Clase06-01
Anuncio

Universidad Nacional de Ingenierı́a - Facultad de Ingenierı́a Mecánica
Departamento Académico de Ingenierı́a Aplicada
CONTROL MODERNO Y ÓPTIMO (MT 227C)
Clase06-01
Elizabeth Villota Cerna
06/10/2010
Semestre 2010II - UNI
En esta parte mostramos como usar control por realimentación de estados para modificar la dinámica del
sistema a través de observadores. Introducimos el concepto de observabilidad y mostramos que si un sistema
es observable es posible recuperar los estados en base a las medidas de las entradas y salidas del sistema.
Luego mostramos como diseñar un controlador con realimentación partiendo de los estados observados. Un
concepto importante es el principio de separación, que será probado. La estructura del controlador que se
deriva es bastante general y se puede obtener en otros métodos de diseño.
6.1.
Observabilidad
Como hemos observado en las secciones anteriores, la controlabilidad del sistema implica la habilidad
para controlar completamente el vector de estado. Supongamos ahora que no podemos acceder a los estados
del sistema o que conocer todos los estados del sistema requerirı́a un número excesivo de sensores, lo que es
más realista. En esta parte investigamos como podemos estimar los estados usando un modelo matemático y
algunas medidas. Mostraremos que el cálculo de los estados será realizado por un sistema dinámico llamado
observador.
Consideremos el sistema descrito por la ecuación diferencial lineal:
ẋ(t) = Ax(t) + Bu(t), x(0) = xo
,
y(t) = Cx(t) + Du(t),
donde C ∈ Rp×n , p ≤ n, y D ∈ Rp×m . Nuestra intención es conocer el comportamiento dinámico de todos los
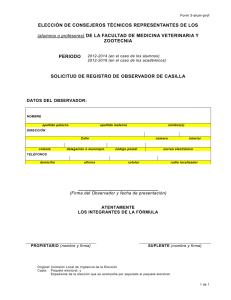
estados a partir de sus entradas y salidas (señal medida), ver Fig. 1. La señal medida puede estar contaminada
con ruido n, sin embargo comenzaremos analizando el caso sin ruido. Escribimos x̂ para el estado estimado
que resultado del observador.
n
Process
u
ẋ = Ax + Bu
y
x̂
6
y = C x + Du
Observer
Figura 1: Diagrama de bloques del observador. El observador usa las medidas del proceso y (posiblemente
contaminada con ruido n) y las entradas u para estimar el estado actual del proceso.
Observabilidad Un sistema lineal es observable si existe un tiempo finito tf > to tal que para cualquier
u(t) y resultante y(t) en el tiempo [to , tf ] podemos determinar x(t), to < t < tf , conociendo completamente
la entrada u y la salida y.
⋄
Nótese que podemos decir que nuestro objetivo es determinar x(to ) ya que una vez x(to ) es obtenido, x(t)
se puede determinar conociendo u(t) y y(t) en el intervalo de tiempo [to , tf ]. A continuación mostraremos
como podemos determinar constructivamente x(to ), dados u(t) y y(t). Primero notamos que la solución y(t)
está dada por:
Z
t
CeA(t−τ ) Bu(τ )dτ + Du(t).
y(t) = CeA(t−to ) x(to ) +
to
Definiendo:
g(t) = CeA(t−to ) x(to ) = y(t) −
Z
t
to
CeA(t−τ ) Bu(τ )dτ − Du(t),
CONTROL POR REALIMENTACIÓN DE SALIDAS/OBSERVADOR DE ORDEN COMPLETO
donde la parte derecha de la igualdad es conocida. Nuestro objetivo es determinar x(to ). Teniendo x(to ),
podemos determinar enteramente x(t) para todo t ∈ [tf , to ] de la fórmula:
A(t−to )
x(t) = e
x(to ) +
t
Z
eA(t−τ ) Bu(τ )dτ.
to
T
Premultiplicando ambos lados de g(t) por eA (t−to ) C T e integrando la expresión resultante entre los limites
to y tf , obtenemos:
Z t
Z t
T
T
eA (t−to ) C T g(t)dt.
eA (t−to ) C T CeA(t−to ) dtxo =
to
to
Sea
Vo (to , tf ) =
tf
Z
T
eA t C T CeAt dt.
to
Entonces, despues de algunas manipulaciones y asumiendo que la matriz Vo (to , tf ) es invertible, obtenemos:
Ato
xo = e
Z
T
Vo−1 (to , tf )eA to
tf
eA
T
(t−to )
C T g(t)dt.
to
El conocimiento de xo nos permitirá reconstruir totalmente el estado x(t) sobre todo el intervalo [to , tf ].
Concluimos que si la matriz Vo (to , tf ) es invertible, entonces el sistema es observable.
6.1.1.
Ejemplo
Para un sistema dinámico modelado por:
−1
−1/2 1/2
u
x+
ẋ =
1
−1/2 1/2
y = 1 1 x
= Ax + bu,
= cx,
determinaremos x(t) sobre el intervalo [0, 10] sabiendo que u(t) = 1 para t ≥ 0 y y(t) = t2 + 2t para t ≥ 0.
Primero calcularemos x(0). Tenemos que to = 0 y tf = 10. Entonces:
x(to ) = x(0) = eAto Vo−1 (to , tf )eA
T
to
Z
tf
eA
T
(t−to ) T
c g(t)dt
to
= Vo−1 (0, 10)
Z
g(t) = y(t) − c
Z
donde:
10
T
eA t cT g(t)dt,
0
10
eA(t−τ ) bu(τ )dτ.
0
Para evaluar la expresión arriba, primero calcularemos eAt :
At
−1
−1
−1
e = L ([sI2 − A] ) = L
=
− 21 s12
− 21 s12
1
2t
.
1 + 21 t
1 − 12 t
− 21 t
Calculando:
Vo (0, 10) =
Z
1
s
10
1 1
2 s2
1
1 1
s + 2 s2
T
eA t cT ceAt dt,
0
=
Z
0
10
=
"
1−t
1+t
t − t2 +
3
t − t3
1−t
t3
3
1+t
3
t − t3
t + t2 +
t3
3
dt =
Z
0
10
1 − 2t + t2
1 − t2
#10 243,333
=
−323,333
0
Clase06-01, pág. 2
1 − t2
1 + 2t + t2
−323,333
443,333
.
dt
CONTROL POR REALIMENTACIÓN DE SALIDAS/OBSERVADOR DE ORDEN COMPLETO
La inversa de Vo (0, 10) es:
Vo−1 (0, 10) =
0,133
0,097
0,097
0,073
.
Calculando g(t) obtenemos:
g(t) = y(t) − c
t
Z
eA(t−τ ) bu(τ )dτ
0
= t2 + 2t −
Entonces:
Z
10
AT t T
e
Z t
−1 + t − τ
(2t − 2τ )dτ
dτ = t2 + 2t −
1+t+τ
0
0
t
t
t2 + 2t − 2t(τ )0 + τ 2 0 = t2 + 2t − t2 = 2t.
1
c g(t)dt =
1
Z
10
0
0
Z t
(1 − t)2t
(1 + t)2t
dt =
10 = −566,667 .
766,667
0
t2 − 23 t3
t2 + 32 t3
Luego calculando la condición inicial xo :
x(0) =
Vo−1 (0, 10)
Z
t
AT t t
e
c g(t)dt =
0
−1
1
.
Conociendo x(0), podemos encontrar x(t) para t ≥ 0,
x(0) = eAt x(0) +
Z
t
eA(t−τ ) bu(τ )dτ.
0
=
6.1.2.
−1 + t
1+t
+
"
2
(−1 + t)t − t2
2
(1 + t)t − t2
#
=
"
t2
2
t2
2
−1
+ 2t + 1
#
Teorema
Las siguientes condiciones son equivalentes:
1. El sistema ẋ = Ax + Bu, y = Cx + Du es observable.
2. La matriz Vo (to , tf ) es no singular para todo tf > to .
3. Las n columnas de CeAt son linealmente independientes para todo t ∈ [0, ∞) sobre los números reales.
4. La matriz de observabilidad Wo :
Wo =
es de rango completo (n).
sIn − A
5. rango
= n, para todo s = λ(A).
C
C
CA
..
.
CAn−1
∈ Rpn×n
⋄
Al igual que en el caso de controlabilidad, usando una transformación de similaridad podemos separar
la parte observable de la no observable. Si los autovalores de la parte no observable son asintóticamente
estables, entonces decimos que el sistema es detectable.
Clase06-01, pág. 3
CONTROL POR REALIMENTACIÓN DE SALIDAS/OBSERVADOR DE ORDEN COMPLETO
6.2.
Estimación de estados
Una vez definido el concepto de observabilidad, volveremos a responder la pregunta de como construir un
observador para un sistema. Buscamos observadores que sean representados como sistemas lineales y tomen
las entradas y salidas del sistema para producir un estimado de los estados del sistema. Esto es, deseamos
contruir un sistema dinámico de la forma:
dx̂
= F x̂ + Gu + Hy,
dt
donde u y y son la entrada y salida del sistema original y x̂ ∈ Rn es un estimado del estado con la propiedad
que x̂(t) → x(t) a medida que t → ∞.
6.2.1.
Observador de Orden Completo
Considerando el sistema lineal con D = 0 para simplificar la exposición:
ẋ(t) = Ax(t) + Bu(t), x(0) = xo
,
y(t) = Cx(t),
donde C ∈ Rp×n , p ≤ n. Asumiendo que el sistema es observable. Nuestro objetivo es determinar un sistema
dinámico que estime el vector de estados x basado en las entradas u y salidas y.
A continuación intentamos determinar los estados simplemente simulando las ecuaciones del sistema con
las entradas u, estimador en lazo abierto:
dx̂
= Ax̂ + Bu.
dt
Para encontrar las propiedades del sistema, introducimos el error de estimación:
x̃ = x − x̂.
Entonces, la dinámica del error de estimación está descrito por:
x̃˙ = ẋ − x̂˙ = Ax̃,
con el error inicial de estimación siendo:
x̃(0) = x(0) − x̂(0).
Si los autovalores de la matriz A estan en el semiplano complejo izquierdo abierto, entonces el error converge
a cero. Sin embargo, no tenemos ningun control sobre la variación de la convergencia o sobre el valor adonde
convergen los estados reales y estimados (independientemente, los estados x y x̃ también convergen a cero).
Por otro lado, la matriz A no necesariamente tendrá sus autovalores en el semiplano complejo izquierdo
abierto. Luego este estimador en lazo abierto no es práctico ya que queremos que nuestra estimación converja
rápidamente a un estado diferente de cero para asi poder usarlo en nuestro controlador, y esto independiente
de las caracterı́sticas del sistema. Ahora analicemos el caso incluyendo la salida y. Este último caso se
denomina estimador en lazo cerrado, el observador Luenberger o el estimador de orden completo asintótico.
La dinámica del estimador en lazo cerrado esta descrita por:
dx̂
= Ax̂ + Bu + L(y − C x̂),
dt
la realimentación de la señal medida es proveida por el término L(y − C x̂), que es proporcional a la diferencia
entre la salida observada y la salida estimada por el observador.
La dinámica del error de estimación viene siendo gobernada por:
x̃˙ = ẋ − x̂˙
.
= (A − LC)x̃, x̃(0) = x(0) − x̂(0).
La matriz L puede ser elegida del tal forma que A − LC tenga sus autovalores con partes reales negativas, y
como consecuencia, el error x̃ tienda a cero. La variación de la convergencia es determinada por una selección
Clase06-01, pág. 4
CONTROL POR REALIMENTACIÓN DE SALIDAS/OBSERVADOR DE ORDEN COMPLETO
apropiada de autovalores. Es importante destacar que las propiedades de convergencia pueden ser diseñadas
para ser más rápidas con relación a la dinámica del sistema. Adicionalmente, esta versión de observador
trabaja aún en el caso de sistemas inestables.
Nótese la similaridad entre los problemas de encontrar un realimentador de estados y encontrar un
observador. Realimentación de estados por ubicación de polos es equivalente a encontrar una matriz K tal
que A − BK tenga ciertos autovalores. Diseñar un observador con autovalores prescritos es equivalente a
encontrar una matriz L tal que A − LC tenga ciertos autovalores. Dado que los autovalores de una matriz
y su transpuesta son los mismos podemos establecer las siguientes equivalencias:
A ⇐⇒ AT ,
B ⇐⇒ C T ,
K ⇐⇒ LT ,
Wc ⇐⇒ WoT .
El problema de diseño del observador es el dual del problema de diseño del realimentador de estados. Luego
podemos valernos de las herramientas aprendidas en la teorı́a de realimentación de estados. Ilustraremos
este último punto con un ejemplo.
Ejemplo
Dadas las matrices del siguiente sistema observable:
0 0
1
0
1 0
2
0
, C = 1
A=
0 1
0
3
0
0 0 −21 5
0 0
0 0
0
1
,
construir la matriz L ∈ R4×2 tal que los autovalores de A − LC estan localizados en:
{−2, −3 + i, −3 − i, −4}.
En nuestra construcción de la matriz de ganancias L usamos la forma canónica observable del sistema
mostrada en Clase04-01. Nuestro objetivo es entonces contruir la matriz L tal que el polinomio caracterı́stico
de la matriz A − LC es:
det(sI4 − A + LC) = s4 + 12s3 + 54s2 + 108s + 80.
Usando la forma canónica observable del sistema,
0
1
 − L̂Ĉ =
0
0
Luego tenemos que:
finalmente:
seleccionamos L̂ tal que:
0 0 −80
0 0 −180
.
1 0 −54
0 1 −12
1681
2270
L̂ =
1137
251
80
108
,
54
17
1137
3955
L = T̂ T L̂ =
5681
−23626
54
188
.
270
−1117
Clase06-01, pág. 5
CONTROL POR REALIMENTACIÓN DE SALIDAS/OBSERVADOR DE ORDEN COMPLETO
7.
Control usando Estados Estimados
En esta sección consideraremos la planta representado por el sistema espacio de estados de la forma:
d
x(t) = Ax(t) + Bu(t), x(0) = xo
.
dt
y(t) = Cx(t),
(1)
Nótese que hemos asumido que no hay término directo en el sistema (D = 0). A menudo esta es una
suposición realista.
En esta parte nuestra intención es diseñar un controlador por realimentación de estados para el caso
donde solo la salida es medida. Además asumimos que el sistema es controlable y observable. En la Clase0503 encontramos una realimentación de la forma:
u = −Kx + kr r,
para el caso en que todos los estados eran medidos, y en la sección anterior desarrollamos un observador que
genera estimados del estado x̂ basado en entradas y salidas. En esta parte combinaremos ambas ideas para
encontrar una realimentación que dote de autovalores deseados al sistema en lazo cerrado para el caso de
sistemas donde solo salidas son disponibles para realimentación.
Si todos los estados no se pueden medir, parece razonable intentar la siguiente realimentación:
u = −K x̂ + kr r,
(2)
donde x̂ es la salida del observador de estados, en otras palabras:
dx̂
= Ax̂ + Bu + L(y − C x̂).
dt
(3)
Dado que el sistema (1) y el observador (3) son ambos de dimensión n, el sistema en lazo cerrado es de
dimensión 2n con los estados (x, x̂). La evolución de los estados esta descrita por (1)-(3). Para analizar el
sistema en lazo cerrado la variable de estado x̂ es reemplazada por:
x̃ = x − x̂.
(4)
Sustrayendo (3) de (1) resulta:
x̃˙ = ẋ − x̂˙
.
= Ax − Ax̂ − L(Cx − C x̂) = Ax̃ − LC x̃ = (A − LC)x̃.
Retornando a la dinámica del sistema, introduciendo u de (2) en (1) y usando (4) para eliminar x̂ resulta:
dx
dt
= Ax + Bu = Ax − BK x̂ + Bkr r = Ax − BK(x − x̃) + BKr r
(5)
= (A − BK)x + BK x̃ + Bkr r.
El sistema en lazo cerrado es entonces gobernado por:
d x
A − BK
BK
x
Bkr
=
r,
+
0 A− LC
0
x̃
dt x̃
x
y = C 0
.
x̃
(6)
Nótese que el estado x̃, que representa el error del observador, no se ve afectado por la señal de referencia r.
Esto es deseable dado que no queremos que la señal de referencia genere errores en el observador.
Con la dinámica del sistema siendo diagonal por bloques, encontramos que el polinomio caracterı́stico
del sistema en lazo cerrado es:
αc (s) = det(sI − A + BK) det(sI − A + LC),
lo que significa que el diseño de la ley de control es separado de la construcción del estimador. Esto es lo que
conocemos como el principio de separación. El resultado es resumido a continuación.
Clase06-01, pág. 6
CONTROL POR REALIMENTACIÓN DE SALIDAS/OBSERVADOR DE ORDEN COMPLETO
r
u
kr
B
6
ẋ
6
R
x
y
C
A
Process
−K
e
L
B
6
x̂˙
6
− ŷ
R
x̂
−C
A
Observer
Controller
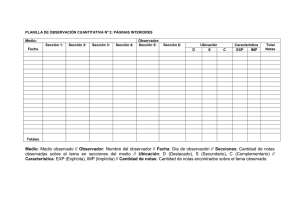
Figura 2: Diagrama de bloques sistema de control basado en un observador. El observador usa las medidas
del proceso y y las entradas u para estimar el estado actual del proceso. El estimado es usado por el
controlador por realimentación de estados para generar la entrada correctiva. El controlador está formado
por el observador y la realimentación de estados.
Teorema: (Ubicación de polos por realimentación de salidas). Considere el sistema:
d
x(t) = Ax(t) + Bu(t), x(0) = xo
dt
y(t) = Cx(t).
El controlador descrito por:
dx̂
dt
u
= Ax̂ + Bu + L(y − C x̂) = (A − BK − LC)x̂ + Ly,
= −K x̂ + kr r,
da un sistema en lazo cerrado con el polinomio caracterı́stico:
αc (s) = det(sI − A + BK) det(sI − A + LC).
Este polinomio puede tener sus raı́ces arbitrariamente asignadas si el sistema es controlable y observable. ⋄
El controlador tiene un atractivo especial: puede ser considerado como compuesto por dos partes, one
la realimentación de estados y la otra el observador. La ganancia de realimentación K puede ser calculada
como si todos los estados pudiesen ser medidos, y solo depende de A y B. La ganancia del observador L
depende solo de A y C. La propiedad de que la ubicación de autovalores para sistemas con realimentación
de salidas puede ser separada en la ubicación de autovalores una realimentación de estados y un observador
es llamada principio de separación.
Un diagrama de bloques del controlador es mostrado en la Fig. 2. Nótese que el controlador contiene un
modelo dinámico de la planta. Esto se conoce como principio del modelo interno; el controlador posee un
modelo de la planta que debe ser controlada.
La función de transferencia del sistema en lazo cerrado relacionando Y (s) y R(s), para condiciones
iniciales cero, es:
−1 sI − A + BK
B
−BK
kr R(s)
Y (s) = C 0
0
0
sI − A + LC
= C(s − A + BK)−1 Bkr R(s).
La expresión arriba es idéntica a la del sistema en lazo cerrado si aplicaramos la ley de control por realimentación de estados u = −Kx + Kr r. Entonces, el compensador combinado estimador-observador genera
la misma función de transferencia en lazo cerrado que la ley de control por realimentación de estados.
Clase06-01, pág. 7
CONTROL POR REALIMENTACIÓN DE SALIDAS/OBSERVADOR DE ORDEN COMPLETO
7.1.
Selección de polos del estimador
Algunos autores recomiendan que la parte real de los polos del estimador -esto es, la parte real de los
autovalores de la matriz A − LC - estén de 2 a 6 veces más hacia la izquierda en el semiplano complejo
izquierdo que la parte real de los polos del controlador, que son los autovalores de la matriz A − BK. Tal
elección asegura un decaimiento rápido del error de estimación x̃ = x− x̂ comparado con la dinámica deseada
del controlador. Esto, a su vez, hace que los polos del controlador dominen la respuesta del sistema en lazo
cerrado. Dado que los polos del estimador representan una medida de la rapidez con la que el error x̃ = x − x̂
decae a cero, uno debe tender a asignar los polos del estimador bien hacia adentro del semiplano complejo
izquierdo. Sin embargo, decaimiento rápido requiere de largas ganancias que pueden llevar a la saturación
de algunas señales y efectos no lineales impredecibles. Si los polos del estimador fuesen más lentos que los
polos del controlador, la respuesta del sistema en lazo cerrado estarı́a dominada por el estimador, lo cual es
indeseable. Como es usual en la practica de ingenierı́a, el término compromiso puede ser usado para describir
el proceso de construcción de la estructura final del compensador.
7.2.
7.2.1.
Ejemplo: Motor DC
Modelo del sistema
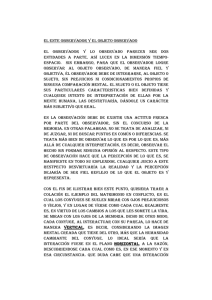
Considere el sistema motor DC de armadura que presenta la esquemática de la Fig. 3, donde Ra = 5Ω,
La = 200mH, Kb = 0,1V/rad/sec, Ki = 0,1Nm/A, la razón del engranaje N1 /N2 = 1/50. La inercia de la
armadura es Iarmadura = 2 × 10−3 kgm2 . La carga de 10 kg está localizada a un radio efectivo de 0.2 m. La
inercia del engranaje y fricción son despreciables.
Primero construimos un modelo espacio de estados del motor DC. Empezamos escribiendo la ecuación
que relaciona el torque a la aceleración angular:
τm = Ieq θ̈,
donde:
Ieq
(7)
= Iarmadura + (N1 /N2 )2 Icarga
= 2 × 10−3 kgm2 + (1/50)2 × 10 × (0,2)2 kgm2
= 2,16 × 10−3 kgm2 .
Aplicando la ley del voltaje de Kirchoff al circuito de la armadura resulta:
Ra ia + La
dia
+ eb = ea ,
dt
donde eb = Kb dθ
dt . La ecuación para el torque desarrollado es:
τm = Ki ia .
(8)
El torque del motor es igual al torque entregado a la carga (caso ideal, en la práctica no hay 100 % de
eficiencia). Entonces, combinando (7) y (8) resulta:
θ̈ =
ia
⫹
ea
⫺
Ra
Ki
ia
Ieq
La
⫹
eb
⫺
if ⫽ constant
Gear
l
Il
Output
Potentiometer
Figure 3.8
Figura 3: Modelo de un motor DC de armadura.
Clase06-01, pág. 8
CONTROL POR REALIMENTACIÓN DE SALIDAS/OBSERVADOR DE ORDEN COMPLETO
Sea x1 = ia , x2 = θ, x3 = θ̇ = ω, u = ea , y y = θl . Luego tomando en cuenta la definición de las variables
de estado, representamos la ecuaciones del modelo en la forma de espacio de estados:
1
Ra
b
− La 0 − K
x1
ẋ1
La
La
ẋ2 = 0
0
1 x2 + 0 u
Ki
x
ẋ3
0
0
0
Ieq
3
h
i x1
N1
x2 .
0
y = 0 N
2
x3
Sustituyendo los parámetros del sistema dados, obtenemos de la ecuación mostrada arriba:
−25
0 −0,5
5
ẋ1
x1
ẋ2 =
0
0
1 x2 + 0 u = Ax + bu
ẋ3
46,296 0 0
0
x3
x
1
y = 0 0,02 0 x2 = cx.
x3
7.2.2.
Análisis del sistema
Polos en lazo abierto
Los autovalores de la dinámica del sistema en lazo abierto están dados por:
{0, −24,0307, −0,9630}
Controlabilidad
La matriz de controlabilidad es:
Wc =
b Ab A2 b
5
= 0
0
−125 3009,3
0
231,5 .
231,5 −5787
El determinante de la matriz es det(Wc ) 6= 0, y concluimos que el sistema es controlable.
Observabilidad
La matriz de observabilidad, usando el sistema dual ẇ = AT w + cT n es:
0
0
0,9259
.
0
0
WoT = cT AT cT (AT )2 C T = 0,02
0
0,02
0
El determinante de la matriz es det(WoT ) 6= 0, y concluimos que el sistema es observable.
7.2.3.
Diseño del control por realimentación de estados
Polos deseados
Nuestro siguiente paso es diseñar el controlador por realimentación de estados u = −Kx + Kr r, tal que
los autovalores de A − bK son:
{−1 + i, −1 − i, −10}.
El polinomio caracterı́stico del sistema en lazo cerrado es:
αc (s) = (s + 1 − i)(s + 1 + i)(s + 10) = s3 + 12s2 + 22s + 20.
Clase06-01, pág. 9
CONTROL POR REALIMENTACIÓN DE SALIDAS/OBSERVADOR DE ORDEN COMPLETO
Ganancia de realimentación K
Para ubicar los polos en las posiciones deseadas, primero transformamos el sistema en la forma canónica
controlable.
La última fila de la matriz de controlabilidad es:
q1 = 0 0,0043
0
,
y entonces la matriz de transformación que buscamos tiene la forma:
0 0,0043
0
q1
0
0,0043 .
T = q1 A = 0
2
q1 A
0,2
0
0
El sistema de matrices en las nuevas coordenadas es:
0
à = T AT −1 = 0
0
0
1 ,
−25
1
0
−23,15
0
b̃ = T b = 0 ,
1
y,
c̃ = cT −1 =
Ahora encontramos K tal que:
0
à − b̃c̃ = 0
−20
Luego tenemos:
K̃ =
y,
K = K̃T =
Entonces:
20
4,63
0
−2,60
−12
0
A − bK =
46,294
.
0
1 .
−12
1
0
−22
−1,148
0
−13
0,0864
−0,432
0
0
,
−0,005
.
−0,4752
.
1
0
O, usando la fórmula de Ackerman (sólo funciona para sistemas una entrada - una salida):
K = q1 αc (A).
K=
−2,5879
0,0860
−0,0049
..
La función de transferencia del sistema en lazo cerrado es:
Y (s)
4,6296kr
L(y(t))
=
= c(sI − A + bK)−1 bKr = 3
.
L(r(t))
R(s)
s + 12s2 + 22s + 20
La respuesta del sistema en lazo cerrado al escalón de magnitud igual a 1/kr es presentado en la Fig. 4.
7.2.4.
Diseño del estimador de estados
Polos deseados
Nuestro siguiente paso es diseñar el estimador de orden completo ubicando los polos del estimador en:
{−4, −5 + 2i, −5 − 2i}.
El polinomio caracterı́stico del estimador es:
det(sI3 − A + Lc) = (s + 4)(s + 5 − 2i)(s + 5 + 2i) = s3 + 14s2 + 69s + 116.
Clase06-01, pág. 10
CONTROL POR REALIMENTACIÓN DE SALIDAS/OBSERVADOR DE ORDEN COMPLETO
0.25
0.2
y(t)
0.15
0.1
0.05
0
0
2
4
6
8
10
Time (sec)
Figura 4: Respuesta del sistema en lazo cerrado del motor para un escalón de magnitud 1/kr .
Ganancia de estimador L
Para ubicar los polos en las posiciones deseadas, primero transformamos el sistema a la forma canónica
observable. O, equivalentemente al sistema dual ẇ = AT w + cT n a su forma canónica controlable.
La última fila de la inversa de WoT , q̂1 es:
q̂1 =
1,0800
0 0
La matriz de transformación que lleva al sistema a su forma
q̂1
1,1
T̂ = q̂1 AT = −27
650
q̂1 (AT )2
.
canónica controlable es:
0
0
0
50 .
50 −1250
Las matrices  y ĉ en las nuevas coordenadas son:
0
0
1
0
0
1 y ĉT = cT T̂ −1 = 0 .
ÂT = T̂ AT T̂ −1 = 0
1
0 −23,1481 −25
Ahora encontramos L̂T tal que:
0
ÂT − ĉT L̂T = 0
−116
1
0
−69
0
1 .
−14
Luego tenemos:
L̂T =
y como consecuencia:
116
LT = L̂T T̂ =
o,
45,8519
−8263
−11
−550
,
16042
−8263
L = −550 .
16042
La dinámica del estimador de estados de orden completo es descrita por:
x̂˙ = (A − Lc)x̂ + bu + Ly,
Clase06-01, pág. 11
CONTROL POR REALIMENTACIÓN DE SALIDAS/OBSERVADOR DE ORDEN COMPLETO
esto es:
−25
0
x̂˙ =
46,2963
165,2544
11
−320,8519
−8263
5
−0,5
1 x̂ + 0 u + −550 y.
16042
0
0
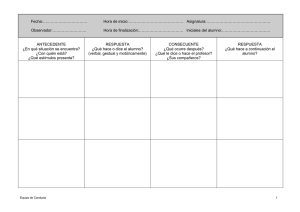
Conectamos el estimador de orden completo del motor DC, junto con la realimentación de estados,
entonces obtenemos el sistema en lazo cerrado con el compensador controlador-estimador-orden-completo
combinado. La Fig. 5 muestra la gráfica de x1 y su estimado para el sistema en lazo cerrado con estimador
T
en el lazo, donde r = 0, x(0) = 1 2 −0,1
, y x̂(0) = 0.
El diseño del estimador de orden reducido sera presentado junto con la teorı́a de estimadores de orden
reducido.
3
x1
x1 estimate
2
1
0
⫺1
⫺2
⫺3
⫺4
⫺5
⫺6
⫺7
0
0.5
1
1.5
Time (sec)
2
2.5
3
Figure 3.10
Figura 5: Gráfica de x1 y su estimado versus el tiempo para el sistema en lazo cerrado con un estimador de
orden completo en el lazo.
Fuente: Capı́tulo 3 del libro Systems and Control de Stanislaw H. Zak (2002).
Fuente: Capı́tulo 7 del libro Feedback Systems: An Introduction for Scientists and Engineers, de Karl J.
Åström y Richard M. Murray.
Clase06-01, pág. 12