2359 0,057 + j0,136 0,4845 + j0,9803 i Los valores de las impedancias de entrada teóricos se calculan mediante las ecuaciones de la máquina según el modelo de la figura 6.9. El vector de arranque del algoritmo está 39 conformado por los valores de las reactancias de dispersión del estator y rotor, la reactancia y la resistencia de magnetización calculadas en el apartado 6.2.3 a partir de las pruebas de vacío y rotor bloqueado. [x0 ] = h Xe R m Xm X r i = h 0,0687 11 1,2 0,0687 i Los parámetros obtenidos de esta manera se presentan en la tabla 6.11. Tabla 6.11: Parámetros de la máquina. 6.3. Re 0.0324 Rr 0.066 Xe 0.0772 Xr 0.0772 Xm 1.2 Rm 11 Determinación de la curva de magnetización Mediante un transformador trifásico variable, se energizó el motor desde una tensión de 80 V efectivos en el estator hasta alcanzar una tensión de 280 V efectivos, como en los casos anteriores se registraron las formas de onda de las corrientes y las tensiones. Como se indicó en la sección 2.2, la curva de saturación se determina a partir de las curvas de histeresis de la máquina para cada nivel de tensión, dichas curvas se presentan a continuación. Nótese que el área que encierra la curva de histéresis es bastante grande lo que se traduce en grandes pérdidas debido a este fenómeno. 40 Figura 6.10: Curvas de histéresis A partir de las curvas de la Figura 6.10 se determinan los puntos correspondientes a la curva de saturación como el punto extremo de cada ciclo de histéresis, el cual está dado por el punto que posee mayor radio con respecto al origen. Figura 6.11: Determinación de los puntos extremos en el ciclo de histéresis 41 Figura 6.12: Curva de saturación resultante De esta manera, es posible caracterizar la saturación de un convertidor electromecánico, como se observa a continuación. Para la utilización en las simulaciones de la característica expuesta en la Figura7.1 se aproximará la misma por mínimos cuadrados. Para lograr un mejor ajuste se procesaron los datos por tramos. Tabla 6.12: Ecuaciones de los polinomios. Intervalo de ajuste Polinomio Correlación (R2 ) 0 ≤ λ ≤ 0,421 −1,0928λ2 + 1,1019λ 0.9982 0,421 ≤ λ ≤ 0,98 0,6371λ4 − 1,4896λ3 + 1,418λ2 − 0,2241λ + 0,204 0.9981 0,98 ≤ λ ≤ 1,579 2,6024λ4 − 10,596λ3 + 16,926λ2 − 11,778λ + 3,3913 0.999999 42 Figura 6.13: Aproximación polinómica por mínimos cuadrados de la curva de saturación CAPÍTULO 7 RESULTADOS 7.1. Curva de saturación Para comparar los modelos analizados en este trabajo se utiliza la curva de saturación de la máquina ensayada en el laboratorio. A dicha curva presentada en la figura 7.1 se ha linealizado en la zona de flujos bajos. En esta zona es difícil determinar con precisión el comportamiento de la curva en vista de que al momento de bajar mucho la tensión se pierde par y la máquina no es capaz de mantenerse cercana a la velocidad sincrónica. Esta curva posee una pendiente en la zona lineal de 2.2 y en la zona saturada de 0.12. 7.2. Comparación de los modelos Los distintos modelos que se contrastan en este trabajo presentan pocas variaciones en los enlaces de flujos en el estator en vista de que como se dijo en la sección 2.1, estos resultan Figura 7.1: Curva de saturación simplificada 44 de la integración de la tensión con la que se alimenta el motor. En estás simulaciones, la tensión efectiva en el estator es 1 pu por lo tanto el flujo pico es, como se observa en la √ Figura 7.2, de 2. (a) Modelo de los enlaces de flujo (b) Modelo en corrientes (c) Modelo αβ (d) Modelo en coordenadas primitivas Figura 7.2: Flujos en el estator de la máquina En el caso de las corrientes en el estator, el transitorio presenta, en los cuatro modelos, magnitudes alrededor de 7 pu lo cual se ajusta a la reactancia de dispersión total que posee la máquina (0.154 pu). Al observar esta corriente en régimen permanente, se puede notar que a pesar de que todos consideran la curva de magnetización, ninguno de los modelos en vectores espaciales refleja distorsión armónica. El modelo en coordendas αβ sí presenta distorsión armónica en las corrientes del estator, sin embargo, dichas corrientes son diferentes en cada fase lo cual no tiene sentido ya que la máquina de inducción considerada es simétrica, esto deja en evidencia que al considerar un fenómeno no lineal como la saturación no es válido el uso de transformaciones lineales al momento de modelar el convertidor. Por el 45 contrario, en el modelo en coordenadas primitivas Figura 7.4d, se presenta un alto grado de distorsión armónica que a diferencia del modelo descrito anteriormente las tres corrientes en el estator son iguales entre sí permitiendo, en este sentido, una representación coherente de la máquina de inducción. Sin embargo, se debe destacar que este modelo no tiene en cuenta las pérdidas por histéresis que al observar la Figura 6.10 se puede notar que son bastante altas ya que el área que encierra cada ciclo es considerablemente grande, básicamente lo que se ha considerado en este caso, es de alguna forma promediar dichas curvas de histéresis para determinar así la curva de saturación que define la característica magnética del núcleo del convertidor. Dichas pérdidas de histéresis pueden verse como carga para la máquina. En referencia a lo dicho en la sección 1.2.1 la histéresis rotatoria suma aún más pérdidas a la máquina en comparación con un transformador que no tiene piezas giratorias. Así mismo, al observar las corrientes en vacío (Figura 6.3) se puede notar desbalances y armónicas de alta frecuencia que también pueden ocasionar algún tipo de carga al convertidor electromecánico. 46 (a) Modelo de los enlaces de flujos (b) Modelo en corrientes (c) Modelo αβ (d) Modelo en coordenadas primitivas Figura 7.3: Corrientes en el estator 47 (a) Modelo de los enlaces de flujos (b) Modelo en corrientes (c) Modelo αβ (d) Modelo en coordenadas primitivas Figura 7.4: Corrientes en el estator (detalle) No obstante a lo dicho anteriormente, las corrientes del modelo desarrollado tienen cierta similitud con las corrientes en vacío de un transformador (figura 1.3) con la diferencia de que en medio periodo estas corrientes son simétricas al aumentar y disminuir el flujo cosa que en un transformadros real no pasa, ya que el fenómeno de la histéresis condiciona a que el comportamiento al aumentar el flujo sea diferente que al disminuirlo. Un estudio del contenido armónico de las corrientes obtenidas a partir del modelo en coordenadas primitivas se presenta en la figura 7.5. En este espectro armónico se puede apreciar que las corrientes contienen más de un 60 % de terceros armónicos con respecto a la fundamental. En la sección 1.3 se mencionó que en los transformadores conectados en delta, las corrientes de fase poseen terceros armónicos y se resaltaron las características de dichas corrientes, las cuales se corresponden con muchas de las características de las 48 corrientes determinadas con este modelo de la máquina de inducción. Figura 7.5: Espectro armónico de las corrientes del modelo en coordenadas primitivas. El modelo en coordenadas primitivas desarrollado está basado en tres tensiones trifásicas que alimentan las tres bobinas de la máquina, como consecuencia de esta excitación y bajo los principios electromecánicos ya descritos, circulan las corrientes correspondientes por cada bobina de la máquina y son éstas las que se determinan mediante las ecuaciones matriciales anteriormente explicadas. Para ser coherentes con los principios básicos de los sistemas trifásicos, se puede asumir que las bobinas de la máquina están en delta o en estrella