- Ninguna Categoria
Fraguío, María Sol. 2010 - Biblioteca Digital de la Facultad de
Anuncio
Estudio fluidodinámico de reactores multifásicos mediante técnicas de análisis no-invasivas Fraguío, María Sol 2010 Tesis Doctoral Facultad de Ciencias Exactas y Naturales Universidad de Buenos Aires www.digital.bl.fcen.uba.ar Contacto: [email protected] Este documento forma parte de la colección de tesis doctorales de la Biblioteca Central Dr. Luis Federico Leloir. Su utilización debe ser acompañada por la cita bibliográfica con reconocimiento de la fuente. This document is part of the doctoral theses collection of the Central Library Dr. Luis Federico Leloir. It should be used accompanied by the corresponding citation acknowledging the source. Fuente / source: Biblioteca Digital de la Facultad de Ciencias Exactas y Naturales - Universidad de Buenos Aires UNIVERSIDAD DE BUENOS AIRES Facultad de Ciencias Exactas y Naturales Departamento de Industrias ESTUDIO FLUIDODINÁMICO DE REACTORES MULTIFÁSICOS MEDIANTE TÉCNICAS DE ANÁLISIS NO - INVASIVAS Tesis presentada para optar al título de Doctor de la Universidad de Buenos Aires en el área Química Industrial María Sol Fraguío Directores de Tesis: Dra. Miryan C. Cassanello Fernández Dr. Héctor Somacal Consejero de Estudios: Dra. Miryan C. Cassanello Fernández Buenos Aires, 2010 ESTUDIO DE SISTEMAS MULTIFÁSICOS UTILIZANDO TÉCNICAS DE ANÁLISIS NO INVASIVAS Resumen Este trabajo presenta un estudio sobre algunos aspectos de la fluidodinámica de sistemas multifásicos utilizando técnicas que no perturban el movimiento de los fluidos y/o el sólido presentes. El objetivo es caracterizar y/o monitorear la fluidodinámica en sistemas de interés industrial, particularmente, columnas de burbujeo bifásicas y lechos fluidizados trifásicos. Para el estudio de los sistemas multifásicos involucrados en este trabajo se midieron y analizaron series temporales provenientes de experimentos de densitometría, de tomografía de emisión de partículas únicas, generalmente llamada ”Radioactive Particle Tracking” (RPT), y de fluctuaciones de presión. Se utilizaron técnicas estadísticas básicas y un test estadístico que permite tener en cuenta las características caóticas de los sistemas para determinar transiciones de régimen de flujo y/o monitorear un cambio brusco en la fluidodinámica del sistema. El análisis de las diversas series temporales registradas permitió proponer procedimientos de identificación de transiciones del régimen de flujo subyacente, habiéndose obtenido concordancia entre las predicciones que surgen del análisis de series temporales de distintas variables características. Asimismo, el análisis de series temporales durante una perturbación indica que es posible diagnosticar el inicio de la misma con un procedimiento similar al empleado para identificar transiciones de flujo. Por otra parte, además de haber implementado por primera vez la técnica de RPT en Argentina, se estudiaron exhaustivamente distintos aspectos de la misma y se exploró la posibilidad de utilizarla para obtener información en sistemas donde estén ocurriendo cambios en la fluidodinámica debido a una perturbación. Se cuantificaron por primera vez los errores en las determinaciones de posiciones y velocidades ”instantáneas” y se encontró que, para una columna de burbujeo con el sistema agua – aire, es posible utilizar una calibración realizada con la columna llena de líquido y sin circulación de gas para reconstruir las posiciones del trazador cuando la columna opera tanto en régimen homogéneo como heterogéneo. Palabras clave: columnas de burbujeo, lechos fluidizados trifásicos, Radioactive Particle Tracking, análisis de series temporales, teoría del caos, test de Diks. STUDY OF MULTIPHASE SYSTEMS USING NON INVASIVE TECHNIQUES OF ANALYSIS Abstract This work presents a study of some fluid dynamic features in multiphase systems using techniques that do not disturb the behavior of the fluids or solids, in order to characterize or monitor the fluid dynamic in usual industrial systems, such as bubble columns and three phase fluidized beds. For the study of the multiphase systems involved in this work, time series from experiments of densitometry, single particle emission tomography, commonly known as Radioactive Particle Tracking (RPT), and pressure fluctuations were measured and analized. Diferent basic statistic techniques and a statistical test that allows taking into account the chaotic behavior of the multiphase systems were used to classify flow regime transitions and monitor a change in the system fluid dynamics. Analysis of different characteristic variables time series allowed suggesting procedures for flow regime transition identification. Good agreement was found between the predictions arising from the application of the statistic test to the different time series. Likewise, a perturbation could be sucessfully diagnosed from a similar time series analysis. Besides implementing the RPT technique for the first time in Argentina, different aspects of the technique were further investigated. Moreover, application of the technique to obtain information from systems where hydrodynamic changes due to a perturbation are taking place was explored. Errors in the positions and instantaneous velocities determinations were quantified for the first time. For an air-water bubble column, it was found that the use of a calibration carried out in a different hydrodynamic condition does not increase the inherent error of the technique. Hence, doing the calibration in the column with liquid and no gas circulation allows reconstructing the tracer positions measured when the column is operated in the homogeneous and heterogeneous flow regimes. Key Words: bubble columns, three phase fluidized beds, Radioactive Particle Tracking, time series analysis, chaos theory, Diks´s test. Agradecimientos En principio quiero agradecer a mi directora de tesis, Dra. Miryan Cassanello, tanto por su generosidad en el traslado de conocimientos como por la confianza y libertad depositada para atravesar cada una de las etapas del camino que recorrimos a lo largo del trabajo de investigación que nos llevó a la escritura de esta tesis. Formarme a su lado ha sido, en todo sentido, invaluable para mi desarrollo profesional. Quiero agradecer también a mi codirector de tesis, Dr. Héctor Somacal. Su participación en este proyecto permitió expandir los objetivos iniciales del mismo y enriquecer tanto el trabajo experimental como mi formación conceptual. Agradezco también su apoyo y contensión para los momentos de finalización de escritura de esta tesis. Quiero agradecer especialmente a todas las personas que hicieron posible montar el laboratorio en el Centro Atómico Constituyentes para realizar los experimentos de RPT realizados en la Argentina. Además de la Dra. Cassanello y el Dr.Somacal, quiero agradecer al Dr. Daniel Hojman y la Dra. María Angélica Cardona por su activa participación durante muchos de los experimentos que se presentan en esta tesis. Asimismo, quiero expresar mi orgullo por haber podido participar del armado de este grupo de trabajo interdisciplinario de invaluable experiencia y conocimiento individual puestos al servicio de un desarrollo tecnológico único para nuestro país. Agradezco al Dr. Milorad Dudukovic por haberme brindado todos los medios a su alcance y por su generosidad y amabilidad durante mi estadía en el CREL. Me gustaría agradecer a los miembros del PINMATE, especialmente al Dr. Pablo Bonnelli por su siempre buena predisposición y a mi compañero Mauricio Maestri por la ayuda en tantos momentos. Agradezco el apoyo económico recibido del CONICET, Fundación YPF, IAEA y Comisión Fulbrigth por haber hecho posible el desarrollo de este trabajo. Dedicatorias Esta tesis está especialmente dedicada a Pablo y a Valentina, por acompañarme desde el principio en este proyecto, por haberme apoyado y acompañado en los momentos más difíciles y por todos los buenos momentos y experiencias que compartimos a lo largo del camino que concluye con la escritura de esta tesis. Quiero dedicársela también a mis padres, por haberme brindado muchas de las herramientas que me permitieron llegar hasta aquí y especialmente por haberme apoyado en el camino de mi vocación. ÍNDICE I. Introducción.……………………………………………………………………….….1 II. Revisión bibliográfica…………………...……………………………………………9 II.1. Reactores Multifásicos………..…………………………………………….9 II.1.1. Lechos Fluidizados Trifásicos…………………………………….9 II.1.2. Columnas de Burbujeo………..…………………………………12 II.2. Regímenes de Flujo………………………………………………………..14 II.3. Análisis de Series Temporales…………………………………………….22 III.3.1. Dinámica Simbólica…………………………………………….22 III.3.2. Teoría del Caos.…………………………………………..….…23 III.3.2.1. Test de Diks..………………………………….………27 II.4. Técnicas No Invasivas de Análisis………………………………………...39 II.4.1. Densitometría……………………………………………………41 II.4.2. RPT………………………………………………………………44 III. Parte experimental………………………………………………………………….67 III.1. Implementación del Equipo de Flujo Multifásico para el Desarrollo de Técnicas no Invasivas de Análisis……………………………………………...67 III.2. Densitometría………………………………………………………….….70 III.3. Radioactive Particle Tracking…………………………………………….74 III.3.1. Detectores y Electrónica Asociada……………………………..74 III.3.2. Preparación de los Trazadores………………………………….78 III.3.3. Experimentos de Calibración con Fuente de Sc………………..81 III.3.4. Experimentos de Calibración con Fuente de Au……………..…85 III.4. Experimentos de RPT en Lechos Fluidizados Trifásicos………………...97 III.5. Experimentos de RPT en Columnas de Burbujeo………………………..99 III.6. Mediciones de Fluctuaciones de Presión en Columnas de Burbujeo…...100 III.6.1. Clasificación de Regímenes de Flujo………………………….103 III.6.2. Perturbación en la Fluidodinámica por un Cambio en el Carácter Espumante del Líquido……………………….……………………….104 IV. Resultados y Análisis……………………………………………………………..105 IV.1. Densitometría……………………………………………………………105 IV.2. RPT……………………………………………………………………...129 IV.2.1. Experimentos de Calibración con Fuente de 46Sc…….………129 IV.2.2 Experimentos de Calibración con Fuente de 198Au……………153 IV.2.3. Experimentos Dinámico de RPT……………………………...181 IV.2.4. Efecto de Utilizar una Sola Calibración………………………188 IV.2.4.1. Fuente 46Sc……………………………………….….189 IV.2.4.2. Fuente 198Au…………………………………………198 IV.3. Dinámica Simbólica…………………………………………………….215 IV.3.1. Aplicación de Dinámica Simbólica a Series Temporales de una Coordenada de RPT…………………………………………………...215 IV.3.2. Aplicación de Dinámica Simbólica a Series Temporales de Cuentas de Fotones Registrados Durante un Experimento deRPT en una Columna de Burbujeo…………………………………………………219 IV.4. Test de Diks……………………………………………………………..222 IV.4.1. Aplicación del Test de Diks a Series Temporales de una Coordenada de RPT en Lechos Fluidizados Trifásicos. Clasificación de Régimen de Flujo……………………………………………………...222 IV.4.2. Aplicación del Estadístico S para el Diagnóstico de Régimen de Flujo en Columnas de Burbujeo a partir de Datos de RPT. Validación de Mediciones de Fluctuaciones de Presión……………………………...232 IV.4.3. Aplicación del Test de Diks para Predecir una Perturbación en la Fluidodinámica de una Columna de Burbujeo Debido al Cambio del Carácter Espumante del Líquido………………………………………256 V. Conclusiones……………………………………………………………………….261 V.1. Densitometría.…………………………………………..………………..262 V.2. RPT………………………………………………………………………263 V.2.1. Experimentos de Calibración con Fuente de 46Sc……………...264 V.2.2. Experimentos de Calibración con Fuente de 198Au………….....265 V.2.3. Experimento Dinámico de RPT…………………………….….267 V.2.4. Efecto de Utilizar una Sola Calibración………………………..267 V.2.4.1. Fuente 46Sc…………………………………..……….268 V.2.4.2. Fuente 198Au……………………………………….…268 V.3. Dinámica Simbólica…………………...…………………………………269 V.3.1. Aplicación de Dinámica Simbólica a Series Temporales de una Coordenada de RPT……………………………….…………………..270 V.3.2. Aplicación de Dinámica Simbólica a Series Temporales de Cuentas de Fotones Registrados Durante un Experimento de RPT en una Columna de Burbujeo…………………………………………………270 V.4. Test de Diks……………………………………………….……………..271 V.4.1. Aplicación del Test de Diks a Series Temporales de la Coordenada x de una Partícula Trazadora Determinada por RPT en Lechos Fluidizados Trifásicos. Clasificación de Régimen de Flujo…………...271 V.4.2. Aplicación del Estadístico S para el Diagnóstico de Régimen de Flujo en Columnas de Burbujeo a partir de Datos de RPT. Validación de Resultados Determinados con Mediciones de Fluctuaciones de Presión…………………………………………………………………272 V.4.3. Aplicación del Test de Diks para Predecir el Cambio del Carácter Espumante del Líquido en Columnas de Burbujeo……………………273 Apéndice A: Descripción de Algoritmos de Reconstrucción de RPT Utilizados…….275 Nomenclatura………………………………………………………………………….281 Bibliografía……………………………………………………………………………283 CAPITULO I Introducción Los reactores multifásicos son equipos donde se ponen en contacto por lo menos dos fases que pueden participar en la reacción, como reactivos o productos o como fases inerte (Gianetto y Silveston, 1986). Frecuentemente algunos reactivos son introducidos en fase líquida y otros en fase gaseosa. El sólido puede ser reactivo o producto, actuar como catalizador de la reacción facilitando la posterior separación, o haber sido introducido para mejorar la distribución del flujo y del calor en el reactor y el área de transferencia de masa. El reactor donde ocurre la tranformación química, bioquímica, electroquímica, etc., es siempre el corazón del proceso ya que su performance determina el número y tamaño de unidades de separación necesarias. Por lo tanto, su correcto diseño y operación determina la economía del proceso total (Dudukovic, 2010). Existe una gran capacidad instalada de reactores multifásicos a nivel mundial en diferentes industrias. Entre las unidades de mayor interés industrial se encuentran los tanques agitados, columnas de burbujeo bifásicas y trifásicas, reactores circulantes gas-sólido y líquidosólido, lechos fluidizados trifásicos y bifásicos (Dudukovic et al., 2002). En general, el diseño y escalado de los reactores multifásicos depende principalmente de tres factores (Fan, 1989): 1) Transferencia de calor y materia 2) Características del mezclado 3) Cinética de la reacción química Los dos primeros factores están íntimamente ligados a la fluidodinámica de estos reactores, aclarando que se llama también fluidodinámica al movimiento de los sólidos en suspensión o “fluidizados”. Por lo tanto, el correcto diseño y operación de los reactores multifásicos depende en gran medida del conocimiento de esta fluidodinámica 1 y de su influencia sobre la distribución de los fluidos y las características del transporte y mezclado de las fases. En los últimos años, se han hecho muchos avances en describir adecuadamente, en base a mecanismos, la cinética de los procesos, habiéndose logrado aplicar este conocimiento en la escala industrial. En contraste, la descripción del movimiento de las fases y fenómenos de mezclado en escala del reactor no ha progresado mucho, y las aplicaciones para diseño en escala industrial se encuentran a nivel de reactor ideal, asumiendo flujo pistón o mezclado perfecto, o la combinación de ambos (Dudukovic et al., 2002). Una mejor manera de abordar el problema del diseño de reactores multifásicos sería utilizar modelos fenomenológicos que capturen la esencia del movimiento de las fases. Los mismos pueden desarrollarse utilizando conjuntamente observaciones experimentales y cálculos de modelado de fluidodinámica computacional (CFD). Desafortunadamente, para flujo multifásico, los cálculos de CFD están aún sujetos a incertidumbre, especialmente porque no pueden utilizarse simulaciones numéricas directas para la simulación de reactores grandes, requiriéndose varias condiciones de clausura para las fuerzas de interacción y turbulencia entre fases. Por lo tanto, los resultados producidos por los códigos de CFD necesitan ser especialmente validados con medidas experimentales adecuadas. En los inicios de los 90 varios trabajos reportaron evidencia experimental de una fluidodinámica caótica en distintos tipos de reactores multifásicos. Los trabajos consistían especialmente en la aplicación de la teoría del caos para analizar series temporales de alguna variable medible en sistemas multifásicos. Así se logró diagnosticar y cuantificar características caóticas de la fluidodinámica de diferentes tipos de reactores multifásicos gas-sólido (fluidizados gas-sólido: Stringer, 1989; Daw et al., 1990; van den Bleek & Shoutten, 1993a, 1993b; Bai et al., 1999; circulating fluidized beds: Bai et al., 1997; Zijerveld et al., 1998; Ji et al., 2000; spouted beds: Cassanello et al., 1999), gas-líquido (slugging fluidized beds: Karamavruc & Clark, 1997; columnas de burbujeo: Mittoni et al., 1995; Nguyen et al., 1996; Ruzicka et al., 1997; Letzel et al., 1997; Cassanello et al., 2001; Lin et al., 2001; Chen et al., 2001; columnas de burbujeo con dos líquidos inmiscibles: Wang et al., 2010) y gas-líquidosólido (lecho fluidizado gas-sólido-líquido: Cassanello et al., 1995; Tsutsumi & 2 Kikuchi, 2000), contribuyendo a identificar en forma objetiva transiciones de régimen de flujo, analizar la influencia de una dinámica caótica sobre el escalado de reactores multifásicos gas-sólido y gas-líquido y analizar posibles relaciones entre los cuantificadores de caos y las caracteristicas del movimiento de las fases. Más recientemente, la teoría del caos también se ha aplicado para monitorear y controlar la calidad de la fluidodinámica de un reactor a fin de mejorar su performance (van Ommen et al., 2000; Villa et al., 2003; Chaplin G., 2005, Stienstra et al., 2005). Una de las mayores dificultades que se presentan para el estudio y caracterización de la fluidodinámica de reactores multifásicos se debe a que los sistemas son opacos y no es sencillo “ver” dentro de ellos con técnicas “no invasivas”, es decir que no perturben el comportamiento en el reactor durante las mediciones. En consecuencia, los métodos ópticos generalmente utilizados para estudiar movimiento de fases no son aplicables para estos sistemas. Las únicas técnicas adecuadas para lograr exhaustiva información del movimiento de las fases, especialmente en el caso de suspensiones concentradas y flujos altamente turbulentos, son aquellas que implican el uso de radiación de alta energía que puede atravesar el sistema y dar una señal medible. Dentro de los métodos que son capaces de proveer algo de información fluidodinámica de estos sistemas sin recurrir al uso de radiaciones ionizantes, una técnica muy utilizada ha sido la medición de fluctuaciones de presión. Las mismas pueden medirse fácilmente empleando transductores de presión muy sensibles ubicados generalmente en la pared de los reactores (van Ommen et al., 1999). De esta manera, se obtiene una medición muy rápida y económica representativa de los fenómenos que ocurren dentro del reactor. Estos fenómenos son muy complejos y la respuesta de los sensores de presión depende de las condiciones experimentales tales como propiedades de las partículas, geometría de los lechos, posición del sensor, velocidad superficial de los fluidos, etc. En distintos reactores multifásicos, las fluctuaciones de presión pueden surgir de diversas causas; por ejemplo, en lechos fluidizados gas–sólido, las mismas pueden deberse a fluctuaciones inducidas por burbujas locales, oscilaciones globales del lecho o propagación de ondas de presión originadas en otras zonas del reactor, como la superficie del lecho o el distribuidor (Hsiaotao, 2007). Por lo tanto, las fluctuaciones de presión proporcionan una medida global, representativa de las distintas escalas y son de naturaleza compleja. 3 En este contexto, el objetivo de esta tesis fue el estudio de reactores multifásicos de aplicación en la industria a fin de proporcionar herramientas de caracterización y monitoreo de la fluidodinámica de los mismos y así contribuir al desarrollo de modelos fenomenológicos que interpreten su fluidodinámica y a la predicción de problemas de funcionamiento. En particular, este objetivo se tradujo en el desarrollo de tecnologías de punta no invasivas para el estudio de reactores multifásicos de escala piloto y uso industrial no disponibles en el país hasta el momento. Simultáneamente, se desarrollaron procedimientos de análisis que permiten extraer información útil de estos sistemas, teniendo en cuenta las características de su dinámica, mediante el análisis de series temporales de alguna variable medible en los equipos de escala industrial. Se estudiaron dos tipos de reactores multifásicos de fundamental importancia en el desarrollo de diversas industrias: columnas de burbujeo y lechos fluidizados trifásicos. En particular, se utilizaron diferentes técnicas para tratar de diagnosticar transiciones de régimen de flujo en los distintos sistemas estudiados. Se implementaron dos técnicas que implican el uso de rayos gama, la primera es la técnica de Densitometría y la segunda es esencialmente una tomografía de emisión de partículas únicas, comunmente denominada “Seguimiento de una partícula radiactiva” o Radioactive Particle Tracking (RPT). La técnica de Densitometría se basa en la respuesta de detectores de centelleo (1 ó 2) ante la presencia de una fuente radiactiva externa que emite rayos gama, ubicada cerca del reactor en estudio. La técnica del “Seguimiento de una partícula radiactiva” o RPT consiste en disponer un arreglo de detectores de centelleo (8 - 32) ubicados alrededor del sistema multifásico en estudio. Los mismos se utilizan para seguir el movimiento de una partícula radiactiva que tiene las mismas características que la fase del sistema multifásico cuyo movimiento se quiere caracterizar (“trazador”). Los trazadores deben asemejarse a la fase que están representando en tamaño, densidad, forma y flotabilidad. Los mismos emiten rayos gama de alta energía que pueden atravesar largas distancias hasta donde se encuentran los detectores. La técnica provee trayectorias de la fase en estudio. La misma es capaz de caracterizar la fluidodinámica de sistemas multifásicos proveyendo velocidades y parámetros de turbulencia. Asimismo, la técnica admite diferentes formas de extraer información de la dinámica del sistema. Debido a la restricción que impone la 4 producción de un trazador adecuado, la técnica se utiliza hasta el momento sólo para seguir el movimiento de fases condensadas (sólidos o líquidos). A partir de las mediciones obtenidas mediante las técnicas implementadas durante esta tesis y utilizando datos de experimentos de RPT realizados por Larachi et al. (1996), Limtrakul (1996) y Degaleesan (1997), se realizaron distintos tipos de análisis utilizando los procedimientos desarrollados. Los experimentos de Densitometría permitieron proponer un método no invasivo para diagnosticar transiciones de régimen de flujo en columnas de burbujeo. A partir de las series temporales de fotones obtenidas por los detectores, se calcularon cuantificadores que caracterizan la función de densidad de probabilidades del número de cuentas, y el grado de apartamiento de las mismas de la distribución normal. Los mismos se utilizaron para diagnosticar la transición de régimen de flujo. Se establecieron las condiciones para las cuales el método es capaz de extraer mejor la información: la influencia de la energía de los radioisótopos, la frecuencia de muestreo y la ubicación relativa de la fuente con respecto a los detectores. La importancia de este análisis reside en que se propone un método no invasivo de fácil implementación a nivel piloto e industrial y que no requiere de la interrupción de la operación del reactor para determinar transiciones de régimen de flujo. La sección III.2 de esta tesis presenta los detalles experimentales y la sección IV.1 presenta los resultados y el análisis de los mismos. Buena parte del trabajo de esta tesis consistió en la implementación de la técnica de RPT. Este objetivo se logró gracias a la formación de un grupo de trabajo multidisciplinario que instaló un laboratorio en el Centro Atómico Constituyentes (CAC) de la Comisión Nacional de Energía Atómica (CNEA) donde se desarrollaron los experimentos de RPT. Como parte de esta tesis, se diseñó, implementó y se puso en marcha un equipo que permite hacer RPT en una columna de burbujeo o reactor fluidizado trifásico. Los detalles experimentales se explican en la sección III.3. La sección III.3.1 explica en detalle la electrónica necesaria para la adquisición de los datos de RPT. En las secciones III.3.2 y III.3.3 se explican los detalles de los experimentos de calibración estática y dinámica realizados para poner a prueba nuestra capacidad de reproducir la trayectoria y velocidad de una partícula radiactiva en movimiento utilizando diferentes fuentes radiactivas, diferentes configuraciones de detectores y 5 diferentes algoritmos de reconstrucción. Las secciones IV.2.1 y IV.2.2 muestran los resultados obtenidos. Dado los buenos resultados obtenidos en los experimentos de las secciones IV.2.1 y IV.2.2, se realizó un experimento donde se dejó libre una partícula radiactiva con las características del agua en un lecho bifásico. Los resultados obtenidos se muestran en la sección IV.2.3 y son ejemplificadores de parte de la información que puede extraerse de la técnica de RPT y que se utiliza para validación de códigos de CFD. Las secciones IV.2.4 y IV.2.5 exploran las capacidades de la técnica de RPT para poder emplearse en el estudio de procesos dinámicos o transientes en reactores multifásicos, aplicación no explorada para la técnica a la altura de la escritura de esta tesis. Por otro lado, se llevó a cabo el análisis de series temporales de trayectorias obtenidas a partir de experimentos de RPT en lechos fluidizados trifásicos (Larachi et al., 1996, Limtrakul 1996) y columnas de burbujeo (Degaleesan, 1997). En primer lugar, se realizó un análisis de dinámica simbólica aplicada a series temporales de la coordenada axial del movimiento del sólido en un lecho fluidizado trifásico para diagnosticar transiciones de régimen de flujo en el mismo. Los resultados se muestran en la sección IV.3.1. La misma metodología fue utilizada para obtener información sobre la dinámica de un trazador moviéndose libremente en una columna de burbujeo a partir de las series temporales de las cuentas obtenidas con cuatro detectores en fila. Los resultados se muestran en la sección IV.3.2. En el marco de explotar las características caóticas de los sistemas estudiados, se utilizó el test de Diks et al. (1996) para realizar monitoreo estático y dinámico de lechos fluidizados trifásicos y columnas de burbujeo. En la sección IV.4.1 se muestran los resultados de la aplicación del test de Diks a series temporales de una coordenada de RPT en lechos fluidizados trifásicos a fin de clasificar regímenes de flujo, analizando varias condiciones de operación. La sección IV.4.2 muestra los resultados de haber aplicado el test de Diks para el diagnóstico de régimen de flujo en columnas de burbujeo de distintos tamaños a partir de datos de RPT. Adicionalmente, se realizaron mediciones de fluctuaciones de presión en los mismos sistemas en los que se habían realizado experimentos de RPT, con el objetivo de validar mediciones de una técnica de 6 fácil y económica implementación en equipos de escala piloto, como la medición con sensores de presión, con una técnica tan poderosa y robusta como RPT. Por último, se utilizó el test de Diks para predecir un cambio repentino en el carácter espumante de un líquido en una columna de burbujeo a partir de series temporales de fluctuaciones de presión. Los detalles experimentales se explican en la sección III.6 y los resultados en la sección IV.4.3. Finalmente, el Capítulo V resume las principales conclusiones alcanzadas en este trabajo. 7 8 CAPITULO II Revisión bibliográfica II. 1. REACTORES MULTIFÁSICOS Los reactores multifásicos son equipos que contactan dos o más fases a fin de que ocurran reacciones químicas, bioquímicas, electroquímicas, etc. Es muy importante el estudio de estos equipos en forma no invasiva debido a la gran influencia de la dinámica del movimiento de las fases sobre la performance del equipo. Esta tesis está orientada al estudio de algunos de estos equipos mediante el desarrollo de técnicas y procedimientos de análisis no invasivos. A continuación se hará una revisión de la literatura pertinente a los equipos estudiados y técnicas y procedimientos empleados y desarrollados. II.1.1. LECHOS FLUIDIZADOS TRIFÁSICOS La fluidización es un método que contacta eficientemente partículas sólidas con fluidos. La operación en la cual partículas sólidas son fluidizadas por la fase líquida, con una velocidad de flujo por encima de la velocidad mínima de fluidización y con una concentración de partículas sólidas uniforme se llama fluidización líquida o fluidización particulada. Idealmente, un lecho homogéneo es característico de este tipo de operación. Cuando un gas es introducido en un lecho de fluidización líquida, el lecho se convierte en un lecho fluidizado trifásico (Limtrakul, 1996). El contacto simultáneo de las tres fases en un lecho fluidizado trifásico es importante para promover las reacciones químicas y el intercambio de momento, calor y materia entre las fases. Este tipo de operación genera un excelente contacto entre el gas, 9 líquido y partículas sólidas y provee muchas ventajas para aplicaciones en procesos físicos, químicos, bioquímicos en los que se requiere gas, líquido y sólidos. Muchos procesos industriales implican el uso de lechos fluidizados trifásicos, entre ellos procesos de la industria química, hidrometalurgia, tecnología de los alimentos, biotecnología y tratamientos de efluentes (Sivakumar et al., 2008; Couderc, 1985). Las operaciones pueden ser de cristalización, intercambio iónico o adsorción, etc. Algunos ejemplos de aplicaciones industriales típicas conducidas en este tipo de reactores incluyen el proceso de hidrogenación e hidrosulfurización de residuos de petróleo, licuefacción de carbón, proceso de biooxidación de tratamiento de aguas contaminadas (Fan, 1989). La fluidización gas-líquido-sólido puede ser clasificada en cuatro modos de operación (Muyorama y Fan, 1985): fluidización trifásica en cocorriente con líquido como fase continua, en cocorriente con gas como fase continua, fluidización inversa, y fluidización representada por un absorbedor contactor turbulento. Los dos últimos se alcanzan con flujo de gas y líquido en contracorriente. La más utilizada de las formas de operación antes descriptas, ha sido el primer caso. Las características de este modo de operación dependen en gran medida del comportamiento de las burbujas, que varían fuertemente con las propiedades de las partículas sólidas. Una de las principales ventajas de la fluidización es que permite alcanzar en una sola operación lo que de otra manera requeriría múltiples contactores y, por lo tanto, es una unidad de procesamiento importante en los procesos industriales. Además, los lechos fluidizados poseen numerosas ventajas sobre otros tipos de reactores multifásicos, entre otras: • el mezclado dentro del lecho lleva a condiciones prácticamente isotérmicas, y la gran capacidad calorífica del líquido facilita el control de la temperatura del lecho, • la velocidad de transferencia de calor entre el lecho y la pared de la columna, o los tubos intercambiadores de calor que pudieran estar inmersos, es extremadamente alta, • los sólidos en suspensión pueden ser incorporados o retirados sin necesidad de parar la operación, 10 • el rozamiento entre las partículas de sólidos es moderado dado que esta amortiguado por la presencia de líquido. Hay un gran número de procesos físicos, químicos y bioquímicos que se llevan a cabo en sistemas trifásicos, en los cuales la fase sólida está en la forma de fase fluidizada suspendida. A este tipo de contactor se lo refiere algunas veces como lechos fluidizados trifásicos. Sin embargo, pueden distinguirse tres tipos de operación (Fan, 1989): 1. una columna trifásica con sólidos en suspensión (slurry), en la cual pequeñas partículas son suspendidas en el líquido por la agitación con gas inyectado, 2. un lecho fluidizado trifásico, en el cual el lecho de partículas es fluidizado por el líquido y el gas atraviesa el lecho y, 3. un contactor de lecho móvil o turbulento, en el cual las partículas son fluidizadas por un gas e irrigadas por un spray de líquido. En los tres casos existen tres fases en contacto; sin embargo, un lecho fluidizado trifásico se distingue de una columna de burbujeo con sólidos en suspensión (slurry) en que el tamaño de las partículas fluidizadas son relativamente más grandes (mayores que 500µm de diámetro) y la fracción volumétrica de las partículas sólidas es mayor (desde 0.6 a 0.2). En la columna de burbujeo con sólidos en suspensión (slurry) el tamaño de las partículas sólidas normalmente es menor que 100 µm de diámetro y la fracción volumétrica de las partículas sólidas es menor que 0.15 (Fan, 1989). En ambos sistemas, las partículas sólidas pueden ser utilizadas tanto en batch como renovándose continuamente. En una operación continua en un lecho fluidizado trifásico las partículas de sólido son reemplazadas independientemente de la corriente de líquido. En contraste, en una columna de burbujeo con sólidos en suspensión (slurry), las partículas sólidas son, en general, arrastradas por la corriente de líquido. En esta tesis se estudió experimentalmente la fluidización trifásica con flujo en cocorriente ascendente de líquido y gas. Las partículas sólidas fueron fluidizadas por el líquido (fase continua) en circulación ascendente, y dispersando burbujas de gas en cocorriente. 11 El éxito en el diseño y operación de un sistema de lecho fluidizado depende de nuestra habilidad para predecir correctamente las propiedades fundamentales del sistema, especialmente su hidrodinámica, mezclado de las fases individuales, y las velocidades de transferencia de calor y materia. La hidrodinámica del lecho es aún difícil de entender debido a la compleja interacción que existe entre las fases. II.1.2. COLUMNAS DE BURBUJEO Las columnas de burbujeo son sistemas bifásicos gas-líquido en los cuales un gas es dispersado a través de un distribuidor y las burbujas formadas atraviesan un líquido en columnas verticales, con o sin sistemas internos como por ejemplo intercambiadores de calor (Shaikh y Al Dahhan, 2007). Cuando se suspenden polvos finos en el líquido, se forma una fase de sólidos en suspensión (slurry). En este contexto, las columnas de burbujeo se clasifican en bifásicas o trifásicas. Con respecto a la fase gaseosa, la fase líquida o slurry puede estar en cocorriente, contracorriente o en modo batch. El tamaño de las partículas de sólido están dentro del rango entre 5 y 150µm y la carga de sólidos va a partir de 50% en volumen (Krishna et al., 1997). La fase gaseosa puede contener uno o más reactivos, mientras que la fase líquida usualmente contiene productos y/o reactivos (o en algunos casos puede ser una fase inerte). En general, las partículas de sólido se comportan como catalizadores. Generalmente, las condiciones de operación son las siguientes: velocidad superficial de líquido en un rango de 0 a 0.02m/s, siendo ésta un orden de magnitud menor que la velocidad superficial de gas (1 a 0.50m/s). Las columnas de burbujeo ofrecen numerosas ventajas: • buena transferencia de calor y materia entre fases • no tienen partes móviles, • mayor durabilidad de los catalizadores, • fácil operación 12 • bajos costos de operación y mantenimiento. Una de las mayores desventajas de las columnas de burbujeo radica en el retromezclado del líquido o slurry, lo cual puede conducir a menor conversión y disminuir la performance del equipo. Un excesivo retromezclado puede limitarse modificando el diseño de las columnas de burbujeo. Estas modificaciones incluyen el aditamento de sistemas internos, baffles (Deckwer, 1992) o platos perforados (Maretto y Krishna, 2001). Las columnas de burbujeo han sido utilizadas en distintas industrias como contactores o reactores multifásicos, entre otras, la industria química, petroquímica, bioquímica, farmacéutica y metalúrgica, para distintos procesos (Kantarci et al., 2005; Deckwer, 1992; Fan, 1989). Las mismas se utilizan en procesos químicos que involucran reacciones de oxidación, cloración, alquilación, polimerización e hidrogenación (Kantarci et al., 2005). Algunos ejemplos de dichos procesos son la oxidación parcial de etileno en acetaldehído, oxidación húmeda (Deckwer, 1992), síntesis de metanol en fase líquida, proceso Fischer Tropsch (Wender, 1996), hidrogenación de ácido maleico, hidroconversión de petróleos pesados y cortes de petróleo. También han sido utilizadas en biotecnología (Schugerl et al, 1977; Blenke, 1979), en fermentación de antibióticos (Fregapane et al., 1999), tratamiento de lodos cloacales (Diesterwerg, 1978), así como en tratamientos de aguas contaminadas (Beltran et al., 1995; Boyes et al., 1995). Ong (2003) pone de manifiesto la importancia que han ganado en los últimos años en la producción del gas de síntesis (se obtiene a partir carbón o gas natural para producir hidrocarburos como fuentes alternativas de combustible o para agregar valor a químicos como el metanol y/o ceras del proceso Fischer-Tropsch) utilizando columnas de burbujeo trifásicas. 13 II.2. REGÍMENES DE FLUJO La performance de los reactores multifásicos, en particular de columnas de burbujeo y lechos fluidizados trifásicos, depende del régimen de flujo presente durante la operación de los mismos. Regímenes de flujo en columnas de burbujeo En las columnas de burbujeo pueden existir varios regímenes de flujo, dependiendo de las condiciones de operación (Shaikh y Al Dahhan, 2007, 2010). Los regímenes más importantes se denominan homogéneo (bubbly) y heterogéneo, pudiendo éste último ser subclasificado en churn turbulent, slug o annular, dependiendo del diámetro de la columna. Algunos investigadores sugieren que el régimen slug, en el cual las burbujas ocupan prácticamente toda la sección transversal del flujo, es factible solamente en columnas de diámetro pequeño. En los distintos regímenes de flujo, la interacción de la fase gas (dispersa) con la fase líquida (continua) varía considerablemente. Los regímenes en los cuales los equipos industriales operan más frecuentemente son el régimen de burbujeo o bubbly flow y dentro del régimen heterogéneo, el churn turbulent flow en el cual la coalescencia de las burbujas y velocidades de circulación del gas genera borbotones y un notable mezclado turbulento. Dependiendo de las condiciones de operación, estos dos regímenes pueden estar separados por un régimen de transición. El régimen homogéneo ocurre generalmente a velocidades superficiales de gas bajas. Está caracterizado por burbujas de tamaño uniforme, circulando verticalmente con pocas oscilaciones axiales o transversales. Prácticamente no existe choque y ruptura de las burbujas, debido a su dispersión y al reducido tamaño de las mismas. La distribución de las burbujas y, en consecuencia, del hold up o fracción volumétrica de gas es radialmente uniforme: por lo tanto, la recirculación de líquido es insignificante. El tamaño de las burbujas depende mayormente del tipo de distribuidor de gas y de las propiedades físicas del líquido. 14 El régimen heterogéneo ocurre a altas velocidades superficiales de gas. Dado el intenso choque y ruptura de burbujas, pueden aparecer en este régimen desde burbujas pequeñas hasta muy grandes, dando lugar a una amplia distribución de tamaño de burbujas. Las burbujas grandes atraviesan violentamente el líquido, y por este motivo el flujo es denominado flujo churn turbulent. La distribución no uniforme del hold up de gas a lo largo de la dirección radial causa recirculación de líquido en este régimen de flujo. Los regímenes homogéneo y heterogéneo tienen características hidrodinámicas totalmente diferentes. Estas diferencias en la hidrodinámica resultan en diferencias en el mezclado, como así también en las velocidades de transferencia de calor y materia. Por lo tanto, identificar la transición entre estos dos regímenes es muy importante para el correcto diseño y escalado de estos reactores. La transición de régimen de flujo de bubbly a churn turbulent o de churn turbulent a slug depende simultáneamente de parámetros como la velocidad superficial de gas, el diámetro de columna, las propiedades de las fases líquida y gaseosa y el diseño del distribuidor (Urseanu, 2000). Regímenes de flujo en lechos fludizados trifásicos En reactores de fluidización gas–líquido en cocorriente ascendente se han clasificado fundamentalmente tres patrones de flujo diferentes: régimen de burbuja dispersa (dispersed bubble regime), régimen de burbujas coalescentes (coalesced bubble regime) y régimen de flujo slug (Limtrakul, 1996). En el flujo homogéneo de burbujas dispersas, aparecen pequeñas burbujas a altas velocidades de líquido y bajas a intermedias velocidades de gas. El régimen de coalescencia aparece a bajas velocidades de líquido y altas velocidades de gas. Las burbujas son grandes y con una amplia distribución de tamaños. Las mismas ascienden cerca del eje de la columna con gran velocidad. El comportamiento del lecho es más turbulento. En el régimen slug, las burbujas de gas se vuelven más grandes y prácticamente cubren la sección transversal de una columna de diámetro pequeño. 15 Transiciones de régimen de flujo en columnas de burbujeo y lechos fluidizados trifásicos Zhang et al. (1997) ponen de manifiesto que hasta aproximadamente 1996, la mayoría de los estudios sobre regímenes de flujo y sus transiciones habían sido realizados bajo la base de observaciones visuales (sistemas gas-líquido: Griffith y Wallis (1961), Taitel et al. (1980), Fernandes et al. (1983), Hasan y Kabir (1992); sistemas gas-líquido-sólido: Ermakova et al. (1970), Mukherjee et al. (1974), Muyorama et al. (1978), Fan et al. (1986), Song et al. (1989), Nacef et al. (1992, 1996)). Si bien las observaciones visuales dan información sobre los patrones de flujo, es por lo general difícil identificar las transiciones de flujo sin medidas cuantitativas, incluso en columnas transparentes, dada la naturaleza opaca del flujo multifásico que sólo permite observar la zona próxima a la pared. Zhang et al. (1997) propusieron un método basado en la medición de conductividades que podía ser aplicado a sistemas bifásicos y trifásicos. Los autores propusieron ciertos criterios para identificar las distintas transiciones, aplicables tanto para sistemas gas-líquido como para lechos fluidizados trifásicos, y confeccionaron mapas de flujo para las distintas condiciones experimentales estudiadas. Los regímenes de flujo identificados por Zhang et al. (1997) se resumen en la Figura II.2.1, publicada por los autores. Los mapas de flujo confeccionados por los autores, correspondientes a las Figuras II.2.2, II.2.3 y II.2.4, se utilizaron en algunas secciones de esta tesis, motivo por el cuál se analizan en detalle. Figura II.2.1. Esquema de regímenes de flujo en flujo bifásico y trifásico según Zhang et al. (1997). 16 La Figura II.2.2 muestra los límites entre regímenes de flujo, basados en mediciones de conductividad para el sistema bifásico aire-agua estudiado por Zhang et al. (1997). El mapa pone de manifiesto que el régimen de burbujas discretas (discrete bubble flow) predomina a bajas velocidades de gas y líquido, mientras que el régimen de flujo de burbujas dispersas (dispersed bubble flow) se encuentra a mayores velocidades de líquido. Ambos regímenes de flujo, discreto y disperso, se caracterizan por la presencia de burbujas pequeñas con distribución de tamaño relativamente uniforme. Sin embargo, las burbujas del régimen disperso son más pequeñas y más uniformes como resultado de la turbulencia del líquido, mientras que el tamaño de burbuja y su distribución en el régimen discreto puede estar más influenciado por el distribuidor de gas. El régimen de flujo coalescente esquematizado en la Figura II.2.1 no aparece en el mapa de la Figura II.2.2 debido al pequeño diámetro de columna utilizado por los autores para realizar los ensayos, que conduce directamente al régimen slug. El régimen slug se encuentra presente en un amplio rango de velocidades de gas. A bajas velocidades superficiales de líquido (Ul) el comienzo de este régimen es prácticamente independiente de Ul, mientras que a altas velocidades de líquido la transición de régimen disperso (dispersed bubble flow) a régimen slug es función de la velocidad de líquido. Al ir aumentando la velocidad superficial de líquido, la velocidad superficial de gas de la transición de régimen disperso (dispersed bubble flow) a slug aumenta. Las transiciones entre los regímenes slug, churn, bridging y annular son prácticamente independientes de la velocidad superficial de líquido. Para las condiciones estudiadas en el trabajo de Zhang et al. (1997), el régimen de flujo churn sólo está presente para un pequeño rango de velocidades superficiales de gas (Ug). 17 Figura II.2.2. Mapa de regímenes de flujo para sistemas bifásicos aire-agua según Zhang et al. (1997). La Figura II.2.3 muestra el mapa de regímenes de flujo confeccionado por Zhang et al. (1997) para un lecho fluidizado trifásico de bolitas de vidrio (glass beads) de 1.5mm de diámetro. En este caso, el régimen de flujo discreto no existe. Se ha encontrado que la coalescencia entre burbujas es más intensa en sistemas agua-aire que contienen bolitas de vidrio de diámetro menor que 2.5mm, que en el correspondiente sistema gas-líquido, ya que las partículas incrementan tanto la viscosidad como la densidad aparente del líquido (Henriksen y Ostergaard, 1974). La Figura II.2.3 indica que el régimen de burbujas dispersas (dispersed bubble flow) está presente a altas velocidades de líquido. Esto se debe a que el hold up de sólidos de un lecho fluidizado trifásico decrece hacia cero a medida que aumenta la velocidad superficial de líquido (Ul), con el sistema aproximándose entonces al correspondiente límite bifásico gaslíquido. 18 Figura II.2.3. Mapa de regímenes de flujo para un lecho fluidizado trifásico aire-agua-bolitas de vidrio (glass beds) de 1.5mm según Zhang et al. (1997). La Figura II.2.4 presenta un mapa de regímenes de flujo para un lecho fluidizado trifásico con bolitas de vidrio (glass beads) de 4.5mm de diámetro. En este escenario, se observa un régimen de flujo de burbujas discretas (discrete bubble flow), y que el dominio del flujo de coalescencia (coalesced bubble flow) disminuye debido a que las partículas más grandes rompen las burbujas. Se ha encontrado previamente en algunos trabajos citados por los autores (Ostergaard, 1971; Lee et al., 1974) que las burbujas dispersas de tamaño pequeño y uniforme ocurren para tamaños de bolitas de vidrio mayores que 2.5mm en sistemas aire–agua. Zhang et al. (1997) encontraron resultados coincidentes, el régimen de coalescencia (coalesced bubble flow) ocurrió para Ug = 0.02 – 0.04m/s y Ul = 0.02 – 0.05m/s. En este régimen, el gas atraviesa la emulsión líquido– sólido como burbujas de forma irregular y gran tamaño. Este comportamiento difiere del encontrado para bolitas de vidrio de 1.5mm de diámetro, para las cuales observaron 19 burbujas aproximadamente esféricas o cápsulas esféricas en el régimen de flujo de coalescencia. Figura II.2.4. Mapa de regímenes de flujo para un lecho fluidizado trifásico aire-agua-bolitas de vidrio (glass beads) de 4.5mm según Zhang et al. (1997). Kantarci et al. (2005), en su review sobre columnas de burbujeo, pone de manifiesto que Thorat y Joshi (2004) reportaron que las velocidades superficiales de gas a las cuales ocurren las transiciones de flujo también dependen de las dimensiones de la columna (diámetro, altura de la emulsión), del diseño del distribuidor y de las propiedades físicas del sistema. De todos modos, los efectos de estos parámetros no están aún elucidados a partir de los trabajos reportados en la literatura. Los autores también analizaron el hold up de gas crítico, es decir el hold up al cual se produce la transición, y concluyeron que el mismo aumentaba cuando disminuía la relación de aspecto, altura de la emulsión sobre el diámetro de la columna y el diámetro del orificio del distribuidor. Krishna et al. (1994) investigaron la influencia de la densidad del gas 20 en la transición y reportaron que la velocidad de la transición de régimen de flujo aumentaba cuando se incrementaba la densidad del gas. Kantarci et al. (2005) ponen de manifiesto que no es posible dar rangos cuantitativos definitivos para las velocidades superficiales que conducen a transiciones de flujo. Distintos estudios realizados en diferentes sistemas y condiciones de operación conducen a diferentes resultados en la determinación de los límites de regímenes y transiciones. Por ejemplo, Hyndman et al. (1997) propusieron que por debajo de una velocidad superficial de 0.04m/s prevalece un régimen de burbuja. Schumpe y Grund (1986) propusieron que este régimen prevalece para velocidades superficiales por debajo de 0.05m/s. Bukur y Daly (1987) observaron régimen churn turbulent para velocidades superficiales de gas entre 0.02m/s y 0.05m/s. En la Figura II.2.5 se muestra un mapa presentado por Deckwer et al. (1980) que describe cuantitativamente la dependencia de los regímenes de flujo con el diámetro de columna y la velocidad superficial de gas. Este mapa es válido para columnas de burbujeo bifásicas y trifásicas. Figura II.2.5. Mapa de regímenes de flujo para columnas de burbujeo según Deckwer et al. (1980). 21 II.3. ANÁLISIS DE SERIES TEMPORALES El análisis de series temporales se ha empleado reiteradamente en los últimos 25 años para identificar transiciones de flujo e interpretar características de la dinámica de los equipos multifásicos. Generalmente se analizaron series temporales de distintas variables características de acuerdo a diferentes teorías, algunas de las cuales se revisan a continuación. II.3.1. DINÁMICA SIMBÓLICA La dinámica simbólica es una metodología que puede ser utilizada para resaltar ciertos comportamientos de las series temporales experimentales de algún observable en sistemas continuos. El método transforma una serie temporal de una variable observable en una serie temporal de símbolos siguiendo algún criterio. El grado de discretización depende de las necesidades de la clasificación. Si este último, se realiza apropiadamente, la metodología es capaz de ayudar a resaltar comportamientos que pueden actuar como indicadores de la dinámica del sistema en estudio y hasta monitorear la calidad de la dinámica del sistema del cual fueron obtenidas las series temporales experimentales (Daw et al., 2003; Godelle y Letellier, 2000; Finney et al., 1998). Existen dos procedimientos que pueden utilizarse para asignar símbolos a partir de variables medibles: simbolización estática y dinámica. En la simbolización estática, las particiones utilizadas para definir los símbolos están determinadas a partir del rango de observaciones experimentales. El rango puede ser particionado, por ejemplo, en intervalos equiespaciados o con el objetivo de tener igual probabilidad de los símbolos definidos. Luego de definir los símbolos, se obtienen las “palabras” o secuencias simbólicas estableciendo el número de símbolos sucesivos a considerar, como si fueran letras, y se asignan índices a las palabras simbólicas que se generan. El número de palabras simbólicas generalmente se fija entre 8 y 100. A partir de las series temporales de palabras simbólicas se calculan los histogramas que proveen la frecuencia relativa 22 (probabilidad) de aparición de las mismas. La frecuencia relativa de una determinada palabra simbólica provee indicadores de patrones específicos de las series temporales, que pueden ser relacionados con propiedades del sistema en cuestión. A partir de los histogramas se pueden calcular estadísticos para examinar comportamientos particulares de las series temporales originales, o evaluar diferencias significativas en la dinámica del sistema en estudio. El análisis simbólico de datos experimentales fue utilizado en los últimos años para clasificar diferentes estados dinámicos y para monitorear la fluidización (Daw et al., 2003; Godelle y Letellier, 2000; Finney et al., 1998). II.3.2. TEORÍA DEL CAOS Cassanello et al. (1995) manifiestan que la evolución temporal (dinámica) de un sistema de multipartículas puede ser obtenida, desde un punto de vista microscópico, aplicando la ley de Newton para el movimiento de cada partícula. Si el número de partículas es grande, se dice, en general, que el sistema tiene infinitos grados de libertad. Hasta hace un poco más de dos décadas, se creía que si uno era capaz de escribir y computar las ecuaciones diferenciales para todos estos grados de libertad, entonces podía ser predicha la evolución de cualquier sistema. Ahora se sabe que existen sistemas en los cuales no es posible evadir la imprediscibilidad, ya que, ésta aparece por la sensibilidad de la evolución del sistema a las condiciones iniciales (Moon, 1992; Hilborn, 1994). Una incertidumbre diferencial en las condiciones iniciales crece exponencialmente en el tiempo y vuelve al sistema completamente impredecible aunque éste pudiera ser descrito por pocas ecuaciones diferenciales ordinarias. A este tipo de sistemas se los denomina caóticos. La dinámica del sistema es generalmente descripta en un espacio de fases multidimensional (state space). Un punto en este espacio representa el estado del sistema en un determinado momento. Su evolución en el tiempo describe una trayectoria. Para un sistema disipativo, a medida que el tiempo tiende a infinito, la trayectoria tiende a un conjunto de volumen cero en el espacio de fases: un atractor. Por 23 lo tanto, un atractor describe la dinámica del sistema luego de que hayan pasado todos los transientes. Para los sistemas que generalmente se estudian en ingeniería química, estos atractores son generalmente puntos fijos o evoluciones periódicas, círculos finitos, conjuntos de dimensiones 1 ó 0. Cuando un sistema es caótico, los atractores aparecen como objetos geométricos raros, usualmente con dimensiones no enteras. Se conocen como objetos fractales, de acuerdo a la definición de Mandelbrot (1982), y en este caso los atractores son llamados “atractores extraños”. La dimensión del atractor da una indicación de los grados de libertad que permanecen activos luego de que todos los transientes desaparecen. Un sistema determinístico, cuyo estado actual está en principio totalmente determinado por las condiciones iniciales y las ecuaciones que describen su evolución temporal, puede confundirse pareciendo estocástico si la dinámica es suficientemente complicada. Sin embargo, si la evolución puede aún describirse por ecuaciones diferenciales, el sistema es un sistema caótico. Las condiciones necesarias para que la evolución de un sistema determinístico sea caótica son: • El sistema debe tener al menos tres variables dinámicas independientes. • Las ecuaciones que describen la evolución deben contener un término no lineal que acople varias variables. Caracterización de sistemas caóticos El estado de un sistema caótico a un determinado tiempo puede ser determinado proyectando todas las variables que gobiernan el sistema en el espacio de fases (state space). La evolución temporal del sistema describe una trayectoria única en el espacio de fases. En un sistema disipativo, para tiempos tendiendo a infinito, todas las trayectorias convergen a un atractor, es decir a una región en el espacio de fases. Desde luego, es prácticamente imposible conocer y medir todas las variables que influyen sobre un sistema. Sin embargo, Takens (1981) demostró que las características del atractor que describe a un dado sistema pueden reconstruirse a partir de la serie temporal de una única variable característica del sistema, tomando mediciones realizadas a distintos tiempos (Hilborn, 2000). 