Servo motor de control
Anuncio

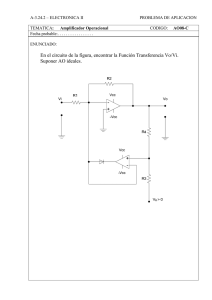
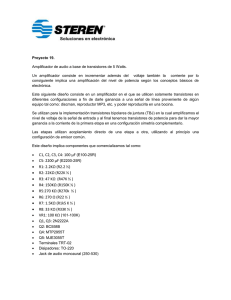
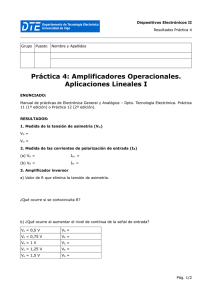
REPÚBLICA ARGENTINA COMISIÓN NACIONAL DE ENERGÍA ATÓMICA INFORME N.« 84 SERVO MOTOR DE CONTROL por Carlos Marazzi BUENOS AIRES 1963 SERVO MOTOR DE CONTROL Carlos Marazzi INTRODUCCIÓN Con la finalidad de ensayar circuitos de control se diseña un servomotor con un amplificador transistorizado. El ancho de banda es hasta 3 c/s pero el sistema responde hasta 10 c/s. El motor comienza a moverse con una señal mínima de 10 mV, El servomecanismo es capaz de entregar 400 mff. SISTEMA EN BLOCK En la Fig. 1 puede verse el diagrama en blocks del sistema. Figura 1 El principio de funcionamiento es el de un servo amplificador para registradores o multiplicadores analógicos, (1), (2), (3). Como consecuencia de una tensión x de entrada, el eje del_ motor girará un ángulo © , que es proporcional a x e inversamente proporcional a Eref; siendo Eref una tensión constante usada como referencia. De este modo, al ser el ángulo de giro proporcional a la magnitud de entrada, el servomotor se comporta como un regulador proporcional, o sea un regulador P ( 4 ) . No utilizándose el potenciómetro como elemento de realimentación, aplicada una tensión de entrada constante, el motor giraría en un sentido dado y no se detendría hasta que desapareciera la tensión de entrada. 0 sea, la respuesta sería integral y se comportaría como un regulador I. K En la Fig, 2 puede verse la respuesta idealizada en ambos casos para una entrada x constante a partir de t = 0 . t O t o t Figura 2 CIRCUITO DE ENTRADA Sste consiste en un chopper de estado salido (5), (6). En la Fig. 3 puede verse el principio de funcionamiento. Figura 3 Si a la entrada del circuito se aplica la tensión x, aparecerá entre los puntos A y B una tensión aproximadamente igual a x dada por el divisor de tensión formado por Ra'y la resistencia interna del transistor en el momento de no-conducción. Un instante después la señal rectangular aplicada a la base, hará conducir al transistor y el divisor estará ahora formado por Ha y la pequeña resistencia colector-emisor del transitor saturado. Así se tiene a la salida una tensión en forma rectangular, de amplitud x y frecuencia igual a la del generador de control. La resistencia Rb limita la corriente de base al valor deseado. Cuando la tensión x es igual a 0, entre emisor y colector habrá un pequeño potencial si el transistor está conduciendo, a causa del potencial de saturación entre emisor-colector. En ose instante circula por Re una corriente que provoca una caída de potencial de signo contrario a la anterior. Ajustando Rd se logra que la tensión en A sea 0 cuando el transistor está saturado. Figura 4 6 AMPLIFICADOR Está compuesto por un seguidor por emisor para desacoplar al chopper y tres etapas amplificadoras. Estas trabajan de tal nodo que con una señal de entrada de 50 mV los transistores conducen fuertemente o pasan a no conducir según sea el semipe_ ríodo positivo o negativo. Esta forma de funcionamiento mejora la respuesta del sistema, pues sobrepasando los 50 mV el motor se conecta con la energía máxima. En la líltima etapa se obtiene una señal rectan.gular de 40 V y 60 mA. La tensión aplicada al devanado DI está defasada 90° con respecto a la tensión aplicada en el devanado D2. Esto se lorra con un circuito RC que defasa la tensión que se utiliza para controlar al chopper. Esta tensión se obtiene al recortar con diodos Zener una tensión alternada de aproximadamente 150V. En la Fi£. 4 puede verse el circuito desarrollado. La ganancia de tensión del amplificador desde la entrada hasta la salida, reemplazando el devanado DI del motor por una resistencia, es 1.000. 7 BIBLIOGRAFÍA 1. Korn and Korn: Me. Graw Hill 1 9 5 6 . 2. S, Pifer: Analogue Computátion. Me. Graw Hill, 1 9 6 1 . 3. C.M.: Multiplicador Analógico. Informe CNEA. 4 . A. Leonhard:"Die Selbsttatige Regelur.g" Springer Verlag 1 9 5 7 . 5. I>. Beug, H. Raghar Eggers, AEG Mitteilungen, 8 / 9 , 1 9 6 0 . 6 . R.L. Bright and A.P. Kruper: Electronics, April, 1 9 5 5 . -