con el neutro conectado para que puedan circular las corrientes que se presentaron en la figura 7.4d, ya que bajo estas configuraciones es posible que circulen corrientes de terceros armónicos como se observa en el espectro armónico de la figura 7.5. Como las tensiones utilizadas en la simulación del modelo son completamente balanceadas, estas corrientes son de naturaleza homopolar esto permite comparar los resultados con lo observado y explicado en la sección 1.3 en referencia a la figura 1.4. En este sentido, al momento de validar los resultados del modelo con las curvas experimentales, es necesario que las corrientes de dicho modelo estén libres de terceros armónicos en vista de que las corrientes medidas son de línea y el neutro nunca estuvo conectado, es decir, no es posible la circulación de corrientes homopolares. No obstante, como las tensiones que alimentaron a la máquina son reales lo que puede implicar un cierto desbalance en la alimentación, la circulación de terceros armónicos no queda completamente descartada, solo que de existir este orden armónico, no poseerá un desfasaje de un periodo completo en cada fase de la máquina. Resulta conveniente entonces asumir que la conexión del modelo es en delta por lo que las corrientes obtenidas mediante el modelo desarrollado son las corrientes dentro de la delta. Definida la máquina de tal manera es necesario determinar las corrientes que circulan por las líneas, las cuales 49 se pueden observar en la figura 7.6a. (a) Modelo en coordenadas primitivas. Corrientes de línea. (b) Adquisición en el laboratorio. Corrientes en vacío Figura 7.6: Corrientes absorbidas por la máquina Las corrientes presentadas en la figura 7.6 se asemejan en la forma aplanada de la cresta que en el modelo desarrollado es más pronunciado, sin embargo el desbalance en las corrientes medidas establece claras diferencias entre ambas corrientes. A nivel mecánico, los tres primeros modelos presentan básicamente la misma respuesta. La presencia de armónicos en la corriente provoca que el par eléctrico tenga mayor ruido en el modelo en coordenadas αβ y en el modelo en coordenadas primitivas. 50 (a) Modelo de los enlaces de flujos (b) Modelo en corrientes (c) Modelo αβ (d) Modelo en coordenadas primitivas Figura 7.7: Par eléctrico 51 (a) Modelo de los enlaces de flujos (b) Modelo en corrientes (c) Modelo αβ (d) Modelo en coordenadas primitivas Figura 7.8: Velocidad Ahora se simula una carga mecánica de la forma Tm = kω 2 con k = 1,9 con lo cual se alcanza un deslizamiento de 0.04. Las corrientes obtenidas en el modelo se presentan en la figura 7.9a las cuales presentan menor distorsión armónica que en la simulación en vacío, esto es un resultado coherente porque la contrafuerza electromotriz que se crea con la carga ayuda a contrarrestar la saturación de la máquina. Estas corrientes presentan cierta similitud con las corrientes medidas en el laboratorio, sin embargo, el desbalance en estas últimas crea claras diferencias entre el modelo matemático y los valores experimentales. 52 (a) Modelo en coordenadas primitivas (b) Adquisición en el laboratorio Figura 7.9: Corriente en el estator. Máquina cargada s = 0,04 CONCLUSIONES Y RECOMENDACIONES Conclusiones Modelar la saturación en la máquina de inducción es importante en diversos casos, en la mayoría de los modelos que se han desarrollado en vectores espaciales se logra amortiguar los transitorios con lo cual los resultados de dichos modelos se acercan a la realidad. Sin embargo, los mencionados modelos no presentan la saturación como un fenómeno que ha de distorsionar las corrientes como consecuencia de la orientación de los dipolos magnéticos en la medida en que aumenta el flujo de inducción. Mediante el modelo en coordenadas primitivas presentado en este trabajo es posible representar matemáticamente la variación de la permeanza del camino magnético. Este modelo permite obtener corrientes que presentan armónicos al considerar una característica magnética no lineal El modelo desarrollado en este trabajo no es del todo exacto en sus resultados ya que no considera las pérdidas no conservativas de la histéresis que harán que los resultados finales sean más ajustados a la respuesta experimental de la máquina de inducción estudiada. Otro elemento que afecta los resultados son las pérdidas por corrientes Foucault que no se han eliminado previamente de las variables medidas en el laboratorio y como se dijo en la sección 2.1, éstas ensanchan el ciclo de histéresis lo que se traduce en mayores pérdidas. El comportamiento de la máquina de inducción saturada es muy similar al comportamiento de un transformador trifásico operando en vacío, se introducen corrientes de tercer armónico cuando la conexión permite su circulación (delta o estrella con neutro conectado), este armónico hace que la corriente en el estator presente picos tal como se explicó en la sección 1.3. Una vez determinado este modelo es posible estudiar y determinar un control adecuado para una máquina de inducción alimentada por un convertidor puente asimétrico de manera tal que se regule la saturación a la que se ve sometida la máquina en operación con el mencionado convertidor de electrónica de potencia. En la respresentación de fenómenos no lineales como la saturación no es válido la utilización de transformaciones lineales como las utilizadas en el modelo en coordenadas αβ. Recomendaciones Las modificaciones en el modelo que incluyan el fenómeno de la histéresis del convertidor garantizarán que los resultados puedan ser validados con mayor precisión con los resultados 54 experimentales en vista de que dicho fenómeno puede ser considerado como una carga para la máquina y como se vio en la figura 7.9 el modelo se ajusta bastante bien a los resultados experimentales cuando es conectada una carga mecánica. Se recomienda implementar el modelo con un convertidor puente asimétrico como el descrito en el Apéndice G para estudiar el comportamiento de la máquina cuando se considera la saturación. REFERENCIAS BIBLIOGRÁFICAS [1] ALLER, J. 2008. Máquinas Eléctricas Rotativas: Introducción a la Teoría General. Universidad Simón Bolívar. Departamento de Conversión y Transporte de Energía. Editorial Equinoccio. Venezuela. [2] BUENO, A. 2000. Electrónica de Potencia: Aspectos Generales y Convertidores Electrónicos. Universidad Simón Bolívar. Departamento de Conversión y Transporte de Energía. Venezuela. [3] FRAILE MORA, J. 2003. Máquinas eléctricas. McGraw-Hill. España. [4] Pearson Educación. Disponible en internet: http://www.pearsoneducacion. net/boylestad/recursos/03-Anexo%2003%20063-100.pdf [5] Tang, N., Wu, H., Qiu, P. “A saturation model of induction machine by space vector”, 2001. Fuzhou University, China. [6] CHAPMAN, S. 2000. Máquinas eléctricas. Mc Graw Hill. Australia. [7] Cabello, A., et al. “Control directo de par del motor de inducción usando un convertidor puente asimétrico”, 2007. UNEXPO-USB, Caracas. [8] E. E. Staff - MIT. “Circuitos magnéticos y transformadores”, 1980. Editorial Reverté, Argentina. [9] BUTCHER, J. C. 2008. Numerical Methods for Ordinary Differential Equations. 2a edición. John Wiley & Sons Ltd, Londres. [10] VIOLA, A. , VIOLA, J. 2006. Ecuaciones diferenciales ordinarias. Universidad Simón Bolívar. Editorial Equinoccio. Venezuela. [11] Blas del Hoyo, Alfredo. 2005. “Modelización de la histéresis magnética y su aplicación al cálculo numérico en máquinas eléctricas”. Barcelona, España. [12] Martín, Mª Elena. 2006. “Aportación al modelado del motor trifásico de inducción con consideración de la saturación y el efecto de doble jaula”. Barcelona, España. Apéndice A VECTORES ESPACIALES A.1. Definición En el análisis de los sistemas eléctricos de potencia, es común la implementación de trasformaciones modales, tales como: componentes simétricas, Clark, Park, entre otros. En sistemas de potencia balanceados, conectados en estrella con el neutro aislado o en delta, la componente de secuencia cero es nula, y por tanto, puede ser despreciada. En estas condiciones, las componentes de secuencia positiva y negativa poseen un comportamiento similar, en especial, en sistemas simétricos; adicionalmente una es la compleja conjugada de la otra. A partir de este principio, la transformación de vectores espaciales puede ser definida como [?]: → − x ≡ r 2 h 4π 2π · 1 ej 3 ej 3 3 x (t) a i · xb (t) = xα + jxβ = x (t) · e jξ(t) xc (t) (A.1) q 2 El coeficiente es el factor necesario para mantener los valores de potencia, iguales 3 entre el sistema de coordenadas primitivas y el de vectores espaciales. En la Figura A.1, se presenta la interpretación gráfica de la transformación a vectores espaciales. 57 Figura A.1: Representación gráfica del vector espacial de un sistema trifásico [1]. A.2. Potencia Activa y Reactiva Instantánea En sistemas de potencia trifásicos, la potencia activa trifásica instantánea P (t), puede ser calculada por medio de la superposición de la potencia activa instantánea por cada una de las fases del sistema. P (t) = va (t) ia (t) + vb (t) ib (t) + vc (t) ic (t) (A.2) Por otra parte, la potencia aparente trifásica compleja S, puede ser escrita a partir de los fasores de tensión fase-neutro y corriente de línea, como: S = 3 · V · I∗ = P + jQ (A.3) Una expresión similar a la ecuación A.3, puede ser obtenida al utilizar vectores especiales: −−→ −−→ −−→ ∗ s (t) = v (t) · i (t) = P (t) + jQ (t) Donde: (A.4) 58 va (t) h i 2 2π 4π · 1 e j 3 e j 3 · vb (t) 3 vc (t) −−→ v (t) ≡ r −−→ ∗ i (t) ≡ r (A.5) 2 h 4π 2π · 1 ej 3 ej 3 3 i (t) a i · ib (t) ic (t) (A.6) Al sustituir las ecuaciones A.5 y A.6, en la ecuación A.4, se obtiene la expresión de potencia instantánea en coordenadas primitivas [2]: −−→ s (t) = P (t) + jQ (t) = [va (t) ia (t) + vb (t) ib (t) + vc (t) ic (t)] (A.7) √ +j 3 [vbc (t) ia (t) + vca (t) ib (t) + vab (t) ic (t)] 2 La potencia activa trifásica P (t) calculada a partir de la ecuación A.4, es válida en cualquier condición de operación, para sistemas de potencia de tres o cuatro hilos, para régimen transitorio y estado estacionario, condición de operación balanceada y desbalanceada; y ante formas de ondas sinusoidales o no sinusoidales. Por otra parte, la potencia reactiva trifásica Q (t) no coincide siempre con la definición clásica de la potencia reactiva, expresada en la ecuación A.3. Como caso especial, para un sistema trifásico sinusoidal balanceado, en estado estacionario, ambas potencias reactivas coinciden, ya que la tensiones y corrientes del sistema conservan su amplitud y diferencia de fases [2]. Una de las principales ventajas de la definición de la potencia a través de vectores espaciales, es la posibilidad utilizarla de para estimar el comportamiento de la máquina de inducción en régimen dinámico de operación. A.3. Interpretación Física Es posible obtener una interpretación física de la expresión de potencia instantánea (ecuación A.7), si se considera la relación existente entre la fuerza electromotriz (e) y la intensidad → − → − de campo eléctrico ( E ) por una parte y la intensidad de campo magnético ( H ) y la corriente (i) por otra. En este sentido, el producto vectorial de estas dos intensidades de campo en → − → − → − cada punto del espacio y el tiempo, define el vector de Pointing S = E × H . El vector de Pointing es un vector variable en el espacio y el tiempo; y representa el flujo de potencia transferida por unidad de área, debido a los campos electromagnéticos. Para 59 el caso de las máquinas eléctricas rotatorias, en el entre hierro de las mismas, el vector de Pointing en cada punto del espacio y del tiempo, tiene dos componentes: una en sentido axial y otra en sentido tangencial. La componente axial, determina la potencia activa transferida entre el estator y el rotor, mientras que la tangencial, representa la potencia que fluye en el entrehierro para mantener el campo electromagnético rotatorio [2]. → − Dado que la corriente (i), está relacionado con la intensidad de campo magnético ( H ) por la Ley de Ampère; y la fuerza electromotriz (e) está relacionada con la intensidad de campo → − eléctrico ( E ) por la Ley de Faraday. Es posible pensar, que la potencia activa instantánea (P (t)) está relacionada con la componente radial del vector de Pointing, y la potencia reactiva instantánea (Q (t)) con la componente tangencial de este vector [2]. Apéndice B MÉTODO DE EULER El Método de Euler o de la Recta Tangente, fue publicado por el matemático suizo L. Euler (1707-1783), en su trabajo de tres tomos: “Institutiones Calculi Integralis”, en los años 1768 a 1770. Este método permite conocer la solución aproximada de una ecuación diferencial ordinaria de primer orden, en forma numérica [9]. Considérese la siguiente ecuación diferencial ordinaria: dy = y 0 (x) = f (x, y) , dx y (x0 ) = y0 (B.1) La solución de la ecuación diferencial ordinaria B.1, puede ser aproximada numéricamente, según el Método de Euler, utilizando la siguiente fórmula general: yn+1 = yn + f (xn , yn ) · (xn+1 − xn ) (B.2) El procedimiento consiste en construir una curva poligonal en n pasos, trazando en cada punto (xn , yn ), una recta de pendiente f (xn , yn ). Dicha curva, representa la solución de la ecuación diferencial [10]. Conforme (xn+1 − xn ) → 0, la solución de la ecuación diferencial obtenida por el Método de Euler, representara con mayor precisión y exactitud la solución real del problema. Esto se debe a que, para variaciones pequeñas de x, la pendiente f (xn , yn ), no varía significativamente, y por lo tanto, esta puede ser empleada para estimar el siguiente valor de la curva de solución [10]. B.1. Modo Matricial Para un sistema de ecuaciones diferenciales ordinarias de primer orden, de soluciones: y1 , y2 , . . . yN . Un equivalente a la ecuación B.1, puede ser escrita en forma matricial, de la siguiente manera: 61 y10 y20 .. . 0 yN f1 (x, y1 , y2 , . . . yN ) f2 (x, y1 , y2 , . . . yN ) = .. . fN (x, y1 , y2 , . . . yN ) , y1 (x0 ) y2 (x0 ) .. . yN (x0 ) = y10 y20 .. . (B.3) yN 0 La aplicación de la fórmula general de Euler (ecuación B.2) a cada fila del sistema de ecuaciones diferenciales representado matricialmente en la ecuación B.3, permite obtener numéricamente en forma aproximada, las curvas y1 , y2 , . . . yN . Apéndice C PROGRAMA COMPUTACIONAL PARA EL MODELO DE LOS ENLACES DE FLUJOS Programa principal 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 % > > > > > > > > > > > > > > > > Modelo de los enlaces de flujo <<<<<<<<<<<<<<<<<<<<<<<< % > > > > > > > > > > > > > > > > > > > > > > > Programa rincipal <<<<<<<<<<<<<<<<<<<<<<<<<<<<<< clear all clc close all global vr Rr Rs Lsigr Lsigs Lm J pp PsiT tauT Mf Mi k Lm0 A % Se definen los parámetros de la máquina Lsigs =0.0772; % Inductancia de dispersión del estator Lsigr =0.0772; % Inductancia de dispersión del rotor Rr =0.066; % Resistencia del rotor Rs =0.0324; % Resistencia del estator Lm =1.2; % Inductancia de la rama de magnetización % La tensión en las bobinas del rotor es cero por estar cortocircuitado vr =0; pp =2; % Número de pares de polos de la máquina f =60; % Frecuencia nominal de operación ( Hz ) wb =2* pi * f ; % Frecuencia base de la máquina ( rad / s ) tb =1/ wb ; % Tiempo base H =1.5; % Constante de inercia J =2* H * wb / pp ; % Momento de inercia k =0; % Constante de carga y0 =[0 0 0]; % Vector de valores iniciales A =1; % Tensión efectiva en el estator en por unidad tsimul =0.5; % Tiempo de simulación %Parámetros de ajustes de la curva de magnetización Lm0 =2.2; % Inductancia en la zona lineal Lmsat =0.12; % Inductancia en la zona 63 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 PsiT =1.6; % Nivel de flujo donde empieza a saturar la curva fT =0.8; % Curvatura del codo de saturacion tauT = fT / PsiT * Lm0 / Lmsat ; Mf = 1/ Lmsat ; Mi = (1/ Lm0 - 1/ Lmsat *(.5 - atan ( tauT * PsiT ) / pi ) ) /(.5+ atan ( tauT * PsiT ) / pi ) ; % Se resuelve numéricamente las ecuaciones del modelo [t , sol ]= ode1 ( @fluxlinkageEC ,0 , tsimul / tb , y0 , pi () /120) ; % Se redefinen los resultados obtenidos lambs = sol (: ,1) ; lambr = sol (: ,2) ; wr = sol (: ,3) ; %Cálculo de las corrientes y flujo de magnetización en vectores espaciales m = size ( sol ) ; Isr = zeros ( m (1) ,2) ; % Vector de corrientes del estator y rotor Lmm = zeros ( m (1) ,1) ; % Vector de inductancias de magnetización imv = zeros ( m (1) ,1) ; % Vector de corrientes de magnetización Lambdamv = zeros ( m (1) ,1) ; % Vector de enlaces de flujo de magnetización Lmm (1 ,1) = Lm ; Te = zeros ( m (1) ,1) ; for k =1:1: m (1) LL =[ Lsigs + Lmm ( k ) , Lmm ( k ) ; Lmm ( k ) , Lsigr + Lmm ( k ) ]; %Matriz de inductancias Isr (k ,:) =( inv ( LL ) *[ lambs ( k ) ; lambr ( k ) ]) ; % Cálculo de corrientes imv ( k ) = Isr (k ,1) + Isr (k ,2) ; % Cálculo de corriente de magnetizción Lambdamv ( k ) = Lmm ( k ) * imv ( k ) ; % Cálculo de flujo de magnetización Lambdamm = abs ( Lambdamv ( k ) ) ; imm =( Mf - Mi ) / pi *( (( Lambdamm - PsiT ) .* atan ( tauT *( Lambdamm - PsiT ) ) - PsiT * atan ( tauT * PsiT ) ) + .5/ tauT *( log (1+( tauT * PsiT ) ^2) - log (1+ tauT ^2*( Lambdamm - PsiT ) .^2) ) ) + Lambdamm .*( Mf + Mi ) /2; imlin = inv ( Lm0 ) * Lambdamm ; if imm - imlin <1 e -4 Lmm ( k +1) = Lm0 ; else Lmm ( k +1) = Lambdamm / imm ; end Te ( k ) =(3/2) * Lmm ( k ) * imag ( Isr (k ,1) * conj ( Isr (k ,2) ) ) ; end % Transformación a variables de fase a = exp (1 i *2* pi /3) ; % Corrientes en el estator ia = sqrt (2/3) * real ( Isr (: ,1) ) ; ib = sqrt (2/3) * real (( Isr (: ,1) ) * a ^2) ; ic = -( ia + ib ) ; 64 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 % Flujos en el Estator lambsa = sqrt (2/3) * real ( lambs (:) ) ; lambsb = sqrt (2/3) * real (( lambs (:) ) * a ^2) ; lambsc = -( lambsa + lambsb ) ; % Flujos en el Rotor lambra = sqrt (2/3) * real ( lambr (:) ) ; lambrb = sqrt (2/3) * real (( lambr (:) ) * a ^2) ; lambrc = -( lambra + lambrb ) ; %> > > > > > > > > > > > > > > > > > > > Resultados obtenidos < < < < < < < < < < < < < < < < < < < < < < < < < < < < % Límites de figuras y1 =[0 0.5]; y2 =[0.35 0.4]; % Flujos en el estator figure (1) plot ( t * tb , lambsa , t * tb , lambsb , t * tb , lambsc , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Flujo ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) xlim ( y1 ) % Velocidad figure (2) plot ( t * tb , wr , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Velocidad ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) xlim ( y1 ) ylim ([0 1.2]) % Corrientes en el estator figure (3) plot ( t * tb , ia , t * tb , ib , t * tb , ic , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Corriente ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) xlim ( y1 ) % Corrientes en el rotor figure (4) plot ( t * tb , ii (: ,4) ,t * tb , ii (: ,5) ,t * tb , ii (: ,6) , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; 65 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Corriente ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) xlim ( y1 ) % Flujos en el rotor figure (5) plot ( t * tb , lambra , t * tb , lambrb , t * tb , lambrc , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Flujo ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) xlim ( y1 ) % Par eléctrico figure (6) plot ( t * tb , Te , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Par eléctrico ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) xlim ( y1 ) Función utilizada 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 function px = fluxlinkageEc (t , x ) global vr Rr Rs Lsigr Lsigs Lm J PsiT tauT Mf Mi k Lm0 A %Se renombran las variables del programa lambs = x (1) ; lambr = x (2) ; wr = x (3) ; %Se define el vector espacial de tensión vsa = A * sqrt (2) * sin ( t ) ; vsb = A * sqrt (2) * sin (t -2* pi /3) ; vsc = A * sqrt (2) * sin ( t +2* pi /3) ; a = exp (1 i *2* pi /3) ; vs = sqrt (2/3) *[1 a a ^2]*[ vsa ; vsb ; vsc ]; %Se calculan las corrientes de rotor y estator L =[ Lsigs + Lm , Lm ; Lm , Lsigr + Lm ]; lamb =[ lambs ; lambr ]; Ii = inv ( L ) * lamb ; %Se calculan los enlaces de flujos 66 18 19 20 21 22 23 24 25 26 27 28 29 30 A1 = vs - Rs * Ii (1) ; % Derivada del enlace de flujo del estator A2 = vr - Rr * Ii (2) +1 i * wr * lambr ; %Derivada del enlace de flujo del rotor %Ecuación de par Tm = k * wr ^2; Te =(3/2) * Lm * imag ( Ii (1) * conj ( Ii (2) ) ) ; A3 =( Te - Tm ) / J ; Lambdam = Lm * abs ( Ii (1) + Ii (2) ) ; %Derivada de las variables de estado px =[ A1 ; A2 ; A3 ]; %Se determina el valor de la inductancia asociada al flujo de %magnetización obtenido imsat = ( Mf - Mi ) / pi *( (( Lambdam - PsiT ) .* atan ( tauT *( Lambdam - PsiT ) ) PsiT * atan ( tauT * PsiT ) ) + .5/ tauT *( log (1+( tauT * PsiT ) ^2) - log (1+ tauT ^2*( Lambdam - PsiT ) .^2) ) ) + Lambdam .*( Mf + Mi ) /2; imlin = inv ( Lm0 ) * Lambdam ; 31 32 33 34 35 36 if imsat - imlin <1 e -4 Lm = Lm0 ; else Lm = Lambdam / imsat ; end Apéndice D PROGRAMA COMPUTACIONAL PARA EL MODELO EN CORRIENTES Programa principal 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 % > > > > > > > > > > > > > > > > Modelo de los enlaces de flujo <<<<<<<<<<<<<<<<<<<<<<<< % > > > > > > > > > > > > > > > > > > > > > > > Programa rincipal <<<<<<<<<<<<<<<<<<<<<<<<<<<<<< clear all clc global Rr Rs Lsigs Lsigr vr im J k PsiT tauT Mf Mi Lm0 pp A %Parámetros de la máquina Lsigs =0.0772; % Inductancia de dispersión del estator Lsigr =0.0772; % Inductancia d dispersión del rotor Rr =0.066; % Resistencia del rotor Rs =0.0324; % Resistencia del estator vr =0; %Tensión en las bobinas del rotor pp =2; % Número de pares de polor f =60; % Frecuencia eléctrica ( Hz ) wb =2* pi * f ; % Frecuencia base ( rad / s ) tb =1/ wb ; % Tiempo base ( s ) H =1; % Constante de inercia J =2* H * wb / pp ; % Momento de inercia k =0; % Constante de carga tsimul =0.5; % Tiempo de simulación y0 =[0 0 0 0 0]; % Vector de valores iniciales A =1; % Tensión efectiva ( pu ) %Parámetros de ajustes de la curva de magnetización Lm0 =2.2; % Inductancia en la zona lineal Lmsat =0.12; % Inductancia en la zona PsiT =1.6; % Nivel de flujo donde empieza a saturar la curva fT =0.8; % Curvatura del codo de saturacion tauT = fT / PsiT * Lm0 / Lmsat ; Mf = 1/ Lmsat ; 68 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 Mi = (1/ Lm0 - 1/ Lmsat *(.5 - atan ( tauT * PsiT ) / pi ) ) /(.5+ atan ( tauT * PsiT ) / pi ) ; % Se resuelve numéricamente las ecuaciones del modelo [ tc , sol ]= ode45 ( @currentmodelEc ,[0 tsimul / tb ] , y0 ) t = tc ; is = sol (: ,1) ; ir = sol (: ,3) ; irconj = sol (: ,4) ; wr = sol (: ,5) ; % Corrientes en cada fase del estator a = exp (1 i *2* pi /3) ; isa = sqrt (2/3) * real ( sol (: ,1) ) ; isb = sqrt (2/3) * real (( sol (: ,1) ) * a ^2) ; isc = -( isa + isb ) ; % Corrientes en cada fase del rotor ira = sqrt (2/3) * real ( ir ) ; irb = sqrt (2/3) * real (( ir ) * a ^2) ; irc = -( ira + irb ) ; %Cálculo de los flujos n = size ( sol ) ; lambm = zeros ( n (1) ,1) ; % Flujo de magnetización lambs = zeros ( n (1) ,1) ; % Flujo en el estator lambr = zeros ( n (1) ,1) ; % Flujo en el rotor im = zeros ( n (1) ,1) ; % Corriente de magnetización Te = zeros ( n (1) ,1) ; % Par eléctrico for k =1: n (1) imv =( ir ( k ) + is ( k ) ) ; im ( k ) = abs ( imv ) ; theta = angle ( imv ) ; lambdam = fsolve ( @ ( x ) im ( k ) -(( Mf - Mi ) / pi *( (( x - PsiT ) .* atan ( tauT *( x PsiT ) ) - PsiT * atan ( tauT * PsiT ) ) + .5/ tauT *( log (1+( tauT * PsiT ) ^2) log (1+ tauT ^2*( x - PsiT ) .^2) ) ) + x .*( Mf + Mi ) /2) ,0.05) ; %Determina si se encuentra en la zona lineal o en la saturada imsat = ( Mf - Mi ) / pi *( (( lambdam - PsiT ) .* atan ( tauT *( lambdam - PsiT ) ) - PsiT * atan ( tauT * PsiT ) ) + .5/ tauT *( log (1+( tauT * PsiT ) ^2) - log (1+ tauT ^2*( lambdam - PsiT ) .^2) ) ) + lambdam .*( Mf + Mi ) /2; imlin = inv ( Lm0 ) * lambdam ; %Se calcula la inductancia en estado estacionario y transitorio if imsat - imlin <1 e -4 Lms = Lm0 ; Lmt = feval ( @derivadaim , lambdam ) ; else Lms = lambdam / im ( k ) ; Lmt = feval ( @derivadaim , lambdam ) ; end 69 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 lambm ( k ) = Lms * imv ; lambs ( k ) = Lsigs * is ( k ) + lambm ( k ) ; lambr ( k ) = Lsigr * ir ( k ) + lambm ( k ) ; Te ( k ) =(3/2) * Lms * imag ( is ( k ) .* irconj ( k ) ) ; end %Flujos en cada fase %Estator lambsa = sqrt (2/3) * real ( lambs (:) ) ; lambsb = sqrt (2/3) * real (( lambs (:) ) * a ^2) ; lambsc = -( lambsa + lambsb ) ; %Rotor lambra = sqrt (2/3) * real ( lambr (:) ) ; lambrb = sqrt (2/3) * real (( lambr (:) ) * a ^2) ; lambrc = -( lambra + lambrb ) ; %> > > > > > > > > > > > > > > > > > > > Resultados obtenidos < < < < < < < < < < < < < < < < < < < < < < < < < < < % Flujos en el estator figure (1) plot ( t * tb , lambsa , t * tb , lambsb , t * tb , lambsc , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Flujos en el estator ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) % Velocidad figure (2) plot ( t * tb , wr , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Velocidad ( rad / s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) % Corrientes en el estator figure (3) plot ( t * tb , isa , t * tb , isb , t * tb , isc , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Corrientes en el estator ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) % Corrientes en el rotor figure (4) plot ( t * tb , ira , t * tb , irb , t * tb , irc , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Corrientes en el rotor ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ 70 112 113 114 115 116 117 118 119 120 121 122 123 124 125 Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) % Flujos en el rotor figure (5) plot ( t * tb , lambra , t * tb , lambrb , t * tb , lambrc , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Flujos en el rotor ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) % Par eléctrico figure (6) plot ( t * tb , Te , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Par eléctrico ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) Funciones utilizadas 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 function px = currentmodelEc (t , x ) global Rr Rs Lsigs Lsigr vr im J k PsiT tauT Mf Mi Lm0 pp A % Se renombran las variables de la función is = x (1) ; isconj = x (2) ; ir = x (3) ; irconj = x (4) ; palfa = x (5) ; % Se definen las tensiones en las bobinas del estator vsa = A * sqrt (2) * sin ( t ) ; vsb = A * sqrt (2) * sin (t -2* pi /3) ; vsc = A * sqrt (2) * sin ( t +2* pi /3) ; % Vector espacial de tensión en el estator a = exp (1 i *2* pi /3) ; vs = sqrt (2/3) *[1 a a ^2]*[ vsa ; vsb ; vsc ]; %Corriente de magnetización imv =( is + ir ) ; im = abs ( imv ) ; theta = angle ( imv ) ; %Cálculo del flujo de magnetización asociado a la corriente de %magnetización im lambdam = fsolve ( @ ( x ) im -(( Mf - Mi ) / pi *( (( x - PsiT ) .* atan ( tauT *( x - PsiT ) ) - PsiT * atan ( tauT * PsiT ) ) + .5/ tauT *( log (1+( tauT * PsiT ) ^2) - log (1+ tauT ^2*( x - PsiT ) .^2) ) ) + x .*( Mf + Mi ) /2) ,0.05) ; % Cálculo de la inductancia de magnetización transitoria y estacionaria 71 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 1 2 3 4 5 6 7 8 9 10 11 12 13 imsat = ( Mf - Mi ) / pi *( (( lambdam - PsiT ) .* atan ( tauT *( lambdam - PsiT ) ) PsiT * atan ( tauT * PsiT ) ) + .5/ tauT *( log (1+( tauT * PsiT ) ^2) - log (1+ tauT ^2*( lambdam - PsiT ) .^2) ) ) + lambdam .*( Mf + Mi ) /2; imlin = inv ( Lm0 ) * lambdam ; if imsat - imlin <1 e -4 Lms = Lm0 ; Lmt = feval ( @derivadaim , lambdam ) ; else Lms = lambdam / im ; Lmt = feval ( @derivadaim , lambdam ) ; end Lo =( Lmt + Lms ) /2; L2 =( Lmt - Lms ) /2; N =[ Rs 0 0 0;0 Rs 0 0; -1 i .* palfa * Lms 0 Rr -1 i .* palfa *( Lsigr + Lms ) 0;0 1 i .* palfa * Lms 0 1 i .* palfa *( Lsigr + Lms ) + Rr ]; M =[ Lsigs + Lo , L2 * exp (2*1 i .* theta ) , Lo , L2 * exp (2*1 i .* theta ) ; L2 * exp ( -2*1 i .* theta ) , Lsigs + Lo , L2 * exp ( -2*1 i .* theta ) , Lo ; Lo , L2 * exp (2*1 i .* theta ) , Lsigr + Lo , L2 * exp (2*1 i .* theta ) ; L2 * exp ( -2*1 i .* theta ) , Lo , L2 * exp ( -2*1 i .* theta ) , Lsigr + Lo ]; Minvr = inv ( M ) ; v =[ vs ; conj ( vs ) ; vr ; conj ( vr ) ]; %Vector de tensiones ii =[ is ; isconj ; ir ; irconj ]; % Vector de corrientes pisr = Minvr *( v - N * ii ) ; %Derivada de las corrientes Tm = k * palfa ^2; %Par mecánico Te =(3/2) * Lms * imag ( is .* irconj ) ; % Par eléctrico pw =( Te - Tm ) / J ; %Derivada de la velocidad px =[ pisr ; pw ]; % Derivada de las variables de estado end function df = derivadaim ( Lambdam ) % Esta función permite clacular la derivada de la corriente de % magnetización con respecto al flujo de dicha rama %Se utiliza la expresión arcotangente de la corriente de magnetización Lm0 =2.2; % Inductancia en la zona lineal Lmsat =0.12; % Inductancia en la zona PsiT =1.6; % Nivel de flujo donde empieza a saturar la curva fT =0.8; % Curvatura del codo de saturacion tauT = fT / PsiT * Lm0 / Lmsat ; Mf = 1/ Lmsat ; Mi = (1/ Lm0 - 1/ Lmsat *(.5 - atan ( tauT * PsiT ) / pi ) ) /(.5+ atan ( tauT * PsiT ) / pi ) ; % Finalmente se evalúa en la derivada con el valor de flujo df = inv (( Mf - Mi ) / pi *( atan ( tauT *( Lambdam - PsiT ) ) +( Lambdam - PsiT ) .* inv (1+( tauT *( Lambdam - PsiT ) ) ^2) .* tauT -.5/ tauT * inv (1+ tauT ^2*( Lambdam - PsiT ) .^2) *2* tauT ^2*( Lambdam - PsiT ) ) +( Mf + Mi ) /2) ; 72 14 end Apéndice E PROGRAMA COMPUTACIONAL PARA EL MODELO EN COORDENADAS αβ Programa Principal 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 % > > > > > > > > > > > > > > > > Modelo en coordenadas alfa - beta <<<<<<<<<<<<<<<<<<<<<<< % > > > > > > > > > > > > > > > > > > > > > > > Programa rincipal <<<<<<<<<<<<<<<<<<<<<<<<<<<<<< clc clear all global vr vra vrb vrc Lsigr Lsigs Lm Lsr R J K Lm0 Lmsat PsiT fT a tauT Mf Mi A vec_esp f1 % Transformada a vectores espaciales alfa = exp (1 j *2* pi /3) ; alfa2 = alfa * alfa ; vec_esp = sqrt (2/3) *[1 , alfa , alfa2 ]; A =1; %Amplitud de la tensión de entrada en pu vr =[0;0]; % Tensión en las bobinas del rotor f = sqrt (3) ; f1 = inv ( f ) ; f3 = sqrt (3/2) ; % Parámetros de la máquina Lsigs = f3 *0.0772; % Inductancia de dispersión del estator Lsigr = f3 *0.0772; % Inductancia de dispersión del rotor Lm =1.2; % Inductancia de magnetización Lsr = Lm ; Rralf =0.066; % Resistencia de la bobina alfa del rotor Rrbet =0.066; % Resistencia de la bobina beta del rotor Rsalf =0.0324; % Resistencia de la bobina alfa del estator Rsbet =0.0324; % Resistencia de la bobina beta del estator pp =2; % Número de pares de polos K =0; % Constante de carga f =60; % frecuencia ( Hz ) wb =2* pi * f ; % frecuncia base ( rad / s ) tb =1/ wb ; % Tiempo base ( s ) H =1; % Constante de inercia 74 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 J =2* H * wb / pp ; % Momento de inercia y0 =[0 ,0 ,0 ,0 ,0 ,0]; % Vector de valores iniciales tsimul =0.5; % Tiempo de simulación a = alfa ; %Parámetros de ajustes de la curva de magnetización Lm0 =2.2; % Inductancia en la zona lineal Lmsat =0.12; % Inductancia en la zona PsiT =1.6; % Nivel de flujo donde empieza a saturar la curva fT =0.8; % Curvatura del codo de saturacion tauT = fT / PsiT * Lm0 / Lmsat ; Mf = 1/ Lmsat ; Mi = (1/ Lm0 - 1/ Lmsat *(.5 - atan ( tauT * PsiT ) / pi ) ) /(.5+ atan ( tauT * PsiT ) / pi ) ; %Matriz resistencias R =[ Rsalf ,0 ,0 ,0;0 , Rsbet ,0 ,0;0 ,0 , Rralf ,0;0 ,0 ,0 , Rrbet ]; %Se resuelve numéricamente las ecuaciones del modelo [t , sol ]= ode1 ( @Modelo_Saturacion_alfaBeta ,0 , tsimul / tb , y0 , pi () /120) ; %Se renombran las variables n = size ( sol (: ,1) ) ; lambalfs = sol (: ,1) ; lambbets = sol (: ,2) ; lambalfr = sol (: ,3) ; lambbetr = sol (: ,4) ; theta = sol (: ,5) ; wr = sol (: ,6) ; %Se crean los vectores de flujo lambr_vec = lambalfr +1 i * lambbetr ; lambs_vec = lambalfs +1 i * lambbets ; % Cálculo de los flujos en cada fase del estator lambsa = sqrt (2/3) * real ( lambs_vec ) ; lambsb = sqrt (2/3) * real ( lambs_vec * a ^2) ; lambsc = -( lambsa + lambsb ) ; % Cálculo de los flujos en cada fase del rotor lambra = sqrt (2/3) * real ( lambr_vec ) ; lambrb = sqrt (2/3) * real ( lambr_vec * a ^2) ; lambrc = -( lambra + lambrb ) ; %Cálculo de las corrientes ii = zeros ( n (1) ,4) ; is_vec = zeros ( n (1) ,1) ; Te = zeros ( n (1) ,1) ; iabcs = zeros (3 , n (1) ) ; iabcr = zeros (3 , n (1) ) ; for k =1: n (1) Salfs = gradosaturacion2 ( f1 * abs ( lambalfs ( k ) ) ) ; Sbets = gradosaturacion2 ( f1 * abs ( lambbets ( k ) ) ) ; 75 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 Salfr = gradosaturacion2 ( f1 * abs ( lambalfr ( k ) ) ) ; Sbetr = gradosaturacion2 ( f1 * abs ( lambbetr ( k ) ) ) ; Lsat =[ Lsigs + Lm / Salfs ,0 ,2* inv ( Salfs + Salfr ) * Lsr * cos ( theta ( k ) ) , -2* inv ( Salfs + Sbetr ) * Lsr * sin ( theta ( k ) ) ; 0 , Lsigs + Lm / Sbets ,2* inv ( Sbets + Salfr ) * Lsr * sin ( theta ( k ) ) ,2* inv ( Sbets + Sbetr ) * Lsr * cos ( theta ( k ) ) ; 2* inv ( Salfs + Salfr ) * Lsr * cos ( theta ( k ) ) ,2* inv ( Sbets + Salfr ) * Lsr * sin ( theta ( k ) ) , Lsigr + Lm / Salfr ,0; -2* inv ( Salfs + Sbetr ) * Lsr * sin ( theta ( k ) ) ,2* inv ( Sbets + Sbetr ) * Lsr * cos ( theta ( k ) ) ,0 , Lsigr + Lm / Sbetr ]; lamb =[ lambalfs ( k ) ; lambbets ( k ) ; lambalfr ( k ) ; lambbetr ( k ) ]; ii (k ,:) = inv ( Lsat ) * lamb ; is_vec = ii (k ,1) +1 i * ii (k ,2) ; lambs_vec = lambalfs ( k ) +1 i * lambbets ( k ) ; Te ( k ) = - imag ( lambs_vec .* conj ( is_vec ) ) ; end % Corrientes de fase %Estator isa = sqrt (2/3) * ii (: ,1) ; isb = sqrt (2/3) * real (( ii (: ,1) +1 i * ii (: ,2) ) * a ^2) ; isc = -( isa + isb ) ; %Rotor ira = sqrt (2/3) * ii (: ,3) ; irb = sqrt (2/3) * real (( ii (: ,3) +1 i * ii (: ,4) ) * a ^2) ; irc = -( ira + irb ) ; y1 =[0 0.5]; y2 =[0.35 0.4]; %> > > > > > > > > > > > > > > > > > > > Resultados obtenidos < < < < < < < < < < < < < < < < < < < < < < < < < < < < % Flujos en el estator figure (1) plot ( t * tb , lambsa , t * tb , lambsb , t * tb , lambsc , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Flujo ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) % Velocidad figure (2) plot ( t * tb , wr , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Velocidad ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) % Corrientes en el estator figure (3) plot ( t * tb , isa , t * tb , isb , t * tb , isc , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Corriente ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) 76 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) % Corrientes en el rotor figure (4) plot ( t * tb , ira , t * tb , irb , t * tb , irc , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Corriente ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) % Flujos en el rotor figure (5) plot ( t * tb , lambra , t * tb , lambrb , t * tb , lambrc , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Flujo ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) % Par eléctrico figure (6) plot ( t * tb , Te , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Par eléctrico ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) Funciones utilizada 1 2 3 4 5 6 7 8 9 10 11 12 13 14 function px = M o d e l o _ S a t u r a c i o n _ a l f a B e t a (t , x ) global vr vra vrb vrc Lsigr Lsigs Lm Lsr R J K Lm0 Lmsat PsiT fT a tauT Mf Mi A vec_esp f1 % Se renombran las variables del programa lambalfs = x (1) ; lambbets = x (2) ; lambalfr = x (3) ; lambbetr = x (4) ; theta = x (5) ; wr = x (6) ; %Se define la tensión en el estator vsa = A * sqrt (2) * cos ( t ) ; vsb = A * sqrt (2) * cos (t -2* pi /3) ; vsc = A * sqrt (2) * cos ( t +2* pi /3) ; % Se crea la tensión en coordenadas alfa - beta 77 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 1 2 3 4 5 6 7 8 9 10 11 12 v_vec = vec_esp *[ vsa ; vsb ; vsc ]; valfa = real ( v_vec ) ; vBeta = imag ( v_vec ) ; vs =[ valfa ; vBeta ]; v =[ vs ; vr ]; % Se determinan los grados de saturación Salfs = gradosaturacion2 ( f1 * abs ( lambalfs ) ) ; Sbets = gradosaturacion2 ( f1 * abs ( lambbets ) ) ; Salfr = gradosaturacion2 ( f1 * abs ( lambalfr ) ) ; Sbetr = gradosaturacion2 ( f1 * abs ( lambbetr ) ) ; % Matriz de inductancias Lsat =[ Lsigs + Lm / Salfs ,0 ,2* inv ( Salfs + Salfr ) * Lsr * cos ( theta ) , -2* inv ( Salfs + Sbetr ) * Lsr * sin ( theta ) ; 0 , Lsigs + Lm / Sbets ,2* inv ( Sbets + Salfr ) * Lsr * sin ( theta ) ,2* inv ( Sbets + Sbetr ) * Lsr * cos ( theta ) ; 2* inv ( Salfs + Salfr ) * Lsr * cos ( theta ) ,2* inv ( Sbets + Salfr ) * Lsr * sin ( theta ) , Lsigr + Lm / Salfr ,0; -2* inv ( Salfs + Sbetr ) * Lsr * sin ( theta ) ,2* inv ( Sbets + Sbetr ) * Lsr * cos ( theta ) ,0 , Lsigr + Lm / Sbetr ]; lamb =[ lambalfs ; lambbets ; lambalfr ; lambbetr ]; % Flujos ii = Lsat \ lamb ; % Corrientes plamb =v - R * ii ; %Derivada del flujo is_vec = ii (1) +1 i * ii (2) ; lambs_vec = lamb (1) +1 i * lamb (2) ; Te = - imag ( lambs_vec .* conj ( is_vec ) ) ; % Par eléctrico Tm = K * wr ^2; % Par mecánico pwr =( Te - Tm ) / J ; % Derivada de la velocidad ptheta = wr ; % Derivada de la posición angular px =[ plamb ; ptheta ; pwr ]; % Derivada de las variables de estado end function s = gradosaturacion2 ( lambda ) %Esta función permite determinar el grado de saturación a partir del módulo %del flujo y las curvas de magnetización real y lineal global vr vra vrb vrc Lsigr Lsigs Lm Lsr J k I R Lm0 Lmsat PsiT fT a tauT Mf Mi A dca dcb dcc vec_esp imsat = ( Mf - Mi ) / pi *( (( lambda - PsiT ) .* atan ( tauT *( lambda - PsiT ) ) PsiT * atan ( tauT * PsiT ) ) + .5/ tauT *( log (1+( tauT * PsiT ) ^2) - log (1+ tauT ^2*( lambda - PsiT ) .^2) ) ) + lambda .*( Mf + Mi ) /2; imlin = inv ( Lm0 ) * lambda ; if abs ( imsat - imlin ) <1e -3 s =1; else s = imsat / imlin ; end end 78 Apéndice F PROGRAMA COMPUTACIONAL PARA EL MODELO EN COORDENADAS PRIMITIVAS Programa principal 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 %> > > > > > > > > > > > > > > Modelo de la máquina de inducción <<< <<<<< <<<<< < % %> > > > > > > > > > > > > > > Modelo en coordenadas primitivas < << << << < << << << < % %> > > > > > > > > > > > > > > > > > > > Programa Principal < < < < < < < < < < < < < < < < < < < < < < < < % clear all global vra vrb vrc Lsigr Lsigs Lm Lsr J K I R Lm0 PsiT fT tauT Mf Mi A vec_esp %Se define la transfromación a vectores espaciales alfa = exp (1 j *2* pi /3) ; alfa2 = alfa * alfa ; vec_esp = sqrt (2/3) *[1 , alfa , alfa2 ]; %Tensiones rotor vra =0; vrb =0; vrc =0; A =1; %Tensión efectiva en el estator en por unidad %Parámetros de la máquina Lsigs =0.0772; %Inductancia de dispersión del estator Lsigr =0.0772; %Inductancia de dispersión del rotor Lm =1.2; %Inductancia de magnetización Lsr = Lm ; Rr =0.066; %Resistencia de los devanados del rotor Rs =0.0324; %Resistencia de los devanados del estator pp =2; %Número de pares de polos K =0; %La constante de carga f =60; %Frecuencia eléctrica wb =2* pi * f ; %Frecuencia base tb =1/ wb ; %Tiempo base H =1; %Constante de inercia J =2* H * wb / pp ; %Momento de inercia y0 =[0 ,0 ,0 ,0 ,0 ,0 ,0 ,0]; %Vector inicial tsimul =0.5; %Tiempo de simulación %Definición de las matrices invariantes I = eye (3) ; %Matriz identidad R =[ Rs *I , zeros (3) ; zeros (3) , Rr * I ]; %Matriz de resistencias de la maquina %Parámetros de ajustes de la curva de magnetización Lm0 =2.2; %Inductancia en la zona lineal Lmsat =0.12; %Inductancia en la zona 80 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 PsiT =1.6; %Nivel de flujo donde empieza a saturar la curva fT =0.8; %Curvatura del codo de saturacion tauT = fT / PsiT * Lm0 / Lmsat ; Mf = 1/ Lmsat ; Mi = (1/ Lm0 - 1/ Lmsat *(.5 - atan ( tauT * PsiT ) / pi ) ) /(.5+ atan ( tauT * PsiT ) / pi ) ; %Se resuelve numéricamente las ecuaciones de la máquina [t , sol ]= ode1 ( @Modelo_Saturacion_Flujo ,0 , tsimul / tb , y0 , pi () /120) ; %Cálculo de las corrientes n = size ( sol ) ; ii = zeros ( n (1) ,6) ; Te = zeros ( n (1) ,1) ; for k =1:1: n (1) vsa = A * sqrt (2) * cos ( t ( k ) ) ; vsb = A * sqrt (2) * cos ( t ( k ) -2* pi /3) ; vsc = A * sqrt (2) * cos ( t ( k ) +2* pi /3) ; %Determinanción de los grados de saturación en cada fase del estator y el %rotor a partir de los enlaces de flujos Sas = gradosaturacion ( abs ( sol (k ,1) ) ) ; Sbs = gradosaturacion ( abs ( sol (k ,2) ) ) ; Scs = gradosaturacion ( abs ( sol (k ,3) ) ) ; Sar = gradosaturacion ( abs ( sol (k ,4) ) ) ; Sbr = gradosaturacion ( abs ( sol (k ,5) ) ) ; Scr = gradosaturacion ( abs ( sol (k ,6) ) ) ; %Modelo de la máquina th = sol (k ,8) ; %Matriz de cosenos Cn =[2* inv ( Sas + Sar ) * cos ( th ) , 2* inv ( Sas + Sbr ) * cos ( th +2* pi /3) , 2* inv ( Sas + Scr ) * cos ( th +4* pi /3) ; 2* inv ( Sbs + Sar ) * cos ( th +4* pi /3) , 2* inv ( Sbs + Sbr ) * cos ( th ) , 2* inv ( Sbs + Scr ) * cos ( th +2* pi /3) ; 2* inv ( Scs + Sar ) * cos ( th +2* pi /3) , 2* inv ( Scs + Sbr ) * cos ( th +4* pi /3) , 2* inv ( Scs + Scr ) * cos ( th ) ]; %Derivada de la matriz de cosenos dCn = -[2* inv ( Sas + Sar ) * sin ( th ) , 2* inv ( Sas + Sbr ) * sin ( th +2* pi /3) , 2* inv ( Sas + Scr ) * sin ( th +4* pi /3) ; 2* inv ( Sbs + Sar ) * sin ( th +4* pi /3) , 2* inv ( Sbs + Sbr ) * sin ( th ) , 2* inv ( Sbs + Scr ) * sin ( th +2* pi /3) ; 2* inv ( Scs + Sar ) * sin ( th +2* pi /3) , 2* inv ( Scs + Sbr ) * sin ( th +4* pi /3) , 2* inv ( Scs + Scr ) * sin ( th ) ]; %Matriz de inductancias de magnetización del estator y rotor Lms = Lm *[ inv ( Sas ) ,- inv ( Sas + Sbs ) ,- inv ( Sas + Scs ) ;... - inv ( Sas + Sbs ) , inv ( Sbs ) ,- inv ( Sbs + Scs ) ;... - inv ( Sas + Scs ) ,- inv ( Scs + Sbs ) , inv ( Scs ) ]; Lmr = Lm *[ inv ( Sar ) ,- inv ( Sar + Sbr ) ,- inv ( Sar + Scr ) ;... - inv ( Sar + Sbr ) , inv ( Sbr ) ,- inv ( Sbr + Scr ) ;... - inv ( Sar + Scs ) ,- inv ( Scr + Sbr ) , inv ( Scr ) ]; %Matriz de inductancias de la máquina L =[( Lsigs * I + Lms ) , Lsr * Cn ; Lsr * Cn . ’ ,( Lsigr * I + Lmr ) ]; %Matriz de par dL = Lsr *[ zeros (3) , dCn ; dCn . ’ , zeros (3) ]; %Flujos en el estator y rotor lambs =[ sol (k ,1) ; sol (k ,2) ; sol (k ,3) ]; lambr =[ sol (k ,4) ; sol (k ,5) ; sol (k ,6) ]; lambda =[ lambs ; lambr ]; %Tensiones en el estator y rotor vs =[ vsa ; vsb ; vsc ]; vr =[ vra ; vrb ; vrc ]; v =[ vs ; vr ]; 81 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 %Corrientes en el estator y rotor ii (k ,:) = inv ( L ) * lambda ; %Par eléctrico Te ( k ) =0.5* lambda . ’* inv ( L ) . ’* dL . ’* inv ( L ) * lambda ; end %Intervalo de gráficas y1 =[0 0.5]; %> > > > > > > > > > > > > > > > > > > > Resultados obtenidos < < < < < < < < < < < < < < < < < < < < < < < < < < < < < %Flujos en el estator figure (1) plot ( t * tb , sol (: ,1) ,t * tb , sol (: ,2) ,t * tb , sol (: ,3) , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Flujo ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) xlim ( y1 ) %Velocidad de la máquina en por unidad figure (2) plot ( t * tb , sol (: ,7) , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Velocidad ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) xlim ( y1 ) ylim ([0 1.2]) %Corrientes en el estator figure (3) plot ( t * tb , ii (: ,1) ,t * tb , ii (: ,2) ,t * tb , ii (: ,3) , ’ linewidth ’ ,1.5) ylim ([ -10.5 10.5]) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Corriente ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) xlim ( y1 ) %Corrientes en el rotor figure (4) plot ( t * tb , ii (: ,4) ,t * tb , ii (: ,5) ,t * tb , ii (: ,6) , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Corriente ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) xlim ( y1 ) %Flujos en el rotor figure (5) plot ( t * tb , sol (: ,4) ,t * tb , sol (: ,5) ,t * tb , sol (: ,6) , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) 82 136 ylabel ( ’ Flujo ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 legend ( ’ Fase a ’ , ’ Fase b ’ , ’ Fase c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) xlim ( y1 ) %Par eléctrico figure (6) plot ( t * tb , Te (:) , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Par eléctrico ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) xlim ( y1 ) %Corrientes de lineas figure (8) plot ( t * tb , ii (: ,1) - ii (: ,3) ,t * tb , ii (: ,2) - ii (: ,1) ,t * tb , ii (: ,3) - ii (: ,2) , ’ linewidth ’ ,1.5) set ( gca , ’ fontsize ’ ,12 , ’ fontweight ’ , ’ bold ’) ; grid xlabel ( ’ Tiempo ( s ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) ylabel ( ’ Corriente ( pu ) ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’) legend ( ’ I_l_a ’ , ’ I_l_b ’ , ’ I_l_c ’ , ’ FontSize ’ ,12 , ’ fontweight ’ , ’ bold ’ , ’ Location ’ , ’ SouthEast ’ , ’ Orientation ’ , ’ Horizontal ’) xlim ( y1 ) Funciones utilizadas 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 f u n c t i o n px=Modelo_Saturacion_Flujo ( t , x ) g l o b a l vr vra vrb v r c L s i g r L s i g s Lm Lsr J K I R Lm0 Lmsat PsiT fT a tauT Mf Mi A vec_esp %Se renombran l a s v a r i a b l e s para s e r empleadas d e n t r o de l a f u n c i ó n lambsa=x ( 1 ) ; lambsb=x ( 2 ) ; lambsc=x ( 3 ) ; lambra=x ( 4 ) ; lambrb=x ( 5 ) ; lambrc=x ( 6 ) ; wr=x ( 7 ) ; th=x ( 8 ) ; %Se d e f i n e l a t e n s i ó n en e l e s t a t o r vsa=A∗ s q r t ( 2 ) ∗ ( c o s ( t ) ) ; vsb=A∗ s q r t ( 2 ) ∗ ( c o s ( t −2∗ p i / 3 ) ) ; v s c=A∗ s q r t ( 2 ) ∗ ( c o s ( t +2∗ p i / 3 ) ) ; %Determinanción de l o s g r a d o s de s a t u r a c i ó n en cada f a s e d e l e s t a t o r y d e l %r o t o r Sas=g r a d o s a t u r a c i o n ( abs ( lambsa ) ) ; Sbs=g r a d o s a t u r a c i o n ( abs ( lambsb ) ) ; S c s=g r a d o s a t u r a c i o n ( abs ( lambsc ) ) ; Sar=g r a d o s a t u r a c i o n ( abs ( lambra ) ) ; Sbr=g r a d o s a t u r a c i o n ( abs ( lambrb ) ) ; S c r=g r a d o s a t u r a c i o n ( abs ( lambrc ) ) ; %Par mecánico 83 25 Tm=K∗wr ^ 2 ; 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 1 2 3 4 5 6 7 %Modelo de l a máquina %M a t r i z de c o s e n o s Cn=[2∗ i n v ( Sas+Sar ) ∗ c o s ( th ) , 2∗ i n v ( Sas+Sbr ) ∗ c o s ( th+2∗ p i / 3 ) , 2∗ i n v ( Sas+S c r ) ∗ c o s ( th +4∗ p i / 3 ) ; 2∗ i n v ( Sbs+Sar ) ∗ c o s ( th+4∗ p i / 3 ) , 2∗ i n v ( Sbs+Sbr ) ∗ c o s ( th ) , 2∗ i n v ( Sbs+S c r ) ∗ c o s ( th+2∗ p i / 3 ) ; 2∗ i n v ( S c s+Sar ) ∗ c o s ( th+2∗ p i / 3 ) , 2∗ i n v ( S c s+Sbr ) ∗ c o s ( th+4∗ p i / 3 ) , 2∗ i n v ( S c s+S c r ) ∗ c o s ( th ) ] ; %Deri vada de l a m a t r i z de c o s e n o s dCn=−[2∗ i n v ( Sas+Sar ) ∗ s i n ( th ) , 2∗ i n v ( Sas+Sbr ) ∗ s i n ( th+2∗ p i / 3 ) , 2∗ i n v ( Sas+S c r ) ∗ s i n ( th+4∗ p i / 3 ) ; 2∗ i n v ( Sbs+Sar ) ∗ s i n ( th+4∗ p i / 3 ) , 2∗ i n v ( Sbs+Sbr ) ∗ s i n ( th ) , 2∗ i n v ( Sbs+S c r ) ∗ s i n ( th+2∗ p i / 3 ) ; 2∗ i n v ( S c s+Sar ) ∗ s i n ( th+2∗ p i / 3 ) , 2∗ i n v ( S c s+Sbr ) ∗ s i n ( th+4∗ p i / 3 ) , 2∗ i n v ( S c s+S c r ) ∗ s i n ( th ) ] ; %M a t r i c e s de m a g n e t i z a c i ó n d e l e s t a t o r y d e l r o t o r Lms=Lm∗ [ i n v ( Sas ) ,− i n v ( Sas+Sbs ) ,− i n v ( Sas+S c s ) ; . . . −i n v ( Sas+Sbs ) , i n v ( Sbs ) ,− i n v ( Sbs+S c s ) ; . . . −i n v ( Sas+S c s ) ,− i n v ( S c s+Sbs ) , i n v ( S c s ) ] ; Lmr=Lm∗ [ i n v ( Sar ) ,− i n v ( Sar+Sbr ) ,− i n v ( Sar+S c r ) ; . . . −i n v ( Sar+Sbr ) , i n v ( Sbr ) ,− i n v ( Sbr+S c r ) ; . . . −i n v ( Sar+S c s ) ,− i n v ( S c r+Sbr ) , i n v ( S c r ) ] ; %M a t r i z de i n d u c t a n c i a s de l a máquina L=[( L s i g s ∗ I+Lms) , L s r ∗Cn ; L s r ∗Cn . ’ , ( L s i g r ∗ I+Lmr) ] ; %M a t r i z de par dL=L s r ∗ [ z e r o s ( 3 ) , dCn ; dCn . ’ , z e r o s ( 3 ) ] ; %F l u j o s en e l e s t a t o r y r o t o r lambs =[ lambsa ; lambsb ; lambsc ] ; lambr =[ lambra ; lambrb ; lambrc ] ; lambda =[ lambs ; lambr ] ; %C á l c u l o de c o r r i e n t e s en e l e s t a t o r y r o t o r i i =i n v (L) ∗ lambda ; %T e n s i o n e s en e l e s t a t o r y r o t o r vs =[ vsa ; vsb ; v s c ] ; vr =[ vra ; vrb ; v r c ] ; v=[ vs ; vr ] ; % Derivada de l o s e n l a c e s de f l u j o s dlamb=v−R∗ i i ; %C á l c u l o d e l par e l é c t r i c o Te=0.5∗ lambda . ’ ∗ i n v (L) . ’ ∗ dL . ’ ∗ i n v (L) ∗ lambda ; %Balance mecánico dw=(1/J ) ∗ ( Te−Tm) ; %Deri vada de l a p o s i c i ó n a n g u l a r dth=wr ; %D e r i v a d a s de l a s v a r i a b l e s a i n t e g r a r px=[dlamb ; dw ; dth ] ; end % >>>>>>>>>Funcion para e l c a l c u l o de l o s g r a d o s de s a t u r a c i o n <<<<<<<<<<<<< %Esta f u n c i ó n p e r m i t e c a l c u l a r e l g ra d o de s a t u r a c i ó n a p a r t i r de l a %e c u a c i ó n que d e f i n e l a c u r v a de m a g n e t i z a c i ó n c o n o c i d o e l e n l a c e de f l u j o f u n c t i o n s=g r a d o s a t u r a c i o n ( lambda ) g l o b a l vr vra vrb v r c L s i g r L s i g s Lm Lsr J K I R Lm0 PsiT fT a tauT Mf Mi A vec_esp %C á l c u l o de l a c o r r i e n t e s a t u r a d a a p a r t i r de l a e c u a c i ó n de l a c u r v a de %s a t u r a c i ó n 84 8 9 10 11 12 13 14 15 16 17 18 i m s a t = ( Mf−Mi ) / p i ∗ ( ( ( lambda−PsiT ) . ∗ atan ( tauT ∗ ( lambda−PsiT ) ) −PsiT ∗ atan ( tauT∗ PsiT ) ) + . 5 / tauT ∗ ( l o g (1+( tauT∗ PsiT ) ^2) − l o g (1+tauT ^2∗( lambda−PsiT ) . ^ 2 ) ) ) + lambda . ∗ ( Mf+Mi ) / 2 ; %C á l c u l o de l a c o r r i e n t e l i n e a l a p a r t i r de l a p e n d i e n t e en l a zona l i n e a l %de l a c u r v a de v a c í o i m l i n=i n v (Lm0) ∗ lambda ; %Determinación d e l g r a d o de s a t u r a c i ó n como e l c o c i e n t e de l a c o r r i e n t e %s a t u r a d a y l a c o r r i e n t e l i n e a l i f abs ( imsat−i m l i n )<1e−3 s =1; else s=i m s a t / i m l i n ; end Apéndice G PUENTE ASIMÉTRICO El puente asimétrico permite la operación del convertidor aún cuando una o varias de sus componentes fallan en la conmutación, evitando que la barra DC se vea cortocircuitada como es natural que suceda en un puente convencional ante condiciones de falla. G.1. Puente convencional y puente asimétrico El inversor trifásico de la G.1 permite la alimentación de carga entre los terminales a, b y c, mediante la conmutación de los transistores Q1 , Q2 , Q3 , Q4 , Q5 y Q6 . Para alimentar correctamente la carga es necesario que la activación de los transistores se haga en pares cruzados para garantizar que ni la fuente, ni la carga se cortocircuiten en un momento determinado, de esta manera, para alimentar las fases a y b los semiconductores Q1 y Q6 han de estar conduciendo y el resto apagado. Si Q1 y Q4 conducen al mismo tiempo, la fuente de corriente contínua se ve cortocircuitada. De igual manera al conducir simultaneamente Q1 y Q3 , la carga sufre cortocircuito. Para garantizar la correcta operación del puente se debe garantizar que los semiconductores de una misma rama deben ser uno el negado del otro. Uno de los principales inconvenientes de estos equipos es el fallo en la conmutación de los transistores que provoca cortocircuitos en la barra de corriente continua. Este inconveniente se puede solventar implementando un puente asimétrico como el que se presenta en la G.2. Figura G.1: Inversor trifásico convencional. [2] 86 Figura G.2: Inversor trifásico con puente asimétrico.[7] Dada la disposición de los semiconductores no es posible que se cortocircuite la fuente de corriente continua. G.2. Operación del puente asimétrico El inversor con puente asimétrico posee 27 estados de operación de los cuales solo 5 permiten tener una salida no nula de tensión. La operación de este inversor permite tener tres estados de tensión en la salida: tensión positiva cuando los transistores de una misma rama se encuentran encendidos, tensión negativa cuando los transistores contiguos se encuentran apagados y la corriente por la bobina es distinta de cero para que ésta provoque la conducción de los diodos correspondientes, y tensión cero cuando sólo uno de los transistores de una misma rama se encuentre encendido [7]. Resulta evidente que dependiendo del esquema de control del convertidor existe la posibilidad de tener inyecciones de corriente con valor DC distinto de cero ya que en un ciclo de operación la forma de onda a la que se someten las bobinas pueden no ser simétricas con respecto al eje de las abscisas. Esto en máquinas eléctricas se traduce en que el núcleo magnético se puede ver altamente saturado. G.3. Aplicaciones del puente asimétrico El puente asimétrico es comunmente usado en el accionamiento de los motores de reluctancia autoconmutados (SRM, sus siglas en inglés). Este dispositivo hizo su aparición en 1838, pero no es sino a principio del siglo XXI que es altamente apreciado por su construcción simple y robusta, bajos costos de fabricación, alta tolerancia a fallas y elevado rendimiento. El número de polos del estator debe ser distinto al número de polos del rotor para impedir la alineación completa del estator con el rotor. El alto número de posibilidades de control de este convertidor de electrónica de potencia representa una de las principales ventajas de su implementación.
 0
0
Anuncio
Documentos relacionados






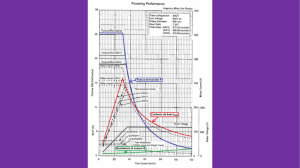
Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados