Análisis Espectral (Curso 2009/10)
Anuncio
")
Tratamiento Digital de Señales
11/12/2008
Departamento de Teoría de la Señal y
Communicaciones
Tratamiento Digital de Señales
Análisis espectral
Prof.: Manuel Blanco Velasco
Sumario
Introducción
Señales deterministas
¾ Señales estacionarias
¾ Señales no estacionarias
Señales
S ñ l aleatorias
l t i
¾ Análisis espectral no paramétrico
¾ Análisis espectral paramétrico
TDS-MBV
Manuel Blanco Velasco
2
1
Tratamiento Digital de Señales
11/12/2008
Análisis espectral
Consiste en determinar,
determinar en el dominio del tiempo discreto,
discreto
los contenidos espectrales de una señal de tiempo continuo.
Incluye la determinación del espectro de energía o de
potencia de la señal.
Si la señal de tiempo continuo xc(t) está razonablemente
limitada en banda, las características espectrales de su
equivalente en tiempo discreto x[n] proporcionan una
buena estimación de las propiedades espectrales de xc(t).
TDS-MBV
3
Análisis espectral: situación
En la mayoría de las ocasiones
ocasiones, xc(t) está definida
para -∞<t<∞, proporcionando una x[n] también
infinita, -∞<n<∞.
La evaluación de las propiedades espectrales de
una señal de longitud infinita resulta complicado.
Hay que adoptar distintos esquemas de análisis
dependiendo de la aplicación.
Hay que distinguir también entre señales
deterministas y señales aleatorias.
TDS-MBV
Manuel Blanco Velasco
4
2
Tratamiento Digital de Señales
11/12/2008
Sumario
Introducción
Señales deterministas
¾ Señales estacionarias
¾ Señales no estacionarias
Señales
S ñ l aleatorias
l t i
¾ Análisis espectral no paramétrico
¾ Análisis espectral paramétrico
TDS-MBV
5
Análisis frecuencial de señales
estacionarias
Las señales estacionarias
se caracterizan mediante su
∞
jΩ
DTFT: X ( e ) = ∑ x [ n ] e − jΩn
n =−∞
Dada la dificultad de analizar una señal de longitud
infinita, se somete a un procedimiento de enventanado:
donde: v [ n] = x [ n] ⋅ w [ n]
⎧ 1, 0 ≤ n ≤ N − 1
w[ n] = ⎨
resto
⎩0,
Ventana rectangular
Se espera que las características
espectrales de v[n] proporcionen
una estimación razonable del
espectro de x[n].
TDS-MBV
Manuel Blanco Velasco
6
3
Tratamiento Digital de Señales
11/12/2008
Esquema de análisis frecuencial
de señales estacionarias
El diagrama sobre el que se trabaja es este:
Se evalúa la DTFT V(ejΩ) del segmento finito v[n] en un
conjunto finito de M frecuencias equiespaciadas
mediante la DFT.
Para proporcionar resolución suficiente, se escoge un
valor de M mayor que la ventana (M> N)
TDS-MBV
7
Análisis frecuencial de señales
usando la DFT
La DFT de la señal v[n],
v[n] n = 00, …, N-1:
(
)
j ( 2π k M )
, 0 ≤ k ≤ M −1
⎪⎧V e
V [k ] = ⎨
resto
⎪⎩0
Las frecuencias correspondientes: Ω k = 2π k M
Y la equivalente
q
en tiempo
p continuo: ωk = 2π k MT
El efecto en el dominio transformado se interpreta por
medio de la convolución:
V ( e jΩ ) =
1
2π
(
θ
∫ π X ( e )W ( e
π
j
−
TDS-MBV
Manuel Blanco Velasco
j Ω−θ )
) dθ
8
4
Tratamiento Digital de Señales
11/12/2008
Suavizado del espectro
jΩ
X(e )
π
−π
2π
Ω
jΩ
W(e )
−π
π
Ω
jΩ
V(e ),V[k]
−π
0
π
2π
2π
M
TDS-MBV
Ω
9
Análisis de señales
sinusoidales
Considérese un tono de duración ilimitada: x [ n] = A0 cos Ω0 n
Se desarrolla el coseno: x [ n ] =
Su transformada de Fourier:
(
A0 jΩ0 n − jΩ0 n
e
+e
2
)
∞
X ( e jΩ ) = A0π ∑ δ ( Ω − Ω 0 − 2π l ) + δ ( Ω + Ω 0 − 2π l )
l =−∞
jΩ
X(e )
A0π
−π
Manuel Blanco Velasco
−Ω0
Ω0
π
Ω
TDS-MBV
10
5
Tratamiento Digital de Señales
11/12/2008
Señales sinusoidales de
duración finitas
Se considera el tono de duración finita:
v [ n ] = w [ n ] ⋅ A0 cos Ω 0 n =
=
Tomando transformadas:
V ( e jΩ ) =
A0
A
w [ n ] e jΩ0 n + 0 w [ n ] e − jΩ0 n
2
2
(
)
(
A0
A
j Ω−Ω
j Ω+Ω
W e ( 0) + 0 W e ( 0)
2
2
)
En el caso de una ventana rectangular:
W ( e jΩ ) = e
− jΩ
( N −1)
2
TDS-MBV
⎛ ΩN ⎞
sin ⎜
⎟
⎝ 2 ⎠
⎛Ω⎞
sin ⎜ ⎟
⎝2⎠
11
Espectro de la ventana
rectangular
DTFT de w[n]
N = 64
70
60
50
|W(F)|
40
30
20
10
0
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
F
TDS-MBV
Manuel Blanco Velasco
12
6
Tratamiento Digital de Señales
11/12/2008
Espectro de la señal sinusoidal
DTFT de v[n]=w[n]x[n]
35
2π
n
6
⎧ 1, 0 ≤ n ≤ N − 1
w[ n] = ⎨
resto
⎩0,
x [ n ] = cos
30
25
|V(F)|
20
15
Efectos del enventadado
10
1. Menor resolución
2. Fugas espectrales
5
0
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
F
F0 = 0.166
TDS-MBV
13
Espectro en decibelios
DTFT de v[n]=w[n]x[n]
40
x [ n ] = cos
30
2π
n
6
20
⎧ 1, 0 ≤ n ≤ N − 1
w[ n] = ⎨
resto
⎩0,
20 log10|V(F)|
10
0
-10
-20
F0 = 0.166
-30
-40
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
F
TDS-MBV
Manuel Blanco Velasco
14
7
Tratamiento Digital de Señales
11/12/2008
Diferentes ventanas
w[n] definida en el intervalo: 0 ≤ n ≤ N − 1
Bartlett
w [ n] = 1 −
Hanning
N −1
2
N −1
2 n−
⎛ 2π n ⎞
w [ n ] = 0.5 − 0.5cos ⎜
⎟
⎝ N −1 ⎠
Blackman
Hamming
⎛ 2π n ⎞
⎛ 4π n ⎞
w [ n ] = 0.42 − 0.5cos ⎜
⎟ + 0.08cos ⎜
⎟
⎝ N −1 ⎠
⎝ N −1 ⎠
⎛ 2π n ⎞
w [ n ] = 0.54 − 0.46 cos ⎜
⎟
⎝ N −1 ⎠
TDS-MBV
15
Forma de las ventanas
Hanning
1
0.8
0.8
0.6
0.6
w2[n]
w1[n]
Bartlett
1
0.4
0.2
0
0.4
0.2
0
200
400
600
800
0
1000
0
200
400
n
0.8
0.8
0.6
0.6
0.4
0.2
1000
800
1000
0.4
0.2
0
200
400
600
n
Manuel Blanco Velasco
800
Blackman
1
w4[n]
w3[n]
Hamming
1
0
600
n
800
1000
0
0
200
TDS-MBV
400
600
n
16
8
Tratamiento Digital de Señales
11/12/2008
Espectro de las ventanas (I)
Hanning
1
0.8
0.8
|W 2(F)|
|W1(F)|
Bartlett
1
0.6
0.4
0.2
0.6
0.4
0.2
0
-0.5
0
0
-0.5
0.5
0
1
1
0.8
0.8
0.6
0.4
0.2
N = 64
0.5
F
Blackman
|W 4(F)|
|W 3(F)|
F
Hamming
0.6
0.4
0.2
0
-0.5
0
0
-0.5
0.5
F
0
0.5
F
TDS-MBV
17
Espectro de las ventanas (II)
Hanning
0
-20
-20
20 log10|W2(F)|
20 log10|W1(F)|
Bartlett
0
-40
-60
-80
-100
0
0.1
0.2
0.3
0.4
-40
-60
-80
-100
0.5
0
0.1
0.2
F
0
-20
-20
-40
-60
-80
-100
0
0.1
0.2
0.3
F
Manuel Blanco Velasco
0.4
0.5
0.4
0.5
Blackman
0
20 log10|W4(F)|
20 log10|W3(F)|
Hamming
N = 64
0.3
F
0.4
0.5
-40
-60
-80
-100
0
0.1
TDS-MBV
0.2
0.3
F
18
9
Tratamiento Digital de Señales
11/12/2008
Anchura de la ventana
0
Blackman: N=32
Blackman: N=64
-10
-20
20 log10|W(F)|
-30
-40
-50
-60
-70
-80
-90
-100
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
F
TDS-MBV
19
Ventanas: datos
Tipo de Ventana
Anchura aproximada de
la región de transición
del lóbulo principal
Pico del lóbulo
secundario (dB)
Rectangular
4π/N
-13
Bartlett
8π/N
-25
Hanning
8π/N
-31
31
Hamming
8π/N
-41
Blackman
12π/N
-57
TDS-MBV
Manuel Blanco Velasco
20
10
Tratamiento Digital de Señales
11/12/2008
Efecto del enventanado:
ventana rectangular
v [ n] = w[ n] ( A0 cos Ω0n + A1 cos Ω1n)
A0=1
40
30
30
|V(F)|
|V(F)|
N = 64
40
20
10
0
A1=0,75
20
10
0
0.1
0.2
0.3
0.4
0
0.5
0
0.1
0.2
(a)
( )
(a)
Ω0=2π/6
2 /6 y Ω1=2π/3
2 /3
(b)
Ω0=2π/14 y Ω1=4π/15
0.3
0.4
0.5
0.3
0.4
0.5
(b)
30
40
25
(d)
Ω0=2π/14 y Ω1=4π/25
|V(F)|
Ω0=2π/14 y Ω1=2π/12
|V(F)|
(c)
30
20
15
20
10
10
5
0
0
0.1
0.2
0.3
0.4
0
0.5
0
0.1
0.2
(c)
(d)
TDS-MBV
21
Efecto del enventanado:
ventana Hamming
20
15
15
|V(F)|
|V(F)|
N = 64
20
10
5
0
10
5
0
0.1
0.2
0.3
0.4
0
0.5
0
0.1
0.2
(a)
0.3
0.4
0.5
0.3
0.4
0.5
(b)
15
20
15
|V(F)|
|V(F)|
10
10
5
5
0
0
0.1
0.2
0.3
0.4
0.5
0
0
0.1
(c)
(d)
TDS-MBV
Manuel Blanco Velasco
0.2
22
11
Tratamiento Digital de Señales
11/12/2008
600
500
500
400
400
300
200
200
100
100
0
0
0.1
0.2
0.3
0.4
0
0.5
0
0.1
0.2
(a)
0.3
0.4
0.5
|V(F)|
300
N = 1024
300
300
250
250
200
200
|V(F)|
600
|V(F)|
|V(F)|
Efecto del enventanado:
aumento de la longitud
150
100
(b)
100
50
600
600
500
500
400
400
0
150
50
0
0.1
0.2
0.3
0.4
0
0.5
0
0.1
0.2
|V(F)|
300
300
200
250
250
100
100
200
200
0
0.1
0.2
0.3
0.4
0.5
0
0
(c)
0.1
0.2
0.3
(d)
Rectangular
0.4
0.5
|V(F)|
300
0
150
100
0.4
0.5
0.3
0.4
0.5
150
100
50
0
0.3
(b)
200
300
|V(F)|
|V(F)|
(a)
50
0
0.1
0.2
0.3
0.4
0.5
0
0
0.1
0.2
(c)
(d)
Hamming
TDS-MBV
23
Análisis espectral de señales
no estacionarias
La DFT se emplea para el análisis espectral de
señales estacionarias: señales que pueden
expresarse adecuadamente como combinación
lineal de exponenciales de amplitud y fase fija,
invariantes en el tiempo e independientes de la
longitud de la señal.
Los ejemplos anteriores se refieren a casos
estacionarios
Si la señal no es estacionaria, no existe su DTFT.
TDS-MBV
Manuel Blanco Velasco
24
12
Tratamiento Digital de Señales
11/12/2008
Señales no estacionarias
Es el caso de la mayor parte de las señales: voz,
voz radar,
radar
señales biomédicas (ECG, EEG, …).
Ejemplo: x[n] = A cos ( Ω0 n 2 )
La pulsación instantánea crece linealmente: Ω0 n
1
Amplitu
litud
0.5
0
−0.5
−1
0
100
200
300
400
500
600
700
800
n
Ω0 = 10π ⋅10−5
Señal chirp
TDS-MBV
25
Características del análisis de
señales no estacionarias
Se requiere un análisis alternativo:
Segmentación de la señal en segmentos de corta duración: análisis
a corto plazo.
Cada segmento se procesa de forma separada.
Se suponen los parámetros aproximadamente constantes en
cada segmento.
Este análisis se basa en el supuesto de que si los segmentos
son suficientemente pequeños, se puede asumir la
estacionareidad en esas tramas de señal a efectos prácticos.
TDS-MBV
Manuel Blanco Velasco
26
13
Tratamiento Digital de Señales
11/12/2008
Componentes espectrales de
la señal chirp
DTFT de los 800 puntos de la señal chirp
10
Power Spectra
al Density (dB/ rad/sample)
0
-10
-20
-30
-40
-50
-60
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Normalized Frequency (×π rad/sample)
TDS-MBV
27
Diferente resultado para
señales más largas
1
Amplitud
0.5
0
-0.5
-1
0
200
400
600
800
1000
1200
1400
1600
Power Spectral Density (dB/ rad//sample)
n
10
0
-10
-20
-30
-40
-50
-60
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Normalized Frequency (×π rad/sample)
TDS-MBV
Manuel Blanco Velasco
28
14
Tratamiento Digital de Señales
11/12/2008
Segmentación
Amplitud
1
0.5
0
-0.5
-1
4 segmentos
0
100
200
300
400
0
-0.5
0
50
100
800
0
-0.5
250
300
350
400
750
800
n
1
0.5
0.5
0
-0.5
-1
400
700
0.5
-1
200
200
Amplitud
Amplitud
150
n
1
600
1
Amplitud
Amplitud
0.5
-1
500
n
1
450
500
550
0
-0.5
-1
600
600
650
n
700
n
TDS-MBV
29
Componentes chirp a corto
plazo
10
Primer segmento
Segundo segmento
Tercer segmento
Cuarto segmento
Power Specctral Density (dB/ rad/sample)
0
-10
-20
-30
-40
-50
-60
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Normalized Frequency (×π rad/sample)
TDS-MBV
Manuel Blanco Velasco
30
15
Tratamiento Digital de Señales
11/12/2008
Short-time Fourier Transform
(STFT)
La transformada localizada de Fourier se define como:
X STFT ( e jΩ , n ) =
∞
∑ x [ n − m] ⋅ w [ m] e
− jΩm
m =−∞
donde w[m] es la ventana elegida.
El objetivo de la ventana es extraer una porción finita de la señal
x[n] tal que las características sean aproximadamente
estacionarias.
Sii w[n]=1, la
l anterior
i definición
d fi i i se corresponde
d con la
l DTFT.
La STFT es un función de dos variables: n y Ω.
El módulo de la STFT se representa mediante el espectrograma:
diagrama bidimensional que representa el módulo en escala de
grises.
TDS-MBV
31
Espectrograma
2
−5
Espectrograma de x[n] = A cos ( Ω0 n ) , Ω0 = 10π ⋅10
1
Frequency
0.8
0.6
0.4
0.2
0
0
1000
2000
3000
4000
5000
Time
6000
TDS-MBV
Manuel Blanco Velasco
7000
8000
9000
32
16
Tratamiento Digital de Señales
11/12/2008
STFT: muestreo en frecuencia
En la práctica,
práctica la STFT se calcula en un conjunto finito
de valores de Ω.
X STFT [k , n] = X STFT ( e jΩ , n )
Ω= 2π k M
= X STFT ( e j 2π k M , n )
Muestreando en frecuencia y para una ventana finita
N −1
X STFT [k , n] = ∑ x [ n − m ] ⋅ w [ m] e − j 2π km M , 0 ≤ k ≤ M − 1
m=0
Esta expresión es reversible si M ≥ N
x [ n − m] =
1 M −1
∑ X STFT [ k , n] e j 2π km M , 0 ≤ m ≤ N − 1
Mw [ m ] k = 0
TDS-MBV
33
STFT: muestreo en el tiempo
Si se particulariza esta última expresión en un instante
concreto, por ejemplo en n = n0:
x [ n0 − m ] =
2π
j
km
1 M −1
M
,
, 0 ≤ m ≤ N −1
X
k
n
e
[
]
∑
0
STFT
Mw [ m ] k =0
Se recupera el segmento de señal comprendido en el
intervalo [n0, n0+N-1] a partir de X STFT [ k , n0 ]
Idénticamente, para n = n0+N, se recupera la señal en el
intervalo [n0+N, n0+2N-1] a partir de X STFT [ k , n0 + N ]
Se desprende que también se puede realizar un en el
dominio del tiempo.
TDS-MBV
Manuel Blanco Velasco
34
17
Tratamiento Digital de Señales
11/12/2008
1
0.5
0
STFT
−0.5
−1
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
La version muestreada de la STFT:
N −1
X STFT [k , lL] = ∑ x [lL − m ] ⋅ w [ m ] e− j 2π km M , 0 ≤ k ≤ M − 1 y − ∞ < l < ∞
m =0
Ω
XSTFT(ejΩ,4)
XSTFT(ejΩ,8)
XSTFT(ejΩ,12)
k
XSTFT[k,L]
XSTFT[k,2L]
4
1
8
2
XSTFT[k,3L]
Ω
2π
2π
M-1
2π//M
M
0
0 1 2 3 4 5 6 7 8 9 10 11 12 n
2
1
0
0
0
0
TDS-MBV
12 n
3 l
35
Sumario
Introducción
Señales deterministas
¾ Señales estacionarias
¾ Señales no estacionarias
Señales
S ñ l aleatorias
l t i
¾ Análisis espectral no paramétrico
¾ Análisis espectral paramétrico
TDS-MBV
Manuel Blanco Velasco
36
18
Tratamiento Digital de Señales
11/12/2008
Análisis de señales aleatorias
Las señales aleatorias se caracterizan como procesos
estocásticos (procesos aleatorios) ya que:
Toda señal que transporta información tiene algún grado de
aleatoriedad de forma que en general no se puede predecir sin error
el valor que tomará en el futuro conocidos los valores que ha
tomado en el pasado.
Las señales siempre se mueven en entornos ruidosos lo que le
confiere un carácter aleatorio a las señales.
señales
Mediante un proceso aleatorio se trata de representar un
fenómeno que es estructuralmente similar para todo los
casos en los que se implementa pero cuya respuesta es
diferente en todas las realizaciones debido a su naturaleza
aleatoria.
TDS-MBV
37
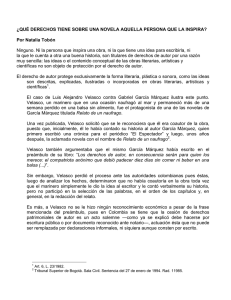
Ejemplo de señales aleatorias
Flujo respiratorio de ratas de laboratorio
0.5
Realización 1
x1(t)
0
-0.5
0
1
2
3
4
5
6
0
1
2
3
4
5
6
7
1
7
0.5
Realización 2
x2(t)
0
-0.5
Cada función representa
un animal.
Cada animal respira de
manera diferente aunque
existen similitudes:
1
Realización n
xn(t)
0.5
0
-0.5
0
1
2
t1
3
4
5
6
7
Existen pequeñas
diferencias en la
respiración de cada animal.
t2
TDS-MBV
Manuel Blanco Velasco
Esto sugiere que el proceso
subyacente es el mismo.
Los parámetros de cada
animal varían.
38
19
Tratamiento Digital de Señales
11/12/2008
Análisis espectral
Las señales aleatorias caracterizadas como procesos
estocásticos estacionarios no tienen energía finita y por tanto no
existe su DTFT.
Son señales definidas en términos de potencia.
Se caracterizan mediante la densidad espectral de potencia.
El análisis espectral se realiza en estos casos estimando la
densidad espectral de potencia.
potencia
Estudiamos dos tipos:
Análisis espectral no paramétrico.
Análisis espectral paramétrico.
Comenzamos con nociones de estadística.
TDS-MBV
39
Propiedades estadísticas
Sean x[0],
[ ], x[1],
[ ], …,, x[N-1]
[
] las muestras disponibles
p
de un pproceso
estocástico real.
El proceso aleatorio estará caracterizado si se conoce su función
densidad de probabilidad:
p ( x; θ ) = p ( x [ 0] , x [1] ,
, x [ N − 1] ; θ )
El vector columna x contiene las muestras de la observación en el
intervalo [0, N-1]:
⎡ x [ 0] ⎤
⎢
⎥
x [1] ⎥
x=⎢
⎢
⎥
⎢
⎥
⎣⎢ x [ N − 1]⎦⎥
Los parámetros del vector θ definen la forma de la función.
TDS-MBV
Manuel Blanco Velasco
40
20
Tratamiento Digital de Señales
11/12/2008
Distribución Gaussiana (I)
La fdp de un proceso Gaussiano x[n] se caracteriza
por su media:
mx [ n ] = E { x [ n ]}
Y su autocorrelación:
rx [ n1 , n2 ] = E { x [ n1 ] x [ n2 ]}
La autocorrelación rx[n1, n2] es simétrica:
rx [ n1 , n2 ] = rx [ n2 , n1 ]
TDS-MBV
41
Distribución Gaussiana (II)
Empleando notación matricial
m x = E {x}
R x = E {xxT }
⎡ x [ 0] ⎤
⎢
⎥
x [1] ⎥
T
⎢
⋅ ⎡ x [ 0] x [1]
xx =
⎢
⎥ ⎣
⎢
⎥
⎣⎢ x [ N − 1]⎦⎥
TDS-MBV
Manuel Blanco Velasco
x [ N − 1]⎤⎦
42
21
Tratamiento Digital de Señales
11/12/2008
Distribución Gaussiana (III)
⎡ x [ 0] x [ 0]
x [ 0] x [1]
⎢
x [1] x [ 0]
x [1] x [1]
xxT = ⎢
⎢
⎢
⎢⎣ x [ N − 1] x ( 0 ) x [ N − 1] x [1]
x [ 0] x [ N − 1] ⎤
⎥
x [1] x [ N − 1] ⎥
⎥
⎥
x [ N − 1] x [ N − 1]⎥⎦
⎡ rx [ 0,, 0]
rx [ 0,1
, ]
⎢
r [1, 0]
rx [1,1]
Rx = ⎢ x
⎢
⎢
⎢⎣ rx [ N − 1, 0] rx [ N − 1,1]
rx [ 0,, N − 1] ⎤
⎥
rx [1, N − 1] ⎥
⎥
⎥
rx [ N − 1, N − 1]⎥⎦
TDS-MBV
43
Distribución Gaussiana (IV)
La fdp Gaussiana multivariable:
p ( x) =
1
( 2π )
N
2
Cx
1
2
T
⎡ 1
⎤
exp ⎢ − ( x − m x ) C−x 1 ( x − m x ) ⎥
⎣ 2
⎦
donde Cx es la covarianza:
{
C x = E ( x − m x )( x − m x )
T
}=R
x
− m xmTx
La información esencial se encuentra en Rx.
TDS-MBV
Manuel Blanco Velasco
44
22
Tratamiento Digital de Señales
11/12/2008
Estacionareidad (I)
Un proceso aleatorio estacionario presenta propiedades
estadísticas invariantes en el tiempo.
Se considera estacionareidad en sentido amplio (SA).
x[n] es estacionario en SA si su media es constante :
mx [ n ] = mx
Y su autocorrelación r[n1,n
n2] depende únicamente de la
diferencia de tiempos k = n1-n2: rx [ n, n − k ] = rx [ k ]
rx [ k ] = E { x [ n ] x [ n − k ]}
TDS-MBV
45
Estacionareidad (II)
La matriz autocorrelación queda:
⎡ rx [ 0]
rx [ −1]
rx [ −2]
⎢
rx [ 0]
rx ( −1)
⎢ rx [1]
R x = ⎢ rx [ 2]
rx [1]
rx [ 0]
⎢
⎢
⎢ r [ N − 1] r [ N − 2] r [ N − 3]
x
x
⎣x
Matriz simétrica
Toeplitz
rx [ k ] = rx [ − k ]
TDS-MBV
Manuel Blanco Velasco
rx [ − N + 1] ⎤
⎥
rx [ − N + 2]⎥
rx [ − N + 3] ⎥
⎥
⎥
rx [ 0] ⎦⎥
46
23
Tratamiento Digital de Señales
11/12/2008
Estacionareidad (III)
La propiedad de estacionareidad es atractiva ya
que admite una interpretación espectral que aporta
una información más valiosa que la incluida en la
matriz de autocorrelación.
La densidad espectral de potencia se define como
l DTFT de
la
d la
l funcion
f i autocorrelación:
t
l ió
S x ( e jΩ ) =
∞
∑ r [k ] e
k =−∞
− j Ωk
x
TDS-MBV
47
Nota: estimación de
parámetros
Sea x una variable aleatoria ((VA)) y θ un estadístico de la misma.
Si la VA no está definida (fdp desconocida), hay que estimar el
parámetro.
El estimador se obtiene a partir de una observación x de N muestras:
θˆ = f ( x )
{}
{}
Si lim E θˆ = θ , el estimador es asintóticamente insesgado.
N →∞
El error cuadrático medio para un estimador insesgado coincide con su
varianza:
2
2
= E θˆ − θ
V θˆ = E θˆ − E θˆ
{}
Manuel Blanco Velasco
{}
El estimador es insesgado si: E θˆ = θ
El sesgo:
g b (θ ) = E θˆ − θ
{}
{(
{ }) }
{(
Si lim V θˆ = 0 , la estima es consistente.
N →∞
TDS-MBV
)}
48
24
Tratamiento Digital de Señales
11/12/2008
Métodos no paramétricos
No hacen ninguna suposición acerca de cómo se
generan los datos.
Los estimadores se basan por completo en un
registro finito de datos (observación).
La resolución en frecuencia es igual
g a la anchura
espectral de la ventana rectangular de longitud N,
en el mejor de los casos:
≈ 1 N a − 3dB
TDS-MBV
49
Análisis espectral no
paramétrico
Como se ha visto,
visto la densidad espectral de potencia
∞
(DEP):
jΩ
− j Ωk
Sx (e
) = ∑ r [k ] e
k =−∞
x
donde rx[k] es la autocorrelación.
El procedimiento que se sigue es:
1 Se estima la autocorrelación.
1.
autocorrelación
2. Se estima la DEP calculando la DTFT del estimador de rx[k].
Para hacer esto, en la práctica se dispone de un número
limitado de muestras: x [ n ] , 0 ≤ n ≤ N − 1
TDS-MBV
Manuel Blanco Velasco
50
25
Tratamiento Digital de Señales
11/12/2008
Estimador de la
autocorrelación (I)
Un estimador de la autocorrelación:
⎧1
⎪N
⎪
rˆx [ k ] = ⎨
⎪1
⎪⎩ N
N −1− k
∑ x [ n] x [ n + k ],
N −1
∑ x [ n] x [ n + k ],
1
N
N −1− k
∑
n=0
k <0
n= k
El estimador tiene sesgo:
g
E {rˆx [ k ]} =
k ≥0
n =0
E { x [ n ] x [ n + k ]} =
N −1− k
(N −k) r k
1
rx [ k ] ∑ 1 =
x[ ]
N
N
n =0
k ⎞
⎛
= ⎜1 − ⎟ rx [ k ]
⎝ N⎠
TDS-MBV
51
Estimador de la
autocorrelación (II)
rˆx [ k ] =
Se puede expresar como una convolución:
1
1
x [ k ] ∗ x [ −k ] =
N
N
∞
n =−∞
k>0
-k
n =−∞
x[n]
N-1
0
n
x[n+k]
N-1-k
0
N-1
⎧1
⎪N
⎪
n rˆ [ k ] = ⎨
x
⎪1
⎪⎩ N
N −1− k
∑ x [ n] x [ n + k ],
k ≥0
n=0
N −1
∑ x [ n] x [ n + k ],
k <0
n= k
n
n
0
|k|
N-1
TDS-MBV
Manuel Blanco Velasco
∞
k<0
x[n]
x[n+k]
1
∑ x [ n ] x [ k − n) ] = N ∑ x [ n ] x [ n + k ]
52
26
Tratamiento Digital de Señales
11/12/2008
Periodograma (I)
N −1
Método indirecto: Sˆx ( e jΩ ) =
∑
k =− ( N −1)
rˆx [ k ] e− jΩk
Tomando transformadas:
1
Sˆx ( e jΩ ) = TF {rˆx [ k ]} = TF { x [ k ] ∗ x [ −k ]}
N
( )
x [ −n ] ←⎯⎯→ X ( e )
DTFT
donde: x [ n ] ←⎯⎯
→ X e jΩ
Método directo:
jΩ
*
DTFT
2
1
1
Sˆx ( e jΩ ) =
X ( e jΩ ) =
N
N
N −1
∑ x [ n] e
2
− jΩn
n=0
TDS-MBV
53
Periodograma (II)
Se aplica mediante la FFT:
2
1
1
Sˆx [ k ] =
X [k ] =
N
N
N −1
∑ x [ n] e
−j
2
2π
kn
M
n =0
Hay que analizar las características de este estimador:
{
} ∑( ) E {rˆ [k ]} e
E Sˆx ( e jΩ ) =
N −1
k =− N −1
x
− j Ωk
=
⎛
k ⎞
− j Ωk
⎜1 − ⎟ rx [ k ] e
N⎠
k =−( N −1) ⎝
N −1
∑
⎧ ⎛
k ⎞
⎪ ⎜1 − ⎟ , − ( N − 1) ≤ k ≤ ( N − 1)
donde: wB [ k ] = ⎨ ⎝ N ⎠
⎪0,
k > ( N − 1)
⎩
TDS-MBV
Manuel Blanco Velasco
54
27
Tratamiento Digital de Señales
11/12/2008
Ventana simétrica de Bartlett
⎧ ⎛
k ⎞
⎪ ⎜1 − ⎟ , − ( N − 1) ≤ k ≤ ( N − 1)
wB [ k ] = ⎨ ⎝ N ⎠
⎪0,
k > ( N − 1)
⎩
k
wB[n]
|k|=0
wB[0] =1
|k|=1
wB[1] = 1- 1/N
|k| = 2
wB[2] = 1- 2/N
…
…
wB [ n ]
1/N
0
-(N-1)
wB[N-1] = 1/N
|k| = N-1
1
N-1
TDS-MBV
n
55
Propiedades del estimador (I)
El valor medio se puede expresar:
{
} ∑( ) w [ k ] r [k ] e
E Sˆx ( e jΩ ) =
N −1
k =− N −1
B
− jΩk
x
= TF {wB [ k ] ⋅ rx [ k ]}
En el dominio transformado:
{
}
1
E Sˆ x ( e jΩ ) =
S x ( e jΩ ) ∗ WB ( e jΩ ) ≠ S x ( e jΩ )
2π
La ventana triangular introduce una pérdida de resolución
y produce fugas espectrales.
TDS-MBV
Manuel Blanco Velasco
56
28
Tratamiento Digital de Señales
11/12/2008
Propiedades del estimador (II)
Aunque el estimador es asintóticamente insesgado:
{
}
lim E Sˆx ( e jΩ ) = S x ( e jΩ )
N →∞
no converge suavemente cuando N aumenta.
La varianza para un proceso Gaussiano:
⎡ sen ( ΩN ) ⎤
V Sˆx ( e jΩ ) ≈ S x ( e jΩ ) ⎢1 +
⎥
NsenΩ ⎦
⎣
{
}
No es consistente:
{
}
lim V Sˆ x ( e jΩ ) = S x2 ( e jΩ )
N →∞
TDS-MBV
57
Periodograma modificado
w[ n] , 0 ≤ n ≤ N − 1
Se aplica una ventana:
Operación implícita con la ventana rectangular.
Se emplean otras ventanas con lóbulos
secundarios menores: Hanning, Hamming,
Blackman y Kaiser.
Cambiar
C
bi de
d ventana puede
d suponer una pérdida
é did de
d
resolución.
No afecta a la varianza
TDS-MBV
Manuel Blanco Velasco
58
29
Tratamiento Digital de Señales
11/12/2008
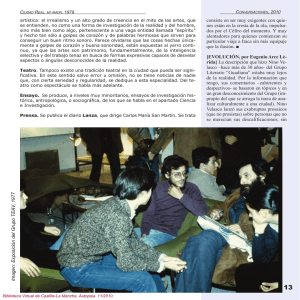
Promediado (I)
Se realiza una partición del segmento de señal en K
bloques: x [ n] = x [ n + iL ] , ⎧n = 0, , L − 1
⎨
⎩i = 0,
i
i=0
x[n]
, K −1
i = K-1
i=1
0
L-1 L
0
L-1
n
N-1
2L-1
x0[n]
n
x1[n]
n
0
Sin solapamiento:
Periodograma de Bartlett
L-1
xK-1[n]
TDS-MBV
n
0
L-1
59
Promediado (II)
1
K −1
Se promedian los periodogramas: Sˆx ( e jΩ ) = ∑ Sˆx ( e jΩ )
K i =0
Con segmentos incorrelados:
i
{
}
{
}
1
V Sˆx ( e jΩ ) = V S xi ( e jΩ )
K
Periodograma de Welch:
Sˆx ( e jΩ ) =
donde
U=
1
KLU
K −1 L −1
∑ ∑ xi [ n] w [ n] e− jΩn
i =0 n =0
1 L −1 2
∑ w [ n]
L n=0
TDS-MBV
Manuel Blanco Velasco
2
60
30
Tratamiento Digital de Señales
11/12/2008
Modelo estocástico lineal (I)
Los
os métodos
étodos pa
paramétricos
a ét cos se basa
basan een eel modelado
ode ado de laa
secuencia de datos x[n] como la respuesta de un LTI.
Si la entrada es un proceso aleatorio estacionario, la
salida también lo es.
La relación entre las DEP de entrada y salida:
v(n), V(z)
x(n), X(z)
H(z)
Sv(e )
jΩ
Sx(ejΩ)=|H(ejΩ)|2Sv(ejΩ)
Sv(z)
Sx(z)=H(z)H(z )Sv(z)
-1
DTFT
→ Sv ( e jΩ ) = σ v2
Para una entrada ruido blanco: rv [ k ] = σ v2δ [ k ] ←⎯⎯
El filtro caracteriza la DEP de la secuencia aleatoria.
TDS-MBV
61
Modelo estocástico lineal (II)
El modelo de media móvil autorregresivo
g
(ARMA:
(
Autoregressive
g
Moving Average) es la forma más general:
p
q
k =1
k =0
x [ n ] = −∑ ak x [ n − k ] + ∑ bk v [ n − k ]
Los parámetros ak, bk son fijos y v[n] es ruido blanco de varianza:
E {v 2 [ n ]} = σ v2 = rv [ 0 ]
q
bk z − k
∑
B( z)
k
=
0
En el dominio transformado: H ( z ) =
=
p
A( z)
1 + ∑ ak z − k
La densidad espectral de potencia:
S x ( z ) = H ( z ) H ( z −1 ) σ v2
k =1
S x ( e jΩ ) = H ( e jΩ ) σ v2
2
TDS-MBV
Manuel Blanco Velasco
62
31
Tratamiento Digital de Señales
11/12/2008
Modelo AR y MA
El modelo autorregresivo (AR) o todo polos se verifica
p
para q = 0 y b0 = 1:
x [ n ] + ∑ ak x [ n − k ] = v [ n ]
k =1
H ( z) =
1
=
A( z )
1
p
1 + ∑ ak z − k
k =1
El modelo de media móvil (MA) cuando A(z)=1:
q
x [ n ] = ∑ bk v [ n − k ]
k =0
q
H ( z ) = B ( z ) = ∑ bk z − k
k =0
TDS-MBV
63
Estimación de parámetros AR
El modelo AR es con mucho el más utilizado: 1) es
adecuado para representar picos estrechos y 2) las ecs.
lineales a que da lugar son simples.
Cualquier proceso ARMA o MA puede representarse
unívocamente mediante un modelo AR de orden infinito.
El modelo MA requiere
q
más coeficientes y el ARMA es el
de uso menos extendido.
Hay que estimar los ak, k = 1,…,p, y la varianza σv2:
TDS-MBV
Manuel Blanco Velasco
64
32
Tratamiento Digital de Señales
11/12/2008
Estimación de parámetros AR
El modelo
ode o está íntimamente
t a e te relacionando
e ac o a do con
co el
e modelo
ode o de
predicción lineal:
p
xˆ p [ n ] = −∑ ak x [ n − k ] =
k =1
= − a1 x [ n − 1] − a2 x [ n − 2] − … − a p x [ n − p ]
p muestras
x[n]
n-1 n
n-p
p+1 muestras
TDS-MBV
65
Predicción lineal
El error de predicción:
p
e p [ n ] = x [ n ] − xˆ p [ n ] = x [ n ] + ∑ ak x [ n − k ]
k =1
v(n )
x(n)
Por comparación: e p [ n] = v [ n]
El error de predicción puede interpretarse como la salida
p
de un FIR:
−k
Hp( z)=
1
x(n)
Ap ( z ) = ∑ ak z
k =0
Filtro de predicción: a0=1.
Ap( z)
Ap( z)
ep(n)
TDS-MBV
Manuel Blanco Velasco
66
33
Tratamiento Digital de Señales
11/12/2008
Filtro de predicción
El filtro de predicción A(z) se emplea como comodín para
la estimación de los parámetros.
Procedimiento: 1) se resuelve el problema de predicción, y
2) se sustituyen los ak estimados en el modelo AR.
Se puede minimizar la varianza del error de predicción:
σ e2 = E {e 2p [ n ]}
La varianza del ruido: σ v2 = σ e2
La DEP del modelo AR: S ( e jΩ ) =
σ v2
A ( e jΩ )
2
σ v2
=
p
1 + ∑ ak e
2
− jΩk
k =1
TDS-MBV
67
Nota: formas cuadráticas
TDS-MBV
Manuel Blanco Velasco
68
34
Tratamiento Digital de Señales
11/12/2008
Formas cuadráticas: desarrollo
Q = [ x1
⎡ a11 a12
⎢a
a22
xn ] ⋅ ⎢ 21
⎢
⎢
⎣ an1 an 2
x2
⎡ n
= ⎢ ∑ ai1 xi
⎣ i =1
n
∑a
i =1
n
n
i =1
i =1
x
i2 i
a1n ⎤ ⎡ x1 ⎤
a1n ⎥⎥ ⎢⎢ x2 ⎥⎥
⋅
=
⎥ ⎢ ⎥
⎥ ⎢ ⎥
ann ⎦ ⎣ xn ⎦
⎡ x1 ⎤
⎢ ⎥
n
⎤ ⎢ x2 ⎥
ain xi ⎥ ⋅
=
∑
i =1
⎦ ⎢ ⎥
⎢ ⎥
⎣ xn ⎦
n
n
n
= ∑ ai1 xi x1 + ∑ ai 2 xi x2 + … + ∑ ain xi xn = ∑∑ aij xi x j .
i =1
TDS-MBV
i =1 j =1
69
Formas cuadráticas:
polinomios
TDS-MBV
Manuel Blanco Velasco
70
35
Tratamiento Digital de Señales
11/12/2008
Reverso de una matriz
TDS-MBV
71
Gradiente de un vector
TDS-MBV
Manuel Blanco Velasco
72
36
Tratamiento Digital de Señales
11/12/2008
Error de predicción
p
El error de predicción: e p [ n ] = ∑ ak x [ n − k ] = aTp x p [ n ]
k =0
donde: ⎡ x [ n ] ⎤
⎢
⎥
x [ n − 1] ⎥
x p [n] = ⎢
⎢
⎥
⎢
⎥
⎣⎢ x [ n − p ]⎦⎥
a p = ⎡⎣1 a1
a p ⎤⎦
a2
T
La varianza del error: σ e2 = E {e 2p [ n ]} = E {aTp x p xTp a p } =
= aTp R x a p
Hay que asegurar a0=1: a p i = 1
T
0]
donde: i = [1 0
T
TDS-MBV
73
Minimización
Se minimiza el siguiente Lagrangiano respecto a ap:
Donde λ es el multiplicador de Lagrange. Se calcula el
gradiente:
Se multiplica por apT y despejando: aTp R xa p − λ = 0
λ = aTp R xa p = σ e2
Se obtienen las ecuaciones normales:
R xa p = σ e2 i
Ecuaciones de Yule-Walker
TDS-MBV
Manuel Blanco Velasco
74
37
Tratamiento Digital de Señales
11/12/2008
Ecuaciones normales (I)
En un proceso estacionario,
estacionario la matriz autocorrelación es
simétrica Toeplitz y: R x = R x
Desarrollando las ec. normales:
⎡ rx [ 0] rx [ −1]
rx [ −2]
⎢
rx [ 0]
rx [ −1]
⎢ rx [1]
⎢ rx [ 2]
rx [1]
rx [ 0]
⎢
⎢
⎢ r [ p ] r [ p − 1] r [ p − 2]
x
x
⎣x
rx [ − p ] ⎤ ⎡ 1 ⎤ ⎡σ e2 ⎤
⎥⎢ ⎥ ⎢ ⎥
rx [ − p + 1] ⎥ ⎢ a1 ⎥ ⎢ 0 ⎥
rx [ − p + 2]⎥ ⎢ a2 ⎥ = ⎢ 0 ⎥
⎥⎢ ⎥ ⎢ ⎥
⎥⎢ ⎥ ⎢ ⎥
rx [ 0] ⎦⎥ ⎣⎢ a p ⎦⎥ ⎢⎣ 0 ⎥⎦
TDS-MBV
75
Ecuaciones normales (II)
Da lugar a dos grupos de ecuaciones:
p
σ e2 = rx [ 0] + ∑ ak rx [ − k ], m = 0
k =1
p
rx [ m ] + ∑ ak rx [ m − k ] = 0, 1 ≤ m ≤ p
k =1
Se resuelve primero el segundo y se obtienen los ak:
rx [ −1]
⎡ a1 ⎤ ⎡ rx [ 0]
⎢a ⎥ ⎢
rx [ 0]
⎢ 2 ⎥ = ⎢ rx [1]
⎢ ⎥ ⎢
⎢ ⎥ ⎢
⎢⎣ a p ⎥⎦ ⎢⎣ rx [ p − 1] rx [ p − 2]
TDS-MBV
Manuel Blanco Velasco
rx [ − p + 1] ⎤
⎥
rx [ − p + 2]⎥
⎥
⎥
rx [ 0] ⎥⎦
−1
⎡ −rx [1] ⎤
⎢
⎥
⎢ −rx [ 2] ⎥
⎢
⎥
⎢
⎥
⎢⎣ −rx [ p ]⎥⎦
76
38
Tratamiento Digital de Señales
11/12/2008
Algoritmo de Levinson-Durbin
Ecs del algoritmo: γ j =
Ecs.
r Tj a j −1
σ e2
j −1
⎡ 0 ⎤
⎡a ⎤
a j = ⎢ j −1 ⎥ − γ j ⎢
⎥
⎣ 0 ⎦
⎣a j −1 ⎦
σ e2 = (1 − γ 2j ) σ e2
j −1
j
Para j = 1,…,
, , p, donde: r j = ⎡⎣ rx [1] rx [ 2]
Valores iniciales: a0 = 1
rx [ j + 1]⎤⎦
T
r0 = rx [1]
σ e2 = rx [ 0]
0
TDS-MBV
77
Estimación de Rx
El método ya presentado.
Xp de dimensión ( 2 N − 1) × N
La matriz de autocorrelación:
ˆ = 1 XT X
R
x
p
p
N
Matriz estimada cuadrada de
orden N. Se toman los
valores necesarios.
⎡ x [ 0]
0
⎢
x
1
x
[ 0]
⎢ []
⎢ x [ 2]
x [1]
⎢
x
3
x
[ 2]
⎢ [ ]
⎢
Xp =
⎢
⎢ x [ N − 1] x [ N − 2]
⎢ 0
x [ N − 1]
⎢
⎢
⎢
0
⎣ 0
TDS-MBV
Manuel Blanco Velasco
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎥
x [ 0] ⎥
x [1] ⎥
⎥
⎥
⎥
x [ N − 1]⎦
0
0
0
0
78
39
Tratamiento Digital de Señales
11/12/2008
Método de la autocorrelación
Se toman p+1 columas de Xp
Dimensión ( N + p ) × ( p + 1)
ˆ
Rx =
1
XTp X p
N−p
No es Toeplitz: no se puede
aplicar el algoritmo de
Levinson-Durbin.
⎡ x [ 0]
0
⎢
x
1
x
0]
[
]
[
⎢
⎢
⎢
x [ p − 1]
⎢ x [ p]
X p = ⎢ x [ p + 1]
x [ p]
⎢
⎢
⎢ x [ N − 1] x [ N − 2]
⎢
⎢
⎢
0
⎣ 0
⎤
⎥
⎥
⎥
⎥
x [ 0]
⎥
⎥
x [1]
⎥
⎥
x [ N − p − 1]⎥
⎥
⎥
⎥
x [ N − 1] ⎦
TDS-MBV
0
0
79
Método de la covarianza (I)
Se construye la matriz Xp sólo con los datos disponibles
Dimensión ( N − p ) × ( p + 1)
x[n]
(p+1) muestras
0
(N-p) muestras
p
1ª fila
N-1
N-p-1
2ª fila
TDS-MBV
Manuel Blanco Velasco
Última fila
80
40
Tratamiento Digital de Señales
11/12/2008
Método de la covarianza (II)
⎡ x [ p]
x [ p − 1]
⎢
x [ p]
⎢ x [ p + 1]
Xp = ⎢
⎢
⎢ x [ N − 2] x [ N − 3]
⎢ x [ N − 1] x [ N − 2]
⎣
ˆ
Rx =
x [ 0]
x [1]
⎤
⎥
⎥
⎥
⎥
x [ N − p − 2 ]⎥
x [ N − p − 1] ⎥⎦
1
XTp X p
N−p
TDS-MBV
Manuel Blanco Velasco
81
41