TESIS DE MAESTRÍA EN CIENCIAS “Análisis Dinámico
Anuncio

Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingeniería Electrónica
TESIS DE MAESTRÍA EN CIENCIAS
“Análisis Dinámico del Convertidor Elevador Puente
Completo Aislado con Sujetador Activo”
presentada por
Gisela Morales Amaro
como requisito para la obtención de grado de:
Maestría en Ciencias en Ingeniería Electrónica
Director de tesis:
Dr. Carlos Aguilar Castillo
Cuernavaca, Morelos, México.
27 de junio de 2008
Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingeniería Electrónica
TESIS DE MAESTRÍA EN CIENCIAS
“Análisis Dinámico del Convertidor Elevador Puente
Completo Aislado con Sujetador Activo”
presentada por
Gisela Morales Amaro
como requisito para la obtención de grado de:
Maestría en Ciencias en Ingeniería Electrónica
Director de tesis:
Dr. Carlos Aguilar Castillo
Jurado:
Dr. Mario Ponce Silva - Presidente
Dr. Jesús Aguayo Alquicira - Secretario
Dr. Carlos Aguilar Castillo - Vocal
Cuernavaca, Morelos, México.
27 de junio de 2008
Dedicatoria
A Dios, por darme la capacidad para afrontar la vida y la oportunidad de vivir en
este tiempo compartiendo con las personas que amo.
A mis padres, gracias por apoyarme en todo momento y por estar siempre conmigo,
su amor me ha enseñado a ser mejor persona, son la motivación que hace posible lograr
mis metas.
A Arnoldo Pacheco Alamos, gracias por ser como eres, tu cariño, paciencia y confianza han sido muy importantes en mi vida.
A mis hermanos y amigos, por estar al pendiente de mi.
Agradecimientos
A mi asesor, Dr. Carlos Aguilar Castillo, por brindarme su amistad y ayuda en el
desarrollo de este proyecto de tesis.
A mis revisores, Dr. Mario Ponce Silva, Dr. Jesús Aguayo Alquicira, por su amistad
e invaluables comentarios.
A mis profesores: Dr. Jorge Hugo Calleja, M.C. José Martín Gómez, Dr. María Cotorogea, Dr. Alejandro Rodríguez, Abraham Claudio Sánchez y Dr. Marco Oliver, Gerardo
Vela por sus enseñanzas y por ayudarme en mi formación profesional.
A mis hermanos Mauricio, Manuel, Leonel, Esther, Valdemar por estar siempre conmigo, cuidarme y quererme mucho. Agradezco a mis cuñadas y sobrinos por darme su
cariño.
A mis compañeros de generación: Eder, Dana Luz, Miguel Angel, Jorge Luis, Diego,
Eusebia, Omar, Isaura, Francisco, Ronay, Ivàn, Margarito, Eduardo, Madrid, Ruben, Benedicto, Josefa, Cornelio, Nacho. A los compañeros de otras generaciones: Marcos Alonso,
Mateos, Pacheco, Marving, Rosendo, César A, Alfonso, Pitta, Gracia, Alejandro, Olmos,
Pedro, Adriana, Marco Blanco, Jazmin, Adriana, Guillermo, Ovando, René, Uribe, Edna,
Sourcia, Molina gracias por brindarme su amistad y su ayuda a lo largo de la maestría.
Agradezco a la familia Estrada Serrano por brindarme su amistad y cariño, gracias
por estar siempre al pendiente de mí. Gracias Doña Tere y Don Manuel por hacer de
mis dias agradables en Cuernavaca y demostrarme su amor y confianza.
A la familia Aguilar Domínguez por su amistad y por el apoyo que me dieron durante
la realización de mis estudios de maestría. A la señora Graciela Domínguez Ubieta y
Carlos Daniel por darme su cariño y su amistad incondicional.
A la familia Alamos Fernandez y familia Amaro Estrada por sus sabios consejos,
cariño y les agradezco sus atenciones.
A mis mejores amigos Dana Luz Gonzalez Ojeda y Eder Gonzalez Toy, quienes me
dieron su apoyo y estuvieron conmigo siempre, cada minuto a su lado es agradable e
inolvidable.
A la Lic. Rosa Olivia Maquinay, Anita, Mayra, Mario Moreno por su trato amable
y ser atentos en todo momento. Al Ing. José Trinidad Bautista por su amistad y valiosos
consejos.
A todas aquellas personas que hicieron agradable mi estancia dentro y fuera del
CENIDET, especialmente a Tahamara.
Al centro nacional de investigación y desarrollo tecnológico (CENIDET), por brindarme la oportunidad de crecer profesionalmente.
Al consejo nacional de ciencia y tecnología (CONACYT) y a la dirección general
de educación superior tecnológica (DGEST), por el apoyo económico que me permitió
concluir mis estudios.
Análisis Dinámico del Convertidor Elevador Puente
Completo Aislado con Sujetador Activo
Autor
Gisela Morales Amaro
(RESUMEN)
En esta tesis se presenta el análisis en pequeña señal del convertidor elevador puente
completo aislado con sujetador activo. El documento incluye una revisión de las técnicas
de modelado como son: variables de estado promediado, interruptor de tres terminales
(PWM Switch), método de la función descriptiva y extendida. Este análisis se realiza
para determinar la técnica a emplear para realizar el modelo del convertidor.
Como el objetivo principal del modelo es proporcionar la información necesaria para
diseñar el controlador entonces se utiliza la técnica de variables de estados promediados.
Para ello se proponen circuitos simplificados equivalentes para cada uno de los estados
del funcionamiento del convertidor, que son válidos desde el punto de vista de modelado.
El resultado es un conjunto de ecuaciones (o bien un circuito) lineales y continuas, a
partir de las cuales se pueden obtener las características dinámicas del convertidor.
El documento presenta las funciones de transferencia de audio susceptibilidad, control - salida, variables de estado - control e impedancia de entrada. El resultado muestra
que el sistema es de cuarto orden, sin embargo, el diseño en estado estable hace que dos
de los polos se encuentren en alta frecuencia, y entonces el convertidor se comporta como un sistema de segundo orden. El factor de amortiguamiento del convertidor es bajo,
provocando sobre tiros considerables. En el análisis de parámetros realizado se encontró
que el capacitor del sujetador afecta directamente en el amortiguamiento. A mayor valor
de capacitor del sujetador, menor factor de amortiguamiento, aunque el valor alto del capacitor reduce los esfuerzos de tensión en los semiconductores y elementos pasivos. Esto
es, existe un fuerte compromiso entre los esfuerzos y el factor de amortiguamiento.
El documento también muestra la comparación de los resultados de la respuesta en
pequeña señal obtenidos mediante el modelo encontrado con los que se obtienen por simulación y experimentales. Los resultados concuerdan bien hasta la mitad de la frecuencia
de conmutación. Esto resulta aceptable para el diseño del controlador.
Dynamic Analysis of the Isolated Active Clamp
Full-Bridge Boost Converter
Author
Gisela Morales Amaro
(ABSTRACT)
This thesis presents the dynamic analysis of the isolated active - clamp full - bridge
boost converter. The document include a brief review of modeling techniques, such as:
state space averaging, PWM switch, describing function method and the extended describing function method. Based on this analysis it is possible to decide the appropriate
technique to get out the small - signal characteristics.
State space averaging technique provides enough information as well as precision;
while the main purpose of the model is to design the controller. So, in this thesis, the
state space averaging technique is used for getting the model. For modeling purpose,
simplified equivalent circuits are proposed. The results are a set of linear and continuous
equations through those the dynamics features of the converter are obtained.
The document presents the next transfer functions: audio susceptibility, control to
output, state variable to control and input impedance. This transfer functions provide
the complete information for design the controller. According to these results, the isolated active - clamp full - bridge boost converter is a four order system. However, two
poles are located in high frequency, so, actually, the converter behavior is like a second
order system. The damping factor of the converter is low, so the overshoot is considerable. The clamping capacitor is the main element which affects the damping: at higher
clamping capacitor values, lower damping factor. But higher clamping capacitor values
reduce electrical stresses on both semiconductors and passives elements. That is, a strong
compromise exits between electrical stresses and damping factor.
The document also presents a comparison among the small signal results obtained
from the analytical model, the experimental and the simulated ones. The results match
very well until the half frequency. However, this precision is sufficient for the controller
design.
Contenido
Notación
v
Lista de figuras
ix
Lista de tablas
xiii
1. Introducción
1
1.1. Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.2. Importancia del modelado del convertidor elevador puente completo aislado con sujetador activo (ACFBC). . . . . . . . . . . . . . . . . . . . . . .
2
1.3. Estado del arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.3.1. Métodos de Modelado y Simulación. . . . . . . . . . . . . . . . .
3
1.3.2. Variables de Estado Promediado. . . . . . . . . . . . . . . . . . .
3
1.3.3. Modelo de tres terminales (Interruptor PWM). . . . . . . . . . . .
5
1.3.4. Función Descriptiva (Describing Function Method ). . . . . . . . .
7
i
Contenido
1.3.5. Función Descriptiva extendida (Extended Describing Function Method ). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.3.6. Comparación de los métodos de modelado . . . . . . . . . . . . .
11
1.3.7. Extracción de características en pequeña señal mediante simulación. 12
1.4. Planteamiento del problema . . . . . . . . . . . . . . . . . . . . . . . . .
15
1.5. Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
1.6. Alcances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2. Convertidor elevador puente completo aislado con sujetador activo
2.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
2.2. Funcionamiento del convertidor . . . . . . . . . . . . . . . . . . . . . . .
18
2.2.1. Principales formas de onda . . . . . . . . . . . . . . . . . . . . . .
18
2.2.2. Estados de conducción . . . . . . . . . . . . . . . . . . . . . . . .
20
2.2.3. Criterios de Diseño . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3. Análisis en pequeña señal del convertidor ACFBC.
ii
17
29
3.1. El método de variables de estado promediado. . . . . . . . . . . . . . . .
29
3.2. Ecuaciones de estado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
3.3. Promediado de las matrices de estado y ganancia en CD. . . . . . . . . .
38
3.4. Análisis en CD: Modelo de CD del ACFBC. . . . . . . . . . . . . . . . .
42
3.5. Análisis en CA (small signal ). . . . . . . . . . . . . . . . . . . . . . . . .
43
3.6. Funciones de transferencia . . . . . . . . . . . . . . . . . . . . . . . . . .
45
3.6.1. Entrada-salida. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
3.6.2. Control-salida.
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
3.6.3. Impedancia de entrada. . . . . . . . . . . . . . . . . . . . . . . . .
48
3.6.4. Variables de estado-control. . . . . . . . . . . . . . . . . . . . . .
49
Contenido
4. Características en pequeña señal mediante simulación.
4.1. Funciones de transferencia mediante simulación y comparación.
51
. . . . .
51
4.1.1. Función de transferencia entrada-salida . . . . . . . . . . . . . . .
52
4.2. Función entrada-salida utilizando el programa PSIM . . . . . . . . . . . .
57
4.2.1. Impedancia de entrada . . . . . . . . . . . . . . . . . . . . . . . .
59
4.2.2. Función de transferencia control-salida . . . . . . . . . . . . . . .
61
4.2.3. Variables de estado con respecto al ciclo de trabajo . . . . . . . .
62
4.2.4. Respuesta al escalón de entrada, teórico-simulación. . . . . . . . .
65
4.3. Respuesta del convertidor ACFBC con variación en los parámetros de diseño. 74
4.3.1. Respuesta al escalón de entrada con variaciones en Cs . . . . . . .
75
4.3.2. Funciones de transferencia con variaciones en Cs . . . . . . . . . .
76
4.3.3. Función de transferencia con variaciones en Lik
78
. . . . . . . . . .
5. Conclusiones generales y trabajos futuros
81
5.1. Conclusiones generales . . . . . . . . . . . . . . . . . . . . . . . . . . . .
81
5.2. Trabajos futuros
83
Referencias
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
iii
Contenido
iv
Notación
α
β
∆
ωs
∅
Ā
Ā1
Ā2
Ā3
Ā4
B̄
B̄1
B̄2
B̄3
B̄4
C̄
C̄1
C̄2
C̄3
Co
Cs
d
dˆ
d¯1
d¯2
D
Intervalo de tiempo en la corriente del corriente del primario.
Intervalo de descarga de la corriente del primario.
Amplitud de la zona muerta.
Frecuencia angular de la conmutación.
Desplazamiento de fase de la componente armónica fundamental de la salida.
Matriz de coeficientes de estado promediado.
Matriz de coeficientes de los estados durante el tiempo de encendido.
Matriz de coeficientes de los estados durante el tiempo de apagado.
Matriz de coeficientes de los estados durante el tiempo de descarga.
Matriz de coeficientes de los estados durante el tiempo de muerto.
Matriz de coeficientes de fuentes promediado.
Matriz de coeficientes de las fuentes durante el tiempo de encendido.
Matriz de coeficientes de las fuentes durante el tiempo de apagado.
Matriz de coeficientes de las fuentes durante el tiempo de descarga.
Matriz de coeficientes de las fuentes durante el tiempo muerto.
Matriz de salida promediado.
Matriz de salida en el tiempo 1.
Matriz de salida en el tiempo 2.
Matriz de salida en el tiempo 3.
Capacitor de salida.
Capacitor sujetador.
Ciclo de trabajo con componentes de CD y CA.
Ciclo de trabajo perturbado.
Ciclo de trabajo durante el tiempo de descarga.
Ciclo de trabajo durante el tiempo muerto.
Componente de CD del ciclo de trabajo.
v
Notación
²
Fkss
Fs
Ia
iˆa
Ic
iˆc
IL
ILik
k
K,K1 ,K2
Lik
Lin
Lm
M
n
N
Re
RL
S
Ts
u1
u10
ū
û
Ū
Ū0
vˆac
Vap
vˆap
VCo
Vcp
vˆcp
VCs
VD
Vin
Vo
Vmodel
Vsim
vi
Error relativo.
Coeficiente de Fourier en estado estable.
Frecuencia de conmutación.
Corriente en la terminal activa del interruptor PWM.
Corriente perturbada en la terminal activa.
Corriente en la terminal común del interruptor PWM.
Corriente perturbada en la terminal común.
Corriente en el inductor de entrada.
Corriente en la inductancia de dispersión.
k-ésimo elemento.
indican las pendientes de las rectas.
Inductancia de dispersión.
Inductancia de entrada.
Inductancia magnetizante.
Ganancia de voltaje.
Relación de vueltas en el transformador.
función descriptiva.
Resistencia equivalente.
Resistencia de carga.
Amplitud de saturación.
Periodo de conmutación.
Fuente de entrada.
componente de CD de la fuente de entrada.
Fuente de entrada.
Fuente de entrada perturbada.
Componente de CD de la fuente de entrada.
Entrada en estado estable.
Voltaje perturbado entre las terminales activa y común.
Voltaje entre las terminales activa y pasiva.
Voltaje perturbado entre las terminales activa y pasiva.
Voltaje en el capacitor de salida.
Voltaje entre las terminales común y pasiva.
Voltaje perturbado entre las terminales común y pasiva.
Voltaje en el sujetador activo.
Voltaje.
Voltaje de entrada.
Voltaje de salida.
Valor del modelo.
Valor del simulador.
Notación
x1
x2
x3
x4
x10
x20
ẋ
x̄
xˆ1
xˆ2
x̂k
x̂m
X
ss
Xm
χ
Y1
Variable de estado 1.
Variable de estado 2.
Variable de estado 3.
Variable de estado 4.
Componente de CD de la variable de estado 1.
Componente de CD de la variable de estado 2.
Variable de estado promediado.
vector de variable de estado.
Variable de estado 1 perturbada.
Variable de estado 2 perturbada.
vector de estado perturbado.
vector de estado bajo modulación perturbado.
Componente de CD de la variable de estado.
Vector de estado bajo modulación en estado estable.
Amplitud de la senoide de entrada.
Amplitud de la componente armónica fundamental de la salida.
Acrónimos
ACFBC
CA
CD
PWM
ZCS
ZVS
Convertidor elevador puente completo aislado con sujetador activo.
Corriente alterna.
Corriente directa.
Modulación por ancho de pulso.
Conmutación a Corriente Cero.
Conmutación a Voltaje Cero.
vii
Notación
viii
Lista de figuras
1.1. Modelo de CD en MCC
. . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2. Modelo en pequeña señal en MCC
5
. . . . . . . . . . . . . . . . . . . . .
6
1.3. Modelo en CD para MCD . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.4. Modelo de pequeña señal en MCD . . . . . . . . . . . . . . . . . . . . . .
7
1.5. Tres características no lineales y sus funciones descriptivas [8]. . . . . . .
9
1.6. Espectro del convertidor conmutado bajo modulación de pequeña señal .
10
1.7. Comparación entre el modelo de estados promediados y el software SIMPLIS [21]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
2.1. Convertidor ACFBC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
2.2. Principales formas de onda. . . . . . . . . . . . . . . . . . . . . . . . . .
19
2.3. Circuito equivalente durante el periodo t < t0 . . . . . . . . . . . . . . . .
20
2.4. Circuito equivalente durante el periodo t0 < t < t1 . . . . . . . . . . . . .
21
2.5. Circuito equivalente durante el periodo t1 < t < t2 . . . . . . . . . . . . .
22
2.6. Circuito equivalente durante el periodo t2 < t < t3 . . . . . . . . . . . . .
22
ix
Lista de figuras
x
2.7. Circuito equivalente durante el periodo t3 < t < t4 . . . . . . . . . . . . .
23
2.8. Circuito equivalente durante el periodo t4 < t < t5 . . . . . . . . . . . . .
23
2.9. Ganancia de voltaje en función del ciclo de trabajo. . . . . . . . . . . . .
25
2.10. Formas de onda del intervalo ZVS. . . . . . . . . . . . . . . . . . . . . .
27
2.11. Corriente rms en un interruptor del puente completo. . . . . . . . . . . .
28
3.1. Circuito simplificado del convertidor ACFBC. . . . . . . . . . . . . . . .
30
3.2. Formas de onda ideales del convertidor ACFBC. . . . . . . . . . . . . . .
31
3.3. Circuitos equivalentes del convertidor ACFBC . . . . . . . . . . . . . . .
33
(a).
Intervalo t0 a t1 . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
(b).
Intervalo t1 a t2 . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
(c).
Intervalo t2 a t3 . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
3.4. Ganancia de voltaje en función del ciclo de trabajo. . . . . . . . . . . . .
41
3.5. Circuito equivalente no lineal continuo. . . . . . . . . . . . . . . . . . . .
43
3.6. Circuito de CD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
3.7. Circuito equivalente híbrido en pequeña señal. . . . . . . . . . . . . . . .
45
4.1. Circuito simulado en SIMetrix/SIMPLIS con MOSFETs. . . . . . . . . .
53
4.2. Circuito simulado en SIMetrix/SIMPLIS con interruptores ideales. . . . .
53
4.3. Función entrada-salida obtenida con SIMPLIS y el Modelo promediado. .
54
4.4. Error relativo para la ganancia entre SIMPLIS y el Modelo promediado. .
55
4.5. Error relativo para la fase entre SIMPLIS y el Modelo promediado. . . .
55
4.6. Circuito simulado en SIMPLIS incluyendo la inductancia magnetizante. .
56
4.7. Función entrada-salida con inductancia de dispersión y magnetizante. . .
57
4.8. Circuito implementado en PSIM. . . . . . . . . . . . . . . . . . . . . . .
58
4.9. Gráfica de magnitud y fase en PSIM. . . . . . . . . . . . . . . . . . . . .
58
Lista de figuras
4.10. Circuito simulado en SIMetrix/SIMPLIS con MOSFETs para obtener la
impedancia de entrada. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
4.11. Circuito simulado en SIMetrix/SIMPLIS con interruptores ideales para
obtener la impedancia de entrada. . . . . . . . . . . . . . . . . . . . . . .
60
4.12. Impedancia de entrada obtenida con SIMPLIS y el Modelo promediado. .
60
4.13. Función control-salida obtenida con SIMPLIS y el Modelo promediado. .
61
4.14. Función corriente de entrada - control. . . . . . . . . . . . . . . . . . . .
62
4.15. Función voltaje del capacitor sujetador - control. . . . . . . . . . . . . . .
63
4.16. Función corriente de la inductancia de dispersión - control. . . . . . . . .
64
4.17. Función voltaje del capacitor de salida - control. . . . . . . . . . . . . . .
64
4.18. Diagrama a bloques de la función de entrada-salida en Simulinkr. . . . .
65
4.19. Convertidor ACFBC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
4.20. Circuito con escalón de entrada en SIMPLIS. . . . . . . . . . . . . . . . .
66
4.21. Circuito interruptor electrónico . . . . . . . . . . . . . . . . . . . . . . .
66
4.22. Circuito de conmutación . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
4.23. Respuesta al escalón de entrada de 5 volts. . . . . . . . . . . . . . . . . .
67
4.24. Error para un escalón de entrada de 5 volts. . . . . . . . . . . . . . . . .
68
4.25. Respuesta al escalón de entrada de 10 volts. . . . . . . . . . . . . . . . .
68
4.26. Respuesta al escalón de entrada de 15 volts. . . . . . . . . . . . . . . . .
69
4.27. Error para un escalón de entrada de 10 volts. . . . . . . . . . . . . . . . .
69
4.28. Error para un escalón de entrada de 15 volts. . . . . . . . . . . . . . . . .
70
4.29. Respuesta al escalón de entrada de 20 volts. . . . . . . . . . . . . . . . .
70
4.30. Error para un escalón de entrada de 20 volts. . . . . . . . . . . . . . . . .
71
4.31. Respuesta al escalón de entrada de 25 volts. . . . . . . . . . . . . . . . .
71
4.32. Error para un escalón de entrada de 25 volts. . . . . . . . . . . . . . . . .
72
4.33. Respuesta al escalón de entrada de 30 volts. . . . . . . . . . . . . . . . .
72
xi
Lista de figuras
xii
4.34. Error para un escalón de entrada de 30 volts. . . . . . . . . . . . . . . . .
73
4.35. Respuesta al escalón de entrada de 48 volts. . . . . . . . . . . . . . . . .
74
4.36. Respuesta al escalón para diferentes valores de Cs . . . . . . . . . . . . . .
75
4.37. Respuesta al escalón para diferentes valores de Lik . . . . . . . . . . . . .
76
4.38. Función E/S para diferentes valores de Cs . . . . . . . . . . . . . . . . . .
77
4.39. Función de impedancia de entrada para diferentes valores de Cs . . . . . .
77
4.40. Función control salida para diferentes valores de Cs . . . . . . . . . . . . .
78
4.41. Función E/S para diferentes valores de Lik . . . . . . . . . . . . . . . . . .
79
4.42. Función control-salida para diferentes valores de Lik . . . . . . . . . . . .
79
Lista de tablas
3.1. Resumen de Ecuaciones de Estado . . . . . . . . . . . . . . . . . . . . . .
37
4.1. Especificaciones eléctricas . . . . . . . . . . . . . . . . . . . . . . . . . .
52
xiii
Lista de tablas
xiv
Capítulo 1
Introducción
En este capítulo se muestra la importancia del análisis del modelado de convertidores
conmutados, así como el planteamiento del problema, objetivos, alcances referentes al
tema de tesis y una revisión de los métodos de modelado.
1.1.
Antecedentes
La búsqueda de sistemas de alimentación con altas prestaciones es una constante en
todas las investigaciones en el campo de la electrónica de potencia; entre ellas cabe resaltar
características como: alta eficiencia y alta densidad de potencia. Una de las tendencias
para aumentar la densidad de potencia es la utilización de convertidores conmutados en
alta frecuencia, pero además, se deben emplear técnicas de ayuda a la conmutación para
reducir las pérdidas y así obtener una buena eficiencia en el convertidor.
Los convertidores son sistemas no lineales, discretos y variantes en el tiempo; estas
características hacen que el análisis de los convertidores conmutados sea sumamente
complejo, y ha propiciado la respuesta de distintas técnicas para la obtención de los
modelos [1]; dependiendo de las técnicas de modelado se puede representar con mayor
o menor precisión la dinámica del convertidor. El modelo obtenido sirve para diseñar
algoritmos de control con la finalidad de estabilizar y mejorar el funcionamiento dinámico
del sistema de alimentación.
1
1. Introducción
1.2.
Importancia del modelado del convertidor elevador puente completo aislado con sujetador activo
(ACFBC).
Hoy en día existen un gran número de topologías, cada una posee algunas características que lo hacen ideal para ciertas aplicaciones. Para mejorar el diseño del sistema es
necesario tomar en cuenta ciertos parámetros como: las pérdidas de potencia, la optimización de los componentes del sistema de alimentación, etc. Adicional a esto es necesario
conocer el modelo en pequeña señal del sistema para mejorar el desempeño y cumplir
con los requerimientos de regulación.
Los convertidores CD-CD empleados como acondicionadores de potencia requieren
responder adecuadamente a variaciones en la carga, para ello es necesario conocer su
respuesta en frecuencia por medio del análisis en pequeña señal. Modelar permite especificar el comportamiento de un sistema, además proporciona patrones que nos ayudaran
a la construcción del mismo y posteriormente documentar decisiones que adoptemos a lo
largo del diseño.
El convertidor elevador puente completo aislado con sujetador activo (ACFBC) es
una topología muy atractiva, pues permite alcanzar niveles de eficiencia muy altos con
baja tensión de entrada. La ventaja que presenta este convertidor es que la corriente de
entrada es continua (no pulsante), lo que es ideal para el caso de alimentación de entrada
con una celda de combustible o con baterías [2].
En la literatura [2], [3], [4] y [5] se pueden encontrar estudios que explican el modo
de operación del convertidor ACFBC en estado estable y en base a esta información se
diseña la etapa de potencia, pero no existen modelos en pequeña señal que describan
la evolución del sistema ante diferentes condiciones; por ejemplo, pequeñas variaciones o
disturbios en el voltaje de entrada, en la señal de control, etc, por eso es necesario obtener
el análisis de pequeña señal que describa el comportamiento del convertidor.
Para aumentar la velocidad de respuesta dinámica del convertidor se requiere extender al máximo el ancho de banda, sin caer en inestabilidades. Por esta razón es indispensable obtener modelos que describan las características en pequeña señal del convertidor.
2
1.3. Estado del arte
1.3.
1.3.1.
Estado del arte
Métodos de Modelado y Simulación.
Las dos técnicas que se utilizan comúnmente para el modelado de convertidores
conmutados son: variables de estados promediados y el modelo del interruptor PWM.
Está última en realidad surge de aplicar la técnica de variables de estado promediado a
la parte no lineal de los convertidores y resulta un modelo útil y simple de emplear para
propósitos de simulación y que además se puede extender al análisis teórico. Aunque
tiene la particularidad de que deben existir ciertas condiciones para poder emplearlo.
Sin embargo, existen otras técnicas para el modelado de convertidores reportadas en la
literatura. A continuación se describe brevemente algunas de estas técnicas.
1.3.2.
Variables de Estado Promediado.
Es una técnica de análisis dinámico que aproxima el comportamiento de un convertidor conmutado a un sistema lineal y continuo [6]. El modelo de variables de estado
promediado fue desarrollado por R. D. Middlebrook y Slobodan Cuk en 1976, partiendo
del método de circuitos promediados [7] (ecuación promediada propuesta, ver ecuación
1.1). Las ecuaciones generadas de los circuitos se convierten en un sistema matricial de
variables de estado (las variables de estado de un sistema dinámico son las que forman
el conjunto más pequeño de variables que determinan el estado del sistema dinámico [8],
que facilita su manipulación y extensión.
Variables de estado promediado es un método aplicable a convertidores controlados
por ciclo de trabajo (convertidores PWM ), no obstante se han reportado técnicas para
extender este tipo de análisis a convertidores controlados por frecuencia (resonantes) [9].
De los inconvenientes que tiene este método, podemos mencionar que su análisis resulta
tedioso, ya que es necesario realizar todo el procedimiento para cualquier modificación
(incluir parásitos por ejemplo).
Este método es una combinación de análisis matemático y representación eléctrica
del convertidor (circuito equivalente); esto permite obtener las funciones de transferencia
al redibujar los circuitos adecuados para la evaluación particular que se deseé.
3
1. Introducción
La ecuación fundamental que representa la dinámica del sistema es [7]:
ẋ = Āx̄ + B̄ ū
(1.1)
donde:
ẋ
Ā
x̄
B̄
ū
Variable de estado promediado.
Matriz de coeficientes de estado promediado.
vector de variable de estado.
Matriz de coeficientes de fuentes promediado.
Fuente de entrada.
En modo de conducción continua, para convertidores modulados por anchura de los
pulsos, la ecuación que rige la dinámica del convertidor es:
ẋ = [Ā1 d + Ā2 (1 − d)]x̄ + [B̄1 d + B̄2 (1 − d)]ū
(1.2)
donde:
Ā1
Ā2
B̄1
B̄2
d
Matriz de coeficientes
Matriz de coeficientes
Matriz de coeficientes
Matriz de coeficientes
Ciclo de trabajo.
de
de
de
de
los
los
las
las
estados durante el tiempo de encendido.
estados durante el tiempo de apagado.
fuentes durante el tiempo de encendido.
fuentes durante el tiempo de apagado.
Si el convertidor opera en modo de conducción discontinuo, la dinámica del convertidor es diferente; en una situación así, la ecuación que determina la dinámica del
convertidor es:
ẋ = [Ā1 d + Ā3 d2 + Ā4 (1 − d1 − d2 )]x̄ + [B̄1 d + B̄3 d2 + B̄4 (1 − d1 − d2 )]ū
donde:
Ā1
Ā3
Ā4
B̄1
B̄3
B̄4
d¯1
d¯2
4
Matriz de coeficientes de los estados durante el tiempo de encendido.
Matriz de coeficientes de los estados durante el tiempo de descarga.
Matriz de coeficientes de los estados durante el tiempo de muerto.
Matriz de coeficientes de las fuentes durante el tiempo de encendido.
Matriz de coeficientes de las fuentes durante el tiempo de descarga.
Matriz de coeficientes de las fuentes durante el tiempo muerto.
Ciclo de trabajo durante el tiempo de descarga.
Ciclo de trabajo durante el tiempo muerto.
(1.3)
1.3. Estado del arte
La técnica de variable de estado promediado es una herramienta útil, que sirve
para representar de manera simple y aproximada el modelo en pequeña señal de los
convertidores PWM [10].
1.3.3.
Modelo de tres terminales (Interruptor PWM).
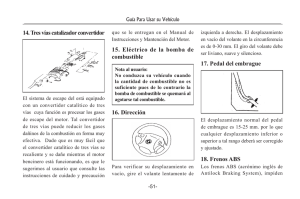
Vatché Vorperian introdujo el concepto del interruptor PWM en los 90’s, donde demuestra que existen relaciones de invariancia en cuanto a tensión y corriente entre las
terminales, activa, común y pasiva (a-c-p). Vorperian adoptó dos diferentes configuraciones: para el modo de operación continuo (MCC) y para el modo de operación discontinuo
(MCD). Las figuras 1.1 y 1.2 muestran el modelo de CD y de pequeña señal, respectivamente, para cuando se opera en MCC. Así también se muestran las ecuaciones que
representan al modelo [11].
DD’Re
c
a
+
-
D
1
p
Figura 1.1: Modelo de CD en MCC
Las ecuaciones que describen al modelo de la figura 1.1 del interruptor PWM son:
Ia = D · Ic
(1.4)
Vcp = D · Vap − Re · Ic · D · (1 − D)
(1.5)
donde:
Ia
D
Ic
Vcp
Vap
Re
Corriente en la terminal activa del interruptor PWM.
Componente de CD del ciclo de trabajo.
Corriente en la terminal común del interruptor PWM.
Voltaje entre las terminales común y pasiva.
Voltaje entre las terminales activa y pasiva.
Resistencia equivalente.
5
1. Introducción
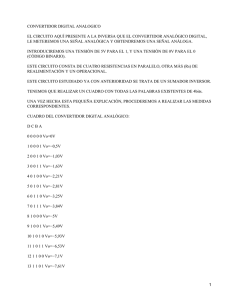
Enseguida se muestran las ecuaciones que describen al modelo en pequeña señal en
MCC de la figura 1.2
îa = Dîc + Ic dˆ
(1.6)
v̂cp = Dv̂ac + VD dˆ − Re D(1 − D)îc
(1.7)
VD = Vap + Re IcD − Re Ic(1 − D)
(1.8)
VD dˆ
D
a
DD’Re
-
I c dˆ
c
+
+
-
D
1
p
Figura 1.2: Modelo en pequeña señal en MCC
donde:
iˆa
iˆc
vˆac
vˆap
vˆcp
VD
dˆ
Corriente perturbada en la terminal activa.
Corriente perturbada en la terminal común.
Voltaje perturbado entre las terminales activa y común.
Voltaje perturbado entre las terminales activa y pasiva.
Voltaje perturbado entre las terminales común y pasiva.
Voltaje.
Ciclo de trabajo perturbado.
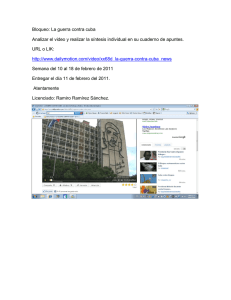
Una vez identificados los puntos a-c-p en el convertidor a analizar, simplemente se
introduce el modelo. En las figuras 1.3 y 1.4 se muestran los modelos del interruptor
PWM para el MCD [12].
El modelo del interruptor PWM es versátil debido a que puede ser utilizado en
cualquier topología, sólo es necesario identificar las terminales a-c-p. Al ser invariante el
interruptor de tres terminales, en cualquier topología PWM, es posible modelar únicamente a éste e integrarlo al convertidor que se esté analizando [11]. Sin embargo, si no se
6
1.3. Estado del arte
a
c
ip
ia
µ ⋅ ip
µ ⋅ vac
p
Figura 1.3: Modelo en CD para MCD
c
a
ˆ
g f vac
+
vˆac gi
ki dˆ
ko dˆ
-
-
go
vˆcp
+
p
Figura 1.4: Modelo de pequeña señal en MCD
pueden identificar las terminales del interruptor PWM , no es posible aplicar este método.
Esta técnica resulta de aplicar el método de variables de estado promediado, por lo tanto
tiene las mismas limitaciones: validez hasta la mitad de la frecuencia de conmutación,
debido a la linealización.
1.3.4.
Función Descriptiva (Describing Function Method ).
El método de la función descriptiva puede ser utilizado en convertidores conmutados
para generar modelos en pequeña señal en tiempo continuo, no solo para convertidores
PWM sino también para convertidores tipo resonantes [13].
En el análisis de la función descriptiva se supone que sólo la componente armónica
fundamental es significativa. Tal premisa suele ser valida porque las componentes armónicas son de menor tamaño que la componente fundamental. Además la mayoría de los
sistemas de control contiene un filtro pasa bajas que rechaza las altas frecuencias.
La función descriptiva de un elemento no lineal, está definida como una relación
compleja entre la componente armónica fundamental de la salida respecto a la entrada y
está expresada como [8]:
7
1. Introducción
N=
Y1
∠φ
χ
(1.9)
donde:
N
Y1
χ
∅
función descriptiva.
Amplitud de la componente armónica fundamental de la salida.
Amplitud de la senoide de entrada.
Desplazamiento de fase de la componente armónica fundamental de la salida.
Si no hay un elemento que almacene energía dentro del elemento no lineal, entonces
N sólo es función de la amplitud de la entrada al elemento. Por otro lado, si se incluye
un elemento capaz de almacenar energía, entonces N es función de la amplitud y de la
frecuencia de entrada.
En la figura 1.5, se ven tres elementos no lineales y sus funciones descriptivas.A
continuación se proporcionan cálculos ilustrativos de funciones descriptivas de elementos
no lineales halladas comúnmente.
Para calcular la función descriptiva de un elemento no lineal, se necesita hallar la
componente fundamental de la salida; para ésto se hace uso de la serie de Fourier.
El análisis con la función descriptiva es una extensión de las técnicas lineales para
el estudio de los sistemas no lineales. Una ventaja de este método, es que el análisis no
resulta complicado para sistemas con dinámicas complejas en sus partes lineales.
La exactitud del análisis es mejor para sistemas de orden superior que para los de
orden inferior, porque los sistemas de orden superior tienen mejores características de
filtrado a bajas frecuencias.
Aunque el método de la función descriptiva es muy útil en la predicción de la estabilidad de sistemas no forzados, proporciona poca información respecto a características
de respuesta transitoria [14].
1.3.5.
Función Descriptiva extendida (Extended Describing Function Method ).
Este método propone una simplificación significativa en el trabajo previo sobre la
función descriptiva multi-variable para tratar las no linealidades de los circuitos. El método de la función descriptiva extendida propuesto en [15] se basa en el enfoque de balance
8
1.3. Estado del arte
Y
K2
K1
N = K2 +
S
Y
S2
2(K1 − K2 ) −1 S S
sen + 1− 2
X
π
X X
X
(X ≥ S)
K
M
N =k+
4M
πX
X
Y
k
∆
N =k−
∆
X
∆2
∆ (4 − 2k )∆
sen−1 +
1− 2
π
πX
X
X
2k
( X ≥ ∆)
Figura 1.5: Tres características no lineales y sus funciones descriptivas [8].
de armónicos de J. Groves [16], el cual tiene la capacidad de predecir la respuesta en
pequeña señal.
Como una extensión del método de variables de estado promediados, esta técnica
de modelado puede incorporar cualquier componente de Fourier para la exactitud de
un buen modelo y provee modelos de pequeña señal para topologías PWM y varias
topologías de conmutación suave resonantes. Con el empleo de este método de modelado,
la dinámica de los convertidores puede ser capturada con exactitud hasta la frecuencia
de conmutación [17].
El método de la función descriptiva extendida reduce la complejidad del modelo y
simplifica el procedimiento de implementación. Para explicar mejor la idea del modelado y
prevenir expresiones matemáticas complicadas, se asume que las componentes promediadas de las variables de estado promediado dominan el comportamiento dinámico. Por lo
tanto, sólo es necesario considerar las bandas laterales de los componentes promediados.
9
1. Introducción
UO
U -M
UM
-f m 0 f m
X -2N
X -N
X -M
XM
N=6
M=1
FS
frec
X 2N
XN
X N+M
iii
-2FS
-FS
-f m 0 f m
FS
F-2N
F-N
F-M
FM
FN
-FS
F0
-f m 0 f m
iii
-2FS
X 2N+M
2FS
FN+M
FS
iii
frec
F2N
F2N+M
2FS
iii
frec
Figura 1.6: Espectro del convertidor conmutado bajo modulación de pequeña señal
La figura 1.6 muestra el espectro en frecuencia típico de un convertidor PWM bajo
modulación [15]. En la gráfica se pueden apreciar las bandas laterales que se producen
sobre el voltaje de entrada, el vector de estado y los coeficientes de Fourier ; debido a la
perturbación de pequeña señal.
El modelo de pequeña señal invariante en el tiempo está dado por la forma general
de la función descriptiva extendida, ecuación 1.10:
dx̂k
+ jkωs x̂k =
dt
K
X
∂Fkss
∂Fkss
x̂
+
û,
m
ss
∂Xm
∂Uo
m=−K
k = 0, ±1, ±2, ......., ±K
donde:
Fkss
ss
Xm
x̂m
x̂k
ωs
k
K
Ū0
û
10
Coeficiente de Fourier en estado estable.
Vector de estado bajo modulación en estado estable.
vector de estado bajo modulación perturbado.
vector de estado perturbado.
Frecuencia angular de la conmutación.
k-ésimo elemento.
indican las pendientes de las rectas.
Entrada en estado estable.
Fuente de entrada perturbada.
(1.10)
1.3. Estado del arte
En resumen el método de la función descriptiva extendida presenta las siguientes
características [15]:
La limitación del modelo es que la frecuencia de modulación debe ser más baja que
la frecuencia de conmutación. Bajo esta condición las derivadas parciales definidas sobre
el periodo proporcional correspondiente pueden ser aproximadas por sus contrapartes
definidas sobre el ciclo de conmutación.
Para convertidores PWM, si sólo se consideran los componentes promediados, el
modelo de la función descriptiva extendida es equivalente al modelo de espacio de estado
promediado.
Por medio de la incorporación de algunos términos armónicos, el método de la función descriptiva extendida puede ser usado para modelar convertidores resonantes.
1.3.6.
Comparación de los métodos de modelado
La técnica de variable de estado promediado representa el comportamiento en pequeña señal de los convertidores conmutados en términos de un conjunto de ecuaciones
de estado lineales invariantes en el tiempo [10].
El modelo del interruptor PWM presenta una simplificación del análisis de convertidores CD-CD no lineales. El modelo del interruptor PWM representa sólo las características de CD y en pequeña señal en la parte no lineal del convertidor, el cual consiste
de los interruptores activo y pasivo [11].
El modelo de CD y en pequeña señal de un convertidor PWM se obtiene reemplazando el interruptor de tres terminales, por el modelo de circuito equivalente. Los resultados
obtenidos con las técnicas de variable de estado promediado y el interruptor PWM son
exactamente iguales [10].
Como se mencionó en la sección 1.3.3, para utilizar el modelo del interruptor PWM
es necesario tener el interruptor activo-pasivo presente en la topología que se va a estudiar,
de lo contrario no es posible aplicar el modelo. Para el convertidor ACFBC que es nuestro
caso de estudio no se tiene el interruptor de tres terminales, por esta razón se descarta
el uso de este modelo.
Los métodos de la función descriptiva y la función descriptiva extendida se utilizan
para modelar el componente no lineal de un sistema con buena exactitud. Estas técnicas
11
1. Introducción
se emplean con frecuencia para determinar la estabilidad de un sistema o para el modelado
de convertidores resonantes.
La técnica de variable de estado promediado describe las características en pequeña
señal de un convertidor conmutado de manera sencilla, por medio de matrices de estado
y ecuaciones de estado [10]. El convertidor ACFBC opera con un esquema PWM, por
esta razón se elige la técnica de variable de estado promediado para el modelado.
1.3.7.
Extracción de características en pequeña señal mediante
simulación.
Es posible obtener las características en pequeña señal por medio de programas de
computadora, existen varios paquetes para la simulación de circuitos electrónicos, la gran
mayoría simula el estado estable y el estado transitorio, pero sólo algunos cuantos realizan
simulación de la respuesta en frecuencia.
La simulación por software es una manera fácil de obtener resultados del comportamiento de un sistema. Además, se tiene un panorama de la variación de los parámetros
durante su ejecución.
Existen programas que permiten extraer características de pequeña señal, pero sus
ejecuciones pueden ser lentas. En esta sección se presenta una breve revisión de los programas: SIMPLIS, PSPICE, MATLAB-SIMULINK y PSIM.
c
SIMetrix/SIMPLIS 5.2 °
(Catena Software Ltd) realiza análisis en CA en pequeña
señal de modelos conmutados de una manera muy rápida. La forma como lo hace es
similar al protocolo utilizado por los equipos de medición, con la diferencia de que no
considera el rizo presente a la frecuencia de conmutación. Entonces, la función de transferencia simulada mediante SIMPLIS es casi la misma que la obtenida mediante equipos
de medición [18].
En la actualidad, el diseño y la implementación de un sistema eléctrico/electrónico
de potencia inicia con una etapa de estudio donde se analizan los aspectos generales de
diseño para después continuar con la simulación en una computadora personal. En la
simulación se logra conocer cuales son las características y condiciones del circuito para
garantizar su mejor desempeño [19].
Los simuladores PSpice y MATLAB-SIMULINKr , son programas que tienen grandes
prestaciones de simulación. Por un lado PSpice en el área eléctrica/electrónica y, por
12
1.3. Estado del arte
otra parte, MATLAB-SIMULINK con la posibilidad de simulación de cualquier tipo de
sistema.
PSpice se compone de seis programas: Editor gráfico de circuitos, Editor de circuitos
impresos, simulador analógico y digital, programa para crear modelos, programa para
optimizar el desempeño de circuitos analógicos y una herramienta de generación de estímulos analógicos y digitales. Técnicamente se puede comentar lo siguiente de acuerdo a
lo revisado [19]:
PSpice:
• Es un programa enfocado al cálculo de circuitos eléctricos/electrónicos, por lo que
no hay que modelar matemáticamente el circuito a simular.
• La ingeniería del programa presenta opciones al usuario para modificar parámetros
importantes de simulación tales como el número de iteraciones para encontrar la
convergencia.
• Presenta varios tipos de análisis: en CD (punto de operación), en CA (dominio de
la frecuencia), transitorio (dominio del tiempo), estadístico (Monte Carlo), paramétrico y desempeño (performance).
• Presenta un entorno gráfico fácil de utilizar.
MATLAB-SIMULINK:
•
•
•
•
•
Se pueden implementar con facilidad sistemas de ecuaciones de cualquier tipo.
Tiene facilidad para la implementación del control.
Se pueden manipular los datos con facilidad.
Cuenta con un gran número de métodos de integración numérica.
Cuenta con librerías en diversas áreas científicas, incluyendo una en el área de la
electrónica de potencia.
Específicamente PSIM es un paquete de simulación diseñado para la electrónica de
potencia y control de motores. PSIM proporciona una simulación rápida, debido a que
utiliza componentes ideales. Consiste en tres programas: programa de circuito esquemático PSIM, simulador de PSIM, y el programa de procesamiento de formas de onda
SIMVIEW1. Permite hacer análisis transitorios, análisis de ac, análisis de barrido paramétrico [20].
De forma general, los simuladores son un método rápido para extraer las características de pequeña señal en sistemas electrónicos, debido a que realizan una buena
aproximación del comportamiento de los dispositivos.
13
1. Introducción
Comparación de la respuesta en frecuencia del modelo de estados promediados
y el programa de simulación SIMPLIS.
El paquete SIMPLIS es un simulador de circuito diseñado para el modelado rápido de
sistemas de alimentación conmutados. La palabra SIMPLIS viene del acrónimo en inglés
“SIMulation for Piecewise LInear System”, es un paquete suministrado con la versión
Premium de SIMetrix.
SIMPLIS es un componente de nivel simulador como SPICE, pero típicamente suele
ser de 10 a 50 veces más rápido cuando se simulan circuitos conmutados. Se alcanza
esta velocidad para el modelado de dispositivos usando una serie de segmentos en línea
recta, en lugar de resolver ecuaciones no lineales como lo hace SPICE. Modelando los
dispositivos de esta manera, SIMPLIS puede caracterizar un sistema completo como una
secuencia cíclica de topologías de circuitos lineales; esto es una representación exacta
de un típico sistema de alimentación conmutada donde los dispositivos semiconductores
funcionan como interruptores [18].
A continuación se muestra la figura 1.7, que representa una comparación de la respuesta en frecuencia del modelo de estados promediados con el programa de simulación
SIMPLIS; donde se aprecia claramente que la simulación hecha en SIMPLIS es muy
parecida a la respuesta obtenida con el modelo.
Figura 1.7: Comparación entre el modelo de estados promediados y el software SIMPLIS [21].
14
1.4. Planteamiento del problema
En la figura 1.7 se muestra la respuesta en frecuencia calculada con el modelo promediado y la ganancia del lazo mediante el uso del programa SIMPLIS, de un convertidor
Buck a 1 Mhz con un control modo voltaje [21].
El resultado final es una aproximación, pero con simulaciones extremadamente rápidas, que permiten el modelado de topologías complejas que no son viable en SPICE.
1.4.
Planteamiento del problema
El convertidor elevador puente completo aislado con sujetador activo es una topología
con alta eficiencia y características sobresalientes que se requieren en los acondicionadores
de potencia para sistemas alimentados con batería.
El convertidor ACFBC debe mantener la regulación de voltaje dentro de las especificaciones, sin importar las variaciones en la carga o en el voltaje de entrada; para esto
debemos conocer su respuesta en frecuencia por medio de un análisis matemático que
describa su comportamiento.
Existen diferentes técnicas para el análisis en pequeña señal aplicadas en electrónica
de potencia, cada una presenta ciertas características. La aproximación a variables de
estado ha sido muy popular en los diseños de circuitos electrónicos de potencia. Con este
método el diseño puede fácilmente tratar con el comportamiento dinámico de un circuito
y evaluar su estabilidad.
En la actualidad no existe un modelo en pequeña señal del convertidor ACFBC. Con
el modelo se puede conocer la evolución del convertidor para diferentes condiciones y así
evitar la inestabilidad del sistema.
1.5.
Objetivo
El objetivo principal de la tesis es realizar el análisis en pequeña señal del convertidor
elevador puente completo aislado con sujetador activo. Con el modelo de pequeña señal
obtenido es posible diseñar un compensador de retroalimentación para el control en modo
tensión o en modo corriente.
15
1. Introducción
Como objetivos particulares se plantean los siguientes puntos:
• Revisión de las técnicas de modelado aplicados a convertidores conmutados.
• Realizar el modelado en pequeña señal del convertidor ACFBC.
• Obtener las características en pequeña señal por medio de simulación.
1.6.
Alcances
Dentro de los alcances principales de este trabajo de investigación:
• Obtener un modelo en pequeña señal del convertidor elevador puente completo
aislado con sujetador activo.
• Basado en el análisis del modelo se obtendrán funciones de transferencia que describen el comportamiento del convertidor elevador puente completo aislado con
sujetador activo. Con estas funciones sería posible diseñar el controlador adecuado.
• Obtener las características en pequeña señal mediante simulación, y comparación.
16
Capítulo 2
Convertidor elevador puente completo
aislado con sujetador activo
En este capítulo se muestran los fundamentos de la operación del convertidor ACFBC.
También se presentan las consideraciones y criterios empleados para optimizar la implementación.
2.1.
Introducción
En la figura 2.1 se muestra el esquema del ACFBC. Básicamente, el convertidor es
una estructura en puente completo que utiliza dos elementos magnéticos: un inductor en
la entrada y un transformador para aislamiento [3]. Adicionalmente, contiene un circuito
auxiliar, compuesto por el interruptor Ss y el capacitor Cs , los cuales tienen la función de
recuperar la energía que se almacena en la inductancia de dispersión del transformador
[4].
El circuito auxiliar además “sujeta” la tensión de operación de los interruptores
(active - clamp). Por otro lado, mediante la operación adecuada de las señales de disparo
de los interruptores S1 - S4 es posible conseguir conmutarlos a tensión cero.
17
2. Convertidor elevador puente completo aislado con sujetador activo
L
D1
S2
S1
Ds1
Cs1
Ds2
D2
Cs2
Cd1
Vin
Ss
Dss
Cd2
Co
Lik
Css
Ro
Lm
+
Cs
Vs
-
D3
D4
S4
S3
Ds3
Cs3
Ds4
Cs4
Cd3
Cd4
Figura 2.1: Convertidor ACFBC.
Las ventajas que ofrece el ACFBC son: Corrientes no pulsantes en la entrada. La posición del inductor de entrada (Lin ) permite, mediante el diseño en MCC, que la corriente
de entrada sea no pulsante.
Proporciona aislamiento. El transformador del convertidor proporciona aislamiento
entre la alimentación y la carga. Cabe señalar que la operación del transformador es en
alta frecuencia, por lo que el tamaño es reducido.
Bajos esfuerzos eléctricos en los interruptores de potencia. La incorporación de la red
activa de sujeción de tensión (active-clamp) reduce los esfuerzos eléctricos en los dispositivos semiconductores. Esto es importante ya que permite la utilización de dispositivos
de menor tensión con mejores características estáticas y dinámicas [2].
2.2.
2.2.1.
Funcionamiento del convertidor
Principales formas de onda
La figura 2.2 muestra las principales formas de onda del ACFBC. Funcionalmente,
el convertidor es equivalente a un convertidor elevador operando en modo de conducción
continuo conectado en cascada con un convertidor reductor operando en modo de conducción discontinuo. El convertidor elevador se forma con el inductor de entrada (Lin ),
los interruptores del puente completo (S1 - S4 encendidos simultáneamente) y el capacitor
del sujetador activo (Cs ) como el capacitor de salida. Nótese que la carga del condensador Cs se realiza a través del diodo en anti-paralelo del MOSFET Ss . Para el convertidor
reductor, la inductancia de dispersión del transformador (Llk ) y el condensador de salida
(Co ) funcionan como el filtro, y el MOSFET Ss actúa como interruptor. Sin embargo,
18
2.2. Funcionamiento del convertidor
durante la etapa de descarga del inductor de entrada, parte de la energía va directamente
a la carga, con lo cual se consigue reducir el doble proceso de la energía, tradicional de
convertidores conectados en cascada. Esto ayuda a incrementar la eficiencia.
D
1-D
S1 − S4
Ts
S2 − S3
Ss
Voltaje en el puente completo
V
IL
Corriente en el Inductor de entrada
Corriente magnetizante
Im
Corriente en el primario del transformador
IPrim
Corriente en el sujetador activo
ICs
IS
1
Corriente que circula por el interruptor S1 - S4
t
t 0 t1 t 2
t3 t 4
t5 t 6 t 7
t8 t9
Figura 2.2: Principales formas de onda.
19
2. Convertidor elevador puente completo aislado con sujetador activo
Por otro lado, mediante la operación adecuada de las señales de control es posible
conseguir que los interruptores del puente completo operen mediante conmutación a tensión cero. Para ello se utiliza la energía almacenada en la inductancia de dispersión; sólo
habrá que asegurarse que exista energía suficiente para cargar y descargar la capacitancia
de los MOSFETs, de los diodos de salida y las capacitancias parásitas del transformador
[2].
2.2.2.
Estados de conducción
La operación del convertidor consiste en dos semi-ciclos simétricos en donde cada
semi-ciclo inicia y finaliza con los cuatro interruptores del puente encendidos. Para describir el comportamiento de la topología es necesario mostrar los seis periodos que ocurren
en cada semi-ciclo de conmutación (ver figura 2.2).
Condición inicial t < t0 . Antes del instante t0 , los interruptores S1 , S2 , S3 y S4
se encuentran encendidos y el interruptor Ss se encuentra apagado (con su capacitancia
asociada cargada); las inductancias magnetizante y de dispersión se encuentran cortocircuitadas porque los interruptores están encendidos. Debido a la condición de encendido
de los interruptores, el inductor de entrada (Lin ) está almacenando energía, y no hay
transferencia de energía hacia la salida. Mientras tanto, el capacitor de salida (Co ) suministra la energía a la carga. Los diodos de salida se encuentran polarizados en inversa y
sus capacitancias asociadas están cargadas [2]. El circuito equivalente durante t < t0 se
muestra en la figura 2.3.
L
S1
S2
Vin
Co
S3
Ro
S4
Figura 2.3: Circuito equivalente durante el periodo t < t0 .
Periodo t0 < t < t1 . El circuito equivalente se muestra en la figura 2.4. En el
instante t0 los interruptores en diagonal S1 y S4 se apagan. En consecuencia, la corriente
del inductor IL carga las capacitancias parásitas CS1 , CS4 y al mismo tiempo se inicia la
20
2.2. Funcionamiento del convertidor
descarga de la capacitancia CSS . La tensión en CS1 y CS4 crece mientras que la tensión en
CSS disminuye. En realidad ocurre un proceso resonante entre la suma de la inductancia
magnetizante y de dispersión y las capacitancias parásitas de los interruptores S1 , S4 y
Ss .
La conducción de corriente en el primario (al aplicar la tensión VCS4 , ver figura
2.4) produce un crecimiento de tensión en el secundario del transformador. La diferencia
de tensión que ahora observan los diodos de salida (tensión aplicado desde el primario
reflejado al secundario y la tensión de salida), provoca que las capacitancias de dichos
diodos se empiecen a descargar. El intervalo termina cuando se descargan por completo
las capacitancias correspondientes de los diodos de salida y se alcanza la tensión suficiente
para polarizarlos directamente.
L
S2
Cs1
Vin
Co
Lik
Css
Ro
Lm
+
Cs
Vs
-
S3
Cs4
Figura 2.4: Circuito equivalente durante el periodo t0 < t < t1 .
Periodo t1 < t < t2 . En la figura 2.5 se muestra el circuito equivalente. Durante este
intervalo se inicia la transferencia de energía al conjunto capacitor de salida-carga. Como
se observa, ahora existe un proceso de resonancia entre la inductancia de dispersión y las
capacitancias parásitas de los interruptores S1 , S4 y Ss . Durante este intervalo, la tensión
en las capacitancias parásitas CS1 y CS4 es cada vez mayor y la tensión en CSS es cada
vez menor. Este intervalo finaliza cuando CS1 y CS4 se cargan completamente y CSS se
descarga totalmente. Es importante descargar completamente las capacitancias parásitas
mencionadas y de esa forma conseguir conmutación suave (conmutación a tensión cero).
Cabe señalar que la tensión final de carga, y por lo tanto los esfuerzos de tensión en los
interruptores, es la tensión del capacitor CS (VS ). Este capacitor es de valor suficientemente alto como para no permitir oscilaciones en su tensión, es decir, actúa como un
sujetador. De ahí el nombre asignado a la topología.
21
2. Convertidor elevador puente completo aislado con sujetador activo
L
S2
D1
Cs1
Vin
Co
Lik
Css
Ro
Lm
+
Cs
Vs
D4
S3
-
Cs4
Figura 2.5: Circuito equivalente durante el periodo t1 < t < t2 .
Periodo t2 < t < t3 . El circuito equivalente se muestra en la figura 2.6. En el
instante t2 , DSS conduce la diferencia de corriente entre la corriente del inductor y la
corriente por el primario del transformador (porción positiva de ICS en la figura 2.2).
Esta diferencia de corriente recarga al capacitor Cs . Mientras el diodo DSS se mantenga
encendido, la tensión en el MOSFET SS será cero, y entonces su entendido será a tensión
cero. Obviamente, existe un tiempo finito para conseguir la ZV S en este interruptor; este
tiempo está determinado por el instante en que la corriente del inductor L sea igual a la
corriente del primario del transformador, es decir, antes que la corriente ICS sea negativa.
El balance de energía en el capacitor Cs debe cumplirse para evitar variaciones en su
tensión, es decir, la energía ganada durante la porción positiva debe ser igual a la energía
entregada durante la porción negativa. Nótese que durante este intervalo la inductancia
de dispersión es la única que limita la corriente que circula a través de los interruptores
del puente
L
D1
S2
Vin
Ss
Co
Lik
Dss
Ro
Lm
+
Cs
D4
Vs
-
S3
Figura 2.6: Circuito equivalente durante el periodo t2 < t < t3 .
Periodo t3 < t < t4 . El circuito equivalente se muestra en la figura 2.7. En el
instante t3 el interruptor Ss se apaga y su capacitancia asociada empieza a cargarse
22
2.2. Funcionamiento del convertidor
mientras se descargan CS1 y CS4 . El intervalo finaliza cuando CS1 y CS4 se descargan
completamente y CSS se carga totalmente. En ese momento es posible la conducción
de los diodos que se encuentran en anti-paralelo con los interruptores S1 y S4 y como
la tensión en las capacitancias en paralelo con esos interruptores es cero, entonces la
conmutación se realiza a tensión cero.
L
S2
D1
Cs1
Vin
Co
Lik
Css
Ro
Lm
+
Cs
Vs
-
D4
S3
Cs4
Figura 2.7: Circuito equivalente durante el periodo t3 < t < t4 .
Periodo t4 < t < t5 . En la figura 2.8 se muestra el circuito equivalente. En el
instante t4 los interruptores S1 y S4 se encienden a tensión cero, dado que en la etapa
anterior se descargaron completamente las capacitancias asociadas a esos interruptores.
Durante este intervalo sigue existiendo cierta transferencia de energía hacia la carga, y es
la correspondiente a la almacenada en la inductancia de dispersión. Esta etapa finaliza
cuando la energía en la inductancia de dispersión "se agota", dejando de conducir los
diodos de salida correspondientes y su capacitancia parásita se carga a la tensión de
salida.
L
S1
D1
S2
Ds1
Vin
Co
Lik
Ro
Lm
D4
S3
S4
Ds4
Figura 2.8: Circuito equivalente durante el periodo t4 < t < t5 .
Periodo t5 < t < t6 . El circuito equivalente es similar al que se presenta antes del
instante t0 (ver figura 2.3). Durante este intervalo los cuatro interruptores del puente
23
2. Convertidor elevador puente completo aislado con sujetador activo
están encendidos y el interruptor Ss se mantiene apagado. La inductancia de entrada del
convertidor (L) se carga, siendo la condición de inicio para el intervalo [t5 - t6 ].
Este periodo sirve de condición inicial para el siguiente semiciclo de operación. El cual
es similar a los modos de operación descritos anteriormente, sólo cambia la polaridad de
la corriente en el primario del transformador; provocando que los diodos correspondientes
(D2 y D3 ) conduzcan.
2.2.3.
Criterios de Diseño
A continuación se describen algunos aspectos importantes que hay que observar para
realizar el diseño del convertidor.
Ganancia en CD
Aún cuando el ACFBC resulta de la conexión en cascada del convertidor elevador
en MCC y un convertidor reductor en MCD (en configuración en puente completo), la
obtención de la ganancia del convertidor no se obtiene de manera directa al multiplicar
las ganancias individuales; esto se debe a que durante cierto instante “se traslapa” la
operación de los convertidores. En [2] y [5] se muestra en detalle la obtención de la
ganancia del convertidor, la cual está dada por:
M=
Vo
n
=
·
Vin
(1 − D)
2
v
u
16Lik Fs
u
1 + u1 + µ ¶
RL
t
(1 − D)2
n2
(2.1)
La ecuación 2.1 muestra que la ganancia en CD del convertidor tiene la influencia
de la resistencia de carga, así como el ciclo de trabajo, lo cual se puede encontrar en
un convertidor que opera en MCD [5]. También n, Lik y Fs tienen un efecto sobre la
ganancia.
Es posible simplificar la ecuación 2.1 para la condición de circuito abierto en la
salida del convertidor (cuando no se tiene carga en la salida, RL = ∞), para este caso la
ganancia es:
24
2.2. Funcionamiento del convertidor
M=
n
(1 − D)
(2.2)
Bajo la condición de circuito abierto, la ganancia en CD sólo depende de la relación
de transformación y el ciclo de trabajo.
La figura 2.9 muestra la ganancia en CD como función del ciclo de trabajo, para
diferentes valores de relación de transformación (Fs = 100 kHz, Lik = 300 nH y RL =
129.6 Ω). También se muestra el resultado obtenido para la condición de circuito abierto.
40
35
Ganancia de voltaje, Vo / Vin
30
Plena carga, n = 2.5
Plena carga, n = 10
Plena carga, n = 20
Circuito abierto, n = 2.5
Circuito abierto, n = 10
Circuito abierto, n = 20
25
20
15
10
5
0
0
0.05
0.1
0.15
0.2
0.25
0.3
Ciclo de Trabajo, D
0.35
0.4
0.45
0.5
Figura 2.9: Ganancia de voltaje en función del ciclo de trabajo.
Se observa que al incrementar la relación de vueltas en el transformador disminuye
el ciclo de trabajo y con una condición de circuito abierto se obtiene un voltaje de salida
mucho más elevado que el esperado en la condición de plena carga; siendo más crítico al
aumentar la relación de transformación y el ciclo de trabajo.
25
2. Convertidor elevador puente completo aislado con sujetador activo
Ciclo de trabajo
De la ecuación 2.1, el ciclo de trabajo está dado por:
D =1−
nVin 4nLik Fs Vo
+
Vo
RL Vin
(2.3)
La operación descrita en el intervalo [t0 − t4 ] ocurre durante el 50 % del periodo de
conmutación. Por lo tanto, el ciclo de trabajo está limitado al 50 %. Por otro lado, debe
existir un tiempo mínimo para que ocurra la carga del inductor, para esto se considera
un tiempo mínimo del 10 %, [2]. La restricción para la selección del ciclo de trabajo es:
0.1 ≤ D < 0.5
(2.4)
La tensión de bloqueo que deben soportar los dispositivos está determinada por la
tensión del condensador del sujetador activo [5]:
VCs =
Vin
1 − D(Lik , Fs )
(2.5)
De acuerdo a esta ecuación, la tensión en el sujetador activo, y por lo tanto de los
dispositivos semiconductores, es función de la tensión de entrada y del ciclo de trabajo,
y este es función de la frecuencia de conmutación y de la inductancia de dispersión del
transformador.
Intervalo de conmutación a voltaje cero (ZVS)
Para garantizar ZVS en los interruptores es necesario que la energía almacenada en la
inductancia de dispersión sea lo suficientemente grande para descargar las capacitancias
parásitas de los interruptores (Cs1 - Cs4 ó Cs2 - Cs3 ), así como para cargar a la capacitancia
parásita del sujetador activo y la capacitancia parásita del embobinado del transformador.
Además, cierta energía de la inductancia de dispersión se transfiere hacia la carga. Para
garantizar suficiente energía en la inductancia de dispersión se debe asegurar que [2]:
£
¤ 1
Dx 1
1
Lik · (2ILin )2 − (ILin )2 > Ceq · VCs 2 + Vo · Io ·
·
2
2
2 2Fs
26
(2.6)
2.2. Funcionamiento del convertidor
donde:
Ceq es la suma de las capacitancias Cs1 , Cs4 , Css y la capacitancia parásita del
embobinado del transformador.
Pero además, el proceso de carga y descarga se debe llevar a cabo mientras la corriente
del transformador sea mayor que la corriente promedio del inductor de entrada [2], [5];
esto se muestra en la figura 2.10.
(1-D)
D
S1 −S4
S2 −S3
Ss
IL
2⋅IL
IL
ILik
t
Dx
Figura 2.10: Formas de onda del intervalo ZVS.
Selección del número de vueltas del transformador
Un punto importante en el diseño del convertidor ACFBC se encuentra relacionado
con el número de vueltas del transformador. En la figura 2.11 se puede ver el comportamiento de la corriente rms que circula a través de los interruptores del puente completo
a diferentes relaciones de transformación y con respecto al ciclo de trabajo [2].
27
2. Convertidor elevador puente completo aislado con sujetador activo
Figura 2.11: Corriente rms en un interruptor del puente completo.
De acuerdo a la gráfica, a medida que la relación de transformación disminuye, los
esfuerzos de corriente son menores. Sin embargo, con relación de transformación más baja
se requiere mayor ciclo de trabajo y como se comento anteriormente, existe un máximo
ciclo de trabajo con el que es posible operar (D < 0.5).
28
Capítulo 3
Análisis en pequeña señal del
convertidor ACFBC.
En este capítulo se presenta el análisis y el desarrollo matemático utilizado para
obtener un modelo en pequeña señal que describe el comportamiento del convertidor
elevador puente completo con sujetador activo en frecuencia, así como, las consideraciones
empleadas para simplificar el análisis.
3.1.
El método de variables de estado promediado.
El modelo de pequeña señal del convertidor ACFBC se obtuvo por medio de la técnica
de variables de estado promediado [7]. Como se menciono en el capítulo 1, la técnica de
variables de estado promediados fue desarrollada por S. Cúk y R. D. Middlebrook en
1976, partiendo del método de circuitos promediados. El método en general implica el
siguiente procedimiento:
1. Identificar las variables de estado del convertidor conmutado, y establecer las ecuaciones de estado para cada circuito equivalente utilizando las leyes de Kirchhoff
de tensión y de corriente.
2. Realizar el promediado de las variables de estado considerando el ciclo de trabajo
29
3. Análisis en pequeña señal del convertidor ACFBC.
como factor dominante y combinar las ecuaciones de estado en una sola para
obtener una ecuación de estado promediado.
ẋ = Āx̄ + B̄ ū
(3.1)
ẋ = [Ā1 d + Ā2 (1 − d)]x̄ + [B̄1 d + B̄2 (1 − d)]ū
(3.2)
3. Perturbar la ecuación de estado promediado para obtener los términos de estado
estable (CD) y los términos dinámicos (CA); se linealiza al eliminar los términos
resultado del producto de términos de CA. La perturbación se obtiene al considerar:
x1 = x10 + xˆ1
(3.3)
x2 = x20 + xˆ2
(3.4)
u1 = u10 + uˆ1
d = D + dˆ1
(3.5)
(3.6)
Con la ecuación de estado perturbada finalmente se obtienen las funciones de transferencia más importantes que describen la respuesta en frecuencia del convertidor. Una
vez estudiado el método de variables de estado promediado se procede a desarrollar el
análisis del convertidor.
El ACFBC es un convertidor PWM con sujetador activo que consigue conmutación
suave en los interruptores. En el capítulo anterior se estudiaron los diferentes circuitos
que describen la operación del convertidor [4]-[5], con esta información se desarrolló un
circuito idealizado para obtener el modelo del convertidor. Para simplificar el análisis en
pequeña señal del convertidor ACFBC se propone el circuito ideal que se muestra en la
figura 3.1.
Lin
+
−
S1
S2
Cs
Lik
Co
Vin
RL
Ss
S3
S4
Figura 3.1: Circuito simplificado del convertidor ACFBC.
30
3.1. El método de variables de estado promediado.
La figura 3.2 presenta las formas de onda que describen el funcionamiento del convertidor, también se idealizaron para facilitar el desarrollo del modelo promediado.
(1-D)
D
S1 −S4
Ts
S2 −S3
Ss
IL
ILik
α
β
IC
s
t
t0
t1 t 2
t3
t 4 t5
t6
Figura 3.2: Formas de onda ideales del convertidor ACFBC.
En la figura 3.2 se observan algunas diferencias en las formas de onda comparadas
con la figura 2.2 del capítulo 2, como son: la eliminación de los tiempos muertos entre
la señal de control del sujetador activo Ss y las señales de control del puente completo
(S1 − S4 y S2 − S3 ); además, las formas de onda son lineales. Con estas consideraciones
se reducen los intervalos de operación [22].
Por otra parte, como se menciona en el capítulo anterior, el convertidor ACFBC
presenta dos semi-ciclos, el primero del intervalo de t0 a t3 y el segundo de t3 a t6 . El
comportamiento del convertidor ACFBC es similar en ambos casos y sólo la corriente en la
inductancia de dispersión cambia de polaridad debido a que se encienden los interruptores
S2 y S3 .
Para el análisis se asume que un ciclo completo se tiene de t0 a t3 , no es necesario
considerar el intervalo t3 a t6 debido a que el comportamiento es similar; con esto se
simplifica el desarrollo del modelo en pequeña señal.
31
3. Análisis en pequeña señal del convertidor ACFBC.
3.2.
Ecuaciones de estado.
A continuación se definen las siguientes variables de estado para el análisis en pequeña señal; las cuales son: corriente del inductor de entrada, voltaje en el capacitor del
sujetador activo, corriente en la inductancia de dispersión, y voltaje en el capacitor de
salida.
iLin = x1
(3.7)
vCs = x2
(3.8)
iLik = x3
(3.9)
vCo = x4
(3.10)
Además se definen los tiempos de operación como:
t0 = 0
(3.11)
t1 = (1 − D)Ts
(3.12)
t2 = αTs
(3.13)
t 3 = Ts
(3.14)
donde:
Ts es el periodo de conmutación definida en la figura 3.2 y α es el intervalo de tiempo
que abarca de t0 a t2 .
En la figura 3.3 se muestran los circuitos equivalentes que describen la operación del
convertidor ACFBC, para cada intervalo de operación dentro del periodo de conmutación
Ts . La inductancia magnetizante Lm del transformador no fue tomada en cuenta para
el modelado, debido a que es más grande que la inductancia de dispersión Lik y por lo
tanto, la corriente que circula a través de Lm es despreciable.
Utilizando las leyes de Kirchhoff de tensión y de corriente se analiza matemáticamente cada uno de los circuitos equivalentes, obteniendo así, las matrices de los coeficientes
de estado, de voltaje y de salida.
32
3.2. Ecuaciones de estado.
Lin
+
−
x1
Vin
Lik
N1
Cs
M1
+
x2
−
N2
1:n
x3
Co
M2
+
x4
−
RL
(a) Intervalo t0 a t1 .
+
−
Lin
Lik
x1
x3
1:n
Vin
Co
+
x4
−
RL
(b) Intervalo t1 a t2 .
Lin
+
−
x1
Vin
Co
+
x4
−
RL
(c) Intervalo t2 a t3 .
Figura 3.3: Circuitos equivalentes del convertidor ACFBC
Intervalo t0 a t1
Para el circuito equivalente mostrado en la figura 3.3(a), correspondiente al intervalo
de tiempo de t0 a t1 , se obtuvieron las siguientes ecuaciones:
Aplicando la ley de voltajes de Kirchhoff (LKV ) para la malla M1 se obtiene:
− Vin + VLin + VCs = 0
− Vin + Lin
(3.15)
diLin
+ VCs = 0
dt
(3.16)
dx1
+ x2 = 0
dt
(3.17)
− Vin + Lin
33
3. Análisis en pequeña señal del convertidor ACFBC.
− Vin + Lin ẋ1 + x2 = 0
Vin − x2
Lin
ẋ1 =
(3.18)
(3.19)
De igual forma para malla M2 se encuentra:
− VCs + VLik +
− VCs + Lik
(3.20)
diLik VCo
+
=0
dt
n
(3.21)
dx3 x4
+
=0
dt
n
(3.22)
− x2 + Lik
− x2 + Lik ẋ3 +
ẋ3 =
VCo
=0
n
x4
=0
n
x2
x4
−
Lik nLik
(3.23)
(3.24)
Aplicando la ley de corrientes de Kirchhoff (LKC ) al nodo N1 del capacitor Cs se
tiene:
iLin = iCs + iLik
(3.25)
x1 = iCs + x3
(3.26)
x1 = C s
dx2
+ x3
dt
x1 = Cs x˙2 + x3
34
(3.27)
(3.28)
3.2. Ecuaciones de estado.
ẋ2 =
x1 − x3
Cs
(3.29)
Para el nodo N2 del capacitor de salida Co se plantean las siguientes ecuaciones:
iLik
= iCo + iRL
n
(3.30)
x3
dx4
x4
= Co
+
n
dt
RL
(3.31)
x3
x4
= Co ẋ4 +
n
RL
(3.32)
x3
x4
−
nCo Co RL
ẋ4 =
(3.33)
Intervalo t1 a t2
Aplicando LKV al circuito de la figura 3.3(b) se obtienen las ecuaciones siguientes:
− Vin + VLin = 0
− Vin + Lin
dx1
=0
dt
− Vin + Lin x˙1 = 0
ẋ1 =
Vin
Lin
VLik = −
Lik
VCo
n
x4
dx3
=−
dt
n
(3.34)
(3.35)
(3.36)
(3.37)
(3.38)
(3.39)
35
3. Análisis en pequeña señal del convertidor ACFBC.
x4
nLik
(3.40)
x3
x4
=
RL
n
(3.41)
ẋ3 = −
Aplicando LKC se obtiene:
iCo +
Co
x3
x4
dx4
+
=
dt
RL
n
Co x˙4 +
x3
x4
=
RL
n
x3
x4
−
nCo C0 RL
ẋ4 =
(3.42)
(3.43)
(3.44)
Intervalo t2 a t3
Por último aplicando LKV y LKC en el circuito equivalente mostrado en la figura
3.3(c) tenemos:
VLin = Vin
Lin
diLin
= Vin
dt
Lin ẋ1 = Vin
ẋ1 =
Vin
Lin
iCo + iRL = 0
36
(3.45)
(3.46)
(3.47)
(3.48)
(3.49)
3.2. Ecuaciones de estado.
Co
dVCo
x4
+
=0
dt
RL
Co ẋ4 +
(3.50)
x4
=0
RL
(3.51)
x4
Co RL
(3.52)
ẋ4 = −
Con las ecuaciones anteriores se obtienen las matrices de los coeficientes de estado,
de voltajes y de salida para cada intervalo de tiempo; en la tabla 3.1 se muestran dichas
matrices.
Tabla 3.1: Resumen de Ecuaciones de Estado
Intervalo:
Matriz de coeficientes
t0 a t1
1
Ā1 = Cs
0
0
t1 a t2
− L1in
0
0
1
0
− Cs
0
1
0
− nL1ik
Lik
1
− Co1RL
0
nCo
0
Ā2 =
0
0
0
0
t2 a t3
Ā3 =
0
0
0
0
0
0
0
0
0
0
0
1
nCo
0
0
0
0
0
0
− nL1ik
− Co1RL
0
0
0
0
0
0
0 − Co1RL
Matriz de voltajes
Matriz de salida
0
B̄1 =
0
0
C̄1 =
1
Lin
0
B̄2 =
0
0
C̄2 =
1
Lin
0
B̄3 =
0
0
C̄3 =
1
Lin
0
0
0
1
0
0
0
1
0
0
0
1
37
3. Análisis en pequeña señal del convertidor ACFBC.
3.3.
Promediado de las matrices de estado y ganancia
en CD.
El segundo paso para el desarrollo del modelo en pequeña señal consiste en promediar
las matrices de coeficientes de estado, de las fuentes y de salida. El promediado se realiza
multiplicando cada una de las matrices de estado por el periodo de tiempo equivalente.
Para el circuito equivalente de t0 a t1 el intervalo es 1 − D, para t1 a t2 es β y para t2 a
t3 es 1 − (1 − D + β).
Para la matriz de los coeficientes de estados se obtiene:
0
1
Ā = Cs
0
0
Ā = Ā1 (1 − D) + Ā2 (β) + Ā3 [1 − (1 − D + β)]
(3.53)
Ā = Ā1 (1 − D) + Ā2 (β) + Ā3 (D − β)
(3.54)
− L1in
0
0
1
0
− Cs
0
1
0
− nL1ik
Lik
1
0
− Co1RL
nCo
0 0
0 0
+
0 0
0 0
Ā =
0
(1−D)
Cs
0
0
(1 − D) +
0
0
0
0
0
0
0 − Co1RL
0
0
0
0
0
0
0
0
0
0
0
1
nCo
0
0
− nL1ik
− Co1RL
(D − β)
− (1−D)
0
0
Lin
(1−D)
0
− Cs
0
(1−D)
1−D+β
0
− nLr
Lr
1−D+β
0
− Co1RL
nCo
(β) +
(3.55)
(3.56)
Y en la matriz de voltajes es:
B̄ = B̄1 (1 − D) + B̄2 (β) + B̄3 (D − β)
38
(3.57)
3.3. Promediado de las matrices de estado y ganancia en CD.
1
Lin
1
Lin
1
Lin
0
0
0
B̄ =
(1 − D) +
(β) +
(D − β)
0
0
0
0
0
0
1
Lin
(3.58)
0
B̄ =
0
0
(3.59)
Por último, la matriz de salida resulta:
C̄ = C̄1 (1 − D) + C̄2 (β) + C̄3 (D − β)
C̄ =
0
0
0
1
(1 − D) +
0
0
0
1
C̄ =
(β) +
0
0
0
1
0
0
0
1
(3.60)
(D − β)
(3.61)
(3.62)
Una vez realizado el promediado se formula la ecuación de las variables de estado
promediados. En base a la ecuación 3.1 se obtiene:
ẋ = Āx̄ + B̄ ū
x˙1
x˙2
x˙3
x˙4
=
0
(1−D)
Cs
0
0
− (1−D)
0
0
Lin
(1−D)
0
− Cs
0
(1−D)
1−D+β
0
− nLik
Lik
1−D+β
0
− Co1RL
nCo
x1
x2
x3
x4
1
Lin
0
+
Vin
0
0
(3.63)
39
3. Análisis en pequeña señal del convertidor ACFBC.
Por otra parte, para la ecuación de salida se tiene:
y = C̄ T x̄
y=
0
0
0
1
(3.64)
T
x̄
(3.65)
Ganancia de CD
Para determinar la ganancia en CD del convertidor ACFBC se hacen cero las derivadas de las variables de estado en la ecuación 3.1:
0 = ĀX + B̄U
(3.66)
Despejando X en la ecuación anterior.
−1
X = −A BU
(3.67)
El voltaje de salida esta dado por la ecuación de salida:
y = Vo = C̄ T X
(3.68)
Sustituyendo 3.67 en 3.68 y considerando U = Vin , se obtiene la ganancia de voltaje:
¢
¡
Vo = C̄ T −Ā−1 B̄ · Vin
(3.69)
Vo
= −C̄ T Ā−1 B̄
Vin
(3.70)
M=
40
3.3. Promediado de las matrices de estado y ganancia en CD.
M =−
£
0 0 0 1
¤
M=
0
(1−D)
Cs
0
0
0
0
− (1−D)
Lin
(1−D)
0
− Cs
0
(1−D)
1−D+β
0
− nLr
Lr
1−D+β
− Co1RL
0
nCo
n
=
1−D+β
µ
n
β
(1 − D) 1 +
1−D
−1
1
Lin
0
0
0
¶
(3.71)
(3.72)
El valor de β es el intervalo de tiempo durante el cual la corriente del primario del
transformador se hace cero y depende de la inductancia de dispersión Lik , entre otros
parámetros.
La figura 3.4 muestra la ganancia de voltaje como función del ciclo de trabajo para
la ecuación 2.1 propuesta en [2] y la ecuación 3.72 (n = 2.5, Fs = 100 kHz, Lik = 300 nH,
RL = 172 Ω y β = 60 nSeg).
5
Ecuación (2.1)
Ganancia de voltaje
4.5
Ecuación (3.72)
4
3.5
3
2.5
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Ciclo de trabajo, D
Figura 3.4: Ganancia de voltaje en función del ciclo de trabajo.
Se observa un comportamiento aproximado entre las dos ecuaciones de ganancia de
voltaje de CD.
41
3. Análisis en pequeña señal del convertidor ACFBC.
3.4.
Análisis en CD: Modelo de CD del ACFBC.
De la ecuación de estado 3.63 se pueden obtener las relaciones que describen el comportamiento del convertidor. Partiendo de estas ecuaciones se puede obtener un circuito
equivalente no lineal continuo.
Las ecuaciones de estado son:
x˙1 = −
(3.73)
(1 − D)
(1 − D)
x1 −
x3
Cs
Cs
(3.74)
(1 − D)
1−D+β
x2 −
x4
Lik
nLik
(3.75)
1−D+β
1
x3 −
x4
nCo
Co RL
(3.76)
x˙2 =
x˙3 =
Vin
(1 − D)
x2 +
Lin
Lin
x˙4 =
La ecuación 3.73 se puede arreglar para expresar una sumatoria de tensiones:
x˙1 =
1
[− (1 − D) x2 + Vin ]
Lin
Lin x˙1 = − (1 − D) x2 + Vin
Lin
dx1
= − (1 − D) x2 + Vin
dt
VLin = − (1 − D) VCs + Vin
(3.77)
(3.78)
(3.79)
(3.80)
Reescribiendo el resto de las ecuaciones de estado es fácil ver una sumatoria de
voltajes en el caso de los inductores y una sumatoria de corrientes para los capacitores.
42
3.5. Análisis en CA ( small signal).
Por medio de la relación entre las ecuaciones de las variables de estado es posible
dibujar un circuito no lineal continuo. La figura 3.5 muestra el circuito equivalente, los
transformadores mostrados son transformadores de CD.
Lin
1:
1 : 1− D
1
1− D
x1
Cs
−
1:
n
1− D + β
x3
+
+
− Vin
Lik
+
x2
Co
x4
−
RL
Figura 3.5: Circuito equivalente no lineal continuo.
El transformador de CD no es un dispositivo real, sólo sirve para explicar el modelo.
Se trata de un transformador ideal que puede elevar o reducir un nivel de CD aplicado
c
en el devanado primario. El programa SIMetrix°
incluye un transformador de CD.
Para obtener un modelo de CD los inductores se sustituyen por un cortocircuito
y los capacitores por un circuito abierto. El circuito equivalente de CD se muestra a
continuación.
1:
1
1− D
1 : 1− D
1:
n
1− D + β
+
− Vin
RL
+
Vo
−
Figura 3.6: Circuito de CD.
Analizando el circuito anterior se obtiene la ecuación de la ganancia de CD, la cual
concuerda con el resultado obtenido en la ecuación 3.72.
3.5.
Análisis en CA (small signal ).
Para obtener el circuito en pequeña señal es necesario perturbar las ecuaciones de
estado 3.73 a la 3.76.
43
3. Análisis en pequeña señal del convertidor ACFBC.
³
d
(x10 + xˆ1 ) = −
dt
³
d
(x20 + xˆ2 ) =
dt
³
d
(x30 + xˆ3 ) =
dt
´
1 − D − dˆ
Lin
´
ˆ
1−D−d
Cs
´
1 − D − dˆ
Lik
³
d
(x40 + xˆ4 ) =
dt
(x20 + xˆ2 ) +
³
(x10 + xˆ1 ) −
(x20 + xˆ2 ) −
1 − D − dˆ + β
nCo
(u10 + uˆ1 )
Lin
´
ˆ
1−D−d
Cs
(x30 + xˆ3 )
³
´
1 − D − dˆ + β
nLik
(x40 + xˆ4 )
(3.81)
(3.82)
(3.83)
´
(x30 + xˆ3 ) −
1
(x40 + xˆ4 )
Co RL
(3.84)
Si eliminamos los términos de alto orden se linealizan las ecuaciones. El resultado
son las siguientes ecuaciones.
d
(1 − D)
x20 dˆ (u10 + uˆ1 )
(xˆ1 ) = −
(x20 + xˆ2 ) +
+
dt
Lin
Lin
Lin
(3.85)
d
(1 − D)
x10 dˆ (1 − D)
x30 dˆ
(xˆ2 ) =
(x10 + xˆ1 ) −
−
(x30 + xˆ3 ) +
dt
Cs
Cs
Cs
Cs
(3.86)
(1 − D)
x20 dˆ (1 − D + β)
x40 dˆ
d
(xˆ3 ) =
(x20 + xˆ2 ) −
−
(x40 + xˆ4 ) +
dt
Lik
Lik
nLik
nLik
(3.87)
d
(1 − D + β)
x30 dˆ
1
(xˆ4 ) =
(x30 + xˆ3 ) −
−
(x40 + xˆ4 )
dt
nCo
nCo
Co RL
(3.88)
A partir de estas ecuaciones se puede dibujar el circuito en pequeña señal del convertidor ACFBC (figura 3.7).
44
3.6. Funciones de transferencia
Lin
+
−
+
−
1:
1 : 1− D
1
1− D
x10 + x1
u10 + uˆ1
Lik
x30 + xˆ3
+
x20 ⋅ dˆ
+−
1:
n
1− D+ β
x20 ⋅ dˆ
Co
x20 + xˆ2
Cs
−
x10 ⋅ dˆ
x30 ⋅ dˆ
x40 ˆ
d
n
+−
x30 ˆ
d
+
x40 + xˆ4
−
RL
n
Figura 3.7: Circuito equivalente híbrido en pequeña señal.
3.6.
3.6.1.
Funciones de transferencia
Entrada-salida.
Para obtener la respuesta en pequeña señal del convertidor es necesario perturbar la
ecuación de estado promediado y se linealiza eliminando los términos de alto orden. Para
realizar la perturbación en torno a un punto de operación, se considera que los términos
consisten de un término de estado estable más un incremento [7],[23].
En el caso de la función de transferencia de entrada-salida se perturban las variables
de estado y se aplican variaciones en el voltaje de entrada.
u = Ū + û → x (t) = X + x̂ (t)
(3.89)
Sustituyendo las perturbaciones en la ecuación de estados promediados se obtiene:
d
(X + x̂) = Ā (X + x̂) + B̄ (U + û)
dt
(3.90)
dx̂
= ĀX
+ B̄U} +Āx̂ + B̄ û
| {z
dt
(3.91)
T érmino de CD
Aplicando transformada de Laplace y eliminando el término de CD resulta:
sx̂ (s) = Āx̂ (s) + B̄ û (s)
(3.92)
45
3. Análisis en pequeña señal del convertidor ACFBC.
Despejando x̂(s) en la ecuación anterior y aplicando la transformada de Laplace a
la ecuación 3.64 se obtiene:
¡
¢−1
x̂ (s) = sI − Ā
B̄ · û (s)
(3.93)
v̂o (s) = C̄ T x̂ (s)
(3.94)
Sustituyendo la ecuación 3.93 en 3.94 se obtiene la función de transferencia del
voltaje de entrada-salida.
¡
¢−1
v̂o (s)
= C̄ T sI − Ā
B̄
û (s)
(3.95)
Sustituyendo las matrices de estado presentadas en la tabla 3.1, se obtiene la función
de transferencia entrada-salida:
v̂o (s)
=
3
û (s)
s4 + Cso RL +
3.6.2.
(1−D+β)(1−D)2
nCo Cs Lik Lin
n2 C0 (Lik +Lin )(1−D)2 +(1−D+β)2 Cs Lin 2
s
n2 Co Cs Lik Lin
+
(Lik +Lin )(1−D)2
s
Co Cs Lik Lin RL
+
(1−D+β)2 (1−D)2
n2 Co Cs Lik Lin
(3.96)
Control-salida.
De igual forma, para obtener la función control-salida se aplican perturbaciones en
las variables de estado, pero en esta ocasión se utilizan modulaciones en el ciclo de trabajo
que producen modulaciones en el vector de estados promediados y en la salida.
d (t) = D + dˆ(t) → x (t) = X + x̂ (t)
(3.97)
Aplicando la perturbación 3.97 en la ecuación de estado promediado 3.1 y sustituyendo los valores de la matrices de estados promediados Ā y B̄, ecuaciones (3.54), (3.57)
respectivamente, se obtiene la ecuación de estados promediados perturbada y agrupando
términos se obtiene:
46
3.6. Funciones de transferencia
£¡
¢
¡
¢ ¤
¡
¢
dx̂
= ĀX
+ B̄ Ū} +Āx̂ + −Ā1 + Ā3 X + −B̄1 + B̄3 Ū dˆ+ −Ā1 + Ā3 x̂dˆ (3.98)
|
{z
dt
|
{z
}
T érminos en CD
T érminos no lineales
Eliminando los términos no lineales se obtiene la ecuación de estados promediados
linealizada; así como los términos en CD.
£¡
¢
¡
¢ ¤
dx̂
= Āx̂ + −Ā1 + Ā3 X + −B̄1 + B̄3 Ū dˆ
dt
(3.99)
De igual forma para le ecuación de salida 3.64 se obtiene:
¡
¢
v̂o = C̄ T x̂ + −C̄1T + C̄3T X dˆ
(3.100)
Aplicando la trasformada de Laplace a las ecuaciones 3.99 y 3.100 se tiene:
¡
¢−1 £¡
¢
¡
¢ ¤
x̂ (s) = sI − Ā
−Ā1 + Ā3 X + −B̄1 + B̄3 Ū dˆ(s)
(3.101)
¡
¢
v̂o (s) = C̄ T x̂ (s) + −C̄1T + C̄3T X dˆ(s)
(3.102)
Entonces, la función de transferencia control-salida está dada por la siguiente ecuación:
¢
v̂o (s)
x̂ (s) ¡
= C̄ T
+ −C̄1T + C̄3T X
dˆ(s)
dˆ(s)
Despejando
tiene:
x̂(s)
ˆ
d(s)
(3.103)
en 3.101 y sustituyendo en 3.103, junto con la ecuación 3.67, se
¢¤
¡
¢¡
¢
¢¡
¢ ¡
¡
¢−1 £¡
v̂o (s)
= C̄ T sI − Ā
−Ā1 + Ā3 −Ā−1 B̄ + −B̄1 + B̄3 Ū − −C̄1T + C̄3T Ā−1 B̄ Ū
dˆ(s)
(3.104)
Para las matrices de estado obtenidas anteriormente la ecuación 3.104 se simplifica,
resultando:
47
3. Análisis en pequeña señal del convertidor ACFBC.
¡
¢−1 ¡
¢¡
¢
v̂o (s)
= C̄ T sI − Ā
Ā1 − Ā3 Ā−1 B̄ Ū
dˆ(s)
(3.105)
Finalmente, sustituyendo los valores de las matrices promediadas del convertidor
estudiado se obtiene:
³
v̂o (s)
=
dˆ(s)
3.6.3.
−Vin
n
s3
(1−D+β)2 C0 RL
3
s4 + Cso RL +
+
β
s2
nC0 Lik (1−D)
+
n(Lik +Lin )(1−D)2
s
(1−D+β)2 Co Cs Lik Lin RL
n2 C0 (Lik +Lin )(1−D)2 +(1−D+β)2 Cs Lin 2
s
n2 C0 Cs Lik Lin
+
−
(Lik +Lin )(1−D)2
s
C0 Cs Lik Lin RL
+
(1−D)2
nCo Cs Lik Lin
´
(1−D+β)2 (1−D)2
n2 C0 Cs Lik Lin
(3.106)
Impedancia de entrada.
La función de transferencia de la impedancia de entrada del convertidor ACFBC es
importante, debido a que determina la interacción con la etapa de entrada. Partiendo de
la ecuación 3.93 se obtiene:
¢−1
x̂ (s) ¡
= sI − Ā
B̄
û (s)
(3.107)
Sustituyendo los valores de la matrices de estados promediados encontradas anteriormente.
x̂ (s)
=
3
û (s)
s4 + Cso RL +
1
Lin
³
s3 +
s2
Co RL
2
2
2
2
+(1−D+β) Cs
+ n Co (1−D)
s + Co(1−D)
n2 Co Cs Lik
³ 2
´ Cs Lik RL
(1−D+β)2
1−D
s
s
+
+ 2
Lin
Cs
³ Co Cs RL n Co Cs L´ik
2
(1−D)
s
+ Co Cs L1 ik RL
Lin
Cs Lik
´
(1−D+β)(1−D)2
nCo Cs Lik Lin
n2 Co (Lik +Lin )(1−D)2 +(1−D+β)2 Cs Lin 2
s
n2 Co Cs Lik Lin
+
(Lik +Lin )(1−D)2
s
Co Cs Lik Lin RL
+
(1−D+β)2 (1−D)2
n2 Co Cs Lik Lin
(3.108)
Cada fila de la matriz mostrada en el numerador de la ecuación anterior, pertenece a
una variable de estado perturbada xˆ1 , xˆ2 , xˆ3 y xˆ4 , respectivamente. Tomando la expresión
que representa a la corriente de entrada (xˆ1 ) se obtiene la función xˆ1 /û, que representa
48
3.6. Funciones de transferencia
la admitancia de entrada del convertidor. Finalmente la función de transferencia de la
impedancia de entrada se obtiene al aplicar el recíproco a la admitancia:
3
s4 + Cso RL +
û (s)
=
xˆ1 (s)
n2 Co (Lik +Lin )(1−D)2 +(1−D+β)2 Cs Lin 2
s
n2 Co Cs Lik Lin
1
Lin
³
s3 +
s2
Co RL
+
+
(Lik +Lin )(1−D)2
s
Co Cs Lik Lin RL
n2 Co (1−D)2 +(1−D+β)2 Cs
s
n2 Co Cs Lik
+
2
2
(1−D)
+ (1−D+β)
n2 Co Cs Lik Lin
´
(1−D)2
Co Cs Lik RL
(3.109)
3.6.4.
Variables de estado-control.
Partiendo de la ecuación 3.101 se obtiene
x̂(s)
ˆ ,
d(s)
para el convertidor ACFBC se tiene
que B̄1 = B̄3 , por lo tanto, la expresión se simplifica:
¢−1 ¡
¢
x̂ (s) ¡
= sI − Ā
−Ā1 + Ā3 X
dˆ(s)
(3.110)
Donde X esta dada por la ecuación 3.67. Sustituyendo los valores de la matrices de
estados promediados conocidas se obtiene:
Vin
(1−D)Lin
³
3
s +
s2
Co RL
+
(1−D+β)3 Cs +n2 (1−D)3 Co
s
(1−D+β)n2 Co Cs Lik
+
2(1−D)3
(1−D+β)Co Cs Lik RL
´
³
´
2
(1−D+β)(L
+L
)−L
(1−D)
(1−D+β)
(1−D+β)(L
+L
)−2L
(1−D)
Vin
in
in
in
in
ik
ik
s + n2 Co Cs Lik
s2 +
Lin
(1−D+β)Cs Lik
(1−D+β)Co Cs Lik RL
³
´
3
3
(1−D)
2(1−D)
1−D−β 2
Vin
3
−βs
+
s
+
s
+
(1−D+β)Lik (1−D)
Co RL
Cs Lin
Co Cs Lin RL
³
´
2
2
n(1−D) (Lik +Lin )
(1−D)
−β
Vin
n
2
3
− (1−D+β)2 RL s + nLik (1−D) s − (1−D+β)2 Cs Lik Lin RL s + nCs Lik Lin
Co
x̂ (s)
=
dˆ(s)
s4 +
s3
Co RL
+
n2 Co (Lik +Lin )(1−D)2 +(1−D+β)2 Cs Lin 2
s
n2 Co Cs Lik Lin
+
(Lik +Lin )(1−D)2
s
Co Cs Lik Lin RL
+
(1−D+β)2 (1−D)2
n2 Co Cs Lik Lin
(3.111)
A partir de esta ecuación es posible evaluar cada una de las variables de estado. La
primera fila de la matriz corresponde a la corriente en el inductor de entrada iLin , seguida
después por el voltaje en el capacitor del sujetador vCs , la corriente en la inductancia de
dispersión iLik y finalmente el voltaje en el capacitor de salida vCo .
49
3. Análisis en pequeña señal del convertidor ACFBC.
50
Capítulo 4
Características en pequeña señal
mediante simulación.
En este capítulo se presenta la respuesta en frecuencia del convertidor ACFBC obc
tenida por medio del modelo en pequeña señal y el simulador SIMetrix/SIMPLIS °
.
También se muestran resultados experimentales de la respuesta a un escalón en el voltaje
de entrada.
4.1.
Funciones de transferencia mediante simulación y
comparación.
Para la extracción de las características en pequeña señal del convertidor ACFBC, se
c
utiliza el programa SIMetrix/SIMPLIS 5.2 °
(Catena Software Ltd). Como se mencionó
anteriormente, SIMPLIS realiza análisis en pequeña señal utilizando el mismo procedimiento empleado por los equipos de medición, logrando excelentes resultados.
En la tabla 4.1 se muestran las especificaciones del convertidor ACFBC utilizadas
para la simulación; éstas se obtuvieron del prototipo experimental que se encuentra en el
laboratorio de electrónica del cenidet y es producto del trabajo de tesis desarrollado por
J. Molina [2].
51
4. Características en pequeña señal mediante simulación.
Tabla 4.1: Especificaciones eléctricas
Parámetro
Valor
Voltaje de entrada Vin
Voltaje de salida Vo
Relación de vueltas n
Inductor de entrada Lin
Capacitor sujetador Cs
Inductancia de dispersión Lik
Capacitor de salida Co
Resistencia de carga RL
Frecuencia de conmutación Fs
Ciclo de trabajo D
Intervalo β
48 volts
180 volts
2.5
630.4 µH
3.85 µF
300 nH
2.37 µF
172 Ω
100 kHz
34 %
2%
Las funciones de transferencias del convertidor ACFBC obtenidas con el método de
variables de estado promediados se comparan con la respuesta en frecuencia extraídas
por medio del programa SIMetrix/SIMPLIS.
4.1.1.
Función de transferencia entrada-salida
c
Para obtener las gráficas de magnitud y fase, se emplea el programa MATLAB 7 °
(The MathWorks, Inc.). Sustituyendo las especificaciones mostradas en la tabla 4.1 en la
ecuación 3.96 se obtiene la función de transferencia entrada-salida siguiente:
v̂o (s)
6.696x1019
= 4
û (s)
s + 2453s3 + 4.763x1011 s2 + 9.256x1014 s + 1.776x1019
(4.1)
La figura 4.1 muestra el circuito del convertidor ACFBC utilizado en SIMetrix/SIMPLIS para obtener las características en pequeña señal; en este circuito se utiliza el modelo
del MOSFET IRF B4710 como interruptores de potencia.
52
4.1. Funciones de transferencia mediante simulación y comparación.
IN
VOUT
OUT
=OUT/IN
630.4u
irfb4710
L1
AC 100m 0
V7
VG1
irfb4710
VG2
Q9
D14
IDEAL
Q7
D13
IDEAL
VsGND
VG1GND
VG2GND
300n
Q6
VS
L2
48
V1
TX2
P1
irfb4710
3.85u
C1
irfb4710
VG3
D12
IDEAL
irfb4710
VG4
Q10
2.37u
C2
S1
172
R1
D11
IDEAL
Q8
VG4
VS
VG1
VG2
VG3
X1
V6
V3
VsGND
VG1GND
V2
V5
V4
VG2GND
Figura 4.1: Circuito simulado en SIMetrix/SIMPLIS con MOSFETs.
También se simula un circuito con interruptores ideales (ver figura 4.2). Al igual que
en la figura anterior, se utiliza una fuente senoidal para introducir la perturbación en el
voltaje de entrada y así conseguir la respuesta en frecuencia entrada-salida.
VOUT
IN
OUT
=OUT/IN
630.4u
L1
S1
D1
IDEAL
VG1
AC 100m 0
V7
S2 D2
IDEAL
VG2
D14
IDEAL
D13
IDEAL
300n
S5 D5
IDEAL
VS
48
V1
L2
TX2
P1
3.85u
C7
S3
D3
IDEAL
VG2
VS
VG1
D12
IDEAL
S4
D4
IDEAL
VG1
2.37u
C2
S1
D11
IDEAL
172
R1
VG2
U1
BUF
V6
1.29
V10
V9
X1
U3
Figura 4.2: Circuito simulado en SIMetrix/SIMPLIS con interruptores ideales.
53
4. Características en pequeña señal mediante simulación.
En la figura 4.3 se muestran las gráficas de magnitud y fase de la función de transferencia de entrada-salida del convertidor ACFBC. En esta figura se muestran los resultados
obtenidos por medio del modelo de estados promediado y el simulador SIMPLIS, utilizando interruptores ideales y MOSFETs.
Magnitud (dB)
0
−50
−100
−150
0
Fase (deg)
−90
−180
Modelo
−270
Simulación con MOSFET
simulacion ideal
−360
1
10
100
1k
10k
100k
1M
Figura 4.3: Función entrada-salida obtenida con SIMPLIS y el Modelo promediado.
Para observar la diferencia cuantitativa entre la respuesta obtenida con el modelo
promediado y la simulación en SIMPLIS, se utiliza el error relativo. El error relativo es
el cociente del error absoluto y el valor exacto [25].
²=
donde:
²
Vmodel
Vsim
54
Error relativo.
Valor del modelo.
Valor del simulador.
|Vsim − Vmodel |
Vsim
(4.2)
4.1. Funciones de transferencia mediante simulación y comparación.
En las gráficas 4.4 y 4.5 se muestra el error del modelo promediado con respeto a
la simulación en SIMPLIS con interruptores MOSFETs e ideales, para la ganancia y la
fase.
35
30
Simulación con MOSFET
Simulación ideal
Error (%)
25
20
15
10
5
0
1
10
100
1k
10k
100k
1M
Frecuencia (Hz)
Figura 4.4: Error relativo para la ganancia entre SIMPLIS y el Modelo promediado.
45
Simulación con MOSFET
40
Simulación ideal
35
Error (%)
30
25
20
15
10
5
0
1
10
100
1k
10k
100k
1M
Frecuencia (Hz)
Figura 4.5: Error relativo para la fase entre SIMPLIS y el Modelo promediado.
55
4. Características en pequeña señal mediante simulación.
En las gráficas anteriores se observa un error considerable para frecuencias por arriba
de la mitad de la frecuencia de conmutación (31.95 % en el peor caso para la ganancia y
42.57 % para la fase), esto es algo común en los modelos de variable de estado promediado; debido a que sólo son validos para frecuencias por debajo de Fs /2. Para valores bajos
de frecuencia el error es cercano a cero.
A continuación se muestra en la figura 4.6, el efecto de la inductancia magnetizante
Lm en la función de transferencia entrada-salida.
VOUT
IN
OUT
=OUT/IN
630.4u
L1
S1
D1
IDEAL
VG1
AC 100m 0
V7
S2D2
IDEAL
VG2
S5 D5
IDEAL
VS
48
V1
3.85u
C7
S3
D3
IDEAL
VG2
VG1
U1
1.29
V10
V9
P1
2.37u
C2
S1
D12
IDEAL
S4
D4
IDEAL
VG1
D13
IDEAL
TX2
479u
L2
VS
V6
D14
IDEAL
D11
IDEAL
172
R1
VG2
BUF
X1
U3
Figura 4.6: Circuito simulado en SIMPLIS incluyendo la inductancia magnetizante.
En la figura 4.7 se muestra la gráfica de magnitud y fase para la función entradasalida con inductancia de dispersión y con inductancia magnetizante. En esta figura se
observa que la inductancia magnetizante no afecta a la función entrada-salida por debajo
de la mitad de la frecuencia de conmutación.
56
4.2. Función entrada-salida utilizando el programa PSIM
50
Magnitud (dB)
0
−50
−100
−150
0
Fase (Deg)
−200
−400
Simulación con inductancia magnetizante
Simulación con inductancia de dispersión
−600
1
10
100
1k
10k
100k
1M
Frecuencia (Hz)
Figura 4.7: Función entrada-salida con inductancia de dispersión y magnetizante.
4.2.
Función entrada-salida utilizando el programa PSIM
c
El programa PSIM°
de la compañía Powersim Inc. simula circuitos de electrónica de potencia de forma rápida y sencilla, debido a que utiliza modelos ideales en los
componentes electrónicos y omite el estado transitorio.
PSIM también puede realizar simulaciones con barrido en frecuencia para proporcionar gráficas de magnitud y fase con respecto al plano de la frecuencia. En la figura 4.8
se muestra el diagrama esquemático del convertidor ACFBC implementado en PSIM.
57
4. Características en pequeña señal mediante simulación.
Figura 4.8: Circuito implementado en PSIM.
La figura 4.9 muestra la gráfica de magnitud y fase de la función entrada-salida
obtenida con el programa PSIM.
amp(Vsal)
30.00
20.00
10.00
0.00
-10.00
-20.00
-30.00
phase(Vsal)
0.00
-50.00
-100.00
-150.00
-200.00
0.10
0.20
0.40
0.60
0.80 1.00
Frequency (KHz)
2.00
4.00
6.00
8.00 10.00
Figura 4.9: Gráfica de magnitud y fase en PSIM.
Al comparar esta gráfica con la figura 4.3, se observa que los resultados son similares
a los obtenidos con el programa SIMPLIS y el modelo promediado en pequeña señal.
58
4.2. Función entrada-salida utilizando el programa PSIM
4.2.1.
Impedancia de entrada
Como se mencionó anteriormente, la función de transferencia de la impedancia de
entrada correspondiente al convertidor ACFBC es de gran importancia, debido a que
determina la estabilidad del convertidor al conectarlo a la fuente de la entrada (celda de
combustible por ejemplo) o una primer etapa (otro convertidor).
A continuación se muestra la función de transferencia obtenida al sustituir los valores
mostrados en la tabla 4.1 en la ecuación 3.109:
û (s)
6.304x10−4 s4 + 1.546s3 + 3.094x108 s2 + 5.835x1011 s + 1.283x1016
=
xˆ1 (s)
s3 + 2453s2 + 4.906x1011 s + 9.252x1014
(4.3)
Las figuras 4.11 y 4.10 muestran los circuitos esquemáticos utilizados para obtener
la gráfica de la impedancia de entrada en el simulador SIMPLIS.
IN
OUT
=OUT/IN
TX1
P1
S1
VOUT
630.4u
irfb4710
L1
AC 100m 0
V7
VG1
irfb4710
VG2
Q9
D14
IDEAL
Q7
D13
IDEAL
VsGND
VG1GND
VG2GND
300n
Q6
VS
L2
48
V1
3.85u
C1
1
R2
TX2
P1
irfb4710
irfb4710
VG3
irfb4710
VG4
Q10
2.37u
C2
S1
D12
IDEAL
D11
IDEAL
172
R1
Q8
VG4
VS
VG1
VG2
VG3
X1
V6
VsGND
V3
V2
V5
V4
VG1GND VG2GND
Figura 4.10: Circuito simulado en SIMetrix/SIMPLIS con MOSFETs para obtener la impedancia de entrada.
En la figura 4.12 se muestra la respuesta en frecuencia de la Impedancia de entrada,
basada en las especificaciones definidas en la tabla 4.1.
59
4. Características en pequeña señal mediante simulación.
IN
OUT
=OUT/IN
TX1
P1
S1
VOUT
630.4u
L1
S1
D1
IDEAL
VG1
AC 100m 0
V2
S2 D2
IDEAL
VG2
D14
IDEAL
D13
IDEAL
300n
S5 D5
IDEAL
VS
48
V1
L2
TX2
P1
3.85u
C7
1
R2
S3
D3
IDEAL
VG2
VS
VG1
D12
IDEAL
S4
D4
IDEAL
VG1
2.37u
C2
172
R1
S1
D11
IDEAL
VG2
U1
BUF
V6
1.29
V10
X1
U3
V9
Figura 4.11: Circuito simulado en SIMetrix/SIMPLIS con interruptores ideales para obtener
la impedancia de entrada.
80
70
Magnitud (dB)
60
50
40
30
20
10
0
90
Fase (deg)
45
0
Modelo
Simulación con MOSFET
−45
simulacion ideal
−90
1
10
100
1k
10k
100k
1M
Figura 4.12: Impedancia de entrada obtenida con SIMPLIS y el Modelo promediado.
60
4.2. Función entrada-salida utilizando el programa PSIM
Igual que en la función de transferencia entrada-salida, el modelo se aproxima a la
respuesta obtenida con el simulador.
4.2.2.
Función de transferencia control-salida
Otra función de transferencia muy importante es la de control-salida del convertidor ACFBC, ya que involucra la variable de control (ciclo de trabajo) y la salida del
convertidor.
La función de transferencia control salida resulta al sustituir los valores de la tabla
4.1 en la ecuación 3.106 se obtiene:
v̂o (s)
−6.693x105 s3 − 1.309x1011 s2 − 2.525x1017 s + 4.847x1021
= 4
s + 2453s3 + 4.763x1011 s2 + 9.256x1014 s + 1.776x1019
dˆ(s)
(4.4)
La figura 4.13 muestra la gráfica de magnitud y fase de la función control-salida.
Diagrama de Bode
80
Magnitud (dB)
60
40
20
0
-20
-40
-60
360
315
Fase (deg)
270
225
180
135
90
45
0
1
10
100
1k
10k
Frecuencia (Hz)
100k
1M
10M
Figura 4.13: Función control-salida obtenida con SIMPLIS y el Modelo promediado.
Debido a problemas con el número de componentes en la versión demo del simulador
SIMetrix/SIMPLIS no se obtuvo la gráfica control-salida.
61
4. Características en pequeña señal mediante simulación.
4.2.3.
Variables de estado con respecto al ciclo de trabajo
En las figuras siguientes se muestran las gráficas de magnitud y fase de las funciones
de transferencia correspondientes a cada una de las variables de estado sobre el ciclo de
trabajo, obtenidas con el modelo promediado en pequeña señal.
Utilizando las especificaciones de la tabla 4.1 y al sustituirlos en la ecuación 3.111,
se obtiene la función de transferencia control-corriente del inductor de entrada:
îLin
1.154x105 s3 + 2.83x108 s2 + 5.472x1016 s + 2.124x1020
= 4
s + 2453s3 + 4.763x1011 s2 + 9.256x1014 s + 1.776x1019
dˆ
(4.5)
La figura 4.14 muestra la función de transferencia de la corriente del inductor de
î
entrada sobre el control Ldˆin .
Diagrama de Bode
60
Magnitud (dB)
40
20
0
-20
-40
-60
90
Fase (deg)
45
0
-45
-90
-135
1
10
100
1k
Frecuencia (Hz)
10k
100k
1M
Figura 4.14: Función corriente de entrada - control.
Para la función de transferencia del voltaje del capacitor del sujetador sobre el ciclo
de trabajo se obtiene:
2.203x1011 s2 − 1.009x1017 s + 1.958x1021
v̂Cs
= 4
s + 2453s3 + 4.763x1011 s2 + 9.256x1014 s + 1.776x1019
dˆ
62
(4.6)
4.2. Función entrada-salida utilizando el programa PSIM
La función de transferencia que representa la corriente en la inductancia de dispersión
sobre el ciclo de trabajo para las especificaciones es:
îLik
−1.17x106 s3 + 5.89x1011 s2 + 4.33x1016 s + 2.124x1020
= 4
s + 2453s3 + 4.763x1011 s2 + 9.256x1014 s + 1.776x1019
dˆ
(4.7)
A continuación se muestra la función de transferencia control - voltaje del capacitor
de salida:
v̂Co
−6.693x105 s3 − 1.309x1011 s2 − 2.525x1017 s + 4.847x1021
= 4
s + 2453s3 + 4.763x1011 s2 + 9.256x1014 s + 1.776x1019
dˆ
(4.8)
La función de transferencia control - voltaje del capacitor del sujetador se muestra
en la figura 4.15.
Diagrama de Bode
60
Magnitud (dB)
40
20
0
-20
-40
-60
360
Fase (deg)
270
180
90
0
-90
-180
1
10
100
1k
Frecuencia (Hz)
10k
100k
1M
Figura 4.15: Función voltaje del capacitor sujetador - control.
La figura 4.16 muestra la función de transferencia control - corriente de la inductancia
de dispersión.
63
4. Características en pequeña señal mediante simulación.
Diagrama de Bode
80
70
Magnitud (dB)
60
50
40
30
20
10
0
405
360
Fase (deg)
315
270
225
180
135
90
1
10
100
1k
Frecuencia (Hz)
10k
100k
1M
Figura 4.16: Función corriente de la inductancia de dispersión - control.
La función de transferencia control - voltaje del capacitor de salida se muestra en la
figura 4.17.
Diagrama de Bode
80
Magnitud (dB)
60
40
20
0
-20
-40
-60
360
315
Fase (deg)
270
225
180
135
90
45
0
1
10
100
1k
10k
Frecuencia (Hz)
100k
1M
Figura 4.17: Función voltaje del capacitor de salida - control.
64
10M
4.2. Función entrada-salida utilizando el programa PSIM
4.2.4.
Respuesta al escalón de entrada, teórico-simulación.
Una manera simple de obtener las características dinámicas de un sistema es mediante la aplicación de una señal escalón y observar su comportamiento. A partir de las
características de retardo, tiempo de subida, tiempo de asentamiento, etc., se puede establecer el tipo de sistema y los coeficientes que determinan la respuesta. Aunque este
tipo de prueba sólo da información de ciertas dinámicas (de primer orden). Utilizando las
especificaciones de la tabla 4.1 se obtienen los coeficientes para la función de transferencia
entrada-salida.
En la figura 4.18 se muestra el diagrama de bloques en el programa Simulinkr , para
obtener la respuesta de la función entrada-salida a un escalón de entrada utilizando la
ecuación 4.1.
6.696e19
s4 +2453s3 +4.763e11s2 +9.256e14s+1.776e19
Step
Scope
Transfer Fcn
Figura 4.18: Diagrama a bloques de la función de entrada-salida en Simulinkr.
Para validar la respuesta transitoria obtenida con el modelo promediado en pequeña
señal, se realizaron pruebas experimentales con el convertidor ACFBC. La figura 4.19
muestra el circuito impreso de la etapa de potencia y la etapa de control del convertidor.
(a) Etapa de potencia.
(b) Etapa de control.
Figura 4.19: Convertidor ACFBC.
65
4. Características en pequeña señal mediante simulación.
Para comparar los resultados obtenidos con el modelo en pequeña señal promediado, nuevamente se utilizó el programa SIMPLIS. La figura 4.20 muestra el diagrama
esquemático del convertidor ACFBC, con un escalón de entrada.
VOUT
630.4u
L1
S1
D1
IDEAL
VG1
S2 D2
IDEAL
VG2
D14
IDEAL
D13
IDEAL
300n
S5 D5
IDEAL
VS
V1
L2
TX2
P1
3.85u
C7
S3
D3
IDEAL
VG2
VS
D12
IDEAL
S4
D4
IDEAL
VG1
VG1
2.37u
C2
S1
D11
IDEAL
172
R1
VG2
U1
BUF
V6
1.29
V10
U3
V9
Figura 4.20: Circuito con escalón de entrada en SIMPLIS.
Para aplicar un escalón de voltaje en la entrada del convertidor ACFBC se implementó un circuito interruptor electrónico mostrado en la (figura 4.21). El cual utiliza un
multivibrador monoestable en modo no redisparable1 , para generar un pulso de disparo
que activa a un MOSFET.
VDD
U1
1
IN
100uF
U4B GND
14
CX/RX
12
11
2
4
13
A
Q
B
Q
10
R3
390
2
A
9
3
CLR
K
HCPL2611
1K
VO
GND
U3
6
1
5
2
4
3
R4
U2
IN
GND
GND
OUT
5
MIC4451
P1
R5
1K
VDD
C6
100nF
GND
GND
Figura 4.21: Circuito interruptor electrónico
1
66
C4
22uF
C2
22uF
MC14538BCP
S1
IT-2175
1
3
C1
0.1uF
VS
R10
Res1
1K
100uF
C5
C3
0.1uF
8
Res1
1K
3
VCC
R20
OUT
GND
2
C7
MC7805CT
Con el fin de evitar el efecto de rebote en el interruptor mecánico
Q1
IRFB4710
1
2
3
Header 3
4.2. Función entrada-salida utilizando el programa PSIM
La figura 4.22 muestra el circuito impreso del circuito de conmutación implementado.
Figura 4.22: Circuito de conmutación
La figura 4.23 muestra la respuesta transitoria del voltaje de salida para un escalón
de 5 volts en la entrada. En la gráfica se presentan los resultados obtenidos por medio del
modelo promediado en pequeña señal, el simulador SIMPLIS y el prototipo experimental
respectivamente.
35
Experimental
30
Modelo promediado
Voltaje de salida (Volts)
Simulador SIMPLIS
25
20
15
10
5
0
0.199
0.2
0.201
0.202
0.203
0.204
0.205
0.206
0.207
0.208
Tiempo (Segundos)
Figura 4.23: Respuesta al escalón de entrada de 5 volts.
Para obtener una valoración cuantitativa de la desviación presente entre el resultado
experimental y el modelo, se utiliza nuevamente el error relativo. La figura 4.24 muestra
el error relativo del modelo y SIMPLIS para un escalón de 5 volts.
67
4. Características en pequeña señal mediante simulación.
10
SIMPLIS
Modelo
9
8
7
Error(%)
6
5
4
3
2
1
0
0.199
0.2
0.201 0.202 0.203 0.204 0.205 0.206 0.207 0.208 0.209
Tiempo(Segundos)
Figura 4.24: Error para un escalón de entrada de 5 volts.
En el peor caso se obtiene un 9.2 % de error para el modelo. También se obtuvo la
respuesta transitoria para un escalón de entrada de 10 volts y 15 volts. Los resultados se
muestran en las figuras 4.25 y 4.26, respectivamente.
Experimental
60
Modelo Promediado
Simulador SIMPLIS
Voltaje de salida (Volts)
50
40
30
20
10
0
0.199
0.2
0.201
0.202
0.203
0.204
0.205
0.206
0.207
0.208
Tiempo (Segundos)
Figura 4.25: Respuesta al escalón de entrada de 10 volts.
68
4.2. Función entrada-salida utilizando el programa PSIM
100
90
Experimental
Modelo promediado
Voltaje de salida (Volts)
80
Simulador SIMPLIS
70
60
50
40
30
20
10
0
0.199
0.2
0.201
0.202
0.203
0.204
0.205
0.206
0.207
0.208
Tiempo (Segundos)
Figura 4.26: Respuesta al escalón de entrada de 15 volts.
En las figuras 4.27 y 4.28 se muestra el error relativo obtenido para un escalón de
entrada de 10 volts y 15 volts. Para el escalón de 10 volts se obtiene un error máximo de
9.238 % y 9.124 % para 15 volts en el modelo promediado.
10
SIMPLIS
Modelo
9
8
7
Error(%)
6
5
4
3
2
1
0
0.199
0.2
0.201 0.202 0.203 0.204 0.205 0.206 0.207 0.208 0.209
Tiempo(Segundos)
Figura 4.27: Error para un escalón de entrada de 10 volts.
69
4. Características en pequeña señal mediante simulación.
10
SIMPLIS
Modelo
9
8
7
Error(%)
6
5
4
3
2
1
0
0.199
0.2
0.201 0.202 0.203 0.204 0.205 0.206 0.207 0.208 0.209
Tiempo(Segundos)
Figura 4.28: Error para un escalón de entrada de 15 volts.
De igual forma que en los casos anteriores se obtuvo la respuesta en el voltaje de
salida, para un escalón de entrada de 20 volts (figura 4.29) y 25 volts (figura 4.31).
Experimental
120
Modelo promediado
Simulador SIMPLIS
Voltaje de salida (Volts)
100
80
60
40
20
0
0.199
0.2
0.201 0.202 0.203 0.204 0.205 0.206 0.207 0.208
Tiempo (Segundos)
Figura 4.29: Respuesta al escalón de entrada de 20 volts.
70
4.2. Función entrada-salida utilizando el programa PSIM
A continuación se muestra el error relativo para un escalón de entrada de 20 volts.
En el peor caso se obtiene un 7.391 % de error en el modelo promediado.
8
SIMPLIS
Modelo
7
6
Error(%)
5
4
3
2
1
0
0.199
0.2
0.201 0.202 0.203 0.204 0.205 0.206 0.207 0.208 0.209
Tiempo(Segundos)
Figura 4.30: Error para un escalón de entrada de 20 volts.
160
Experimental
Modelo promediado
140
Simulador SIMPLIS
Voltaje de salida (Volts)
120
100
80
60
40
20
0
0.199
0.2
0.201
0.202
0.203
0.204
0.205
0.206
0.207
0.208
Tiempo (Segundos)
Figura 4.31: Respuesta al escalón de entrada de 25 volts.
71
4. Características en pequeña señal mediante simulación.
En la figura 4.32 se muestra el error relativo para el caso de un escalón de 25 volts.
En este caso el error máximo es de 9.359 %.
10
SIMPLIS
Modelo
9
8
7
Error(%)
6
5
4
3
2
1
0
0.199
0.2
0.201 0.202 0.203 0.204 0.205 0.206 0.207 0.208 0.209
Tiempo(Segundos)
Figura 4.32: Error para un escalón de entrada de 25 volts.
La figura 4.33 muestra la transición en el voltaje de salida para un escalón de entrada
de 30 volts.
200
180
Experimental
Modelo promediado
160
Voltaje de salida (Volts)
Simulador SIMPLIS
140
120
100
80
60
40
20
0
0.199
0.2
0.201
0.202 0.203
0.204
0.205 0.206
0.207 0.208
Tiempo (Segundos)
Figura 4.33: Respuesta al escalón de entrada de 30 volts.
72
4.2. Función entrada-salida utilizando el programa PSIM
De igual forma que en los casos anteriores se muestra la gráfica del error relativo
para el escalón de entrada de 30 volts. En este caso el error del modelo es 16.83 % y
14.92 % para el simulador SIMPLIS.
18
SIMPLIS
16
Modelo
14
Error (%)
12
10
8
6
4
2
0
0.199
0.2
0.201 0.202 0.203 0.204 0.205 0.206 0.207 0.208 0.209
Tiempo (Segundos)
Figura 4.34: Error para un escalón de entrada de 30 volts.
Todas las gráficas presentadas anteriormente se puede observar una gran similitud
entre los resultados obtenidos para el convertidor ACFBC por simulación, por el modelo
en pequeña señal y el prototipo experimental. Cabe señalar que las pruebas experimentales se realizaron en lazo abierto.
Para obtener las gráficas del error relativo se tomaron ochenta y tres muestras de
cada gráfica de respuesta al escalón.
En todas las gráficas se muestra un error mayor en el primer sobre-impulso y en
el primer sub-impulso de la respuesta transitoria; para el resto de la respuesta, el error
es menor y aproximadamente cero en algunos casos. El error presente en los resultados
obtenidos se debe principalmente a la idealización de los componentes del convertidor
ACFBC durante el modelado.
En las gráficas de escalón de entrada se observa una característica muy importante de
los sistemas que almacenan energía: no responden instantáneamente y exhiben respuestas
transitorias cada vez que están sujetos a perturbaciones [8].
73
4. Características en pequeña señal mediante simulación.
La figura 4.35 muestra la respuesta transitoria del voltaje de salida para un escalón
en la entrada de 48 volts.
300
Modelo promediado
250
Voltaje de salida (Volts)
Simulador SIMPLIS
200
150
100
50
0
0.199
0.2
0.201 0.202 0.203 0.204 0.205 0.206 0.207 0.208
Tiempo (Segundos)
Figura 4.35: Respuesta al escalón de entrada de 48 volts.
La forma de onda experimental no se obtuvo para este caso debido a que el voltaje
de salida se eleva por arriba del nivel máximo soportado por el capacitor de salida del
convertidor ACFBC.
4.3.
Respuesta del convertidor ACFBC con variación
en los parámetros de diseño.
Existen varias restricciones en el diseño del convertidor ACFBC, las cuales dan lugar
a diferentes valores posibles para algunos componentes. Para observar el impacto de estos
parámetros en la respuesta del convertidor, en las secciones siguientes se muestra el efecto
del capacitor del sujetador activo Cs y la inductancia de dispersión Lik .
74
4.3. Respuesta del convertidor ACFBC con variación en los parámetros de diseño.
4.3.1.
Respuesta al escalón de entrada con variaciones en Cs
Existen parámetros críticos en el diseño del convertidor ACFBC (capítulo 2). Por
ejemplo, el valor del capacitor del sujetador activo Cs y la inductancia de dispersión del
transformador Lik ; estos valores determinan si el convertidor opera a ZVS, por lo tanto
son de vital importancia. Pero además, los valores de estos componentes también juegan
un papel importante en la respuesta dinámica del convertidor.
En esta sección se muestra el efecto que tiene el capacitor Cs sobre la respuesta en
la tensión de salida en el convertidor ACFBC.
La figura 4.36 muestra la respuesta del convertidor ACFBC a un escalón de entrada
para diferentes valores de capacitor Cs .
6
Cs = 2.2uF
Cs = 4.7uF
Cs = 10uF
Cs = 22uF
Amplitud Normalizada (Volts)
5
4
3
2
1
0
0.2
0.201
0.202
0.203
0.204
0.205
0.206
0.207
0.208
0.209
Tiempo (Segundos)
Figura 4.36: Respuesta al escalón para diferentes valores de Cs .
Se observa que al incrementar el valor del capacitor Cs , también aumenta el tiempo
de establecimiento de la salida y los sobretiros de tensión. Por lo cual, hay que seleccionar
el menor valor posible para mejorar la respuesta transitoria.
75
4. Características en pequeña señal mediante simulación.
Como se muestra en la 4.37, las variaciones en la inductancia de dispersión Lik no
provocan ningún efecto en el tiempo de establecimiento del voltaje de salida, su valor se
selecciona de acuerdo a la restricción de conmutación suave que se requiera.
7
LIK = 300nH
6
L
IK
= 600nH
Amplitud Normalizada (Volts)
LIK = 1uH
L
5
IK
= 2uH
4
3
2
1
0
0
1
2
3
Tiempo (sec)
4
5
6
−3
x 10
Figura 4.37: Respuesta al escalón para diferentes valores de Lik .
4.3.2.
Funciones de transferencia con variaciones en Cs
Para conocer los efectos de la variación del capacitor Cs en la función de entradasalida se utilizaron los cuatro valores de la sección anterior, los resultados se muestran
en la figura 4.38.
Se puede ver que el valor de Cs afecta directamente a la frecuencia de corte de la
función de transferencia y por lo tanto el ancho de banda disponible. Al tener un capacitor
más grande el ancho de banda es menor.
La impedancia de entrada Zin del convertidor también es importante, ya que determina la estabilidad del convertidor con una etapa de entrada. La figura 4.39 muestra la
función Zin para diferentes valores de Cs .
76
4.3. Respuesta del convertidor ACFBC con variación en los parámetros de diseño.
Diagrama de Bode
50
Magnitud (dB)
0
−50
Cs = 2.2 uF
−100
Cs = 4.7 uF
Cs = 10 uF
−150
Cs = 22 uF
−200
0
−45
Fase (deg)
−90
−135
−180
−225
−270
−315
−360
100
1k
10k
Frecuencia (Hz)
100k
1M
Figura 4.38: Función E/S para diferentes valores de Cs .
Diagrama de Bode
80
Magnitud (dB)
70
60
Cs = 2.2uF
50
Cs = 4.7uF
40
Cs = 10uF
Cs = 22uF
30
20
10
0
−10
135
Fase (deg)
90
45
0
−45
−90
1
10
100
1k
Frecuencia (Hz)
10k
100k
1M
Figura 4.39: Función de impedancia de entrada para diferentes valores de Cs .
77
4. Características en pequeña señal mediante simulación.
Nuevamente, el capacitor Cs influye en la frecuencia de corte y además sobre el valor
mínimo de la impedancia de entrada.
Por último, en esta sección se analiza el efecto que tiene el capacitor del sujetador
activo sobre la función de transferencia control-salida. Esta función es de gran importancia, debido a que proporciona información sobre la variable de control del sistema (el
ciclo de trabajo D).
En la figura 4.40 se muestra la respuesta de la función control-salida para cuatro
valores de Cs . Se puede observar que en este caso también se reduce el ancho de banda
al incrementar el valor del capacitor CS .
Diagrama de Bode
70
60
Magnitud (dB)
50
40
30
20
10
0
Cs = 2.2uF
C = 4.7uF
s
Cs = 10uF
Cs = 22uF
−10
−20
360
315
Fase (deg)
270
225
180
135
90
45
0
10
100
1k
10k
100k
1M
Frecuencia (Hz)
Figura 4.40: Función control salida para diferentes valores de Cs .
4.3.3.
Función de transferencia con variaciones en Lik
La inductancia de dispersión Lik tiene influencia sobre las pérdidas de potencia en el
convertidor ACFBC, así como, en la conmutación a voltaje cero [2], [5]. En esta sección
se estudiará el efecto que presenta sobre las funciones de transferencia.
La figura 4.41 muestra la respuesta obtenida en la función de entrada-salida para
cuatro valores de Lik (300 nH, 600 nH, 1 µH y 2 µH).
78
4.3. Respuesta del convertidor ACFBC con variación en los parámetros de diseño.
Diagrama de Bode
50
Magnitud (dB)
0
−50
L = 300nH
ik
−100
Lik = 600nH
L = 1uH
ik
−150
Lik = 2uH
−200
0
−45
Fase (deg)
−90
−135
−180
−225
−270
−315
−360
100
1k
10k
Frecuencia (Hz)
100k
1M
Figura 4.41: Función E/S para diferentes valores de Lik .
En la gráfica anterior se aprecia que la inductancia Lik sólo tiene un efecto en alta frecuencia. La figura 4.42 muestra el efecto de la inductancia Lik en la función de
transferencia control-salida.
Diagrama de Bode
60
50
Magnitud (dB)
40
30
20
Lik = 300nH
10
Lik = 600nH
0
Lik = 1uH
Lik = 2uH
−10
−20
360
315
Fase (deg)
270
225
180
135
90
45
0
10
100
1k
10k
100k
1M
Frecuencia (Hz)
Figura 4.42: Función control-salida para diferentes valores de Lik .
79
4. Características en pequeña señal mediante simulación.
Al igual que en la función entrada-salida, el efecto de Lik se percibe en una frecuencia
cercana a la frecuencia de conmutación.
Las variaciones de la inductancia de dispersión no tienen efecto alguno sobre la
impedancia de entrada del convertidor ACFBC.
80
Capítulo 5
Conclusiones generales y trabajos
futuros
Para finalizar, en este capítulo se presentan las conclusiones generales del documento
de tesis y los trabajos futuros propuestos.
5.1.
Conclusiones generales
Las características dinámicas del sistema de alimentación conmutado determinan sus
beneficios, y primordialmente el diseño del controlador adecuado para cumplir las especificaciones planteadas. Las ecuaciones que describen la dinámica de un sistema (modelo)
pueden obtenerse a partir de distintas técnicas de análisis. Por ejemplo, existen técnicas como variables de estado promediado, interruptor de tres terminales (PWM Switch),
método de la función descriptiva, etc. Cada una de estas técnicas tiene sus ventajas y
limitaciones, y el uso de alguna de ella será de acuerdo al objetivo final.
El diseño del controlador (sistema en lazo cerrado) para una fuente de alimentación
conmutada se realiza normalmente muy por debajo de la frecuencia de conmutación (1/4
ó 1/5 de la frecuencia de conmutación), de esta manera se rechazan componentes de la
frecuencia de conmutación y se evita retroalimentar rizado de alta frecuencia. Entonces, si
la idea principal del modelo es el diseño del controlador, entonces una técnica de modelado
81
5. Conclusiones generales y trabajos futuros
que abarque estas frecuencias será adecuado. Al respecto, la técnica de variables de estado
promediado es un método que ha demostrado efectividad para representar la dinámica de
los sistemas de alimentación conmutado hasta la mitad de la frecuencia de conmutación.
Esto lo hace adecuado para aplicarse a sistemas en donde la idea principal es el diseño
del controlador.
Los sistemas basados en baterías exigen ciertas características de la interface entre la entrada y la carga, tales como, buena dinámica, corriente de entrada no-pulsante,
aislamiento eléctrico, alta eficiencia, etc. Precisamente el convertidor elevador puente
completo aislado ha demostrado cumplir en buena medida con estas exigencias. Desafortunadamente, no se ha presentado un análisis de las características dinámicas de este
convertidor. En este sentido, el objetivo principal de la tesis es encontrar un modelo que
represente las características dinámicas de ese convertidor teniendo como meta principal
el diseño del controlador. De esta forma, la técnica de variable de estado promediado
obtiene las características de manera precisa y suficiente para esas metas.
Específicamente, la técnica de variable de estados promediados consiste en promediar
los circuitos equivalentes que se presentan en un periodo de conmutación, así como,
perturbar y linealizar las ecuaciones de estado. De esta manera se obtienen un conjunto
de ecuaciones lineales y continuas, además se puede dibujar un circuito lineal y continuo.
A partir de las ecuaciones lineales continuas, o del circuito equivalente lineal se pueden
obtener las características dinámicas del convertidor. Esto es, se obtienen características
tales como audio - susceptibilidad (función de transferencia entrada - salida), función
de transferencia control - salida, función de transferencia de los estados - control, y las
impedancias de entrada y salida.
Al aplicar la técnica de variables de estado promediado se obtuvieron las funciones de
transferencia que muestran las características dinámicas del convertidor. Como se observa
en las ecuaciones, el convertidor elevador puente completo aislado con sujetador activo es
un sistema de cuarto orden. Sin embargo, un par de polos se localizan en alta frecuencia,
haciendo parecer al sistema como uno típico de segundo orden.
En el convertidor elevador puente completo con sujetador activo, el capacitor que
realiza la función de sostener la tensión del bus intermedio (mantener los esfuerzos en
ciertos niveles) y la inductancia de dispersión influyen en la dinámica del convertidor, es
decir contribuyen cada uno con un polo en la respuesta en la frecuencia. Como se mostró,
estos elementos también determinan el rango de conmutación suave en los dispositivos
semiconductores. La contribución de estos elementos en la respuesta en frecuencia no es
de la misma importancia desde el punto de vista del diseño del controlador. Esto es, el
capacitor sí modifica la respuesta en el rango de baja frecuencia, que es la frecuencia
82
5.2. Trabajos futuros
donde se diseña el controlador; mientras que la inductancia de dispersión modifica la
respuesta en alta frecuencia. Esto último hay que tomarlo con reservas, ya que se sabe
que el modelo obtenido con variables de estado promediado difiere ligeramente en alta
frecuencia.
Al observar la respuesta del sistema con variaciones del valor del capacitor del clamp
se concluye que el sistema reduce su factor de amortiguamiento al incrementar el valor
del capacitor, provocando que el sobre impulso sea mayor. Pero la reducción del capacitor
provoca que la tensión sujetada tenga variaciones. Es decir, existe compromiso entre la
respuesta transitoria y la efectividad del circuito de sujeción activa.
Además este trabajo de investigación muestra todas las características dinámicas
para la mejor selección del controlador del convertidor.
En resumen las conclusiones más importantes son:
• Los simuladores SIMPLIS y PSIM dan respuesta muy próxima a las obtenidas
mediante el análisis matemático.
• El convertidor elevador puente completo aislado con sujetador activo es un sistema
de cuarto orden. Sin embargo, un par de polos se localizan en alta frecuencia y el
sistema responde como típicamente uno de segundo orden.
• El capacitor del clamp influye directamente en la respuesta en bajas frecuencia,
siendo crítico para el diseño del controlador en lazo cerrado.
• El sistema tiene factor de amortiguamiento bajo, lo que implica sobre impulsos considerables para ser tomados en cuenta para el dimensionamiento de los dispositivos
semiconductores y pasivos.
5.2.
Trabajos futuros
En el trabajo desarrollado se utilizó una técnica que promedia y linealiza las formas
de onda, esto provoca que se desechen ciertas dinámicas que si se conocieran se podría
mejorar el desempeño del sistema en lazo cerrado. Con base a esto, se propone realizar
el modelo con alguna técnica que incluya dinámicas de mayor frecuencia, ésta podría ser
el método de la función descriptiva extendida (extended describing function method ).
Po otro lado, se propone el diseño del controlador para el sistema en lazo cerrado con
las predicciones realizadas del comportamiento del sistema. Esto mostraría la efectividad
de la técnica cuando se aplica al convertidor elevador con sujetador activo cuando el
83
5. Conclusiones generales y trabajos futuros
objetivo es el diseño del controlador.
Con el trabajo realizado se proporcionan las características suficientes del sistema
para implantar algoritmos de control con más de un lazo de control. Es decir, se propone
la utilización de los resultados obtenidos a la implementación de un algoritmo de control
en modo corriente o multi-variable
84
Referencias
[1]
Andrés Augusto Noguerias Meléndez, “Nueva Metodología de Modelado y Simulación No Lineal. Aplicaciones a Convertidores PWM continua/continua en Paralelo de Alto Rendimiento”, Tesis Doctoral; universidad de Vigo. 20 de Junio de 2003.
http://www.dte.uvigo.es/tesis/andres.nogueiras/capitulo-1.pdf
[2]
Molina Coronel, J. “Estudio del Convertidor Puente Completo Aislado
con Sujetador Activo Aplicado a Celdas de Combustible” Tesis de Maestría, Centro nacional de investigación y desarrollo tecnológico, 2006. Cuernavaca,
Morelos. México.
[3]
Watson, R. F.C. Lee; “A Soft-Switched, Full-Bridge Boost Converter Employing an Active Clamp Circuit”, IEEE PESC 96; pp. 412-418.
[4]
Yakushev V., Meleshin V. and Fraidlin S; “Full-Bridge Isolated Current Fed
Converter with Active Clamp”, APEC 99. vol. 1 14-18 marzo 1999, pp. 560566.
[5]
Yonghan Kang, “Design and Implementation of High Efficiency, High Power Density Front-End Converter for High Voltage Capacitor Chrager”.
Tesis de Maestría, Virginia Polytechnic Institute and State University, 2005; Blacksburg, VA.
[6]
André S. Kislovski, Redl, Sokal, “Dynamic Analysis of Switching-Mode
DC/DC Converters”; Editorial Van Nostrand Reinhold, New York. 1991.
85
Referencias
[7]
Slobodan cuk, R. D. Middlebrook, “Modeling, analysis and design of switching converters”. National aeronautics and space administration. NASA CR135174.
[8]
Katsuhiko Ogata “Ingeniería de Control Moderna”. Segunda Edición, Editorial Prentice Hall. 1993.
[9]
Arthur F. Witulski and Robert W. Erickson. “Extension of State-Space Averaging to Resonant Switches and Beyond”, Power Electronics, IEEE Transactions on Volume 5, 1990. pp. 98-109.
[10]
Moussa, Wisam M.; Morris, James E.; “Comparison Between State Space
Averaging and PWM Switch for Switch Mode Power Supply Analysis”;
IEEE,1990. pp. 15-21.
[11]
Vorperian, Vatché; “Simplified Analysis of PWM Converters Using The
Model of PWM Switch Part I: Continuous Conduction Mode”, IEEE
Transactions on Aerospace and Electronics Systems, Vol. 26, N◦ 3, May 1990. pp.
490-496.
[12]
Vorperian, Vatché; “Simplified Analysis of PWM Converters Using The
Model of PWM Switch Part II: Discontinuous Conduction Mode”, IEEE
Transactions on Aerospace and Electronics Systems, Vol. 26, N◦ 3, May 1990. pp.
497-505.
[13]
E. X. Yang, L. Guo, F. C. Lee; “Describing Function Method in Modeling of Switching Converters”. Proceedings of the Virginia Power Electronics
Conference; Blacksburg, VA; Sept, 19-21, 1993; pp 27-44.
[14]
Mateos Rodríguez, Ricardo, “Aplicación del método de la función descriptiva en balastros electrónicos auto-oscilantes operando a frecuencias de
hasta 2.5 MHz”. Centro nacional de investigación y desarrollo tecnológico, 2007.
Cuernavaca, Morelos. México.
[15]
E. X. Yang, Extended Describing Function Method for Small-Signal Modelling of Resonant and Multi-Resonant Converters; Tesis de Maestría,
Virginia Polytechnic Institute and State University, 1994; Blacksburg, VA.
[16]
J. O. Groves, Small-Signal Analysis Using Harmonic Balance Methods;
IEEE Power Electronics Specialists Conf. 1991, pp 74-79.
86
Referencias
[17]
E. X. Yang, F. C Lee “Extended Describing Function Method for Small
Signal Modeling of Switching Power Circuits” Proceedings of the Virginia
Power Electronics Conference; Blacksburg, VA; Sept, 11-13, 1994;
[18]
SIMPLIS Reference Manual; catena software Ltd. 24 de agosto del 2004.
[19]
Sourcia Navarro, Luis A. “Implementación de modelos físicos de dispositivos semiconductores de potencia (Diodo y MOSFET) en MATLABSimulink”. Centro nacional de investigación y desarrollo tecnológico, 2006. Cuernavaca, Morelos. México.
[20]
PSIM User‘s Guide, Powersim Inc. Version 6.0 Rev. 1 January 22, 2004
[21]
Y. Qiu, M. Xu, K. Yao, J. Sun, and F.C. Lee, “Multifrequency Small-Signal
Model for Buck and Multiphase Buck Converters”, IEEE Transaction on
Power Electronics, Vol. 21, No. 5. September 2006, pp. 1185-1192.
[22]
Min Chen, Jian Sun; “Reduced-Order Averaged Modelling of ActiveClamp Converters”. IEEE Transactions on Power Electronics, Vol. 21, No.2,
March 2006. pp. 487-494.
[23]
Krein, P.T.; Bentsman, J.; Bass, R.M.; Lesieutre, B.L. “On the Use of Averaging for the Analysis of Power Electronic Systems”. IEEE transactions on
Power Electronics, vol. 5, 1990. pp. 182-190.
[24]
Y. Kang, J. D Lavers; “Power Electronics Simulation: Current Progress
and Future Development”. Computers in Power Electronics, IEEE 4th Workshop on, 1994, pp. 169-174.
[25]
Mathews, John. H, kurtis D. Fink; “Métodos Numéricos con MatLab”. Tercera Edición, Editorial Prentice Hall. 2000. pp. 26.
87
Referencias
88