- Ninguna Categoria
tema 1 - Ingeniería Mecánica Aplicada y Computacional
Anuncio
TEMA 0
0.1
0.2
0.3
0.4
,1752'8&&,Ð1$/$7(25Ì$'(0É48,1$6
Introducción histórica.
0.1.1 La Antigüedad.
0.1.2 La Edad Media.
0.1.3 El Renacimiento.
0.1.4 El Siglo XVII.
0.1.5 El Siglo XVIII.
0.1.6 El Siglo XIX.
0.1.7 El Siglo XX.
La Teoría de Máquinas. Concepto y Objetivos.
0.2.1 Relación de la Teoría de Máquinas con otras disciplinas.
0.2.2 La Cinemática y la Dinámica.
Análisis y Síntesis.
Programa de la asignatura.
,1752'8&&,Ð1+,67Ð5,&$
La forma de proceder del entendimiento humano, que pasa GHORVHQVLEOH
DORLQPDWHULDO\GHORSDUWLFXODUDORXQLYHUVDO, tiene una excepcional confirmación
en la génesis y desarrollo de las materias incluidas dentro de la asignatura de
7HRUtDGH0iTXLQDV.
Ante la realidad evidente del movimiento físico - o local - de los cuerpos
naturales, cabe plantearse dos primeros interrogantes necesarios: "¢TXp HV HO
PRYLPLHQWR"", y "¢FyPR VH SXHGH PHGLU"". A la primera pregunta se ha
respondido afirmando que HOPRYLPLHQWRGHXQFXHUSRHVVXFDPELRGHSRVLFLyQ
HQXQUHIHUHQFLDODEVROXWR, cambio que está parametrizado por el tiempo. Por su
parte, la segunda plantea el problema básico de las ciencias experimentales: el
problema de la medida.
Aceptando que se ha superado dentro de ciertos límites - por imprecisos
que estos sean - este problema, y que se es capaz de cuantificar de alguna
manera el movimiento, el científico da un paso más al inquirir: "¢SRU TXp VH
SURGXFH HO PRYLPLHQWR"". Cuestión que le llevará a un proceso analítico que
conduce al establecimiento de unas ciertas causas del movimiento (fuerzas,
inercias, ...).
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
Para la 0HFiQLFD WHyULFD este proceso finaliza cuando, avanzando un
estadio más, se obtienen unas leyes mediante las que se relacionan - de un
modo universal - las causas del movimiento con esas magnitudes que lo
cuantifican, y se llevan esas leyes a sus últimas consecuencias.
En este itinerario se ha pasado del PRYLPLHQWR GH XQ FXHUSR al
PRYLPLHQWR GH ORV FXHUSRV HQ JHQHUDO y de una realidad física VHQVLEOH, el
PRYLPLHQWR, a unas leyes o SULQFLSLRV JHQHUDOHV que - en cuanto a tales - no
entran en la categoría de lo sensible.
Este proceso es necesario y aún imprescindible, para quien cultive la
disciplina de 7HRUtDGH0iTXLQDV; sin embargo, no basta. Evidentemente, debe
conocer sus fundamentos científicos - y desde esta perspectiva se asimilan los
PHFDQLVPRV WHyULFRV -, pero a partir de ellos ha de ser capaz de idear - y aún
realizar - un "ingenio" que verifique una determinada operación mecánica
preestablecida.
Se ha cerrado el ciclo: GH OD FRQVLGHUDFLyQ FLHQWtILFD GH OR FRQFUHWR VH
HVWDEOHFHXQDOH\GHFRPSRUWDPLHQWRItVLFR\DSR\iQGRVHHQHOODVHFRQVWUX\HXQ
HQWHFRQFUHWRSDUDUHDOL]DUXQDIXQFLyQGHWHUPLQDGD.
No obstante, este paso inverso - desde la ley hasta el ente concreto - no
es tan controvertible como a primera vista pudiera parecer. En efecto, el proceso
de abstracción, que concluye en la ley mecánica, prescinde de un sin número de
datos y circunstancias físicas para centrarse en los aspectos sustanciales del
fenómeno. Por esta razón, el mundo real difiere del mundo cuyo comportamiento
viene establecido por las leyes - por los modelos matemáticos consonantes con
las leyes -, y esta divergencia - convenientemente cuantificada - es un índice
significativo de la fiabilidad de éste. Dicho de otro modo: OD OH\ UHSUHVHQWD XQ
PRGHORPDWHPiWLFRGHODUHDOLGDG\FRPRPRGHORHQWUDxDXQDGLVSDULGDGHQWUH
VXV SUHGLFFLRQHV \ ODV PHGLGDV H[SHULPHQWDOHV VL HVWD GLVSDULGDG IXHUD
UHODWLYDPHQWHSHTXHxDHOPRGHORHVDGHFXDGRHQFDVRFRQWUDULRLQDFHSWDEOH.
Por lo tanto, el paso de uno a otro mundo - del real al matemático entraña un indudable riesgo que sólo puede ser salvado por una especie de
intuición suprarracional del fenómeno mecánico, por la cual de modo global el
científico es capaz de evaluar estimativamente las innumerables incidencias
físicas que fueron omitidas en la abstracción de la ley. Se puede afirmar, por
- 0.2 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
tanto, que quien cultiva con el mayor nivel posible las materias contenidas en la
asignatura de 7HRUtDGH0iTXLQDV ha de ser simultáneamente científico y artista.
Por ello, al presentar a continuación la historia de la formación y
desarrollo de esas materias, se constatan sucesivamente según un orden
cronológico aquellas realizaciones prácticas mecánicas de interés que han
supuesto un hito histórico, y el progreso ininterrumpido de la abstracción
mecánica constatable por el desarrollo coherente de la teoría.
No es de extrañar, en consecuencia, que gran parte de esta historia
coincida con la de la 0HFiQLFD WHyULFD. De hecho, no fue hasta principios del
siglo XIX cuando se produjo la autonomía de la 0HFiQLFDDSOLFDGD en cuyo seno
se albergan las materias asociadas a la 7HRUtDGH0iTXLQDV.
/D$QWLJHGDG
Ya en el 260 a. de C. parece que existía en China el llamado "FDUURTXH
PLUDKDFLDHO6XU", un ingenioso mecanismo montado en un carro que - PHUFHGD
XQ WUHQ HSLFLFORLGDO GH HQJUDQDMHV - mantenía el brazo de una figura humana
apuntando siempre hacia el Sur, independientemente de en qué dirección se
moviera el carro, y era utilizado como brújula por los viajeros que atravesaban el
desierto de Gobi.
En poemas de la literatura hindú, compuestos hacia el año 1700 a. de C.,
se mencionan carros y ruedas, lo que nos permite suponer que ya entonces había
mecanismos suficientemente conocidos.
Homero, cuya existencia se sitúa hacia el siglo X a. de C., se refirió a una
manivela en la Ilíada (XVI, 775) y en la Odisea (XXIV, 39), así como a un
dispositivo para taladrar en la Odisea (IX, 384).
Fueron los sabios griegos quienes se preguntaron por primera vez por la
naturaleza del movimiento. Sus observaciones trascienden generalmente la
contingencia de lo fenoménico para intentar profundizar en aquello que
permanece como substrato de todo movimiento.
Aristóteles (384-322 a. de C.) estableció un coprincipio potencial y pasivo
que permanece en todo movimiento y otro coprincipio actual que explica la propia
realidad del movimiento (teoría hilemórfica). Sin embargo, a lo largo de sus obras
trató aspectos puramente mecánicos como la composición geométrica de fuerzas
y la caída libre de los cuerpos, a la que dio una respuesta errónea: "SDUDLGpQWLFR
- 0.3 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
YROXPHQ ORV FXHUSRV FDHQ PiV UiSLGDPHQWH FXDQWR PiV SHVDGRV VRQ";
probablemente porque no llegó a captar el concepto de "movimiento en el vacío",
ni tuvo la oportunidad de realizar una rigurosa experimentación.
Arquímedes (287-212 a. de C.) tiene indudablemente una trascendencia
superior, y en él ven algunos al verdadero iniciador de la Mecánica como ciencia.
Definió el centro de gravedad de un sistema material, estableció las leyes de la
palanca -"GDGPHXQSXQWRGHDSR\R\PRYHUpOD7LHUUD"-, enunció el principio que
lleva su nombre en Mecánica de Fluidos y desarrolló numerosos ingenios bélicos
para la defensa de Siracusa (Sicilia) de donde era originario y en donde residía.
Ctesebio (285 a. de C.), un genio de la intuición técnica, desarrolló
numerosos inventos, tales como un fusil de aire comprimido, un instrumento
musical de aire alimentado por un fuelle, una bomba aspirante-impelente y un
dispositivo para regular la posición de un espejo de salón.
Unos cien años más tarde, la influencia de la cultura helena traspasa las
fronteras de Grecia y aparece en la ciudad de Alejandría una floreciente pléyade
de sabios, que subsiste durante varios siglos. Herón de Alejandría (siglo I d. de
C.) fue el primero que empleó el vapor de agua como generador de potencia y
escribió 3 libros en los que describe muchas máquinas, tales como la prensa de
tornillo y un sofisticado odómetro que permitía medir fracciones de milla.
El mundo romano, tan notable en la jurisprudencia y en la milicia, apenas
se manifestó en el campo de las matemáticas y de las ciencias de la naturaleza.
Únicamente cabría citar a escritores romanos que transmitieron las
investigaciones griegas: Vitrubio (85 a. de C.), arquitecto del emperador Augusto,
escribió 'H$UFKLWHFWXUD, reseña tecnológica de la época; y Boecio (480-525 d. de
C.), recopiló en el 4XDGULYLXP la herencia científica helenística.
/D(GDG0HGLD
El periodo que abarca el final del imperio romano y toda la Edad Media,
es decir algo más de 10 siglos, es un tiempo de una cierta decadencia técnica y
científico-experimental. Se reprodujeron y mejoraron ligeramente los ingenios
existentes, pero con una casi total carencia de creatividad mecánica.
(O5HQDFLPLHQWR
Fue un momento histórico de resurgimiento en todas las áreas del saber
humano, caracterizado por la aparición de grandes genios, algunos de los cuales
- 0.4 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
centraron su atención en los problemas mecánicos. Una de las personalidades
más destacadas fue, sin duda, Leonardo da Vinci (1452-1519), en cuyos famosos
diseños de máquinas se han inspirado tantos otros autores posteriormente. En
sus apuntes se encuentran diseños de grúas (con poleas, engranajes), ingenios
voladores, dispositivos para respirar bajo el agua, mecanismos de transformación
del movimiento (rotación en translación alternativa, ...), odómetros, etc.
Gerolamo Cardano (1501-1576) inventó la junta de transmisión que lleva
su nombre, y estudió la trayectoria de un punto de una circunferencia que rueda
por el interior de otra circunferencia de diámetro doble.
La Estática, prácticamente olvidada desde Arquímedes, experimentó un
notable desarrollo merced a los trabajos de Simon Stevin (1548-1620) que publicó
a principios del siglo XVII su obra "+\SRPQHPDWD 0DWKHPDWLFD" en la que trata
del equilibrio en un plano inclinado y de las poleas, empleando con soltura y
seguridad la composición de fuerzas por el método del paralelogramo.
La máxima figura de la época renacentista fue, sin lugar a dudas, el
italiano Galileo Galilei (1564-1642) filósofo, matemático y físico que ejerció sus
tareas docentes en Pisa, Padua y, más tarde, en Florencia. Vehemente defensor
de la teoría heliocéntrica, se le puede considerar como el iniciador de la
Dinámica. Estudió la caída libre de los cuerpos, separando los aspectos
cinemático y dinámico, y restringiendo su actividad al primero de ellos. No
pretendió explicar el movimiento sino describirlo: "8QD YH] TXH VH FRQRFH FRQ
H[DFWLWXG FyPR FDHQ ORV FXHUSRV HQWRQFHV VH SXHGH SUREDU D HVWDEOHFHU ODV
OH\HVSURIXQGDVTXHORULJHQ". Oponiéndose a la teoría aristotélica afirmó que los
cuerpos caen en el vacío con la misma velocidad.
Galileo no fue solamente un hábil experimentador, sino que mostró
también un agudo ingenio inductivo. Por razonamientos teóricos fue capaz de
formular las leyes del movimiento uniformemente acelerado, y dedujo la
trayectoria parabólica de un proyectil lanzado horizontalmente y sometido a la
acción de la gravedad. Conoció la fuerza centrífuga y enunció la ley del
sincronismo del péndulo, estableciendo que el periodo del movimiento era
proporcional a la raíz cuadrada de su longitud e independiente de su masa. En
sus trabajos de Estática, empleó la construcción del paralelogramo para la
composición de fuerzas y definió una nueva magnitud: el momento de una fuerza.
- 0.5 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
Los trabajos de Galileo fueron continuados por una pléyade de discípulos,
en su mayoría italianos, entre quienes merece destacar a Evangelista Torricelli.
En su obra "'H0RWX*UDYLXP1DWXUDOLWHU'HVFHQGHQWLXPHW3URMHFWRUXP" abordó
también la caída de los cuerpos. Fue el primero en afirmar que la Mecánica es
una rama de las Matemáticas en la que aparecen unas magnitudes nuevas, tales
como la IXHU]D, y un concepto también nuevo, el PRYLPLHQWR. En su obra se
produjo, de hecho, la emancipación del movimiento y de las fuerzas dentro de
una Mecánica racional.
En el año 1561, nació en Londres F. Bacon, creador del empirismo inglés.
De raíz plenamente filosófica su obra tiene unas indudables repercusiones en el
desarrollo de las ciencias físico-naturales.
(O6LJOR;9,,
En él la Mecánica alcanza una cierta madurez como ciencia, lográndose
al fin proporcionar una cierta unidad a los conocimientos desarrollados hasta
entonces. Es la época de los grandes sabios: Descartes, Pascal y Mariot en
Francia, Huygens en Holanda, Boyle, Hooke y Newton en Inglaterra, ...
René Descartes (1596-1650) formuló correctamente la ley de la inercia,
aunque no llegó a captar bien el concepto de aceleración. Sus seguidores
sostuvieron una controversia con Leibnitz (1646-1716) acerca de la "HILFDFLD" del
movimiento. Para los cartesianos la eficacia era proporcional a la velocidad;
mientras que para Leibnitz lo era a su cuadrado. Analizando con detenimiento se
observa que este desacuerdo es tan sólo una discrepancia de puntos de vista
sobre un mismo hecho. Para Descartes la eficacia se contaba por el WLHPSR, y
para Leibnitz por el HVSDFLR... y ambos tienen razón. Sin embargo, esta disputa
constituye el primer momento histórico en que se presentan dos concepciones
radicales de la Mecánica: la Mecánica vectorial y la Mecánica variacional.
Christian Huygens (1629-1695) describió los relojes de péndulo de su
época e inventó el péndulo cicloidal, cuyo periodo es independiente de la
amplitud del movimiento (tautocronismo). Estableció la reciprocidad entre los
centros de suspensión y oscilación (teorema de Huygens), y parece que fue
también precursor de la ecuación de Euler-Savary.
Probablemente el científico más importante de la época fue Isaac Newton
(1642-1727). En él finaliza una época y con él se inicia otra. Sistematizó todos los
conocimientos inconexos anteriores dándoles una estructura lógica definitiva. En
- 0.6 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
su obra "3ULQFLSLD 0DWKHPDWLFD 3KLORVRSKLDH 1DWXUDH" estableció las tres leyes
fundamentales de la Dinámica. Matizó de forma definitiva la diferencia entre masa
y peso, y enunció la Ley de la Gravitación Universal, basándose en la descripción
que había hecho Johannes Kepler (1571-1630) del movimiento planetario.
Philippe de la Hire (1640-1718) presentó en la Academia de Ciencias de
París el trabajo "7UDLWpGHV5RXOHWWHV", en el que introdujo los conceptos de base y
ruleta para el estudio del movimiento plano de un sólido indeformable.
Jean Bernoulli (1661-1748) intervino activamente en el desarrollo de la
Mecánica de Fluidos y reconoció el principio de los trabajos virtuales como un
principio general de la Estática. También desarrolló el concepto de centro
instantáneo de rotación en el movimiento plano.
(O6LJOR;9,,,
A lo largo de este siglo se va perfilando la Cinemática como ciencia, si
bien no se consolidará como tal hasta el siglo siguiente. Jacob Leupold (16741727) escribió la obra "7HDWUXP 0DFKLQDULXP" (9 volúmenes), una auténtica
recopilación de los inventos mecánicos de siglos precedentes, proporcionando la
primera definición de máquina: "VLVWHPDDUWLILFLDOFDSD]GHSURGXFLUXQPRYLPLHQWR
YHQWDMRVR\GHPRYHUORVFXHUSRVFRQDKRUURGHWLHPSR\GHIXHU]D".
Leonhard Euler (1707-1783), discípulo de Jean Bernoulli, estableció que
el movimiento plano de un sólido indeformable puede describirse como la
composición de una traslación y una rotación alrededor de un punto. Este
principio, extendido a la velocidad y aceleración, constituye el origen del DQiOLVLV
JUiILFR GH PHFDQLVPRV. También se le atribuye el empleo de los 3 ángulos que
llevan su nombre - precesión, nutación y rotación propia - y permiten orientar
espacialmente un sistema de referencia cartesiano con respecto a otro, así como
las ecuaciones dinámicas del movimiento de rotación de un sólido en el espacio.
James Watt (1736-1819) dedicó un gran esfuerzo a la VtQWHVLV GH
PRYLPLHQWRV, abordando el problema de la trayectoria de un punto del acoplador
del cuadrilátero articulado y logrando generar un movimiento rectilíneo
aproximado. Estos estudios le permitieron perfeccionar la máquina de vapor, a la
que dotó de un mecanismo capaz de transmitir la fuerza en ambos sentidos.
Gaspard Monge (1746-1818) contribuyó a la estructuración de la
enseñanza técnica superior. Fundador de l'Ecole Polytechnique de París, propuso
- 0.7 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
un curso sobre Elementos de Máquinas, a los que definió como "DTXHOORVPHGLRV
FDSDFHVGHPRGLILFDUODGLUHFFLyQGHOPRYLPLHQWR". A su vez, las obras de P. Lanz
y A. Betancourt, "(VVDL VXU OD FRPSRVLWLRQ GHV PDFKLQHV" (1808) y de J.N.
Hachette, "7UDLWp pOHPHQWDLUH GHV PDFKLQHV" (1811) contienen la organización
propuesta por Monge y L.M.N. Carnot - que la había ampliado sustancialmente en la que clasifican los mecanismos por la tarea que pueden realizar (por
ejemplo, convertir un movimiento circular continuo en otro rectilíneo alternativo).
(O6LJOR;,;
Durante este siglo, los conocimientos que constituyen hoy la Teoría de
Máquinas se fueron consolidando y madurando. La Geometría y el Análisis
Matemático contribuyeron notablemente a este progreso, motivado por el rápido
crecimiento tecnológico. Los estudiosos del siglo en este área pueden agruparse
principalmente en WUHVJUDQGHV(VFXHODV: la Francesa, la Alemana y la Inglesa.
0.1.6.1 Escuela Francesa
André Marie Ampère (1775-1836) reconoció la posibilidad de estudiar
movimiento de los mecanismos con independencia de las fuerzas que
producen, y en su obra "(VVDLVXUOD3KLORVRSKLHGHV6FLHQFHV" (1834) acuñó
término "FLQHPiWLFD", traducción del vocablo griego que significa movimiento.
el
lo
el
A
partir de este momento, la Cinemática comenzó a ser considerada como ciencia.
Gustave Gaspard de Coriolis (1792-1843), ingeniero de profesión y
director de l'Ecole Polytechnique (París), definió la componente de la aceleración
que lleva su nombre y fue un precursor de la Mecánica Aplicada moderna.
Michel Chasles (1793-1880) y Louis Poinsot (1777-1859) generalizaron
respectivamente los conceptos de centro instantáneo de rotación - ya introducido
por Jean Bernoulli - y de eje instantáneo de rotación.
0.1.6.2 Escuela Alemana
La Cinemática moderna comenzó con Franz Reuleaux (1829-1905),
profesor de Cinemática en el Politécnico de Zurich y en Berlín, a la vez que
director de la Real Academia de la Industria de Alemania. Fue el primero en
analizar los Mecanismos de modo sistemático y profundo, definiendo los
conceptos de HOHPHQWR, SDU, FDGHQD FLQHPiWLFD, HTXLYDOHQFLD FLQHPiWLFD e
LQYHUVLyQ. Clasificó los pares en "superiores" (contacto puntual o a lo largo de la
- 0.8 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
línea) e "inferiores" y apuntó la idea de la expansión de los pares de revolución.
Redujo toda máquina a una combinación de componentes: barras, ruedas, levas,
etc. Fue el creador de la "VtQWHVLVGHWLSR" (VtQWHVLVGH5HXOHDX[), centrada en la
selección del mecanismo adecuado para generar un movimiento preestablecido.
R. Mehmke y Karl Friedrich Möhr (1806-1879) introdujeron en Alemania
los métodos gráficos para el análisis de mecanismos, tales como el cinema de
velocidades (Mehmke).
Sigfrid Aronhold (1819) enunció, con anticipación a Kennedy, el "WHRUHPD
GHORVWUHVFHQWURV", si bien ambos desarrollaron el trabajo por separado.
Ludwig Burmester (1840-1927), profesor de Geometría Descriptiva y
Cinemática en Munich, desarrolló métodos geométricos para la VtQWHVLV
GLPHQVLRQDO, y fue el iniciador de lo que más tarde sería la Escuela Alemana, que
ostentó la primacía de la Cinemática hasta bien entrado el siglo actual.
Martín Grübler (1851-1935), profesor en las Universidades de Zurich,
Riga, Berlín y Dresde, estableció el "FULWHULR GH PRYLOLGDG" para mecanismos
planos y espaciales que sirvió como punto de partida para abordar el problema de
la VtQWHVLVGHQ~PHUR.
0.1.6.3 Escuela Inglesa
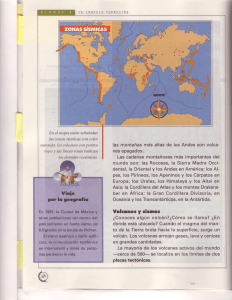
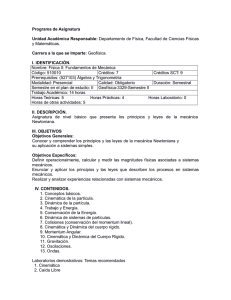
Robert Willis (1800-1875), ingeniero y antropólogo, fue profesor de la
Universidad de Cambridge. En su obra, "3ULQFLSOHV RI 0HFKDQLVPV" (1841)
propuso un criterio de clasificación de los mecanismos en base a la relación de
transmisión del movimiento entre los elementos de entrada y salida.
*(1(52
Piezas en
contacto
directo
Ligadura
rígida
Ligafura
flexible
&/$6(6(17,'2'(75$160,6,Ð1
&2167$17(
3(5,Ð',&$0(17(9$5,$%/(
&/$6($
&/$6(%
&/$6(&
ω1/ ω 2= constante
ω 1/ ω 2= variable
ω 1/ ω 2= constante o variable
Cilindros, conos e
hiperboloides de fricción,
engranajes, tornillo sin fin
Levas excéntricas, palancas
rodantes
Excéntricas, cremalleras dobles
oscilantes, escapes diversos
Ruedas acopladas
Sistemas articulados de mov.
continuo, junta de Cardan
Cuadriláteros articulados
Poleas y cadenas
Poleas especiales, bobinas
para cables
Poleas especiales
Tabla 0.1 - Clasificación de Willis para los mecanismos
- 0.9 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
Esta concepción del problema supuso una ruptura radical con la tradición
anterior, representada por Monge, cuyo enfoque era fundamentalmente
descriptivo. Sugirió la posibilidad de una aproximación sistemática a la hora de
proyectar mecanismos, lo que originó extraordinarios avances en el terreno de la
Síntesis de Mecanismos. Su obra ejerció una influencia tal que, en poco tiempo,
la clasificación por él propuesta fue adoptada por todos los autores. Consideró
que "WRGDVODVFRPELQDFLRQHVVLPSOHVGHPHFDQLVPRVSXHGHQDJUXSDUVHHQWUHV
FODVHV", que se sintetizan en la siguiente tabla.
William John MacQuorn Rankine (1820-1872), profesor de la Universidad
de Glasgow, publicó la obra "$0DQXDORI0DFKLQHU\DQG0LOOZRUN" (1869 ), en la
que dedicó cerca de trescientas páginas a la Cinemática de las Máquinas, que él
llamó "JHRPHWUtD GH ODV PiTXLQDV". Siguió los criterios de Willis, pero aportó el
empleo generalizado de las propiedades del centro instantáneo de rotación para
determinar el campo de velocidades del sólido indeformable en el caso plano.
Samuel Roberts (1827-1893), abogado estudioso de las matemáticas,
demostró la existencia de tres tipos diferentes de cuadriláteros articulados
capaces de trazar idénticas curvas de acoplador.
Alexander Blake William Kennedy (1847-1928), profesor del University
College (Londres), formuló el algoritmo gráfico para la determinación del polo del
movimiento relativo entre dos elementos de un Mecanismo (WHRUHPD GH ORV WUHV
FHQWURV) y tradujo al inglés la obra de F. Reuleaux contribuyendo a su difusión.
Robert Henry Smith (1825-1916), profesor de Mecánica Aplicada,
desarrolló su actividad docente en Japón. Introdujo el empleo de métodos
gráficos para el análisis de velocidades en los mecanismos, técnica que se
generalizaría a partir de 1930.
0.1.6.4 Otras Escuelas
Giuseppe Antonio Borgnis (1780), profesor de Mecánica en la
Universidad de Pavía, sugirió la división de los componentes de las máquinas en
seis tipos: receptores, comunicadores, modificadores, soportes, reguladores y
operadores. Esta clasificación fue simplificada por De Coriolis que redujo las
partes de una máquina a tres: elementos receptores de la acción externa,
elementos transmisores del movimiento y elementos conducidos.
- 0.10 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
Pafnutij Chebyshev (1821-1894), profesor de matemáticas en la
Universidad de San Petesburgo y creador de la Escuela rusa de Cinemática, se
dedicó al dimensionamiento del cuadrilátero articulado capaz de generar
trayectorias rectas y circulares con error mínimo, utilizando para ello los
polinomios que llevan su nombre.
(O6LJOR;;
El comienzo del siglo se encuentra dominado por las Escuelas Alemana y
Rusa. La primera - fundada por Burmester - se polarizó hacia los problemas de
VtQWHVLV GLPHQVLRQDO, sobre todo en su aplicación a los mecanismos planos. En
Rusia, los discípulos de Chebyshev prosiguieron sus trabajos en las técnicas de
ajustes y aproximación de curvas, desarrollando métodos especiales y nuevas
herramientas matemáticas. Entre ellos son particularmente notables: S. Bloch,
que introdujo los números complejos en la síntesis cinemática, J.H. Dimentberg,
que utilizó los números duales en el análisis de mecanismos espaciales, y S.G.
Kislitsin, que empleó por primera vez el cálculo tensorial.
Hasta la Segunda Guerra Mundial, se puede encontrar un gran número
de investigadores, en su mayor parte europeos, que contribuyeron al desarrollo
de la Cinemática, y con el denominador común de que sus métodos de trabajo se
apoyaban fuertemente en la Geometría. Terminada la guerra, surge con gran
ímpetu la Escuela Americana (A. Svoboda, J.A. Hrones y G.L. Nelson) donde
pronto se empezó a utilizar profusamente el computador, promoviendo el
desarrollo de nuevos métodos algebraicos y numéricos, mucho más generales
que los métodos gráficos previamente utilizados.
Hoy en día, un gran porcentaje de los métodos en uso están orientados al
computador y la investigación se dirige, no sólo hacia la mejora de los propios
métodos, sino también hacia un mejor aprovechamiento de las capacidades
informáticas. Una de las capacidades más interesantes es la de resolver
problemas de modo interactivo, lo cual tiene enormes posibilidades tanto en el
campo del diseño como en el de la enseñanza.
Limitándose a los tres últimos decenios, y con la seguridad de omitir
muchos nombres importantes, cabría citar las aportaciones al mundo de los
mecanismos de: Freudenstein, Roth, Sandor, Soni, Tesar, Uicker y Chace en
Estados Unidos; Bottema y Dijksman, en Holanda; Crossley y Hunt, en Australia;
y muchos otros esparcidos por toda la geografía mundial.
- 0.11 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
El desarrollo de las Escuelas Cinemáticas mencionadas trajo consigo un
fenómeno marginal enormemente significativo: se constató que entre el 45% y el
67% de las referencias bibliográficas citadas en un artículo escrito en un
determinado país correspondían a trabajos realizados en ese mismo país, lo que
manifestaba una notable falta de intercambio de información entre las Escuelas.
En 1965, se celebra en Varna (Bulgaria) el Primer Congreso Internacional
sobre Teoría de Máquinas y Mecanismos, en el que participaron 120 ingenieros e
investigadores de 11 países. Durante el mismo, la delegación búlgara propuso la
creación de una Federación Internacional para la Teoría de Máquinas y
Mecanismos. La idea fue aceptada y, al cabo de 4 años, la IFToMM (International
Federation for the Theory of Machines and Mechanisms) celebró su Asamblea
Inaugural el 27 de septiembre de 1969 en Zacopane (Polonia). En las últimas
décadas, con el nacimiento y consolidación de la IFToMM, los estudios de la
disciplina de Teoría de Máquinas se han hecho realmente universales.
España ingresó provisionalmente como miembro de la IFToMM en 1975,
y de forma definitiva en el V Congreso en Montreal (Canadá, 1979). De esta
manera, nuestro país, en el que la Teoría Máquinas presenta todavía un grado de
desarrollo incipiente, se unía al grupo de países más avanzados en esta materia.
/$7(25Ì$'(0É48,1$6&21&(372<2%-(7,926
La historia del desarrollo material de la Humanidad está íntimamente
relacionada con la historia de las máquinas que el hombre ha ideado y utilizado,
tal y como se ha podido apreciar en el anterior apartado. Así, se ha llegado a
definir la Ingeniería como el "FRQMXQWRGHFLHQFLDVTXHWUDWDQGHSRQHUDOVHUYLFLR
GHOKRPEUHORVJUDQGHVUHFXUVRVGHOD1DWXUDOH]D", afirmando que el hombre es
"XQDQLPDOTXHXWLOL]DKHUUDPLHQWDV", un animal que es capaz de hacerse ayudar
en su trabajo por máquinas más o menos evolucionadas: desde una simple
palanca, a los productos más sofisticados de la tecnología moderna.
La 7HRUtD GH 0iTXLQDV, cuyo descriptor es "&LQHPiWLFD \ 'LQiPLFD GH
0HFDQLVPRV\0iTXLQDV", es una asignatura dedicada al estudio del movimiento,
sus causas y efectos, y añade una importante restricción en el objeto de su
estudio al incluir "GH 0HFDQLVPRV \ 0iTXLQDV". Esta restricción influye de forma
decisiva en el punto de vista con el que la 7HRUtD GH 0iTXLQDV se construye y
desarrolla; se trata de Mecánica Aplicada, y aplicada a un conjunto muy concreto
- 0.12 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
de problemas: los propios de las máquinas. Su importancia es evidente, resulta
difícil encontrar un campo de la actividad humana en el que las máquinas no se
hallen de alguna manera presentes; y constituye una materia de especial interés
para el ingeniero industrial, por ser la industria el ámbito natural de las máquinas.
Por lo general, los Planes de Estudio de las distintas Escuelas de
Ingenieros sitúan la asignatura hacia la mitad de la carrera. Ello es debido, por un
lado, al fuerte apoyo que precisa de la Mecánica Racional (de la que toma sus
principios y teoremas) y de las Matemáticas (que le sirven de vehículo y
lenguaje), materias ambas que se imparten en los primeros cursos; y, por otro, al
carácter de puente que tiene hacia asignaturas más decididamente tecnológicas,
como el Cálculo, Construcción y Diseño de Máquinas o la Tecnología Mecánica.
5HODFLyQGHOD7HRUtDGH0iTXLQDVFRQRWUDVGLVFLSOLQDV
0.2.1.1 Mecánica Racional
Constituye la base fundamental de la asignatura. La 7HRUtDGH0iTXLQDV
desarrolla los principios y teoremas de la Mecánica Racional, aplicándolos a una
clase de problemas muy definidos: los relacionados con máquinas. Se trata, por
tanto, de una Mecánica Aplicada a máquinas y mecanismos.
Por ello, cuestiones propias de la Mecánica Racional como fuerzas
centrales, mecánica celeste, dinámica del punto material, mecánica relativista,
mecánica cuántica, etc., no tienen aplicación aquí. Por el contrario, el análisis
vectorial, la cinemática del movimiento plano y espacial, la mecánica analítica, las
ecuaciones diferenciales del movimiento, los efectos del rozamiento, las
vibraciones, percusiones, ... sí son aspectos incluidos dentro de la 7HRUtD GH
0iTXLQDV. En este caso, no obstante, la atención no se centrará tanto en el
establecimiento de los principios y su formulación, como en su aplicación.
0.2.1.2 Matemáticas
Constituyen el vehículo, el lenguaje, utilizado en las labores de desarrollo
e investigación asociadas a la Teoría de Máquinas. Son, por tanto, tan
importantes y necesarias como la Mecánica Racional. La Cinemática es, en gran
parte, Geometría, pero también incluye Análisis y Álgebra Matricial. La Dinámica,
a su vez, se basa en las Ecuaciones Diferenciales del movimiento, pero su
tratamiento y desarrollo también incluye Análisis Multivariable y Álgebra Matricial.
En ambos casos, el Análisis Numérico resulta una herramienta imprescindible.
- 0.13 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
0.2.1.3 Cálculo, Construcción y Ensayo de Máquinas
Constituye la tercera gran vecina de la 7HRUtD GH 0iTXLQDV. De hecho,
mantiene una relación tan estrecha que, en ocasiones, no resulta fácil - ni
práctico - delimitar sus respectivos dominios. Puede afirmarse, con carácter
general, que es una asignatura menos teórica y más práctica, menos científica y
más tecnológica. Los modelos matemáticos desarrollados en la 7HRUtD GH
0iTXLQDV se "hacen realidad" en esta asignatura: se trazan unos planos, se
determina el material de construcción, se establecen los límites de resistencia
mecánica, se calculan los costos asociados, ...
Dentro de la 7HRUtDGH0iTXLQDV cada resultado, cada conclusión, está
siempre justificado y razonado. En Construcción de Máquinas, sin embargo,
muchas veces el diseño se basa en resultados experimentales - en fórmulas
empíricas - sin que se llegue a vislumbrar una aparente justificación teórica para
los criterios utilizados. Puede concluirse que, mientras la 7HRUtD GH 0iTXLQDV
desarrolla y analiza modelos matemáticos, el Cálculo, Construcción y Ensayo de
Máquinas establece el puente entre los modelos y la realidad práctica.
0.2.1.4 Otras asignaturas
Además de las ya establecidas, la 7HRUtD GH 0iTXLQDV mantiene
relaciones con otras muchas asignaturas como: la Electrónica, la Automática y la
Teoría del Control, el Dibujo y la Geometría Descriptiva, la Resistencia de
Materiales y la Metalurgia, la Mecánica de Fluidos, las Máquinas Eléctricas, los
Motores Térmicos, la Tecnología Mecánica, la Automoción, la Robótica, ...
/D&LQHPiWLFD\OD'LQiPLFD
El contenido de la 7HRUtD GH 0iTXLQDV se divide, tradicionalmente, en
dos partes: la Cinemática y la Dinámica. La Cinemática estudia el movimiento con
independencia de las causas que lo producen, es decir, de las fuerzas. Estudia
los "SRVLEOHV" movimientos. Se interesa por problemas de trayectorias,
posiciones, desplazamientos, velocidades, aceleraciones, etc. Los problemas
cinemáticos pueden abordarse desde un SXQWR GH YLVWD JUiILFR, en estrecha
relación con la Geometría, o bien desde una SHUVSHFWLYD DQDOtWLFD, más en
relación con el Cálculo y el Álgebra. Ambos formalismos tienen sus ventajas y sus
inconvenientes. El primero resulta ventajoso desde el punto de vista pedagógico,
ya que ayuda a un mayor desarrollo de la intuición por la proverbial originalidad
- 0.14 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
de los métodos empleados y la considerable dosis de ingenio necesaria para su
aplicación. El segundo, por otra parte, da lugar a formulaciones mucho más
generales y potentes - susceptibles de ser orientadas al computador - desde el
punto de vista de su capacidad para resolver problemas complejos.
La Dinámica, por su parte, estudia el movimiento junto con las fuerzas
motoras que lo producen y las reacciones que se originan. Aborda problemas de
potencia motriz, rendimiento, reacciones en apoyos, tensiones y deformaciones
elásticas, vibraciones, fallos por choque o fatiga, problemas tribológicos, etc. La
dificultad que presenta la resolución de un problema dinámico suele ser, en
general, muy superior a la de uno cinemático, debido principalmente al distinto
papel que juega la variable tiempo y a los efectos no lineales que aparecen.
De forma análoga a lo que sucede en Cinemática, también en Dinámica
existe un enfoque tradicional gráfico o grafoanalítico y un enfoque moderno
analítico y orientado al computador. Aquí, sin embargo, las diferencias no son tan
acusadas ya que las evaluaciones dinámicas del movimiento siempre se plantean
a partir de los mismos principios generales: Ecuaciones de Lagrange, Leyes de
Newton, Teorema de los Trabajos Virtuales, Principio de Hamilton, ...
$1É/,6,6<6Ì17(6,6
Desde otro punto de vista, cada parte de la 7HRUtDGH0iTXLQDV puede
considerarse de diferente manera según el objetivo perseguido: analizar una
máquina ya existente - $QiOLVLV - o diseñar un mecanismo que cumpla una
determinada función - 6tQWHVLV-.
La Síntesis Cinemática es una disciplina bien establecida, pero no puede
decirse lo mismo de la Síntesis Dinámica. Generalmente, en Dinámica se aplican
métodos de Análisis: si se trata de obtener el movimiento de un sistema sometido
a unas ciertas acciones conocidas, se hablará de "SUREOHPD GLUHFWR"; por el
contrario, si se pretende calcular los esfuerzos motores y los esfuerzos de
reacción en los enlaces y elementos, a partir de un movimiento conocido, se
hablará de "SUREOHPD GLQiPLFR LQYHUVR". En todos los métodos dinámicos de
análisis, el análisis cinemático será un paso previo de uso obligado, pues para
hallar cómo se mueve un sistema (Dinámica), es necesario ser capaz de resolver
previamente el problema de cómo puede moverse (Cinemática) - por ejemplo, las
fuerzas de inercia sólo pueden formularse en función de las aceleraciones -.
- 0.15 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
Hoy en día, existen programas de computador capaces de efectuar
análisis cinemáticos y dinámicos de sistemas mecánicos complejos. Estos
programas realizan auténticas simulaciones, de las que pueden obtenerse tanto
resultados numéricos (tablas, gráficas, ...), como gráficos, visualizando de manera
realista el movimiento del sistema en la propia pantalla del computador. Es
importante constatar como el usuario de estos programas debe poseer unos
sólidos conocimientos teóricos, que le permitan definir correctamente el modelo
más apropiado para su problema, detectar los posibles errores en dicho modelo e
interpretar correctamente los resultados obtenidos.
La Síntesis o diseño de mecanismos es el gran objetivo del ingeniero de
máquinas. En todas las ramas de la ingeniería sucede que el problema de diseño
es diferente y configura una mayor dificultad que el de análisis; pero resulta difícil
encontrar una disciplina en la que las diferencias resulten tan marcadas, y los
métodos de síntesis tan originales e ingeniosos, como en la Cinemática. Mientras
que en casi todas las disciplinas los métodos de síntesis se apoyan de manera
importante en los de análisis, en Cinemática la síntesis de mecanismos se ha
desarrollado de forma mucho más independiente.
En los últimos años han comenzado a desarrollarse métodos de diseño
óptimo de mecanismos con requerimientos dinámicos. Normalmente se comienza
resolviendo el problema del cálculo de sensitividades, es decir, de la variación de
la respuesta del sistema con respecto a cada una de las variables de diseño
(dimensiones, masas, etc.); posteriormente, puede abordarse la optimización
propiamente dicha. Estos métodos son completamente numéricos y suponen un
costo muy importante en tiempo de computador.
352*5$0$'(/$$6,*1$785$
1
Según el 3ODQ GH (VWXGLRV DFWXDO , la asignatura de 7HRUtD GH
0iTXLQDV se imparte con carácter troncal en el tercer curso de los estudios de
Ingeniero Industrial y consta de seis créditos - tres de teoría y tres de prácticas -,
lo que equivale a un total de 60 horas por curso académico. Sus descriptores son:
FLQHPiWLFD\GLQiPLFDGHPHFDQLVPRV\PiTXLQDV.
1 Suplemento B.O.E. núm. 276, 18 noviembre 1995, págs. 168-182
- 0.16 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
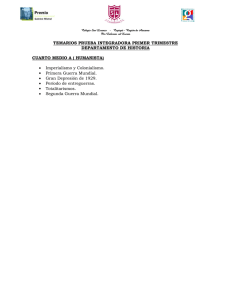
El programa de teoría para esta asignatura se ha estructurado en un total
de ocho temas a desarrollar en treinta lecciones o clases de una hora cada una.
En la figura, se recoge de forma esquemática un diagrama con la distribución de
los temas.
I NT R OD U CCI ÓN A L A T EOR Í A D E MÁQU I NAS
I NT R OD U CCI ÓN A L A T EOR Í A D E MÁQU I NAS
ANÁL I SI S Y SÍ NT ESI S EST R U CT U R AL . CONCEPT OS GENER AL ES
ANÁL I SI S Y SÍ NT ESI S EST R U CT U R AL . CONCEPT OS GENER AL ES
ANÁL I SI S CI NEMÁT I CO D E MECANI SMOS PL ANOS
ANÁL I SI S CI NEMÁT I CO D E MECANI SMOS PL ANOS
SÍ NT ESI S CI NEMÁT I CA D E MECANI SMOS
SÍ NT ESI S CI NEMÁT I CA D E MECANI SMOS
ANÁL I SI S CI NET OEST ÁT I CO D E MECANI SMOS
ANÁL I SI S CI NET OEST ÁT I CO D E MECANI SMOS
ANÁL I SI S D I NÁMI CO D E MECANI SMOS
ANÁL I SI S D I NÁMI CO D E MECANI SMOS
MECANI SMOS D E CONT ACT O D I R ECT O: L EVAS
MECANI SMOS D E CONT ACT O D I R ECT O: L EVAS
MECANI SMOS D E CONT ACT O D I R ECT O: ENGR ANAJES
MECANI SMOS D E CONT ACT O D I R ECT O: ENGR ANAJES
T R ENES D E ENGR ANAJES
T R ENES D E ENGR ANAJES
Figura 0.1 - Distribución temática de la asignatura 7HRUtDGH0iTXLQDV.
El programa de clases prácticas consta de dos partes claramente
diferenciadas: las clases de problemas y las clases prácticas de laboratorio. Las
clases de problemas tienen como objetivo la resolución en clase de ejercicios o
problemas relacionados con la materia que en ese momento se esté
desarrollando. De hecho, la realización de las clases de problemas y de las de
- 0.17 -
7(0$,1752'8&&,Ï1$/$7(25Ë$'(0È48,1$6
teoría se lleva a cabo de forma intercalada, para así facilitar el planteamiento de
aquellos problemas relacionados directamente con la última materia impartida.
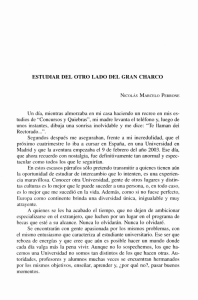
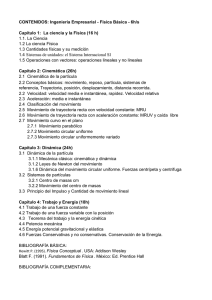
La parte correspondiente a las prácticas de laboratorio consta de una
serie de prácticas obligatorias para todos aquellos alumnos matriculados en la
asignatura. En el diagrama de la figura, aparecen recogidas estas prácticas y su
vinculación con los correspondientes temas de teoría.
35(&212&,0,(172'(',9(56260(&$1,6026
35(&212&,0,(172'(',9(56260(&$1,6026
'(7(50,1$&,Ð1'('(63/$=$0,(1726
'(7(50,1$&,Ð1'('(63/$=$0,(1726
9(/2&,'$'(6<$&(/(5$&,21(6
T EMA 2:
EMA 2: ICO
ANÁL ISI ST CINEMÁT
ANÁL I SISDCI
E NEMÁT I CO
D E PL ANOS
MECANI SMOS
MECANI SMOS PL ANOS
9(/2&,'$'(6<$&(/(5$&,21(6
(;3(5,0(17$/0(17(
(;3(5,0(17$/0(17(
'(7(50,1$&,Ð1'('(63/$=$0,(1726
'(7(50,1$&,Ð1'('(63/$=$0,(1726
9(/2&,'$'(6<$&(/(5$&,21(6
9(/2&,'$'(6<$&(/(5$&,21(6
$1$/Ì7,&$0(17(
$1$/Ì7,&$0(17(
3250(',2'(&20387$'25
3250(',2'(&20387$'25
T EMA 3:
EMA 3: ICA
SÍ NT ESI STCINEMÁT
SÍ NT ESISDCI
E NEMÁT I CA
E
MECANIDSMOS
MECANI SMOS
6Ì17(6,6<6,08/$&,Ð1&,1(0É7,&$
6Ì17(6,6<6,08/$&,Ð1&,1(0É7,&$
'(0(&$1,6026
'(0(&$1,6026
325&20387$'25
325&20387$'25
T EMA 6:
T EMA
6:
MECANI
SMOS
MECANI
D E CONT ACT O SMOS
D I R ECT O:
D E CONTL EVAS
ACT O D I R ECT O:
L EVAS
0(&$1,6026
0(&$1,6026
'(&217$&72',5(&72
'(&217$&72',5(&72
/(9$6
/(9$6
T EMA 7:
T EMA
7:
MECANI
SMOS
MECANI
SMOS
D E CONT ACT O D I R ECT O:
D E CONT
O D I R ECT O:
ENGRACT
ANAJES
ENGR ANAJES
(1*5$1$-(6
(1*5$1$-(6
<
<
75(1(6'((1*5$1$-(6
T EMA 8:
T R ENES D ET EMA
ENGR8:ANAJES
T R ENES D E ENGR ANAJES
75(1(6'((1*5$1$-(6
Figura 0.2 - Distribución del Programa de Prácticas de Laboratorio.
Las prácticas de laboratorio se realizarán en grupos no muy numerosos
(diez o doce personas) y el tiempo estimado para la realización de cada práctica
(1 hora, aproximadamente) parte una serie de supuestos: el alumno dispone de
un guión previo de la práctica que va a realizar, los equipos a utilizar en el
laboratorio están listos para su utilización inmediata, y la presentación de los
resultados - cuando los hubiere - se llevará a cabo fuera del laboratorio.
- 0.18 -
 0
0
Anuncio
Documentos relacionados


Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados