Regulación Automática de Glucosa en Pacientes Diabéticos
Anuncio

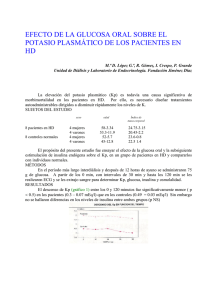
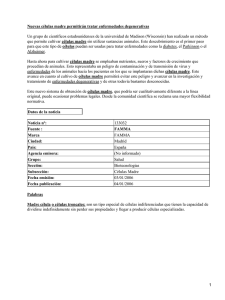
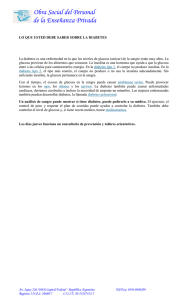
1 Regulación Automática de Glucosa en Pacientes Diabéticos Insulinodependientes. Guillermo R. Cocha*, Melina Podestá**, Carlos E. D’Attellis*** *U.T.N. Facultad .Regional La Plata., [email protected] **Universidad Favaloro ***Grupo de Ing. Clínica U.T.N. Rectorado, Escuela de Ciencia y Tecnología, UNSAM. Resumen—La Diabetes Mellitus Insulino Dependiente es una enfermedad de gran implicancia social, que produce un grave deterioro del sistema cardiovascular, renal, etc. Se ha demostrado que la forma más eficaz de prevenir estas complicaciones es por medio de la infusión continua y controlada de insulina. En la actualidad se dispone de sensores continuos de glucosa y bombas dosificadoras de insulina portables. Todavía falta agregar al conjunto “bomba-sensor” la inteligencia necesaria para cerrar el lazo de control de forma tal que el sistema se vuelva “transparente” para el paciente. Además, dado que los procesos biológicos son no lineales, cualquier solución posible debe considerar necesariamente esta característica. Por esta causa, nuestro enfoque del problema hace uso de una bien conocida herramienta dentro del control no lineal, ampliamente usada y probada en otras áreas de la ingeniería como son la linealización exacta y el desarrollo de observadores no lineales. El presente trabajo plantea una estrategia de control no lineal basada en un modelo matemático de la dinámica de la glucosa-insulina, que por medio de la medición de la concentración de la glucosa en sangre y la estimación del resto de las variables, realiza la regulación de la concentración de glucosa en sangre frente perturbaciones exógenas, y que forma parte de un modelo más completo en desarrollo. Los resultados obtenidos en las simulaciones permiten observar que esta estrategia de control tiene ventajas interesantes respecto a otros métodos propuestos. Palabras clave— Diabetes Mellitus, Control No Lineal, Observadores de Estado. Referencia— Este trabajo se desarrolla en el marco del proyecto “Modelización de la Diabetes Mellitus. Propuestas de Control No Lineal” de la Universidad Tecnológica Nacional dentro del “Programa de Ingeniería Clínica y Bioingeniería” y se lleva a cabo en las Facultades Regionales La Plata y San Nicolás de la U.T.N. y en la Escuela de Ciencia y Tecnología de la Universidad Nacional de San Martín. I. INTRODUCCIÓN a Diabetes Mellitus es un conjunto de enfermedades que se caracterizan por el incremento de los niveles de concentración de glucosa en sangre. En la Diabetes Insulino Dependiente o Diabetes Tipo 1(DMT1) y en etapas avanzadas de la Diabetes Tipo 2 (DMT2), se requiere la administración regular de insulina. La terapia tradicional de la enfermedad consiste en la administración de dosis de insulina junto con la medición de los valores de glucemia, durante el día. Estudios clínicos como Diabetes Control and Complications Trial (DCCT) [1] llevado a cabo desde 1983 hasta 1993 ha demostrado que mantener los niveles de L glucosa lo más cerca posible de los valores de un individuo sano permite disminuir en forma dramática de las complicaciones de la enfermedad. El estudio,que involucró a casi 1500 voluntarios que sufrían de DMT1, comparó los efectos de la terapia tradicional con los de un control intensivo de los valores de glucemia, manteniendo los valores de A1C dentro de un rango de un 6% respecto de los valores de un individuo sano. Al DCCT le siguió el Epidemiology of Diabetes Interventions and Complications (EDIC) [1], que es un estudio clínico que compara las complicaciones derivadas de la enfermedad cuando se usa terapia tradicional y las que se producen cuando el control es intensivo, así como un análisis de costos cuando se usa el control intensivo. Del DCCT surgen algunos datos interesantes, como son por ejemplo, que usando el control intensivo, el riesgo de sufrir retinopatía diabética disminuye en un 76 %; el de sufrir una enfermedad de los riñones, un 50%, y se tiene un 50% menos de probabilidades de sufrir problemas relacionados con el sistema nervioso. En cuanto al EDIC, demostró que existe un 42% menos de probabilidades de sufrir un evento cardíaco fatal y un 57% de un evento cardiovascular no mortal con el control intensivo. Estos datos son importantes también para los afectados de DMT2 ya que el deterioro de las paredes arteriales es similar en ambas enfermedades. Si bien la DMT2 puede tratarse con hipoglucemiantes orales, se ha encontrado evidencia que el tratamiento temprano con insulina mejora el pronóstico de la enfermedad a largo plazo [2]. En casos de complicaciones, el tratamiento intensivo en Unidades de Cuidados Intensivos permite una mejoría sustancial en el cuadro clínico [3]. Todos estos datos muestran la importancia del monitoreo y del control estricto de la glucemia. Para mantener los valores de glucosa dentro de un rango normal, la infusión continua de insulina tiene ventajas respecto de la inyección subcutánea varias veces al día. En cuanto a la tecnología de las bombas de infusión de insulina y los sensores continuos de glucosa se ha evolucionado mucho desde la época del Biostator, el primer equipo desarrollado para el control de la glucosa [4] pero todavía quedan varias cuestiones a resolver, ya que la concentración de glucosa en sangre depende de un complejo equilibrio neurológico y hormonal muy difícil de estimar. Desde el punto de vista de la instrumentación de un proceso, aunque solo podemos medir los valores de glucosa a nivel intravenoso (IV) o subcutáneo (SC), sabemos que el 2 sistema glucoregulatorio utiliza hormonas como el glucagón entre otras [5], en tanto que la ingestión de alimentos, la actividad física o los niveles de stress afectan la absorción celular de glucosa o su liberación en el hígado. Desde el punto de vista del control basado en modelo, el uso de variables de estado que no están disponibles en forma directa implica el desarrollo de observadores de estado [6], [7]. A fin de evitar los retardos producidos por la medición subcutánea de glucosa y la infusión subcutánea de insulina, se ha considerado la medición intravenosa de glucosa y la infusión intravenosa de insulina. Se conoce que el suministro de insulina por vía subcutánea no es fisiológico ya que el páncreas secreta insulina directamente al sistema circulatorio a través de la vena porta, mientras que si se realiza la infusión a nivel subcutáneo se debe considerar el retardo que se produce en la acción de la insulina que debe llegar al torrente sanguíneo y luego al compartimiento extracelular. El tiempo necesario para que se realice este proceso es variable de paciente a paciente, y aún en el mismo paciente, varía según el horario del día, condición física, tipo de ingesta, velocidad a la cual se lleva a cabo la ingesta, etc. Ello plantea dificultades a los algoritmos de control, ya que una sobredosificación de insulina inducirá episodios de hipoglucemia. Respecto a la monitorización continua de glucosa se observan problemas de exactitud y gran dispersión en la medición, afectando especialmente al rango de valores basales con el riesgo de provocar hipoglucemia. Esto es una limitación en la utilidad práctica de los dispositivos portables, también llamados “páncreas artificial”, que necesariamente, siguen la ruta SC-SC, ya que el acceso por vía IV expone al usuario en el uso ambulatorio del dispositivo al riesgo de infecciones. Sin embargo, cuando el paciente se encuentra internado en una Unidad de Cuidados Intensivos, tiene normalmente canalizaciones venosas para el monitoreo de signos vitales y la administración de medicamentos. Es decir, sin entrar a considerar las complicaciones propias del acceso SC, todavía es posible el desarrollo de un dispositivo de control con una aplicación práctica de gran importancia terapéutica. Otra razón para utilizar un modelo IV-IV es que nos permite analizar con más detenimiento la dinámica de la glucosa en las cercanías del valor basal. En condiciones de ayuno nocturno, la absorción de glucosa es realizada predominantemente por las células nerviosas, de un modo independiente de la acción de la insulina, ya que en el tejido nervioso el ingreso de glucosa se produce debido al gradiente de concentración entre los medios extracelular e intracelular, haciendo que el control en estas condiciones se vuelva extremadamente no lineal. Los algoritmos de control utilizados hasta el momento incluyen métodos de control lineal y no lineal, basados en modelos o usando lógica difusa y redes neuronales. Una reciente recopilación de modelos y métodos de control puede verse en [8]. del control de procesos es importante que el modelo usado describa lo esencial de la dinámica del proceso pero que, al mismo tiempo, sea lo más simple posible. Uno de los modelos adecuados para el control es el modelo de Bergman (MMB) [12], [13], llamado “de mínima” porque es el que usa la menor cantidad de ecuaciones. El modelo original es un modelo de dos compartimientos cuyas ecuaciones están dadas por ; ; 0 , (1) 0 0, (2) Donde la ecuación (1) representa el compartimiento vascular de la glucosa G expresada en mmoles/L, la ecuación (2) es una función auxiliar que representa la capacidad de absorción de glucosa por los tejidos insulinodependientes y es proporcional a la concentración de insulina en el tejido intersticial, también llamado compartimiento remoto [mU/L], I es la concentración de insulina en plasma [mU/L]. Gb e Ib son los valores basales de glucosa e insulina respectivamente en tanto que es la efectividad la Glucosa en tanto que la sensibilidad a la Insulina, se puede expresar como el cociente . El modelo es usado para realizar el Test de Tolerancia Intravenosa a la Glucosa (IVGTT), en el cual se inyecta por vía endovenosa un bolo de glucosa y se observa su evolución temporal, tomando muestras periódicas de los valores de glucosa e insulina a nivel plasmático. En la Fig. 1 se muestra un ejemplo de los datos obtenidos de un estudio IVGTT. Adquirió utilidad para el control gracias al agregado de tercera ecuación El modelo ampliado en [11] está dado por 3 , , 4 , 5 la variable t representa el tiempo transcurrido luego de la ingestión inicial de glucosa, es la tasa de liberación de insulina pancreática luego del bolo de insulina; h es el umbral de concentración de glucosa por debajo del cual no hay liberación de insulina. V es el volumen de distribución de Insulina y n es la tasa de decaimiento de insulina en sangre en tanto que u es la entrada externa de insulina, en nuestro caso, el control. P1, P2 y P3 son parámetros del modelo que dependen del sujeto o paciente. En el caso de un paciente con DMT1, la ecuación (5) se convierte en la (6) ya que no hay producción endógena de insulina, u(t)/V. II. MATERIALES Y MÉTODOS A. El modelo matemático. Los modelos matemáticos que describen la dinámica del sistema glucoregulatorio, ([9], [10] y [11] son ejemplos de ellos), son variados y su complejidad varía desde los muy detallados hasta los más simples. Desde el punto de vista Fig. 1: Valores típicos de un estudio IVGTT 6 3 0 O *0 0 Con Una forma equivalente de expresar al conjunto (3),(4),(6) es la que se presenta en [14], está más extendida en el presente y es la que se usará en el presente trabajo , , / Este sistema no lineal puede ser expresado en forma canónica # $% &% ( )%, 7 donde x es un vector n- dimensional y u es el control escalar. Así, el MMB queda como * + , / % . 10 0 , 0 - (t), 1 (9) B. Control geométrico no lineal. Existen procesos donde el sistema es no lineal en sus estados y lineal en su control. Si el sistema tiene su grado relativo igual al número de estados y si x0 es un punto de equilibrio del sistema podemos efectuar la transformación (11) que convierte al sistema no lineal en uno lineal y controlable. % 1 67 % : . 11 1 * 2 + Φ1 5 2 13 38 467 %9 con 8 ;1 6@ 638 7 Φ 1, =1 637 AΦ8 zC. (12) 13 14 El término v es el componente no lineal del control que puede ser sintonizado por métodos de control lineal [6]. En base a [19] y teniendo en cuenta las condiciones 1. y 2. es posible determinar el grado relativo r del sistema en un entorno de x0 6@ 6G7 % 0, 6@ 6L8 7 %M N 0 DEFFó 1. H 0, 1, … , J 2. DEFFó2. En el caso del MMB, tiene un grado relativo igual a 3, igual al número de estados, con lo cual podemos desarrollar un control lineal de la forma. 1 O1 P>, / D1, 15 16 0 0 1+ , P *0+ , D 1 1 1 0 0. C. El Observador No Lineal A excepción de la concentración de glucosa, no es posible medir directamente los valores de las restantes variables, por lo que es necesario desarrollar un conjunto de observadores no lineales para poder estimar el conjunto de variables. Basados en la teoría de observadores no lineales [18], es posible escribir la matriz de observabilidad % 6 % 7 :. Q%R SS% 5 2 38 467 %9 Si esta matriz existe, tiene inversa, 637 % y 638 7 % son uniformente lypschinianas, y el control uniformente acotado es posible realizar un cambio de coordenadas que transforman al sistema (7) en # T $%R &% U8 %RVT <( )%? , / % 17 Que aplicado al MMB, queda como 0 W W XW Y * + , - , 0 - W Z 1 Z U8[ %R\T </ %? , (18) Además se puede establecer una ley de control no lineal u definida alrededor de x0 1;1 <=1 >?, 1 0 0 Y como r = 3, n = 3; la matriz de controlabilidad es % S 6 ] S% , 7 %U# 67 % SS% , -, La matriz inversa de Q%R resulta ser: ] U8[ # 1 5 _ ^ 4 ` 0 1 ` 0 0: a, ` 9 ` A1 C < X2 2 2 Y 2 2 ? 4 ` A1 C 2 2 2 ` 8 Glucose Glucose Observer Disturbance 7 El vector VT de la expresión (17) es un vector con tres constantes que deben ser encontradas a fin de que la salida observada coincida con la salida real que debe ser sintonizado de acuerdo al modelo y al proceso real. 6 mmol/Litro 5 4 3 2 III. RESULTADOS 1 0 Siguiendo a Lam et.al, [19] la perturbación utilizada para medir la respuesta del controlador tiene una expresión del tipo: (19) 100 150 200 250 Tiempo (min) 300 350 400 0 Glucose Observer -0.002 mmol/Litro -0.004 -0.006 -0.008 -0.01 -0.012 0 50 100 150 200 250 Tiempo (min) 300 350 400 Fig. 3: Simulación de la diferencia entre la respuesta fisiológica a una inyección de glucosa real y observada. -4 4 x 10 2 0 -2 mU/Litro Esta perturbación de la expresión tiene un valor pico de 1mmol/litro se muestra en la Fig. 2. En trabajos anteriores [6] y [7] pueden verse gráficas de simulaciones realizadas con las mismas técnicas aquí desarrolladas pero basadas en el MMB desarrollado en [11]. La respuesta del controlador puede hacerse tan agresiva como se pretenda pero el objetivo es simular el comportamiento de un páncreas normal lo cual determina la elección de los parámetros del control lineal y del observador. La respuesta del sistema se encuentra dentro de valores aceptables ya que logramos una reducción de los niveles de glucosa en un intervalo de tiempo menor a 100 minutos, sin embargo no llevamos a la glucosa al valor basal elegido (4,5 mmoles/litro) ya que como todas la variables fisiológicas, es un valor relativo y variable para cada sujeto en particular. Además, dado que el error de los sensores de glucosa es de un10 a 15%; este valor nos asegura evitar los riesgos de la hipoglucemia debido a una lectura errónea del sensor. Por otra parte, es muy simple cambiar los parámetros del control y modificar la respuesta del sistema. La respuesta de la glucosa se muestra en la Fig. 2, junto con la perturbación debida a la ingesta. Obsérvese que la no linealidad del proceso hace que la concentración de glucosa en sangre se eleve muy por encima del valor de la perturbación, aún con la acción del controlador. El error absoluto o diferencia entre las concentraciones de glucosa real y la estimada por el observador se muestra en la Fig. 3. El error máximo lo tenemos entre el instante inicial y hasta los 50 minutos aproximadamente que es donde se produce la variación más rápida de los valores de concentración de glucosa. El error absoluto o diferencia entre la insulina y la insulina estimada por el observador se muestra en la Fig. 4. El valor máximo de la diferencia entre las concentraciones de insulina real y de insulina estimada por el observador tiene un valor máximo de 10 x10 -4. El error o diferencia entre los valores medidos y observados de la variable X se muestran en la Fig. 5. La diferencia máxima entre ambos valores es de 6 x10 -8. Recordemos que la variable X es la que no puede medirse directamente y la razón por la cual se implementó el uso de los controladores no lineales. 50 Fig. 2: Simulación de un bolo de glucosa y la respuesta de la concentración de glucosa sobre el valor basal. -4 -6 -8 -10 -12 0 50 100 150 200 Time (min) 250 300 350 400 Fig. 4: Simulación de la diferencia entre la concentración de insulina real y la estimada por el observador. -8 8 x 10 Remote Compartment Observer 6 4 mU/Litro b c%dX ;e= Y. 0 2 0 -2 -4 -6 0 50 100 150 200 Time (min) 250 300 350 400 Fig. 5: Simulación de la diferencia entre los valores reales y los estimados por el observador de la variable X. 5 IV. CONCLUSIONES Este trabajo presenta algunos resultados sobre la utilización de métodos de control no lineal en el problema de la regulación de la glucosa en pacientes con DMT1 con infusión de insulina IV y monitoreo continuo IV. Este tipo de control con realimentación no lineal exige el conocimiento de todos los estados, pero los valores de X(t) no son medibles, por lo que se impone la utilización de un observador para obtenerlos. Los resultados obtenidos presentan una mejora respecto de métodos de control basados en la linealización del modelo. Se destaca especialmente la ausencia de sobrepaso negativo al llevar a la glucosa nuevamente al valor basal luego de la perturbación. Con respecto a la regulación en el entorno de valores basales, especialmente durante el ayuno nocturno puede hacerse menos agresiva la acción del controlador imponiendo un escalón o valor mínimo por debajo del cual la salida del controlador sea nula. El desarrollo de este tipo de dispositivos puede ayudar en tratamientos intensivos con insulina a pacientes con DMT1 o con DMT2 y brinda una oportunidad muy interesante para que estas personas no desarrollen las consecuencias de esta grave enfermedad. REFERENCIAS [1] [2] [3] [4] [5] [6] [7] [8] Página WEB de National Diabetes Clearinghouse http://diabetes.niddk.nih.gov/dm/pubs/control/ Ultimo acceso 06/09/2010. Conget, I; Giménez, M; “Insulinización temprana,¿a favor o en contra?”; Avances en Diabetología; 2008; 24(6): 507-508. Van den Berghe, et.al. “Terapia intensiva con insulina en las unidades de cuidados intensivos. Estrategias terapéuticas en pacientes graves.” The New England Journal of Medicine. http://www.intramed.net/contenidover.asp?contenidoID=39377 Ultimo acceso 06/09/2010. Clemens, A.H., P.H. Chang and R.W. Myers, “The development of Biostator, a glucose controlled insulin infusion system (GCIIS)”. Horm Metab Res S7,1977, 23-33. Northrop , R.; "Endogenous and Exogenous Regulation and Control of Phisiological Systems." Chapman & Hall/CRC. 1999. Cocha, G., Costanza, V., D’Attellis, C., “Control No Lineal de la Diabetes Mellitus”. Anales de la RPIC 2009. Cocha, G.R. D’Attellis C. E. (2009), “Observadores No Lineales en el Control de la Diabetes Mellitus”. Anales 1º Congreso de BioIngeniería, Costa Rica 2009. Vol 1, 325-331. Cobelli, C, Dalla Man, C, Sparacino, G, Magni, L, De Nicolao, G, Kovatchev, P, “Diabetes:Model, signals and Control” IEEE REVIEWS IN BIOMEDICAL ENGINEERING, VOL. 2, 2009, pp 54-96. [9] [10] [11] [12] [13] [14] Sorensen, J T (1985) “A Phisiologic Model of Glucose Methabolism In Man And Its Use to Design and Assess improved insulin Therapies for Diabetes”. (Tesis Doctoral, Massachustetts Institute of Technology, Massachusetts). Bergman, R.N. Phillips, L.S. Cobelli,C. “Physiologic evaluation of factors controlling glucose tolerance in man. Measurement of insulin sensitivity and _ -cell glucose sensitivity from the response to intravenous glucose,” En:Journal of Clinical Investigation, 1981,Vol. 68, 1456–1467. H.C: Morris, B.O´Reilly, D Streja "A New Bifasic Minimal Model", Proceedings of the 26th Annual International Conference of the IEEE EMBS, San Francisco USA, Septiembre 1-5, 2004. Merchante Alfaro, A, “Seminarios de Diabetes, Modelo Mínimo”; Avances en Diabetología; 2008; 24(4); 312-319. Bergman, R; “Minimal Model: Perspectives from 2005.” Hormone Research, Horm Res 2005;64(suppl 3):8–15, January, 2006. Lynch, S.; Bequette, W; "Model Predictive Control of Blood Glucose in Type I Diabetics Using Subcutaneous Glucose Measurements." Proceedings of American Control Conference. Anchorage AK May 8-10, 2002.D [15] A. M.S. Ibbini, M. A. Masadeh. “A fuzzy logic based closed-loop control system for blood glucose level regulation in diabetes.” Journal of Medical Engineering& Technology, Vol 29, N° 2, March April. [16] F. Chee and T. Fernando, “Closed-loop control of blood glucose,” Springer-Verlag, Berlin Heidelberg, 2007. [17] E. H.C: Morris, B.O´Reilly, D Streja "A New Bifasic Minimal Model", Proceedings of the 26th Annual International Conference of the IEEE EMBS, San Francisco USA, Septiembre 1-5, 2004. [18] Carlos E. D´Attellis " Introducción a los sistemas no lineales de control y sus aplicaciones." AADECA. 1992. [19] Lam, Z. H, Hwuang, K.S. , Geofrey C., Wake, G, "Active Insuline infusión using Optimaland Derivative Weighted Control". Medical Engineering & Physics, Volumen 24, Cap. 10, Pp 663-672, Diciembre 2002.