24 Entre los parámetros utilizados para caracterizar atractores extraños los dos más importantes son su dimensión y la entropía de Kolmogorov que caracteriza el grado de imprediscibilidad del sistema. Reconstrucción del atractor La propuesta demostrada por Takens (1981) indica que la dinámica cualitativa de un sistema disipativo puede ser inferida experimentalmente a partir de una serie temporal de una variable que provea información de todo el sistema X(t), tomando mediciones en distintos tiempos: Χ(t) = χ(t1), χ(t2),……., χ(tN) = (χ1, χ2, ,χN) (II.3.2.1) El atractor que describe la evolución del sistema en el espacio de fases, puede ser reconstruido generando los vectores en un espacio m-dimensional ficticio o de inclusión embedding. En este espacio se reconstruyen las trayectorias del sistema. Estas trayectorias reconstruidas tendrán las mismas propiedades geométricas y dinámicas que caracterizan a las verdaderas trayectorias del sistema en el espacio de fases real. La dimensión del espacio de embedding debería ser lo suficientemente grande como para evitar trayectorias cruzadas. Takens (1981), sugirió que la dimensión de embedding, m, debe ser: m ≥ 2D + 1, donde D es la dimensión del mínimo subespacio de fases que contiene al atractor que caracteriza la evolución dinámica del sistema en estudio a tiempo infinito, necesaria para poder capturar completamente la dinámica del sistema. Para obtener un punto del atractor en el espacio de embedding, debería observarse el comportamiento de la variable elegida en una ventana de tiempo de mt, siendo t el tiempo de muestreo. Dimensión del atractor Para caracterizar un atractor se pueden definir varias dimensiones que pueden clasificarse como “métricas o fractales” y “probabilísticas o de medida natural”. Las dimensiones métricas solamente consideran la geometría del atractor. Las dimensiones de “medida natural” proveen además una noción de la frecuencia relativa con la que una trayectoria visita las diferentes regiones del atractor (Farmer et al., 1983). Típicamente, 25 toman valores más pequeños que los de las dimensiones métricas. Dentro de las dimensiones probabilísticas, la “dimensión de correlación” es la más simple de estimar a partir de series temporales experimentales utilizando un método propuesto por Grassberger y Procaccia (1983a). La razón para evaluar la dimensión del atractor es que ésta provee una indicación del número de grados de libertad del sistema dinámico (es decir, el número de variables que se necesitan para describir el estado asintótico del sistema). El método utiliza la definición de la integral de correlación: C(r) = 1 ∑ He(r − || ωi − ω j ||) N(N − 1) i ≠ j (II.3.2.2) La ecuación II.3.2.2, conocida también como función de correlación, determina el número de pares de puntos (ωi, ωj) sobre el atractor que se encuentran a una distancia menor que r en el espacio de fases. N es el número de puntos del atractor reconstruido y He es la función de Heaviside. La misma permite contar el número de puntos que están dentro del radio r desde el punto ωi. Si el módulo de la diferencia entre los puntos ωi – ωj es mayor o igual que r, entonces He = 0, por el contrario, si es menor, entonces He = 1. Luego, la función de correlación II.3.2.2 determina el promedio del número de puntos a una distancia menor que r de ωi. Luego, la dimensión de correlación D se calcula teniendo en cuenta la variación de C(r) con r: C(r) ∝ lim r D r →0 (II.3.2.3) Entropía de Kolmogorov Una característica importante de un sistema caótico es su velocidad de pérdida de información, es decir, cuál es la precisión requerida en las condiciones iniciales para que sea posible la predicción de la evolución del sistema durante un cierto período de tiempo (Grassberger, 1986). La pérdida de información en un sistema caótico proviene de la divergencia exponencial de trayectorias cercanas. Ésta se cuantifica por la entropía de Kolmogorov (KE). Valores positivos de la KE indican indudablemente evoluciones caóticas. 26 Para un sistema disipativo no caótico, la KE es nula. Para un proceso completamente estocástico, su valor es infinito, haciendo imposible acceder al estado del sistema aunque sea luego de un intervalo de tiempo diferencial. Para el caso de un sistema caótico, la KE es finita y positiva (Grassberger y Procaccia, 1983b). II.3.2.1. TEST DE DIKS El trabajo de Diks et al. (1996) propone un test para evaluar la hipótesis de que dos series temporales tienen la misma distribución de vectores de retraso, condición necesaria para que hayan sido generadas por el mismo mecanismo. El método se basa en un concepto de distancia general entre distribuciones multidimensionales. Se construye un estadístico conformado por estimadores del cuadrado de esta distancia y su varianza. Ambos estimadores se calculan a partir de un conjunto de vectores observados, asumiendo independencia entre los mismos. Esto provee un test consistente para evaluar la hipótesis nula de que dos conjuntos de vectores independientes hayan sido generados por la misma distribución de probabilidades. f f Definición de la distancia entre dos distribuciones de probabilidades: ρ1( r ) y ρ2( r ) pertenecientes a un espacio { m ( ) { } f Se considera el caso de N1 vectores, X i { } f f ρ1 X i y N2 vectores Yi N2 i =1 N1 i =1 con distribución de probabilidades ( ) f con distribución de probabilidades ρ2 Yi . Se definen a continuación las distribuciones alisadas mediante la convolución de cada distribución de probabilidades con una Gaussiana. Definiciones En primer lugar, Diks et al. (1996) definen la distribución alisada ρ'κ como la convolución de la distribución ρκ con κ como sigue: 27 f f f f f ρ'κ ( r ) = ∫ ds ρ κ ( s ) κ ( r, s ) para κ ∈ {1, 2} f f donde κ ( r, s ) es una Gausiana definida por: f f κ ( r, s ) = ( 2πd ) −m e ( ) f f2 − r − s / 2d 2 (II.3.2.1.1) (II.3.2.1.2) donde ││ denota la distancia Euclidea en { m y d > 0 es una escala fija. La motivación para introducir la distribución alisada se debe a que los estimadores que se quieren lograr en términos de los vectores obtenidos experimentalmente pueden encontrarse fácilmente para ρ'κ , para cada punto en { m . Luego, un estimador de ρ'κ se obtiene como: 1 N1 f f ‹ ' f ρ1 ( r ) = ∑ κ ( r, x i ) N1 i =1 ( (II.3.2.1.3) ) f f donde el valor esperado de κ r, X i es: ∫ dX ρ ( X ) κ ( r, X ) = ρ ( r ) f f i 1 f f i i ' 1 f (II.3.2.1.4) para todo i. Luego, Diks et al. (1996) definen la distancia Q como: ( Q = 2d π ) ∫ drf ⎡⎣ρ ( fr ) − ρ ( fr )⎤⎦ m ' 1 ' 2 2 (II.3.2.1.5) Para cada d > 0, la raíz cuadrada de la distancia Q define una distancia entre las distribuciones de probabilidades ρ1' y ρ'2 , basada en el producto ( ρ1' - ρ'2 ) consigo f f mismo. Luego, Q = 0 si y solo si ρ1' ( r ) = ρ'2 ( r ) . Diks et al. (1996) reescriben la distancia Q con el objetivo de encontrar un estimador de la misma: Q = Q11 + Q 22 + Q12 (II.3.2.1.6) donde, 28 ( Q kl = 2d π ) ∫ drf ρ m ' k ( r ) ρ'l ( r ) f Sustituyendo y calculando la integral, ( 2πd se obtiene, ) −2m f − fr − fs 2 / ( 2d 2 ) − fr − ft 2 / ( 2d 2 ) = ⎣⎡ 2π ∫ dr e f ( ) 2d ⎤ ⎦ (II.3.2.1.7) −m e ( ) f f2 − s − t / 4d 2 ( f f f f f f Q kl = ∫∫ ds dt ρk ( s ) h s, t ) ρl ( t ) con (II.3.2.1.8) (II.3.2.1.9) ( f f2 − s − t / ( 4d 2 ) f f h s, t ) = e (II.3.2.1.10) ( xi , x j ) , f f f f f f N2(N2-1)/2 diferentes pares de vectores ( yi , y j ) y N1N2 diferentes pares ( x i , y j ) , se Luego, dado que se tienen N1(N1-1)/2 diferentes pares de vectores define el estimador de Q como: ( ) ( ) f f f f 1 1 2 Q= h X , X h Y + ∑∑ ∑∑ i j i , Yj − 1 ≤ i < j ≤ N1 1 ≤ i < j ≤ N2 N1 N 2 ⎛ N1 ⎞ ⎛ N2 ⎞ ⎜ ⎟ ⎜ ⎟ ⎝ 2⎠ ⎝ 2 ⎠ ∑∑ h ( X , Y ) N1 N 2 i =1 j=1 f f i j (II.3.2.1.11) Considerando un conjunto de vectores totales que incluye todos los vectores de ambas distribuciones, donde N = N1 +N2: f f ⎧ xi zi = ⎨ f ⎩ yi − N1 1 ≤ i ≤ N1 N1 < i ≤ N (II.3.2.1.12) La varianza del estimador bajo la hipótesis nula, para el conjunto de vectores total es: ⎛ ⎞ ⎜ ⎟ 2 ( N − 1) ( N − 2 ) 1 2⎟ ⎜ Vc Q = ∑∑1 ≤ i < j ≤ N ψij ⎟ N1 ( N1 − 1) N 2 ( N 2 − 1)( N − 3) ⎜ ⎛ N ⎞ ⎜⎜ ⎟ ⎟ ⎝⎝ 2⎠ ⎠ ( ) 2 (II.3.2.1.13) 29 donde, ψ ij = H ij − g i − g j 1 f f f f Hij = h ( zi , z j ) − h z ( ∑∑ i,zj ) 1≤ i < j ≤ N ⎛ N⎞ ⎜ ⎟ ⎝2⎠ gi = 1 ∑ Hij N−2 j (II.3.2.1.14) (II.3.2.1.15) (II.3.2.1.16) j≠ i Mayores detalles para llegar a este resultado se encuentran en Diks et al. (1996). Por último, se define el estadístico S como: S= ( ) Q (II.3.2.1.17) Vc Q siendo S una variable aleatoria con promedio cero y desviación estándar igual a 1, bajo la hipótesis nula. La distancia Q aumenta a medida que difiere el mecanismo que generó las series temporales que se están comparando. La desviación cuantifica la dispersión de la distribución de los valores de Q para cada comparación. Luego, el valor de S aumenta cuando aumenta la certidumbre con la que se calcula la diferencia entre las dos series temporales. Es decir, si S aumenta hay mayor certeza que las dos series temporales no están generadas por el mismo mecanismo. Aplicación a distribuciones de vectores de retraso El test propuesto por Diks et al. (1996) considera dos conjuntos de vectores de retraso construidos a partir de series temporales experimentales. El test no hace suposiciones a priori sobre las características del sistema de estudio; el mismo podría ser caótico, regular, o aleatorio. 30 Dada una serie temporal, se puede construir un conjunto de vectores con un retraso de τ y el conjunto consistiría en L =M-(m-1)τ vectores: f M x i = ⎡⎣si ,si +τ ,...,si +( m −1)τ ⎤⎦ para una serie escalar {si }i =1 (II.3.2.1.18) Cuando se definen las propiedades de S bajo la hipótesis nula, se asume independencia entre los vectores de retraso. Pero en la práctica, aunque las series temporales consistan en datos independientes e idénticamente distribuidos, la mera construcción de los conjuntos de vectores introduce una dependencia. A su vez, la estructura dinámica dentro de las series temporales introducirá dependencia entre los vectores de retraso. En el trabajo de Diks et al. (1996) se muestra como el test resulta menos eficiente a medida que se pierde la independencia. Para evitar este problema Diks et al. (1996) proponen una modificación en el test que minimiza el efecto de la dependencia. El trabajo propone utilizar h ' en vez de h en la definición del estimador Q , donde: h ' ( i ' , j' ) = 1 L2 ∑∑ h ( z L L p =1 q =1 f i' L + p f , z j'L + q ) (II.3.2.1.19) Para valores de L suficientemente grandes, los vectores de retraso podrán ser considerados independientes para propósitos prácticos. Mayores detalles pueden encontrarse en Diks et al. (1996). Parámetros a tener en cuenta durante la implementación del test Parámetro L El parámetro L debe ser mayor que la escala de tiempo dentro de la cual aún hay dependencia entre los datos medidos. Parámetro d Este parámetro fija la escala en la que se alisa la distribución. Por lo tanto, si se lo elige relativamente pequeño, Q comenzará a tomar en cuenta diferencias locales 31 entre ρ1 y ρ2. Si se lo elige muy pequeño, lleva a poca estadística. Si, en cambio, se f f eligiera un d grande, las distribuciones de los vectores de retraso ρ1' ( r ) y ρ'2 ( r ) quedarían tan alisadas que se volverían indistinguibles. Por lo tanto, habrá un valor del parámetro d óptimo de compromiso que reduce razonablemente estos dos efectos. Rechazo de la hipótesis nula Diks et al. (1996) establecieron que la hipótesis nula puede ser rechazada cuando los valores de S son grandes. Los autores proponen un valor de corte de S = 3 para que los resultados tengan un nivel de confianza del 95%, basados en los resultados de Pukelsheim (1994) conocidos con el nombre de la regla de las 3σ (“The three sigma rule”). Por otro lado, en la sección II.3.2 se describió cómo, desde el punto de vista de la teoría del caos, se puede reconstruir lo que denominamos atractor a partir de vectores de retraso extraídos de una serie temporal experimental; este atractor es considerado como la huella digital del estado hidrodinámico de un sistema en estudio. Un atractor que caracteriza un sistema es aquel que se obtendría si fuésemos capaces de determinar todas las variables que dominan su evolución en el tiempo, y las proyectáramos en el espacio multidimensional correspondiente. Es único para cada sistema y, por lo tanto, representa su huella dactilar. Si bien es imposible conocer y medir cada una de las variables que gobiernan un sistema, Takens demostró en 1981 que los estados dinámicos de un sistema pueden ser reconstruidos a partir de la evolución temporal de una sola variable característica. A partir de las series temporales de N valores de dicha variable, pueden construirse coordenadas de retraso de dimensión m, con retraso τ. De esta manera, se obtiene un conjunto de N-(m-1)τ vectores de retraso. La evolución temporal de estos vectores en el espacio multidimensional de m dimensiones constituye el atractor reconstruido. Como ya se explicó en la sección II.3.2, Takens probó que este atractor reconstruido tiene las mismas características dinámicas que el atractor que surge de considerar todas las variables que gobiernan el sistema. 32 Luego, se observa que la forma en la que se construyen los vectores de retraso a partir de las series temporales experimentales para la construcción del atractor en el marco de la teoría del caos, es la misma forma en la que, en el test propuesto por Diks et al. (1996) se construyen los vectores que describen la distribución de probabilidades. Nuevamente se recuerda que el test presentado por Diks et al. (1996) no hace suposiciones acerca de las características del sistema que se quiera estudiar. Es decir, es un test totalmente general que puede aplicarse a cualquier sistema. De esta forma, la distancia dada por el estimador Q para la distribución de probabilidades de un sistema general, representa una distancia entre atractores, cada uno de ellos reconstruido a partir de una serie temporal de alguna variable característica del sistema. Los primeros en poner en práctica este concepto fueron van Ommen et al. (2000). Ellos propusieron por primera vez utilizar el test de Diks et al. (1996) como método de monitoreo para la detección temprana de aglomeración en lechos fluidizados bifásicos. La aglomeración ocurre en lechos fluidizados bifásicos debido a un alto contenido de sólidos de la mezcla o temperaturas muy elevadas en el lecho. Afecta la calidad del mezclado de los sólidos y puede llegar a una defluidización, produciendo bloqueos parciales del distribuidor, una mala distribución del gas, zonas calientes, incrementos locales en la velocidad de gas y, en el peor de los casos, podría bloquear completamente el distribuidor, obligando a interrumpir la operación. Como la defluidizacion generalmente ocurre en un lapso de diez minutos o más, podrían tomarse medidas si se contara con un aviso temprano de que la calidad de fluidización está alterada. Van Ommen et al. (2000) propusieron observar el atractor del sistema como un método de monitoreo de la calidad de la fluidización, reconstruyendo el mismo a partir de series temporales de fluctuaciones de presión (variable característica) medidas en posiciones determinadas en el lecho fluidizado. El método es capaz de detectar si ha ocurrido algún cambio en la hidrodinámica del sistema sin dar cuenta de que tipo de cambio ha ocurrido. El método de monitoreo propuesto por van Ommen et al. (2000) se basa en la comparación de una serie temporal de referencia, medida durante una condición de operación del reactor deseada o ideal, con sucesivas series temporales medidas durante la operación del reactor (llamadas series de evaluación). La variable característica es la 33 presión, obteniéndose series temporales de fluctuaciones de presión. La evaluación se realiza midiendo series temporales de fluctuaciones de presión durante períodos en los cuales tienen lugar diversos sucesos como cambios en la velocidad superficial de gas, cambios en la masa del lecho, cambios en la distribución del tamaño de partícula, etc. En el trabajo se estudian por separado cada uno de estos eventos y la habilidad del método para detectarlos a todos en un mismo experimento. A su vez, se estudia también la habilidad del método para detectar un cambio gradual. Por lo tanto, dado un sistema de estudio con comportamiento caótico, la hipótesis nula de que los conjuntos de vectores de la experiencia de referencia y de prueba surjan de la misma distribución de probabilidades, implica que los dos conjuntos de vectores corresponden al mismo mecanismo dinámico. A continuación se enumeran algunos de los aportes más importantes del trabajo de van Ommen et al. (2000) durante la adaptación del test de Diks et al. (1996) a sistemas caóticos experimentales: • Para que el test no fuera tan sensible a la velocidad superficial de gas (dado que en equipos de escala industrial el suplemento de gas puede no ser constante • durante toda la operación), propusieron que las series sean normalizadas. • por un vector de retraso. Se define el termino “ventana de tiempo” para referirse al tiempo representado Proponen que los vectores se reconstruyan con saltos de m a lo largo de las series temporales, en vez de saltos de 1 como se proponía en el trabajo de Diks et al. (1996). Esto se debe a que Diks et al. (1996) trabajaron con series de cientos de puntos mientras que, para describir en forma adecuada las características de un sistema en el marco de la teoría del caos, se utilizan series de más de 10000 puntos. Van Ommen et al (2000) establecieron que este cambio incrementa en m2 el tiempo de cálculo del estadístico S, teniendo limitada • influencia en la performance del test. Los parámetros óptimos encontrados para el lecho fluidizado bifásico que utilizaron fueron: Largo de la serie: 72000 puntos; ventana de tiempo: 50 ms; m: 20; d: 0.5; L: 3s. Asimismo, establecieron que pequeñas variaciones alrededor de los parámetros óptimos tienen poca influencia en el test. 34 • Proponen un método para la extensión del test para el caso de tener múltiples señales. Posteriormente, Villa et al (2003) aplicaron el método de monitoreo tal como lo habían desarrollado van Ommen et al (2000) para estudiar el efecto de la formación de espuma en columnas de burbujeo, midiendo fluctuaciones de presión. El sistema que utilizaron fue agua/etanol en distintas concentraciones y estudiaron el problema tanto en régimen homogéneo como heterogéneo. Estos autores utilizaron una columna de burbujeo de 0.19m de diámetro interno y 4m de alto, llenando la columna con agua hasta una altura de 0.60m. Adicionaron sucesivamente pequeñas cantidades de etanol para simular la formación de espuma, incrementándose así con el tiempo la concentración de surfactante. Las fluctuaciones de presión fueron medidas con tres sensores piezoeléctricos a 0.13m, 0.33m y 0.53m por encima del distribuidor. Los parámetros utilizados fueron los mismos que utilizaron van Ommen et al. (2000). Los experimentos fueron, a su vez, filmados con cámaras de video. Experimento en régimen homogéneo: Al incrementar la concentración de etanol en etapas llega un momento en que dos de los sensores (0.33m y 0.53m) dan valores de S mayores que 3, siendo el más sensible el que estaba ubicado a 0.53m. Este cambio en la hidrodinámica se registra mucho antes de que la formación de espuma cause serios problemas (evidenciado por el monitoreo con la cámara de video). La medición de la caída de presión promedio no es sensible al cambio hidrodinámico. El sensor ubicado a 0.13m no da buenos resultados. Experimento en régimen heterogéneo Se realizaron experimentos similares a los de régimen homogéneo, encontrándose que S toma valores mayores que tres para concentraciones menores que las encontradas en régimen homogéneo. Nuevamente el sensor ubicado a 0.13m no da buenos resultados mientras que los otros dos dan valores mayores que 3. En este caso el 35 más sensible fue el ubicado a 0.33m. La caída de presión promedio no es sensible al cambio en la hidrodinámica. Dado que la posición del sensor más sensible depende del régimen, sin que haya una razón aparente, no hay aún un resultado concluyente respecto de cuál debe ser la altura óptima a la que deben estar ubicados los sensores para detectar mejor el cambio hidrodinámico. En consecuencia, los autores proponen que en futuros estudios deberán examinarse otros sistemas espumantes y profundizar la investigación sobre la influencia de la posición del sensor en el método. Este método de monitoreo, implementado por primera vez por van Ommen et al. (2000), fue utilizado en otras aplicaciones por miembros del mismo grupo. Stienstra et al. (2005) lo utilizaron en un reactor industrial para la producción de polietileno. En este tipo de reactores pueden encontrarse varios regímenes de flujo, que pueden desestabilizarse cuando la concentración de sólidos es grande. El objetivo entonces fue la detección temprana de inestabilidades hidrodinámicas. Se utilizaron, nuevamente, mediciones de fluctuaciones de presión a alta frecuencia. Este trabajo pone especial énfasis en optimizar el test con el objetivo de minimizar falsas alarmas ocasionadas por otras causas. Nijenhuis et al. (2007) aplicaron el mismo método, denominándolo “Early Aglomeration Recongnition System (EARS)” del grupo de la Delft University of Technology, en un reactor de lecho fluidizado perteneciente a una planta de combustión de madera en Holanda. El aporte fundamental de este trabajo reside en la adaptación de las mediciones y el análisis de las mismas a circunstancias industriales. En dicho trabajo se describen dos formas de operar en cuanto a la serie de referencia. Normalmente el método comparaba una referencia estática con las series de fluctuaciones de presión obtenidas online. Los autores muestran en Nijenhuis et al. (2007) que el método de la referencia estática es insensible a pequeños cambios en condiciones del proceso. Cuando se encuentran variaciones más grandes en una escala de tiempo relativamente más larga, un método donde la referencia es dinámica o se mueve, es más apropiado. Este método mantendría una diferencia de tiempo constante entre la ventana de referencia y la de evaluación, ambas cambiando continuamente. Cuando en el sistema ocurra una perturbación o se aglomere el lecho, ambos métodos serán capaces de detectarlos, pero el método de la referencia móvil lo detectará dos veces. En este trabajo 36 nuevamente la variable característica analizada es la presión, habiéndose registrado series temporales de fluctuaciones de presión. Cabe destacar que, en todos los trabajos nombrados anteriormente, se utilizaron sensores de presión Kistler modelo 7261. Otro grupo que ha aplicado el test de Diks et al. (1996) luego de haber sido propuesto por van Ommen et al. (2000) fue del Departamento de Ingeniería Química de la Universidad de Saskatchewan, Canadá. Dicho grupo ha publicado varios artículos en los que aplica el test propuesto por van Ommen et al. (2000) con el objetivo de monitorear la granulación en lechos fluidizados durante el proceso de secado de los gránulos para aplicaciones de la industria farmacéutica. Mediante mediciones de fluctuaciones de presión con sensores piezoeléctricos (PCB 106-B, Piezotronics, Depew, NY) y aplicando el test de Diks et al. (1996), los autores encontraron resultados satisfactorios para seguir el proceso de granulación de una emulsión y la determinación del punto final de la misma durante el secado de los gránulos con mucha mayor anticipación que los métodos convencionales (Chaplin et al., 2005a, Chaplin et al., 2005b, Chaplin et al., 2004). El grupo encontró como óptimos los siguientes parámetros: ventana de tiempo = 0.1s, m = 40, d = 0.5, L = 3s, explicando que las diferencias con respecto a van Ommen et al. (2000) se debían a los distintos sistemas fluidizados utilizados. Posteriormente, el mismo grupo utilizó series temporales medidas con tomografía de capacitancia eléctrica ECT (Electrical Capacitance Tomography) para calcular el estadístico S (Chaplin y Pugsley, 2005) para la misma aplicación farmacéutica. Esta vez los parámetros óptimos fueron: ventana de tiempo = 0.1s, m = 10, d = 0.5, L = 3s. De esta manera fueron capaces, gracias al simultáneo análisis visual de los tomogramas, de localizar las posiciones en el lecho donde ocurrían cambios hidrodinámicos durante el período de secado. Esto es imposible de realizar únicamente con las mediciones de fluctuaciones de presión dado que las mismas sólo dan información global de los cambios en la hidrodinámica del sistema. En resumen, se ha hecho una revisión de la capacidad del test de Diks et al. (1996) para el monitoreo de la operación de equipos de escala piloto o industrial. Podemos notar que el test ha sido aplicado en prácticamente todos los casos con mediciones de fluctuaciones de presión, dado que su registro es sencillo y económico. De todas maneras, la presión es una medida global del sistema (resultante de muchas 37 variables) que no da información localizable en el espacio. Además, los resultados respecto de la posición óptima de los sensores en equipos grandes no son concluyentes y requiere validaciones antes de aplicarse a problemas industriales concretos. Una de las motivaciones del presente trabajo es, en consecuencia, validar el método por su aplicación a otra variable característica que proporcione una descripción más detallada del sistema. Dicha variable debe determinarse mediante una técnica no invasiva y que no dependa de su posición en el reactor. A su vez, debe poder medirse en equipos grandes de interés industrial. Por otro lado, las investigaciones realizadas hasta el momento no definen como varían los parámetros del test en el caso de cambiar la variable característica. En esta tesis, se analizaron datos de series temporales de la posición de un trazador obtenido mediante la técnica de “Radioactive Particle Tracking” (RPT). Se examinaron resultados medidos en lechos fluidizados trifásicos de distintos tamaños y con distintas partículas, con el objetivo de predecir transiciones en el régimen de flujo. Se estudió si el test era capaz de ser utilizado como método de clasificación a partir de medidas estáticas, en lugar de emplearlo como método de monitoreo. Luego, el mismo concepto fue aplicado a resultados obtenidos en columnas de burbujeo. En este caso, se compararon los resultados obtenidos a partir de datos de RPT con aquellos que provienen de aplicar el método a medidas de fluctuaciones de presión. Finalmente, se estudió si el test era capaz de detectar el momento exacto en el que ocurre un cambio dinámico en el carácter espumante del líquido, midiendo fluctuaciones de presión. 38 II. 4. TÉCNICAS NO INVASIVAS DE ANÁLISIS Los sistemas de flujo multifásico se caracterizan por una extremadamente compleja estructura de flujo local y es muy difícil establecer una clara relación entre los fenómenos en micro y macro escala. El entendimiento de estos sistemas requiere de la obtención de datos experimentales sofisticados capaces de proporcionar información de forma no invasiva así como también de proveer información a lo largo de todo el campo de flujo. El avance tecnológico tanto en instrumentación como en control computacional ha permitido un gran progreso en el desarrollo de mediciones no invasivas y técnicas de visualización para flujos multifásicos. Las técnicas no invasivas más utilizadas en el estudio de flujo multifásico han sido las técnicas tomográficas y velocimétricas (Chaouki et al., 1997b). Las técnicas tomográficas proveen concentración, hold up, distribución 2D ó 3D de densidad de por lo menos uno de los componentes del sistema multifásico; mientras que las técnicas velocimétricas proveen los aspectos dinámicos de la fase de interés tales como patrones de flujo, campo de velocidades y movimientos instantáneos en 2D ó 3D. Los materiales radiactivos son especialmente apropiados para técnicas de análisis no invasivas por su capacidad de atravesar la materia interactuando con ella en forma diferente en función, fundamentalmente, de la densidad de la misma. Los principios básicos de las técnicas no invasivas que incluyen radiación residen en las propiedades de los núcleos radiactivos. Los núcleos estables tienen una relación neutrón/protón cercana a la unidad para núcleos livianos, que se va incrementando hasta 1.5 para los núcleos más pesados. Los núcleos con deficiencia de protones, neutrones o ultra pesados son inestables y decaerán espontáneamente a una forma más estable. Existen varios mecanismos de decaimiento de estos núcleos inestables para alcanzar la estabilidad: i. decaimiento beta (emisión de electrones), ii. captura electrónica o decaimiento beta (emisión de positrones) y iii. decaimiento alfa para núcleos pesados. 39 Los rayos beta emitidos (electrones o positrones) son útiles en si mismos para imágenes o seguimiento de partículas porque estas partículas cargadas pierden su energía rápidamente en cualquier medio denso y desaparecen. La emisión beta, a veces, lleva a la formación de un estado excitado en los núcleos hijos, que luego decaen al estado estable por medio de la emisión de uno o más rayos gama con una energía característica. Estos rayos gama son una forma energética de radiación electromagnética (fotones), de mayor energía que la luz visible. Esta forma de energía es útil porque penetra materiales densos y el grado de penetración depende de la energía de los fotones emitidos. Los rayos gama pueden provenir de la aniquilación de un positrón proveniente de un núcleo por decaimiento beta al interactuar con un medio denso, emitiendo fotones gama (emisión doble de fotones gama de 511 keV de energía, en direcciones opuestas), o estar originados en un núcleo (emisión de un solo fotón). Esta diferencia de mecanismos afecta el método de detección de la radiación. En función de estas dos posibilidades para el estudio no invasivo del movimiento de fases condensadas en medios densos, se han desarrollados dos técnicas bien diferenciadas de tomografía de emisión de partículas únicas: i) La técnica basada en emisión de positrones, que se conoce como Positron Emmision Particle Tracking (PEPT) y ii) la técnica basada en emisión directa de radiación gama a partir del decaimiento beta de núcleos inestables, normalmente llamada Radioactive Particle Traking (RPT). Los rayos gama, altamente penetrantes, son capaces de atravesar grandes distancias hasta donde pueda estar localizado un detector. El número de fotones registrado por el detector depende de la distancia entre el emisor gama (fuente) y el detector. Este es el principio en el que se basa tanto la técnica de Densitometría como RPT. En el caso de la técnica de Densitometría se utiliza la atenuación de la radiación para el estudio de sistemas multifásicos. En RPT, se utiliza un arreglo de detectores para determinar como se mueve una partícula radiactiva. El número de fotones registrados (rayos gama) por un dado detector es una medida del radio de una superficie aproximadamente esférica con el detector en el centro y la partícula ubicada en la superficie. La posición de la partícula puede ser pensada como la intersección de las superficies correspondientes a los distintos 40 detectores. En principio, tres detectores serían suficientes para determinar la posición de la partícula, pero la resolución aumenta con el número de detectores (redundancia de información). II.4.1. DENSITOMETRÍA El uso de la atenuación de la radiación para el estudio de los sistemas multifásicos como columnas de burbujeo o lechos fluidizados, entre otros, está presente en la literatura desde hace varias décadas. Jones y Zuber (1975) fueron quienes aparentemente utilizaron por primera vez una técnica de atenuación de fotones para la identificación de régimen de flujo en columnas de burbujeo. Ellos estudiaron un sistema bifásico agua-aire en una columna rectangular utilizando un sistema de rayos X. Los autores estudiaron la Función de Densidad de Probabilidades (FDP) y la Función de Probabilidad Acumulada (FPA). Observaron que el régimen de burbujeo (bubbly) estaba caracterizado por un solo pico en la FDP. El flujo de burbujas de gran tamaño con diámetro equivalente al diámetro de la columna (slug), en cambio, tenía una FPD bimodal. El flujo anular estaba caracterizado por un pico simple, parecido al encontrado en el régimen bubbly pero a una fracción mayor. Jones y Zuber no llegaron a deducir una transición de régimen de flujo objetiva a partir de estos datos. Vince y Lahey (1982) volvieron a utilizar atenuación de rayos X en un tubo vertical de 0.0254m. Cada conjunto de datos adquiridos en una posición axial consistía de 6 conjuntos de series temporales de atenuación de fotones de rayos X en 6 posiciones diferentes desde la posición radial central hasta una medición adyacente a la pared de la columna. Se estudiaron distintas condiciones de operación a distintas velocidades de gas con el líquido en batch y variando su velocidad. Cada serie temporal de atenuación de fotones consistía en 12800 lecturas tomadas a 200Hz para cada uno de los 6 conjuntos. Con los datos adquiridos los autores calcularon las FDP normalizadas y la FPA para cada porcentaje de área estudiada. Luego, calcularon los momentos asociados a los histogramas generados por ambas distribuciones. Primero analizaron los momentos de las FDP para los experimentos con velocidad de líquido cero. Cuando graficaron la varianza de la FDP en función de la fracción promedio de gas para cada uno de los 6 41 conjuntos de datos, advirtieron un quiebre no muy notorio posicionado en un 20-30% de la fracción promedio de gas, donde los autores esperaban la transición bubbly – slug. Un quiebre más abrupto fue observado a una fracción entre 70-80%, que los autores asociaron con la transición slug- annular. Luego los autores calculan y grafican el tercer y cuarto momento. Estos son independientes de la posición de la medición excepto cuando el haz traviesa una zona adyacente a la pared, pero no detectan la transición de régimen de flujo, salvo por un leve indicio de la transición slug-anular. Los autores compararon los resultados con los obtenidos con velocidad de líquido distinta de cero. Vince y Lahey (1982) concluyen que la varianza de la FDP es el mejor indicador de régimen de flujo que surge de sus estudios, porque no es muy dependiente de la velocidad superficial del líquido y a su vez es independiente de la posición de la toma de la muestra. Los mismos expresan que un nivel de varianza de 0.04 es la que corresponde con las transiciones bubbly-slug y slug-anular, independientemente de la velocidad del flujo del líquido. Los momentos de las FDA no dan información por si solos. Posteriormente, Bukur et al. (1996) determinaron las distribuciones de hold up radiales y axiales en una columna de burbujeo de 0.21m de diámetro utilizando densitometría de rayos gama. Asimismo, determinaron transiciones de régimen de flujo en columnas de 0.05m y 0.21m de diámetro. Los experimentos fueron realizados en sistemas bifásicos y trifásicos, en batch y en modo continuo, utilizando dos tipos de ceras hidrocarbonadas como fase líquida, nitrógeno como fase gaseosa y partículas de óxido de hierro y sílice como fase en suspensión. El sistema de densitometría gama consistía en dos fuentes radiactivas, una de 137 Cs (50mCi) y otra de 60 Co (35mCi), encapsuladas y colimadas geométricamente, y dos detectores de NaI, también colimados geométricamente. Los autores construyeron diferentes mecanismos para mover las fuentes y los detectores en direcciones axiales y radiales. Se analizaron las series temporales de atenuación de fotones de rayos gama y se determinó la desviación cuadrática media (DCM) y la función de densidad espectral de potencia (DEP) de las fluctuaciones de las señales, las cuales dieron distintos tipos de información sobre las transiciones de flujo. Sugirieron que es posible detectar un cambio en la pendiente de la DCM cuando ocurre la transición de régimen de flujo bubbly a churn turbulent. También calcularon los hold up de gas axiales y radiales, sin obtener buenos resultados. 42 Mudde et al. (1999), estudiaron el comportamiento de un lecho fluidizado de 0.4m de diámetro con partículas de poliestireno para determinar la variación temporal de la distribución espacial de las partículas de sólido. Utilizaron un arreglo de dos fuentes de 137 Cs de 100mCi y dos detectores BGO, separados 12cm entre si. Tanto las fuentes como los detectores estaban colimados geométricamente. A partir de los experimentos se reconstruyó la distribución de los sólidos y se obtuvo información sobre velocidades. También obtuvieron información cualitativa a partir de las FDP. Luego de estos primeros trabajos, varios autores utilizaron la densitometría de rayos gama para medir distribuciones de fases en distintos reactores multifásicos. Xie et al. (2003) determinaron hold up de gas en un reactor trifásico gas–líquido-pulpa de papel. Bhusarapu et al. (2004) utilizaron densitometría de rayos gama con una fuente de 46 Sc colimada geométricamente y detectores de NaI, en un reactor fluidizado con circulación de sólidos. El objetivo del experimento era medir la fracción de volumen de sólidos en una sección del loop en varias posiciones radiales. Jin et al. (2005) utilizaron la misma técnica en una columna de burbujeo de 0.3m de diámetro y 6.6m de alto, operando a alta presión, para estudiar cómo se modificaba la distribución axial del hold up en un sistema bifásico en régimen turbulento cuando cambiaba la velocidad superficial de gas, la viscosidad del líquido, la tensión superficial del líquido, y la presión del sistema. Otros autores también han utilizado la técnica para el estudio de cañerías horizontales. Así, Tjugum et al. (2002) implementaron un mini sistema con una fuente de 241Am (150mCi) y 3 minidetectores colimados, para estudiar la fracción de volumen de gas en un sistema petróleo-agua-gas en cañerías; y Stahl y von Rohr (2004) utilizaron una fuente de 125 I y un detector de NaI para confirmar modelos que matemáticamente describen regímenes de flujo en cañerías. Si bien, sobre todo en las últimas décadas, algunos autores han utilizado técnicas de atenuación de fotones, en su mayoría atenuación de rayos gama, para el estudio de sistemas multifásicos, la información es muy dispersa y no existe un buen criterio sobre cuál es la mejor forma de extraer la información. En su mayoría los experimentos han sido realizados con fuentes de energía y actividades al azar y no existe un estudio que establezca cuál sería la más apropiada en cada caso. Por otro lado, la mayoría de las veces se utilizaron fuentes de muy alta actividad sin justificarse su necesidad, con los 43 riesgos radiológicos y cuidados de manipulación que esto implica. Por otro lado, la mayoría de las veces, se han utilizado colimadores geométricos, tanto para la fuente como para el detector, introduciendo así dificultades en la operatoria de la técnica en caso de su implementación en la industria y por personal no especializado. El objetivo central de la presente sección fue desarrollar una técnica para diagnosticar regímenes de flujo, estudiando en detalle cada parámetro a fin de disminuir al máximo las dificultades operacionales que presentan los trabajos encontrados en la literatura. II.4.2. RPT La tomografía de emisión de partículas únicas, normalmente llamada “Radioactive Particle Tracking” (RPT) es una técnica no invasiva de alta tecnología que permite el monitoreo del movimiento de una partícula radiactiva capaz de representar alguna fase condensada: sólidos (en sistemas gas–sólido, líquido–sólido y gas–líquido– sólido) o líquido (en sistemas gas–líquido). La técnica consiste en seguir el movimiento de esta partícula radiactiva, que actúa como un trazador de la fase de interés. La partícula trazadora contiene un elemento radiactivo que emite rayos gama. Los rayos gama emitidos son detectados mediante un arreglo de detectores de centelleo (en general se han utilizado cristales de NaI), dispuestos estratégicamente alrededor del sistema que se quiere estudiar. Las intensidades de radiación medidas por el conjunto de detectores distribuidos alrededor del equipo permiten reconstruir, mediante algoritmos de reconstrucción inversa, la trayectoria de la partícula radiactiva; luego, dicha trayectoria es analizada para obtener información que caracteriza el movimiento de la fase examinada, como campos de velocidades, parámetros de mezclado y turbulencia, entre otros. Las coordenadas de la partícula se determinan mediante algoritmos de reconstrucción inversos basados en estimaciones empíricas o fenomenológicas, que tienen en cuenta la relación entre el número de fotones registrados por cada detector y la ubicación de la partícula. Además de la distancia a la partícula, el número de fotones 44 registrados depende de las propiedades de atenuación de los materiales que haya entre la partícula y el detector y de las propiedades del detector que se utilice. La técnica de RPT requiere la detección de un alto número de fotones porque el número detectado está sujeto a fluctuaciones estadísticas debidas a la naturaleza estocástica del proceso de decaimiento y el proceso de detección. En principio, pueden estudiarse líquidos y sólidos si se construye un seguidor del flujo (partícula trazadora) apropiado y esto implica lograr un trazador de similares características físicas (tamaño, densidad, forma) y dinámicas (flotabilidad) que la fase en estudio. Naturalmente, para líquidos, se realiza el compromiso de ajustar sólo densidad y flotabilidad. Una vez que se conoce la trayectoria de la partícula en el campo de flujo, se calculan las velocidades instantáneas y locales en la dirección de la trayectoria por diferenciación sucesiva de las coordenadas del trazador. A partir de éstas, se calculan los demás parámetros hidrodinámicos de interés. Historia Las primeras aplicaciones de RPT fueron realizadas por Kondukov et al. (1964), Borlai et al. (1967), y van Velzen et al. (1974), para determinar el campo de velocidades de las partículas en reactores multifásicos utilizando 6 detectores de centelleo. Los trabajos fueron realizados específicamente en lechos fluidizados bifásicos y spouted beds. A pesar de los esfuerzos, la información obtenida en estos trabajos resultó de valor limitado debido a las limitaciones instrumentales y computacionales en esa época. Posteriormente, se desarrollaron versiones de RPT más sofisticadas. La primera, en la Universidad de Illinois en Champaign, donde Lin et al. (1985) estudiaron el movimiento de sólidos en un lecho fluidizado utilizando un arreglo de 12 detectores. Ellos mostraron la existencia de múltiples vórtices de sólido a bajas velocidades de gas, y un cambio en la dirección del movimiento de los mismos cuando se incrementaba la velocidad de gas. Posteriormente, Moslemian et al. (1989) mejoraron el sistema de adquisición de Lin et al. (1985), introduciendo contadores de pulsos digitales, pudiendo así aumentar la frecuencia de muestreo. Asimismo, se reportaron otros trabajos del 45 grupo estudiando los patrones de recirculación de sólidos en lechos fluidizados con burbujeo (Moslemian et al., 1989; Sun et al., 1988; Chen et al., 1983). A principios de los 90, se implementaron nuevos sistemas de RPT en el Chemical Reaction Engineering Laboratory (CREL), perteneciente a la Washington University en St. Louis, Missouri y en la Ecole Politechnique de Montreal, en el Biopro Research Center. A partir de allí la técnica fue incrementando su desarrollo y demostrando sus virtudes para dar información sobre el comportamiento de diversos reactores multifásicos. Varios autores han utilizado la técnica y demostrado su habilidad para estudiar velocidades y parámetros de turbulencia en diversos sistemas: columnas de burbujeo gas-líquido y gas-líquido-sólido (Ong, 2003; Rados, 2003; Gupta, 2002; Degaleesan et al., 2001; Sannaes, 1997, Degaleesan, 1997; Devanathan, 1991; Devanathan et al., 1990); riser líquido-sólido (Roy, 2000); riser sólido–gas (Godfroy et al., 1999; Bhusarapu, 2005); lechos fluidizados bifásicos y trifásicos (Larachi et al., 1994; Larachi et al., 1996; Limtrakul, 1996; Upadhyay & Roy, 2010; Sanaei et al., 2010). En que consiste un experimento de RPT Un experimento típico de RPT consta de dos partes principales: la calibración (experimento estático) y el experimento propiamente dicho (experimento dinámico), donde se estudia el sistema de interés. Históricamente, la calibración se realiza para cada condición de operación que se quiera estudiar. Durante la calibración in situ se ubica la partícula radiactiva en varias posiciones conocidas (cientos o miles dependiendo del algoritmo de reconstrucción y del método de calibración disponible). El trazador contiene un elemento cuyo decaimiento radiactivo está caracterizado por la pérdida de un fotón con energía en la porción gama del espectro electromagnético. Cada fotón genera un pulso o una cuenta cuando impacta un detector de NaI (Knoll, 1989). Por lo tanto, la calibración junta la información del número de cuentas (fotones) que registrará cada detector cuando la partícula trazadora esté ubicada en las distintas posiciones conocidas dentro de la columna. Para cada una de las posiciones de calibración, la partícula se mantiene estática en esa posición mientras se adquiere el conteo simultáneo de todos los detectores, durante el mismo tiempo de 46 muestreo que se utilizará en el experimento dinámico; este conteo se realiza varios cientos de veces (200 – 500). El conjunto del promedio de las cuentas medidas por los detectores conforma la distribución de intensidades gama esperada para cada posición de calibración. Luego, durante el experimento, el trazador se encuentra libre dentro de la emulsión y el conteo simultáneo de todos los detectores se registra con la misma frecuencia de muestreo utilizada durante la calibración. Las cuentas detectadas en simultáneo por todos los detectores durante el experimento junto con la información colectada durante la calibración, se utilizan para reconstruir la trayectoria de la partícula mediante un algoritmo de reconstrucción. En la Figura II.4.2.1 se muestra un esquema de cómo se procede al realizar un experimento de RPT, y el posterior análisis de los resultados. 1) Calibración in-situ: se miden, simultáneamente con todos los detectores en uso, las cuentas provenientes de la emisión del trazador, para un cierto número de posiciones conocidas en las condiciones de operación. + 2) Se deja el trazador libre en la emulsión por un largo período y se colectan las cuentas simultáneamente con todos los detectores durante un período prolongado Algoritmo adecuado Posición instantánea (x,y,z,t) Parámetros de turbulencia S11 Velocidades instantáneas, fluctuantes, y promedio Figura II.4.2.1. Esquema del procedimiento realizado durante un experimento de RPT. 47 Partícula Trazadora El trazador es una partícula que imita el comportamiento del líquido o del sólido que conforman una emulsión bifásica o trifásica que se quiere caracterizar dentro del sistema en estudio. Es fundamental que el trazador represente en forma adecuada al líquido o sólido y no es trivial construir una partícula que imite en forma, tamaño, densidad y flotabilidad a la fase a estudiar y que además contenga un material radiactivo para poder seguir su desintegración. La partícula trazadora también debe cumplir con ciertos requisitos técnicos, como resistencia mecánica, estabilidad térmica e inercia química (Rados, 2003). En primer lugar se recopilan datos referidos a los materiales radiactivos que se han utilizado y luego se revisan los procedimientos de construcción/preparación de la partícula para que cumpla con las propiedades de “partícula trazadora”. Los materiales radiactivos que se utilizan en un experimento de RPT pueden ser producidos por el bombardeo con neutrones del núcleo de algunos elementos determinados (Chaouki et al., 1997). Los neutrones que se utilizan para el bombardeo provienen de un reactor nuclear o de partículas cargadas (protones, deuterones o partículas alfa) de un ciclotrón. Hay varias características de los radionucleidos que tienen importancia a la hora de diseñar un experimento de RPT: el nivel de radiactividad o actividad de la fuente, la vida media, la energía característica de la desintegración de la fuente, el número de rayos gama que se emiten por desintegración, la pureza del elemento, etc. (Chaouki et al., 1997). Actividad del Trazador La actividad de la fuente radiactiva debe conducir a una buena relación señal/ruido a la frecuencia de muestreo deseada pero debe evitarse que los detectores se saturen cuando la partícula se encuentre muy cerca de los mismos. Para isótopos que se producen por activación neutrónica, la actividad que se alcanza depende de la cantidad de elemento “activable” que hay en la partícula, de la sección eficaz del mismo y del flujo de neutrones del reactor nuclear que se utiliza. 48 Estos factores son los que determinan el tiempo de activación necesario para alcanzar una actividad determinada. La actividad límite está determinada por el flujo de neutrones del reactor nuclear y por la masa de material que se puede introducir en la partícula. Vida media La vida media del radioisótopo debe ser mayor que la duración del experimento para que no exista una pérdida significativa de actividad durante el mismo. Esto es particularmente importante cuando los experimentos son muy largos. Por otro lado, es beneficioso trabajar con fuentes radiactivas de baja vida media para reducir problemas de seguridad. Este aspecto es puntualmente beneficioso cuando se quieren usar equipos grandes o donde no es fácil recuperar la fuente radiactiva una vez que se realizó el experimento. De todas formas, esta opción sólo es viable cuando el laboratorio donde se realizan los experimentos está cerca de un reactor nuclear o de un ciclotrón. Energía de los rayos gama El espectro de rayos gama en la región de interés para experimentos de RPT abarca energías aproximadamente desde 100 keV hasta 1000-2000 keV; el mismo puede dividirse en dos regiones fundamentales: la zona de alta energía y la zona de dispersión Compton. La dispersión Compton, es la banda ancha que se observa a la izquierda de la Figura II.4.2.2, donde se muestra un esquema del espectro de energía del 46 Sc. La denominada radiación Compton es una región de fotones de baja energía producidos por dispersión en medios altamente atenuantes. La porción de alta energía del espectro contiene uno o más de los denominados “fotopicos” cuya energía corresponde a la energía de absorción fotoeléctrica. 49 Figura II.4.2.2. Esquema del espectro de energía del 46Sc. Dadas las limitaciones planteadas, hasta el momento, los tres radioisótopos más utilizados en RPT han sido: escandio 46Sc, cobalto 60Co y oro 198Au. En la Tabla II.4.2.1 se muestran algunos de los radionucleidos que decaen por emisión de electrones que se han utilizado en experimentos de RPT (Chaouki et al., 1997): Núcleo Vida Media Rayo Gama (keV) 1368 (100%) / 2754 24 Na 46 Sc 15.1 horas (99.9%) 83.3 días 1120 (100%) / 890 (100%) 1173 (99.9%) / 1332 60 Co 198 Au 5.27 años (100%) 2.69 días 412 (95.5%) Tabla II.4.2.1. Características de los radionucleidos utilizados en RPT según Chaouki et al. (1997). Pureza del trazador Es importante asegurar que los rayos gama que se emiten provienen de un solo elemento radiactivo y no son resultantes de impurezas para tener en cuenta en forma adecuada la velocidad de decaimiento o tiempo de vida media del radionucleido. Una vez elegido el isótopo radiactivo que se va a utilizar, debe construirse la partícula trazadora. La construcción de ésta depende si se quiere trazar el líquido o el sólido. 50 Las partículas radiactivas que harán de trazadoras de la fase en estudio deben tener ciertos requerimientos generales: • Deben tener una densidad lo más cercana posible a la fase que se estudia (sea líquida o sólida). • Deben ser lo más pequeñas posibles con el objetivo de reducir la fuerza de arrastre. En el caso de sólidos, deben tener un tamaño próximo al diámetro medio de las partículas del lecho. Idealmente, su tamaño debe estar comprendido en la distribución de tamaños de las partículas fluidizadas. • Deben ser rígidas y térmicamente estables. • Deben ser completamente mojables por el líquido o tener las mismas características de mojabilidad que las partículas que conforman el lecho fluido. • Deben ser fáciles de manejar con completa seguridad. Seguimiento de sólidos Cuando se trazan sólidos, por ejemplo en columnas de burbujeo con sólidos en suspensión (slurry bubble column), lechos fluidizados gas-sólido o gas-líquido-sólido, comunes o con lecho circulante, spouted beds, etc., la partícula trazadora debe ser dinámicamente idéntica a la fase sólida. Larachi et al. (1994, 1996), en la Ecole Politechnique de Montreal (Canadá) estudiaron el movimiento del sólido en un lecho fluidizado trifásico con partículas de vidrio de 3mm o partículas de PVC de 5.5mm de diámetro. Cuando los sólidos eran partículas de vidrio, el trazador era una partícula hecha de polvo de soda cáustica y óxido de escandio fundidos a alta temperatura. Con 10 a 12% de escandio, la densidad de la partícula trazadora de 3mm era igual que las demás partículas de vidrio con un error del 5%. La partícula estaba recubierta con una capa de diamante de unos pocos micrones de espesor, depositado por radiofrecuencia en plasma de argón; con el objetivo de prevenir su ruptura debido a los choques con las otras partículas que conforman el lecho fluidizado. 51 Cuando se utilizaban lechos de partículas de PVC de 5.5mm, el procedimiento para preparar el trazador consistía en realizar un orificio en una de las partículas para introducir una cantidad suficiente de polvo de óxido de escandio y luego se sellaba con un pegamento adecuado. Limtrakul (1996) también estudió el movimiento del sólido en lechos fluidizados trifásicos empleando bolitas de vidrio de 1 ó 3mm de diámetro, de densidad 2.5g/cm3. El trazador consistía en una bolita maciza de aluminio de 1 ó 3mm de diámetro (ρ = 3.0g/cm3) que adentro contenía una minúscula partícula metálica de 46Sc. La densidad final de la partícula radiactiva era ajustada con el tamaño del agujero en la bolita de aluminio. Cuando se utilizaron partículas de acetato en el lecho, se introdujo una partícula de 46Sc en una de ellas. En los trabajos realizados en el CREL (St. Louis, EE.UU.) para estudiar el movimiento del sólido en reactores fluidizados circulantes (risers) o en columnas de burbujeo trifásicas, donde los sólidos tienen diámetros de 150 – 750µm, se utilizaron partículas de 46 Sc metálico de tamaño apropiado recubiertas de una fina capa de polímero (Parylene N, ρ = 1.1g/cm3), que permite alcanzar la densidad de las partículas sólidas y proteger al escandio de la abrasión durante el experimento. Asimismo, como el escandio es un metal que pertenece a las tierras raras y reacciona tanto con agua (fase líquida) como con el oxígeno del aire (fase gaseosa) debe aislarse con este recubrimiento inerte. Por otro lado, las propiedades mecánicas del escandio no son buenas para su aplicación en sistemas en suspensión (slurry) porque es muy blando. Por lo tanto, es necesario proteger al escandio metálico con una película que incremente su resistencia química y fuerza mecánica, al mismo tiempo que sea capaz de reducir la densidad. El CREL desarrolló en colaboración con Para Tech Coating, Inc. un procedimiento de recubrimiento utilizando un polímetro llamado Parylene N (www.paralyne.com). Se trata de una película transparente que se deposita en la superficie del metal a partir de una fase gaseosa haciendo vacío (sistema de deposición Para Tech 2000H). En la Figura II.4.2.3 se muestra un esquema de una partícula terminada extraído de la tesis de Bhusarapu (2005) donde se intentaba trazar vidrio de 150µm y 2.5g/cm3. 52 Figura II.4.2.3. Esquema de la composición de una partícula radiactiva utilizada para trazar sólidos en un riser. Extraído de Bhusarapu (2005). Ejemplos de estudios realizados con este tipo de partículas son los trabajos de Bhusarapu (2005), donde se estudio el movimiento de la fase sólida en el riser de un lecho fluidizado circulante gas–sólido y Rados (2003), quien estudió la fase sólida en una columna de burbujeo con sólidos en suspensión (slurry bubble column) a alta presión. Seguimiento del líquido El primero en seguir el movimiento del líquido en una columna de burbujeo fue Devanathan (1991). El trazador que adoptó consistió en un cilindro de 45Sc de 0.7mm de diámetro y 1mm de largo, embebido dentro de una esfera de polipropileno de 2.38mm de diámetro. En la esfera se realizaba un orificio de tamaño mayor que el del cilindro de escandio con el objetivo de bajar la densidad del sistema. Luego, el sistema era sellado con un tapón, especialmente fabricado para tal fin. En la Figura II.4.2.4 se muestra un esquema de esta partícula extraída de la tesis de Devanathan (1991). 53 Figura II.4.2.4. Esquema de la composición de la partícula radiactiva utilizada por Devanathan (1991). El siguiente trabajo registrado en la literatura donde se traza la fase líquida en una columna de burbujeo es en el trabajo de Degaleesan (1997). El método de preparación en este trabajo es similar al de Devanathan (1991): se utilizó una esfera de 2.36mm con un orificio de aire tal que la composición final polipropileno–escandio-aire tenía una densidad muy cercana a la del agua (entre 0.9995 y 1.0005 g/cm3). El método de preparación era similar al de Devanathan (1991), con la diferencia que en vez de utilizar el cilindro de 45Sc, dentro del agujero de aire de la esfera se introdujeron varias partículas metálicas de escandio de tamaño entre 10 y 100µm. De esta forma se obtenía más libertad para ajustar el peso de la partícula final y por ende su densidad. Degaleesan (1997) tenía especial cuidado durante la preparación de la partícula de lograr que la misma tuviera una densidad menor que la del agua (0.95g/cm3) antes de mandarla a irradiar. Una vez irradiada, la partícula era recubierta con pintura refractaria con varios propósitos; el primero era tratar de ajustar la densidad lo más próxima posible a la del agua (ρ = 0.9995g/cm3). Por otro lado, el polipropileno es un poco hidrofílico y se embebe en agua muy lentamente y, en consecuencia, la partícula se vuelve más pesada con la exposición al agua (5 – 6 horas). Cubriendo el polipropileno con pintura, se provee una protección a la partícula contra el agua, al mismo tiempo que ayuda a mantener la densidad de la partícula durante todo el experimento. Finalmente, el recubrimiento con la pintura también sirvió para mejorar las características de mojabilidad de la partícula, disminuyendo la posibilidad de que se 54 peguen burbujas a la superficie de la misma durante el experimento. La ocurrencia de este fenómeno es indeseable dado que provoca una disminución de la densidad efectiva de la partícula. Degaleesan (1997), utilizó para todos sus experimentos una partícula cuya densidad estaba ajustada para llegar a una velocidad de Stokes de 0.1 a 0.25 cm/s. Por observación visual de la partícula agitada en un líquido, la respuesta de la misma indicaba que la partícula fabricada era capaz de seguir bien el líquido. Más tarde, Ong (2003), estudió columnas de burbujeo a altas velocidades de gas y a alta presión y la partícula utilizada anteriormente de 2.33mm de diámetro dificultaba el seguimiento del líquido en condiciones extremas de gran hold up de gas. Por lo tanto, era necesario reducir el tamaño de la misma con el objetivo de construir un buen trazador de líquido para el nuevo sistema en estudio. Ong (2003) utilizó una partícula de poliestireno de 1mm de diámetro agujereada, de densidad 1.05g/cm3 y sellada con pegamento una vez que partículas metálicas de 46 Sc previamente irradiadas fueran introducidas en un agujero de 0.3mm de diámetro. Luego, la partícula es recubierta con pintura negra para asegurar que la misma permanezca mojada durante toda la operación. La densidad aproximada de la partícula compuesta era entre 0.999 – 1.001 g/cm3 y su velocidad de Stokes de alrededor de 0.02 a 0.1 cm/s. En la Figura II.4.2.5 se muestra un esquema de esta partícula. Figura II.4.2.5. Esquema de la partícula implementada por Ong (2003). Reconstrucción de la posición de la partícula trazadora Para una dada actividad de la partícula trazadora, la intensidad de radiación gama detectada por los detectores de NaI es función de la distancia entre la fuente y el detector, del ángulo sólido (ángulo espacial con el que un detector “ve” a la partícula 55 trazadora) y de la composición del medio que se encuentra entre la partícula y el detector a lo largo del camino del rayo gama. Este medio se refiere a la emulsión multifásica pero también a todo lo que se interponga entre la fuente y el detector, incluyendo la pared de la columna. En la Figura II.4.2.6 se muestra un esquema que describe la situación. El número de cuentas recibidas por los detectores es función de la posición de la partícula dentro de la columna, por esta razón, se realiza la calibración, para obtener la relación entre la intensidad de la radiación detectada y la posición de la partícula. Este mapa de calibración relaciona la intensidad medida con la posición para cada detector. Luego, con las intensidades medidas durante los experimentos de RPT se resuelve el problema inverso de calcular la posición instantánea de la partícula. Para este fin se utiliza algún algoritmo de reconstrucción inversa adecuado, según el sistema de estudio y el equipamiento disponible. Hasta el año 1996, Chaouki, Larachi y Duduković, pioneros en la implementación de la técnica de RPT, escribían en su libro “Non Invasive Monitoring of Multiphase Flows” que hasta el momento se disponía de tres métodos (algoritmos) para la identificación de la posición de la partícula en un experimento de RPT: esquema de reducción de datos, aquellos basados en modelos de Monte Carlo, modelos basados en redes neuronales. En la siguiente década estos métodos han sido mejorados y se ha agregado a la lista un método presentado por Bhusarapu (2005) que se basa en hacer coincidir la función de correlación cruzada. Algoritmos de reconstrucción Esquema de reducción de datos Este es el método que fue utilizado en los trabajos de Lin et al. (1985); en el CREL fueron desarrollados por Devanathan (1991) en principio y mejorados por Degaleesan (1997). En este método, se asume que la intensidad de la radiación o cuentas recibidas por un detector solamente es proporcional a la distancia entre el centro del cristal del detector y la ubicación del trazador (como el trazador es generalmente 56 pequeño, se asume una fuente puntual). La base del método reside en transformar el mapa de intensidad de cuentas versus posición de la partícula en una curva bidimensional posición de la partícula–distancia al detector versus intensidad de cuentas, para cada uno de los detectores. El algoritmo desarrollado por Degaleesan (1997) consistía en un proceso de reconstrucción de dos pasos donde, en el primero, el conjunto de datos de calibración se utilizaba para ajustar las curvas de calibración distancia versus cuentas con un ajuste de una spline cúbica para cada detector. Luego, la distancia entre cada detector y la posición dinámica de la partícula se calculaba utilizando el conjunto correspondiente de coeficientes de ajuste spline cúbicos. Finalmente, la posición de la partícula era calculada utilizando un ajuste por cuadrados mínimos no lineal para el sistema de N detectores. Más detalles sobre la estructura de este algoritmo se encuentran en los trabajos de tesis de Rados (2003) y/o Degaleesan (1997). Este método ha dado buenos resultados cuando las contribuciones del ángulo sólido, la composición de la columna y la influencia del espesor de la pared sobre la intensidad de las cuentas registradas son despreciables, o siguen la tendencia de la contribución de la distancia. En estos casos, las curvas de calibración resultan una curva bien definida. Cuando la contribución de estos factores es mayor la curva de calibración se parece más a una “banda” de calibración (Rados, 2003). Este método no es apropiado para suspensiones densas, debido a la suposición de que las cuentas adquiridas dependen solamente de la distancia partícula–detector y son independientes de la geometría del sistema, atenuación del medio y el ángulo sólido. Rados (2003) desarrolló un nuevo algoritmo que describe mejor la distribución local de atenuación. La diferencia fundamental es que en el primer paso el conjunto de datos de calibración es utilizado para obtener el ajuste spline beta de la curva distancia versus cuentas. Utiliza el spline beta en vez del spline cúbico porque de esta manera, al ajustar el orden del spline y el número de coeficientes se tiene más control sobre el ajuste (Rados, 2003). Para más detalles sobre el algoritmo los lectores deberán referirse a Rados (2003). 57 Estas modificaciones permitieron que el algoritmo pudiera ser aplicado en sistemas de acero inoxidable, a alta presión y a muy altas velocidades de gas donde la contribución del ángulo sólido, la composición de la columna y alta composición de sólidos cobran importancia (Rados, 2003). El llamado esquema de reducción de datos requiere en cualquiera de sus versiones muchos puntos de calibración (del orden de 2000 puntos, dependiendo del tamaño del reactor) que sólo pueden adquirirse con un sistema de calibración automático. A su vez, si bien en principio sólo se necesitarían 3 detectores para determinar una posición, la característica estocástica de la radiación hace que se necesite redundancia de información para obtener una mayor resolución. En particular, para este método se han utilizado entre 20 y 30 detectores para sistemas de escala piloto. Monte Carlo Este algoritmo trata de modelar la relación entre las cuentas recibidas por un detector y la posición del trazador. De acuerdo a lo propuesto por Tsoulfadinis (1983) y Moenes et al. (1981), el número de cuentas C de un fotopico adquiridas por un detector durante un intervalo de tiempo de muestreo T, emitidas por una fuente radiactiva puntual de actividad R en una posición (x,y,z) dentro de un medio denso (el reactor que se quiere estudiar, ver Figura III.4.2.6) puede expresarse con la siguiente relación: C= TνR ( φε ) 1 + τνR ( φε ) (II.4.2.1) donde R es la actividad de la fuente, v el número de rayos gama emitidos por desintegración (v = 2 para el 46 Sc y v =1 para el 198 Au); ε es la eficiencia total de detección (probabilidad de que un rayo gama emerja del reactor sin dispersión e interactúe con el detector), τ es el tiempo muerto por pulso registrado y φ es la relación cuentas del fotopico/cuentas totales. Por lo tanto, el producto φε es la eficiencia de fotopico o la eficiencia total de pico. La eficiencia está dada por la siguiente ecuación: 58 ε=• ∫∫ Ω r.n exp ( −µ R eR − µ W e W ) (1 − exp ( µ D d ) ) dΣ r3 (II.4.2.2) donde r es la distancia entre la fuente y un punto P en la superficie externa del detector, eR es el camino recorrido por el rayo gama dentro del reactor, eW es el camino recorrido por el rayo a través de la pared del reactor y d es el espesor del cristal en la dirección determinada por el vector r (ver Figura II.4.2.6). Ω es el ángulo sólido formado entre la superficie del detector y la fuente y n es un vector unitario perpendicular a dΣ. µR, µW y µD son los coeficientes de atenuación lineal del medio, de la pared y del material del detector respectivamente. µR, µW, µD y φ dependen de la energía de los rayos gama incidentes. En la ecuación II.4.2.1, la contribución de las cuentas del fondo se desprecia con respecto al tiempo muerto. Los rayos gama provenientes de la dispersión Compton en el reactor no se consideran porque no contribuyen a las cuentas del fotopico. En cambio, contribuyen al tiempo muerto, pero su omisión del denominador de la ecuación II.4.2.1 se justifica porque la corrección por tiempo muerto es alta sólo cuando la fuente esta muy cerca del detector, que es una condición para la cual predomina fuertemente la cantidad de rayos gama que no provienen de la dispersión. Figura II.4.2.6. Esquema de un detector de NaI(Tl) y el trazador dentro de una columna en estudio. Extraído de Chaouki et al. (1997). 59 La expresión para la eficiencia del detector dada por la ecuación II.4.2.2 es una integral de superficie bidimensional, difícil de estimar (Roy et al, 2002). En primer lugar, no se tiene información a priori acerca del ángulo sólido en sí mismo (límites en la integral en un espacio de 3 dimensiones) y en segundo lugar, la penetración del fotón en el cristal del detector, viajando a lo largo de “cada rayo” dentro del ángulo sólido, no es conocida. Por lo tanto, es necesario utilizar algún método numérico para evaluar la integral, y así, las cuentas adquiridas en el detector en función de la distancia relativa desde la partícula trazadora. Un método posible para estimar el ángulo sólido, la eficiencia (Ec. II.4.2.2) y las cuentas de fotones es un algoritmo que utilice simulaciones de Monte Carlo. En este algoritmo, los fotones son generados al azar en la fuente, se siguen sus recorridos individuales entre la fuente y los detectores. Los cálculos llevan a aproximaciones de dos cantidades: el ángulo sólido Ω y la profundidad de penetración d en el cristal del detector. Por lo tanto, se obtiene una aproximación de la eficiencia total del detector ε. La eficiencia del fotopico se estima a partir de correlaciones (Avignone and Jeffreys, 1981). Luego, se estiman las cuentas (Ec. II.4.2.1) para cada posición de la partícula trazadora y posición del detector. Este modelo fue implementado por varios autores (Larachi et al., 1994, Yang, 1997; Gupta, 2002) con algunas variantes entre si, con el objetivo de utilizar un modelo de reconstrucción que tuviera en cuenta la geometría del sistema y los efectos de la radiación. Larachi et al. (1994) y Gupta (2002) utilizaron un modelo para las cuentas del fotopico propuesto originalmente por Tsoulfanidis (1983). El cambio en la atenuación del medio debido al flujo fue considerado constante (Larachi et al., 1994) o estimado utilizando un perfil de hold up promediado en el tiempo (Gupta, 2002). De todos modos, en general, el método ha sido utilizado en ocasiones donde los efectos de la pared del reactor y del flujo son apreciables y es necesario tener en cuenta los efectos del ángulo sólido (Ong, 2003), o en situaciones donde no se cuenta con un equipo de calibración automático y no es posible o no se quieren tomar miles de posiciones de calibración (Gupta, 2002), o en situaciones donde sólo es posible tomar pocas posiciones de calibración y no se cuenta con demasiados detectores (Larachi et al., 1994). 60 Cabe destacar que el método de Monte Carlo es muy sofisticado y por lo tanto demanda mucho tiempo de cómputo. Redes Neuronales El tercer método trata de capturar la dependencia de la intensidad de la radiación con la posición con un modelo de caja negra, utilizando una red neuronal (Godfroy et al., 1997). En este método, una parte de los datos de la calibración se utiliza para entrenar la red a fin de estimar las constantes de la red neuronal y ganar confianza utilizando los datos que sobran de la calibración para testear la resolución alcanzada. La desventaja de este método es que el modelo que se utiliza no tiene ningún significado físico y emplea un gran número de parámetros de ajuste (~ 160) lo que puede restringir la aplicabilidad del modelo a un rango muy limitado. De todas formas, el método puede ser utilizado para la visualización en tiempo real de las trayectorias. Función de correlación cruzada Este enfoque fue planteado y desarrollado por Bhusarapu (2005) para resolver el problema inverso de la reconstrucción de la partícula en un experimento de RPT. Bhusarapu (2005) combina un criterio de localización de la posición de la partícula trazadora basado en la función de correlación cruzada y un modelo que relaciona las cuentas adquiridas por el detector a partir de la fuente emisora en la posición de la partícula emisora que tiene en cuenta la geometría y efectos de la radiación. Uno de los beneficios de este algoritmo es que no necesita muchos puntos de calibración (del mismo orden que Monte Carlo) pero adicionalmente no necesita, como en el caso de Monte Carlo, que se modele la geometría del reactor, con lo cual es aplicable a sistemas de geometrías diversas. Ventajas y desventajas de los algoritmos disponibles al momento En el caso de contar con un equipo de calibración automático que permite la toma de miles de posiciones de calibración y también con muchos detectores (más de 61 15, dependiendo del tamaño de la columna), es probable que sea una buena opción utilizar el algoritmo propuesto por Rados (2003), “beta spline”. Si bien este algoritmo no tiene en cuenta más que la relación distancia–cuentas para cada detector, el cómo se realiza el ajuste permite la aplicación del mismo aún para medios muy densos o columnas de acero inoxidable. Pero este algoritmo tendrá deficiencias si no se cuenta con redundancia de datos, es decir, muchas posiciones de calibración (fue probado con 2600) y varios detectores (20). A su vez, es el más económico desde el punto de vista computacional. Dado el caso de tener que realizar la calibración en forma manual, no podrán tomarse más de cientos de puntos (dependiendo del volumen del reactor). En este caso el “beta spline” desarrollado por Rados (2003) ya no es adecuado ya que no contará con información suficiente para interpolar puntos intermedios. En estos casos, un modelo fenomenológico como Monte Carlo es una buena opción. Otra opción para este caso es el algoritmo semiempírico de Bhusarapu (2005). Dadas las características del equipo de RPT desarrollado durante esta tesis se utilizaron los algoritmos Monte Carlo desarrollado por Larachi et al. (1994) y el desarrollado por Bhusarapu (2005), Cross Correlation. En el Apéndice A se explican en detalle los dos algoritmos utilizados. Fuentes de error en un experimento de RPT Rados (2003) describió las distintas causas de error a los que está sujeto un experimento de RPT: • Naturaleza estocástica de la radiación gama. • Ruido electrónico • Fluctuaciones del hold up. • Error experimental • Error sistemático debido al movimiento (Dynamic bias) • Algoritmo de reconstrucción 62 Estos errores pueden afectar de manera importante la precisión de un experimento de RPT y por lo tanto, es importante considerarlos cuidadosamente y tener una estimación, por lo menos, semi-cuantitativa de los mismos. A continuación se realiza una explicación de cada uno de ellos. Error debido a la naturaleza estocástica de la radiación gama Esta fuente de error está directamente relacionada con las emisiones de fotones gama que surgen del decaimiento de una fuente radiactiva (partícula radiactiva). La misma es causada por la forma gaussiana/poisson de la distribución del número de fotones emitidos por la fuente. Su magnitud puede ser relacionada con la inversa de la relación señal/ruido: 1 C . Este error se refleja en la incertidumbre que se presenta al detectar el número de cuentas promediadas en el tiempo recogidas por un determinado detector durante el corto tiempo en el que se realiza el scanning dinámico (<< 1 s). Por su naturaleza este error causa un ruido aleatorio, sin correlación. Este error se explica parcialmente por la función peso (w) del detector y es pequeño cuanto más cerca se usen los detectores. Error debido al ruido electrónico El ruido electrónico es causado por los componentes que procesan la señal electrónica. Este error, causa también un tipo de ruido aleatorio, sin correlación en la señal. Para minimizarlo, los contactos eléctricos deben estar en buen estado y el equipamiento debe mantenerse sin calentamiento a alguna temperatura constante. Ambos errores, los debidos a la naturaleza estocástica de la radiación gama y al ruido eléctrico pueden ser altamente filtrados durante el proceso de filtrado desarrollado por Degaleesan (1997). 63 Error debido a las fluctuaciones en el hold up Durante la etapa de calibración se obtienen varios cientos de cuentas (300 en los experimentos de esta tesis) a partir de una sola posición estática del trazador (punto de calibración estático). Durante este tiempo el detector recibe un número suficiente de cuentas a alguna frecuencia típica entre 20 y 50 Hz. Luego, para obtener las cuentas correspondientes a ese punto de calibración estático, se promedian las 300 cuentas en nuestro caso. En promedio, la intensidad de radiación detectada esta atenuada en el tiempo en el que se tomaron las 300 cuentas por la composición del medio en la columna durante el tiempo que requiere la medición de las 300 cuentas. En contraste, cuando se realiza un experimento y el trazador se mueve dinámicamente dentro de la columna, los perfiles de hold up dentro de la columna pueden ser significativamente diferentes de los perfiles promediados que se obtienen en el proceso de calibración. Por ejemplo, si durante un barrido (scaneo) de la partícula en movimiento, hay comparativamente más gas que el hold up promediado en el tiempo a través del camino que tiene que atravesar la radiación hasta llegar al detector, el número de cuentas recibidas por este será mayor. Rados (2003) establece que este error causa probablemente algún tipo de señal caótica correlacionada en la escala de tiempo, que es por lo menos un orden de magnitud mayor que la duración de un simple barrido. Este error es mayor para los detectores que están más cerca y es en alguna medida disminuido durante el proceso de filtración propuesto por Degaleesan (1997). Rados (2003) establece que se necesita un mayor entendimiento de esta fuente de error. Error Experimental Este tipo de error puede ser debido a una pobre alineación de los detectores o un impreciso posicionamiento de la partícula trazadora durante la calibración estática. 64 Error sistemático debido al movimiento (Dynamic bias) Este es un error causado por la duración finita de un barrido de RPT. No importa cuán alta sea la frecuencia la adquisición de datos, durante el tiempo de barrido el trazador se mueve una distancia finita. Debido al movimiento de la partícula la distancia entre el trazador y los detectores y consecuentemente la velocidad de recepción de las cuentas por medio de los detectores se encuentra cambiando constantemente. La posición de la partícula trazadora, que se reconstruye utilizando el número total de cuentas recibidas por los detectores durante un barrido simple puede no corresponder con la posición promedio del trazador durante ese mismo barrido. Esta fuente de error incrementa su importancia cuando la distancia recorrida por la partícula trazadora durante el barrido es considerable, o sea, cuando la velocidad de la partícula trazadora es muy alta (por encima de 1 m/s, Rammohan et al. (2001)). Las velocidades de partículas trazadoras encontradas en experimentos en columnas de burbujeo se encuentran significativamente por debajo de este valor. Este error es mucho más importante en experimentos de RPT que se llevan a cabo en tanques agitados (stirred tanks) o risers gas-sólido. Error debido al algoritmo de reconstrucción El uso de algoritmos de reconstrucción inapropiados también puede ser una fuente de error. El algoritmo utilizado puede no estar utilizando completa o correctamente la información de atenuación obtenida durante la calibración. El error generado debido al algoritmo de reconstrucción generalmente está correlacionado y puede estar sesgado o ser tendencioso. 65 66 CAPITULO III Parte experimental III. 1. IMPLEMENTACIÓN DEL EQUIPO DE FLUJO MULTIFÁSICO PARA EL DESARROLLO DE TÉCNICAS NO INVASIVAS DE ANÁLISIS Se diseñó un equipo que pudiera ser utilizado como columna de burbujeo o lecho fluidizado trifásico de escala piloto para ser empleado en el desarrollo, verificación y aplicación de técnicas de análisis no invasivas para sistemas multifásicos. El equipo diseñado consiste en una columna de acrílico de 0.102m de diámetro interno y 1.10m de alto; consta de un separador gas-líquido en el tope de la columna. En caso de querer operarse con recirculación de líquido, el mismo se recircula a un reservorio mientras que el gas se ventea. El tope de la columna se prolonga 0.10m con una malla de nylon de 250µm para evitar la eventual pérdida de sólidos. Se trabajó especialmente en el diseño del distribuidor gas/líquido ya que, en los reactores multifásicos, es uno de los aspectos más importantes (Lee et al., 2001). Un buen distribuidor debe introducir finas burbujas de gas y distribuirlas, junto con el líquido, en toda la sección transversal, previniendo que los sólidos tapen la entrada y minimizando la pérdida de carga. En el distribuidor diseñado, el gas y el líquido ingresan separadamente, pero al mismo nivel, según lo sugerido por Lee et al. (2001). El líquido ingresa a través de un lecho de 0.102m de diámetro interno y 0.15m de alto, empacado con bolitas de vidrio de 5mm de diámetro. Luego atraviesa un plato perforado con 50 orificios de 4mm de diámetro uniformemente distribuidos. El gas se introduce separadamente mediante un arreglo de seis tubos conectados vía un tubo central que lo distribuye. Los tubos contienen, hacia arriba, 56 orificios de 1mm de diámetro. El distribuidor de gas está soldado al plato perforado distribuidor de líquido. 67 La columna tiene 8 filas de 5 orificios equidistantes de ¼´´ NPT que permiten introducir caños de aluminio de 6.5mm de diámetro externo y 1mm de espesor para insertar una varilla de acrílico, en la punta de la cual se ubicará un trazador radioactivo, con el objetivo de realizar la calibración para los experimentos de RPT. Los orificios empiezan 0.05 m por encima del distribuidor gas/líquido y están separados por intervalos de 0.1 m. En la Figura III.1.1 y III.1.2 se muestra un croquis del distribuidor diseñado y de la columna, respectivamente. En la Figura III.1.3 se muestra una foto de una parte de la columna donde se pueden observar en detalle tres de las filas de orificios por los que se introducen los caños de aluminio para realizar la calibración. Figura III.1.1. Descripción del distribuidor gas-líquido diseñado para la columna de burbujeo/ lecho fluidizado. 68 Figura III. 1.2. Esquema de la columna de burbujeo/lecho fluidizado montado para el desarrollo, verificación y aplicación de técnicas de análisis no invasivas, principalmente RPT. 69 Figura III.1.3. Ilustración de los orificios de la columna por donde se introducen los tubos de aluminio para la calibración estática que debe realizarse en experimentos de RPT (ver sección III.3.3 y 3.4). III. 2. DENSITOMETRÍA En este capítulo se presenta un método no invasivo y fácil de implementar para diagnosticar transiciones de régimen de flujo en columnas de burbujeo sin necesidad de interrumpir la operación de las mismas. El método, denominado Densitometría, se basa en la respuesta de detectores de centelleo frente a la exposición de una fuente radiactiva externa, localizada cerca del equipo en cuestión. Los detectores capturan parte de los fotones de rayos gama que logran atravesar la emulsión gas-líquido. A partir de la observación y análisis de las series temporales de fotones detectados por los detectores, se estudian algunos cuantificadores que caracterizan las funciones de densidad de probabilidades del número de fotones, y el grado de apartamiento de las mismas de la distribución normal. Estos parámetros constituyen un método para diagnosticar una transición de régimen de flujo. Con el objetivo de establecer las condiciones para las cuales el método diera los mejores resultados, se estudiaron la influencia de la energía emitida por los radioisótopos, frecuencia de muestreo y localización de la fuente con respecto al detector. Los experimentos se realizaron en la columna de burbujeo descripta en la sección III.1. Se utilizó agua en batch y aire filtrado como sistema fluidodinámico. El 70 gas fue variado a velocidades entre 0.02 y 0.13 m/s, con el objetivo de explorar condiciones en los regímenes homogéneo y heterogéneo. También se tomaron muestras para las condiciones estáticas extremas: columna vacía y llena de agua (ug = 0m/s). A juzgar por inspección visual, la transición de régimen de flujo tenía lugar alrededor de 0.06m/s. Este resultado es consistente con resultados de la literatura para este tipo de sistemas (Kantarci et al., 2005; Letzel et al., 1997). El equipo de Densitometría consiste en un arreglo de 1 ó 2 detectores de centelleo de NaI(Tl) colocados en condiciones estratégicas, de tal forma de captar la radiación gama emitida por una fuente radiactiva ubicada en alguna posición cerca de la columna. En la Figura III.2.1 se muestra la imagen de una de las configuraciones estudiadas. Figura III.2.1. Fotografía de una de las configuraciones fuente-detectores estudiada. Cada detector (D) consiste en un cristal de NaI(Tl), acoplado a un fotomultiplicador (FM). La radiación incidente al interactuar con el cristal genera una señal luminosa, la cual es transferida a través de una guía de luz al fotomultiplicador, donde es convertida y multiplicada en una señal eléctrica. El mismo necesita ser alimentado por alta tensión. El FM está conectado a un amplificador rápido (Quad Timing Filter Amplifier (TFA) ORTEC 863) y éste, a su vez, conectado a un discriminador de fracción constante óctuple (Octal Constant Fraction Discriminator (CFD) LeCroy 623B). La salida de este último está conectada a un generador de retardos óctuple (Gate and Delay Generator (GDG) ORTEC 66810). Estos tres módulos conforman el bloque de módulos NIM que genera señales analógicas. A la salida del GDG las señales lógicas son transformadas en analógicas en el bloque de 71 módulos CAMAC, compuesto por un contador de pulsos Scaler LeCroy 2551, la interfaz a la PC y el reloj (Real Time Clock (RTC) DSP 018) que le indica al contador de pulsos cuál es la frecuencia de adquisición deseada. En la Figura III.2.2 se muestra un esquema de la electrónica del sistema. CAMAC NIM HV D FM TFA CFD GDG Scaler Interfaz PC PC RTC Figura III.2.2. Esquema de la electrónica y sistema de adquisición de datos del sistema utilizado en los experimentos de Densitometría. Para cada condición experimental examinada, se registró el número de fotones a diferentes frecuencias de muestreo: 100Hz, 50Hz, 33Hz, 20Hz y 10Hz, durante 30 minutos, con tres fuentes de distinta energía: baja, intermedia y alta. Se comenzó a trabajar con una fuente que emite rayos gama de baja energía ya que se creía que de esta forma se tendría una mejor visualización del fenómeno debido a la mayor sensibilidad de la radiación de baja energía para interactuar con la materia. La fuente utilizada fue de 241Am con 2mCi de actividad (emite rayos gama de 26 y 60 keV principalmente). Dado que el número de fotones detectados por cada detector depende de la distancia a la fuente y la atenuación del medio que se interpone entre ellos, para esta fuente en particular, se estudió el efecto que provocaba modificar la ubicación de la misma. Las dos configuraciones estudiadas para el 241 Am se muestran en la Figura III.2.3. 72 (a) C1 (b) C2 Figura III.2.3. Esquema de las configuraciones estudiadas (a) C1, (b) C2 En la configuración denominada C1, la fuente está colocada enfrentada al detector 1 y la distancia entre ellos es de 10cm. La distancia efectiva entre la fuente y el detector 2 en la configuración C1 es de 31cm. En la segunda configuración estudiada (C2), la fuente está colocada a la misma distancia con respecto a ambos detectores, es decir, una distancia efectiva de 18cm para ambos. Al atravesar una distancia mayor, es esperable obtener un efecto más promediado del comportamiento de las burbujas, lo que sería esperable encontrar en equipos de mayor tamaño. Con el objetivo de extrapolar en cierta forma el método a equipos más grandes es que se estudió el efecto de utilizar fuentes de energías más altas. Con este objetivo se utilizó 198 Au (emite rayos gama a 412keV) y 46Sc (emite rayos gama a 890 keV y 1120 keV); ambas fuentes de actividad aproximada entre 30µCi – 40µCi. Adicionalmente, para las fuentes utilizadas que emiten rayos gama de dos energías (241Am y 46 Sc), se estudió la influencia sobre el método de capturar los fotones provenientes de ambos picos o restringiendo la ventana energética de tal forma de contabilizar los fotones de sólo uno de ellos. Para los experimentos con 198Au y 46Sc se utilizó el detector 1 de la configuración C1. En todos los casos, para el análisis se utilizaron series temporales del número de fotones de 15000 puntos. 73 III.3. RADIOACTIVE PARTICLE TRACKING Como se describió en la revisión bibliográfica, la técnica conocida como Radioactive Particle Tracking (RPT) consiste en determinar instantáneamente la posición de un trazador que representa una de las fases condensadas (sólido o líquido) en movimento dentro del equipo multifásico. Dicha posición se determina mediante un conjunto de detectores externos al equipo (ver sección II.4.2). A continuación se describen las distintas partes del sistema implementadas en el Centro Atómico Constituyentes (CAC) de la Comisión Nacional de Energía Atómica (CNEA) como parte de esta tesis. III.3.1. DETECTORES Y ELECTRÓNICA ASOCIADA Una parte esencial del equipo de RPT desarrollado en el Laboratorio Tandar del Centro Atómico Constituyentes (CAC), es el sistema de conteo de pulsos captados por los detectores y el procesado de los mismos. El equipo está compuesto por detectores de centelleo de NaI(Tl) de 2x2’’ y/o 3x3’’ (8 ó 10 en total según la configuración), con fotomultiplicadores acoplados. El sistema consta de dos bloques de módulos principales: el bloque de módulos NIM (Nuclear Instrument Module) que aloja los módulos electrónicos conectados a los detectores, para conformar la señal detectada por estos últimos; y un sistema controlado por el bloque de módulos CAMAC (Computer Automated Meassurement And Control), para conformar la señal digital. Este último tiene el objetivo de hacer de interfaz y transferencia de información entre la electrónica nuclear y la PC. Los detectores de NaI(Tl) tienen fotomultiplicadores (FM) acoplados que convierten y preamplifican la señal luminosa producida en el cristal. En estos detectores la luz visible hace las veces de intermediario entre la radiación incidente en el cristal centellador y el pulso electrónico saliente del fotomultiplicador. El proceso de detección que se produce en el sistema centellador-fotomultiplicador se puede resumir como sigue: (1) La radiación incidente (rayos γ) interacciona con átomos y moléculas del cristal centellador excitándolos. (2) Los estados excitados se desexcitan emitiendo luz 74 en la región del visible y cercana; este proceso se denomina fluorescencia. (3) La luz, atravesando un acople óptico, llega a una superficie fotosensible del fotomultiplicador arrancando fotoelectrones de la misma. ( 4) Los fotoelectrones se aceleran y se multiplican en etapas sucesivas formando un pulso eléctrico a la salida del tubo fotomultiplicador . En este proceso los electrones son multiplicados y focalizados por una serie de electrodos llamados dínodos (típicamente entre 10 y 14). Estos electrodos necesitan ser alimentados con alta tensión, estando conectados a través de una serie de divisores de tensión, alcanzando una diferencia de potencial típica entre dínodos adyacentes de unos 100V. Los acoples entre los centelladores utilizados y los fotomultiplicadores son de dos modos diferentes. En el caso de los detectores NaI(Tl) de 2’’, el fotomultiplicador se encuentra colocado en contacto directo con el cristal. En el caso de los detectores de 3’’, el acoplamiento al fotomultiplicador es a través de una guía de luz. Los FMs están conectados a amplificadores rápidos, Timing Filter Amplifiers (TFA), que amplifican los pulsos de salida de los FMs. Dado que las señales que son extraídas de los FMs no siempre son óptimas para alcanzar una buena resolución temporal, antes de ser procesadas con un discriminador temporal, las mismas requieren normalmente amplificación. También puede necesitarse una mejora en la forma de la señal, con el objetivo de minimizar la contribución del ruido a la resolución temporal. En nuestro equipo esta función la cumplió el TFA ORTEC 863. Este es un módulo que incorpora cuatro TFA en un solo módulo NIM y se muestra en la Figura III.3.1.1 (a). Se utilizaron 2 ó 3 de estos módulos según las configuraciones utilizadas de 8 ó 10 detectores. La señal de salida del TFA, se convierte en la señal de entrada a un discriminador. Un discriminador genera pulsos lógicos precisos en respuesta a señales de entrada que exceden un umbral preestablecido. El umbral es un voltaje específico de interés, que puede corresponder a un nivel crítico de ruido o a una cantidad física como una energía. En nuestro caso el umbral se correspondía con la energía de la fuente utilizada. Los pulsos de salida son de amplitudes estándar y proporcionales a la señal de entrada. La señal de salida de un discriminador se utilizó para generar los pulsos que serían contados. Para esta función se utilizó un Discriminador Octuple (OD, Octal Discriminator) LeCroy 623B. El mismo tiene 8 discriminadores para tratar las señales 75 de 8 detectores. Se utilizaron 1 ó 2 de estos módulos según las configuraciones de 8 ó 10 detectores. El OD Lecroy 623B se muestra en la Figura III.3.1.1 (b). La salida del discriminador está conectada a un generador y retardador de pulsos (Gate and Delay Generator - GDG). Cada canal del mismo acepta un pulso rápido negativo lógico como señal de entrada. La señal de salida es un pulso de idénticas características pero con un período de retardo preestablecido. En nuestro sistema se utilizó un GDG óctuple ORTEC GG8010, que puede observarse en la Figura III.3.1.1 (c). (a) (b) (c) Figura III.3.1.1. Módulos electrónicos instalados en el bloque NIM: (a) ORTEC 863, Quad Timing Filter Amplifier; (b) Lecroy 623B, Octal Discriminator; (c) ORTEC GG8010, Octal Gate and Delay Generator. Los componentes descriptos hasta aquí y que se muestran en la Figura III.3.1.1, son los integrantes del bloque de módulos NIM. A continuación de este bloque le sigue 76 el bloque de módulos CAMAC. Este bloque está compuesto por un contador de pulsos (Scaler), un reloj y la interfaz con la PC. Los pulsos de salida del GDG son contados en un contador de pulsos Scaler Lecroy 2551 de 12 canales con una frecuencia de 100 MHz. Cada circuito de entrada es capaz de responder a señales lógicas de nivel NIM. El reloj (Real Time Clock, RTC, DSP 018) es quien le indica al contador de pulsos el lapso de tiempo durante el cual debe contar y cuándo reiniciar el contaje (0.03s, en el caso de nuestros experimentos). Luego, el contador de pulsos (Scaler), es conectado a la interfaz con la PC (controlador CAMAC CC32), donde se graban las cuentas medidas simultáneamente por todos los detectores durante los experimentos. Los módulos que integran el bloque CAMAC se muestran en la Figura III.3.1.2. (a) (b) (c) Figura III.3.1.2. Módulos electrónicos instalados en el bloque CAMAC: (a) Scaler LeCroy 2551; (b) Interfaz de PC, controlador CC32; (c) RTC 018, Reloj de Tiempo Real. 77 En la Figura III.3.1.3 se muestra un esquema de la electrónica para la configuración de 8 detectores. HV CAMAC NIM D1 FM TFA CFD GDG Scaler D2 FM TFA CFD GDG Scalerr D3 FM TFA CFD GDG Scaler D4 FM TFA CFD GDG Scaler D5 FM TFA CFD GDG Scaler D6 FM TFA CFD GDG Scaler D7 FM TFA CFD GDG Scaler D8 FM TFA CFD GDG Scaler Scaler RTC Scaler Scaler Scaler PC Interfaz CC32 Figura III.3.1.3. Esquema de la electrónica el equipo de RPT implementado en el Laboratorio Tandar del Centro Atómico Constituyentes para la configuración de 8 detectores. III.3.2. PREPARACIÓN DE LOS TRAZADORES Un punto crucial para la realización de los experimentos de RPT es la construcción del trazador radiactivo. En el caso de seguir el movimiento de sólidos, el 78 trazador debe ser análogo a las partículas que se quieran trazar, en forma, tamaño y densidad. Si el objetivo es determinar el movimiento del líquido, se debe producir una partícula trazadora cuya densidad sea igual a la de esta fase y lo más pequeña posible, a fin de que siga las líneas de corriente. Si bien en esta tesis no se realizaron experimentos en lechos fluidizados, en principio desarrollamos la técnica para la construcción de un trazador sólido. Para la construcción del mismo se mandó a perforar una de las bolitas de vidrio de 3mm, que integrarían la fase sólida de un lecho fluidizado. Dada la dureza del vidrio se requirieron fresas con punta de diamante. Luego, se introdujo aproximadamente 1mg de Sc2O3 dentro de la bolita. Para tapar el agujerito de la bolita, con el objetivo de que el material introducido no pudiera salir, se evaluaron distintos productos adhesivos. La Poxilina ® 10 min resultó una buena opción para sellar el trazador. Se comprobó la buena adherencia al vidrio y se realizó un análisis de absorción atómica sobre las cenizas de la Poxilina® para examinar si existía algún elemento entre los excipientes de la misma que pudiera activarse durante el bombardeo de neutrones al que es expuesta la bolita durante la activación del escandio. Paralelamente se mandaron a activar una bolita de Poxilina® y una de vidrio con el mismo objetivo. Se obtuvieron los espectros de ambas bolitas activadas y se llegó a la conclusión de que la Poxilina® no tenía ningún elemento “activable” entre sus excipientes. El sodio que contiene el vidrio se activa por el bombardeo neutrónico a 24 Na, con vida media de aproximadamente 15hs. Luego, se debe esperar algunos días para su decaimiento antes de la realización de los experimentos. La Poxilina® fue utilizada en adelante para el sellado de todos los trazadores preparados donde era necesaria una encapsulación. El hecho de haber encontrado Na en el vidrio cómo único elemento activable abre la posibilidad de utilizar sólo vidrio como trazador en situaciones en las cuales se pueda emplear una fuente de vida media corta, para experimentos de RPT que no duren demasiado tiempo. Para los experimentos de calibración estática y calibración dinámica que se diseñaron para verificar el sistema de RPT implementado y se describirán en la secciones III.3.3 y III.3.4, se diseñaron partículas fáciles de maniobrar dado que no se necesitaba que tuvieran las características de ninguna fase en particular. Se utilizó una partícula de PVC de forma cilíndrica, de 5mm de diámetro y 5mm de longitud; la 79 misma fue agujereada para introducir unos miligramos de polvo de óxido de escandio (Sc2O3) o astillas de oro. En ambos casos, el cilindro fue sellado con Poxilina® y limado hasta obtener el tamaño deseado. Dicho cilindro fue expuesto a bombardeo de neutrones en el reactor del Centro Atómico Constituyentes. El flujo del reactor nuclear RA1 del Centro Atómico Constituyentes es de 2·1012·n/seg·cm2. Posteriormente, se desarrolló la técnica para preparar un trazador para la fase líquida en un sistema agua – aire. La técnica más avanzada a la altura de la realización de los experimentos de esta tesis para la construcción de un trazador de líquido consiste en perforar una bolita de polipropileno de 1mm de diámetro con un orificio de 0.5mm de diámetro y poner dentro las partículas necesarias de Sc de 50µm o 100µm y luego sellar con algún pegamento de goma. Este es el procedimiento realizado por Ong (2003) que se explica en la sección II.4.2 de esta tesis. Este procedimiento, implica trabajar con una partícula activada de muy reducido tamaño e introducirla en un orificio de 0.5mm dentro de una bolita de 1mm. Por razones de seguridad, no se consideró conveniente manipular partículas radiactivas tan pequeñas, especialmente dado que el procedimiento es operativamente complicado. Por otra parte, teniendo en cuenta que la vida media del 198Au es de 2.694 días, significativamente menor que la del 46Sc, de 84 días, se decidió finalmente utilizar oro y normalizar el número de fotones medidos por cada detector a un tiempo inicial. Esto representa una ventaja en el caso que recuperar el trazador de la columna se volviera una tarea difícil. Finalmente para realizar el experimento de RPT que se describe en la sección III.3.4 se prepararon diversos trazadores introduciendo partículas de oro en extrudados de polietileno, los cuales fueron pulidos hasta alcanzar una densidad próxima a la del agua. En particular, para los resultados que se muestran en la sección IV.2.3 se utilizó una partícula como la que se muestra en la Figura III.3.1.4. Figura III.3.1.4. Partícula utilizada como trazador del agua en un experimento de RPT sobre papel milimetrado. 80 III.3.3. EXPERIMENTOS DE CALIBRACIÓN CON FUENTE DE SC Los experimentos fueron realizados en la columna descripta en III.1 (ver Figura III.1.1). La fase líquida utilizada fue agua en batch y aire de un compresor, posteriormente filtrado, como fase gaseosa. La velocidad de gas fue variada entre 0m/s y 0.12 m/s, con el objetivo de estudiar los regímenes de flujo homogéneo y heterogéneo característicos de columnas de burbujeo. Estos primeros experimentos fueron realizados utilizando 46 Sc como fuente radiactiva. El trazador radiactivo utilizado se construyó poniendo unos miligramos de Sc2O3 dentro de un cilindro de PVC como fue descripto en la sección III.3.2. El cilindro fue limado hasta obtener un tamaño adecuado para introducirlo en los tubos de aluminio que se utilizan para la calibración (ver sección III.1). Dicho cilindro fue expuesto a bombardeo de neutrones por ocho horas en el reactor del Centro Atómico Constituyentes para producir 46Sc que decae con emisión de dos fotones de energías 890 y 1120 keV. La primera configuración de detectores que se utilizó fue de 8 detectores distribuidos alrededor de la columna. Se colocaron a fin de formar dos niveles de 4 detectores, separados 90°, a 0.1m y 0.4m por encima del distribuidor, como había sido utilizado por Larachi et al. (1994). En la Figura III.3.3.1 se muestra un esquema y una foto de dicha configuración. (a) (b) Figura III.3.3.1. (a) Esquema de la configuración de detectores utilizada en los primeros experimentos de RPT; (b) Foto de la puesta experimental. 81 Para realizar la calibración estática se utilizó una varilla de acrílico a la cual se pegó la fuente radiactiva en un extremo. La varilla fue graduada cada 20mm para controlar la posición de la fuente. La fuente se introdujo dentro de los tubos de aluminio dispuestos en los orificios que tiene la columna, una fila por vez. Cada fila de la columna contiene 5 orificios y en cada uno de ellos se introdujo la fuente mediante la varilla graduada cada 20mm, con lo cual se tomaron 5 posiciones en cada uno. Dado que la columna contenía 50cm de altura de agua, se utilizaron 5 filas de orificios, correspondientes a z = 50mm, z = 150mm, z = 250mm, z = 350mm y z = 450mm. En total se ubicó la fuente en 125 posiciones de calibración estáticas. En cada posición, se adquirió el conteo simultáneo de los ocho detectores de centelleo de NaI(Tl) durante 10s a una frecuencia de 33Hz. En la Figura III.3.3.2 se pueden observar las 125 posiciones de calibración medidas para las 5 posiciones axiales. En la Tabla III.3.3.1 se muestran las condiciones de operación para las cuales se realizaron experimentos de calibración. ug (m/s) Régimen de flujo 0 Condición estática 0.02 Homogéneo 0.04 Homogéneo 0.06 Transición 0.08 Heterogéneo 0.12 Heterogéneo Tabla III.3.3.1. Condiciones de operación para las cuales se realizaron calibraciones. 82 40 40 20 20 0 -60 -40 -20 0 20 60 -40 -40 -20 0 -20 -40 -40 -60 -60 60 60 40 40 20 20 -20 0 20 40 60 40 60 z =150 mm 0 -60 -40 -20 0 -20 -20 -40 -40 -60 -60 x (m m ) 20 x (m m ) z = 50 mm 0 20 x (m m ) z =250 mm 40 60 z =350 mm 60 40 20 y (mm) -60 0 -60 -20 x (m m ) y (mm) 40 y (mm) 60 y (mm) y (mm) 60 0 -60 -40 -20 0 20 40 60 -20 -40 -60 x (m m ) z =450 mm Figura III.3.3.2. Ubicación de las 125 posiciones de calibración estática. 83 Además de la calibración estática, necesaria para la reconstrucción de la partícula en movimiento por cualquiera de los métodos de reconstrucción descriptos en la sección II.4.2, se quiso comprobar la calidad de la reconstrucción de la trayectoria cuando la partícula está en movimiento. Con este objetivo se diseñó un procedimiento de calibración “dinámico”, donde la partícula realiza un desplazamiento conocido. Con el propósito de imponer un movimiento lineal hacia arriba y hacia abajo en la dirección axial, se implementó un sistema neumático. El mismo consiste en un cilindro de aire comprimido con válvulas reguladoras. Dos válvulas regulan la dirección del sistema, mientras que otras dos regulan la velocidad de cada uno de los movimientos. El recorrido es de 20cm, que es la medida del pistón. A continuación del pistón, se adicionó una varilla de aluminio de largo suficiente como para penetrar en la emulsión bifásica. La partícula radiactiva fue posicionada en la punta de la varilla dentro de la misma. La varilla fue desplazada a diferentes velocidades, en un rango de 0.1m/s a 1m/s, viajando 20cm hacia arriba y hacia abajo cerca del centro de la columna. En las Figuras III.3.3.3 y III.3.3.4 se muestra en detalle el sistema neumático diseñado. (a) (b) Figura III.3.3.3. Sistema de aire comprimido diseñado para imponer un movimiento lineal ascendente y descendente en la dirección axial. (a) Sistema de válvulas reguladoras de la velocidad. (b) Sistema de válvulas reguladoras del movimiento ascendente y descendente. 84 (a) (b) (c) Figura III.3.3.4. Sistema de aire comprimido diseñado para imponer un movimiento lineal ascendente y descendente en la dirección axial. (a) Varilla de aluminio adosada a continuación del pistón del cilindro. (b) Punta de la varilla donde se ubicó el trazador. (c) Varilla de aluminio dentro de la emulsión bifásica. Dado que el sistema de válvulas es neumático, el movimiento del pistón debió ser determinado por alguna otra técnica para calcular la velocidad de la fuente. Con este fin, se filmó el recorrido del pistón con una videocámara (15 cuadros por segundo) para las distintas velocidades estudiadas. Luego, las imágenes fueron procesadas para poder obtener las velocidades de calibración. III.3.4. EXPERIMENTOS DE CALIBRACIÓN CON FUENTE DE AU Cuando se llevaron a cabo los experimentos con la fuente de 198Au se realizaron algunas modificaciones a la instalación montada para los experimentos con 46 Sc. En primer lugar los experimentos se realizaron en un laboratorio propio y exclusivo para el sistema desarrollado de RPT en el Centro Atómico Constituyentes. Este hecho permitió acondicionar el laboratorio para evitar tener que desmontar el equipo y optimizar los procedimientos de seguridad. Para los experimentos con 198Au, se montó una pared con ladrillos de concreto que rodea toda el área donde se producen emisiones radiactivas, 85 separando la zona de experimentos de la de control. En la Figura III.3.4.1 se muestran fotografías de las instalaciones utilizadas para los experimentos con 198Au. (a) (c) (b) (d) Figura III.3.4.1. Fotografía de las instalaciones de RPT utilizadas para los experimentos con Au. (a, b) Columna de burbujeo y arreglo de detectores. (c,d) Sistema de control electrónico de los detectores. 198 Para la realización de los experimentos de calibración con la fuente de 198 Au se adicionaron anillos de acrílico alrededor de la columna para proporcionar un mayor apoyo a los detectores y así poder hacer más fácil y reproducible el posicionamiento y la medición de la posición de los mismos. Los anillos de acrílico se observan en la Figura III.3.4.2 (a) y (b). 86 (a) (b) Figura III.3.4.2. Detalle de los aros de acrílicos adicionados al sistema de RPT para mejorar el apoyo de los detectores. Con la fuente de 198 Au, se realizaron experimentos de calibración dinámica y estática en distintas condiciones experimentales: se utilizaron distintas configuraciones de los detectores y distintos algoritmos de reconstrucción para determinar la posición del trazador. En algunos casos se cambió la actividad de la fuente de 198Au. En primer lugar se realizaron calibraciones en condiciones estáticas con la columna llena de agua (ug = 0m/s) en tres configuraciones diferentes de detectores: 1. Configuración A: 8 detectores en dos niveles (0.10 m y 0.49 m) dispuestos a 90° uno del otro. Esta es la misma configuración que se había utilizado para los experimentos de Sc en la sección III.3.3. 2. Configuración B: 8 detectores dispuestos en hélice: cuatro filas de dos detectores cada una enfrentados entre si. De una fila a la otra los detectores están girados en 90°. La configuración se muestra en la Figura III.3.4.3. 87 3. Configuración C: 10 detectores, dos filas de 8 detectores dispuestos como en la Configuración A, más dos detectores intermedios en z dispuestos como se muestra en la Figura III.3.4.4. Figura III.3.4.3. Configuración B utilizada para realizar experimentos de calibración estática con la fuente de 198Au. La configuración C fue montada con el objetivo de estudiar simultáneamente si es posible obtener información aproximada de la posición axial del trazador analizando los datos brutos de intensidades medidas por los cuatro detectores alineados verticalmente. Esto implicaría obtener información útil sin tener que realizar una calibración ni recurrir a un método de reconstrucción inversa para obtener la posición exacta del trazador. 88 (a) (b) Figura III.3.4.4. Configuración C utilizada para realizar experimentos de calibración estática con la fuente de 198Au. Al realizar la calibración estática para la condición ug = 0m/s en las distintas configuraciones, se adquirió el contaje simultáneo de los detectores para posiciones adicionales a las utilizadas durante la calibración estática en los experimentos con escandio. Las coordenadas de estas posiciones fueron cuidadosamente seleccionadas y son posiciones intermedias a las posiciones de calibración que se habían utilizado en los experimentos con 46Sc. Las mismas no se mantienen constantes cuando cambia z. Por lo tanto, cada experimento de calibración consistió en la toma de 125 posiciones de calibración, más 50 posiciones extra intermedias, en total 175. El esquema de calibración completo se muestra en la Figura III.3.4.5. 89 60 40 40 20 20 y (mm) y (mm) 60 0 -60 -40 -20 0 20 40 60 0 -60 -40 -20 -20 -20 -40 -40 -60 Calibración Intermedias z = 50 mm -40 x (mm) 60 60 40 40 20 20 0 -60 -20 0 20 40 60 40 60 z = 150 mm 0 -60 -40 -20 0 -20 -20 -40 -40 -60 Calibración Intermedias 20 -60 x (mm) y (mm) y (mm) Calibración Intermedias 0 20 40 60 -60 x (mm) Calibración Intermedias z = 250 mm x (mm) z = 350 mm 60 40 y (mm) 20 0 -60 -40 -20 0 20 40 60 -20 -40 -60 Calibración Intermedias x (mm) z = 450 mm Figura III.3.4.5. Posiciones de calibración incluyendo la ubicación de las 50 posiciones de calibración intermedias adicionales. 90 Luego, se compararon las reconstrucciones de las posiciones estáticas para la condición ug = 0m/s para las tres configuraciones de detectores estudiadas, utilizando el algoritmo Cross Correlation. El objetivo de esta comparación era el de estudiar el efecto de la distribución de detectores alrededor de la columna sobre la reconstrucción de las posiciones a partir de las cuentas de los diferentes detectores. Este es un punto importante cuando se cuenta con un número limitado de detectores. La comparación se realizó utilizando el algoritmo Cross Correlation debido a que era necesario realizar la comparación de las reconstrucciones de las posiciones estáticas obtenidas con el mismo algoritmo. Para la Configuración C no se puede utilizar el algoritmo de reconstrucción de Monte Carlo porque existen algunas posiciones del trazador dentro del reactor cuya emisión de rayos gama atraviesa más de un cristal de NaI, con la consiguiente absorción en cada uno de ellos. Esto implica la necesidad de incorporar mayores detalles geométricos en el algoritmo de reconstrucción y disminuyen la capacidad del modelo de predecir la intensidad medida con cada detector. La Figura III.3.4.6 ilustra este efecto. Detector de NaI Partícula trazadora Rayos gama Figura III.3.4.6. Esquema del efecto de la Configuración C para algunas posiciones de la partícula trazadora dentro de la columna. Luego, basados en los resultados que se muestran en la sección IV.2.2 de esta tesis, la Configuración B se utilizó para realizar calibraciones estáticas y dinámicas para distintas condiciones experimentales. La Tabla III.3.4.1 resume todas las condiciones 91 experimentales para las cuales se realizaron calibraciones estáticas (125 + 50 intermedias) y dinámicas con la Configuración B. Las reconstrucciones de los experimentos incluidos en la Tabla III.3.4.1 se realizaron con el algoritmo Cross Correlation, luego de comparar los resultados obtenidos para la reconstrucción de las 50 posiciones de calibración intermedias para la condición ug = 0m/s con los dos algoritmos disponibles (Monte Carlo adaptado para 198Au y Cross Correlation). ug (m/s) Régimen de Flujo 0 Estático 0.02 Homogéneo 0.04 Homogéneo 0.08 Heterogéneo 0.11 Heterogéneo Tabla III.3.4.1 Condiciones experimentales para las cuales se realizaron calibraciones estáticas y dinámicas con la Configuración B de detectores con la fuente de 198Au. Para las calibraciones dinámicas realizadas con la Configuración B, el mecanismo de cálculo de la velocidad del cilindro, se sustituyó por un sistema que utilizaba un MPLI (Multi Purpose Lab Interface). El mismo permite utilizar distintos tipos de sensores para realizar una gran cantidad de mediciones (12 bit, 3 canales, conversor analógico–digital, velocidad máxima de recolección de datos: 75000/seg). El instrumento utilizado se muestra en la Figura III.3.4.7. Figura III.3.4.7. MPLI (Multi Purpose Lab Interface) utilizado para adquisición de datos. 92 El MPLI fue utilizado para medir la fuerza de un resorte y así determinar la posición del trazador debida al recorrido del cilindro de aire comprimido (ascensos y descensos) cada 33 ms. La Figura III.3.4.8 muestra en detalle el sistema implementado. (a) (b) (c) Figura III.3.4.8. Detalle del sistema resorte - MPLI implementado para seguir el recorrido del pistón. Durante los experimentos con la Configuración B, el sistema resorte - MPLI fue utilizado para medir posiciones estáticas en las condiciones experimentales estudiadas y para cuantificar el movimiento del pistón durante los ascensos y descensos del pistón. El movimiento del pistón se estudió para tres velocidades: baja, intermedia y alta. La Configuración C fue diseñada con un doble fin. Por un lado, se quería estudiar el efecto del aumento del número de detectores sobre la reconstrucción de las posiciones. Por este motivo se realizaron calibraciones estáticas para compararlas con las otras dos configuraciones de detectores A y B. Dado que el número de detectores seguía siendo limitado, se eligió esta configuración con el objetivo de poder realizar estudios de compartimentización de la partícula en futuros experimentos. La Configuración C fue utilizada también para probar la instalación de un encoder para reemplazar al sistema resorte - MPLI con el objetivo de mejorar la cuantificación del movimiento del pistón del cilindro de aire comprimido. La ventaja del encoder sobre el MPLI es que, el mismo, es capaz de registrar simultáneamente 93 tanto posiciones como velocidades instantáneas; y es capaz de hacerlo en simultáneo con la adquisición de las cuentas y a la misma frecuencia de muestreo (33Hz para nuestros experimentos) a través del bloque de módulos CAMAC. El encoder se compone básicamente de un disco oscuro con 2000 sectores radiales que dejan pasar la luz, un emisor de luz y un detector de luz enfrentados dejando el disco posicionado en el medio. Al girar el disco pasa luz o no, según se interponga entre el emisor y el detector un sector traslúcido o una zona oscura. Entre dos de los cables de salida del encoder habrá entonces una señal de varios volts si pasa luz, o cero volt en caso contrario. Midiendo este voltaje vemos una señal escalón que se manda a un módulo electrónico (Single Channel Analizer) que da un pulso cada vez que crece el voltaje. Un pulso, representa un giro de 360 grados dividido 2000, y también una distancia si tenemos en cuenta el diámetro del eje del encoder (llamemos K al factor de transformación de pulsos a distancia). La señal de encoder (1 pulso cada vez que gira un cierto ángulo) va a un scaler del sistema de adquisición, junto con las cuentas de todos los detectores. La velocidad instantánea se calcula con el número de pulsos registrado dividido por el tiempo de muestreo (corregido por el factor K de transformación de pulso a distancia). Cada posición instantánea x(i) se calcula de la siguiente manera: x(i) = x(i-1) + nro pulsos x K. (III.3.4.1) La resolución del encoder es de aproximadamente 20µm. La Figura III.3.4.9 muestra en detalle la instalación del encoder. El hecho de contar con un instrumento como el encoder permitió mejorar la medición de las posiciones instantáneas del movimiento del pistón del cilindro de aire comprimido, generando una mejor comparación entre las posiciones medidas y las reconstruidas, por el hecho de adquirir con mayor resolución posiciones en simultáneo y con la misma frecuencia de muestreo. Además, el encoder permitió obtener velocidades instantáneas. Este es un avance muy importante dado que no hay registrados en literatura este tipo de mediciones en experimentos de RPT. 94 (a) (b) (c) Figura III.3.4.9. Instalación del encoder en el cilindro neumático solidario al movimiento del pistón. Por último, y avalado por los alentadores resultados de los experimentos de calibración estática y dinámica obtenidos, en los cuales fue posible reconstruir el movimiento de una partícula radiactiva en movimiento a distintas velocidades, utilizando fuentes radiactivas de distintas energías y con diferentes algoritmos de reconstrucción, se realizó un experimento preliminar de RPT en el sistema montado para verificar su aplicación al dejar la partícula en libre movimiento. Dicho experimento se realizó en la misma columna en la que se llevaron a cabo los experimentos de calibración dinámica y estática utilizando la Configuración C de detectores, en condiciones de régimen heterogéneo (ug = 0.08m/s). En resumen, los experimentos que se realizaron con la Configuración C de detectores fueron los siguientes: • Calibración estática para la condición ug = 0m/s. • Verificación del sistema implementado reconstruyendo un movimiento conocido. Se estudiaron 3 velocidades distintas del pistón (baja, intermedia y 95 alta) utilizando el encoder, para las condiciones experimentales que se muestran en la Tabla III.3.4.2. ug (m/s) Régimen de Flujo 0 Estático 0.02 Homogéneo 0.04 Homogéneo 0.08 Heterogéneo 0.10 Heterogéneo Tabla III.3.4.2. Condiciones experimentales para las cuales se realizaron calibraciones dinámicas con la Configuración C de detectores con la fuente de 198Au. • Experimento de RPT en la columna de burbujeo con agua en batch y ug = 0.08m/s (régimen heterogéneo). Se realizó la calibración estática en la condición ug = 0.08m/s para las 175 posiciones de calibración que se muestran en la Figura III.3.4.5 con la fuente de PVC cilíndrica que se describe en la sección II.3.2 (Preparación de trazadores). Luego, la fuente preparada con densidad próxima a la del agua descripta en la misma sección se dejó libre en la columna de burbujeo (previo ajuste de la calibración), adquiriendo las cuentas simultáneas de los 10 detectores de NaI(Tl) a una frecuencia de 33Hz. 96 III. 4. EXPERIMENTOS DE RPT EN LECHOS FLUIDIZADOS TRIFÁSICOS El movimiento de un trazador sólido que se mueve libremente en un reactor provee información de la dinámica de las partículas. La trayectoria de este trazador es el resultado de las variables presentes que definen la evolución del movimiento de las partículas. Tanto la fase líquida como la gaseosa son las que imponen este movimiento en un lecho fluidizado trifásico. Un cambio en el régimen de flujo se verá indefectiblemente reflejado en el movimiento de los sólidos en el lecho a medida que se varían las condiciones de operación. Por lo tanto, se decidió examinar la trayectoria de la partícula con diversos métodos estadísticos para identificar transiciones de régimen de flujo. En particular, se seleccionó una de las coordenadas a partir de las trayectorias del trazador sólido y se la eligió como variable característica para llevar adelante los distintos análisis e identificar el régimen de flujo presente en el lecho. Las trayectorias de los trazadores sólidos, con propiedades similares a las partículas que forman parte de los lechos fluidizados, fueron obtenidas con dos equipos de RPT distintos, denominados A (Larachi et al., 1996) y B (Limtrakul, 1996); y en columnas de distintos tamaños (dos columnas de 0.1m y una de 0.14m de diámetro interno). Los equipos de RPT utilizados para los experimentos consistían en arreglos de 8 y 32 detectores de NaI(Tl), según el caso, con el objetivo de capturar la radiación gama irradiada por el trazador radiactivo (conteniendo el radioisótopo de 46Sc). Las series temporales de las posiciones del trazador sólido fueron determinadas a una frecuencia de muestreo de 30 ó 50ms según el equipo utilizado. Los sólidos utilizados fueron bolitas de vidrio (ρ = 2500 kg/m3) de 1, 3 y 5 mm de diámetro. El sistema trifásico fluidizado, fue para todos los experimentos aire y agua fluyendo en cocorriente ascendente. Los experimentos fueron realizados a distintas velocidades superficiales de gas y líquido, para cada tamaño de columna. También fueron examinadas mezclas de sólidos. Los cambios en el régimen de flujo, identificados por inspección visual, se correspondían suficientemente bien con los mapas de Zhang et al. (1997) para lechos fluidizados trifásicos de diámetro de columna y tamaño de partículas similares. Las condiciones experimentales analizadas se listan en la Tabla III.4.1, junto con las predicciones de régimen de flujo de Zhang et al. (1997). 97 Diámetro columna (m) Equipo 0.1 0.1 0.1 0.14 0.14 0.14 0.14 RPT A B B B B B B Tamaño particula GB 3 mm GB 3 mm GB 3 mm GB 3 mm GB 3 mm GB 1 mm GB 1 mm uL (m/s) 0.065 0.100 0.130 0.070 0.100 0.040 0.053 ug (m/s) Régimen de flujo predicho por Zhang et al (1997) 0.032 Homogéneo(1) 0.069 Heterogéneo(1) 0.110 Heterogéneo(1) 0.020 Homogéneo(1) 0.040 Homogéneo(1) 0.080 Heterogéneo(1) 0.100 Heterogéneo(1) 0.020 Homogéneo(1) 0.040 Homogéneo(1) 0.080 Heterogéneo(1) 0.040 Heterogéneo(1) 0.080 Heterogéneo(1) 0.100 Heterogéneo(1) 0.040 Heterogéneo(1) 0.080 Heterogéneo(1) 0.100 Heterogéneo(1) 0.020 Heterogéneo(2) 0.040 Heterogéneo(2) 0.080 Heterogéneo(2) 0.020 Heterogéneo(2) 0.040 Heterogéneo(2) 0.080 Heterogéneo(2) (1) mapa para GB 4.5 mm (2) mapa para GB 1.5 mm Tabla III.4.1. Condiciones experimentales examinadas y su correspondiente predicción del régimen de flujo presente según Zhang et al. (1997). 98 III.5. EXPERIMENTOS DE RPT EN COLUMNAS DE BURBUJEO Basados en el mismo criterio expresado en III.4, que propone identificar transiciones y/o regímenes de flujo a partir del movimiento de un trazador determinado por RPT, se decidió también examinar experimentos de RPT realizados previamente en columnas de burbujeo por Degaleesan (1997) en su tesis. Los experimentos de RPT fueron realizados en dos columnas de Plexiglas de 0.19m y 0.14m de diámetro interno. En todos los casos se utilizó agua en batch y se varió la velocidad de gas a presión atmosférica. Los experimentos en la columna de 0.19m de diámetro se realizaron utilizando un plato perforado como distribuidor, a tres velocidades superficiales de gas, con el objetivo de explorar los tres regímenes de flujo: homogéneo, transición, y heterogéneo. Los mismos fueron verificados por inspección visual. En el caso de la columna de 0.14m, los experimentos se realizaron utilizando un plato perforado como distribuidor y se exploraron las mismas condiciones de flujo. Las condiciones de operación estudiadas se resumen en la Tabla III.5.1. Diámetro de columna (m) 0.19 0.14 ug (m/s) Régimen de flujo 0.020 Homogéneo 0.050 Transición 0.120 Heterogéneo 0.024 Homogéneo 0.048 Transición 0.120 Heterogéneo Tabla III.5.1. Condiciones experimentales correspondientes a los experimentos de RPT en columnas de burbujeo (Degaleesan, 1997). Para ambas columnas la transición de régimen homogéneo a heterogéneo ocurrió entre 0.05 y 0.07 m/s. 99 El equipo de RPT consistía en un arreglo de 16-20 (según el tamaño de la columna) detectores de NaI(Tl) de 2’’x 2’’, ubicados en la siguiente configuración: en cada nivel se ubicaban dos detectores enfrentados, es decir, separados entre sí 180°, formando un par. Al siguiente par de detectores enfrentados ubicados en el nivel superior, se incrementó en 45° la posición angular. Se continuó este procedimiento hasta completar la zona abarcada por los detectores. La fuente radiactiva fue de 46 Sc. El trazador, en este caso, consistía en una partícula de igual densidad que el fluido que se quería trazar (agua). Una pequeña partícula de 46Sc metálico fue introducida en una esfera de polipropileno de 2.36mm de diámetro externo, previamente agujereada para lograr la densidad del agua dejando una pequeña burbuja de aire en el interior. La partícula formada por polipropileno + 46 Sc + aire es una esfera de densidad muy próxima a la del agua (entre 0.9995 y 1.0005 g/cm3). III.6. MEDICIONES DE FLUCTUACIONES DE PRESIÓN EN COLUMNAS DE BURBUJEO Con el fin de realizar análisis similares sobre una variable característica distinta al movimiento del trazador, se realizaron mediciones de fluctuaciones de presión en las mismas columnas de burbujeo en las que se realizaron los experimentos de RPT descriptos en la sección III.5 con sensores ubicados a distintas alturas en ambas columnas. Se utilizaron 4 (cuatro) sensores dinámicos de presión PBC Piezotronics, modelo 106B. Los mismos tenían una sensibilidad de 300mV/psi y una resolución de 0.1 mpsi. Los sensores fueron conectados a un acondicionador de señal (PBC Piezotronics, modelo 482A16) de cuatro canales con ganancia x1, x10 y x100. El acondicionador de señales fue conectado al sistema de adquisición Power DAQ 12bit A/D +/- 5 V y los datos fueron grabados en una PC. Las fluctuaciones de presión fueron adquiridas con una ganancia de 100 y a una frecuencia de muestreo de 400Hz. En las Figuras III.6.1, III.6.2 y III.6.3 se ven fotos de los sensores de presión utilizados, un esquema de los mismos y un esquema del acondicionador de señales, respectivamente. 100 Figura III.6.1. Foto de los sensores de presión PBC Piezotronics 106B. Figura III.6.2. Esquema de funcionamiento de los sensores de presión PBC Piezotronics 106B. Figura III.6.3. Esquema de funcionamiento del acondicionador de señal PBC Piezotronics, modelo 482A16. 101 En las Figuras III.6.4 y III.6.5 se ilustra la posición de los sensores de presión en las dos columnas empleadas para las mediciones. En la columna de 0.19m de di, los mismos estaban dispuestos a 18, 33, 67 y 82 cm por encima del distribuidor. En la Figura III.6.6 se muestra el soporte diseñado para implementar los sensores de la columna de 0.14m. En esta columna los sensores fueron ubicados a 38, 68, 83 y 98 cm por encima del distribuidor. Figura III.6.4. Fotos del arreglo de sensores de presión a lo largo de la columna de 0.19m de di. 102 Figura III.6.5. Foto del arreglo de sensores de presión a lo largo de la columna de 0.14m de di. Figura III.6.6. Fotos de un sensor de presión en su soporte correspondiente para ser colocado en la columna de 0.14m. III.6.1. CLASIFICACIÓN DE REGÍMENES DE FLUJO Las mediciones de fluctuaciones de presión para los cuatro sensores fueron realizadas primero para las condiciones experimentales en las que se tenían datos de RPT. Luego, con el objetivo de extender los resultados, se estudió un amplio rango de 103 condiciones de operación: 0.02m/s a 0.22m/s en la columna de 0.19m de di; y 0.036m/s a 0.20m/s en la columna de 0.14m de di. III.6.2. PERTURBACIÓN EN LA FLUIDODINÁMICA POR UN CAMBIO EN EL CARÁCTER ESPUMANTE DEL LÍQUIDO Los experimentos descriptos en esta sección se realizaron con el fin de analizar la sensibilidad y velocidad de detección de una perturbación en la operación de una columna de burbujeo inducida por un cambio en el carácter espumante del líquido. Los experimentos se realizaron en la columna de burbujeo de 0.19m de diámetro interno y 2.50m de alto de Plexiglas utilizando agua en batch y una velocidad de gas constante de ug = 0.16m/s, condiciones que conducen a una operación en régimen heterogéneo. Se utilizaron los 4 (cuatro) sensores dinámicos de presión PBC Piezotronics, modelo 106B, descriptos en la sección anterior. Se adquirieron las fluctuaciones de presión en simultáneo de los cuatro sensores, a 400 Hz, para una condición bien definida en régimen heterogéneo. Entre los 16 y 17 minutos de comenzada la adquisición, se adicionaron por el tope de la columna, 80µl de Triton X100 diluido en agua. La adquisición se interrumpió cuando el sistema se estabilizó después de 180 minutos. 104 CAPITULO IV Resultados y análisis El análisis de resultados de los experimentos descriptos en la Parte Experimental consta de dos grandes partes. Por un lado, se presentan los resultados obtenidos a partir de las técnicas de Densitometría de rayos gama y RPT desarrolladas e implementadas en el CAC. Por otro lado, se presentan distintos tipos análisis de series temporales obtenidas a partir de las distintas técnicas no invasivas examinadas con el objetivo de extraer información dinámica del comportamiento de los distintos sistemas multifásicos presentados en la Parte Experimental. IV. 1. DENSITOMETRÍA En la Figura IV.1.1 se muestran 30 segundos de las series temporales del número de fotones adquiridos a 33 Hz por el detector 1 de la configuración C1 usando la fuente de 241Am para dos condiciones estáticas, una condición en régimen homogéneo y otra en heterogéneo. Se observa una gran diferencia entre el número de fotones que atraviesan la columna cuando está vacía y cuando está llena de agua (con velocidad de gas cero); ésto se debe a la baja energía de la fuente (pico principal 60 keV) que determina que el grado de absorción por agua sea significativo. Los rayos gama emitidos por una fuente de baja energía como el 241 Am son muy sensibles a cambios en la distribución del hold up de gas debido al alto coeficiente de atenuación lineal del agua para estas energías. Las series temporales de las Figuras IV.1.1 (a) y IV.1.1 (b) dan las fluctuaciones de la fuente alrededor del promedio para los casos extremos en caso de utilizar 241Am con la fuente enfrentada al detector. Las fluctuaciones que se observan en estas figuras son totalmente 105 aleatorias y están asociadas a la naturaleza estocástica de la radiación, sin influencia de la hidrodinámica del sistema. 1800 1600 1600 Número de fotones Número de fotones 1800 Columna vacía 1400 1200 1000 800 200 400 600 800 t (unidades de tiempo) 1000 (b) 200 400 600 t (unidades de tiempo) 800 1000 1800 1600 1600 ug = 0.03 m/s Número de fotones Número de fotones 1200 600 0 1000 1800 1400 1200 1400 800 (a) 600 0 ug = 0 m/s (c) 1000 800 600 0 (d) ug = 0.09 m/s 1400 1200 1000 800 200 400 600 800 t (unidades de tiempo) 1000 600 0 200 400 600 t (unidades de tiempo) 800 1000 Figura IV.1.1. Series temporales representativas de número de fotones para diferentes condiciones experimentales adquiridas por el detector 1 en la configuración C1, utilizando la fuente de 241Am, a una frecuencia de muestreo de 33Hz. Cuando el gas empieza a circular, las fluctuaciones de la señal se vuelven más determinísticas, empezando a evidenciarse picos que se hacen cada vez más grandes y frecuentes a medida que la velocidad de gas es más alta. Estos picos corresponden probablemente al pasaje de burbujas a lo largo del recorrido atravesado por los rayos gama desde que son emitidos por la fuente hasta que llegan al detector. A medida que la velocidad de gas se incrementa, el valor promedio se va modificando entre los dos valores extremos correspondientes a la columna vacía y llena de agua con velocidad de gas cero. Los efectos se ponen más de manifiesto cuando se observan menos puntos de las series temporales. En la Figura IV.1.2 se observan porciones representativas de series temporales de fotones medidas en todas las condiciones experimentales estudiadas. 106 650 600 600 550 550 500 Número de fotones Número de fotones 650 Columna vacía 450 400 350 (a) 300 20 40 60 t (unidades de tiempo) 80 200 0 100 650 600 600 550 550 500 Número de fotones Número de fotones 350 ug = 0.02 m/s 450 400 350 (c) 20 500 40 60 t (unidades de tiempo) 80 100 ug = 0.03 m/s 450 400 350 (d) 300 250 250 20 40 60 t (unidades de tiempo) 80 200 0 100 650 600 600 550 550 500 Número de fotones 650 ug = 0.04 m/s 450 400 (e) 350 100 100 ug = 0.05 m/s (f) 350 250 80 80 400 300 40 60 t (unidades de tiempo) 40 60 t (unidades de tiempo) 450 250 20 20 500 300 200 0 (b) 250 300 Número de fotones 400 650 200 0 ug = 0 m/s 450 300 250 200 0 500 200 0 20 40 60 t (unidades de tiempo) 80 100 Figura IV.1.2 (a)-(f). Series temporales del número de fotones para todas las condiciones experimentales adquiridas por el detector 1 en la configuración C1, utilizando la fuente de 241 Am, a una frecuencia de muestreo de 100Hz. 107 600 550 550 500 400 (g) 350 500 400 300 250 40 60 t (unidades de tiempo) 80 200 0 100 650 650 600 600 550 550 500 ug = 0.08 m/s 450 400 (i) 350 200 0 100 650 650 600 600 550 550 500 ug = 0.11 m/s 450 400 (k) 350 100 80 100 ug = 0.13 m/s (l) 350 250 80 40 60 t (unidades de tiempo) 400 300 40 60 t (unidades de tiempo) 20 450 250 20 (j) 500 300 200 0 100 350 250 80 80 ug = 0.09 m/s 400 250 40 60 t (unidades de tiempo) 40 60 t (unidades de tiempo) 450 300 20 20 500 300 200 0 (h) 350 250 20 ug = 0.07 m/s 450 300 Número de fotones Número de fotones ug = 0.06 m/s 450 200 0 Número de fotones Número de fotones 650 600 Número de fotones Número de fotones 650 200 0 20 40 60 t (unidades de tiempo) 80 100 Figura IV.1.2 (g)-(l). Series temporales del número de fotones para todas las condiciones experimentales adquiridas por el detector 1 en la configuración C1, utilizando la fuente de 241 Am, a una frecuencia de muestreo de 100Hz. En la Figura IV.1.3 se muestran las funciones de densidad de probabilidades, estimadas a partir del número de fotones de series temporales adquiridas a 33Hz para algunas condiciones típicas estudiadas (condiciones estáticas; condición en el régimen homogéneo; transición; condición en el heterogéneo). 108 4000 4000 3500 (a) ug = 0.02 m/seg 3000 2500 Número de eventos Número de eventos 3500 ug = 0 m/seg Columna vacía 2000 1500 1000 500 0 600 800 1000 1200 1400 1600 Número de fotones 2000 1500 1000 0 600 1800 (b) 800 1000 1200 1400 1600 Número de fotones 1800 4000 3500 3500 ug = 0.13 m/seg ug = 0.06 m/seg 3000 Número de eventos Número de eventos 2500 500 4000 2500 2000 1500 (c) 1000 500 0 600 3000 3000 2500 2000 1500 (d) 1000 500 800 1000 1200 1400 1600 Número de fotones 1800 0 600 800 1000 1200 1400 1600 Número de fotones 1800 Figura IV.1.3. Funciones de densidad de probabilidades del número de fotones adquiridos por el detector 1 en la configuración C1 utilizando la fuente de 241Am a una frecuencia de muestreo media (33Hz), para distintas condiciones de operación claves. La Figura IV.1.3 (a) evidencia la distribución de Poisson o aproximadamente normal alrededor del promedio del número de fotones para ambas condiciones estáticas. Cuando comienza la inyección de gas, la distribución se va apartando paulatinamente de la normal, mostrando una total desviación para altos valores de velocidad de gas. Mientras más aumenta la velocidad de gas, la FDP se aparta más de la distribución normal, tendiendo prácticamente a una distribución log normal para muy altas velocidades. Por lo tanto, dado el comportamiento observado por las series temporales de cuentas de fotones para esta configuración y fuente radiactiva, se intentó cuantificar esta variación. Con este objetivo se determinaron diferentes números estadísticos que se utilizan para caracterizar la forma de la Función de Densidad de Probabilidades. Particularmente, se calcularon los cuatro primeros momentos muestrales (Hamilton, 1994): 109 M (r) 1 N = ∑ ( x i ) ; r = 1,2,…. N i =1 r (IV.1.1) donde M(r) es el momento de orden r, N es el número de observaciones y xi son las cuentas de fotones adquiridas para cada observación. El promedio de la población es estimado por el primer momento de la muestra. Para todos los experimentos, el promedio muestral crece progresivamente entre los dos extremos a medida que se incrementa la velocidad de gas sin observarse quiebres significativos de la tendencia. Este valor está asociado a la atenuación media del sistema gas-líquido y provee una forma de estimar el hold up de gas promedio. La varianza de la muestra es el segundo momento centrado en el promedio. El momento muestral de orden 3 se relaciona con la asimetría (skewness) de la muestra; la skewness es el momento de orden 3 de los datos normalizados. Si la skewness es negativa, los datos están sesgados hacia la izquierda del promedio. Por el contrario, si es positiva, están sesgados hacia la derecha. La skewness de la distribución normal (o cualquier distribución perfectamente simétrica) es cero. El momento muestral de orden cuatro normalizado da la curtosis de la muestra, lo cual es una medida de cuán estrecha (concentrada en torno a la media) o achatada es la distribución con respecto a un estándar, que en este caso es la distribución normal. La curtosis de la distribución normal es 3. Distribuciones más concentradas sobre la media tienen curtosis mayores a 3, mientras que distribuciones más achatadas tienen una curtosis menor que 3. En la Figura IV.1.4 se examinaron, para distintas condiciones experimentales, las variaciones de los momentos muestrales de mayor orden, centrados alrededor del promedio, para series temporales adquiridas por el detector 1 en la configuración 1 (distancia efectiva = 10cm) utilizando una fuente de 241Am de 2mCi. Con el objetivo de comparar la habilidad de los diferentes cuantificadores para diagnosticar la transición de flujo y comparar todas las configuraciones estudiadas, los momentos fueron normalizados al máximo valor obtenido, a fin de acotar los resultados entre 0 y 1. 110 2nd2do order moment momento 1.2 1 M2_Am_33Hz M2_Am_10Hz 0.8 0.6 0.4 0.2 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug(m/s) 3rd order moment 3er momento 4th4to order moment momento 1.2 1.2 1 M3_Am_33Hz M3_Am_10Hz 0.8 1 M4_Am_33Hz 0.8 M4_Am_10Hz 0.6 0.6 0.4 0.4 0.2 0.2 0 0 0 0.02 0.04 0.06 0.08 ug(m/s) 0.1 0.12 0.14 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug(m/s) Figura IV.1.4. Momentos muestrales de orden dos, tres y cuatro determinados a partir se las series temporales de número de fotones adquiridos por el detector 1 en la configuración C1 (distancia efectiva =10 cm) usando la fuente de 241Am de 2mCi. Se examinaron los momentos de orden dos, tres y cuatro a partir de los datos crudos para todas las configuraciones y frecuencias de muestreo estudiadas. Se encontraron resultados similares para frecuencias de muestreo entre 100Hz y 33Hz y para frecuencias de muestreo entre 20Hz y 10Hz. Se muestran resultados representativos para frecuencias de 33 y 10Hz. La Figura IV.1.4 evidencia un cambio abrupto en la tendencia de los momentos muestrales para velocidades de gas cerca de la transición. El momento muestral de tercer orden muestra las variaciones más altas si bien la variación posterior es menos lineal. Sería un buen candidato para realizar clasificación de regímenes de flujo. Para todos los casos, el quiebre cerca de las 111 condiciones que llevan a una transición de flujo se observa tanto si la frecuencia es de 33Hz como de 10 Hz, donde el número de cuentas adquiridas es mayor en el intervalo. Si bien las frecuencias más bajas son levemente más eficientes para detectar la transición de flujo, aún las frecuencias más altas permiten la identificación del quiebre para esta configuración, utilizando la fuente de 241Am de 2mCi. En la Figura IV.1.5 se muestran resultados equivalentes a los de la Figura IV.1.4 pero para el detector 2 de la configuración 1 (distancia efectiva = 31cm) y en la Figura IV.1.6 para la configuración C2 (distancia efectiva =18cm). do 2nd2order moment momento 1.2 1 M2_Am_33Hz M2_Am_10Hz 0.8 0.6 0.4 0.2 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug(m/s) er 3rd3order moment momento to 4th4order moment momento 1.2 1.2 1 M3_Am_33Hz 0.8 M3_Am_10Hz 1 M4_Am_33Hz M4_Am_10Hz 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 0 0.02 0.04 0.06 0.08 ug(m/s) 0.1 0.12 0.14 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug(m/s) Figura IV.1.5. Momentos muestrales de orden dos, tres y cuatro determinados a partir de series temporales del número de fotones adquiridos por el detector 2 de la configuración C1 (distancia efectiva =31 cm) utilizando la fuente de 241Am de 2mCi. 112 do 2nd2order moment momento 1.2 1 M2_Am_33Hz 0.8 M2_Am_10Hz 0.6 0.4 0.2 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug(m/s) to 4th4order moment momento er 3rd3order moment momento 1.2 1.2 1 1 M3_Am_33Hz M3_Am_10Hz 0.8 M4_Am_33Hz M4_Am_10Hz 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 0 0.02 0.04 0.06 0.08 ug(m/s) 0.1 0.12 0.14 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug(m/s) Figura IV.1.6. Momentos muestrales de orden dos, tres y cuatro determinados a partir de series temporales del número de fotones adquiridos por el detector 2 de la configuración C1 (distancia efectiva =18 cm) utilizando la fuente de 241Am de 2mCi. Las Figuras IV.1.5 y IV.1.6 indican que el quiebre cerca de la transición de flujo se vuelve más gradual y, en consecuencia, menos apropiado para detectar una transición. Este efecto puede ser atribuido al aumento de la longitud de la emulsión bifásica entre la fuente y el detector. Una mayor distancia recorrida por los fotones conduce a una señal con un efecto más promediado del comportamiento de las burbujas, adicionándose una mayor dispersión de la radiación ocasionada por la mayor probabilidad de interacción en el camino atravesado comparada con el caso del detector 1 en la configuración C1. 113 El efecto de la atenuación y dispersión de la radiación para la fuente de 241Am de 2mCi puede observarse en la Figura IV.1.7 (a) y (b). En la Figura IV.1.7 (a) se muestran los espectros del 241 Am para las condiciones de operación extremas: columna vacía (aire) y llena de agua con ug = 0m/s. Cuando la columna solamente contiene aire se observan dos picos bien definidos, cada uno en la energía correspondiente. Cuando la columna está llena de agua, los picos se atenúan y se ensanchan a medida que disminuye el volumen de gas en el medio. En la Figura IV.1.7 (b) se observa cómo este fenómeno se produce gradualmente con la variación en el caudal de gas. x 10 4 14 Número de fotones 12 aire agua (ug = 0 m/s) 10 8 6 4 (a) 2 0 0 x 10 4 aire ug = 0 m/s ug = 0.03 m/s ug = 0.06 m/s ug = 0.13 m/s 12 Número de fotones 14 10 8 6 4 (b) 2 1000 2000 3000 4000 t (unidades de tiempo) N° canales 5000 0 0 1000 2000 3000 4000 t (unidades de tiempo) N° canales 5000 Figura IV.1.7. Espectro de la fuente de 241Am de 2mCi adquirido por el detector 1 de la configuración C1 durante los experimentos. A medida que la distancia entre el detector y la fuente aumenta, la posibilidad de interacción con el agua es mayor, disminuyendo la sensibilidad de detección de la presencia de cierto tipo de burbujas y conduciendo a diferencias menos pronunciadas. La Figura IV.1.8 ilustra la comparación de los momentos muestrales calculados a partir del número de fotones registrados utilizando la fuente de 241 Am de 2mCi restringiendo el espectro de energía alrededor de 60KeV (parcial) o empleando una ventana de energía que contiene a los dos picos característicos del espectro (total) observados en la Figura IV.1.7. El objetivo de este experimento fue estudiar el efecto de trabajar con una fuente colimada en energía. De esta forma, se puede analizar si se mejora la respuesta por la reducción del ensanchamiento del pico. 114 2do momento 2do momento 1.2 1.2 1 1 M2_Am_total_10Hz M2_Am_total_33Hz 0.8 0.8 M2_Am_parcial_33Hz 0.6 M2_Am_parcial_10Hz 0.6 0.4 0.4 0.2 0.2 0 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0 0.02 0.04 0.06 0.08 ug(m/s) 0.12 0.14 ug(m/s) 3er momento 3er momento 1.2 1.2 1 1 M3_Am_total_33Hz 0.8 0.1 M3_Am_total_10Hz 0.8 M3_Am_parcial_33Hz M3_Am_parcial_10Hz 0.6 0.6 0.4 0.4 0.2 0.2 0 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0 0.02 0.04 ug (m/s) 0.08 0.1 0.12 0.14 0.12 0.14 ug (m/s) 4to momento 1.2 0.06 4to momento 1.2 1 1 0.8 0.8 M4_Am_total_33Hz M4_Am_parcial_33Hz 0.6 M4_Am_total_10Hz M4_Am_parcial_10Hz 0.6 0.4 0.4 0.2 0.2 0 0 0 0.02 0.04 0.06 0.08 ug (m/s) 0.1 0.12 0.14 0 0.02 0.04 0.06 0.08 0.1 ug (m/s) Figura IV.1.8. Momentos muestrales de orden dos, tres y cuatro determinados a partir de las series temporales del número de fotones adquiridas por el detector 1 en la configuración C1 (distancia efectiva = 10cm) utilizando la fuente de 241Am. Comparación entre resultados obtenidos restringiendo la ventana de energías alrededor de 60 keV (parcial) o a fin de incorporar los dos picos característicos del espectro de energía de la fuente (total). En la Figura IV.1.8 se puede observar que no es significativa la diferencia en los momentos muestrales calculados restringiendo la ventana de energía al pico principal o incorporando ambos picos. En consecuencia, para este tipo de análisis, el efecto de 115 restringir el rango de energías es únicamente disminuir el número de fotones adquiridos y no resulta beneficioso. Este hecho simplifica la implementación de la técnica para aplicaciones en la industria, dado que no siempre se cuenta con el personal especializado o el equipamiento para restringir el rango de energías observado. Estos resultados sugieren que el efecto más importante una vez definida la fuente, y con ella la energía característica de la misma, es el de la comparación del número de fotones sin importar si los mismos provienen del pico característico o del de dispersión. Dado que resultaría importante el uso del método en equipos grandes, se estudió la posibilidad de utilizar fuentes más intensas y otros radioisótopos emisores de rayos gama de energías mayores. En equipos de mayor tamaño o en sistemas trifásicos, el uso de fuentes de baja energía como el 241Am puede no ser factible por la alta absorción del medio entre la fuente y el detector, que conduciría a obtener una señal demasiado baja. En consecuencia, se probó el método con dos fuentes de mayor energía para estudiar la influencia sobre el diagnóstico de la transición de flujo, cuantificando las características de la FDP del número de fotones capaces de atravesar la columna. Se utilizó la configuración C1 para comparar. Las Figuras IV.1.9 y IV.1.10 muestran las series temporales del número de fotones adquiridos por el detector 1 en la configuración C1 cuando se utiliza una fuente de 198 Au (412 KeV) para dos frecuencias de adquisición distintas, las mismas que se mostraron para el 241Am en las Figuras IV.1.1 y IV.1.2. En las Figuras IV.1.9 y IV.1.10 (a) y (b) se aprecia el comportamiento aleatorio de las series temporales cuando no existe movimiento macroscópico dentro de la columna. Se observa que el promedio del número de fotones que atraviesan la columna vacía y la columna llena de agua son significativamente diferentes, prácticamente el doble. Cabe destacar que, en el caso del 241 Am, la diferencia entre los promedios para las dos condiciones extremas era mayor. Para el 198 Au, la diferencia es menor debida a la menor atenuación lineal del agua para rayos gama de mayor energía. Al inducir la circulación de gas, y a medida que la velocidad de gas se incrementa, las series temporales incrementan su amplitud, pero en forma menos evidente que al utilizar una fuente radiactiva de menor energía. Las desviaciones positivas en el número de fotones debido a las burbujas ya no son tan evidentes en condiciones de régimen homogéneo (Figuras IV.1.9 (c) y IV.1.10 (c)). Para mayores velocidades de gas, se observa que la amplitud aumenta, evidenciándose también el aumento en el número de desviaciones positivas. El promedio también sube 116 progresivamente a medida que se incrementa la velocidad de gas entre las dos 240 240 220 220 200 200 Número de fotones Número de fotones condiciones extremas. 180 160 140 Columna vacía 120 100 60 0 200 400 600 t (unidades de tiempo) 800 140 60 0 1000 200 400 600 t (unidades de tiempo) 800 1000 240 220 220 ug = 0.09 m/s ug = 0.03 m/s 200 Número de fotones 200 180 160 (c) 140 120 180 140 120 100 80 80 200 400 600 t (unidades de tiempo) 800 1000 (d) 160 100 60 0 (b) 120 80 240 Número de fotones 160 100 (a) 80 ug = 0 m/s 180 60 0 200 400 600 t (unidades de tiempo) 800 1000 Figura IV.1.9. Series temporales de número de fotones para diferentes condiciones experimentales, adquiridas por el detector 1 en la configuración C1, utilizando la fuente de 198 Au de 30µCi, a una frecuencia de muestreo de 33 Hz. 117 80 70 70 Número de fotones Número de fotones 80 60 50 Columna vacía 40 30 40 60 t (unidades de tiempo) 80 100 (b) 40 0 20 40 60 t (unidades de tiempo) 80 100 80 ug = 0.03 m/s 60 50 (c) 40 ug = 0.09 m/s 70 Número de fotones 70 Número de fotones 50 20 20 80 30 20 0 60 30 (a) 20 0 ug = 0 m/s 60 (d) 50 40 30 20 20 40 60 t (unidades de tiempo) 80 100 0 20 40 60 t (unidades de tiempo) 80 100 Figura IV.1.10. Series temporales del número de fotones para diferentes condiciones experimentales típicas adquiridas por el detector 1 en la configuración C1, utilizando la fuente de 198Au, a una frecuencia de muestreo de 100 Hz. En la Figura IV.1.11 se presentan las funciones de densidad de probabilidades calculadas a partir de las series temporales del número de fotones utilizando 198Au como fuente radiactiva para el detector 1 en la configuración C1. La Figura IV.1.11(a) muestra las condiciones de operación extremas (columna vacía y columna llena de agua sin inyección de gas). Ambas series temporales llevan a funciones normales de densidad de probabilidades, características de fluctuaciones aleatorias alrededor de un promedio. En esta figura se pone de manifiesto que la diferencia entre los promedios de ambas series difieren pero que están más próximas que en el caso del 241 Am. Las Figuras IV.1.11 (b), (c) y (d) muestran nuevamente las funciones de densidad de probabilidades para algunas condiciones características: la menor velocidad de gas examinada en régimen homogéneo; una condición de transición y la mayor velocidad de gas examinada en régimen heterogéneo. 118 3500 3500 Número de eventos ug = 0 m/s 3000 Columna vacía 2500 2000 (a) 1500 1000 Número de eventos 3000 500 2000 1500 100 150 Número de fotones 0 200 3500 3500 3000 3000 ug = 0.06 m/s 2500 2000 1500 (c) 1000 500 0 (b) 1000 500 Número de eventos Número de eventos 0 ug = 0.02 m/s 2500 100 150 Número de fotones 200 ug = 0.13 m/s 2500 2000 1500 (d) 1000 500 100 150 Número de fotones 200 0 100 150 Número de fotones 200 Figura IV.1.11. Funciones de densidad de probabilidades del número de fotones adquiridos por el detector 1 en la configuración C1 utilizando la fuente de 198Au a una frecuencia de muestreo de 33Hz, para distintas condiciones de operación. Se observa que las funciones de densidad de probabilidades se ensanchan levemente hacia la derecha, evidenciándose mayores deformaciones cuando las velocidades de gas son relativamente altas. Cuando se comparan estas funciones de densidad de probabilidades con las calculadas para el 241Am (Figura IV.1.3) se observa que, en el caso del 241 Am, el apartamiento de la distribución normal comienza a evidenciarse a velocidades mucho menores y se alcanzan desviaciones más significativas para los caudales de gas altos. En la Figura IV.1.12 se calcularon los momentos muestrales al utilizar 198Au con el objetivo de analizar si, a pesar de que las funciones de densidad de probabilidades no muestran deformaciones muy marcadas, el método es todavía capaz de predecir la transición de régimen de flujo. La Figura IV.1.12 muestra los momentos muestrales para las mismas frecuencias de muestreo representativas que se mostraron para los experimentos con 241Am. 119 2nd2do order moment momento 1.2 1 M2_Au_10Hz M2_Au_33Hz 0.8 0.6 0.4 0.2 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug(m/s) 3rd 3er order moment momento 4th4to order moment momento 1.2 1.2 1 1 M3_Au_10Hz M3_Au_33Hz 0.8 M4_Au_10Hz M4_Au_33Hz 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0 0.02 0.04 ug(m/s) 0.06 0.08 0.1 0.12 0.14 ug(m/s) Figura IV.1.12. Momentos muestrales de orden dos, tres y cuatro determinados a partir de series temporales del número de fotones adquiridos por el detector 1 en la configuración C1 (distancia efectiva =10 cm) utilizando la fuente de 198Au para frecuencias de muestreo de 33Hz y 10Hz. A partir de la Figura IV.1.12, se encuentra que al utilizar una fuente de 198 Au (412 keV), los cuantificadores que mejor evidencian una transición en el régimen de flujo son el tercer y el cuarto momento, como en el caso del 241 Am. En este caso se observa un mayor efecto de la frecuencia de muestreo. Para los tres momentos muestrales calculados, los resultados mejoran a medida que disminuye la frecuencia de muestreo empezándose a encontrar buenos resultados a partir de la frecuencia de 33Hz y mejorando progresivamente a medida que ésta disminuye. Cuando se utiliza 198Au como fuente radiactiva, la sensibilidad para detectar una transición de flujo es menor que si se utiliza 241 Am, pero el quiebre en las tendencias 120 todavía es lo suficientemente claro como para diagnosticar el cambio en la fluidodinámica subyacente. Finalmente se utilizó una fuente radiactiva que emite rayos gama de alta energía, 46 Sc (picos característicos de 890 keV y 1120 keV), para analizar si puede determinarse el quiebre en las tendencias de los cuantificadores empleando fuentes de alta energía, las cuales serían de aplicación más efectiva en equipos grandes o sistemas trifásicos. Nuevamente, las cuentas son adquiridas por el detector 1 en la configuración C1, pero con la instrumentación necesaria como para adquirir simultáneamente las cuentas de fotones restringiendo el espectro energético a una ventana muy pequeña, para sólo captar el pico de 1120 KeV, o ampliando la ventana para obtener los dos picos característicos del radioisótopo. En la Figura IV.1.13 se observan 1000 puntos de las series temporales adquiridas a 33Hz para el caso de obtener conteo de ambos picos o de uno solo, para las condiciones de operación extremas, columna vacía y columna llena de agua (ug = 0m/s) . 90 90 Columna vacía (2P) 80 80 Número de fotones Número de fotones 60 50 40 30 0 0 ug = 0 m/s (1P) 60 50 40 30 20 20 10 ug = 0 m/s (2P) 70 70 10 Columna vacía (1P) 200 400 600 t (unidades de tiempo) 800 1000 0 0 200 400 600 t (unidades de tiempo) 800 1000 Figura IV.1.13. Series temporales de número de fotones para las condiciones de operación extremas bajo las dos restricciones diferentes del espectro de energía adquiridas simultáneamente por el detector 1 en la configuración C1, utilizando la fuente de 46Sc, a una frecuencia de muestreo de 33 Hz. En la Figura IV.1.13 se observa para ambas condiciones de operación extremas que el efecto de restringir el espectro de energía del 46Sc de dos picos a uno tiene como consecuencia que el número de cuentas de fotones promedio disminuya tres veces en ambas condiciones de operación. 121 La Figura IV.1.14 muestra las FDP calculadas a partir de las series de fotones adquiridas con la columna vacía y con la columna llena de agua con velocidad de gas cero a tres frecuencias de muestreo representativas para las diferentes restricciones energéticas. En la Figura IV.1.14 se evidencia por qué en el caso de utilizar fuentes con relativamente baja actividad, la frecuencia de muestreo se vuelve un parámetro más importante. Esta disminución en el número de cuentas disminuye la relación señal/ruido y, en consecuencia, es conveniente registrar los fotones sin restringir el espectro de energías consideradas. A medida que aumenta la frecuencia de muestreo, las FDP de las condiciones extremas se van superponiendo, empeorando aún más la situación cuando sólo se adquieren las cuentas del pico de mayor energía. La Figura IV.1.15 muestra series temporales de cuentas de fotones adquiridas a 33Hz en las mismas condiciones típicas de operación que se mostraron para los casos del 241 Am en la Figura IV.1.1 y para el 198 Au en la Figura IV.1.9. Se observa en las Figuras IV.1.15 (a) y IV.1.15 (b) que el promedio del número de fotones que atraviesan la columna vacía y la columna llena de agua son prácticamente el doble como en el caso del 198Au. En este caso, si bien existe un aumento paulatino de la amplitud de las series a medida que aumenta la velocidad de gas, el mismo no es notorio a simple vista. 122 2P 10 Hz 4000 3500 3500 3000 ug= 0 m/s Numero de eventos Numero de eventos 1P 10 Hz 4000 Columna vacia 2500 2000 1500 1000 ug= 0 m/s Columna vacia 2500 2000 1500 1000 500 500 0 0 3000 20 40 60 80 Numero de fotones 100 0 50 120 100 1 P 33Hz 3500 Numero de eventos Numero de eventos ug = 0 m/s Columna vacia 2500 2000 1500 1000 500 3000 2000 1500 1000 500 10 20 30 Numero de fotones 40 0 0 50 20 1P 100Hz 3500 3500 3000 ug = 0 m/s 3000 2500 Columna vacia 2000 40 60 Numero de fotones 80 100 2P 100 Hz 4000 Numero de eventos Numero de eventos Columna vacia ug= 0 m/s 2500 4000 1500 1000 500 0 0 300 4000 3000 0 0 250 2P 33 Hz 4000 3500 150 200 Numero de fotones 2500 ug = 0 m/s Columna vacia 2000 1500 1000 500 5 10 15 Numero de fotones 20 25 0 0 10 20 30 Numero de fotones 40 Figura IV.1.14. Función de densidad de probabilidades del número de fotones adquiridos por el detector 1 en la configuración C1 utilizando una fuente de 46Sc de 30 µCi para la columna vacía y llena de líquido. Efecto de restringir el espectro de energía a una ventana estrecha alrededor de 1120 KeV (1P), o usar una ventana que abarque a los dos picos característicos (2P). La frecuencia de muestreo: (a) y (b): 10Hz; (c) y (d): 33Hz; (c) y (f): 100Hz. 123 90 80 70 Número de fotones Número de fotones 80 90 Columna vacía 60 50 40 30 (a) 200 400 600 t (unidades de tiempo) 800 40 30 200 400 600 t (unidades de tiempo) 800 1000 80 ug = 0.03 m/s 60 Número de fotones Número de fotones (b) 50 90 80 (c) 50 40 30 20 10 0 60 10 0 1000 90 70 ug = 0 m/s 20 20 10 0 70 70 ug = 0.09 m/s (d) 60 50 40 30 20 200 400 600 t (unidades de tiempo) 800 10 0 1000 200 400 600 t (unidades de tiempo) 800 1000 Figura IV.1.15. Series temporales de número de fotones para diferentes condiciones experimentales adquiridas por el detector 1 en la configuración C1, utilizando la fuente de 46Sc, a una frecuencia de muestreo de 33 Hz. En las Figuras IV.1.16 y IV.1.17 se muestran las FDP calculadas a partir de las series temporales de fotones utilizando 46 Sc considerando la ventana de energía que incluye a los dos picos característicos, a 33Hz y 10Hz. Nuevamente no se aprecia una desviación de la normal tan evidente como en el caso del 241 Am. Para ambas frecuencias, pero especialmente para la menor, puede notarse una leve deformación para la condición de régimen heterogéneo (Figuras IV.1.16 (d) y IV.1.17 (d)). 124 2P 33 Hz 4000 3500 3500 Columna vacia ug= 0 m/s 3000 2500 2500 2000 2000 1500 1500 (a) 1000 (b) 1000 500 0 10 ug= 0.02 m/s Numero de eventos Numero de eventos 3000 2P 33 Hz 4000 500 30 50 70 0 10 90 30 2P 33 Hz 4000 70 90 2P 33 Hz 4000 3500 3500 3000 3000 ug= 0.13 m/s Numero de eventos Numero de eventos ug= 0.06 m/s 2500 2500 2000 2000 1500 1500 (c) 1000 (d) 1000 500 0 10 50 Numero de fotones Numero de fotones 500 30 50 Numero de fotones 70 90 0 10 30 50 70 90 Numero de fotones Figura IV.1.16. Funciones de densidad de probabilidades del número de fotones adquiridos por el detector 1 en la configuración C1 utilizando la fuente de 46Sc a una frecuencia de muestreo de 33Hz, para distintas condiciones de operación. 125 2P 10 Hz 2P 10 Hz 3500 3500 Columna vacia 2500 3000 Numero de eventos Numero de eventos 3000 ug= 0 m/s 2000 (a) 1500 1000 500 0 60 ug= 0.02 m/s 2500 2000 1500 (b) 1000 500 100 140 180 220 0 60 260 100 Numero de fotones 140 2P 10 Hz 220 260 2P 10 Hz 3500 3500 3000 3000 ug= 0.06 m/s Numero de eventos Numero de eventos 180 Numero de fotones 2500 2000 1500 (c) 1000 2500 ug= 0.13 m/s 2000 1500 1000 (d) 500 0 60 500 100 140 180 Numero de fotones 220 260 0 60 80 100 120 140 160 180 200 220 240 260 Numero de fotones Figura IV.1.17. Funciones de densidad de probabilidades del número de fotones adquiridos por el detector 1 en la configuración C1 utilizando la fuente de 46Sc a una frecuencia de muestreo de 10 Hz, para distintas condiciones de operación. En la Figura IV.1.18 se muestran los momentos muestrales calculados a partir de las series temporales de cuentas de fotones obtenidas con la fuente de alta energía para las diferentes condiciones experimentales, normalizados con el máximo valor calculado. A pesar de no evidenciarse una deformación muy notable en las FDP de las Figuras IV.1.16 y IV.1.17, todavía puede observarse un quiebre en las tendencias de los cuantificadores, sobre todo en el tercer momento. De todos modos, la variación es significativamente menor que para las fuentes de menor energía. Cabe destacar que este quiebre sólo fue observable para la frecuencia de 10Hz, poniéndose nuevamente de manifiesto que la frecuencia de muestreo se vuelve un parámetro importante a medida que disminuye la actividad y aumenta la energía de la fuente. 126 2nd2do order moment momento 1.2 1 0.8 0.6 0.4 M2_Sc_1P_10Hz 0.2 M2_Sc_2P_10Hz 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug(m/s) 3rd3er order moment momento 4th4to order moment momento 1.2 1.2 M3_Sc_1P_10Hz 1 M4_Sc_1P_10Hz 1 M3_Sc_2P_10Hz M4_Sc_2P_10Hz 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0 ug(m/s) 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug(m/s) Figura IV.1.18. Momentos muestrales de orden dos, tres y cuatro determinados a partir de las cuentas de fotones adquiridas por el detector 1 en la configuración C1 (distancia efectiva = 10cm) utilizando una fuente de 46Sc de 30 µCi. En la Figura IV.1.19 se resumen los resultados obtenidos para las tres fuentes. La figura muestra el fuerte efecto que la energía de la fuente utilizada tiene sobre el método de identificación de régimen de flujo. También evidencia que el tercer momento es el cuantificador más sensible frente a un cambio en la dinámica del sistema. Esta figura ilustra que los momentos muestrales calculados a partir de series temporales medidas con la fuente de baja energía presentarían un quiebre en su tendencia para el caudal de gas donde ocurre el comienzo de la transición de flujo. Las fuentes de mayor energía identifican la existencia de una transición cuando el régimen está más establecido, es decir, a mayores velocidades de gas. 127 2nd order moment 2do momento 1.2 1 Am_10Hz Au_10Hz Sc_10Hz 0.8 0.6 0.4 0.2 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug(m/s) 4th4to order moment momento 3rd order moment 3er momento 1.2 1.2 1 Am_10Hz 1 Au_10Hz Sc_10Hz 0.8 Am_10Hz Sc_10Hz 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 Au_10Hz 0 0 0.02 0.04 0.06 0.08 ug(m/s) 0.1 0.12 0.14 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug(m/s) Figura IV.1.19. Comparación de los momentos muestrales de orden dos, tres y cuatro determinados a partir de las cuentas de fotones adquiridas por el detector 1 en la configuración C1 (distancia efectiva =10 cm) utilizando fuentes radiactivas emisoras de rayos gama de distintas energías: 26 y 60 keV para el 241Am, 412 keV para el 198Au y 890 y 1120 keV para el 46 Sc. 128 IV.2. RPT IV.2.1. EXPERIMENTOS DE CALIBRACIÓN CON FUENTE DE 46SC Reconstrucción de las posiciones de calibración estáticas utilizando Monte Carlo Se realizaron calibraciones in situ en las 6 condiciones que se detallan en la Tabla III.3.3.1 de la sección experimental. En la Figura IV.2.1.1 se muestran las posiciones medidas y reconstruidas por Monte Carlo (ver Apéndice A para detalles del mecanismo de reconstrucción) utilizando los promedios de las cuentas acumuladas durante 30ms, medidas 300 veces para las 125 posiciones de calibración sin circulación de gas (ug = 0m/s). En la Figura IV.2.1.2 se grafica, para cada una de las coordenadas x, y, z, el valor medido versus el reconstruido a partir de los promedios de las cuentas, para la misma condición experimental. Los errores promedio calculados como diferencia absoluta entre las posiciones medidas y las reconstruidas con el promedio de las cuentas son: Error promedio en x (mm) = (1.62 +/- 1.20) mm; Error promedio en y (mm) = (1.68 +/- 2.04) mm; Error promedio en z (mm) = (2.28 +/- 1.37) mm; De los errores calculados puede verse que los errores en x e y son muy similares, mientras que el error en z es mayor. De todas formas, para cualquiera de las tres coordenadas los errores promedio de las posiciones de calibración estática reconstruidas a partir de los promedios de las cuentas adquiridas son menores que 4mm. En la Tabla IV.2.1.1 se muestran los errores promedio con su correspondiente desviación estándar para todas las condiciones experimentales estudiadas. 129 60 60 z = 150 mm 40 40 20 20 y (mm) y (mm) z = 50 mm 0 -60 -40 -20 0 20 40 60 0 -60 -40 -20 0 -20 -20 -40 -40 20 40 -60 -60 Medidas x (m m ) Medidas x (m m ) Reconstruidas Reconstruidas 60 60 z = 350 mm 40 40 20 20 y (mm) y (mm) z = 250 mm 0 -60 -40 -20 60 0 20 40 60 0 -60 -40 -20 0 -20 -20 -40 -40 -60 20 40 60 -60 Medidas x (m m ) x (m m ) Reconstruidas Medidas Reconstruidas 60 z = 450 mm 40 y (mm) 20 0 -60 -40 -20 0 20 40 60 -20 -40 -60 x (m m ) Medidas Reconstruidas Figura IV.2.1.1. Comparación de las posiciones medidas con las posiciones reconstruidas con Monte Carlo a partir de los promedios de las cuentas de las 125 posiciones de calibración para la condición ug = 0m/s. 130 50 25 0 -50 -25 0 25 -25 Error Prom = 1.62 DesvEst Error = 1.2 50 Y reconstruidas (mm) X reconstruidas (mm) 50 25 0 -50 -25 0 25 50 -25 Error Prom = 1.68 DesvEst Error = 2.04 -50 X medidas (mm) -50 Y medidas (mm) Z reconstruidas (mm) 500 Error Prom = 2.28 DesvEst Error = 1.37 0 Z medidas (mm) 0 500 Figura IV.2.1.2. Posiciones estáticas de calibración reconstruidas a partir de los promedios de las cuentas para la condición ug = 0m/s en función de las posiciones medidas. ug (m/s) Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) 0 1.62 1.20 1.68 2.04 2.28 1.37 0.02 1.51 1.18 1.64 1.90 2.26 1.30 0.04 1.64 1.22 1.56 1.89 2.66 1.71 0.06 1.61 1.25 1.60 1.18 2.73 1.86 0.08 1.77 1.46 1.93 2.37 2.76 1.86 0.12 1.86 1.36 1.98 2.03 2.79 1.85 Tabla IV.2.1.1. Errores promedio y desviación estándar del error de las posiciones reconstruidas a partir de los promedios de las cuentas adquiridas 300 veces durante 30ms. 131 Los resultados presentados evidencian la capacidad de la técnica implementada para determinar la posición estática de la partícula a partir del promedio de las cuentas medidas por los distintos detectores. Aunque hasta aquí los resultados son alentadores, cuando se reconstruye la posición en un experimento no se lo reconstruye a partir del promedio de las cuentas adquiridas repetidas veces a la frecuencia de muestreo, sino de las cuentas adquiridas en una única vez. Por este motivo se reconstruyeron las 125 posiciones de calibración 300 veces a partir de las cuentas que se habían utilizado para calcular los promedios. En la Figura IV.2.1.3 se pueden observar las posiciones (x, y) reconstruidas para las distintas posiciones axiales en las que se realizaron calibraciones. En azul se muestran las posiciones medidas, en verde las reconstruidas a partir de los promedios y en negro las posiciones reconstruidas como “instantáneas” (es decir que cada posición está reconstruida 300 veces a partir de las cuentas acumuladas durante el tiempo de muestreo, con las que se realizó el promedio). En la figura se puede observar como varía la resolución de la reconstrucción en (x, y) en las distintas posiciones axiales. En este punto es importante recordar que en esta configuración, los detectores fueron ubicados en dos filas de 4 aproximadamente a 100mm y a 400mm del distribuidor. Por lo tanto, existe una fila de detectores entre las posiciones axiales de calibración localizadas a 50mm y 150mm del distribuidor y otra entre 350mm y 450mm. La posición axial a 250mm del distribuidor es la única que no tiene detectores cerca y ésto se ve reflejado en la dispersión de las posiciones reconstruidas a partir de las cuentas “instantáneas” en esa posición axial. 132 60 60 z =150 mm 40 40 20 20 y (mm) y (mm) z = 50 mm 0 -60 -40 -20 0 20 40 60 0 -60 -40 -20 0 -20 -20 -40 -40 -60 20 Medidas Reconstruidas x (m m ) 60 60 z = 350 mm 40 40 20 20 y (mm) y (mm) z = 250 mm 0 -40 -20 60 -60 Medidas Reconstruidas x (m m ) -60 40 0 20 40 60 0 -60 -40 -20 0 -20 -20 -40 -40 -60 20 40 60 -60 Medidas Reconstruidas x (m m ) x (m m ) Medidas Reconstruidas 60 z = 450 mm 40 y (mm) 20 0 -60 -40 -20 0 20 40 60 -20 -40 -60 x (m m ) Medidas Reconstruidas Figura IV.2.1.3. Posiciones x, y medidas y reconstruidas con Monte Carlo a partir de los promedios de las cuentas de las 125 posiciones de calibración para la condición ug = 0m/s. Los puntos negros representan la reconstrucción de la posición a partir de las posiciones instantáneas, es decir, que cada una de las posiciones está reconstruida 300 veces. Los puntos verdes representan las posiciones reconstruidas con los promedios de las cuentas adquiridas para cada posición; y los puntos azules representan las posiciones medidas. 133 La Figura IV.2.1.4 muestra un análisis similar para la coordenada z. Se observa que la reconstrucción es apropiada excepto en algunos puntos que aparecen muy dispersos indicando una posición axial entre 350mm y 400mm por encima del distribuidor. 500 400 400 300 300 z (mm) z (mm) 500 200 200 100 100 0 0 -60 -40 -20 0 x (m m ) 20 40 Medidas Reconstruidas 60 -60 -40 -20 0 y (m m ) 20 40 60 Medidas Reconstruidas Figura IV.2.1.4. Coordenadas z vs x, y vs y medidas y reconstruidas. Los puntos negros representan las 300 posiciones “instantáneas” para cada punto reconstruido a partir del promedio de las 300 cuentas. Los puntos verdes representan las posiciones reconstruidas con los promedios de las cuentas adquiridas para cada posición; y los puntos azules representan las posiciones medidas. La Figura IV.2.1.5 muestra con mayor detalle los resultados presentados la Figura IV.2.1.4. En la misma se puede observar que para las posiciones instantáneas las peores reconstrucciones se obtienen en las posiciones extremas, donde no hay detectores arriba y abajo. En esta figura se aprecia que los puntos dispersos que aparecen entre 350mm y 400mm en realidad corresponden a la fuente ubicada a 450mm por encima del distribuidor. Esto remarca la importancia de distribuir los detectores de tal manera de abarcar toda la zona recorrida por el trazador a fin de tener en todas partes información apropiada de al menos dos de ellos. 134 500 500 Medidas z = 50 mm Reconstruidas 400 400 300 300 200 200 100 100 0 -60 -40 -20 0 0 20 40 60 -60 -40 -20 y (m m ) Medidas z = 250 mm 40 60 z = 350 mm Reconstruidas 400 300 300 z (mm) z (mm) 400 200 200 100 100 0 -20 20 500 Reconstruidas -40 0 y (m m ) 500 Medidas -60 z = 150 mm Reconstruidas z (mm) z (mm) Medidas 0 0 20 40 60 -60 -40 -20 y (m m ) 0 20 40 60 y (m m ) 500 400 z (mm) 300 200 100 Medidas z = 450 mm Reconstruidas 0 -60 -40 -20 0 20 40 60 y (m m ) Figura IV.2.1.5. Coordenadas z vs y medidas y reconstruidas para las 5 posiciones axiales de calibración. Los puntos negros representan las 300 posiciones “instantáneas” para cada punto reconstruido a partir del promedio de las 300 cuentas para la condición ug = 0m/s. Los puntos verdes representan las posiciones reconstruidas con los promedios de las cuentas adquiridas para cada posición; y los puntos azules representan las posiciones medidas. 135 La Tabla IV.2.1.2 muestra los promedios de los errores de las posiciones de calibración cuando se reconstruye a partir de las cuentas instantáneas para todas las condiciones estudiadas con todos los puntos y cuando se quitan los correspondientes a z = 50 mm y z = 450 mm. La motivación de estudiar el error de reconstrucción quitando las posiciones axiales extremas surge porque los desplazamientos axiales del trazador en los denominados experimentos de calibración dinámica (sección III.3.3) ocurren en esa zona axial intermedia de la columna. Se han denominado estas posiciones de calibración como: puntos en la región del movimiento axial. Todas las posiciones de calibración ug (m/s) Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) 0 2.24 1.99 2.63 2.70 3.01 5.80 0.02 2.32 2.06 2.68 2.72 2.98 5.13 0.04 2.46 3.05 2.80 2.84 3.02 4.87 0.06 2.47 2.26 2.87 2.93 3.01 4.41 0.08 2.56 2.36 3.01 3.21 3.07 4.50 0.12 2.68 2.51 3.04 3.11 3.25 5.03 (a) Puntos en la región del movimiento axial ug (m/s) Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) 0 2.48 2.20 2.85 2.66 2.62 2.05 0.02 2.56 2.28 2.91 2.73 2.67 2.23 0.04 2.80 3.70 3.07 2.93 2.77 2.67 0.06 2.78 2.55 3.18 3.03 2.77 2.23 0.08 2.86 2.64 3.17 3.04 2.81 2.36 0.12 3.05 2.87 3.39 3.29 2.97 2.96 (b) Tabla IV.2.1.2. Errores promedio junto con su correspondiente desviación estándar de las reconstrucciones de las 125 posiciones de calibración a partir de las 300 cuentas instantáneas registradas para cada una. 136 Reconstrucción del movimiento del trazador. Calibración dinámica Velocidades de referencia: Determinación de la velocidad axial del trazador a partir de las filmaciones del movimiento del pistón Como se mencionó en la sección III.3.3, la velocidad del pistón, considerada como la velocidad axial “verdadera” o de referencia del trazador para los experimentos de calibración dinámica, fue determinada analizando las filmaciones del movimiento cuadro por cuadro. Cada película se disgregó en su secuencia de imágenes, promediando el tiempo entre cuadros. Para realizar el análisis de cada imagen y determinar el movimiento entre imagen e imagen se tomó como referencia un objeto que apareciera en todas las imágenes y que su movimiento fuera fácilmente identificable. La Figura IV.2.1.6 muestra el elemento tomado como referencia. Objeto de referencia Figura IV.2.1.6. Objeto utilizado como referencia para realizar el análisis de cada imagen disgregada de la filmación del movimiento del pistón. El recorrido del objeto de referencia para un movimiento ascendente y descendente fue determinado utilizando papel milimetrado. Los desplazamientos de dicho objeto fueron registrados cuadro por cuadro, desechando el movimiento de los extremos del recorrido, es decir antes y después del accionamiento de las válvulas. En estos puntos se da un efecto de aceleración/desaceleración. Por lo tanto, la velocidad fue calculada en el intervalo donde el sistema impone un movimiento estable para el trazador. Las velocidades de ambos movimientos (ascendentes y descendentes) fueron 137 estimadas a partir de al menos 10 recorridos totales para cada uno de los casos. En la Tabla IV.2.1.3 se enumeran las velocidades estimadas mediante este método con sus respectivas desviaciones estándar. Movimiento Ascendente Velocidad Estudiada Movimiento Descendente Velocidad (m/s) Desviación Estándar (m/s) Velocidad (m/s) Desviación Estándar (m/s) N1 0.174 0.011 0.149 0.002 N2 0.309 0.022 0.297 0.012 N3 0.627 0.067 0.653 0.050 N4 0.963 0.113 1.120 0.133 Tabla IV.2.1.3. Velocidades del pistón utilizadas, estimadas a partir del análisis cuadro por cuadro de las imágenes de la filmación del movimiento. La Tabla IV.2.1.3 muestra que la desviación estándar se incrementa a medida que la velocidad del cilindro es mayor; es decir, las velocidades más altas están determinadas con mayor indeterminación. Este efecto se debe a varios factores relacionados principalmente con el limitado número de cuadros por segundo de la filmadora utilizada. En primer lugar, el número de cuadros que describe la distancia total recorrida por el pistón (objeto de referencia) en un movimiento ascendente o descendente, decrece drásticamente a medida que la velocidad crece. Adicionalmente, para las velocidades más altas, el objeto de referencia pierde definición en la imagen, incrementando la incertidumbre en la determinación de su posición. Velocidades reconstruidas: Determinación de la velocidad del trazador a partir de las trayectorias reconstruidas En la Figura IV.2.1.7 se representan 15s de las posiciones axiales reconstruidas, para cada una de de las cuatro velocidades impuestas, cuando la velocidad de gas es nula (ug = 0m/s). La Figura IV.2.1.7 muestra claramente que el método de reconstrucción es capaz de identificar las variaciones de velocidad impuestas al pistón. Las excursiones hacia arriba y hacia abajo son evidentes y la frecuencia de los mismos se incrementa al aumentar la velocidad del pistón. En las Figuras IV.2.1.8 a IV.2.1.10 se 138 muestran los resultados obtenidos con circulación de gas para tres situaciones representativas: una condición en régimen homogéneo (Figura IV.2.1.8), una condición próxima a la transición (Figura IV.2.1.9) y una condición en el régimen heterogéneo (Figura IV.2.1.10). En todas ellas se observan tendencias similares. Las figuras muestran que, independientemente de la condición hidrodinámica examinada, la velocidad impuesta al pistón del cilindro se refleja en el movimiento reconstruido. Se evidencian los movimientos hacia arriba y hacia abajo y la frecuencia de las subidas y bajadas aumenta a medida que la velocidad del pistón se incrementa. 139 500 ug = 0 m/s z (mm) 400 300 200 100 N1 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0 m/s z (mm) 400 300 200 100 N2 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0 m/s z (mm) 400 300 200 100 N3 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0 m/s z (mm) 400 300 200 100 N4 0 0 2 4 6 8 10 12 14 t (s) Figura IV.2.1.7. Coordenada axial reconstruida vs tiempo para distintas velocidades del pistón cuando ug = 0m/s. 140 500 ug = 0.02 m/s z (mm) 400 300 200 100 N1 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0.02 m/s z (mm) 400 300 200 100 N2 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0.02 m/s z (mm) 400 300 200 100 N3 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0.02 m/s z (mm) 400 300 200 100 N4 0 0 2 4 6 8 10 12 14 t (s) Figura IV.2.1.8. Coordenada axial reconstruida vs tiempo para distintas velocidades del pistón cuando ug = 0.02m/s (régimen homogéneo). 141 500 ug = 0.06 m/s z (mm) 400 300 200 100 N1 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0.06 m/s z (mm) 400 300 200 100 N2 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0.06 m/s z (mm) 400 300 200 100 N3 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0.06 m/s z (mm) 400 300 200 100 N4 0 0 2 4 6 8 10 12 14 t (s) Figura IV.2.1.9. Coordenada axial reconstruida vs tiempo para distintas velocidades del pistón cuando ug = 0.06m/s (transición). 142 500 ug = 0.12 m/s z (mm) 400 300 200 100 N1 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0.12 m/s z (mm) 400 300 200 100 N2 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0.12 m/s z (mm) 400 300 200 100 N3 0 0 2 4 6 8 10 12 14 t (s) 500 ug = 0.12 m/s z (mm) 400 300 200 100 N4 0 0 2 4 6 8 10 12 14 t (s) Figura IV.2.1.10. Coordenada axial reconstruida vs tiempo para distintas velocidades del pistón cuando ug = 0.12m/s (régimen heterogéneo). 143 Las velocidades de ascenso/descenso del trazador se estiman a partir de las variaciones temporales de las coordenadas axiales reconstruidas, para cada velocidad del pistón y para cada una de las velocidades de gas examinadas. En la estimación de las velocidades, sólo se consideraron las excursiones entre z = 200 mm y z = 350 mm. Las posiciones axiales que caen fuera de este rango se desprecian a fin de eliminar el efecto de aceleración/desaceleración que se produce al accionar las válvulas antes de que se invierta la dirección del movimiento; es decir, sólo se estiman velocidades en la zona donde la velocidad es constante. Las velocidades axiales fueron calculadas por tres procedimientos distintos: i.- por diferenciación continua (nomenclado X2); es decir, calculando las diferencias entre dos posiciones sucesivas: v z (X2) = zi+1 − zi T ; i =1,2,...., N -1 (IV.2.1.1) siendo N el número total de posiciones medidas en un ascenso o descenso y T la frecuencia de muestreo. ii.- por diferenciación de posiciones ligeramente separadas en el tiempo, en este caso separadas 4 unidades (nomenclada X4): v z (X4) = zi+3 − zi 3T ; i =1,2,...., N -3 (IV.2.1.2) iii.- a partir de la pendiente de una estimación lineal por cuadrados mínimos de la variación temporal de la coordenada axial, considerando todas las posiciones medidas (N) para una dada excursión ascendente o descendente (nomenclado LS). Los resultados positivos corresponden a las velocidades calculadas durantes los periodos de ascenso, y los negativos corresponden a los descensos. La Figura IV.2.1.11 ilustra las funciones de densidad de probabilidades (FDPs) de las velocidades axiales del trazador calculadas por los tres procedimientos, para el caso de mover el trazador en un medio líquido estanco (ug = 0 m/s) a diferentes velocidades. Sobre las distribuciones, se muestran las velocidades de referencia calculadas mediante las filmaciones del pistón, con su correspondiente desviación estándar. Claramente, se observa en la Figura IV.2.1.11 que la mejor metodología para estimar la velocidad de un dado movimiento es 144 considerar las pendientes de una tendencia lineal de la coordenada axial vs tiempo, dado que para estos casos se encuentran que las FDP son muy angostas y siempre caen debajo del intervalo de confianza de la velocidad de referencia. La coincidencia con las velocidades determinadas por las filmaciones es excelente. Cuando se calculan las velocidades axiales por diferenciación (X2), la dispersión de las FDP aumenta ampliamente debido a la alta influencia de la indeterminación en la posición de la partícula y esto es más evidente para las velocidades del trazador más bajas. Este efecto puede ser reducido sustancialmente con el simple hecho de considerar instantes ligeramente separados, a juzgar por las FDPs correspondientes a las velocidades calculadas por la ecuación IV.2.1.2. En un experimento donde el trazador se mueve libremente en una emulsión multifásica, el principio y el fin de un movimiento rápido debe ser delineado a partir de un movimiento instantáneo y es generalmente útil caer en diferenciación instantánea para decidir cuales son los límites. Pero, al utilizar algoritmos para calcular las velocidades de movimientos rápidos deberá preferentemente utilizarse diferenciación sucesiva para marcar los límites y luego recalcular las velocidades a partir de la pendiente de la dependencia lineal estimada. La influencia de la velocidad de gas en las FDPs de las velocidades axiales del trazador se ejemplifica en la Figura IV.2.1.12, para una condición perteneciente al régimen de flujo homogéneo, y en la Figura IV.2.1.13 para una correspondiente al régimen de flujo heterogéneo (condición más extrema estudiada en estos experimentos). La precisión en la estimación de la velocidad en el régimen de flujo homogéneo es totalmente análoga a la obtenida para la condición de líquido estanco (ug = 0m/s), para todas las velocidades del pistón estudiadas. Para condiciones de régimen heterogéneo, la precisión permanece similar a la que se encuentra para líquido estanco, indicando que la heterogeneidad de la emulsión utilizada (agua-aire) tiene un efecto despreciable en la estimación de las velocidades altas del trazador. 145 N4 / X2 N3 / X2 0.4 0.35 0.25 (a) (d) ug = 0 m/s 0.25 0.2 0.15 Frequency Frecuencia Frequency 0.3 Frecuencia ug = 0m/s 0.2 0.1 0.15 0.1 0.05 0.05 0 -3 -2 -1 0 1 Velocity (m/s) 2 0 -1.5 3 -1 Velocidad (m/s) N4 / X4 (e) (b) ug = 0m/s 0.2 Frecuencia 0.25 0.2 0.15 Frequency Frequency 1.5 0.25 0.3 Frecuencia 1 N3 / X4 0.4 0.35 -0.5 0 0.5 Velocity (m/s) Velocidad (m/s) 0.15 0.1 ug = 0 m/s 0.1 0.05 0.05 0 -3 -2 -1 0 1 Velocity (m/s) Velocidad (m/s) 2 0 -1.5 3 -1 N4 / LS (f) (c) ug = 0m/s 0.2 Frecuencia 0.25 Frequency Frequency 1.5 0.25 0.3 Frecuencia 1 N3 / LS 0.4 0.35 -0.5 0 0.5 Velocity (m/s) Velocidad (m/s) 0.2 0.15 0.15 0.1 ug = 0 m/s 0.1 0.05 0.05 0 -3 -2 -1 0 1 Velocity (m/s) Velocidad (m/s) 2 3 0 -1.5 -1 -0.5 0 0.5 Velocity (m/s) 1 1.5 Velocidad (m/s) Figura IV.2.1.11. Funciones de densidad de probabilidad (FDPs) de las velocidades axiales del trazador estimadas a partir de las trayectorias reconstruidas, utilizando los procedimientos descriptos en el texto (X2, X4 y LS). Velocidad del gas, ug = 0m/s. Velocidad del pistón: (a-c) N4; (d-f) N3; (g-i) N2; (j-l) N1. 146 N2 / X2 N1 / X2 0.8 0.6 (g) 0.7 0.6 0.4 0.3 ug = 0m/s 0.2 Frequency Frecuencia Frequency 0.5 Frecuencia (j) 0.5 ug = 0 m/s 0.4 0.3 0.2 0.1 0.1 0 -1 -0.5 0 Velocity (m/s) Velocidad (m/s) 0.5 0 1 -0.4 -0.2 0 0.2 Velocity (m/s) 0.4 0.6 Velocidad (m/s) N2 / X4 N1 / X4 0.8 0.6 (h) 0.7 0.6 0.4 ug = 0m/s 0.3 0.2 Frequency Frecuencia Frequency 0.5 Frecuencia (k) 0.5 ug = 0 m/s 0.4 0.3 0.2 0.1 0.1 0 -1 -0.5 0 Velocity (m/s) Velocidad (m/s) 0.5 0 1 -0.4 -0.2 N2 / LS (i) 0.7 0.6 (l) 0.6 0.4 0.3 ug = 0m/s 0.2 Frequency Frecuencia Frequency Frecuencia 0.4 0.8 0.5 0.5 0.4 ug = 0m/s 0.3 0.2 0.1 0 -1 0.2 N1 / LS 0.7 0.6 0 Velocity (m/s) Velocidad (m/s) 0.1 -0.5 0 Velocity (m/s) Velocidad (m/s) 0.5 1 0 -0.4 -0.2 0 0.2 Velocity (m/s) 0.4 0.6 Velocidad (m/s) Figura IV.2.1.11. Funciones de densidad de probabilidad (FDPs) de las velocidades axiales del trazador estimadas a partir de las trayectorias reconstruidas, utilizando los procedimientos descriptos en el texto (X2, X4 y LS). Velocidad del gas, ug = 0m/s. Velocidad del pistón: (a-c) N4; (d-f) N3; (g-i) N2; (j-l) N1. 147 N1/ X2 N4 / X2 0.5 (a) 0.6 (d) 0.4 0.5 0.3 0.2 Frequency Frecuencia Frequency Frecuencia ug = 0.02 m/s ug = 0.02 m/s 0.4 0.3 0.2 0.1 0.1 0 -3 -2 -1 2 0 3 -0.4 -0.2 0 0.2 Velocity (m/s) Velocidad (m/s) Velocidad (m/s) N4 / X4 N1 / X4 0.5 0.4 0 1 Velocity (m/s) (b) 0.6 ug = 0.02 m/s 0.4 0.6 (e) 0.3 0.2 Frequency Frecuencia Frequency Frecuencia 0.5 ug = 0.02 m/s 0.4 0.3 0.2 0.1 0.1 0 -3 -2 -1 0 1 Velocity (m/s) Velocidad (m/s) 2 0 3 -0.4 -0.2 0 0.2 0.4 0.6 Velocity (m/s) Velocidad (m/s) N1/ LS N4 / LS 0.7 0.5 (c) 0.6 (f) 0.4 0.5 0.3 0.2 Frequency Frecuencia Frequency Frecuencia ug = 0.02 m/s ug = 0.02 m/s 0.4 0.3 0.2 0.1 0.1 0 -3 -2 -1 0 1 Velocity (m/s) Velocidad (m/s) 2 3 0 -0.4 -0.2 0 0.2 Velocity (m/s) 0.4 0.6 Velocidad (m/s) Figura IV.2.1.12. Funciones de densidad de probabilidad (FDPs) de las velocidades axiales del trazador estimadas a partir de las trayectorias reconstruidas, utilizando los procedimientos descriptos en el texto (X2, X4 y LS). Velocidad del gas, en régimen de flujo homogéneo. Velocidad del pistón: (a-c) N4; (d-f) N1. 148 N1 / X2 N4 / X2 0.8 0.4 ug = 0.12 m/s (a) 0.7 0.6 0.25 0.5 0.2 0.15 Frequency 0.3 Frecuencia Frequency Frecuencia 0.35 0.05 0.1 -1 0 1 Velocity (m/s) Velocidad (m/s) 2 0 3 0.7 0.6 0.25 0.5 0.2 0.15 Frequency 0.3 Frecuencia Frequency ug = 0.12 m/s 0.05 0.1 0 1 2 0 3 (e) ug = 0.12 m/s -0.4 Velocity (m/s) -0.2 (c) 0.7 ug = 0.12 m/s 0.6 0.2 0.15 Frequency 0.25 0.4 0.3 0.2 0.05 0.1 -1 0 1 Velocity (m/s) Velocidad (m/s) 2 3 ug = 0.12 m/s 0.5 0.1 -2 (f) 0.6 Frecuencia Frequency 0.4 0.8 0.3 Frecuencia 0.2 N1 / LS N4 / LS 0.4 0 -3 0 Velocity (m/s) Velocidad (m/s) Velocidad (m/s) 0.35 0.6 0.3 0.2 -1 0.4 0.4 0.1 -2 0 0.2 Velocity (m/s) 0.8 (b) 0 -3 -0.2 N1 / X4 N4 / X4 0.35 -0.4 Velocidad (m/s) 0.4 Frecuencia 0.3 0.2 -2 ug = 0.12 m/s 0.4 0.1 0 -3 (d) 0 -0.4 -0.2 0 0.2 Velocity (m/s) 0.4 0.6 Velocidad (m/s) Figura IV.2.1.13. Funciones de densidad de probabilidad (FDPs) de las velocidades axiales del trazador estimadas a partir de las trayectorias reconstruidas, utilizando los procedimientos descriptos en el texto (X2, X4 y LS). Velocidad del gas, en régimen de flujo heterogéneo. Velocidad del pistón: (a-c) N4; (d-f) N1. En la Figura IV.2.1.14 se muestran, para todas las condiciones de operación estudiadas, los promedios de las velocidades obtenidas por estimación lineal, para las cuatro velocidades impuestas. En la misma, se evidencia, para cada velocidad del 149 pistón, que las velocidades axiales reconstruidas son muy consistentes entre si para las distintas velocidades de gas estudiadas, aunque la velocidad superficial de gas pertenezca a una condición en el régimen homogéneo o heterogéneo, o sin flujo de gas. La Tabla IV.2.1.4 proporciona comparaciones cuantitativas entre las velocidades axiales promedio del trazador, calculadas a partir de las posiciones reconstruidas y a partir de las filmaciones, para todas las condiciones estudiadas. Se aprecia el excelente acuerdo entre las dos metodologías, que sustentan la calidad de la reconstrucción de la posición. Estos resultados indican que las velocidades axiales del trazador calculadas a partir de los ascensos y descensos rápidos, son estimadas satisfactoriamente con el equipo de RPT implementado en el CAC. 150 Velocidad reconstruida (m/s) 0.8 0.3 -0.2 0 0.02 0.04 0.06 0.08 0.12 -0.7 Velocidad impuesta N1 (a) -1.2 Velocidad reconstruida (m/s) Movimiento ascendente Movimiento descendente 0.8 0.3 -0.2 0 0.02 0.04 0.06 0.12 (b) Velocidad impuesta N2 Movimiento ascendente Velocidad reconstruida (m/s) 0.08 -0.7 -1.2 ug (m/s) Movimiento descendente 0.8 0.3 -0.2 0 0.02 0.04 0.06 0.08 0.12 -0.7 (c) Velocidad impuesta N3 -1.2 Movimiento ascendente Velocidad reconstruida (m/s) ug (m/s) Movimiento descendente ug (m/s) 0.8 0.3 -0.2 0 0.02 0.04 0.06 0.08 0.12 -0.7 (d) Velocidad impuesta N4 -1.2 Movimiento ascendente Movimiento descendente ug (m/s) Figura IV.2.1.14. Velocidad reconstruida promedio para las diferentes velocidades de gas analizadas, para cada una de las velocidades del pistón estudiadas (a): N1; (b): N2; (c): N3 y (d): N4 151 N1 Velocidad superficial de gas (m/s) 0 0.02 0.04 0.06 0.08 0.12 Movimiento Ascendente Velocidad media Velocidad media impuesta (m/s) reconstruida (m/s) 0.174 +/- 0.011 0.174 +/- 0.005 0.174 +/- 0.011 0.174 +/- 0.004 0.174 +/- 0.011 0.174 +/- 0.005 0.174 +/- 0.011 0.174 +/- 0.006 0.174 +/- 0.011 0.174 +/- 0.004 0.174 +/- 0.011 0.172 +/- 0.004 Movimiento Descendente Velocidad media Velocidad media impuesta (m/s) reconstruida (m/s) 0.149 +/- 0.002 0.147 +/- 0.003 0.149 +/- 0.002 0.145 +/- 0.002 0.149 +/- 0.002 0.144 +/- 0.002 0.149 +/- 0.002 0.145 +/- 0.002 0.149 +/- 0.002 0.145 +/- 0.003 0.149 +/- 0.002 0.147 +/- 0.002 N2 Velocidad superficial de gas (m/s) 0 0.02 0.04 0.06 0.08 0.12 Movimiento Ascendente Velocidad media Velocidad media impuesta (m/s) reconstruida (m/s) 0.309 +/- 0.022 0.304 +/- 0.007 0.309 +/- 0.022 0.300 +/- 0.017 0.309 +/- 0.022 0.303 +/- 0.008 0.309 +/- 0.022 0.308 +/- 0.007 0.309 +/- 0.022 0.307 +/- 0.007 0.309 +/- 0.022 0.308 +/- 0.008 Movimiento Descendente Velocidad media Velocidad media impuesta (m/s) reconstruida (m/s) 0.297 +/- 0.012 0.297 +/- 0.006 0.297 +/- 0.012 0.289 +/- 0.006 0.297 +/- 0.012 0.295 +/- 0.007 0.297 +/- 0.012 0.297 +/- 0.007 0.297 +/- 0.012 0.296 +/- 0.007 0.297 +/- 0.012 0.297 +/- 0.007 N3 Velocidad superficial de gas (m/s) 0 0.02 0.04 0.06 0.08 0.12 Movimiento Ascendente Velocidad media Velocidad media impuesta (m/s) reconstruida (m/s) 0.627 +/- 0.067 0.602 +/- 0.019 0.627 +/- 0.067 0.599 +/- 0.020 0.627 +/- 0.067 0.600 +/- 0.023 0.627 +/- 0.067 0.606 +/- 0.022 0.627 +/- 0.067 0.603 +/- 0.023 0.627 +/- 0.067 0.602 +/- 0.025 Movimiento Descendente Velocidad media Velocidad media impuesta (m/s) reconstruida (m/s) 0.653 +/- 0.050 0.668 +/- 0.023 0.653 +/- 0.050 0.655 +/- 0.035 0.653 +/- 0.050 0.643 +/- 0.036 0.653 +/- 0.050 0.629 +/- 0.026 0.653 +/- 0.050 0.621 +/- 0.023 0.653 +/- 0.050 0.628 +/- 0.032 N4 Velocidad superficial de gas (m/s) 0 0.02 0.04 0.06 0.08 0.12 Movimiento Ascendente Velocidad media Velocidad media impuesta (m/s) reconstruida (m/s) 0.963 +/- 0.113 0.962 +/- 0.050 0.963 +/- 0.113 0.948 +/- 0.053 0.963 +/- 0.113 0.915 +/- 0.043 0.963 +/- 0.113 0.927 +/- 0.044 0.963 +/- 0.113 0.873 +/- 0.040 0.963 +/- 0.113 0.911 +/- 0.051 Movimiento Descendente Velocidad media Velocidad media impuesta (m/s) reconstruida (m/s) 1.12 +/- 0.133 1.131 +/- 0.066 1.12 +/- 0.133 1.116 +/- 0.063 1.12 +/- 0.133 1.080 +/- 0.062 1.12 +/- 0.133 1.093 +/- 0.067 1.12 +/- 0.133 1.046 +/- 0.067 1.12 +/- 0.133 1.132 +/- 0.081 Tabla IV.2.1.4. Comparación entre las velocidades reconstruidas promedio y las impuestas al pistón. 152 IV.2.2. EXPERIMENTOS DE CALIBRACIÓN CON FUENTE DE 198AU Para las configuraciones de detectores A, B y C se reconstruyeron las posiciones estáticas intermedias que se muestran en la Figura III.3.4.5 medidas en agua (ug = 0m/s), con el algoritmo Cross Correlation propuesto e implementado por Bhusarapu (2005). En la sección III.3.4 se explicaron las razones para la utilización de este algoritmo en la comparación. Detalles del mecanismo de reconstrucción se pueden consultar en el Apéndice A. En la Tabla IV.2.2.1 se muestran los errores promedio calculados como diferencia absoluta entre las posiciones medidas y las reconstruidas para las coordenadas x, y, z cuando se las reconstruye a partir de los promedios de las cuentas de las 50 posiciones de calibración intermedias para las 3 configuraciones de detectores estudiadas. En la Tabla IV.2.2.1(a) se muestra el error promedio de las 50 posiciones, mientras que en la Tabla IV.2.2.1(b) se han quitado aquellas posiciones de z = 50mm y z = 450mm del distribuidor. Lo primero que se observa, para cualquiera de las tres configuraciones de detectores, es que el error en z aumenta fuertemente en las posiciones axiales extremas, donde no hay detectores por encima o por debajo. Bhusarapu (2005) había hecho la misma reconstrucción para validar su algoritmo y compararla con el algoritmo de Monte Carlo en un riser obteniendo los siguientes errores: Error promedio en x (mm) = (4.8 +/- 5)mm (Cross Correlation); (13 +/- 18)mm (Monte Carlo) Error promedio en y (mm) = (4.4 +/- 5)mm (Cross Correlation); (12 +/- 11)mm (Monte Carlo) Error promedio en z (mm) = (4.5 +/- 8)mm (Cross Correlation); (15 +/- 19)mm (Monte Carlo) 153 Todas las posiciones Configuración Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) A 3.45 2.95 2.98 2.41 12.59 17.14 B 3.84 3.57 2.94 2.56 5.85 9.81 C 3.00 2.20 3.28 2.95 7.61 10.53 (a) Puntos en la región del movimiento axial Configuración Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) A 2.90 2.42 2.43 2.33 5.04 4.79 B 3.16 1.62 2.34 1.57 2.06 1.31 C 2.45 1.67 3.21 3.12 3.14 2.57 (b) Tabla IV.2.2.1. Errores calculados para la reconstrucción de las 50 posiciones adicionales tomadas durante la calibración para las 3 configuraciones de detectores estudiadas. (a) Todas las posiciones de calibración. (b) Posiciones de calibración en la región del movimiento axial. Los resultados de Bhusarapu (2005) mostraban que para las coordenadas x e y los errores en la determinación no dependían fuertemente de la posición. Para la coordenada axial, el resultado era similar cuando se utilizaba la reconstrucción de Monte Carlo, mientras que al utilizar el algoritmo Cross Correlation, los errores eran despreciables para las posiciones intermedias de z, y muy altos para las posiciones extremas donde no hay más detectores. Sus resultados indican que el algoritmo Cross Correlation es más sensible a este efecto que el de Monte Carlo. Cabe aclarar que para los experimentos descriptos en la sección IV.2.1 con el 46 Sc como fuente radiactiva, y donde se reconstruyó con Monte Carlo, este efecto no era observable cuando se reconstruía a partir de los promedios de las cuentas y sólo se hacía un poco evidente al reconstruir a partir de las mediciones instantáneas, donde el error es mayor, siendo de todas formas un bajo porcentaje. En consecuencia, el algoritmo Cross Correlation conduce a mayor error en los extremos axiales que el de Monte Carlo ya que fue evidenciado por Bhusarapu (2005) 154 utilizando escandio y en este trabajo al utilizar oro, desprendiéndonos así de la hipótesis de que la causa se deba al cambio de energía de la fuente. La distribución de los errores puede verse en las Figuras IV.2.2.1 a IV.2.2.3 en función de las coordenadas z y r para cada una de las configuraciones estudiadas. En estas figuras se observa claramente, para la coordenada z, el aumento del error axial en los extremos y cómo es posible reducirlo, ya sea reacomodando el mismo número de detectores en una forma más eficiente (Configuración B), o bien agregando más detectores como en el caso de la Configuración C. Asimismo, de las Figuras IV.2.2.1 a IV.2.2.3 se infiere que el hecho de cambiar la configuración no tiene gran influencia sobre la reconstrucción de las coordenadas x e y. Cabe aclarar que más allá de la configuración utilizada, los errores promedio encontrados caen siempre dentro de los límites admisibles para la técnica de RPT, siendo excesivos únicamente para algunas posiciones axiales extremas, principalmente en la región próxima a la pared de la columna. 155 20 20 Configuración A Configuración A 15 Error en x (mm) Error en x (mm) 15 10 5 10 5 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 20 z (m m ) 25 40 45 50 r (m m ) Configuración A Configuración A 15 15 Error en y (mm) Error en y (mm) 35 20 20 10 5 10 5 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 z (m m ) 20 25 30 35 40 45 50 r (m m ) 100 100 90 90 Configuración A Configuración A 80 80 70 70 Error en z (mm) Error en z (mm) 30 60 50 40 30 60 50 40 30 20 20 10 10 0 0 0 50 100 150 200 250 300 350 400 450 500 z (m m ) 0 5 10 15 20 25 30 35 40 45 50 r (m m ) Figura IV.2.2.1. Distribución de errores promedio en función de las coordenadas axial (z) y radial (r) para la configuración de detectores A. Líquido en batch; ug = 0 m/s. 156 20 20 Configuración B Configuración B 15 Error en x (mm) Error en x (mm) 15 10 5 10 5 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 20 z (m m ) 25 40 45 50 r (m m ) Configuración B Configuración B 15 Error en y (mm) 15 10 5 10 5 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 z (m m ) 20 25 30 35 40 45 50 r (m m ) 100 100 90 90 Configuración B Configuración B 80 80 70 70 Error en z (mm) Error en z (mm) 35 20 20 Error en y (mm) 30 60 50 40 30 60 50 40 30 20 20 10 10 0 0 0 50 100 150 200 250 300 350 400 450 500 z (m m ) 0 5 10 15 20 25 30 35 40 45 50 r (m m ) Figura IV.2.2.2. Distribución de errores promedio en función de las coordenadas axial (z) y radial (r) para la configuración de detectores B. Líquido en batch; ug = 0 m/s. 157 20 20 Configuración C Configuración C 15 Error en x (mm) Error en x (mm) 15 10 10 5 5 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 20 z (m m ) 25 40 45 50 r (m m ) Configuración C Configuración C 15 Error en y (mm) 15 Error en y (mm) 35 20 20 10 5 10 5 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 z (m m ) 20 25 30 35 40 45 50 r (m m ) 100 100 90 90 Configuración C 80 80 70 70 Error en z (mm) Error en z (mm) 30 60 50 40 30 60 50 40 30 20 20 10 10 0 Configuración C 0 0 50 100 150 200 250 300 350 400 450 500 z (m m ) 0 5 10 15 20 25 30 35 40 45 50 r (m m ) Figura IV.2.2.3. Distribución de errores promedio en función de las coordenadas axial (z) y radial (r) para la configuración de detectores C. Líquido en batch; ug = 0 m/s. Dado que la Configuración B de detectores (8 detectores en hélice) fue la que demostró tener menor error de reconstrucción en toda la columna y más 158 apreciablemente en la región del movimiento axial de la varilla de aluminio adosada al pistón del cilindro, se realizaron con esta configuración calibraciones estáticas (125 para la calibración + 50 intermedias) y en movimiento en distintas condiciones experimentales, de tal modo de analizar condiciones en régimen homogéneo y heterogéneo. Las condiciones estudiadas se detallaron en la Tabla III.3.4.1 de la Parte Experimental. Una vez elegida la configuración de detectores para realizar los experimentos, se evaluó con cuál de los algoritmos de reconstrucción disponibles realizar las reconstrucciones. Las 50 posiciones intermedias estáticas de calibración en condición ug = 0m/s se utilizaron para comparar las reconstrucciones de las mismas utilizando el algoritmo de Monte Carlo adaptado para el oro con el de Cross Correlation utilizado para las comparaciones entre configuraciones de detectores. En la Tabla IV.2.2.2(a) se muestra el error promedio de las 50 posiciones intermedias, mientras que en la Tabla IV.2.2.2(b) se han quitado las posiciones de z = 50mm y z = 450mm. Se observa que el error en z disminuye fuertemente cuando se quitan las posiciones axiales extremas, donde no hay detectores por encima o por debajo, y se pone de manifiesto que este efecto es mucho más fuerte para el algoritmo Cross Correlation que para Monte Carlo. La Figura IV.2.2.4 muestra la distribución de errores de la reconstrucción de las 50 posiciones de calibración intermedias en función de las coordenadas r, z para la configuración B de detectores y para los dos algoritmos de reconstrucción utilizados; mientras que en la Figura IV.2.2.5 se han quitado las posiciones axiales extremas. En las mismas se pone de manifiesto que cuando se quitan las posiciones extremas los errores obtenidos reconstruyendo las posiciones con ambos algoritmos son del mismo orden para las tres coordenadas. La Figura IV.2.2.6 muestra las 50 posiciones estáticas intermedias de calibración reconstruidas en función de las posiciones medidas, mientras que en la Figura IV.2.2.7 se han eliminado las posiciones extremas. Nuevamente, se pone de manifiesto que en la región del movimiento axial ambos algoritmos tienen el mismo orden de error mientras que en las posiciones donde no hay detectores por encima y por debajo de las posiciones medidas, si bien ambos algoritmos aumentan el error, la desviación es mucho más pronunciada para el algoritmo Cross Correlation. 159 Todas las posiciones Algoritmo de reconstrucción Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) Monte Carlo 2.46 1.86 2.48 2.33 1.99 1.81 Cross Correlation 3.84 3.57 2.94 2.56 5.85 9.81 (a) Puntos en la región del movimiento axial Algoritmo de reconstrucción Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) Monte Carlo 2.05 1.41 1.95 1.37 1.46 0.93 Cross Correlation 3.16 1.62 2.34 1.57 2.06 1.31 (b) Tabla IV.2.2.2. Errores calculados para la reconstrucción de las 50 posiciones adicionales tomadas durante la calibración para las 3 configuraciones de detectores estudiadas. (a) Todas las posiciones de calibración. (b) Posiciones de calibración en la región del movimiento axial. 160 20 20 Cross Correlation Cross Correlation Monte Carlo Monte Carlo 15 Error en x (mm) Error en x (mm) 15 10 5 10 5 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 20 z (m m ) 25 30 20 45 50 Cross Correlation Monte Carlo Monte Carlo 15 15 Error en y (mm) Error en y (mm) 40 20 Cross Correlation 10 5 10 5 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 z (m m ) 20 25 30 35 40 45 50 r (m m ) 100 100 Cross Correlation 90 Cross Correlation 90 Monte Carlo 80 Monte Carlo 80 70 Error en z (mm) 70 Error en z (mm) 35 r (m m ) 60 50 40 30 60 50 40 30 20 20 10 10 0 0 0 50 100 150 200 250 300 350 400 450 500 z (m m ) 0 5 10 15 20 25 30 35 40 45 50 r (m m ) Figura IV.2.2.4. Distribución de errores de la reconstrucción de las 50 posiciones de calibración intermedias en función de las coordenadas axial (z) y radial (r) para la configuración de detectores B para los dos algoritmos de reconstrucción utilizados. Líquido en batch; ug = 0m/s. 161 20 20 Cross Correlation Cross Correlation Monte Carlo Monte Carlo 15 Error en x (mm) Error en x (mm) 15 10 5 10 5 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 20 z (m m ) 25 30 45 50 r (m m ) Cross Correlation Cross Correlation Monte Carlo Monte Carlo 15 15 Error en y (mm) Error en y (mm) 40 20 20 10 5 10 5 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 z (m m ) 20 25 30 35 40 45 50 r (m m ) 100 100 Cross Correlation 90 Cross Correlation 90 Monte Carlo 80 Monte Carlo 80 70 Error en z (mm) 70 Error en z (mm) 35 60 50 40 30 60 50 40 30 20 20 10 10 0 0 0 50 100 150 200 250 300 350 400 450 500 z (m m ) 0 5 10 15 20 25 30 35 40 45 50 r (m m ) Figura IV.2.2.5. Distribución de errores en la región del movimiento axial en función de las coordenadas axial (z) y radial (r) para la configuración de detectores B para los dos algoritmos de reconstrucción utilizados. Líquido en batch; ug = 0m/s. 162 50 50 Cross Correlation Cross Correlation Monte Carlo Monte Carlo 25 0 -50 -25 0 25 50 -25 y (mm) - Reconstruido x (mm) - Reconstruido 25 0 -50 -25 0 25 50 -25 -50 -50 x (m m ) - Medido y (m m ) - Medido 500 Cross Correlation z (mm) - Reconstruído Monte Carlo 0 0 500 z (m m ) - Medido Figura IV.2.2.6. Posiciones estáticas de calibración reconstruidas a partir de los promedios de las cuentas para la condición ug = 0m/s en función de las posiciones medidas para la configuración de detectores B para los dos algoritmos de reconstrucción utilizados. 50 50 Cross Correlation Cross Correlation Monte Carlo Monte Carlo 25 0 -50 -25 0 25 50 -25 y (mm) - Reconstruido x (mm) - Reconstruido 25 0 -50 -50 -25 0 25 50 -25 -50 x (m m ) - Medido 500 y (m m ) - Medido Cross Correlation z (mm) - Reconstruído Monte Carlo 0 0 500 z (m m ) - Medido Figura IV.2.2.7. Posiciones estáticas de calibración reconstruidas a partir de los promedios de las cuentas para la condición ug = 0m/s en la región del movimiento axial en función de las posiciones medidas para la configuración de detectores B para los dos algoritmos de reconstrucción utilizados. 163 Una vez analizado el grado de desviación en la reconstrucción obtenido por ambos algoritmos, y dado que en la región del movimiento axial de la varilla del pistón los errores de ambos algoritmos de reconstrucción resultaron comparables, se decidió utilizar el algoritmo Cross Correlation para reconstruir el movimiento de los experimentos descriptos en la sección III.3.4 con la configuración B de detectores para las distintas condiciones de operación de la Tabla III.3.4.1. Esta decisión pone de manifiesto que la elección del algoritmo de reconstrucción también está ligada a las necesidades del problema a resolver. La reconstrucción por el método de Monte Carlo es muy demandante en tiempo operativo debido a que el mismo requiere un ajuste para cada uno de los detectores involucrados y luego la generación del diccionario (ver Apéndice A) es muy demandante computacionalmente. Además, es muy importante tener en cuenta las características geométricas del sistema, tamaño de los detectores, energía de la fuente, etc. En cambio, el algoritmo Cross Correlation es de más fácil y rápida utilización aunque también puede volverse costoso computacionalmente si se reconstruyen demasiados puntos, no siendo este el caso. Dado que en esta oportunidad queremos reproducir un movimiento acotado donde ambos algoritmos proporcionan errores comparables, se utilizó el algoritmo que requiere menos operatoria. En la Figuras IV.2.2.8 a IV.2.2.10 se muestra la distribución de errores para cada coordenada en función de las coordenadas z y r para tres condiciones experimentales representativas estudiadas. La distribución de los errores es del mismo orden para todas las condiciones experimentales, aunque se trate de una condición de líquido estanco o con circulación de gas operando en régimen homogéneo o heterogéneo. En la Tabla IV.2.2.3 se muestran los errores promedio con la correspondiente desviación estándar para las 50 posiciones y luego de haber retirado las posiciones axiales extremas. Nuevamente se observan errores comparables para todas las condiciones exploradas. 164 20 20 ug = 0 m/s ug = 0 m/s 15 Error en x (mm) Error en x (mm) 15 10 5 10 5 0 0 0 0 50 100 150 200 250 300 350 400 450 500 5 10 15 20 25 30 45 50 ug = 0.04 m/s ug = 0.04 m/s 15 15 Error en x (mm) Error en x (mm) 40 20 20 10 10 5 5 0 0 0 0 50 100 150 200 250 300 350 400 450 500 5 10 15 20 25 30 35 40 45 50 r (m m ) z (m m ) 20 20 ug = 0.11 m/s ug = 0.11 m/s 15 Error en x (mm) 15 Error en x (mm) 35 r (m m ) z (m m ) 10 10 5 5 0 0 0 50 100 150 200 250 300 350 400 450 500 z (m m ) 0 5 10 15 20 25 30 35 40 45 50 r (m m ) Figura IV.2.2.8. Distribución de errores de la coordenada x versus las coordenadas axial (z) y radial (r) para experimentos realizados con la Configuración B de detectores para condiciones representativas de operación exploradas (ug = 0m/s, ug = 0.04m/s (régimen homogéneo) y ug = 0.11m/s (régimen heterogéneo)). 165 20 20 ug = 0 m/s ug = 0 m/s 15 Error en y (mm) Error en y (mm) 15 10 10 5 5 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 20 25 30 20 45 50 ug = 0.04 m/s 15 Error en y (mm) 15 Error en y (mm) 40 20 ug = 0.04 m/s 10 10 5 5 0 0 0 0 50 100 150 200 250 300 350 400 450 500 5 10 15 20 25 30 35 40 45 50 r (m m ) z (m m ) 20 20 ug = 0.11 m/s ug = 0.11 m/s 15 Error en y (mm) 15 Error en y (mm) 35 r (m m ) z (m m ) 10 10 5 5 0 0 0 50 100 150 200 250 300 350 400 450 500 z (m m ) 0 5 10 15 20 25 30 35 40 45 50 r (m m ) Figura IV.2.2.9. Distribución de errores de la coordenada y versus las coordenadas axial (z) y radial (r) para experimentos realizados con la Configuración B de detectores para condiciones representativas de operación exploradas (ug = 0m/s, ug = 0.04m/s (régimen homogéneo) y ug = 0.11m/s (régimen heterogéneo)). 166 100 100 90 ug = 0 m/s 80 80 70 70 Error en z (mm) Error en z (mm) 90 60 50 40 30 60 50 40 30 20 20 10 10 0 ug = 0 m/s 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 20 z (m m ) 35 40 45 50 100 90 90 ug = 0.04 m/s 80 80 70 70 Error en z (mm) Error en z (mm) 30 r (m m ) 100 60 50 40 30 ug = 0.04 m/s 60 50 40 30 20 20 10 10 0 0 0 50 100 150 200 250 300 350 400 450 500 0 5 10 15 z (m m ) 20 25 30 35 40 45 50 r (m m ) 100 100 90 90 ug = 0.11 m/s 80 80 70 70 Error en z (mm) Error en z (mm) 25 60 50 40 30 60 50 40 30 20 20 10 10 0 ug = 0.11 m/s 0 0 50 100 150 200 250 300 350 400 450 500 z (m m ) 0 5 10 15 20 25 30 35 40 45 50 r (m m ) Figura IV.2.2.10. Distribución de errores de la coordenada z versus las coordenadas axial (z) y radial (r) para experimentos realizados con la Configuración B de detectores para condiciones representativas de operación exploradas (ug = 0m/s, ug = 0.04m/s (régimen homogéneo) y ug = 0.11m/s (régimen heterogéneo)). 167 Todas las posiciones ug (m/s) Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) 0 3.84 3.57 2.94 2.56 5.85 9.81 0.02 3.58 2.99 3.26 2.68 7.78 11.35 0.04 3.51 3.03 3.06 2.45 7.82 11.02 0.08 3.44 3.03 3.29 2.84 7.29 10.89 0.11 3.62 3.43 3.46 2.92 7.17 10.19 (a) Puntos en la región del movimiento axial ug (m/s) Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) 0 3.16 1.62 2.34 1.57 2.06 1.31 0.02 3.13 1.67 2.47 1.53 1.95 1.34 0.04 3.07 1.69 2.40 1.54 1.94 1.34 0.08 2.84 1.76 2.74 2.04 2.12 1.39 0.11 2.89 2.07 2.95 2.66 2.26 1.92 (b) Tabla IV.2.2.3. Errores calculados para la reconstrucción de las 50 posiciones adicionales tomadas durante la calibración para todas las condiciones experimentales estudiadas. Para comparar las posiciones “instantáneas” determinadas con el algoritmo de reconstrucción con las medidas por el MPLI descripto en la sección III.3.4, previo a los experimentos en movimiento y con la fuente dentro de la varilla de aluminio, se la dejó estática por un tiempo determinado equivalente a 200 mediciones de 30ms. La Figura IV.2.2.11 muestra las determinaciones de la posición instantánea obtenida por el MPLI a 30Hz y la posición instantánea reconstruida a partir de las cuentas de los 8 detectores adquiridas a 33Hz en la Configuración B y empleando el algoritmo Cross Correlation para tres condiciones experimentales típicas: condición sin circulación de gas, régimen homogéneo y régimen heterogéneo. 168 400 350 z (mm) MPLI reconstrucción RPT 300 250 ug = 0m/s 200 150 0 0.5 1 1.5 Tiempo (seg) 2 2.5 3 400 350 z (mm) MPLI 300 reconstrucción RPT 250 ug = 0.02m/s 200 150 0 0.5 1 1.5 Tiempo (seg) 2 2.5 3 400 350 MPLI reconstrucción RPT z (mm) 300 ug = 0.08m/s 250 200 150 0 0.5 1 1.5 Tiempo (seg) 2 2.5 3 Figura IV.2.2.11. Posiciones instantáneas reconstruidas con el algoritmo Cross Correlation comparadas con las proporcionadas por el MPLI para tres condiciones experimentales típicas: ug = 0m/s, ug = 0.02m/s (régimen homogéneo) y ug = 0.08m/s (régimen heterogéneo). 169 La Tabla IV.2.2.4 resume las posiciones promedio calculadas para las posiciones estáticas reconstruidas a partir de las cuentas instantáneas y su correspondiente desviación estándar y las compara con las determinadas mediante el MPLI. MPLI ug (m/s) Reconstrucción Posición promedio (mm) Desviación estándar (mm) Posición promedio (mm) Desviación estándar (mm) 377.10 0.30 373.00 2.90 258.80 0.26 260.40 2.20 177.70 0.25 175.50 2.80 354.90 0.29 355.50 2.94 199.61 0.30 200.28 3.85 177.67 0.26 176.47 3.35 177.91 0.45 176.74 3.41 228.43 0.72 230.98 3.20 377.73 0.51 374.67 3.11 175.70 0.49 175.40 3.86 0 0.02 0.04 0.08 0.11 Tabla IV.2.2.4. Posiciones promedio calculadas a partir de 200 posiciones reconstruidas a partir de las cuentas instantáneas y comparadas con los que se obtuvieron del MPLI. Se observa que la posición axial promedio determinada por ambos métodos difiere como máximo en 3mm cualquiera sea la posición y la condición de operación examinada. La dispersión en la determinación a partir del procedimiento de RPT es siempre un orden de magnitud mayor a la obtenida con las mediciones del MPLI. Luego, se realizaron lo que hemos denominado calibraciones dinámicas con la fuente de 198 Au. Esta vez no se realizaron las filmaciones, sino que las mismas fueron reemplazadas por la medición del sistema resorte – MPLI descripto en la sección III.3.3. Se estudiaron las dos velocidades extremas del cilindro y una intermedia. Las medidas del MPLI se tomaron en simultáneo con la adquisición de las cuentas a la frecuencia más parecida a la de muestreo que se pudo lograr. Las Figuras IV.2.2.12 a IV.2.2.15 muestran 15 segundos de las posiciones reconstruidas con el algoritmo Cross Correlation superpuestas a las posiciones obtenidas en simultáneo del MPLI para todas 170 las condiciones experimentales estudiadas. En las mismas se observa que la superposición de las trayectorias de las posiciones reconstruidas instantáneamente con las medidas con el MPLI es muy buena para las tres velocidades estudiadas y para todas las condiciones de operación, independientemente del régimen de flujo en el que se encuentren. Cabe mencionar que no es posible obtener una cuantificación de la diferencia entre posiciones instantáneas porque las mismas no se miden en forma exactamente simultánea. 171 500 mpli - velocidad mínima 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.02m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 mpli - velocidad media 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.02m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 mpli - velocidad máxima 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.02m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 Figura IV.2.2.12. Posiciones axiales reconstruidas superpuestas con las obtenidas con el MPLI para ug = 0.02 m/s (Régimen de flujo homogéneo). 172 500 mpli - velocidad mínima 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.04m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 mpli - velocidad media 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.04m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 mpli - velocidad máxima 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.04m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 Figura IV.2.2.13. Posiciones axiales reconstruidas superpuestas con las obtenidas con el MPLI para ug = 0.04 m/s (Régimen de flujo homogéneo). 173 500 mpli - velocidad mínima 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.08m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 mpli - velocidad media 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.08m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 mpli - velocidad máxima 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.08m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 Figura IV.2.2.14. Posiciones axiales reconstruidas superpuestas con las obtenidas del MPLI para ug = 0.08m/s (Régimen de flujo heterogéneo). 174 500 mpli - velocidad mínima 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.11m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 mpli - velocidad media 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.11m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 mpli - velocidad máxima 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0.11m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 Figura IV.2.2.15. Posiciones axiales reconstruidas superpuestas con las obtenidas del MPLI para ug = 0.11 m/s (Régimen de flujo heterogéneo). 175 Con el fin de tener mediciones simultáneas de la posición del trazador en movimiento, el sistema de MPLI fue reemplazado por un encoder como fue descripto en la sección III.3.3. El encoder es capaz de registrar tanto posiciones como velocidades instantáneas en simultáneo con la adquisición de las cuentas y a la misma frecuencia de muestreo (33Hz) a través del bloque de módulos CAMAC. Para probarlo se utilizó la Configuración C de detectores (10 detectores). Sólo se realizó calibración estática para la condición ug = 0m/s. En la Figura IV.2.2.16 se muestran 5 segundos de la respuesta del encoder para las tres velocidades estudiadas a ug = 0m/s. La Figura IV.2.2.16 describe el movimiento del pistón del cilindro de aire comprimido. Para las tres velocidades se observa que la velocidad se mantiene regularmente constante durante las subidas y las bajadas y pone en evidencia el efecto de aceleración/desaceleración del pistón debido al accionamiento de las válvulas que producen el cambio en la dirección del movimiento. La Figura IV.2.2.17 muestra 15 segundos de las reconstrucciones realizadas a partir de las cuentas de los 10 detectores en la Configuración C superpuestas con las posiciones obtenidas con el encoder en el mismo momento para las tres velocidades estudiadas para la condición ug = 0m/s. Nuevamente, la superposición de las trayectorias es muy buena. Por último, se calcularon las velocidades instantáneas a partir de posiciones axiales consecutivas medidas con el encoder y/o reconstruidas por RPT, por diferencia directa. En la Figura IV.2.2.18 se superponen las velocidades instantáneas así calculadas con las obtenidas con el encoder para las tres velocidades del pistón estudiadas. Se observa que, para las tres velocidades del pistón, las velocidades instantáneas calculadas por diferenciación sucesiva a partir de las posiciones obtenidas por RPT se encuentran siempre alrededor de la velocidad instantánea proporcionada por el encoder describiendo adecuadamente las variaciones aunque con una fluctuación mayor. Estos resultados ponen de manifiesto que un pequeño error en la determinación de la posición puede llevar a un error significativo en la determinación de la velocidad instantánea. Este efecto podría ser disminuído utilizando algún proceso de filtrado pero debe tenerse en cuenta que se corre el riesgo de filtrar también información fluidodinámica valiosa que generalmente aparece en el mismo rango de frecuencias. 176 0.4 Velocidad instantánea Posición 0.3 Velocidad (m/s) 0.2 0.1 0 0 1 2 3 4 5 -0.1 -0.2 -0.3 ug = 0m/s -0.4 Tiempo (seg) 0.7 Velocidad instantánea Posición 0.5 Velocidad (m/s) 0.3 0.1 -0.1 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 -0.3 -0.5 ug = 0m/s -0.7 Tiempo (seg) 1.5 Velocidad instantánea Posición 1 Velocidad (m/s) 0.5 0 0 1 2 3 4 5 -0.5 -1 ug = 0m/s -1.5 Tiempo (seg) Figura IV.2.2.16. Respuesta del encoder frente al movimiento ascendente y descendente del pistón. Velocidad y posición adquiridas en simultáneo a 33Hz. 177 500 encoder - velocidad mínima 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 encoder - velocidad media 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 encoder - velocidad máxima 450 Reconstrucción 400 z (mm) 350 300 250 200 150 100 ug = 0m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 Figura IV.2.2.17. Posiciones axiales reconstruidas superpuestas a la respuesta simultánea del encoder a 33Hz para las tres velocidades estudiadas. 178 3 2.5 Velocidad encoder Velocidad reconstruída 2 Velocidad (m/s) 1.5 1 0.5 0 -0.5 0 1 2 3 4 5 -1 -1.5 -2 ug = 0m/s -2.5 -3 Tiempo (seg) 3 2.5 Velocidad encoder Velocidad reconstruída 2 Velocidad (m/s) 1.5 1 0.5 0 -0.5 0 1 2 3 4 5 -1 -1.5 -2 ug = 0m/s -2.5 -3 Tiempo (seg) 3 Velocidad encoder 2.5 Velocidad reconstruída 2 Velocidad (m/s) 1.5 1 0.5 0 -0.5 0 1 2 3 4 5 -1 -1.5 -2 ug = 0m/s -2.5 -3 Tiempo (seg) Figura IV.2.2.18. Velocidades instantáneas provistas por el encoder y velocidades calculadas por diferencia a partir de las posiciones reconstruidas. 179 La Figura IV.2.2.19 muestra los errores absolutos en la determinación de la velocidad instantánea durante 5 segundos. Los errores fueron calculados como diferencia absoluta entre las velocidades “instantáneas” calculadas por diferenciación directa a partir de las posiciones medidas con el encoder y de las reconstruidas por RPT. En esta figura se observa que el error fluctúa en forma aleatoria pero que en promedio se mantiene para las tres velocidades del pistón, indicando que es inherente a la técnica y que no aumenta al aumentar la velocidad del movimiento del trazador. 2 Velocidad Máxima Error Velocidad (m/s) Velocidad Media Velocidad Mínima 1.5 ug = 0m/s 1 0.5 0 0 1 2 Tiempo (seg) 3 4 5 Figura IV.2.2.19. Distribución de errores de la velocidad instantánea vs tiempo. La Tabla IV.2.2.5 muestra distintas medidas del error, calculado como diferencias absolutas entre las posiciones y las velocidades instantáneas medidas con el encoder y las reconstruidas por RPT, para las tres velocidades del pistón ensayadas. Para el cómputo del error se utilizaron 2 minutos de ambas series temporales. 180 ug = 0m/s Medidas del Error en posiciones (mm) Velocidad Promedio Desviación Máximo Mínimo Mínima 5.0019 4.1325 33.6672 0.0016 Media 5.7571 4.5285 36.2935 0.0004 Máxima 9.8309 6.8294 51.6105 0.0094 (a) ug = 0m/s Medidas del Error en Velocidades Instantáneas (m/s) Velocidad Promedio Desviación Máximo Mínimo Mínima 0.1991 0.1707 1.3927 0.0000 Media 0.2089 0.1751 1.4512 0.0000 Máxima 0.2543 0.1962 1.1672 0.0002 (b) Tabla IV.2.2.5 Distintas medidas (promedio, desviación,mínimo y máximo) del error calculado como diferencia absoluta entre: (a) posiciones obtenidas en simultáneo con el encoder y reconstruidas por RPT y (b) velocidades instantáneas obtenidas por diferencia por ambos métodos, para las tres velocidades del pistón ensayadas. En la Tabla IV.2.2.5 se observa que el error promedio en la medición de las posiciones aumenta considerablemente a medida que aumenta la velocidad del pistón. Este efecto se debe a que la técnica de RPT recolecta cuentas durante todo el período de muestreo mientras que el encoder determina la posición en un instante dado. En el caso de la velocidad, si bien el encoder provee resultados más regulares, las medidas de error son comparables aunque aumente la velocidad del pistón debido a que el error en la determinación está presente en las dos posiciones involucradas en el cálculo de la velocidad. En consecuencia, el error relativo en la determinación de velocidades “instantáneas” es mayor para velocidades bajas. IV.2.3. EXPERIMENTO DINAMICO DE RPT En las secciones IV.2.1 y IV.2.2 se demostró que el equipo de RPT montado en el CAC fue capaz de reconstruir tanto las posiciones estáticas de calibración a partir de los promedios de las cuentas como las posiciones estáticas y dinámicas a partir de las cuentas instantáneas, empleando fuentes de 46 Sc y 198 Au, con los algoritmos Monte 181 Carlo y Cross Correlation, dentro de los límites esperados de errores de reconstrucción. Además, se estudiaron tres configuraciones distintas de detectores. Luego, con la Configuración C de detectores y utilizando una fuente de 198Au se realizó un experimento preliminar de RPT en la columna de burbujeo que se describe en la sección III.1.1. Para la reconstrucción se utilizó el algoritmo Cross Correlation, siendo éste el único aplicable para esta configuración (ver sección III.3.4), con los mismos parámetros que se habían optimizado para las reconstrucciones de calibración estática y dinámica de la sección IV.2.2. En principio se realizó la calibración estática con las 175 posiciones (125 + 50) que se muestran en la Figura III.3.4.5 de la sección III.3.4. Las 50 posiciones intermedias de calibración que se muestran en rojo en la Figura III.3.4.5 se utilizaron para corroborar que la calidad de la reconstrucción fuera la esperada según los resultados de la sección IV.2.2. La Figura IV.2.3.1 muestra las 50 posiciones estáticas adicionales obtenidas durante el proceso de calibración, reconstruidas a partir de los promedios de las cuentas para las condiciones del experimento en función de las posiciones medidas. Puede observarse que los errores son del orden de los encontrados para la Configuración C para la condición ug = 0m/s cuando se consideraban todas las posiciones de calibración (Tabla IV.2.2.1 (a)). La distribución de errores es comparable con la encontrada para la configuración B en los experimentos en régimen heterogéneo. Luego, el trazador que se muestra en la Figura III.3.1.4 fue liberado en la emulsión bifásica por un tiempo relativamente prolongado. Como este experimento fue preliminar, sólo ilustrativo de parte de la información extraíble de la técnica, se realizó el seguimiento sólo por 2 horas. Para tener una buena estadística en un experimento de RPT, es necesario como mínimo entre 2 y 6 horas de seguimiento, si bien esto depende de la escala de tiempo característica del sistema. La reconstrucción del movimiento de la partícula trazadora dentro de la columna de burbujeo se realizó utilizando las 175 posiciones de calibración. La información más inmediata que se extrae de un experimento de RPT es la variación temporal y espacial de las posiciones y velocidades de la partícula que representa la fase en estudio. A continuación se presentan algunos resultados típicos si 182 bien la estadística en este caso en relativamente pobre dado que el experimento es preliminar y se realizó más con el objetivo de culminar la puesta a punto de la técnica que con propósitos de extraer información dinámica relevante. 50 25 0 -50 -25 0 25 -25 Error Prom = 3.17 DesvEst Error = 2.34 50 Y reconstruidas (mm) X reconstruidas (mm) 50 25 0 -50 -50 X medidas (mm) -25 0 25 50 -25 Error Prom = 3.36 DesvEst Error = 2.76 -50 Y medidas (mm) Z reconstruidas (mm) 500 Error Prom = 6.52 DesvEst Error = 10.92 0 0 Z medidas (mm) 500 Figura IV.2.3.1. Posiciones estáticas de calibración intermedias reconstruidas a partir de los promedios de las cuentas para las condiciones del experimento en función de las posiciones medidas. La Figura IV.2.3.2 ilustra la variación temporal típica (120 segundos) de las coordenadas cartesianas (x, y, z) y la coordenada radial de la partícula trazadora en libre movimiento dentro de la columna de burbujeo en las condiciones del experimento (líquido en batch y ug = 0.08m/s). Se observa dentro de este corto período representativo que la partícula recorre todo el equipo en las tres coordenadas cartesianas. La variación temporal de x e y, y a partir de estas de la posición radial, indica un movimiento frecuente de la partícula entre el centro y la pared de la columna. De todos modos, es claro que es más probable encontrar a la partícula en la región comprendida entre r/R = 0.2 y 0.8. Esto es generalmente debido a que en el centro de la 183 columna hay una mayor proporción de gas contenido en burbujas de gran tamaño que arrastran líquido, y ocasionalmente a la partícula trazadora en los vórtices que estas burbujas forman en su estela. La variación axial está restringida a las posiciones extremas de los detectores debido al método de reconstrucción empleado (Cross Correlation) que limita la zona de movimiento de la partícula a la región que se encuentra entre los detectores. Esto claramente ilustra que para emplear este método de reconstrucción, deben ubicarse los detectores de tal manera que la zona a estudiar quede totalmente comprendida entre los detectores. El método de Monte Carlo permite extrapolar adecuadamente fuera de los límites pero en este caso no es aplicable por lo explicado en la sección III.3.4. En consecuencia, para realizar los experimentos con fines de extraer información fluidodinámica se recomienda utilizar la Configuración B de detectores y reconstruir con Monte Carlo, o reubicar los detectores de tal manera que todas las posiciones de la columna queden comprendidas dentro del arreglo de detectores. Teniendo en cuenta esta limitación, que degrada naturalmente la reconstrucción del movimiento en las zonas próximas a los extremos axiales, se observa de todos modos que la partícula permanece mayoritariamente en la zona inferior de la columna y ocasionalmente asciende en forma aproximadamente continua hacia la zona superior de la emulsión gas – líquido. Estos ascensos han sido generalmente asociados a que la partícula es arrastrada por el paso de burbujas de gran tamaño. La Figura IV.2.3.3 muestra los perfiles radiales de las velocidades radiales y axiales, promediadas en la dirección axial y azimutal. Se observa que las velocidades radiales son bajas dado que el movimiento del trazador se debe fundamentalmente a la recirculación del líquido. En consecuencia, las velocidades axiales son significativamente mayores; positivas cerca del centro donde la partícula es arrastrada por el movimiento ascendente del gas y negativas en la zona próxima a la pared donde el líquido asciende. 184 50 40 30 x(mm) 20 10 0 0 -10 120 -20 -30 -40 -50 tiempo (seg) 50 40 30 y(m m ) 20 10 0 0 -10 120 -20 -30 -40 -50 tiempo (seg) 500 450 400 z(m m ) 350 300 250 200 150 100 50 0 0 120 tiempo (seg) 50 45 40 r(mm) 35 30 25 20 15 10 5 0 0 120 tiempo (seg) Figura IV.2.3.2. Variación temporal (120 segundos) de las coordenadas cartesianas (x, y, z) y de la coordenada radial (r) de la ubicación del trazador dentro de la columna de burbujeo. 185 50 40 30 vr (mm/s) 20 10 0 -10 0 10 20 30 40 50 -20 -30 -40 -50 r (mm) 250 200 vz (mm/s) 150 100 50 0 0 10 20 30 40 50 -50 -100 r (mm) Figura IV.2.3.3. Perfil radial de velocidades radiales y axiales promediadas en la dirección axial y angular. Las Figuras IV.2.3.4 y IV.2.3.5 muestran los campos de velocidades bidimensionales proyectados en el plano (x, y) y en el (r, z). En la Figura IV.2.3.4 se observa nuevamente que las velocidades radiales y tangenciales son muy bajas, producto fundamentalmente de fluctuaciones en la emulsión y turbulencia por los vórtices de las estelas de las burbujas de gran tamaño. En la Figura IV.2.3.5 se comienzan a definir los vórtices característicos del movimiento de recirculación de líquido que se establece en la columna si bien, debido a la baja estadística y a la pobre reconstrucción del método de Cross Correlation en los extremos axiales, se pierde parte de la resolución. 186 Estos resultados ilustran que el sistema montado en el CAC es capaz de proveer información fluidodinámica relevante, y que es importante la selección del método de reconstrucción y de la ubicación de los detectores. 50 40 30 20 10 0 -10 -20 -30 -40 -50 -50 -40 -30 -20 -10 0 10 20 30 40 50 Figura IV.2.3.4. Campo de velocidades bidimensional (vx, vy) promediadas en la dirección axial. 500 450 400 350 300 250 200 150 100 50 0 -60 -40 -20 0 20 40 60 Figura IV.2.3.5. Campo de velocidades bidimensional (vr, vz) promediadas en la dirección angular. 187 IV.2.4. EFECTO DE UTILIZAR UNA SOLA CALIBRACIÓN A la altura de la escritura de esta tesis, la técnica de RPT ha sido extensamente utilizada para caracterizar la fluidodinámica de diversos sistemas multifásicos de aplicación industrial. Sin embargo, todos los estudios realizados se han hecho suponiendo que es necesaria una calibración in situ bajo cada condición experimental. Esta premisa, aceptada como tal, no ha estado en discusión desde que la técnica empezó a desarrollarse a principios de los 90. Dado que el proceso de calibración en un experimento de RPT es especialmente engorroso sobre todo en sistemas grandes o cuando se pretende realizar las reconstrucciones con algún algoritmo como el de reducción de datos explicado en la sección II.4.2, se vuelve limitada la cantidad de experimentos a realizar sobre un sistema en estudio por la cantidad de tiempo involucrada en la etapa de calibración. Asimismo, la aceptación de esta premisa deja automáticamente fuera del alcance de la técnica de RPT el estudio de cualquier fenómeno que produzca un cambio importante en la fluidodinámica del sistema o de procesos transientes. El objetivo de la siguiente sección fue el de desestimar el paradigma instalado sobre la técnica de RPT en cuanto a la necesidad de realizar una calibración cada vez y demostrar que la misma puede ser aplicable al estudio de sistemas que sufran cualquier cambio fluidodinámico. Los resultados que se presentan en esta sección son muy importantes ya que extenderían el uso de la técnica de RPT a usos en los que todavía no se ha explorado ni hay registro en la literatura de la ingeniería química, como por ejemplo el estudio de perturbaciones significativas del flujo que pueden conducir incluso a accidentes. En las secciones IV.2.1 y IV.2.2 se mostraron los experimentos que se realizaron en nuestro equipo de RPT y se demostró la calidad de la reconstrucción conseguida. En esta sección se reprocesaron los datos de los experimentos descriptos en las secciones III.3.2 y III.3.3 para estudiar la calidad de la reconstrucción en los experimentos de calibración estática y dinámica realizados con escandio y oro utilizando calibraciones realizadas en condiciones diferentes a las condiciones de operación de los experimentos. En esta sección evaluaremos la capacidad de la técnica cuando se utiliza una calibración 188 en una condición hidrodinámica diferente para reconstruir experimentos realizados en distintos regímenes de flujo. IV.2.4.1. FUENTE 46SC Dado que las reconstrucciones de la sección IV.2.1 se realizaron utilizando el algoritmo de Monte Carlo, se utilizará el mismo en esta sección. Para detalles sobre el método de reconstrucción consultar el Apéndice A. El método de trabajo consistió en reconstruir las posiciones estáticas de la calibración a partir de los promedios y a partir de las 300 posiciones instantáneas para cada una con el diccionario calculado para el agua (ug = 0m/s) y con el diccionario correspondiente a la condición experimental examinada. Es decir, se compara la reconstrucción de las posiciones obtenidas utilizando una calibración bajo la misma condición experimental con la obtenida utilizando una calibración bajo condiciones sin circulación de gas utilizando el mismo medio (agua). Las Figuras IV.2.4.1.1 a IV.2.4.1.4 muestran las posiciones x, y, z estáticas de calibración reconstruidas a partir de los promedios de las cuentas con el diccionario generado por Monte Carlo para la condición correspondiente y con el diccionario generado para la condición ug = 0m/s para tres condiciones experimentales características: ug = 0.02m/s (régimen homogéneo), ug = 0.06m/s (transición de flujo), ug = 0.12m/s (régimen heterogéneo). En las mismas se observa que, a medida que la condición de calibración (ug = 0m/s) se aleja de las condiciones de flujo, la reconstrucción empieza a ser más deficiente para aquellas posiciones de calibración que se encuentran en posiciones axiales no favorecidas por la configuración de detectores (dos filas de cuatro detectores a 0.1m y 0.4m aproximadamente). Para las posiciones axiales con detectores por encima y por debajo (z = 150mm y z = 350mm) la reconstrucción es adecuada aún en régimen heterogéneo. 189 Medidas Diccionario 0.02m/s Diccionario 0m/s 60 z = 50 mm -40 z = 150 mm 40 20 20 0 -60 60 40 y (mm) y (mm) Medidas Diccionario 0.02m/s Diccionario 0m/s -20 0 20 40 60 0 -60 -40 -20 0 -20 -20 -40 -40 -60 -60 x (m m ) z = 250 mm -40 z = 350 mm 40 20 20 -20 60 60 40 0 -60 40 x (m m ) Medidas Diccionario 0.02m/s Diccionario 0m/s 60 y (mm) y (mm) Medidas Diccionario 0.02m/s Diccionario 0m/s 20 0 20 40 60 0 -60 -40 -20 0 -20 -20 -40 -40 -60 -60 x (m m ) 20 40 60 x (m m ) Medidas Diccionario 0.02m/s Diccionario 0m/s 60 z = 450 mm 40 y (mm) 20 0 -60 -40 -20 0 20 40 60 -20 -40 -60 x (m m ) Figura IV.2.4.1.1. Reconstrucción de las posiciones de calibración a partir de los promedios de las cuentas para la condición de ug = 0.02 m/s (régimen homogéneo) con los diccionarios calculados a partir de las medidas con ug = 0.02 m/s y con ug = 0 m/s. 190 Medidas Diccionario 0.06m/s Diccionario 0m/s 60 z = 50 mm -40 z = 150 mm 40 20 20 0 -60 60 40 -20 0 20 40 60 y (mm) y (mm) Medidas Diccionario 0.06m/s Diccionario 0m/s 0 -60 -40 -20 0 -20 -20 -40 -40 -60 -60 x (m m ) Medidas Diccionario 0.06m/s Diccionario 0m/s 60 z = 250 mm -40 20 20 -20 0 20 40 60 60 z = 350 mm 40 0 -60 40 x (m m ) 60 40 y (mm) y (mm) Medidas Diccionario 0.06m/s Diccionario 0m/s 20 0 -60 -40 -20 0 -20 -20 -40 -40 -60 -60 x (m m ) 20 40 60 x (m m ) Medidas Diccionario 0.06m/s Diccionario 0m/s 60 z = 450 mm 40 y (mm) 20 0 -60 -40 -20 0 20 40 60 -20 -40 -60 x (m m ) Figura IV.2.4.1.2. Reconstrucción de las posiciones de calibración a partir de los promedios de las cuentas para la condición de ug = 0.06 m/s (transición) con los diccionarios calculados a partir de las medidas con ug = 0.06 m/s y con ug = 0 m/s. 191 z = 50 mm 20 20 -20 0 20 40 60 -40 0 -60 -40 -20 0 -20 -20 -40 -40 -60 -60 x (m m ) 60 z = 250 mm 40 20 20 0 20 40 60 40 60 z = 350 mm 40 -20 20 x (m m ) 60 Medidas Diccionario 0.12m/s Diccionario 0m/s 0 -60 z = 150 mm 40 y (mm) -40 60 40 0 -60 Medidas Diccionario 0.12m/s Diccionario 0m/s y (mm) Medidas Diccionario 0.12m/s Diccionario 0m/s 60 y (mm) y (mm) Medidas Diccionario 0.12m/s Diccionario 0m/s 0 -60 -40 -20 0 -20 -20 -40 -40 -60 -60 x (m m ) 20 40 60 x (m m ) Medidas Diccionario 0.12m/s Diccionario 0m/s 60 z = 450 mm 40 y (mm) 20 0 -60 -40 -20 0 20 40 60 -20 -40 -60 x (m m ) Figura IV.2.4.1.3. Reconstrucción de las posiciones de calibración a partir de los promedios de las cuentas para la condición de ug = 0.12 m/s (régimen heterogéneo) con los diccionarios calculados a partir de las medidas con ug = 0.12 m/s y con ug = 0m/s. 192 500 400 400 300 300 z (mm) z (mm) 500 200 200 100 100 0 -60 -40 -20 0 0 y (m m ) 20 40 60 -60 Medidas Diccionario 0.02m/s Diccionario 0m/s -40 -20 0 y (m m ) 20 40 60 Medidas Diccionario 0.06m/s Diccionario 0m/s 500 400 z (mm) 300 200 100 0 -60 -40 -20 0 y (m m ) 20 40 60 Medidas Diccionario 0.12m/s Diccionario 0m/s Figura IV.2.4.1.4. Posiciones axiales medidas vs y reconstruidas con el diccionario para ug = 0 m/s y en las condiciones experimentales correspondientes. En la Tabla IV.2.4.1.1 se muestran los errores promedios calculados como diferencia absoluta entre posiciones medidas y reconstruidas cuando se reconstruyen las 125 posiciones de calibración a partir de las 300 cuentas instantáneas para todas las condiciones experimentales estudiadas utilizando por una lado, el diccionario generado a partir de la calibración en las condiciones de la columna y por otro lado, utilizando el diccionario generado para ug = 0m/s. En la misma se puede observar que en x y en y los errores son comparables reconstruyendo con ambos diccionarios aún para las condiciones en alto régimen heterogéneo. Para la coordenada z en cambio el error comienza a aumentar a medida que se alejan las condiciones de la columna con respecto 193 a la de calibración, acentuándose para la condiciones en régimen heterogéneo. En la Tabla IV.2.4.1.2 se han quitado las posiciones de calibración extremas (z = 50 y 450 cm) para reevaluar el error promedio con su correspondiente desviación estándar en la región del movimiento axial de la partícula en los experimentos de calibración dinámica. En este caso se observa que los errores encontrados para las tres coordenadas al reconstruir con una calibración realizada en una condición estanca son comparables a los encontrados reconstruyendo con una calibración en las mismas condiciones de operación para todas las condiciones experimentales. Esto indica que al emplear datos de una calibración en condiciones de líquido estanco se degrada la reconstrucción en los extremos axiales donde la información es menor y no la de la región interna de la columna; es decir, no es un efecto de una mala evaluación de la atenuación media sino un incremento en la incertidumbre por la falta de información. Es probable que este efecto pudiera disminuir empleando la Configuración B de detectores o aumentando el número de detectores empleados. Todas las posiciones ug (m/s) Diccionario (ug (m/s)) Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) 0.00 0.00 2.24 1.99 2.63 2.70 3.01 5.80 0.02 2.32 2.06 2.68 2.72 2.98 5.13 0.00 2.26 2.01 2.68 2.70 3.32 7.07 0.04 2.46 3.05 2.80 2.84 3.02 4.87 0.00 2.26 2.05 2.61 2.45 4.49 11.16 0.06 2.47 2.26 2.87 2.93 3.01 4.41 0.00 2.28 2.08 2.66 2.51 6.12 15.15 0.08 2.56 2.36 3.01 3.21 3.07 4.50 0.00 2.32 2.12 2.69 2.51 7.90 18.38 0.12 2.68 2.51 3.04 3.11 3.25 5.03 0.00 2.43 2.23 2.78 2.62 11.69 23.73 0.02 0.04 0.06 0.08 0.12 Tabla IV.2.4.1.1. Errores promedio y desviación estándar del error de las posiciones reconstruidas a partir de las 300 cuentas instantáneas de cada una de las 125 posiciones de calibración con ambos diccionarios para cada una de las condiciones experimentales estudiadas (los datos sombreados corresponden a las determinaciones con la calibración medida en la misma condición hidrodinámica). 194 Puntos en la región del movimiento axial ug (m/s) Diccionario (ug (m/s)) Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) 0.00 0.00 2.48 2.20 2.85 2.66 2.62 2.05 0.02 2.56 2.28 2.91 2.73 2.67 2.23 0.00 2.50 2.23 2.90 2.71 2.68 2.17 0.04 2.80 3.70 3.07 2.93 2.77 2.67 0.00 2.57 2.34 2.97 2.81 2.78 2.18 0.06 2.78 2.55 3.18 3.03 2.77 2.23 0.00 2.59 2.36 3.03 2.88 2.81 2.20 0.08 2.86 2.64 3.17 3.04 2.81 2.36 0.00 2.63 2.41 3.00 2.87 2.88 2.25 0.12 3.05 2.87 3.39 3.29 2.97 2.96 0.00 2.74 2.55 3.11 3.02 3.01 2.33 0.02 0.04 0.06 0.08 0.12 Tabla IV.2.4.1.2. Errores promedio y desviación estándar del error de las posiciones reconstruidas a partir de las 300 cuentas instantáneas de cada una de las posiciones de calibración ubicadas en la región axial del movimiento del pistón con ambos diccionarios para cada una de las condiciones experimentales estudiadas (los datos sombreados corresponden a las determinaciones con la calibración medida en la misma condición hidrodinámica). La Tabla IV.2.4.1.3 muestra las velocidades promedio calculadas a partir de las posiciones reconstruidas con el diccionario creado a partir de la calibración en la condición ug = 0m/s para todas las condiciones experimentales estudiadas. Las velocidades fueron calculadas con el método de cuadrados mínimos. La Tabla IV.2.4.1.3 compara las velocidades calculadas con las determinadas mediante el análisis de las filmaciones. Se puede observar que para todas las velocidades impuestas del pistón las velocidades medias calculadas por cuadrados mínimos caen dentro del rango de velocidades medias calculadas para el pistón tanto para los ascensos como para los descensos para condiciones en el régimen homogéneo y heterogéneo. Las Figuras IV.2.4.1.5 y IV.2.4.1.6 muestran las distribuciones de velocidades obtenidas para las condiciones de operación extremas: ug = 0.02m/s (condición más baja estudiada en régimen homogéneo) y ug = 0.12m/s (condición más alta estudiada en régimen heterogéneo) reconstruidas con el diccionario generado para la condición ug = 0m/s. En las figuras puede observarse cómo la distribución de velocidades se encuentra dentro de los rangos esperados hasta para la condición más extrema estudiada en régimen heterogéneo donde existen las mayores diferencias hidrodinámicas entre la 195 condición de flujo de la medición del movimiento del pistón y la calibración (ug = 0m/s) y donde también existe la mayor diferencia en la atenuación de la fuente por el medio multifásico. Velocidad superficial de gas (m/s) N1 Velocidad media reconstruida (m/s) 0 0.174 +/- 0.005 0.149 +/- 0.002 0.147 +/- 0.003 0.02 0.174 +/- 0.011 0.177+/- 0.004 0.149 +/- 0.002 0.146 +/- 0.002 0.04 0.174 +/- 0.011 0.178 +/- 0.005 0.149 +/- 0.002 0.147 +/- 0.002 0.06 0.174 +/- 0.011 0.178 +/- 0.006 0.149 +/- 0.002 0.148 +/- 0.002 0.08 0.174 +/- 0.011 0.179 +/- 0.004 0.149 +/- 0.002 0.150 +/- 0.003 0.12 0.174 +/- 0.011 0.178 +/- 0.004 0.149 +/- 0.002 0.152 +/- 0.003 Velocidad media impuesta (m/s) Velocidad media reconstruida (m/s) Movimiento Descendente 0 0.309 +/- 0.022 0.297 +/- 0.012 0.297 +/- 0.006 0.02 0.309 +/- 0.022 0.302 +/- 0.007 0.297 +/- 0.012 0.291 +/- 0.007 0.04 0.309 +/- 0.022 0.308 +/- 0.008 0.297 +/- 0.012 0.301 +/- 0.007 0.06 0.309 +/- 0.022 0.314 +/- 0.008 0.297 +/- 0.012 0.303 +/- 0.007 0.08 0.309 +/- 0.022 0.317 +/- 0.008 0.297 +/- 0.012 0.306 +/- 0.008 0.12 0.309 +/- 0.022 0.319 +/- 0.009 0.297 +/- 0.012 0.308 +/- 0.008 Movimiento Ascendente Velocidad media impuesta (m/s) Velocidad media reconstruida (m/s) Movimiento Descendente 0 0.627 +/- 0.067 Velocidad media reconstruida 0.602 +/- 0.019 0.653 +/- 0.050 0.668 +/- 0.023 0.02 0.627 +/- 0.067 0.603 +/- 0.021 0.653 +/- 0.050 0.659 +/- 0.037 0.04 0.627 +/- 0.067 0.611 +/- 0.023 0.653 +/- 0.050 0.656 +/- 0.028 0.06 0.627 +/- 0.067 0.619 +/- 0.023 0.653 +/- 0.050 0.643 +/- 0.027 0.08 0.627 +/- 0.067 0.622 +/- 0.024 0.653 +/- 0.050 0.640 +/- 0.025 0.12 0.627 +/- 0.067 0.623 +/- 0.026 0.653 +/- 0.050 0.653 +/- 0.034 Velocidad superficial de gas (m/s) N4 Movimiento Ascendente Velocidad media impuesta (m/s) Velocidad media reconstruida 0.304 +/- 0.007 Velocidad superficial de gas (m/s) N3 Movimiento Descendente Velocidad media impuesta (m/s) 0.174 +/- 0.011 Velocidad superficial de gas (m/s) N2 Movimiento Ascendente Velocidad media impuesta (m/s) Movimiento Ascendente Velocidad media impuesta (m/s) Velocidad media impuesta (m/s) Velocidad media reconstruida (m/s) Movimiento Descendente 0 0.963 +/- 0.113 Velocidad media reconstruida 0.962 +/- 0.050 1.12 +/- 0.133 1.131 +/- 0.066 0.02 0.963 +/- 0.113 0.954 +/- 0.047 1.12 +/- 0.133 1.123 +/- 0.065 0.04 0.963 +/- 0.113 0.929 +/- 0.048 1.12 +/- 0.133 1.097 +/- 0.069 0.06 0.963 +/- 0.113 0.947 +/- 0.046 1.12 +/- 0.133 1.118 +/- 0.062 0.08 0.963 +/- 0.113 0.899 +/- 0.046 1.12 +/- 0.133 1.073 +/- 0.068 0.12 0.963 +/- 0.113 0.944 +/- 0.055 1.12 +/- 0.133 1.168 +/- 0.085 Velocidad media impuesta (m/s) Velocidad media reconstruida (m/s) Tabla IV.2.4.1.3. Velocidades promedio calculadas a partir de las posiciones Esta tabla tiene las velocidades de todas las condiciones reconstruidas con el diccionario del agua 196 N2 / LS N1/ LS 0.8 0.7 0.5 0.5 Frecuencia Frecuencia 0.6 ug = 0.02 m/s 0.4 0.3 ug = 0.02 m/s 0.4 0.3 0.2 0.2 0.1 0.1 0 -0.4 -0.2 0 0.2 Velocidad (m/s) 0.4 0 -1 0.6 -0.5 N3 / LS 0 Velocidad (m/s) 0.5 1 N4 / LS 0.25 0.5 ug = 0.02 m/s 0.2 0.4 Frecuencia ug = 0.02 m/s Frecuencia 0.15 0.1 0.05 0 -1.5 0.3 0.2 0.1 -1 -0.5 0 0.5 Velocidad (m/s) 1 1.5 0 -3 -2 -1 0 1 Velocidad (m/s) 2 3 Figura IV.2.4.1.5. Distribuciones de velocidades obtenidas por ajuste de cuadrados mínimos (LS) a partir de las posiciones reconstruidas con el diccionario creado para la condición ug = 0m/s para las cuatro velocidades del pistón estudiadas para una condición en el régimen homogéneo (ug = 0.02m/s). 197 N2 / LS N1 / LS 1 0.5 0.8 0.4 Frecuencia Frecuencia ug = 0.12 m/s 0.6 0.4 0.2 0 ug = 0.12 m/s 0.3 0.2 0.1 -0.4 -0.2 0 0.2 Velocidad (m/s) 0.4 0 -1 0.6 -0.5 N3 / LS 0 Velocidad (m/s) 0.5 1 N4 / LS 0.2 0.4 0.35 ug = 0.12 m/s 0.3 ug = 0.12 m/s 0.1 0.05 Frecuencia Frecuencia 0.15 0.25 0.2 0.15 0.1 0.05 0 -1.5 -1 -0.5 0 0.5 Velocidad Velocity(m/s) (m/s) (m/s) Velocidad 1 1.5 0 -3 -2 -1 0 1 Velocidad (m/s) 2 3 Figura IV.2.4.1.6. Distribuciones de velocidades obtenidas por ajuste de cuadrados mínimos (LS) a partir de las posiciones reconstruidas con el diccionario creado para la condición ug = 0m/s para las cuatro velocidades del pistón estudiadas para la condición en el régimen heterogéneo mas extrema estudiada (ug = 0.12m/s). IV.2.4.2. FUENTE 198AU En esta sección se estudia la factibilidad de prescindir de la calibración realizada en idénticas condiciones que el experimento para reconstruir la trayectoria de la partícula trazadora. Para este fin se determinaron los errores que se cometen al emplear una calibración realizada en condiciones estáticas (columna llena de agua ug = 0m/s) para reconstruir todas las condiciones experimentales estudiadas. Las medidas se realizaron con la Configuración B (8 detectores en hélice). Las reconstrucciones en esta sección se realizaron con el mismo algoritmo utilizado para los resultados de la sección IV.2.2., Cross Correlation. Para detalles sobre el método de reconstrucción consultar el Apéndice A. 198 La Tabla IV.2.4.2.1 muestra el valor medio de los errores calculados como diferencia absoluta para las posiciones estáticas intermedias tomadas durante la calibración, para todas las condiciones experimentales estudiadas expuestas en la Tabla III.3.3.1 de la sección III.3.3 para los experimentos con la fuente de 198 Au. La Tabla IV.2.4.2.1 también compara los errores calculados para la reconstrucción de las posiciones utilizando las cuentas de calibración para la condición experimental correspondiente y utilizando las cuentas de calibración adquiridas para la condición ug = 0m/s. La Tabla IV.2.4.2.1(a) muestra el error promedio de las 50 posiciones y la Tabla IV.2.4.2.1(b) muestra el error promedio considerando solamente las posiciones en la región del movimiento de la partícula trazadora durante el experimento de calibración dinámica. Se observa que a medida que la velocidad superficial de gas aumenta, el error se incrementa levemente cuando se utiliza una calibración en condiciones de ug = 0m/s. Cuando se quitan los puntos de calibración en las posiciones axiales extremas, donde el algoritmo Cross Correlation demostró degradar la calidad de la reconstrucción en la sección IV.2.2, el error en la posición axial disminuye significativamente y la reconstrucción usando datos de calibración con ug = 0 m/s o en las condiciones correspondientes se vuelve comparable para las tres coordenadas y para todas las condiciones experimentales estudiadas. Este efecto se muestra para la coordenada z en la Figura IV.2.4.2.1 para todas las condiciones experimentales estudiadas. Teniendo en cuenta estos resultados y los ilustrados en la sección anterior para la fuente de 46Sc, se infiere nuevamente que el empleo de una calibración en condiciones no correspondientes a la del experimento incrementa fundamentalmente los errores en la zona donde la técnica tiene más incertidumbre ya sea por el número o la disposición de los detectores o por el algoritmo de reconstrucción empleado. 199 Todas las posiciones Condición ug (m/s) 0.02 0.04 0.08 0.11 Calibración ug (m/s) Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) 0.02 3.58 2.99 3.26 2.68 7.78 11.35 0 3.69 3.38 3.19 2.58 8.83 12.95 0.04 3.51 3.03 3.06 2.45 7.82 11.02 0 3.89 3.38 3.53 2.68 7.52 12.02 0.08 3.44 3.03 3.29 2.84 7.29 10.89 0 4.12 3.64 4.03 3.19 9.24 14.57 0.12 3.62 3.43 3.46 2.92 7.17 10.19 0 4.41 3.69 4.12 3.03 8.51 13.81 (a) Región del movimiento axial Condición ug (m/s) 0.02 0.04 0.08 0.11 Calibración ug (m/s) Error promedio en x (mm) Desviación en el error en x (mm) Error promedio en y (mm) Desviación en el error en y (mm) Error promedio en z (mm) Desviación en el error en z (mm) 0.02 3.13 1.67 2.47 1.53 1.95 1.34 0 3.11 1.67 2.40 1.55 2.02 1.29 0.04 3.07 1.69 2.40 1.54 1.94 1.34 0 3.19 1.61 3.03 2.08 1.94 1.62 0.08 2.84 1.76 2.74 2.04 2.12 1.39 0 3.76 2.31 3.21 2.08 1.91 1.68 0.12 2.89 2.07 2.95 2.66 2.26 1.92 0 3.91 2.47 3.42 2.14 1.81 1.41 (b) Tabla IV.2.4.2.1. Errores promedio y desviación estándar calculados para la reconstrucción de las posiciones intermedias estáticas tomadas durante la calibración y reconstruidas con las cuentas adquiridas en la condición experimental correspondiente y con las cuentas adquiridas bajo la condición estática ug = 0m/s. (a) Todas las posiciones. (b) Posiciones en la región del movimiento del pistón del cilindro (los datos sombreados corresponden a las determinaciones con la calibración medida en la misma condición hidrodinámica). 200 500 500 Calibración ug = 0.04m/s Calibración ug = 0.02m/s Calibración ug = 0m/s Calibración ug = 0m/s 400 z (mm) - Reconstruído z (mm) - Reconstruído 400 300 200 100 300 200 100 ug = 0.02 m/s ug = 0.04 m/s 0 0 0 100 200 300 400 500 0 100 z (m m ) - Medido 300 400 500 z (m m ) - Medido 500 500 Calibración ug = 0.08m/s Calibración ug = 0.11m/s Calibración ug = 0m/s Calibración ug = 0m/s 400 z (mm) - Reconstruído 400 z (mm) - Reconstruído 200 300 200 100 300 200 100 ug = 0.08 m/s ug = 0.11 m/s 0 0 0 100 200 300 400 z (m m ) - Medido 500 0 100 200 300 400 500 z (m m ) - Medido Figura IV.2.4.2.1. Coordenada axial medida y reconstruida con la calibración correspondiente y con la calibración de ug = 0m/s para todas las condiciones experimentales estudiadas. El análisis presentado hasta aquí es el más extremo que se puede hacer para un sistema gas – líquido dado que se están reconstruyendo posiciones en condiciones de régimen homogéneo y heterogéneo con una calibración donde la atenuación del medio es constante porque no hay circulación de gas; es decir, el sistema durante la calibración es monofásico y con el líquido estanco. Es natural que las condiciones más afectadas sean las de régimen heterogéneo dado que la variación de hold up, y en consecuencia de la atenuación media de la emulsión gas – líquido, es considerable (ver los resultados de la sección de Densitometría). Aún en este contexto, los errores siguen estando dentro de los límites admisibles y surgen fundamentalmente de la disposición del arreglo y el número de 201 detectores y del algoritmo de reconstrucción empleado. Por otra parte, el error de reconstrucción para una condición extrema en régimen heterogéneo, puede disminuirse si se utiliza una calibración realizada en otra condición pero dentro del mismo régimen heterogéneo. Este efecto es ilustrado en la Figura IV.2.4.2.2 para la coordenada z en (a) y para las coordenadas x e y en (b). 500 Calibración ug = 0.11m/s Calibración ug = 0m/s z (mm) - Reconstruído 400 Calibración ug = 0.08m/s 300 200 100 ug = 0.11 m/s 0 0 100 200 300 400 500 z (mm) - Medido (a) Figura IV.2.4.2.2. Efecto de utilizar distintas calibraciones en la reconstrucción de las posiciones intermedias para la condición en régimen heterogéneo a ug = 0.11m/s. (a) Coordenada z. (b) Coordenadas x e y. 202 Calibración 0.11m/s Calibración 0m/s Calibración 0.08 m/s Medidas Calibración 0.11m/s Calibración 0m/s Calibración 0.08 m/s Medidas 60 z = 50 mm 40 60 z = 150 mm 40 20 0 -60 -40 -20 0 20 40 60 y (mm) y (mm) 20 0 -60 -40 -20 0 -20 -20 -40 -40 -60 -60 x (m m ) z = 250 mm -40 z = 350 mm 40 20 20 -20 0 60 60 40 0 -60 40 x (m m ) Calibración 0.11m/s Calibración 0m/s Calibración 0.08 m/s Medidas 60 20 40 60 y (mm) y (mm) Calibración 0.11m/s Calibración 0m/s Calibración 0.08 m/s Medidas 20 0 -60 -40 -20 0 -20 -20 -40 -40 -60 -60 20 40 60 x (m m ) x (m m ) Calibración 0.11m/s Calibración 0m/s Calibración 0.08 m/s Medidas 60 z = 450 mm 40 y (mm) 20 0 -60 -40 -20 0 20 40 60 -20 -40 -60 x (m m ) (b) Figura IV.2.4.2.2. Efecto de utilizar distintas calibraciones en la reconstrucción de las posiciones intermedias para la condición en régimen heterogéneo a ug = 0.11m/s. (a) Coordenada z. (b) Coordenadas x e y. 203 Efecto de la incidencia de una sola calibración utilizando el sistema resorte – MPLI, con la Configuración B de detectores. Las Figuras IV.2.4.2.3 y IV.2.4.2.4 muestran las reconstrucciones del movimiento del pistón a las tres velocidades estudiadas para dos condiciones experimentales representativas del régimen homogéneo y heterogéneo. En ambas se ha superpuesto la posición obtenida a partir de las mediciones del MPLI, la posición obtenida a partir de la reconstrucción instantánea con la respectiva calibración, y la posición obtenida a partir de la reconstrucción con la calibración de ug = 0m/s, se observa que la coincidencia de las trayectorias es excelente. Las figuras ponen de manifiesto que para un sistema bifásico agua – aire, la técnica de RPT es capaz de reproducir el movimiento de un trazador aún cuando las mediciones de calibración se hayan realizado bajo condiciones muy diferentes que las inherentes a la condición de flujo que se pretende estudiar. Nuevamente se aclara que en este caso no es factible realizar una cuantificación de los errores de las posiciones instantáneas tomando las del MPLI como referencia porque las mediciones no son exactamente simultáneas. 204 500 mpli - velocidad máxima 450 Reconstrucción Reconstrucción cal ug = 0m/s 400 z (mm) 350 300 250 200 150 100 ug = 0.04m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 450 mpli - velocidad media Reconstrucción Reconstrucción cal ug = 0m/s 400 z (mm) 350 300 250 200 150 100 ug = 0.04m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 450 mpli - velocidad mínima Reconstrucción Reconstrución cal ug = 0m/s 400 z (mm) 350 300 250 200 150 100 ug = 0.04m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 Figura IV.2.4.2.3. Trayectorias del movimiento del pistón para las tres velocidades del pistón estudiadas para la condición ug = 0.04m/s, obtenidas por dos métodos independientes: los puntos azules representan las posiciones obtenidas a partir de las medidas del MPLI; los puntos rosados y verdes representan las posiciones obtenidas a partir de la reconstrucción instantánea con el algoritmo Cross Correlation utilizando la calibración correspondiente a la condición ug = 0.04m/s y ug = 0m/s respectivamente. 205 500 mpli - velocidad máxima 450 Reconstrucción Reconstrucción cal ug = 0m/s 400 z (mm) 350 300 250 200 150 100 ug = 0.11m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 mpli - velocidad media 450 Reconstrucción Reconstrucción cal ug = 0m/s 400 z (mm) 350 300 250 200 150 100 ug = 0.11m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 500 mpli - velocidad mínima 450 Reconstrucción Reconstrucción cal ug = 0m/s 400 z (mm) 350 300 250 200 150 100 ug = 0.11m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 Figura IV.2.4.2.4. Trayectorias del movimiento del pistón para las tres velocidades del pistón estudiadas para la condición ug = 0.11m/s, obtenidas por dos métodos independientes: los puntos azules representan las posiciones obtenidas a partir de las medidas del MPLI; los puntos rosados y verdes representan las posiciones obtenidas a partir de la reconstrucción instantánea con el algoritmo Cross Correlation utilizando la calibración correspondiente a la condición ug = 0.11m/s y ug = 0m/s respectivamente. 206 Efecto de la incidencia de una sola calibración con el encoder y con la Configuración C (10 detectores) Con el fin de tener una cuantificación de los errores en las posiciones y velocidades instantáneas, se reconstruyen nuevamente las posiciones de los experimentos de calibración dinámica en los que se midió simultáneamente con un encoder. Las Figuras IV.2.4.2.5 a IV.2.4.2.10 exponen los resultados obtenidos con la Configuración C (10 detectores) superpuesta con la respuesta del encoder para las tres velocidades del pistón estudiadas en condiciones experimentales representativas de los regímenes homogéneo y heterogéneo y con las tres velociadades impuestas del pistón. La calibración utilizada para la reconstrucción es la de la condición ug = 0m/s en todos los casos. Para todas las velocidades del pistón estudiadas y para todas las condiciones de operación se encuentran resultados comparables a las Figuras IV.2.2.17 y IV.2.2.18 poniendo de manifiesto que la técnica no sólo es capaz de reproducir las posiciones reconstruidas a partir de una calibración medida en condiciones estancas sino que también proporciona las velocidades instantáneas con el mismo orden de desviación que para la condición reconstruida con la calibración correspondiente. La Figura IV.2.4.2.11 (a) muestra diferentes medidas de los errores, calculados como diferencia absoluta entre las posiciones axiales medidas con el encoder y las reconstruidas con RPT, para todas las condiciones experimentales enumeradas en la Tabla III.3.4.2 y utilizando la calibración con ug = 0m/s. Asimismo, la Figura IV.2.4.2.11 (b) muestra medidas de los errores absolutos determinados como diferencia entre las velocidades “instantáneas” calculadas por diferenciación directa a partir de dichas posiciones, para la menor velocidad del pistón ensayada. Se observa que todas las medidas del error de las posiciones y velocidades reconstruidas empleando la calibración medida en condiciones de ug = 0m/s son comparables a la obtenida para la condición de ug = 0m/s, aunque la condición experimental se encuentre en régimen homogéneo o heterogéneo. Esto indica que el error inherente del método no se amplifica por utilizar una calibración realizada en condiciones de líquido estanco para determinar la trayectoria del trazador en condiciones medidas con circulación de gas. Cabe aclarar 207 que se encontraron tendencias similares para las otras dos velocidades del pistón estudiadas en las cuales el error relativo en la medición de velocidad es menor. 500 encoder - velocidad máxima 450 Reconstrucción cal ug = 0m/s 400 z (mm) 350 300 250 200 150 (a) 100 ug = 0.04m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 3 2.5 Velocidad encoder Velocidad reconstruída 2 Velocidad (m/s) 1.5 1 0.5 0 -0.5 0 1 2 3 4 5 -1 -1.5 -2 -2.5 ug = 0.04m/s (b) -3 Tiempo (seg) Figura IV.2.4.2.5. (a) Trayectorias del movimiento del pistón para la máxima velocidad del mismo estudiada para la condición ug = 0.04m/s en régimen homogéneo. Los puntos azules representan las posiciones adquiridas por el encoder, los puntos verdes representan las posiciones instantáneas reconstruidas con la calibración estática ug = 0m/s. (b) Velocidades instantáneas; los puntos azules representan las velocidades instantáneas adquiridas por el encoder, los puntos verdes representan las velocidades instantáneas calculadas por diferencia a partir de las posiciones que se muestran en (a). 208 500 encoder - velocidad máxima 450 Reconstrucción cal ug = 0m/s 400 z (mm) 350 300 250 200 150 (a) 100 ug = 0.10m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 3 2.5 Velocidad encoder Velocidad reconstruída 2 Velocidad (m/s) 1.5 1 0.5 0 -0.5 0 1 2 3 4 5 -1 -1.5 -2 -2.5 ug = 0.10m/s (b) -3 Tiempo (seg) Figura IV.2.4.2.6. (a) Trayectorias del movimiento del pistón para la máxima velocidad del mismo estudiada para la condición ug = 0.10m/s en régimen heterogéneo. Los puntos azules representan las posiciones adquiridas por el encoder, los puntos verdes representan las posiciones instantáneas reconstruidas con la calibración estática ug = 0m/s. (b) Velocidades instantáneas; los puntos azules representan las velocidades instantáneas adquiridas por el encoder, los puntos verdes representan las velocidades instantáneas calculadas por diferencia a partir de las posiciones que se muestran en (a). 209 500 encoder - velocidad media 450 Reconstrucción cal ug = 0m/s 400 z (mm) 350 300 250 200 150 100 (b) (a) 50 ug = 0.04m/s 0 0 2 4 6 8 Tiempo (seg) 10 12 14 3 2.5 Velocidad encoder Velocidad reconstruída 2 Velocidad (m/s) 1.5 1 0.5 0 -0.5 0 1 2 3 4 5 -1 -1.5 -2 (b) ug = 0.04m/s -2.5 -3 Tiempo (seg) Figura IV.2.4.2.7. (a) Trayectorias del movimiento del pistón para una velocidad media del mismo estudiada para la condición ug = 0.04m/s en régimen homogéneo. Los puntos azules representan las posiciones adquiridas por el encoder, los puntos verdes representan las posiciones instantáneas reconstruidas con la calibración estática ug = 0m/s. (b) Velocidades instantáneas; los puntos azules representan las velocidades instantáneas adquiridas por el encoder, los puntos verdes representan las velocidades instantáneas calculadas por diferencia a partir de las posiciones que se muestran en (a). 210 500 encoder - velocidad media 450 Reconstrucción cal ug = 0m/s 400 z (mm) 350 300 250 200 150 100 (a) ug = 0.10m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 3 2.5 Velocidad encoder Velocidad reconstruída 2 Velocidad (m/s) 1.5 1 0.5 0 -0.5 0 1 2 3 4 5 -1 -1.5 -2 (b) (b) (b) (a) ug = 0.10m/s -2.5 -3 Tiempo (seg) Figura IV.2.4.2.8. (a) Trayectorias del movimiento del pistón para una velocidad media del mismo estudiada para la condición ug = 0.10m/s en régimen heterogéneo. Los puntos azules representan las posiciones adquiridas por el encoder, los puntos verdes representan las posiciones instantáneas reconstruidas con la calibración estática ug = 0m/s. (b) Velocidades instantáneas; los puntos azules representan las velocidades instantáneas adquiridas por el encoder, los puntos verdes representan las velocidades instantáneas calculadas por diferencia a partir de las posiciones que se muestran en (a). 211 500 encoder - velocidad mínima 450 Reconstrucción cal ug = 0m/s 400 z (mm) 350 300 250 200 150 (a) 100 ug = 0.04m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 3 2.5 Velocidad encoder Velocidad reconstruída 2 Velocidad (m/s) 1.5 1 0.5 0 -0.5 0 1 2 3 4 5 -1 -1.5 -2 (b) ug = 0.04m/s -2.5 -3 Tiempo (seg) Figura IV.2.4.2.9. (a) Trayectorias del movimiento del pistón para la mínima velocidad del mismo estudiada para la condición ug = 0.04m/s en régimen homogéneo. Los puntos azules representan las posiciones adquiridas por el encoder, los puntos verdes representan las posiciones instantáneas reconstruidas con la calibración estática ug = 0m/s. (b) Velocidades instantáneas; los puntos azules representan las velocidades instantáneas adquiridas por el encoder, los puntos verdes representan las velocidades instantáneas calculadas por diferencia a partir de las posiciones que se muestran en (a). 212 500 encoder - velocidad mínima 450 Reconstrucción cal ug = 0m/s 400 z (mm) 350 300 250 200 150 (a) 100 ug = 0.10m/s 50 0 0 2 4 6 8 Tiempo (seg) 10 12 14 3 2.5 Velocidad encoder Velocidad reconstruída 2 Velocidad (m/s) 1.5 1 0.5 0 -0.5 0 1 2 3 4 5 -1 -1.5 -2 (b) ug = 0.10m/s -2.5 -3 Tiempo (seg) Figura IV.2.4.2.10. (a) Trayectorias del movimiento del pistón para la mínima velocidad del mismo estudiada para la condición ug = 0.10m/s en régimen heterogéneo. Los puntos azules representan las posiciones adquiridas por el encoder, los puntos verdes representan las posiciones instantáneas reconstruidas con la calibración estática ug = 0m/s. (b) Velocidades instantáneas; los puntos azules representan las velocidades instantáneas adquiridas por el encoder, los puntos verdes representan las velocidades instantáneas calculadas por diferencia a partir de las posiciones que se muestran en (a). 213 45 Medidas de Error en Posiciones (mm) ug = 0m/s 40 ug = 0.02m/s 35 ug = 0.04m/s 30 ug = 0.08m/s 25 ug = 0.10m/s 20 15 10 5 0 Promedio Desviación Max. Min. (a) 1.8 Medidas de Error en Velocidades Instantáneas (m/s) ug = 0m/s 1.6 ug = 0.02m/s 1.4 ug = 0.04m/s 1.2 ug = 0.08m/s 1 ug = 0.10m/s 0.8 0.6 0.4 0.2 0 Promedio Desviación Max. Min. (b) Figura IV.2.4.2.11. Medidas del error calculado como diferencia absoluta de (a) las posiciones del trazador determinadas con el encoder y reconstruidas por RPT y (b) las velocidades “instantáneas” calculadas por diferenciación directa de las posiciones medidas con el encoder y reconstruidas por RPT. Mínima velocidad del pistón estudiada para todas las condiciones experimentales. 214 IV.3. DINÁMICA SIMBÓLICA IV.3.1. APLICACIÓN DE DINÁMICA SIMBÓLICA A SERIES TEMPORALES DE UNA COORDENADA DE RPT La metodología de análisis de series temporales explicada en la sección II.3.1 fue aplicada a las series temporales de la coordenada axial del movimiento de un sólido en un lecho fluidizado trifásico obtenida mediante experimentos de RPT. Los experimentos analizados con esta metodología se describieron en la sección III.4. Los datos utilizados son los obtenidos con el Equipo A de RPT al que se hace referencia en dicha sección experimental. Las condiciones experimentales se detallaron en la Tabla III.4.1. Para generar las series de secuencias de símbolos, las series temporales de las posiciones axiales del trazador fueron convertidas en series de símbolos de acuerdo con la localización del trazador en el lecho fluidizado. El lecho fue dividido axialmente en cuatro regiones. Sucesivamente, se inspeccionaron grupos de cuatro posiciones axiales del trazador, separados 0.12s cada una. A la región del lecho que contiene la partícula se le asigna el número 1, mientras que a las demás se les asigna un 0. Por lo tanto, se definieron 24 secuencias de símbolos (0000, 0001, 0010, 0011, 0100, 0101, 0110, 0111, 1000, 1001, 1010, 1011, 1100, 1101, 1110, 1111). La frecuencia 0000 está prohibida dado que la partícula se encuentra en todo momento en alguna región del lecho fluidizado. La Figura IV.3.1 muestra esquemáticamente dos ejemplos de las secuencias de símbolos definidas para el análisis. La frecuencia relativa de cada secuencia depende de la intensidad del movimiento axial del trazador. 215 (0011) (1111) Figura IV.3.1. Esquematización de las secuencias 0011 y 1111 dentro del lecho fluidizado compartimentado. La Figura IV.3.2 muestra los histogramas de las secuencias de ocurrencias de símbolos para los experimentos realizados en el Equipo A de RPT a las diferentes velocidades de gas detalladas en la Tabla III.4.1, además de una condición con ug = 0m/s. Los índices de los símbolos utilizados en la figura son las representaciones decimales de los números binarios dados por las secuencias de símbolos. La Figura IV.3.2 pone de manifiesto algunas características evidentes, como la marcada prominencia de la secuencia de símbolo 1000 (índice 8) en el experimento en el lecho fluidizado líquido – sólido segregado (Figura IV.3.2 (a)). En la misma figura, sólo se observan dos secuencias de símbolos además de la 8: 0100 (índice 4), el cuál corresponde a la partícula en la región inmediatamente por debajo de la cual se encuentra la mayor parte del tiempo, y 1100 (índice 12), una combinación de las otras dos. Cuando el sistema se torna trifásico (gas – líquido – sólido) por circulación de gas a través del lecho fluidizado sólido – líquido (Figura IV.3.2 (b)), la situación se modifica completamente. La frecuencia del símbolo de índice 8 decrece progresivamente a medida que se incrementa la velocidad de gas, siendo prácticamente despreciable para la mayor velocidad de gas (Figuras IV.3.2 (d)). 216 pi 1 pi 1 (a) (b) 0,8 0,8 0,6 0,6 0,4 0,4 0,2 0,2 0 0 0 2 4 6 8 10 12 14 0 2 symbol index Indice de símbolo p i1 4 6 8 10 12 14 Indice de símbolo symbol index (c) p i1 (d) 0,8 0,8 0,6 0,6 0,4 0,4 0,2 0,2 0 0 0 2 4 6 8 10 12 14 symbol index Indice de símbolo 0 2 4 6 8 10 12 14 symbol index Indice de símbolo Figura IV.3.2. Simbolización estática: histogramas de las secuencias de símbolos determinadas a partir de los desplazamientos axiales del trazador en el lecho fluidizado trifásico durante experimentos de 6 horas con GB 3mm a diferentes velocidades: (a) ug = 0m/s; (b) ug = 0.032m/s; (c) ug = 0.069m/s; (d) ug = 0.110m/s. uL = 0.032m/s; masa de sólidos = 0.4 kg. Comparando solamente los experimentos con gas en circulación, se observa que el número de secuencias de símbolos encontrados es mayor a medida que la velocidad de gas aumenta. Para los experimentos en el régimen homogéneo, las frecuencias de símbolos que corresponden a la partícula en una única región (#1, 2, 4 y 8) son más frecuentes que para los experimentos en el régimen de flujo heterogéneo. Además, aquellos que corresponden a la partícula en dos regiones sucesivas son despreciables o nulos (#5, 7, 9-11,13-15). Para remarcar estas diferencias y obtener un indicador del régimen de flujo, se definieron nuevos símbolos grupales considerando las secuencias de símbolos que apuntan a la presencia del trazador en una o más regiones sucesivas o no sucesivas. Los grupos han sido clasificados de acuerdo con: símbolo A (solo una región: #1,2,4,8); símbolo B (solamente dos regiones sucesivas: #3,6,12); símbolo C (tres regiones sucesivas o dos regiones no sucesivas:#5,7,9,10,14) y el símbolo D (tres regiones no 217 sucesivas o cuatro regiones sucesivas:#11,13,15). Los histogramas correspondientes son presentados en la Figura IV.3.3. pi 1 pi 1 (a) 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 A pi 1 0.8 (b) B C D symbol Indice deindex símbolo A B C D symbol Indice de index símbolo pi 1 (c) (d) 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 A B C D symbol Indice de index símbolo A B C D symbol Indice de index símbolo Figura IV.3.3. Histogramas de las secuencias de símbolos agrupadas determinadas a partir de los desplazamientos axiales del trazador. Experimentos con GB 3mm a diferentes velocidades: (a) ug = 0m/s; (b) ug = 0.032m/s; (c) ug = 0.069m/s; (d) ug = 0.110m/s. uL = 0.032m/s; masa de sólidos = 0.4 kg. La Figura IV.3.3 pone de manifiesto, además de la gran diferencia encontrada entre los experimentos de fluidización líquido-sólido y de fluidización trifásica, que existe una clara tendencia decreciente en la frecuencia del símbolo A (partícula ubicada en una sola región) a medida que se incrementa la velocidad de gas. Esta tendencia se nivela aparentemente en el régimen heterogéneo, sugiriendo que este símbolo podría servir como indicador del régimen de flujo imperante en el lecho fluidizado. 218 IV.3.2. APLICACIÓN DE DINÁMICA SIMBÓLICA A SERIES TEMPORALES DE CUENTAS DE FOTONES REGISTRADOS DURANTE UN EXPERIMENTO DE RPT EN UNA COLUMNA DE BURBUJEO La metodología de análisis de series temporales explicada en la sección II.3.1 fue aplicada a las series temporales de las cuentas de fotones adquiridas por cuatro detectores dispuestos en fila durante el experimento de RPT descripto en la sección III.3.4 (Configuración C de detectores, Figura III.3.4.4) en la columna de burbujeo esquematizada en la Figura III.1.2. Para generar las series de secuencias de símbolos, las series temporales de las cuentas de fotones de los cuatro detectores dispuestos en fila (Figura IV.3.2.1) mientras una partícula radiactiva se movía libremente por la emulsión gas - líquido fueron convertidas en series de símbolos de acuerdo con la intensidad de las cuentas que registraron los detectores. Indirectamente, el lecho fue dividido axialmente en cuatro regiones. Se utilizó la misma secuencia de símbolos que en la sección IV.3.1 (0000, 0001, 0010, 0011, 0100, 0101, 0110, 0111, 1000, 1001, 1010, 1011, 1100, 1101, 1110, 1111). La frecuencia 0000 está prohibida dado que siempre hay un número máximo de cuentas entre los detectores estudiados. En cada intervalo de tiempo el número de cuentas registradas para cada detector es normalizada con respecto al detector que haya obtenido el mayor número de cuentas, por lo tanto para ese detector, el valor es un 1. Luego, se obtiene la secuencia de símbolos con el siguiente criterio: si la intensidad de cuentas normalizada es mayor o igual que 0.5 entonces se le asigna un 1, de lo contrario se le asigna un 0. Como en el análisis de la sección IV.3.1, la frecuencia relativa de cada secuencia depende de la intensidad del movimiento axial del trazador, pero esta vez sin haber tenido que recurrir al engorroso proceso de reconstrucción de la posición de la partícula mediante algún algoritmo (ver sección II.4.2, Reconstrucción de la posición de la partícula trazadora). La Figura IV.3.2.2 muestra los histogramas de las secuencias de ocurrencias de símbolos obtenidos a partir de las intensidades de las cuentas de los cuatro detectores dispuestos en fila durante el movimiento de la partícula trazadora en la columna de 219 burbujeo. Los índices de los símbolos utilizados en la figura son las representaciones decimales de los números binarios dados por las secuencias de símbolos. 0.4 0.35 0.3 Pi 0.25 0.2 0.15 0.1 0.05 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Indice de símbolo Figura IV.3.2.2 Simbolización estática: histogramas de las secuencias de símbolos determinadas a partir de las intensidades de cuentas de fotones adquiridas en 30ms por los cuatro detectores dispuestos en fila mientras se desplaza un trazador en la columna de burbujeo, ug = 0.08m/s. La Figura IV.3.2.2 pone de manifiesto una alta probabilidad para el símbolo cuya representación decimal es el 1. El mismo representa al símbolo (0001) e indica que el trazador permanece largos períodos en la zona inferior de la columna. Esto también se evidencia en la variación temporal de la coordenada axial determinada a partir del conteo simultáneo de los 10 detectores utilizados en el experimento para reconstruir el movimiento del trazador con el algoritmo Cross Correlation (ver Figura IV.2.3.3). A partir de la Figura IV.2.3.3, se infiere también que el trazador pasa largos períodos en la parte inferior de la columna antes de irrumpir en movimientos de subidas y bajadas atravesando axialmente toda la columna. La metodología de dinámica simbólica además permite cuantificar cuál es el porcentaje del tiempo que la partícula permanece en esa zona de la columna. Los segundos índices con mayor probabilidad y de probabilidad similar son el 3, 6 y 12 que representan el (0011), (0110) y (1100), respectivamente. El hecho de que estos tres símbolos tengan segunda probabilidad más alta y que la misma sea del mismo 220 orden provee información sobre los ascensos y descensos de la partícula a lo largo de toda la columna. Además, el hecho de que los símbolos que representen los ascensos y descensos sean el 3, 6 y 12 también proporciona información sobre la velocidad de estos ascensos y descensos de la partícula. Los símbolos evidencian que durante las subidas y/o bajadas hay dos detectores adyacentes por vez que “ven” pasar cerca la partícula. Este hecho indica que en 30ms (frecuencia de muestreo) la partícula recorre 1/3 de la distancia axial de la columna. De esta manera podríamos estimar una velocidad promedio de los ascensos y descensos rápidos de la partícula, así como también la frecuencia con la que ocurren dichos acontecimientos. En tercer lugar en orden de probabilidad, se encuentra el índice 8 (1000) representando las instancias en las cuales la partícula permanece en la sección superior de la columna luego de un ascenso rápido. Estos estadíos también pueden ser observados en la Figura IV.2.3.3 que muestra la variación temporal de la coordenada axial reconstruida. El cuarto lugar en orden de frecuencia relativa y de orden similar lo ocupan los índices 2, 4 y 7 (4 > 7 > 2), representando los símbolos (0010), (0100) y (0111) respectivamente. Los índices 2 y 4 representan la frecuencia relativa con la que el trazador se queda fluctuando en posiciones axiales intermedias y el índice 7 representa la frecuencia relativa con las que el trazador sufre ascensos muy rápidos que no llegan a la parte superior de la columna. Los índices con frecuencia relativa nula 9, 10, 11, 13 y 5 simbolizan situaciones imposibles ya que indicarían un movimiento no continuo del trazador. El índice 14, de probabilidad menor que el 1%, evidencia que existen muy pocas excursiones rápidas que tengan lugar en las tres cuartas partes superiores de la columna. La probabilidad casi nula del símbolo 15 pone de manifiesto que prácticamente no existen ascensos que atraviesen toda la columna en el tiempo observado de tres períodos de muestreo. En este análisis se pone de manifiesto que es posible obtener información útil de la dinámica de un sistema multifásico sin necesidad de atravesar el proceso de calibración inherente a un experimento de RPT. Los resultados pueden afinarse modificando el criterio de 0.5 impuesto para generar los símbolos. 221 IV.4. TEST DE DIKS IV.4.1. APLICACIÓN DEL TEST DE DIKS A SERIES TEMPORALES DE UNA COORDENADA DE RPT EN LECHOS FLUIDIZADOS TRIFÁSICOS. CLASIFICACIÓN DE RÉGIMEN DE FLUJO. El test de Diks et al. (1996) fue implementado en MatLab para calcular el estadístico S (ver sección II.3.2.1). En principio se analizaron series temporales de distinta longitud (N) tomadas de diferentes períodos de la trayectoria del trazador en distintas condiciones experimentales. Si bien se encontró que el test se vuelve más poderoso cuanto mayor es la longitud de las series temporales, es necesario encontrar un compromiso entre la longitud de la serie temporal y el tiempo de cómputo requerido para obtener los resultados. Elegimos N = 72000 dado que se encontró una buena reproducibilidad de los resultados en un tiempo de cómputo razonable. Los vectores de retraso fueron construidos utilizando intervalos de m datos con el objetivo de incrementar el tiempo de cálculo según lo propuesto por van Ommen et al. (2000). Para clasificar los regímenes de flujo, se tomaron por lo menos cinco series temporales de una de las coordenadas del trazador extraídas de las trayectorias reconstruidas para los distintos experimentos; las mismas fueron comparadas con una serie temporal de referencia. Luego, se calcula el estadístico S comparando el atractor reconstruido para una dada condición experimental con el atractor reconstruido para la serie de referencia a fin de evaluar la probabilidad de descartar o no la hipótesis nula de que ambos atractores correspondan al mismo régimen de flujo. Los parámetros del test que necesitan ser optimizados con el objetivo de minimizar las diferencias entre experimentos realizados bajo la misma condición hidrodinámica y maximizar las diferencias entre dos condiciones hidrodinámicas diferentes (ver sección II.3.2.1, Parámetros a tener en cuenta durante la implementación del test) fueron seleccionados utilizando los experimentos realizados a la menor velocidad superficial de líquido y en una columna de 0.1m de di (Equipo A) que se muestran en la Tabla III.4.1 de la sección experimental. 222 La dimensión, m, de los vectores de retraso fue elegida m = 20, en base a los resultados reportados por Cassanello et al. (1995), quienes calcularon la dimensión de correlación para el mismo sistema trifásico. En la Figura IV.4.1.1 se muestra la proyección en los dos primeros componentes principales obtenidos por descomposición de valores singulares (Broomhead y King, 1986) de un atractor reconstruido a partir de la coordenada x de la trayectoria determinada por RPT en un lecho trifásico conteniendo bolitas de vidrio de 3mm como fase sólida, para la menor velocidad de líquido estudiada en una de las columnas de 0.1m de diámetro interno (Equipo A). La realización de los gráficos de la figura es posible dado que casi la totalidad del porcentaje acumulado de variabilidad del sistema se presenta en los dos primeros componentes principales. Se observa que el tamaño del atractor se incrementa a medida que se incrementa la velocidad de gas, especialmente cuando se pasa de régimen homogéneo a heterogéneo. Figura IV.4.1.1. Atractores reconstruidos a partir de series temporales de la coordenada x del trazador determinada por RPT, proyectados en los 2 primeros componentes principales de una base obtenida por descomposición de valores singulares, para distintas velocidades de gas: ug = 0.032m/s (régimen homogéneo), ug = 0.069m/s y ug = 0.11m/s (régimen heterogéneo). Diámetro de columna = 0.1m, uL = 0.065 m/s, GB 3 mm. 223 En la Figura IV.4.1.2 se pone de manifiesto el efecto del parámetro d, el ancho de banda, en los resultados del test. Las mayores diferencias entre dos condiciones hidrodinámicas se encuentran para d = 0.8, pero como se mencionó en la sección II.3.2.1, para valores bajos de d, el test puede ser demasiado sensible a diferencias locales (Diks et al., 1996). Cuando d = 1, el test es muy poderoso, ya que la hipótesis nula no se rechaza nunca bajo las mismas condiciones hidrodinámicas y los valores se mantienen cercanos a cero. Cuando d = 1.2, el test es todavía capaz de discriminar entre dos condiciones hidrodinámicas distintas, pero si d es muy grande podría perderse resolución. Por estas razones se seleccionó d = 1 como una opción conservadora. S 50 Homogéneo Homogeneous Heterogeneous Heterogéneo 30 10 -10 0 0.02 0.04 0.06 0.08 0.1 0.12 ug (m/s) Gas velocity (m/s) d=0.8 d=1 d=1.2 S=3 Figura IV.4.1.2. Efecto del parámetro “d” sobre el estadístico S calculado teniendo en cuenta los atractores de los experimentos y tomando como referencia una serie temporal medida en el régimen homogéneo. Diámetro de columna = 0.1m, UL = 0.065 m/s, GB 3 mm. La línea de transición fue determinada por observación visual (Cassanello et al., 1995). El parámetro L está relacionado con la frecuencia de muestreo. En esta clase de experimentos, donde se cuentan los fotones emitidos por una fuente radiactiva, la frecuencia de muestreo no puede ser demasiado alta, dado que es necesario acumular un número significativo de cuentas durante un período de muestreo. Para los experimentos que se están analizando, las muestras fueron obtenidas cada 30ms (33Hz) o 50ms (20Hz), lo cual es compatible con el campo de velocidades de las partículas. La frecuencia de muestreo se selecciona de manera tal que la trayectoria de la partícula se reconstruya con buena resolución; por lo tanto, en este caso no hay sobremuestreo y los puntos sucesivos de las series temporales no presentan prácticamente correlación. 224 Además, en este caso, las series temporales no están dadas por fluctuaciones de una variable alrededor de un valor promedio como cuando se analizan series temporales de fluctuaciones de presión, sino que representan el seguimiento del movimiento de un trazador. En consecuencia, se varió la longitud del segmento L entre 0.25 y 1s, con el objetivo de evitar la correlación introducida por la construcción de los vectores (Diks et al. (1996), van Ommen et al. (2000)) y la correlación intrínseca del movimiento de la partícula en flujo turbulento. Los resultados obtenidos se muestran en la Figura IV.4.1.3. El test produjo buenos resultados para los tres valores de L examinados; es decir, se obtienen resultados de S cada vez mayores a medida que aumenta la certeza de que existe diferencia entre los diferentes estados hidrodinámicos comparados. Se eligió L = 33 porque en este caso se consideró que los resultados eran menos dispersos tomándose nuevamente una opción conservadora. Los resultados de las Figuras IV.4.1.2 y IV.4.1.3 coinciden con lo informado por van Ommen et al (2000) quienes utilizando fluctuaciones de presión, llegaron a la conclusión de que pequeñas variaciones alrededor de los parámetros óptimos no producen grandes diferencias en los resultados. S 70 Homogéneo Homogeneous Heterogeneous Heterogéneo 50 30 10 -10 0 0.02 L=33 0.04 0.06 L=16 0.08 0.1 0.12 ug (m/s) Gas velocity (m/s) L=8 S=3 Figura IV.4.1.3. Efecto del parámetro L sobre el estadístico S calculado teniendo en cuenta los atractores de los experimentos y tomando como referencia una serie temporal medida en el régimen homogéneo. Diámetro de columna = 0.1m, uL = 0.065 m/s, GB 3 mm. La línea de transición fue determinada por observación visual (Cassanello et al., 1995). 225 Luego, el conjunto de parámetros óptimos utilizado fue: m = 20, d = 1, L = 33, N = 72000. Los mismos fueron determinados una única vez y utilizados para todos los cálculos subsecuentes con datos en lechos fluidizados trifásicos. La Figura IV.4.1.4 muestra los resultados del test usando los parámetros óptimos para los experimentos realizados en una de las columnas de 0.1m de diámetro interno a una velocidad superficial de líquido de 0.065m/s con GB de 3 mm a diferentes velocidades superficiales de gas (Equipo A). S 50 Heterogeneous Heterogéneo Homogeneous Homogéneo 30 Limit for S with 95% of confidence 10 0 0.02 0.04 0.06 0.08 0.1 0.12 -10 Gas velocity (m/s) ug (m/s) Figura IV.4.1.4. Clasificación del régimen de flujo utilizando el estadístico S con parámetros óptimos para una de las columnas de 0.1m de diámetro interno a uL = 0.065 m/s y diferentes velocidades de gas, con GB de 3 mm. La línea de transición fue determinada por observación visual. (Cassanello et al., 1995). La Figura IV.4.1.5 muestra resultados obtenidos de otra columna de 0.1m (Equipo B) a dos velocidades de líquido distintas, ambas mayores a la estudiada en el Equipo A, usando los parámetros óptimos establecidos para los experimentos realizados en el Equipo A. En cada uno de los casos la serie de referencia es una condición muy bien establecida en régimen homogéneo para cada una de las velocidades de líquido, es decir, para cada velocidad superficial de líquido, la referencia es la menor velocidad superficial de gas estudiada para cada caso. 226 S 40 30 Homogeneous Homogéneo Heterogeneous Heterogéneo 20 10 Limit for S with 95% of confidence 0 0 0.02 0.04 0.06 0.08 0.1 0.12 -10 uL=0.1 m/s uL= 0.13 m/s ug (m/s) Gas velocity (m/s) Figure IV.4.1.5. Clasificación del régimen de flujo en un lecho fluidizado trifásico usando el estadístico S con parámetros optimizados. Diámetro de columna = 0.1 m, GB 3mm. Transición predicha por Zhang et al. (1997) para uL = 0.10m/s (—–) y uL = 0.13m/s (· – ·) correspondiente a GB de 4.5 mm. En el caso del Equipo B, la transición entre regímenes de flujo se infirió utilizando el mapa de flujo de Zhang et al. (1997) para GB de 4.5 mm. Según este mapa los experimentos realizados a uL = 0.10m/s y ug = 0.04m/s estarían en el régimen homogéneo, pero cercanos a la transición. Durante la realización de dicho experimento fue difícil clasificar al mismo como perteneciente al régimen homogéneo por inspección visual dado que tenía características de estar cercano a la transición (Limtrakul, 1996). La Figura IV.4.1.6 reproducida de Cheng et al. (1995), ilustra esquemáticamente como ocurre la transición entre regímenes de flujo homogéneo y heterogéneo o turbulento en un lecho fluidizado trifásico. Esta figura fue propuesta en base a observaciones visuales y análisis de señales de fluctuaciones de presión a distintas alturas en el lecho. A partir de sus resultados, los autores establecieron que cuando la velocidad de gas está lejos del rango de condiciones de operación que llevan a una transición, toda la columna se encuentra en el mismo régimen de flujo; es decir, toda en régimen homogéneo o toda en régimen heterogéneo. En cambio, cuando la velocidad de gas se encuentra cerca o en el rango de la transición, dos o tres regímenes vecinos podrían aparecer simultáneamente en la misma columna, cambiando desde homogéneo a turbulento desde el tope hasta la base de la columna. 227 Figura IV.4.1.6. Esquema de la distribución de regímenes de flujo cambiando a medida que aumenta la velocidad de gas. (a) Régimen homogéneo en toda la columna. (b) Régimen de transición aparece en el tope. (c) La transición se extiende hacia abajo. (d) Régimen turbulento aparece en el tope. (e) Régimen turbulento se extiende hacia abajo. (f) Régimen turbulento en toda la columna. HBR: régimen homogéneo, TR: transición, TBR: régimen turbulento o heterogéneo. Dado que en este análisis de clasificación de régimen de flujo, la variable característica es la trayectoria de una partícula sólida, el valor de S necesariamente dará algunos valores cercanos a 3, otros por encima y otros por debajo, para condiciones cercanas a la transición. Esto dependerá de la zona de la columna más frecuentada por el trazador durante el período seleccionado a partir de la trayectoria total para la realización de los cálculos. Por lo tanto, deberían explorarse varios períodos, especialmente cuando se trate de experimentos pertenecientes a condiciones cercanas a una transición de flujo, para los cuales se esperan valores cercanos a 3, tal como se evidencia en la Figura IV.4.1.5 para la condición cercana a la transición de flujo (uL = 0.10m/s y ug = 0.04m/s). Para la condición uL=0.13m/s y ug = 0.04m/s, todos los valores de S calculados permanecen por debajo de 3, dado que la transición de flujo se mueve hacia mayores velocidades de gas cuando la velocidad de líquido se incrementa, dentro del rango de velocidades de líquido estudiadas (Zhang et al., 1997); es decir, para esta velocidad superficial de líquido, la velocidad de gas se encuentra lejos de la región de transición de flujo. Estos resultados indican que el test es también sensible al efecto de la velocidad del líquido en la transición de flujo. A continuación se presentan resultados que muestran la robustez del test para clasificar regímenes de flujo. Con este objetivo se tomó como serie de referencia una 228 serie temporal perteneciente al experimento realizado a la menor velocidad superficial de gas (ug = 0.032m/s) y la menor velocidad superficial de líquido (uL= 0.065m/s), estudiadas. La misma, representa condiciones bien establecidas dentro del régimen homogéneo (inspección visual y corresponde bien con Nacef (1991) y Zhang et al. (1997)). Dicha serie se tomó como referencia para comparar con todos los experimentos estudiados hasta ahora, sin importar qué equipo de RPT se utilizó o cuál era la velocidad de líquido imperante. La Figura IV.4.1.7 muestra los resultados obtenidos para el estadístico S comparando la serie de referencia con series extraídas de los experimentos realizados en otra columna de 0.1m de diámetro (Equipo B). S 20 Homogéneo Homogeneous Heterogéneo Heterogeneous 10 Limit for S with 95% of confidence 0 0 0.02 0.04 0.06 0.08 0.1 0.12 -10 uL=0.1 m/s uL= 0.13 m/s ug (m/s) Gas velocity (m/s) Figura IV.4.1.7. Clasificación del régimen de flujo en un lecho fluidizado usando el estadístico S con parámetros optimizados, usando como referencia la menor velocidad de gas medida a uL = 0.065m/s (menor velocidad de líquido estudiada en esta columna) en otra columna de 0.1m de diámetro. GB 3mm. Transición predicha por Zhang et al. (1997) para uL = 0.10m/s (—–) y uL = 0.13m/s (· – ·) correspondiente a GB 4.5mm. Se observa que el test es capaz de discriminar regímenes de flujo, aunque la serie de referencia no sea obtenida bajo la misma velocidad superficial de líquido, y/o con otro equipo de RPT. En este caso, es importante mencionar que el tamaño de las dos columnas utilizadas para los experimentos (referencia y testeados) es la misma. También es importante aclarar que la serie temporal de referencia debe pertenecer a una condición de régimen homogéneo bien establecida. 229 El test también se utilizó para decidir si era posible diagnosticar el régimen de flujo cuando se utilizan mezclas de partículas sólidas de distintos tamaños. Los valores de S obtenidos para experimentos con mezclas de sólidos se muestran en la Tabla IV.4.1.2. GB 3mm(*) GB 3mm GB 3mm(*) GB 5mm GB 5mm(*) GB 1mm Velocidad superficial de líquido (m/s) 0.065 0.065 0.065 Velocidad superficial de gas (m/s) 0.032 0.032 0.11 1.17 1.95 48.21 Valores estimados del 1.59 1.12 47.42 estadístico S (**) 1.05 1.26 50.23 0.59 0.16 47.21 0.73 0.46 46.66 1.50 0.59 43.37 Partículas fluidizadas (*) sólido trazado (**) valores calculados a partir de series temporales extraídas de diferentes períodos de la trayectoria total. Tabla IV.4.1.2. Valores de S para mezclas de sólidos en régimen homogéneo y heterogéneo para experimentos en la columna de 0.1m de d.i. examinada con el Equipo A de RPT, usando como referencia el experimento con partículas simples de GB 3mm en régimen homogéneo en la misma columna. Como se observa en la tabla, el estadístico S es siempre menor que tres para experimentos realizados en régimen homogéneo, aún si la partícula que se traza es de 5mm (diferentes de aquellas utilizadas para obtener la serie de referencia). También diagnosticó apropiadamente el experimento realizado en régimen heterogéneo con una mezcla de partículas de vidrio de 3mm y 1mm. Finalmente, la misma referencia (ug = 0.032m/s, uL = 0.065m/s, GB 3mm, columna de 0.1m de d.i., que corresponde a condiciones bien establecidas de régimen homogéneo) fue utilizada para clasificar experimentos realizados en régimen heterogéneo en una columna de 0.14m de diámetro interno, utilizando bolitas de vidrio de 3mm y 1mm como partículas sólidas. Los resultados se muestran en la Figura IV.4.1.8 (a) y (b). Como se observa en la misma, el test es capaz de clasificar apropiadamente el régimen de flujo, aún cuando las series temporales testeadas y de 230 referencia pertenecen a experimentos realizados en columnas de distintos tamaños y con partículas de distintos tamaños. S 30 Heterogéneo Heterogeneous Homogéneo Homogeneous 20 10 Limit for S with 95% of confidence 0 0 0.02 0.04 0.06 0.08 0.1 0.12 -10 uL=0.07 m/s uL= 0.10 m/s ug (m/s) Gas velocity (m/s) (a) S 30 Heterogeneous Heterogéneo 20 10 Limit for S with 95% of confidence 0 0 0.02 0.04 0.06 0.08 0.1 -10 uL=0.04 m/s uL= 0.053 m/s ug velocity (m/s) (m/s) Gas (b) Figura IV.4.1.8. Clasificación de régimen de flujo en un lecho fluidizado trifásico usando el estadístico S, para distintas condiciones de operación en una columna de 0.14m de di usando como referencia el experimento a menor velocidad de gas y uL = 0.065 m/s en una columna de 0.1m de di. (a) GB 3mm, (b) GB 1mm. Transición predicha por Zhang et al. (1997) para (a) uL = 0.07m/s (—–) y uL = 0.10m/s (· – ·) correspondiente a GB 4.5mm. Aquellas para (b) uL = 0.04 m/s (—–) y uL = 0.053m/s (· – ·) corresponden a GB 1.5mm. 231 IV.4.2. APLICACIÓN DEL ESTADÍSTICO S PARA EL DIAGNOSTICO DE RÉGIMEN DE FLUJO EN COLUMNAS DE BURBUJEO A PARTIR DE DATOS DE RPT. VALIDACIÓN DE MEDICIONES DE FLUCTUACIONES DE PRESIÓN En la sección IV.4.1 se demostró que el test que calcula el estadístico S, es una poderosa herramienta para diagnosticar el régimen de flujo presente en lechos fluidizados trifásicos a partir de experimentos de RPT, eligiendo una de las coordenadas reconstruidas como variable característica. El test, clasificó satisfactoriamente el régimen de flujo para todas las condiciones estudiadas en tres situaciones independientes y utilizando dos equipos de RPT diferentes. Reflejó diferencias entre los atractores reconstruidos obtenidos bajo diferentes condiciones hidrodinámicas, independientemente de que los experimentos estuviesen medidos a distintas velocidades de líquido, con mezclas de partículas de diferentes tamaños o en columnas de diferente tamaño. A partir de los resultados de la sección IV.4.1 se establece que, para obtener buenos resultados del test, se debe tomar la precaución de elegir una serie de referencia apropiada. Esta se definiría como perteneciente a un experimento en condiciones estables, una vez definida la condición hidrodinámica que se quiera estudiar, en nuestro caso transición de régimen de flujo. El test arroja valores cercanos al límite (i.e. 3) para experimentos en condiciones cercanas a una transición de régimen de flujo. Por lo tanto, para estas condiciones, diferentes períodos de la serie temporal pueden llevar a valores por encima y/o por debajo de los límites del test. Naturalmente, experimentos en condiciones cercanas a la transición no deben ser tomados como referencia del estado hidrodinámico con el que se pretende establecer una diferencia. En este contexto, el objetivo de la presente sección es extender la aplicación del estadístico S a la comparación de atractores reconstruidos a partir de series temporales experimentales obtenidas por RPT en columnas de burbujeo. Los experimentos en columnas de burbujeo se realizaron en columnas de 0.19m y 0.14m de diámetro interno. 232 Adicionalmente a lo realizado para lechos fluidizados trifásicos se realizaron medidas de fluctuaciones de presión para las mismas condiciones que en los experimentos de RPT con el objetivo de comparar los resultados del test al cambiar la variable característica en el mismo sistema. La mayoría de las aplicaciones reportadas del estadístico S para comparar atractores reconstruidos a partir de series temporales experimentales medidas en sistemas multifásicos han sido utilizando mediciones de fluctuaciones de presión (van Ommen et al. (2000), Villa et al. (2003), Chaplin (2005), Strienstra et al. (2005), entre otros). A pesar de que los resultados reportados utilizando mediciones de fluctuaciones de presión han sido satisfactorios, es importante comparar resultados del estadístico S proveniente de la comparación de atractores reconstruidos a partir de diferentes variables características. Por otra parte, la medición de fluctuaciones de presión trae aparejada incertidumbre en la posición óptima de los sensores, sobre todo en equipos grandes. En este contexto, se aplicó el test de Diks con el objetivo de comparar atractores de una serie temporal experimental de referencia y una obtenida en una condición a testear, a partir de dos variables características diferentes medidas en el mismo sistema. De este modo, los experimentos de RPT permiten validar una técnica más económica y de más fácil implementación en la industria como las mediciones de fluctuaciones de presión. En la Figura IV.4.2.1 se grafican las proyecciones en los dos primeros componentes principales obtenidos por descomposición de valores singulares (Broomhead y King, 1986) de los atractores reconstruidos a partir de la coordenada x de la trayectoria del trazador en los experimentos de RPT realizados en la columna de burbujeo de 0.19m (Tabla III.5.1). La variabilidad del sistema se concentra en los dos primeros componentes principales para las tres condiciones experimentales. Se observa cómo el segundo componente del atractor va ganando en variabilidad a medida que se pasa de régimen homogéneo a heterogéneo, pasando por la transición. Luego, dado que el estadístico S está relacionado (a través de Q, Ec. II.3.2.1.17) con la distancia entre dos atractores, se espera que el mismo sea capaz de discriminar entre los diferentes estados hidrodinámicos en columnas de burbujeo con datos de RPT. 233 30 30 0.05 m/s 0.02 m/s 20 20 10 C2 C2 10 0 0 -10 -10 -20 -20 -30 -60 -40 -20 0 C1 20 40 -30 -60 60 -40 (a) -20 0 C1 20 40 60 (b) 30 0.12 m/s 20 C2 10 0 -10 -20 -30 -60 -40 -20 0 C1 20 40 60 (c) Figura IV.4.2.1. Atractores reconstruidos proyectados en los dos primeros componentes principales de una base obtenida por descomposición en valores singulares a partir de datos de RPT obtenidos en una columna de burbujeo de 0.19m de diámetro interno. Condiciones de operación: (a) ug = 0.02m/s (régimen homogéneo), (b) ug = 0.05 m/s (transición), (c) ug = 0.12m/s (régimen heterogéneo). En la Figura IV.4.2.2 se muestran los resultados del estadístico S para datos de RPT obtenidos en una columna de burbujeo de 0.19m de diámetro interno, utilizando los parámetros optimizados para el lecho fluidizado trifásico (m = 20, d = 1, L = 33, largo de la serie, N = 72000 puntos). La referencia es una serie temporal extraída de la condición experimental bajo régimen homogéneo (ug = 0.02m/s). Se observa que para series temporales en la condición medida en régimen homogéneo (ug = 0.02m/s) todos los valores de S calculados permanecen por debajo de 3 (tres) y muy cercanos a cero, como es de esperar cuando se examinan series temporales pertenecientes al mismo estado hidrodinámico. En el caso de la condición ug = 0.12m/s (régimen heterogéneo), el test indica una alta probabilidad de que los dos atractores comparados pertenezcan a 234 estados hidrodinámicos diferentes. Para la condición intermedia, perteneciente a la transición, el test es capaz de predecirla utilizando los mismos parámetros que fueron optimizados para lechos fluidizados trifásicos. El comportamiento del estadístico S para esta condición es análogo a lo observado en el caso de condiciones de transición para lechos fluidizados trifásicos. Se obtienen valores cercanos a 3, alternando por encima y por debajo, dependiendo de donde estuvo concentrada la trayectoria de la partícula en el intervalo de tiempo correspondiente a la serie temporal que se examina en cada caso. 40 30 S 20 Limite de S co n 95% de co nfianza 10 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 -10 ug (m /s) Figura IV.4.2.2. Clasificación del régimen de flujo utilizando el estadístico S en una columna de burbujeo de 0.19m de diámetro interno, utilizando los parámetros optimizados para lechos fluidizados trifásicos. Condiciones de operación: ug = 0.02m/s (régimen homogéneo), ug = 0.05m/s (transición), ug = 0.12m/s (régimen heterogéneo). En la Figura IV.4.2.3 se observan los resultados del estadístico S para datos de RPT obtenidos en una columna de burbujeo de menor tamaño (0.14m de diámetro interno) utilizando los mismos parámetros. Se observa que, como en el caso de la columna de mayor tamaño, los resultados son satisfactorios. El test es capaz de discriminar entre el régimen homogéneo y heterogéneo para las condiciones estudiadas y arroja valores explicables para la condición intermedia. Este experimento fue realizado a una velocidad superficial de gas de 0.048m/s, es decir que representa una condición muy cercana al comienzo del intervalo de transición de estos experimentos (0.05 y 0.07 m/s). Los valores arrojados por el test son valores por debajo de tres pero algunos de ellos se acercan al límite. 235 40 30 S 20 Limite de S co n 95% de co nfianza 10 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 -10 ug (m /s) . Figura IV.4.2.3. Clasificación del régimen de flujo utilizando el estadístico S en una columna de burbujeo de 0.14m de diámetro interno con datos de RPT, utilizando los parámetros optimizados para lechos fluidizados trifásicos. Condiciones de operación: ug = 0.02m/s (régimen homogéneo), ug = 0.048 m/s (transición), ug = 0.12m/s (régimen heterogéneo). Dados los resultados satisfactorios encontrados al aplicar el test de Diks en columnas de burbujeo para datos de RPT, se analizó si se obtenían resultados similares con otra variable característica, más sencilla de medir en la industria, para el mismo sistema. Se utilizaron mediciones de fluctuaciones de presión como segunda variable característica. Para poder realizar comparaciones sobre el efecto de cambiar la variable característica, se realizaron mediciones de fluctuaciones de presión en los casos en los que se podían lograr las mismas condiciones en las que se habían realizado los experimentos de RPT. Idénticas condiciones fueron posibles de reproducir solamente en la columna de 0.19m de diámetro. En la columna de 0.14m no se pudieron reproducir exactamente las mismas condiciones de régimen homogéneo para la cual se tenían datos de RPT porque se había modificado la instalación de circulación de fluidos. La Figura IV.4.2.4 muestra los atractores reconstruidos proyectados en los dos primeros componentes principales calculados a partir de las fluctuaciones de presión obtenidas del sensor ubicado a 82cm por encima del distribuidor (ver sección III.6, Figura III.6.4) para las mismas condiciones de operación que la Figura IV.4.2.1. Se observa nuevamente cómo el tamaño del atractor va creciendo a medida que aumenta la velocidad de gas, si bien en este caso el aumento es significativo en ambas direcciones, 236 aunque mayor en el segundo componente. Estos resultados sugieren que el test será capaz de discriminar apropiadamente entre distintos estados hidrodinámicos en columnas de burbujeo utilizando mediciones de fluctuaciones de presión. 0.25 0.25 0.02 m/s 0.2 0.15 0.15 0.1 0.1 0.05 0.05 0 0 C2 C2 0.05 m/s 0.2 -0.05 -0.05 -0.1 -0.1 -0.15 -0.15 -0.2 -0.2 H = 82 cm -0.25 H = 82 cm -0.25 -0.5 -0.4 -0.3 -0.2 -0.1 0 C1 0.1 0.2 0.3 0.4 0.5 -0.5 -0.4 -0.3 (a) -0.2 -0.1 0 C1 0.1 0.2 0.3 0.4 0.5 (b) 0.12 m/s 0.25 0.2 0.15 0.1 C2 0.05 0 -0.05 -0.1 -0.15 -0.2 H = 82 cm -0.25 -0.5 -0.4 -0.3 -0.2 -0.1 0 C1 0.1 0.2 0.3 0.4 0.5 (c) Figura IV.4.2.4. Atractores reconstruidos proyectados en los 2 primeros componentes principales de una base obtenida por descomposición en valores singulares a partir de datos de fluctuaciones de presión obtenidas con el sensor ubicado a H = 82 cm por encima del distribuidor en una columna de burbujeo de 0.19m de diámetro interno. Condiciones de operación: (a) ug = 0.02m/s (régimen homogéneo), (b) ug = 0.05m/s (transición), (c) ug = 0.12m/s (régimen heterogéneo). A fin de seleccionar los parámetros óptimos del test para ambas variables características, se analizó el efecto sobre los resultados del test de cambiar progresivamente los parámetros para ambas variables bajo las mismas condiciones experimentales. En todos los casos, se utilizó como serie temporal de referencia, una medida en condiciones estables de régimen homogéneo. En el caso de las fluctuaciones de presión cuando se estudian columnas de escala piloto, donde es necesario utilizar más de un sensor para monitorear la columna existen 237 dos formas de calcular el estadístico S. Dado que se realizó la medida simultánea de cuatro sensores de presión a distintas alturas en la columna, se puede considerar independientemente cada una de las señales de fluctuaciones de presión y obtener un S local para cada uno. Esta opción es útil porque, al tener experimentos de RPT en idénticas condiciones, se puede validar la técnica y estudiar cuál es la posición del sensor que conduce a resultados más confiables. La segunda posibilidad es la de monitorear la columna como un todo y obtener un valor de S global a partir de la respuesta conjunta de todos los sensores. En ese caso, se estudió la propuesta de van Ommen et al. (2000) para multiseñales y se la comparó con el promedio de la respuesta individual de los cuatro sensores. Se examina, a continuación, la influencia de los parámetros L y d sobre los resultados del estadístico S utilizando como variable característica: a) Datos de RPT b) Fluctuaciones de presión calculando un S local para la respuesta de cada sensor c) Fluctuaciones de presión calculando un S global a partir de la respuesta conjunta de los cuatro sensores (propuesto por van Ommen et al., 2000). Parámetro L En la Figura IV.4.2.5 se observa cómo se comporta el estadístico S cuando se varía el parámetro L para las tres condiciones estudiadas (régimen homogéneo, transición y heterogéneo) cuando la variable característica es una coordenada de la trayectoria de un trazador obtenida a partir de experimentos de RPT. Para la condición en régimen homogéneo y transición no parece tener ninguna influencia, en ambas condiciones el test arroja prácticamente los mismos resultados para todos los L estudiados. En el caso de la condición en régimen heterogéneo los valores de S decrecen a medida que se incrementa L y aparentemente tienden hacia algún valor constante para L grandes. 238 50 40 30 S 0.02 m/s 0.05 m/s 0.12 m/s 20 10 0 0 20 40 60 80 100 -10 L (#) Figura IV.4.2.5. Influencia del parámetro L sobre los resultados del test para experimentos de RPT en la columna de burbujeo de 0.19m de diámetro interno. Condiciones de operación: ug = 0.02m/s (régimen homogéneo), ug = 0.05m/s (transición), ug = 0.12m/s (heterogéneo). La Figura IV.4.2.6 muestra que el efecto del parámetro L sobre el estadístico S no varía sustancialmente al cambiar la variable característica. Para las tres condiciones de operación estudiadas la tendencia del estadístico S es similar a la obtenida en la Figura IV.4.2.5 para los datos de RPT. Es decir, la influencia del parámetro L es la misma para ambas variables examinadas. En el caso de las fluctuaciones de presión se observa, como en el caso de RPT, que la condición más sensible al parámetro L es la condición en régimen heterogéneo. En este caso se observa también que la sensibilidad con respecto a este parámetro depende de la ubicación del sensor de presión, acentuándose esta tendencia en los sensores ubicados a mayor altura (Figura IV.4.2.6 (a) y (b)). De todas maneras, todos los L estudiados son capaces de clasificar satisfactoriamente las condiciones imperantes en la columna de burbujeo a partir del análisis individual de cada uno de los sensores. 239 120 160 H = 82 cm 140 H = 67 cm 100 120 80 100 60 S S 80 60 40 40 0.02 m/s 0.05 m/s 0.12 m/s 20 0.02 m/s 0.05 m/s 20 40 0.12 m/s 20 0 0 -20 0 20 40 60 80 0 100 80 100 L (#) L (#) 70 70 H = 33 cm 60 50 50 40 40 30 30 0.02 m/s 20 0.05 m/s H = 18 cm 60 S S 60 -20 0.12 m/s 0.02 m/s 0.05 m/s 0.12 m/s 20 10 10 0 0 0 20 40 60 -10 L (#) 80 100 -10 0 20 40 60 80 100 L (#) Figura IV.4.2.6. Influencia del parámetro L sobre los resultados del test para medidas de fluctuaciones de presión realizadas con 4 sensores ubicados a distintas alturas en la columna de burbujeo de 0.19m. Condiciones de operación: ug = 0.02m/s (régimen homogéneo), ug = 0.05m/s (transición), ug = 0.12m/s (heterogéneo). En la Figura IV.4.2.7 se observa la influencia del parámetro L sobre el test para cada una de las tres condiciones experimentales examinadas, cuando el estadístico S se calcula considerando en forma conjunta las medidas realizadas con los cuatro sensores siguiendo el procedimiento propuesto por van Ommen et al. (2000). Cuando se calcula el S global, el test es capaz de clasificar adecuadamente los regímenes de flujo presentes en cada condición utilizando cualquiera de los valores del parámetro L dentro del rango estudiado. Puede observarse que los resultados del S global al variar L siguen las mismas tendencias que los S locales, siendo el comportamiento cualitativamente más parecido al del sensor más sensible (el que se encuentra a mayor altura). La diferencia que se pone claramente de manifiesto entre los resultados obtenidos en las Figuras IV.4.2.5 a IV.4.2.7 es la sensibilidad del test cuando se comparan atractores 240 reconstruidos a partir de series temporales medidas en régimen heterogéneo con los correspondientes a la serie de referencia medida en régimen homogéneo. 110 0.02 m/s 0.05 m/s 90 0.12 m/s S global 70 50 30 10 -10 0 20 40 60 80 100 L (#) Figura IV.4.2.7. Influencia del parámetro L sobre los resultados del estadístico S global calculado a partir de la respuesta simultánea de los 4 sensores de presión ubicados a distintas alturas en la columna de burbujeo de 0.19m. Condiciones de operación: ug = 0.02m/s (régimen homogéneo), ug = 0.05m/s (transición), ug = 0.12m/s (heterogéneo). Parámetro d La Figura IV.4.2.8 muestra la performance del estadístico S para distintos valores de d usando datos de RPT como variable característica. Puede observarse que este parámetro tiene mayor influencia en los resultados que el parámetro L. Para la condición en régimen heterogéneo se observa que los resultados son muy sensibles a este parámetro. El valor de S aumenta progresivamente y con una alta pendiente a medida que disminuye el valor de d. Esto se debe a que, a medida que aumenta d, se van aplanando las distribuciones de los vectores de retraso al punto de volverse casi indistinguibles cuando d es muy grande (Diks et al., 1996). 241 90 0.02 m/s 80 0.05 m/s 70 0.12 m/s 60 S 50 40 30 20 10 0 -10 0 0.5 1 1.5 d Figura IV.4.2.8. Influencia del parámetro d sobre el estadístico S calculado a partir de experimentos de RPT en una columna de burbujeo de 0.19m. Condiciones de operación: ug = 0.02m/s (régimen homogéneo), ug = 0.05m/s (transición), ug = 0.12m/s (heterogéneo). En la mayoría de los casos estudiados en la literatura utilizando el estadístico S el objetivo ha sido distinguir entre dos estados hidrodinámicos distintos. En consecuencia, el criterio para la elección de los parámetros óptimos era tal que se obtuvieran resultados por debajo de 3 y lo más cercanos a cero cuando se analizan series temporales de alguna variable pertenecientes a experimentos bajo el mismo estado hidrodinámico: régimen de flujo, concentración de arena, tamaño de partículas, etc.; y que los resultados arrojados por el test cuando se analizan dos estados hidrodinámicos distintos presenten la mayor diferencia posible. En este caso, el criterio debe ser más estricto, dado que el objetivo es clasificar regímenes de flujo y ser capaces de predecir la zona de transición. Por lo tanto es importante estudiar el efecto de los parámetros en los resultados del test en las condiciones de transición utilizando una variable característica que proporcione información completa acerca del fenómeno. Cuando se aplica el test a datos de RPT bajo condiciones de transición se espera obtener valores cercanos a 3, con algunos valores por encima y por debajo. Este comportamiento se debe al hecho de que la transición de régimen de flujo no es un fenómeno instantáneo y que el mismo puede no estar totalmente establecido en toda la columna. Luego, de la misma manera que se argumentó en la sección IV.4.1 para lechos fluidizados trifásicos, trayectorias del trazador provenientes de distintos sectores en diferentes períodos de tiempo llevarán a valores de S por encima y por debajo de 3, dependiendo de la región 242 de la columna más visitada por el trazador durante el período en el cuál se analizan las series temporales para calcular S. Esta situación queda manifiesta en la Figura IV.4.2.8 observando la tendencia de S en la condición de transición (ug = 0.05m/s), para valores de d = 1 o mayores. Cuando el valor de d es menor que uno, el test comienza a tener en cuenta diferencias locales (Diks et al., 1996) llevándonos a la conclusión de que la columna ya está operando en régimen heterogéneo. En base a estos resultados, se eligió trabajar con d = 1. En la Figura IV.4.2.9 se observa cómo influye el parámetro d sobre el estadístico S cuando se analizan las series temporales medidas con cada uno de los cuatro sensores utilizados. La tendencia general obtenida es la misma que cuando la variable característica es una coordenada de la trayectoria de la partícula. En este caso, la sensibilidad del estadístico S con respecto al parámetro d también depende de por la posición del sensor en la columna. La respuesta esperada del test para todas las condiciones de operación es obtenida para los cuatro sensores para d = 1 o mayor como en el caso de utilizar datos de RPT. En la Figura IV.4.2.10 se muestra la influencia del parámetro d cuando se calcula un S global a partir de la respuesta conjunta de los cuatro sensores. Se observa que el efecto del parámetro d sobre la performance del test se atenúa comparado con los resultados obtenidos con datos de RPT o para la respuesta individual de cada uno de los sensores. Todos los valores de d examinados conducen a la respuesta deseada. La tendencia del estadístico S con el parámetro d se modifica en régimen heterogéneo respecto de las determinadas a partir de mediciones locales. Generalmente, se espera que S disminuya a medida que aumenta d pero en este caso, a diferencia de los resultados obtenidos con datos de RPT y S local para cada sensor, el valor de S global aumenta a medida que aumenta d para condiciones de operación en régimen heterogéneo. 243 80 120 0.02 m/s 100 H = 33 cm 70 0.05 m/s 0.12 m/s H = 18 cm 80 0.02 m/s 50 0.05 m/s 40 0.12 m/s S S 60 60 30 40 20 20 10 0 0 0.5 1 0 1.5 -20 -10 0 0.5 d 1 1.5 d 140 120 H = 67 cm 100 0.02 m/s 80 0.05 m/s 60 H = 82 cm 120 100 0.02 m/s 80 0.05 m/s 0.12 m/s S S 0.12 m/s 60 40 40 20 20 0 0 0 0.5 1 1.5 -20 -20 0 0.5 d 1 1.5 d Figura IV.4.2.9. Influencia del parámetro d sobre los resultados del test determinados a partir de fluctuaciones de presión medidas con 4 sensores ubicados a distintas alturas en la columna de burbujeo de 0.19m. Condiciones de operación: ug = 0.02m/s (régimen homogéneo), ug = 0.05m/s (transición), ug = 0.12m/s (heterogéneo). 90 80 70 S global 60 50 0.02 m/s 40 0.05 m/s 30 0.12 m/s 20 10 0 -10 0 0.5 1 1.5 d Figura IV.4.2.10. Influencia del parámetro d sobre el estadístico S global calculado a partir de la respuesta simultánea de los 4 sensores de presión ubicados a distintas alturas en la columna de burbujeo de 0.19m. Condiciones de operación: ug = 0.02m/s (régimen homogéneo), ug = 0.05m/s (transición), ug = 0.12m/s (heterogéneo). 244 El análisis de la influencia de los parámetros sobre los resultados del test, realizado sobre las dos variables características estudiadas pone de manifiesto que puede utilizarse el mismo conjunto de parámetros óptimos para ambas variables (datos de RPT y fluctuaciones de presión). Naturalmente estos resultados necesitan más exploración experimental para su generalización y no pueden tomarse como conclusión general para cualquier sistema y/o variable característica. Estos resultados indicarían que es posible ajustar los parámetros óptimos del test para condiciones conocidas, por ejemplo con datos de RPT, tomándolos como referencia del comportamiento del sistema y luego ajustar los parámetros para cualquier otra variable característica más fácil de medir, como fluctuaciones de presión, hasta obtener la tendencia encontrada para los datos de RPT. De todos modos, como se observa en las figuras IV.4.2.5 a IV.4.2.10, existe un amplio rango de valores de parámetros óptimos, y desviaciones alrededor de los mismos no producen grandes variaciones en los resultados del test. Este resultado coincide nuevamente con la apreciación reportada por van Ommen et al. (2000) para monitoreo de lechos fluidizados. En la Figura IV.4.2.11 se presentan los resultados obtenidos con el test de Diks con los parámetros óptimos (m = 20, d = 1, L = 33, N = 72000) para ambas variables características estudiadas para las tres condiciones de operación estudiadas: régimen homogéneo, transición y heterogéneo. En la Figura IV.4.2.11 (a) se representan los resultados del estadístico S calculado a partir de una coordenada de la trayectoria determinada por RPT en función de la velocidad de gas, variable que induce el cambio de régimen de flujo en la columna de burbujeo. En la misma se observa que las diferentes condiciones hidrodinámicas exploradas son clasificadas de manera satisfactoria cuando se utiliza el estadístico S para comparar el correspondiente atractor con el perteneciente a la condición de referencia en régimen homogéneo. En la Figura IV.4.2.11(b) se representa el estadístico S en función de la velocidad del gas para las mismas condiciones, considerando la respuesta de cada uno de los sensores de presión dispuestos a lo largo de la columna. Cada condición de régimen de flujo es diagnosticada apropiadamente comparando los atractores generados reconstruidos a partir de la respuesta de los cuatro sensores, aunque la sensibilidad del test es diferente para diferentes posiciones de los sensores a lo largo de la columna. La transición se determina mejor analizando las series temporales medidas por los sensores ubicados más lejos del distribuidor. Si se observa la respuesta de los cuatro sensores de 245 presión en conjunto la clasificación obtenida es equivalente a la determinada analizando una coordenada de la trayectoria de la partícula. La Figura IV.4.2.12 presenta los resultados del S global determinado a partir de la respuesta conjunta de los cuatro sensores según el método presentado por van Ommen et al. (2000). El S global sigue caracterizando el régimen de flujo según lo esperado (valores cercanos a cero y menores que tres para el régimen homogéneo, valores mayores y menores que tres y/o cercanos al límite del test para la transición y valores mucho mayores que 3 para condiciones experimentales muy alejadas de la transición). 110 40 H = 82 cm 90 30 70 S S 20 Limite de S co n 95% de co nfianza 10 H = 67 cm H = 33 cm H = 18 cm 50 Limite de S co n 95% de co nfianza 30 0 10 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 -10 0 -10 ug (m /s) 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug (m /s) (a) (b) Figura IV.4.2.11. Clasificación del régimen de flujo utilizando el estadístico S en una columna de burbujeo de 0.19m de diámetro interno, utilizando los parámetros optimizados (m = 20, L = 33, d = 1). Condiciones de operación: ug = 0.02m/s (régimen homogéneo), ug = 0.05 m/s (transición), ug = 0.12m/s (régimen heterogéneo). (a) S calculado a partir de una coordenada determinada por RPT. (b) S calculado localmente para cada una de las series temporales de fluctuaciones de presión medidas con los cuatro sensores distribuidos a lo largo de la columna. 246 90 S_global 70 50 30 Limite de S co n 95% de co nfianza 10 -10 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug (m /s) Figura IV.4.2.12. Clasificación del régimen de flujo mediante el estadístico S global calculado a partir de la respuesta conjunta de los cuatro sensores de presión distribuidos a lo largo de la columna de burbujeo de 0.19m de diámetro interno. Condiciones de operación: ug = 0.02m/s (régimen homogéneo), ug = 0.05m/s (transición), ug = 0.12m/s (régimen heterogéneo). Parámetros optimizados: m = 20, L = 33, d = 1. Una vez establecido el conjunto de parámetros óptimos para analizar series temporales de fluctuaciones de presión comparando con los resultados obtenidos con datos de una técnica tan poderosa como RPT, se procedió a examinar exhaustivamente la capacidad del método para clasificar regímenes de flujo. En particular, se estudiaron condiciones de operación próximas a la transición y altas velocidades de gas. En la Figura IV.4.2.13 se observan los resultados del estadístico S calculado a partir de las series temporales de fluctuaciones de presión medidas con los cuatro sensores en la columna de 0.19m para todas las condiciones experimentales estudiadas. La misma pone de manifiesto la habilidad del método para clasificar el régimen de flujo de la columna de burbujeo bajo las condiciones examinadas. El estadístico S arroja valores menores que 3 para las condiciones en régimen homogéneo y alrededor de 3 para condiciones cercanas a la transición (ug ≈ 0.05m/s). Es esperable que todas las condiciones con velocidad de gas por debajo de este valor conduzcan a resultados del estadístico S menores que 3, pues se encontrarían en el mismo régimen que la serie de referencia que corresponde al régimen homogéneo. A mayores velocidades superficiales de gas, el estadístico S se vuelve rápidamente mayor que 3 y se incrementa con una alta pendiente con el incremento en la velocidad superficial del gas (hasta ug alrededor de 0.12m/s) debido a un incremento en la distancia Q (ver Ec. II.3.2.1.17) entre atractores pertenecientes a las condiciones hidrodinámicas testeadas y de referencia (régimen 247 homogéneo). Simultáneamente, hay un decremento en la varianza de Q, que conduce a una mayor certeza en el resultado de la comparación. Para velocidades de gas suficientemente altas, en régimen heterogéneo altamente turbulento, el estadístico S tiende aparentemente a un valor constante o hasta decrece levemente con el aumento de la velocidad de gas. 80 90 70 80 H = 18 cm H = 33 cm 70 60 60 50 50 S S 40 40 30 30 20 20 (a) 10 (b) 10 0 0 0 -10 0.05 0.1 0.15 0.2 0.25 -10 0 0.05 ug (m /s) 0.25 H = 82 cm H = 67 cm 90 70 70 50 50 30 30 (c) (d) 10 -10 0 0.2 110 S S 0.15 ug (m /s) 110 90 0.1 10 0.05 0.1 0.15 ug (m /s) 0.2 0.25 -10 0 0.05 0.1 0.15 0.2 0.25 ug (m /s) Figura IV.4.2.13. Clasificación del régimen de flujo mediante el estadístico S calculado a partir de la respuesta independiente de los cuatro sensores de presión ubicados en distintas posiciones axiales de la una columna de burbujeo de 0.19m de diámetro interno en un amplio rango de condiciones de operación. Parámetros: m = 20, L = 33, d = 1. A pesar de que el análisis de las señales de cada uno de los cuatro sensores provee resultados satisfactorios, los sensores más cercanos a los extremos de la columna (H = 18 cm y H = 82 cm) están más sujetos a errores de clasificación cuando la columna opera en régimen de flujo homogéneo. Este hecho es entendible dado que tanto en la 248 zona próxima al distribuidor como en la próxima a la frontera de la emulsión, se encuentran heterogeneidades en el flujo. La Figura IV.4.2.14 muestra los resultados del test calculando dos tipos diferentes de estadísticos globales: el promedio aritmético de los resultados individuales de cada sensor y el obtenido a partir del análisis de la respuesta conjunta de los cuatro sensores propuesto por van Ommen et al. (2000). Se observa que comparando los atractores mediante los estadísticos globales, se obtiene una buena clasificación de los regímenes de flujo para todas las condiciones experimentales estudiadas, mitigando los errores ocasionales de clasificación encontrados durante el análisis de las respuestas individuales de las señales. Estos resultados enfatizan la importancia de monitorear una columna de escala piloto o industrial con varios sensores ubicados a lo largo de toda la columna para evitar efectos locales. Los resultados ilustrados en la Figura IV.4.2.14 muestran que se obtuvieron resultados similares, ya sea calculando el S global obtenido a partir de la respuesta conjunta de los cuatro sensores propuesto por van Ommen et al (2000) para múltiples señales, o determinando el promedio de las respuestas individuales de los cuatro sensores. De todas formas, el método para calcular el S global propuesto por van Ommen et al (2000), conduce a una mejor estimación de la distancia entre atractores mostrando una menor variabilidad entre las diferentes porciones de las series temporales y mitigando apropiadamente los errores de clasificación encontrados durante el análisis de las respuestas locales. Por lo tanto, esta metodología de análisis es aparentemente más robusta. 249 90 70 80 70 50 60 S S global 50 30 40 Average Promedio 30 (a) (b) 20 10 10 0 0.00 0.05 0.10 0.15 -10 ug (m /s) 0.20 0.25 -10 0 0.05 0.1 0.15 0.2 0.25 ug (m /s) Figura IV.4.2.14. Clasificación del régimen de flujo mediante el estadístico S calculado a partir de la respuesta de los cuatro sensores de presión ubicados en distintas posiciones axiales de la una columna de burbujeo de 0.19m de diámetro interno en un amplio rango de condiciones de operación, utilizando los parámetros optimizados. (a) Estadístico S global calculado partir de la respuesta conjunta de los cuatro sensores en simultáneo con la metodología propuesta por van Ommen et al, 2000. (b) S global obtenido a partir del promedio de las respuestas individuales de los cuatro sensores. En la columna de 0.19m de di, se midieron fluctuaciones de presión en las mismas condiciones que se habían estudiado con experimentos de RPT y se determinó el estadístico S para ambas variables. Se ajustaron los parámetros óptimos para utilizar las medidas de fluctuaciones de presión, validándolos con el comportamiento encontrado en el estadístico con una variable más confiable como una de las coordenadas reconstruidas a partir de experimentos de RPT. Una vez validados los resultados obtenidos para ambas variables para las mismas condiciones de operación, se extendieron las condiciones experimentales estudiadas a un amplio rango de operación. Con los parámetros antes optimizados se estudió tanto el comportamiento local como global de la columna. Ambos análisis resultaron útiles porque pusieron de manifiesto la importancia del buen funcionamiento de los sensores de presión y que estos cumplan con todas los requisitos que necesitan, como por ejemplo, la total cobertura de agua durante toda la operación, para la obtención de resultados confiables y reproducibles. De no cumplirse, podría llevar a conclusiones erróneas o a falsas alarmas de que algún problema hidrodinámico esta ocurriendo. En este contexto, también se pone de manifiesto la importancia de que este tipo de medidas globales puedan ser validadas por otra técnica como RPT. 250 Con el objetivo de ampliar y extender los resultados expuestos hasta el momento, a continuación se muestran los resultados del estadístico S arrojados para las fluctuaciones de presión medidas en la columna de 0.14m de di., utilizando los parámetros ya optimizados para la columna de 0.19m de di. Para esta columna no se pudieron reproducir exactamente las condiciones experimentales de régimen homogéneo que se utilizaron para los experimentos de RPT. Para la realización de las medidas de fluctuaciones de presión la condición más baja de velocidad de gas que se pudo obtener fue 0.036m/s. Para RPT era 0.02m/s. En la Figura IV.4.2.16 se muestran los resultados del estadístico S para los datos de RPT y de los cuatro sensores de presión. Se observa que, mientras los sensores ubicados a 38, 68 y 83 cm del distribuidor tienen el comportamiento esperado para una situación de transición para la condición de 0.048m/s, el sensor ubicado más próximo al límite superior de la emulsión (H = 98cm) arroja valores mayores indicando régimen heterogéneo. Este resultado demuestra nuevamente la importancia de la validación de estos experimentos y de la correcta ubicación del sensor. Los resultados también demuestran que para equipos grandes es necesario un número de sensores adecuado que permita el estudio de la totalidad de la columna ya que pueden ocurrir fenómenos locales. 251 80 40 70 H = 98 cm 60 30 H = 83 cm 50 H = 68 cm 40 Limite de S co n 95% de co nfianza 10 H = 38 cm S S 20 30 Limite de S co n 95% de co nfianza 20 10 0 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0 -10 -10 ug (m /s) (a) 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 ug (m /s) (b) Figura IV.4.2.16. Clasificación del régimen de flujo utilizando el estadístico S en una columna de burbujeo de 0.14m de diámetro interno, utilizando los parámetros optimizados. (a) S calculado a partir de la coordenada x reconstruida a partir de experimentos de RPT. Condiciones de operación: ug = 0.02m/s (régimen homogéneo), ug = 0.048m/s (cercano a transición), ug = 0.12m/s (régimen heterogéneo). (b) S calculado con las series temporales de fluctuaciones de presión de cada uno de los cuatro sensores distribuidos a lo largo de la columna. Condiciones de operación: ug = 0.036m/s (régimen homogéneo), ug = 0.048m/s (cercano a transición), ug = 0.12m/s (régimen heterogéneo). En la Figura IV.4.2.17 se muestra el resultado del S promedio de las señales individuales y del calculado globalmente mediante el procedimiento propuesto por van Ommen et al. (2000). Puede observarse que el promedio indica incorrectamente que la condición de transición corresponde a una de régimen heterogéneo por la fuerte influencia de los resultados del sensor a 98cm. Por el contrario, el S calculado globalmente da una idea del comportamiento de la mayor parte de la columna. 252 80 80 70 70 60 60 Promedio 50 S_global 50 S 40 30 Limite de S co n 95% de co nfianza 20 30 Limite de S co n 95% de co nfianza 20 10 10 0 0 -10 40 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 -10 0 0.02 0.04 0.06 0.08 ug (m /s) ug (m /s) (a) (b) 0.1 0.12 0.14 Figura IV.4.2.17. Clasificación del régimen de flujo en una columna de burbujeo de 0.14m de diámetro interno mediante el estadístico S determinado utilizando los parámetros optimizados como: (a) promedio de la respuesta individual de los cuatro sensores, (b) respuesta global de los cuatro sensores. En la Figura IV.4.2.18 se muestran los resultados del estadístico S para el amplio rango de condiciones de operación donde se realizaron mediciones de fluctuaciones de presión. Se observa nuevamente que el estadístico S responde según lo esperado aumentando progresivamente a medida que aumenta la certeza de que se incrementan las diferencias en la hidrodinámica de las condiciones de operación con respecto a la referencia. Nuevamente se observa que ocurre una saturación en este efecto cuando las velocidades de gas son muy altas. En este conjunto de experiencias, se obtiene la tendencia esperada de S para todos los sensores en todas las condiciones. De modo que el hecho que en la Figura IV.4.2.16 (b), el sensor ubicado a 98cm diera una respuesta diferente a los otros tres sensores, no reflejaría necesariamente un comportamiento local del sistema, sino que podría tratarse de una medición puntual con una sensibilidad diferente. Esto puede ser atribuido a que el sensor más cercano a la interfase de la emulsión tiene una respuesta irregular en algunas condiciones debido a las heterogeneidades que son comunes en esta sección de la columna. 253 40 70 35 60 H = 38 cm 30 H = 68 cm 50 25 40 S S 20 30 15 20 10 10 5 0 0 -5 0 0.05 0.1 0.15 0.2 0 0.25 0.05 0.1 0.15 0.2 0.25 -10 ug (m /s) ug (m /s) 80 60 70 H = 83 cm H = 98 cm 50 60 40 50 30 S S 40 30 20 20 10 10 0 0 -10 0 0.05 0.1 0.15 ug (m /s) 0.2 0.25 0 0.05 0.1 0.15 0.2 0.25 -10 ug (m /s) Figura IV.4.2.18. Clasificación del régimen de flujo computando el estadístico S a partir de la respuesta independiente de los cuatro sensores, en una columna de burbujeo de 0.14m de diámetro interno, utilizando los parámetros optimizados, en un amplio rango de condiciones de operación. En la Figura IV.4.2.19 se observa el promedio de las señales individuales y el S global calculado a partir de las señales de los cuatro sensores para todas las condiciones estudiadas. Nuevamente se observa que cualitativamente las dos respuestas son similares, con leve diferencia en las condiciones próximas a la transición. También se observa una mayor sensibilidad del S global con respecto al promedio. 254 70 70 60 Promedio 50 50 40 40 S_global S 60 30 30 20 20 10 10 0 0 0 0.05 0.1 0.15 0.2 0 0.25 0.05 0.1 0.15 0.2 0.25 -10 -10 ug (m /s) ug (m /s) (a) (b) Figura IV.4.2.19. Clasificación del régimen de flujo en una columna de burbujeo de 0.14m de diámetro interno, para todo el intervalo de operación estudiado, determinando el estadístico S como: (a) promedio de la respuesta individual de los cuatro sensores, (b) respuesta global de los cuatro sensores. 255 IV.4.3. APLICACIÓN DEL TEST DE DIKS PARA PREDECIR UNA PERTURBACIÓN EN LA FLUIDODINÁMICA DE UNA COLUMNA DE BURBUJEO DEBIDO AL CAMBIO DEL CARÁCTER ESPUMANTE DEL LÍQUIDO. En las secciones IV.4.1 y IV.4.2 se analizó la capacidad del test de Diks para clasificar el régimen de flujo en lechos fluidizados trifásicos y columnas de burbujeo de distinto tamaño. En ambos casos se trataba de situaciones estacionarias, dado que no se estaban evaluando series temporales de un proceso que estuviera cambiando en el tiempo. En esta sección se propone estudiar un cambio dinámico, es decir, estudiar una perturbación de la dinámica del proceso con el tiempo. Particularmente, se analizó la respuesta del test de Diks cuando en un determinado momento cambia drásticamente el carácter espumante del líquido por adicción de un surfactante, mientras la columna de burbujeo opera en régimen heterogéneo. Se aplicó el test de Diks a series temporales de fluctuaciones de presión adquiridas en simultáneo con cuatro sensores, utilizando los parámetros optimizados para la clasificación de régimen de flujo (sección IV.4.2.2) y también los utilizados por Villa et al. (2003) (ver sección II.3.2.1). En la Figura IV.4.3.1 se muestra la respuesta local de los cuatro sensores al calcular el estadístico S con los parámetros utilizados por Villa et al. (2003) (m = 20; L = 50 y d = 0.5). Se evaluó la hidrodinámica del sistema cada dos minutos; es decir, se utilizaron series temporales de 48000 puntos, como lo habían hecho Villa et al. (2003). En la Figura IV.4.3.2 se muestra la respuesta local de los cuatro sensores al calcular el estadístico S con los parámetros determinados como óptimos para la clasificación de regímenes de flujo (m = 20; L = 33 y d = 1). Al comparar las dos figuras puede observarse que el hecho de cambiar los parámetros no modifica cualitativamente la respuesta de las mismas con referencia a la detección de la perturbación. En ambas figuras puede observarse que la detección de la presencia de un agente surfactante que cambia la hidrodinámica en el medio es inmediata. El surfactante fue adicionado en los últimos segundos del minuto 16, por el tope de la columna. Su efecto es detectado por el sensor ubicado a mayor altura al instante. Durante los dos minutos posteriores, los 256 sensores ubicados a lo largo de toda la columna detectan que ha habido un cambio en la hidrodinámica del sistema. Es muy útil analizar la respuesta local de cada uno de los sensores dado que dan información de cómo evoluciona el sistema en diferentes secciones de la columna a medida que se estabiliza luego de la brusca perturbación producida en la hidrodinámica por la adición del surfactante. 70 60 60 50 50 H = 67cm 40 40 30 S S H = 82cm 30 20 20 10 10 0 0 0 50 100 150 0 200 50 150 200 Tiem po (m inutos) Tiem po (m inutos) 50 45 45 H = 33cm 40 40 H = 18 cm 35 35 30 30 25 25 S S 100 -10 -10 20 20 15 15 10 10 5 5 0 0 0 50 100 Tiem po (m inutos) 150 200 -5 0 50 100 150 200 Tiem po (m inutos) Figura IV.4.3.1. Estadístico S en función del tiempo calculado a partir de las series temporales de fluctuaciones de presión medidas con cuatro sensores ubicados a distintas alturas en la columna de burbujeo. Parámetros según Villa et al. (2003): m = 20, L = 50 y d = 0.5. Se observa que los valores de S calculados con las series temporales medidas con el sensor ubicado a 82cm se mantienen estables a partir de que el cambio es detectado. Esto se debe a que ésta es la sección más afectada de la columna en cuanto al cambio físico que produce la adición de espuma. Antes de la adición de espuma, la 257 altura de la columna de agua era de 70cm estables más una zona turbulenta de entre 15 y 25cm, fluctuando así la altura total de la columna entre 85 y 95cm. Por lo tanto, antes de la adición de espuma el sensor ubicado a 82cm está en una zona límite (interfase), con mucha turbulencia. Cuando se adiciona el surfactante, la espuma se genera en forma inmediata y expande la emulsión. Con el tiempo dicha espuma se extiende a toda la columna como se observa en la Figura IV.4.3.3. 70 60 60 50 50 H = 67cm 40 40 S S 30 30 H = 82cm 20 20 10 10 0 0 0 50 100 150 0 200 50 100 150 200 -10 -10 Tiem po (m inutos) Tiem po (m inutos) 40 25 35 H = 33 cm H = 18 cm 20 30 25 15 S S 20 10 15 5 10 5 0 0 -5 0 0 50 100 Tiem po (m inutos) 150 200 50 100 150 200 -5 Tiem po (m inutos) Figura IV.4.3.2. Estadístico S en función del tiempo calculado a partir de las series temporales de fluctuaciones de presión determinadas con cuatro sensores ubicados a distintas alturas en la columna de burbujeo. Parámetros optimizados para la clasificación de regímenes de flujo: m = 20, L = 33, d = 1. En la Figura IV.4.3.4 puede observarse que la interfase de la emulsión no es definida y que la misma va cambiando con el tiempo. Se registró que la altura de la columna va bajando progresivamente desde 121cm (medidos a los 10 minutos de la adición de espuma) hasta una altura entre 90 y 95cm una hora más tarde, altura a la cual se estabilizó. 258 Los sensores ubicados a 67, 33 y 18cm detectan el cambio en la serie temporal en el minuto 17, también en forma casi inmediata. Con el tiempo, a medida que el sistema tiende a un nuevo estado estacionario los valores de S disminuyen. Esta disminución es más abrupta con el tiempo a medida que el sensor se encuentra más bajo en la columna. Figura IV.4.3.3. Foto de la columna de 0.19m de di una vez que la espuma se extiende a toda la columna. Figura IV.4.3.4. Foto de la parte superior de la columna (límite superior de la emulsión gas líquido) en presencia de espuma. 259 Estos resultados indicarían que es factible determinar en forma inmediata con fines de monitoreo la generación profusa de espuma en una columna de burbujeo aplicando el test de Diks a series temporales de fluctuaciones de presión. 260 CAPITULO V Conclusiones El alcance de esta tesis se divide en dos partes principales. Por un lado, el estudio de técnicas que permitan obtener información representativa y confiable de los fenómenos fluidodinámicos que tienen lugar en los sistemas multifásicos, a través de mediciones que no perturben el desarrollo de los mismos. En particular, este objetivo derivó en el desarrollo e implementación de dos técnicas no invasivas de estudio de flujos multifásicos de distinta complejidad en el Centro Atómico Constituyentes (CAC): densitometría de rayos gama y seguimiento de un trazador radiactivo para el estudio del movimiento de fases condensadas (Radioactive Particle Tracking). Como consecuencia de estos desarrollos una buena parte de esta tesis ha consistido en el exhaustivo análisis de ambas técnicas y en el estudio de la mejor forma de extraer información útil y representativa a partir de cada una de ellas. Además, se realizaron mediciones de fluctuaciones de presión con el objetivo de contar con mediciones de una técnica no invasiva más difundida y de más fácil y económica implementación a nivel industrial, si bien la información que provee es limitada. Por otro lado, se realizaron distintos análisis utilizando series temporales obtenidas a partir de las distintas técnicas no invasivas examinadas. El objetivo de dichos análisis fue el de establecer, clasificar o monitorear distintos estados dinámicos que se encuentran en diversos tipos de reactores multifásicos de interés industrial. Las principales conclusiones se exponen a continuación. 261 V.1. DENSITOMETRÍA En esta sección se desarrolló un método no invasivo y de fácil implementación para diagnosticar la transición de régimen de flujo de homogéneo a heterogéneo en una columna de burbujeo. El mismo se basa en el análisis de las series temporales del número de fotones proporcionadas por una fuente radiactiva externa ubicada cerca de la columna y detectada por 1 ó 2 detectores de centelleo posicionados en el lado opuesto del diámetro de la columna. Los detectores capturan las cuentas emitidas por la fuente que atraviesan la emulsión gas-líquido. La transición en el régimen de flujo es identificada a partir de un quiebre en la tendencia de los momentos de mayor orden calculados a partir de las series temporales, en particular, el tercer momento. Existen tres factores que afectan la sensibilidad del método: actividad y energía de la fuente radiactiva y espesor del medio multifásico. Dado un espesor, la energía de la fuente define el número de cuentas que atraviesan la columna para las dos condiciones monofásicas extremas, que en este caso son estancas (columna vacía y columna llena de agua con ug = 0m/s). Cualquier condición bifásica (gas - líquido) dinámica, con velocidad superficial de gas mayor que cero, es una situación intermedia que se resolverá con el método presentado dependiendo de cuán favorables resulten las condiciones establecidas por la actividad y la energía de la fuente para el espesor especificado. Si se incrementa el espesor para una fuente de alta energía el efecto es el de una mayor separación del promedio de las cuentas entre las dos condiciones extremas, lo cual se traduce en una mejor resolución de las condiciones dinámicas intermedias. En este caso, si la fuente es de muy baja energía, la alta atenuación del medio multifásico dispersará tanto la distribución de las cuentas que los estados hidrodinámicos no podrán distinguirse por más que los promedios de las cuentas para las condiciones extremas estén muy separados. De hecho, en el caso de los experimentos con americio, mayores distancias entre la fuente y el detector proporcionaron una respuesta más promediada y condujeron a que los estimadores diagnostiquen una transición de régimen de flujo a mayores velocidades de gas. 262 Por otra parte, las fuentes que emiten rayos gama de baja energía dan al método una mayor sensibilidad para detectar la transición de régimen de flujo si el espesor es chico. Las fuentes que emiten rayos gama de alta energía son mejores candidatas para equipos de mayor tamaño, aumentando suficientemente la actividad de las mismas. Las frecuencias de muestreo más bajas (10-20 Hz) aumentan la resolución del método y este efecto se vuelve más importante a medida que disminuye la actividad y aumenta la energía de la fuente emisora de rayos gama. V.2. RPT Se desarrolló e implementó un equipo de seguimiento de una partícula radiactiva comúnmente llamado “Radioactive Particle Tracking” (RPT) en el Centro Atómico Constituyentes (CAC) de la Comisión Nacional de Energía Atómica (CNEA). Se montó el sistema electrónico para el registro simultáneo de las cuentas de los fotones emitidos por los trazadores radiactivos por medio de un arreglo de entre 8 y 20 detectores de centelleo. Se estudiaron elementos radiactivos de distintas características así como diferentes técnicas de preparación de trazadores. Además, se estudiaron distintos algoritmos de reconstrucción y la aplicabilidad de cada uno. Con el objetivo de medir la calidad de la reconstrucción se realizaron calibraciones estáticas y dinámicas utilizando los distintos trazadores preparados y diferentes algoritmos de reconstrucción, así como también se estudió la incidencia de la configuración de los detectores en caso de contar con un número limitado de los mismos. Para los experimentos de calibración dinámica que permiten evaluar la calidad de la reconstrucción de la posición cuando la partícula está en movimiento, se diseñó un sistema de aire comprimido para imponer un movimiento conocido lineal ascendente y descendente en la dirección axial dentro del flujo multifásico. Además, se utilizaron diferentes técnicas para cuantificar el movimiento conocido impuesto por el pistón. 263 Por último, se realizó un experimento preliminar con un trazador de características similares a la del agua en una columna de burbujeo con el objetivo de analizar si el equipo implementado es capaz de aplicarse a un trazador en libre movimiento. Con los resultados de este experimento se ilustró parte del tipo de información que es factible obtener a partir de experimentos de RPT. V.2.1. EXPERIMENTOS DE CALIBRACIÓN CON FUENTE DE 46SC En esta sección se llevaron a cabo experimentos de calibración con el objetivo de evaluar la habilidad de la técnica de RPT para reproducir las velocidades instantáneas axiales en un medio bifásico utilizando 46 Sc como fuente radiactiva y reconstruyendo con un algoritmo fenomenológico que utiliza la técnica de Monte Carlo. Se recosntruyó el movimiento lineal ascendente y descendente a diferentes velocidades, para diferentes condiciones experimentales en régimen homogéneo y heterogéneo. Los resultados pusieron en evidencia que la técnica de RPT es capaz de reconstruir satisfactoriamente la velocidad media del movimiento para todas las velocidades impuestas. Los resultados también indican que la precisión en la estimación de la velocidad calculada por RPT para la reconstrucción de las velocidades medias reconstruidas no decrece para altas velocidades de gas; de hecho, permanece, prácticamente invariable para todas las condiciones examinadas y similares a la obtenida sin flujo de gas. Estos resultados indican que las velocidades estimadas a partir de los ascensos y descensos rápidos del trazador, reconstruidos por RPT durante prolongados períodos de seguimiento, son adecuadas, permitiendo inferir características asociadas al movimiento. 264 V.2.2. EXPERIMENTOS DE CALIBRACIÓN CON FUENTE DE 198AU En esta sección se realizaron experimentos análogos a los realizados con la fuente de 46 Sc, pero utilizando una fuente de 198 Au. Se compararon diferentes configuraciones de detectores y se discutió la factibilidad de utilización de cada uno de los algoritmos de reconstrucción disponibles según el caso práctico a resolver. Se estudió el efecto en la disposición de detectores para reconstruir posiciones de calibración estáticas adicionales al conjunto de posiciones de calibración. Se puso de manifiesto la importancia de encontrar la configuración óptima de detectores alrededor de la columna cuando se cuenta con un número limitado. Los resultados mostraron que es más importante disponer los detectores en forma eficiente que aumentar su número. Nuevamente se impuso un movimiento lineal ascendente y descendente a diferentes velocidades por medios neumáticos, para diferentes condiciones experimentales en régimen homogéneo y heterogéneo y se reconstruyó la posición axial del movimiento del pistón utilizando el algoritmo Cross Correlation. Se mejoraron las técnicas para cuantificar el movimiento impuesto por el pistón lográndose así la posibilidad de medir simultáneamente posiciones y velocidades instantáneas por dos técnicas diferentes. Esto permite, por primera vez cuantificar exactamente el error de la técnica en la información instantánea que provee y así poder optimizar las configuraciones que lo minimicen. Para todas las velocidades del pistón estudiadas en los diferentes regímenes de flujo la superposición de las trayectorias reconstruídas mediante la técnica de RPT coincidió de manera adecuada con la medida por otra técnica de menor error, poniendo de manifiesto la capacidad de la técnica para estudiar el movimiento de fases condensadas. Las velocidades instantáneas calculadas por diferenciación directa siguen las tendencias de las impuestas por el pistón. Sin embargo, y debido a las características estocásticas de los procesos involucrados el error en las velocidades instantáneas es significativo. 265 Los resultados de las secciones IV.2.1 y IV.2.2 ponen de manifiesto la conveniencia de utilizar una metodología de calibración frente a un movimiento conocido, con el objetivo de cuantificar y mapear las incertidumbres y determinar la influencia de las diferentes variables en el procedimiento. Es importante destacar cómo las decisiones que se toman en las distintas etapas hasta llegar a realizar un experimento de RPT, como ser: sistema de estudio, elección de la fase a estudiar, fuente radiactiva, número de detectores, disposición geométrica de los mismos, algoritmo de reconstrucción, etc., están asociadas muchas veces a los recursos y se vuelve conveniente evaluar la incerteza asociada. El hecho de fijar una de estas variables podría determinar el resto de las mismas y con ellas las incertidumbres generadas. Cuando se cuenta con un número limitado de detectores es altamente conveniente estudiar configuraciones óptimas, cuestión que se hace menos importante si la información fuese más redundante. Asimismo, es un factor limitante el número de posiciones de calibración que son posibles realizar con el método de calibración estática disponible. En nuestro caso contar con un número limitado de detectores y un sistema manual de calibración determinó el espectro de algoritmos de reconstrucción utilizables (Monte Carlo y Cross Correlation). En esta tesis se evaluaron las ventajas y desventajas de ambos. El algoritmo basado en la descripción geométrica del modelo y una simulación de Monte Carlo es un algoritmo que tiene la ventaja de que sus resultados son extrapolables y físicamente interpretables. Sin embargo, el algoritmo requiere un alto grado de detalle del sistema: geometría, tamaño de los detectores, energía de la fuente, desintegraciones por átomo, etc. Además, el algoritmo es tedioso y costoso computacionalmente a la hora de su utilización. El algoritmo Cross Correlation propuesto por Bhusarapu (2005) es un algoritmo empírico más dependiente de las posiciones de los detectores y el número de cuentas registradas por estos durante la calibración; no interesa en este caso el tamaño de los detectores ni las características de la fuente. Si bien este algoritmo puede volverse costoso en tiempo de cómputo cuando pretenden reconstruirse corridas muy largas, es sencillo y poco demandante para el operador a la hora de utilizarlo. Es importante resaltar la utilidad de un algoritmo de reconstrucción fenomenológico para la modelización de un sistema que se pretenda estudiar ya que el 266 mismo permitiría simular cambios de escala disminuyendo muchísimo los tiempos experimentales en equipos más grandes. Una buena modelización en un sistema a escala laboratorio permitiría simular el mismo caso en sistemas más grandes. Esto no sería posible de ninguna manera con algoritmos empíricos como Cross Correlation o cualquiera de los otros descriptos en la sección II.4.2 de la Revisión Bibliográfica. V.2.3. EXPERIMENTO DINÁMICO DE RPT En esta sección se realizó un experimento dinámico de RPT en la columna de burbujeo en una condición experimental correspondiente al régimen de flujo heterogéneo. Para ello se construyó un trazador con las características del agua, utilizando 198 Au como elemento radiactivo. Dado que se utilizó la configuración C de detectores, se empleó el algoritmo Cross Correlation para realizar la reconstrucción de la trayectoria de la partícula. Este algoritmo es incapaz de determinar adecuadamente posiciones axiales fuera de los límites donde están dispuestos los detectores y es un punto a mejorar del mismo. Se reconstruyó el movimiento del trazador y se ilustró parte de la información fluidodinámica que puede extraerse con esta técnica y que sirve para validar códigos de Fluidodinámica Computacional (CFD). V.2.4. EFECTO DE UTILIZAR UNA SOLA CALIBRACIÓN Los resultados de esta sección representan uno de los mayores avances de esta tesis. Los mismos desestiman el paradigma aceptado de que indefectiblemente la técnica de RPT necesita una calibración para cada condición operativa examinada, dejando a la misma fuera de aplicaciones donde se estudian perturbaciones del flujo como un cambio en el carácter espumante de un líquido. 267 Los resultados demuestran que en la columna de burbujeo implementada, operada en distintas condiciones de régimen de flujo (homogéneo y heterogéneo), los errores que se cometen en la reconstrucción del movimiento del trazador cuando se emplean datos de una calibración en condiciones de líquido estanco (sin circulación de gas) son del mismo orden que los obtenidos con datos de una calibración realizada en las mismas condiciones de flujo en las que se realiza el experimento. Cabe mencionar que una calibración realizada con una columna llena de agua representa la condición más extrema de atenuación del medio. En el caso de tener que estudiar condiciones de régimen de flujo muy heterogéneas donde la distribución de holp up es muy diferente a la condición de líquido estanco, los resultaron demostraron que utilizar una calibración realizada bajo el mismo régimen de flujo mejora la calidad de la reconstrucción y sigue permitiendo estudiar con RPT situaciones de cambios dinámicos sin tener que parar el experimento o realizar otra calibración. V.2.4.1. FUENTE 46SC En esta sección se puso de manifiesto que es factible obtener tanto reconstrucciones de posiciones estáticas y dinámicas a partir del promedio de las cuentas o cuentas instantáneas respectivamente utilizando una fuente de 46 Sc y el algoritmo de Monte Carlo utilizando una única calibración en condiciones estancas. La determinación de la velocidad media de los ascensos y descensos del pistón es comparable utilizando una calibración en la condición dinámica correspondiente o en la condición más extrema de atenuación del medio donde la distribución del hold up es constante. V.2.4.2. FUENTE 198AU En esta sección se demostró que es posible reconstruir posiciones estáticas y reproducir un movimiento dinámico impuesto a partir de las cuentas instantáneas 268 empleando 198 Au como fuente radiactiva y el algoritmo de reconstrucción Cross Correlation utilizando una sola calibración en condiciones estancas para dos configuraciones diferentes de detectores. Además, se pudieron reproducir velocidades instantáneas en diferentes condiciones de régimen homogéneo y heterogéneo con desviaciones comparables a las esperadas cuando se calcularon las velocidades instantáneas medidas con la columna llena de agua y ug = 0m/s. Estos resultados son aún más interesantes que los encontrados para el tratarse el 198 46 Sc por Au de una fuente de menor energía y por lo tanto de mayor interacción con el medio multifásico. V.3. DINÁMICA SIMBÓLICA Se aplicó la metodología de dinámica simbólica estática a dos tipos diferentes de series temporales. Esta técnica tiene especial importancia cuando se pretende caracterizar sistemas dinámicos no lineales donde es muy difícil o no se pretende modelar el sistema. En primer lugar se utilizó la técnica para inferir información del régimen de flujo a partir de series temporales de la posición axial de un trazador en un experimento de RPT en lechos fluidizados trifásicos. En segundo lugar, se aplicó un análisis similar a partir de información cruda de las cuentas de fotones de un trazador libre en una emulsión bifásica contabilizadas por detectores dispuestos adecuadamente para evaluar si era posible obtener información del movimiento de un trazador moviéndose libremente en un sistema multifásico sin tener que atravesar el engorroso procedimiento de reconstrucción de la posición. Naturalmente, el grado de detalle en la información obtenida es distinto pero en muchos casos es prácticamente útil. 269 V.3.1 APLICACIÓN DE DINÁMICA SIMBÓLICA A SERIES TEMPORALES DE UNA COORDENADA DE RPT Se extrajo información del comportamiento de un trazador sólido que se mueve libremente en un lecho fluidizado trifásico a partir del análisis de las trayectorias por simbolización estática y se postuló un indicador de régimen de flujo. Los símbolos, claramente muestran un quiebre en su tendencia con el aumento de la velocidad de gas luego que un cambio en el régimen de flujo ha ocurrido, y algunos de ellos tienden a un valor constante en el régimen heterogéneo. De todas maneras, sería deseable el análisis de una mayor cantidad de datos para establecer la robustez de la magnitud sugerida como indicador del régimen de flujo. V.3.2 APLICACIÓN DE DINÁMICA SIMBÓLICA A SERIES TEMPORALES DE CUENTAS DE FOTONES REGISTRADOS DURANTE UN EXPERIMENTO DE RPT EN UNA COLUMNA DE BURBUJEO Una metodología de dinámica simbólica fue utilizada para extraer información dinámica del comportamiento del líquido en una columna de burbujeo a partir de las series temporales de cuentas de fotones emitidas a partir de un trazador radiactivo que simula el movimiento del líquido y detectadas simultáneamente por cuatro detectores dispuestos en fila. Las series temporales se obtienen de los datos crudos del experimento sin necesidad de calibración ni reconstrucción de la trayectoria del trazador. Del análisis de los resultados se desprende que es posible obtener información útil y en forma extremadamente rápida mediante este análisis. El mismo permitió determinar el comportamiento dinámico del líquido de la misma manera que se lo podía observar en las series temporales de la coordenada axial de la reconstrucción del experimento de RPT. Este resultado tiene gran importancia debido a que, si bien no reemplaza la información que puede obtenerse por RPT, el método proporciona una idea del comportamiento dinámico del sistema así como una rápida estimación de velocidades 270 de fase. Asimismo, el método puede utilizarse como experimento preliminar para la calificación de la calidad del trazador que se utilizará en un experimento de RPT. El mismo permite estudiar si el trazador recorre bien toda la columna o permanece siempre en la misma sección indicando así una mala representación del comportamiento de la fase en estudio. V.4. TEST DE DIKS El test de Diks et al. (1996) ha sido aplicado en distintos sistemas multifásicos de interés industrial, para series temporales de distintas variables características y para el monitoreo estático y dinámico de distintos fenómenos. V.4.1. APLICACIÓN DEL TEST DE DIKS A SERIES TEMPORALES DE LA COORDENADA X DE UNA PARTÍCULA TRAZADORA DETERMINADA POR RPT EN LECHOS FLUIDIZADOS TRIFÁSICOS. CLASIFICACIÓN DE RÉGIMEN DE FLUJO. El estadístico S demostró ser una poderosa herramienta para el diagnóstico de régimen de flujo en lechos fluidizados trifásicos a partir de series temporales obtenidas en experimentos de RPT. El mismo fue capaz de clasificar satisfactoriamente el régimen de flujo para todas las condiciones estudiadas en tres situaciones independientes y utilizando dos unidades experimentales de RPT diferentes. El estadístico refleja satisfactoriamente diferencias entre atractores reconstruidos que corresponden a distintas condiciones fluidodinámicas. En particular, se pudo clasificar satisfactoriamente el regímen de flujo para varias velocidades de líquido y de gas, con mezclas de partículas de diferentes tamaños y en columnas de distinto tamaño. La selección de una referencia apropiada del estado fluidodinámico es de gran importancia. Debe elegirse como referencia un experimento que pertenezca a una 271 condición fluidodinámica estable y bien establecida para obtener resultados adecuados. El test arroja valores cercanos al límite (S = 3) para experimentos en condiciones cercanas a la transición de régimen de flujo. Para estas condiciones, diferentes períodos de la trayectoria del trazador pueden llevar a valores por encima y por debajo del valor límite del test. Naturalmente, experimentos cercanos a la transición no deben tomarse como estado fluidodinámico de referencia. V.4.2. APLICACIÓN DEL ESTADÍSTICO S PARA EL DIAGNÓSTICO DE RÉGIMEN DE FLUJO EN COLUMNAS DE BURBUJEO A PARTIR DE DATOS DE RESULTADOS DETERMINADOS RPT. VALIDACIÓN DE CON MEDICIONES DE FLUCTUACIONES DE PRESIÓN En esta sección se demostró que el estadístico S es una herramienta poderosa para comparar atractores que describen la fluidodinámica en columnas de burbujeo de distintos tamaños. La comparación puede realizarse para diagnosticar el régimen de flujo a partir del análisis de series temporales experimentales de la trayectoria de un trazador de líquido determinada por RPT o de fluctuaciones de presión. El estadístico S arrojó buenos resultados para ambas variables utilizando el mismo conjunto de parámetros óptimos. Este hecho valida el uso del test de Diks aplicado a series temporales de fluctuaciones de presión medidas en unidades industriales como una forma económica de detectar cambios en el régimen de flujo. Cuando se estudia el comportamiento de una columna de escala piloto o industrial, es importante monitorear la columna en diferentes ubicaciones con el objetivo de mejorar la robustez de la respuesta del test. Comparando los resultados obtenidos midiendo fluctuaciones de presión con los obtenidos por RPT, puede establecerse el conjunto de parámetros óptimos para la aplicación del test, el número de sensores de presión necesarios, y la mejor localización de los mimos para obtener buena clasificación del régimen de flujo en columnas de burbujeo. 272 Podemos concluir que el estadístico S fue capaz de clasificar el régimen de flujo en columnas de burbujeo de distinto tamaño, estudiando dos variables características distintas, tanto local como globalmente. V.4.3. APLICACIÓN DEL TEST DE DIKS PARA PREDECIR EL CAMBIO DEL CARÁCTER ESPUMANTE DEL LÍQUIDO EN COLUMNAS DE BURBUJEO. El test de Diks se aplicó para monitorear un cambio fluidodinámico inesperado en una columna de burbujeo midiendo fluctuaciones de presión. El objetivo era evaluar la robustez del método para identificar un cambio repentino en el carácter espumante del líquido provocado por la adición de un surfactante en una columna de burbujeo y estudiar la evolución del cambio a lo largo de la columna. Se demostró que el estadístico S es capaz de diagnosticar la presencia de la perturbación en forma inmediata e indicar la evolución de la misma con el tiempo hacia un nuevo estado fluidodinámico. 273 274 APÉNDICE A Descripción de algoritmos de reconstrucción de RPT utilizados Monte Carlo (Larachi et al., 1994) El algoritmo fue desarrollado por Larachi et al. (1994) para una configuración de 8 detectores de NaI(Tl) donde se tomaron 150 puntos de calibración. El sistema era un lecho fluidizado trifásico conformado por una columna de acrílico. El algoritmo considera que el número de cuentas medidas por cada uno de los detectores se determina según la ecuación II.4.2.1 para la cual debe evaluarse la eficiencia expresada por la ecuación II.4.2.2. Los factores que deben considerarse para calcular la eficiencia ε son: • • • El ángulo sólido Ω; La probabilidad fa = exp(-µReR(α, θ) µWeW(α, θ)) de no interacción de rayos gama emitidos dentro del Ω con el medio dentro del reactor y la pared del mismo; La probabilidad fd = 1- exp (-µDd(α, θ)) de interacción de los rayos gama a lo largo de la distancia d dentro del cristal del detector correspondiente. donde µR es el coeficiente de atenuación total del medio fluidizado para rayos gama de 1005 keV y e(α, θ) es el camino libre atravesado por los fotones en la dirección de muestreo determinada por los ángulos α y θ con respecto al detector. Larachi et al. (1994) modelaron los dos rayos gama del 46 Sc (cuyas energías de desintegración son 890 y 1120 keV) como dos rayos idénticos con una energía promedio de 1005 keV. µD es el coeficiente de atenuación lineal (excluyendo la dispersión coherente) del material del detector y d(α, θ) es la distancia efectiva recorrida en el cristal por un rayo gama no perturbado a lo largo de la dirección (α, θ) (ver esquema en la Figura II.4.2.6). 275 Para estimar la eficiencia total del detector, ε, dada una posición del trazador en el reactor, la integral de superficie (Ec. II.4.2.2) se evalúa muestreando varios miles de direcciones (α, θ) al azar. Esto implica seguir un gran número de historias o recorridos de los fotones una vez que fueron emitidos por la fuente hasta que son absorbidos por el detector. Los ángulos α y θ se expresan en un marco de referencia (O’,i’,j’,k’) relativo al detector, como puede verse en el esquema de la Figura II.4.2.6. Dado que no todas las direcciones (α, θ) son equivalentes, a cada dirección muestreada se le asigna un peso estadístico apropiado ω(α, θ). Con la hipótesis de emisión isotópica, los ángulos α y θ pueden muestrearse independientemente, por lo tanto ω(α, θ) = ζ(α)ζ(θ). Para cada dirección muestreada (α, θ), las probabilidades fD(α, θ) y fa(α, θ) deben ser determinadas simultáneamente. Finalmente, el valor promedio del producto ζ(α)ζ(θ) fD(α, θ)fa(α, θ), para todas las direcciones muestreadas, constituye un estimador de la eficiencia total: 1 N ε = ∑ ζ ( α )ζ ( θ ) f a ( α, θ ) f D ( α, θ ) N 1 (A.1) Para el cálculo de la distancia efectiva d(α, θ) en el detector, se deben determinar los puntos donde los fotones entran y dejan el detector: frente del disco, parte lateral, o por detrás. Larachi et al. (1994) utilizaron relaciones trigonométricas básicas para encontrar la distancia que un fotón puede viajar a través del reactor si se asume que no interactúan. Una vez que se elige una dirección (α, θ), se determinan los caminos eR(α, θ) y eW(α, θ) que el fotón debe atravesar en el reactor sin sufrir dispersión, calculando la intersección de un línea y un cilindro en el sistema de referencia del reactor (O,i,j,k). Para realizar esto, se transforman las coordenadas fuente - detector en el sistema (O’, i’, j’, k’) al sistema de referencia del reactor (O, i, j, k). Para calcular las probabilidades fD(α, θ) y fa(α, θ), se necesita una evaluación de los coeficientes de atenuación lineal del material del detector (µD), del material de la pared del reactor (µW) , y del medio denso dentro del reactor (µR). Como Larachi et al. (1994) utilizaron 46 Sc como radioisótopo (rayos gama de alta energía) solamente se requirió tener conocimiento sobre la radiación fotoeléctrica y 276 Compton para el NaI(Tl) y para la pared del material, para los cuales utilizaron dichos valores de la literatura (Avignone y Jeffreys 1981, Tsoufadinis, 1983). La incógnita remanente (µD) se obtiene por ajuste lineal de las cuentas medidas con las calculadas por la ecuación II.4.2.1 mediante la simulación de Monte Carlo. Los tiempos muertos de los detectores, τ, también se ajustan en el modelo y generalmente ajustan a valores despreciables muy próximos a cero. Las fracciones de fotopico f correspondientes a los isótopos son calculados a partir de correlaciones (Ozmutlu y Ortaovali, 1976; Cesana y Terrani, 1989), o medidas realizando un análisis de altura de los pulsos. Los cálculos de Monte Carlo se verifican comparando las cuentas estimadas para un dado detector con las cuentas medidas posicionando la fuente en un número conocido de posiciones en el reactor durante la calibración. Estas calibraciones permiten la verificación de los valores utilizados para la actividad de la fuente y el ajuste del valor utilizado para el coeficiente de atenuación lineal del contenido del reactor. Los valores óptimos de la actividad de la fuente R y el coeficiente de atenuación µR del contenido del reactor se encuentran por un ajuste de cuadrados mínimos. Luego, se genera computacionalmente un mapa de las cuentas de los rayos gama que cada detector hubiera medido para aproximadamente 20000 puntos dentro del volumen del reactor. Cada punto del mapa generado da las coordenadas tridimensionales del trazador y las cuentas de rayos gama correspondientes que cada detector hubiera acumulado. Una vez construido este mapa o grilla (lo denominaremos Diccionario en la sección de Resultados y Análisis) para cada condición experimental a partir de los datos de calibración, sólo queda el problema inverso de reconstruir la posición instantánea de la partícula a partir de las cuentas simultáneas registradas por todos los detectores utilizados durante un experimento. Larachi et al. (1994) utilizaron un ajuste de cuadrados mínimos para realizar la búsqueda de la mejor posición comparando las cuentas medidas con las cuentas obtenidas por la simulación de Monte Carlo para cada punto de la grilla y para cada detector. La función χ2 que se minimiza es: ⎛C − Cm, j ⎞ χ = ∑ ⎜ calc, j ⎟⎟ ⎜ Cm, j j=1 ⎝ ⎠ Nd 2 2 (A.2) 277 Donde Ccalc,j representa las cuentas calculadas para el detector j, Cm,j representa las cuentas medidas por el detector j y Nd es el número total de detectores (8 para Larachi et al. (1994)). Con el fin de mejorar la resolución, se continúa la búsqueda del óptimo alrededor de este primer punto identificado como “mejor punto de la grilla”. Para ello, se hace una corrección local del número de cuentas estimado que sólo considera la variación en la distancia al centro de cada detector. Algoritmo de búsqueda basado en la función de Correlación Cruzada, Cross Correlation (Bhusarapu, 2005) Este planteo combina un criterio de localización de la posición de la partícula basado en la función de correlación cruzada con un modelo semi-empírico que relaciona las cuentas adquiridas por cada uno de los detectores, provenientes de la partícula trazadora teniendo en cuenta la geometría y la absorción del medio. Cada posición de calibración se corresponde en forma unívoca con una serie única de cuentas adquiridas por los Nd detectores. Si consideramos las series de cuentas obtenidas en simultáneo por todos los detectores para una dada posición del trazador durante la calibración ( Ccalib ( i )i =d1 ), y otra serie de cuentas simultáneas de los Nd N detectores obtenidas durante un experimento de RPT en un instante determinado ( Crun ( j) j=d1 ), el intervalo de retraso igual a cero de la función de correlación cruzada N entre las dos series Ccalib ( i )i =d1 y Crun ( j) j=d1 provee un estimador de la concordancia entre N N las cuentas de los detectores para ambos casos. Cabe destacar que cuando el intervalo de retraso de la función de correlación cruzada es igual a cero, es la función de autocorrelación. El criterio de búsqueda del óptimo empleado por Bhusarapu (2005), se basa en que la función de correlación cruzada normalizada, dará un valor próximo a 1 (uno) cuando el intervalo de retraso es igual a cero si las dos series: Ccalib ( i )i =d1 y Crun ( j) j=d1 N N son muy similares. Cuando esto ocurra, la posición del trazador en ese instante será próxima a la posición de calibración correspondiente. Luego, la primera aproximación a la determinación de la posición del trazador surge de comparar las series de cuentas medidas por los detectores con las cuentas medidas durante la calibración. 278 La posición de la partícula trazadora durante una corrida debe ser cercana a esa posición conocida, perteneciente al conjunto de datos de calibración, que tiene un máximo en el intervalo de retraso igual a cero de la función de correlación cruzada entre las dos series normalizadas, dada por la ecuación: R run,calibk ( 0 ) = ∑ Nd i =1 Ccalib ( i ) Crun ( i ) Nd Nd ∑ C ( j ) ∑ C ( j) j=1 2 calib j=1 (A.3) 2 run Los valores de la función de correlación cruzada, Rrun,calibk (0) , son calculados a partir de las k posiciones de calibración. Por lo tanto, la posición más cercana conocida es identificada como la posición de calibración donde la función } da un pico. Esto nos da el mejor estimador de la posición más { R run,calibk ( 0 )k =calib 1 N cercana. Para mejorar la resolución en la posición, se realiza un segundo paso buscando alrededor de este “mejor estimador inicial” de la posición del trazador. En el segundo paso, todas las posiciones vecinas más cercanas en el mapa de calibración alrededor de esta posición, identificada como “mejor estimador inicial”, están ubicadas y forman parte de una superficie cerrada cuyo centro es la posición, identificada como “mejor estimador inicial”. Utilizando un modelo para estimar las cuentas, se refina la grilla dentro de esta superficie cerrada y se sigue luego un convergencia dado por: Rrun,calibk (0) =1. procedimiento similar de búsqueda en forma iterativa hasta que se alcanza el criterio de La estimación de las cuentas del fotopico se obtiene modelando la eficiencia total del detector, definida como la probabilidad de que los rayos gama emerjan del reactor sin dispersión y que interactúan descargando toda su energía en el detector. El modelo para estimar las cuentas medidas (C) está dado por: C= k1 exp ( −k 2 d x − k 3d y − k 4 d z ) (1 − exp ( −µ d k 5 ) ) d2 (A.4) donde dx, dy y dz son los componentes sobre los ejes cartesianos de la distancia entre alguna posición en el reactor y el centro del cristal del detector considerado; d es la distancia entre la posición del trazador y el centro del cristal del detector, µd es el coeficiente de atenuación para el material del detector y k1,2,3,4,5 son constantes. 279 El segundo paso provee un nuevo conjunto de calibración en un mejor nivel de refinamiento de la grilla. Los pasos uno y dos se repiten alternativamente hasta alcanzar el criterio de convergencia. En el modelo (Ec.(A.4)), el ángulo sólido comprendido entre el detector y cualquier posición, variando entre desplazamientos pequeños (en las esferas de los vecinos más cercanos) fue considerado como k1 , donde k1 corresponde al área que ve d2 el detector desde esa posición. Los términos exponenciales en las tres direcciones corresponden a la atenuación del medio entre la posición del trazador y el detector, y las constantes k2,3,4 corresponden a los coeficientes de atenuación de masa efectiva en las (1 − exp ( −µ k ) ) . tres direcciones. La probabilidad de interacción con el cristal del detector de los rayos gama, que emergen del sistema, se modela como d 5 Aquí, k5 corresponde al camino del rayo a lo largo del cristal, lo cual se asume como una constante dentro de la esfera de los vecinos más cercanos. Las constantes se determinan mediante un método de optimización dentro de la esfera de vecinos más cercanos. Para validar la calidad de la reconstrucción de este algoritmo en el sistema en estudio, nótese que si quisieran reconstruirse posiciones estáticas que fueron incluidas en el conjunto de las posiciones de calibración, la función de correlación cruzada daría 1 (uno) para esas posiciones y se volvería innecesario el segundo paso de refinamiento de la grilla de calibración dentro de la región de los vecinos más cercanos. Por lo tanto, las posiciones de calibración a ser predichas deben ser adicionales al conjunto de posiciones de calibración. El algoritmo Cross Correlation tiene algunos parámetros de ajuste. En esta tesis se utilizaron los mismos propuestos por Bhusarapu (2005) y se optimizó el criterio de convergencia a partir de los datos experimentales. Detalles sobre la implementación del algoritmo deben consultase en Bhusarapu (2005). 280 NOMENCLATURA ug velocidad superficial de gas uL velocidad superficial de líquido ρ densidad γ gama vZ velocidad de la coordenada z d.i. diámetro interno GB Glass Beads H altura con respecto a una referencia FDP Función de Densidad de Probabilidades 281 282 BIBLIOGRAFÍA • Avignone F.T., Jeffreys J.A. (1981) Empirical Polynomials for Computing Gamma Ray Interaction Cross Sections and Coefficients in Ge and NaI(Tl). Nuclear Instruments and Methods 179 159–162. • Bai D., Issangya A. S., Grace J. R. (1999) Characteristics of Gas-Fluidized Beds in Different Flow Regimes. Industrial & Engineering Chemistry Research 38, 3, 803–811 • Bai D., Shibuya E., Nakagawa N., Kato K. (1997) Fractal Characteristics of Gas–Solids Flow in a Circulating Fluidized Bed. Powder Technology, 90, 3, 205–212 • Beltran F. J., Encinar J. M., Garcia Araya, J. F. (1995). Modelling Industrial Wastewater Ozonation in Bubble Contactors. 2. Scale-up from Bench to Pilot Plant. Ozone Science and Engineering 17, 379–398 • Bhusarapu S., Cassanello M. C., Al-Dahhan M., Dudukovic M. P., Trujillo S., O’Hern T. J. (2006) Dynamical Features of the Solid Motion in Gas-Solid Risers. International Journal of Multiphase Flow 33 164–181 • Bhusarapu, P. Fongarland, M. H. Al-Dahhan and M. P. Duduković, (2004) Measurement of Overall Solids Mass Flux in a Gas-Solid Circulating Fluidized Bed, S. Powder Technology 148, 2-3, 155–168 • Bhusarapu, S. (2005) Solids Flow Mapping in Gas-Solid Risers, D.Sc. Thesis, Washington University, St. Louis, Missouri, USA. • Blenke H. (1979) Loops Reactors. Adv. in Biochemical Engineering 13, 121 • Borlai O., Hodany L., Blickle T. (1967) Investigation into the Mixing in Fluidized Beds. Proceedings of International Symposium of Fluidization, ed. A.A.H. Drinkenburg, Amsterdam, Netherlands University Press, pp. 433–441 • Boyes A. P., Raymahasay S., Sulidis A. T., Winterbottom J. M. (1995) Oxidation of Aqueous Organic Pollutants in Industrial Waste Water by Heterogeneous Photocatalysis Using a Concurrent Downflow Bubble Column Contactor (CDC). Water Pollution III: Modell., Meas. Predict., 3rd, Eds. 283 • Wrobel, L. C., and Latinopoulos, P., Pub. Computational Mechanics Publications, Southhampton, UK • Briens L.A., Briens C.L. (2002) Cycle Detection and Characterization in Chemical Engineering, AIChE J., 48, 970–980 • Briens L.A., Ellis N. (2005) Hydrodynamics of Three-Phase Fluidized Bed Systems Examined by Statistical, Fractal, Chaos and Wavelet Analysis Methods. Chemical Engineering Science, 60, 6094–6106 • Broomhead D.S., King G.P. (1986) Extracting Qualitative Dynamics from Experimental Data. Physica D 20, 217–236 • Bukur D.B. Daly J.G. (1987) Gas Hold Up in Bubble Columns for Fisher Tropsch Synthesis. Chemical Engineering Science 42, 2967, 9 • Bukur D.B., Daly J.G. (1987) Gas Holdup in Bubble Columns for Fischer– Tropsch Synthesis. Chemical Engineering Science 42, 2967–2969 • Bukur D.B., Daly J.G., Snehal A.P. (1996) Application of γ-ray Attenuation for Measurement of Gas Holdups and Flow Regime Transitions in Bubble Columns. Industrial & Engineering Chemistry Research 35, 70–80 • Cassanello M., Larachi F., Chaouki J. (2004) Dynamical Features Extracted from the Solids Circulation Trajectories in Gas – Liquid – Solid Fluidized Bed. Proceedings of Tracer 3, Conference on Tracers and Tracing Methods, Ciechocinek, Poland, pp. 68–73 • Cassanello M., Larachi F., Kemoun, A., Al-Dahhan, M. H., Dudukovic, M. P., (2001) Inferring liquid chaotic dynamics in bubble columns using CARPT. Chemical Engineering Science 56, 6125–6134 • Cassanello M., Larachi F., Marie M., Chaouki J., Guy C. (1995) Experimental Characterization of the Solid Phase Chaotic Dynamics in Three Phase Fluidization. Industrial & Engineering Chemistry Research 34, 2971–2980 • Cassanello, M.C., Larachi, F., Legros, R., Chaouki, J. (1999) Solid Dynamics from Experimental Trajectory Time-Series of a Single Particle Motion in GasSpouted Beds. Chemical Engineering Science 54, 2545–2554 • Cazelles B. (2004) Symbolic Dynamics for Identifying Similarity Between Rhythms of Ecological Time Series, Ecol. Lett. 7, 755–763 284 • Cesana A., Terrani M. (1989) An Empirical Method for Peak to Total Ratio Computation of a Gamma Ray Detector. Nuclear Instruments and Methods A128, 172–175 • Chaouki J., Larachi F., Dudukovic M.P. (1997b) Non-Invasive Tomographic and Velocimetric Monitoring of Multiphase Flows. Industrial & Engineering Chemistry Research 36, 4476–4503 • Chaouki, J., Larachi, F., Dudukovic, M.P. (Eds.) (1997) Non-Invasive Monitoring of Multiphase Flows. Elsevier, Amsterdam. • Chaplin G., Pugley T. (2005) Application of Electrical Capacitance Tomography to the Fluidized Bed Drying of Farmaceutical Granule. Chemical Engineering Science 60, 7022–7033 • Chaplin G., Pugsley T., Winters C. (2004) Application of Chaos Analysis to Pressure Fluctuation Data from a Fluidized Bed Dryer Containing Pharmaceutical Granule. Powder Technology 142, 110–120 • Chaplin G., Pugsley T., Winters C. (2005a) The S statistic as an Early Warning of Entrainment in a Fluidized Bed Dryer Containing Pharmaceutical Granule. Powder Technology 149, 148–156 • Chaplin G., Pugsley T., Winters C. (2005b) Monitoring the Fluidized Bed Granulation Process Based on S Statistic Analysis of a Pressure Time Series. AAPS Pharm. Sci. Tech. 6, 2, article 29. • Chaplin, G. (2005) Monitoring fluidized bed dryer hydrodynamics using pressure fluctuations and electrical capacitance tomography. Ph.D. Thesis, University of Saskatchewan, Canada. • Chen J., Rados N., Al-Dahhan M.H., Dudukovic M.P., Nguyen D., Parimi K. (2001) Particle Motion in Packed/ Ebullated Beds by CT and CARPT. AIChE J. 47, 994–1004 • Chen J.; Li F.; Degaleesan S.; Gupta P.; Al-Dahhan M.; Dudukovic M. P.; Toseland B. (1999) Fluid Dynamic Parameters in Bubble Columns with Internals. Chemical Engineering Science 54, 2187. • Chen M.M., Chao B.T., Liljegren J. (1983) The Effect of Bed Internals on the Solids Velocity Distribution in Gas Fluidized Beds. Fluidization IV, eds. D. Kunii and R. Toei, Engineering Foundation, New York, pp. 203–210 285 • Cheng Z., Zheng C., Feng Y., Hofmann H., (1995) Distributions of Flow Regimes and Phase Holdups in Three Phase Fluidized Beds. Chemical Engineering Science 50, 2153–2159 • Couderc J.P (1985) Incipient Fluidization and Particulate Systems. In Fluidization edited by J.F. Davidson, R. Clift and D. Harrison, Academic Press. • Daw C. S., Lawkins W. F., Downing D. J., Clapp N. E. (1990) Chaotic Characteristics of a Complex Gas-Solids Flow. Physical Review A 41, 1179– 1181 • Daw C.S., Finney C.E.A.,. Tracy E.R. (2003) A Review of Symbolic Analysis of Experimental Data. Rev. Sci. Instrum. 74, 915–932 • Deckwer W.D. (1992) Bubble Column Reactors. John Wiley & Sons, Ltd., England. • Deckwer W.D., Louisi Y., Zaidi A., Ralek M. (1980) Hydrodynamic Properties of the Fisher–Tropsch Slurry Process. Ind Eng Chem Process Des Dev 19, 699– 708 • Degaleesan S., (1997) Fluid Dynamic Measurements and Modeling of Liquid Mixing in Bubble Columns, D.Sc. Thesis, Washington University, St. Louis, Missouri, USA. • Degaleesan S., Dudukovic M., Pan Y. (2001) Fluid Mechanics and Transport Phenomenon. Experimental Study of Gas - Induced Liquid - Flow Structures in Bubble Columns. AIChE J. 47, 1913–1931 • Degaleesan S.; Dudukovic M. P.; Pan Y. (2002) Application of Wavelet Filtering to the Radioactive Particle Tracking Technique. Flow Meas. Instrum. 13, 31 • Degaleesan S.; Roy S.; Kumar S. B.; Dudukovic M. P. (1996) Liquid Mixing Based on Convection and Turbulent Dispersion in Bubble Columns. Chemical Engineering Science 51, 1967. • Devanathan N. (1991) Investigation of Liquid Hydrodynamics in Bubble Columns via Computer-Automated Radioactive Particle Tracking (CARPT), D.Sc. Thesis, Washington University, St. Louis, Missouri, USA. 286 • Devanathan N., Moslemian D., Dudukovic M. P., (1990) Flow Mapping in Bubble Columns Using CARPT. Chemical Engineering Science 45, 2285–2291 • Diesterwerg G., Fuhr H., Reher P. (1978) Die Bayer – Turmbiologie. Industrieabwasser, 7. • Diks C., van Zwet W.R., Takens F., DeGoede J. (1996). Detecting Differences • Between Delay Vector Distributions. Physical Review E 53, 2169–2176 Dudukovic M.P. (2010) Reaction Engineering: Status and Future Challenges. Chemical Engineering Science 65, 3–11 • Dudukovic M.P., Larachi F., Mills P. (2002) Multiphase Catalytic Reactors: a Perspective on Current Knowledge and Future Trends. Catalysis Reviews 44, 123–246 • Ermakova A., Ziganskin G.K., Slinlko M.G. (1970) Hydrodynamics of a Gas – Liquid Reactor with a Fluidized Bed of Solid Matter. Theor. Found. Chem. Engng. 4, 84–89 • Fan L.S. (1989) Gas – Liquid – Solid Fluidization Engineering. Butterworth Publishers, Boston, EEUU. • Fan L.S., Satija S., Wisecarver K. (1986) Pressure fluctuation measurements and flow regime transitions in gas – liquid - solid fluidized beds. AICHE Journal, 32, 338–340 • Fan L.S., Yang G.Q., Lee D.J., Tsuchiya K., Luo X. (1999) Some Aspects of High-Pressure Phenomena of Bubbles in Liquids and Liquid – Solid Suspensions. Chemical Engineering Science 54, 4681–4709 • Farmer J.D., Ott E., Yorke J.A. (1983) The Dimension of Chaotic Attractors. Physica D 9, 153–180 • Fernandes R.C., Semiat R., Dukler A.E. (1983) Hydrodynamic Model for Gas Liquid Slug Flow in Vertical Tubes. AICHE Journal 29, 981–989 • Finney C.E.A., Nguyen K., Daw C.S., Halow J.S. (1998) Symbol Sequence Satistics for Monitoring Fluidization. Proceedings of the 1998 International Mechanical Engineering Congress & Exposition (ASME), Anaheim, CA, USA, pp. 405–411 287 • Fregapane G., Rubio-Fernández H., Nieto J., Salvador M. D. (1999) Wine Vinegar Production Using a Noncommercial 100 Litre Bubble Column Reactor Equipped with a Novel Type of Dynamic Sparger. Biotechnology and Bioengineering 63, 141. • Gianetto A., Silveston P.L. (1986) Multiphase Chemical Reactors. Hemisphere Publishing Corporation, Washington, EEUU. • Godelle J., Letellier C. (2000) Symbolic Sequence Statistical Analysis for Free Liquid Jets. Phys. Rev. E 62, 7973–7981 • Godfroy L., Larachi F., Chaouki J. (1999) Position and Velocity of a Large Particle in a Gas/Solid Riser Using the Radioactive Particle Tracking Technique. The Canadian Journa.of Chemical Engineering 77. • Godfroy L., Larachi F., Kennedy G., Grandjean B.P.A., Chaouki, J. (1997) Online Flow Visualization in Multiphase Reactors Using Neural Networks. Appl. Radiat. Isotop. 48, 225–235 • Grassberger P. (1986) Estimating the Fractal Dimensions and Entropies of Strange Attractors. In Chaos, Holden, A.V., Ed., Princeton University Press, Princeton, NJ. • Grassberger P., Procaccia I. (1983a) Measuring Strangeness of Strange Attractors. Physica D 9, 189–208 • Grassberger P., Procaccia I. (1983b) Estimation of the Kolmogorov Entropy from a Chaotic Signal. Phys. Rev. A 28, 2591–2593 • Griffith P., Wallis G.B. (1961) Two Phase Slug Flow. Journal of Heat Transfer 83, 307–320 • Gupta P., (2002) Churn - Turbulent Bubble Columns: Experiments and Modeling. D. Sc. Thesis, Washington University, St. Louis, Missouri, USA. • Hamilton J.D (1994) Time Series Analysis. Princeton University Press, Princeton, NJ. • Hasan A.R., Kabir C.S. (1992) Two Phase Flow in Vertical and Inclined Annuli. International Journal of Multiphase Flow 18, 279–293 • Henriksen H.K., Ostergaard K. (1974) On the Mechanism of Break Up of Large Bubble in Liquids and Three Phase Fluidized Beds. Chemical Engineering Science 29, 626–629 288 • Hilborn R.C. (1994) Chaos and Non Linear Dynamics. An Introduction for Scientists and Engineers. Oxford University Press, New York. • Hilborn, R.C. (2000) Chaos and Non Linear Dynamics. An Introduction for Scientists and Engineers. Oxford University Press, New York, 2nd Edition. • Hsiaotao T. B. (2007) A Critical Review of the Complex Pressure Fluctuation Phemomenon of Gas – Solids Fluidized Beds. Chemical Engineering Science 62, 13, 3473–3493 • Hyndman CL, Larachi F, Guy C. (1997) Understanding Gas - Phase Hydrodynamics in Bubble Columns: a Convective Model Based on Kinetic Theory. Chemical Engineering Science 52, 63–77 • Ji H., Ohara H., Kuramoto K., Tsutsumi A., Yoshida K., Hirama T. (2000) Nonlinear Dynamics of Gas - Solid Circulating Fluidized Bed System. Chemical Engineering Science 55, 2, 403–410 • Jin H., Yang S., Guo Z., He G., Tong Z. (2005) The Axial Distribution of Holdups in an Industrial - Scale Bubble Column with Evaluated Pressure Using γ-ray Attenuation Approach. Chemical Engineering Journal 115, 45–50 • Jones O.C., Zuber N. (1975) The Interrelation Between Void Fraction Fluctuations and Flow Patterns in Two Phase Flow. International Journal of Multiphase Flow 2, 273–306 • Kantarci N., Borak F., Ulgen K.O. (2005) Bubble Columns Reactors, Review. Process Biochemistry 40, 2263–2283 • Kantz H., Schreiber T. (1997) Nonlinear Time Series Analysis. Cambridge University Press, Cambridge. • Karamavruc A.I., Clark N.N. (1997) Local Differential Pressure Analysis in a Slugging Bed Using Deterministic Chaos Theory. Chemical Engineering Science 52, 3, 357–370 • Kikuchi R., A. Tsutsumi, K. Yoshida, (1996) Fractal Aspect of Hydrodynamics in a Three - Phase Fluidized Bed. Chemical Engineering Science 51, 2865–2870 • Knoll G.F. (1989) Radiation Detection and Measurement. John Wiley & Sons, 2nd Edition, EEUU. 289 • Kondukov N.B., Kornilaev A.N., Skachko I.M., Akhromenkov A.A., Kruglov A.S. (1964) An Investigation of the Parameters of Moving Particles in a Fluidized Bed by a Radioisotopic Method. Int. Chem. Eng. 4, 43–47 • Krishna R., De Stewart J.W.A., Ellenberger J., Martina G.B., Maretto C. (1997) Gas Hold Up in Slurry Bubble Columns: Effect of Column Diameter and Slurry Concentrations. AICHE Journal 43, 311–316 • Krishna R., De Stewart J.W.A., Hennephof D.D., Ellenberger J., Hoefsloot H.C.J. (1994) Influence of Increased Gas Density on Hydrodynamics of Bubble Column Reactors. AICHE Journal 40, 1129. • Larachi, F., Cassanello, M., Chaouki, J., Guy, C., (1996) Flow Structure of the Solids in a Three-Dimensional Gas-Liquid-Solid Fluidized Bed. AIChE Journal 42, 2439–2452 • Larachi, F., Kennedy, G., Chaouki, J., (1994) A γ-Ray Detection System for 3D Particle Tracking in Multiphase Reactors. Nuclear Intruments & Methods A338, 568–576 • Lee D.H., Macchi A., Grace J.R., Epstein N. (2001) Fluid Maldistribution Effects on Phase Hold Ups in Three - Phase Fluidized Beds. Chemical Engineering Science 56, 6031–6038 • Lee J.C., Sherrard A.J., Buckley P.S. (1974) Optimum Particle Size in Three Phase Fluidized Bed Reactors. Fluidization and its Applications, ed. H. Angelino, 407 – 416, Cepadues – Editions, Toulouse. • Letzel H.M., Shouten J.C., van den Bleek C.M., Krishna R. (1997) Influence of Elevated Pressure on the Stability of Bubbly Flows. Chemical Engineering Science 52, 3733–3739 • Limtrakul S.; Chen J.; Ramachandran P. A.; Dudukovic M. P. (2005) Solids Motion and Hold Up Profile in Liquid Fluidized Beds. Chemical Engineering Science 60, 1889. • Limtrakul, S. (1996) Hydrodynamics of Liquid Fluidized Beds and Gas – Liquid Fluidized Beds. D.Sc. Thesis, Washington University, St. Louis, MO, USA. • Lin J.S., Chen M.M., Chao B.T. (1985) A Novel Radioactive Particle Tracking Facility for Measurement of Solids Motion in Gas Fluidized Beds. AICHE Journal 31, 465–473 290 • Lin T.J., Juang R.C., Chen Y.C., Chen C.C. (2001) Predictions of Flow Regime Transitions in a Bubble Column by Chaotic Time Series Analysis of Pressure Fluctuation Signals. Chemical Engineering Science 56, 1057–1065 • Luewisuthichat W., A. Tsutsumi, K. Yoshida (1995) Fractal Analysis of Particle Trajectories in Three - Phase Systems. Trans. IChemE 73, 222–227 • Mandelbrot B.B. (1982) The Fractal Geometry of Nature. W.H. Freeman and Company, New York. • Maretto C., Krishna R. (2001) Design and Optimization of a Multi - Stage Bubble Column Slurry Reactor for Fischer-Tropsch Synthesis. Catalysis Today 66, 241–248 • Mena P.C., Ruzicka M.C., Rocha F.A., Teixeira J.A., Drahoˇs J. (2005) Effect of Solids on Homogeneous – Heterogeneous Flow Regime Transition in Bubble Columns. Chemical Engineering Science 60, 6013–6026 • Mittoni L.S., Schwarz M.P., La Nauze R.D. (1995) Deterministic Chaos in the Gas Inlet Pressure of Gas – Liquid Bubbling Systems. Physics of Fluids, 7, 891– 893 • Moenes L., De Donder J., Lin X.L., De Corte F., De Wispelaere A., Simonits A., Hoste J. (1981) Calculation of the Absolute Peak Efficiency of Gamma Ray Detectors for Different Counting Geometries. Nuclear Instruments and Methods 187, 451–472 • Moon F.C. (1992) Chaotic and Fractal Dynamics. An Introduction for Applied Scientists and Engineers. John Wiley & Sons, Inc., New York. • Moslemian D., Chen M.M., Chao B.T. (1989) Experimental and Numerical Investigations of Solids Mixing in a Gas – Solid Fluidized Bed. Particulate Science Technology 7, 335–355 • Mostoufi, N., Chaouki, J., (2004) Flow structure of the solids in gas–solid fluidized beds. Chemical Engineering Science 59, 4217–4227 • Mudde, R.F., Harteveld, W.K., van den Akker, H.E.A., van den Hagen, T.H.J.J., van Dam, H. (1999) Gamma Radiation Densitometry for Studying the Dynamics of Fluidized Beds. Chemical Engineering Science 54, 2047–2054 291 • Mukherjee R.N., Bhattacharya P., Taraphdar D.K. (1974) Studies on the Dynamics of Three Phase Fluidization. Fluidization and its Applications, ed. H. Angelino, Cepadues Editions, Toulousse. • Muyorama K., Fan L.S (1985) Fundamentals of Gas Liquid Solid Fluidization. AICHE Journal 31, 1–33 • Muyorama K., Hashimoto K., Kawabata T. (1978) Axial Liquid Mixing in Three Phase Fluidized Beds. Kagaku Kogaku Ronbunshu 4, 622–628 (en japonés). • Nacef S. (1991) Hydrodynamique des lits fluidis´es gaz-liquide-solide. Effets du distributeur et de la nature du liquide. Ph.D. Dissertation, Institut National Polytechnique de Lorraine, Nancy, France. • Nacef S., Poncin S., Wild G. (1996) Onset of Fluidisation and Flow Regimes in Gas – Liquid – Solid Fluidisation: Influence of the Coalescense Behavior of the Liquid. Fluidization VIII, eds J.F. Large and C.Laguerie, Engineering Foundation, New York. • Nacef S., Wild G., Laurent A. (1992) Scale Effects in Gas – Liquid – Solid Fluidization. International Chemical Engineering, 32, 51–61 • Nguyen K., Daw C.S., Chakka P. Cheng M., Bruns D.D., Finney C.E.A., Kennell M.B. (1996) Spatio Temporal Dynamics in a Train of Rising Bubbles. The Chemical Engineering Journal and the Biochemical Engineering Journal, 64, 191–197 • Nijenhuis J., Korbee R. Lensselink J., van Ommen J.R. (2007) A Method for Agglomeration Detection and Control in Full Scale Biomass Fired Fluidized Beds. Chemical Engineering Science 62, 644–654 • Ong, B. (2003) Experimental Investigation of Bubble Column Hydrodynamics Effect Of Elevated Pressure And Superficial Gas Velocity. D.Sc. Thesis; Washington University in St. Louis: St. Louis, MO. • Ostergaard K. (1971) Three Phase Fluidization. In Fluidization, eds. J.F. Davidson and D. Harrison. Academic Press, London. • Ozmutlu C., Ortaovali A.Z. (1976) Calculation of Total and Full Energy Peak Efficiencies of Ge(Li) and NaI(Tl) Detectors by Introducing then Mean Chord Length. Nuclear Instruments and Methods 133, 149–155 292 • Pukelsheim F. (1994) The Three Sigma Rule. The American Statician 48, 88–91 • Rados N. (2003) Slurry Bubble Column Hydrodynamics: Experimentation and Modeling. D.Sc., Thesis, Washington University, Saint Louis, Missouri, USA. • Rados N., Shaikh A., Al-Dahhan M. (2005) Solids Flow Mapping in a High Pressure Slurry Bubble Column. Chemical Engineering Science 60, 6067. • Rammohan A. (2002) Characterization of Single and Multiphase Flows in Stirred Tank Reactors. D.Sc. Thesis, Washington University, St. Louis, USA. • Rammohan A., Kemoun A., Al-Dahhan M. H., Dudukovic M. P., Larachi, F. (2001). CARPT Dynamic Bias Studies: Evaluation of Accuracy of Position and Velocity Measurements. Recents Prog. Genie Procedes, 15 (79, Tracers and Tracing Methods) 59. • Roy S. (2000) Quantification of Two - Phase Flows in Liquid - Solid Riser. D.Sc. Thesis, Washington University, Saint Louis, Missouri. • Ruzicka M.C., Drahos J, Zahradnik J., Thomas N.H. (1997) Intermittent Transition from Bubbling to Jetting Regime in Gas – Liquid Two Phase Flows. International Journal of Multiphase Flow 23, 671–682 • Sanaei S., Mostoufi N., Radmanesh R., Sotudeh-Gharebagh R., Guy C.,Chaouki J. (2010) Hydrodynamic Characteristics of Gas-Solid Fluidization at High Temperature. Canadian Journal of Chemical Engineering 88, 1–11 • Sannaes B.H. (1997) Solids Movement and Concentration Profiles in Column Slurry Reactors. Dr. Ing. Thesis, Norwegian University of Science and Technology, Norway. • Schugerl K., Oels U., Lucke J. (1977) Bubble Columns Bioreactors. Adv. Biochemical Engineering 7, 1–84 • Schumpe A., Grund G. (1986) The Gas Disengagement Technique for Studying Gas Holdup Structure in Bubble Columns. Canadian Journal of Chemical Engineering 64, 891–896 • Shaikh A., Al Dahhan M.H. (2007) A Review on Flow Regime Transition in Bubble Columns. International Journal of Chemical Reactor Engineering 5, R1. 293 • Shaikh A., Al-Dahhan M. (2010) A New Methodology for Hydrodynamic Similarity in Bubble Columns. Canadian Journal of Chemical Engineering 88, 503–517 • Sivakumar V., Senthilkumar K., Akilamudhan P. (2008) Prediction of Liquid Holdup and Solid Holdup in Three-phase Fluidized Bed: Air/Newtonian and Non - Newtonian Liquid Systems. Chemical & Biochemical Engineering Quarterly 22, 401–410 • Song G.H., Bavarian F., Fan L.S. (1989) Hydrodynamics of Three Phase Fluidized Bed Containing Cylindrical Hydrotreating Catalysts. Canadian Journal of Chemical Engineering 67, 265–275 • Stahl P., von Rohr P. R. (2004) On the Accuracy of Void Fraction Measurements by Single Beam Gamma Densitometry for Gas–Liquid Two-Phase Flows in Pipes. Experimental Thermal and Fluid Science 28, 533–544 • Stienstra G., Nijenhuis J., Kroezen T., van den Bleek C., van Ommen J. (2005) Monitoring Slurry Loop Reactors for Early Detection of Hydrodynamic Instabilities. Chemical Engineering and Processing 44, 959–968 • Stringer, J. (1989) Is a Fluidized Bed a Chaotic Dynamic System? Proc. 10th. International Conference on Fluidized Bed Combustion 1, 265–272 • Sum J, Chen M.M., Chao B.T. (1988) On the Fluctuation Motions due to Surface Waves in Gas Fluidized Beds. Proceedings of the 1st World Congress of Experimental Heat Transfer, Fluid Mechanics and Thermodynamics, eds. R.K.Shah, E.N. Ganic and K.T. Yang, Elsevier Science Publishing, 1310–1328 • Taitel Y., Barnea D., Dukler A.E. (1980) Modeling Flow Pattern Transitions for Steady Upward Gas – Liquid Flow in Vertical Tubes. AICHE Journal 26, 345– 354 • Takens, F., (1981) Lecture Notes in Mathematics, Dynamical Systems and Turbulence, 898. Springer, Berlin, Germany. • Thorat B.N., Joshi J.B. (2004) Regime Transition in Bubble Columns: Experimental and Predictions. Exp Therm Fluid Sci 28, 423–30 • Tjugum S. A., Frieling J., Johansen G. A. (2002) A compact Low Energy Multibeam Gamma Ray Densitometer for Pipe - Flow Measurements. Nuclear 294 • Instruments and Methods in Physics Research Section B: Beam Interactions with Materials and Atoms 197, 301–309 • Tsoulfanidis N. (1983) Measurement and Detection of Radiation. Mc Graw Hill Series in Nuclear Engineering. • Tsutsumi A., Kikuchi R. (2000) Design and Scale Up Methodology for Multiphase Reactors Based on Non Linear Dynamics. Applied Energy 67, 195– 219 • Upadhyay R.K., Roy S. (2010) Investigation of Hydrodynamics of Binary Fluidized Beds via Radioactive Particle Tracking and Dual-Source Densitometry. Canadian Journal of Chemical Engineering 88, 601–610 • van den Bleek C.M., Schouten J. (1993a) Deterministic Chaos: a New Tool in Fluidized Bed Design and Operation. Chemical Engineering Journal 53, 75–87 • van den Bleek C.M., Schouten J. (1993b) Can Deterministic Chaos Create Order in Fluidized Bed Scale Up? Chemical Engineering Science 48, 2367–2373 • van Ommen J.R, Schouten J.C., van der Stappen M.L.M , van den Bleek C.M. (1999) Response Characteristics of Probe Transducer Systems for Pressure Measurements in Gas - Solid Fluidized Beds: How to Prevent Pitfalls in Dynamic Pressure Measurements. Powder Technology 106, 199–218 • van Ommen J.R., Coppens M.O., van den Bleek C.M., Schouten J.C. (2000) Early Warning of Agglomeration in Fluidized Beds by Attractor Comparison. AICHE Journal 46, 2183–2197 • van Velzen D., Flamm H.J., Langenkamp H., Casile A. (1974) Motion of Solids in Spouted Beds. Canadian Journal of Chemical Engineering 52, 156–161 • Villa J., van Ommen J.R., van den Bleek C.M. (2003) Early Detection of Foam Formation in Bubble Column by Attractor Comparison. AICHE Journal 49, 2442–2444 • Vince M.A., Lahey Jr R.T. (1982) On the Development of an Objective Flow • Regime Indicator. International Journal of Multiphase Flow 8, 93–124 Wang Z.Y., Jin N.D., Gao Z.K., Zong Y.B., Wang T. (2010) Nonlinear Dynamical Analysis of Large Diameter Vertical Upward Ol–Gas–Water ThreePhase Flow Pattern Characteristics. Chemical Engineering Science 65, 5226– 5236 295 • Wender I. (1996) Reactions of Synthesis Gas. Fuel Processing Technology 48, 189. • Xie T., Ghiaasiaan S. M., Karrila S., McDonough T. (2003) Flow Regimes and Gas Holdup in Paper Pulp–Water–Gas Three-Phase Slurry Flow. Chemical Engineering Science 58, 1417–1430 • Yang Y. B.; Devanathan N.; Dudukovic M. P. (1992) Liquid Backmixing in • Bubble Columns. Chemical Engineering Science 47, 2859. Yang, Y. (1997) Monte Carlo Simulations for CARPT Calibrations. Chapter 4 in Novel Techniques for Slurry Bubble Column Hydrodynamics, Annual Tech. Report, 2 (July 1996-June 1997) to DOE from Chemical Reaction Engineering Laboratory (DOEFG2295 PC 95212) 20–39 • Zhang, J.P., Grace, J.R., Epstein, N., Lim, K.S. (1997). Flow Regime Identification in Gas–Liquid Flow and Three Phase Fluidized Beds. Chemical Engineering Science 52, 3979–3992 • Zijerveld R.C., Johnsson F., Marzocchella A., Schouten J.C., van den Bleek C.M. (1998) Fluidization Regimes and Transitions From Fixed Bed to Dilute Transport Flow. Powder Technology 95, 185–204 296
 0
0
Anuncio
Documentos relacionados

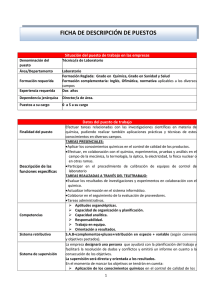
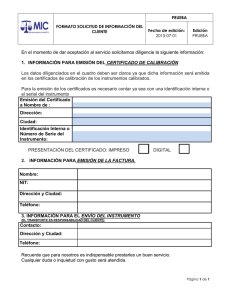
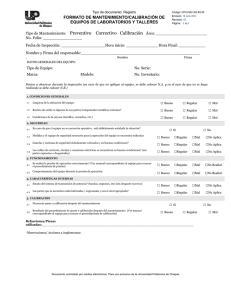

Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados