PDF Full-Text
Anuncio

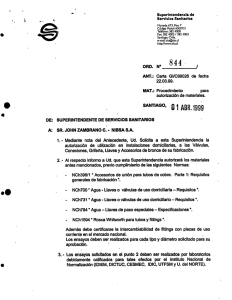
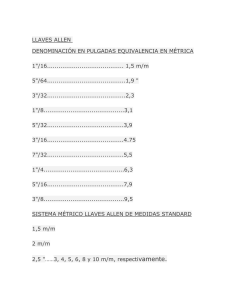
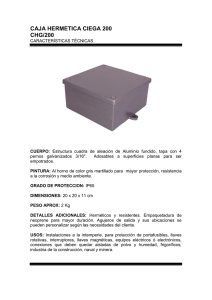
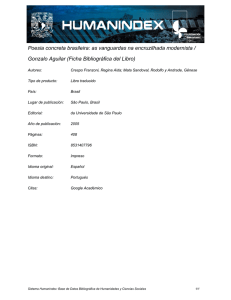
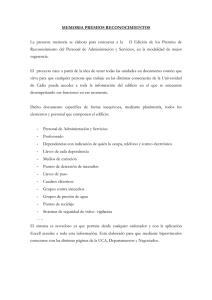
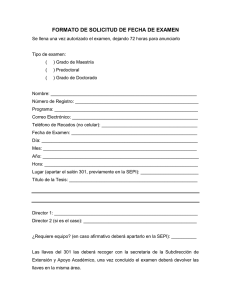
162 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008 Reconfiguración de sistemas de distribución utilizando el Método de Newton en formulaciones cuadráticas H. P. Schmidt, A.M.G.Cabezas, N. Kagan, Senior Member, IEEE, M.R. Gouvêa, y P. Agozzini Resumen— El problema de reconfiguración de sistemas de distribución consiste en obtener el estado de todas las llaves existentes en un conjunto de alimentadores de distribución primarios, de forma tal que se optimice una determinada función objetivo, típicamente para minimizar la pérdida eléctrica total. Se trata de un problema de optimización no lineal entero mixto, en el cual las variables enteras representan el estado de las llaves, y las variables continuas representan el flujo de corriente en los tramos de la red. En este artículo se presentan nuevas formulaciones cuadráticas para la parte continua del problema. Se demuestra que todas las formulaciones conducen a problemas convexos, lo que garantiza que exista una solución global única (en este caso un mínimo) y permite utilizar el Método de Newton de forma eficiente. Se presenta también una nueva variante de busca entera basada en el Método Ramifica y Corta conocido en la literatura como Branch and Bound. Las formulaciones propuestas se aplicaron a tres sistemas de distribución distintos y se muestran y analizan los resultados obtenidos. Palabras clave— Distribución de energía (power distribution), Minimización de pérdidas (loss minimization), Reconfiguración de sistemas (system reconfiguration). I. NOMENCLATURA p vp Ip cjk rjk xjk Ijk ijk ΩB ΩBp ~ i ~ v índice de tensión de barra tensión en la barra p (p.u.) corriente inyectada en la barra de carga p (p.u.) factor de capacidad del tramo jk (p.u.) resistencia eléctrica del tramo jk (p.u.) reactancia eléctrica del tramo jk (p.u.) corriente eléctrica a través del tramo jk (A) corriente eléctrica a través del tramo jk (p.u.) conjunto de tramo en la red conjunto de tramos conectados a la barra de carga p vector de las corrientes en los trechos (p.u.) vector de las tensiones en los nodos (p.u.) H.P. Schmidt, N.Kagan y M.R.Gouvêa imparten docencia en la Escuela Politécnica de la Universidad de São Paulo, CP 61548, 05424-970, São Paulo, Brasil (correos e.: [email protected]; [email protected]; [email protected]). A.M.G. Cabezas es candidata al título PhD en la Escuela Politécnica de la Universidad de São Paulo, CP 61548, 05424-970, São Paulo, Brasil (correo e.: [email protected]). P.Agozzini imparte docencia en el Instituto de Matemáticas y Estadística de la Universidad de São Paulo, 05508-090, São Paulo, Brasil (correo e.: [email protected]). E II. INTRODUCCIÓN L tema de reconfiguración de sistemas de distribución ha sido estudiado en las últimas décadas a través de distintos enfoques. En [2]-[6] los autores utilizan técnicas heurísticas, en [7]-[9] se emplean algoritmos genéticos y lógica difusa, y en [10] el problema de reconfiguración se aborda mediante la técnica de recocido simulado. Con dicha finalidad también se utilizaron las redes neuronales artificiales [11]. En el trabajo que se presenta, la función objetivo a ser minimizada está representada por la pérdida total del sistema. Ante el rápido desarrollo de la automatización de los sistemas de distribución, las pérdidas están desempeñando un papel importante en la planificación operacional de estos sistemas. En el caso de los sistemas de distribución en Brasil, las pérdidas técnicas tienen un gran impacto sobre las tarifas de distribución de electricidad. En la formulación propuesta las variables independientes se encuentran en las siguientes categorías: (a) binaria, destinadas a representar el estado de las llaves (abierto o cerrado), y (b) continuas, para representar el flujo de corriente eléctrica en los tramos, así como la tensión en cada barra. Como la pérdida total es una función cuadrática del flujo de corriente, este problema se incluye en la categoría de Programación No Lineal Entera Mixta. Además del aspecto no lineal, este tipo de problema es difícil de resolver debido a que el número de soluciones posibles crece exponencialmente con la cantidad de llaves, lo que impide la aplicación de técnicas sencillas como la busca exhaustiva. También hay que considerar la restricción de radialidad, que exige soluciones sin mallas. No existe una forma simple de incorporar la radialidad en la formulación del problema de forma analítica, la mejor estrategia consiste en hacer que la busca entera examine e identifique soluciones radiales. En [1] se impuso esta restricción igualando el número de tramos de conducción al número de nodos de carga, lo cual representa una condición necesaria pero no suficiente para garantizar la radialidad. En ese mismo trabajo se desarrolló una formulación preliminar para el problema de reconfiguración de sistemas de distribución, formulación que fue probada con éxito en varios sistemas de distribución. La parte continua del problema se resolvió mediante el Método de Newton convencional. En todos los casos de estudio los autovalores de la matriz Hessiana resultaron positivos, lo que significa que los problemas eran convexos y de esta forma se garantizó que cada solución encontrada por el Método de Newton era única. GARCÍA CABEZAS et al.: RECONFIGURATION OF DISTRIBUTION 163 En cuanto a la parte entera del problema, se utilizó una eficiente técnica de busca en profundidad, la cual proporcionó soluciones sub-óptimas de alta calidad pero no garantizó una solución óptima particular. En el presente artículo se demuestra que la formulación original siempre conduce a problemas convexos. Además, la nueva formulación cuadrática desarrollada en este trabajo elimina las principales hipótesis asumidas en el trabajo precedente para simplificar este problema, también permite el cálculo de las tensiones de barras manteniendo tiempos de procesamiento pequeños, inclusive para redes grandes. El beneficio principal de la aplicación del Método de Newton convencional a problemas cuadráticos consiste en la convergencia en una única iteración, beneficio este que se mantiene en la nuevas formulaciones. Además, la introducción del Método Branch-and-Bound en la parte entera del problema permite identificar soluciones óptimas, así como otras soluciones mejores que las soluciones sub-óptimas obtenidas a través de la busca en profundidad. El artículo está organizado de la siguiente forma. En la sección III se presentan los aspectos más importantes de la metodología propuesta, incluyendo la característica convexa de todas las formulaciones, las formulaciones en sí y la aplicación del Método Branch-and-Bound. En la sección IV se describe la aplicación de las formulaciones en tres casos, que incluye un sistema de validación con 96 tramos y 28 llaves, y un sistema real con 1128 tramos y 129 llaves. Por último, en la sección V se presentan las conclusiones del artículo y se plantean algunas orientaciones para trabajos posteriores. III. METODOLOGÍA En este trabajo, se utiliza el Método de las Penalidades Externas [11] para convertir un problema de optimización con restricciones en un problema sin restricciones. La Ecuación (1) muestra la función objetivo sin restricciones correspondiente a la primera formulación (Formulación 1), para un determinado perfil de llaves: ⎛ ⎞ rjk ⋅ c ⋅ i + K ⋅ ∑ ⎜ ∑ c jk ⋅ i jk + I p ⎟ ∑ ⎜ ⎟ jk ∈Ω B p ⎝ jk ∈Ω Bp ⎠ 2 jk 2 jk I max trecho c jk = , I base (2) Donde Imax trecho es la corriente máxima por el tramo jk (A) y Ibase es la corriente de base (A) del sistema por unidad adoptado. También, la corriente de tramo en p.u está definida como la corriente de tramo real en amperes como una fracción de su corriente máxima: i jk = I jk I max trecho . (3) De (2) y (3) se deriva que la corriente de tramo en p.u en el sistema por-unidad es c jk ⋅ i jk . Estas definiciones permiten que la restricción de capacidad para el tramo jk se exprese de forma simple como: (4) i 2jk ≤ 1 La convexidad de la Formulación 1 será mostrada a través de un simple sistema representado en la Fig. 1. i12 1 2 G I2 i13 i23 3 I3 Fig. 1. Sistema de 3 barras En este caso, la función objetivo toma la forma: A. Formulación 1 y problema de convexidad ~ min L( i ) = El factor de capacidad cjk, que es constante para cada tramo, se define como: 2 (1) ~ En esta ecuación, el símbolo i representa el vector de todas las corrientes de tramos, cuyo valor tiene que ser determinado. El símbolo L(i~) representa la función a minimizar, la cual tiene en cuenta la pérdida total y los términos de penalización. El parámetro K permite controlar el peso relativo de los términos de penalización, y puede determinarse por experimentación como se describe en la Sección III. El término de penalización representa la contribución de la componente de la Ley de Corrientes de Kirchhoff (LCK) aplicada a todas las barras de carga p; está elevado al cuadrado debido a que los desvíos de las corrientes negativas e positivas tienen que ser igual a cero. 2 2 L (i12 , i13 , i 23 ) = r12 c122 i122 + r13 c132 i132 + r23 c 23 i 23 ′ i 23 + I 2 ) + K (c12 i12 + c 23 + K (c13 i13 + c 23 i 23 + I 3 ) (5) 2 2 Nótese que el signo de los factores de capacidad en (5) tiene que seleccionarse correctamente para la aplicación de la ′ = −c 23 . LCK; por ejemplo, c 23 La Ecuación (5) puede reescribirse como: ( r c i + 0 ⋅ i + 0 ⋅ i − 0) + (0 ⋅ i + r c i + 0 ⋅ i − 0 ) + (0 ⋅ i + 0 ⋅ i + r c i − 0 ) + ( K c i + 0 ⋅ i + K c′ i − (− + (0 ⋅ i + K c i + K c i − (− L (i12 , i13 , i23 ) = 2 12 12 12 13 23 2 12 13 13 13 23 2 12 13 12 12 12 o, usando notación matricial: 23 23 23 13 23 23 13 13 23 23 )) K I )) K I2 2 2 3 164 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008 2 0 ⎡ ⎤ ⎢ ⎥ 0 ⎡i12 ⎤ ⎢ ⎥ ⎥ = w−b L(i12 , i13 , i23 ) = A ⋅ ⎢⎢i13 ⎥⎥ − ⎢ 0 ⎢ ⎥ ⎢⎣i23 ⎥⎦ ⎢− K ⋅ I 2 ⎥ ⎢⎣ − K ⋅ I 3 ⎥⎦ 2 (6) donde la matriz A está dada por: ⎡ r12 c12 ⎢ ⎢ 0 A=⎢ 0 ⎢ ⎢ K c12 ⎢ 0 ⎣ 0 r13 c13 0 0 K c13 ⎤ ⎥ 0 ⎥ . r23 c 23 ⎥ ⎥ ′ ⎥ K c 23 K c 23 ⎥⎦ 5 x 3 0 (7) ~ (1) ~ ( 0 ) ~ −1 i = i − [H 1 ] ⋅ G ( i ( 0 ) ) , En (6), el vector w puede verse como una combinación lineal de las columnas C1, C2 y C3 de la matriz A; por tanto, el vector w yace en el espacio S generado por estas columnas, como se representa en la Fig. 2. b w’-b C3 C1 C2 w w-b válida también para cualquier red, debido a que los términos de pérdidas solo contribuyen en los elementos de la diagonal, como se puede apreciar en (5) y (7). En lugar de resolver (8), en este trabajo las corrientes de los trechos se calculan mediante la aplicación del Método de Newton convencional directamente en (1). Esto permite incorporar fácilmente otras restricciones, como la restricción de capacidad del tramo. Al mismo tiempo, el costo computacional no se incrementa porque el Método de Newton converge en una única iteración cuando se aplica a formulaciones cuadráticas, como la (1). La aplicación del Método de Newton convencional a (1) conduce a la siguiente regla de actualización [11]: w’ (9) donde los superíndices 0 y 1 indican el orden de la iteración (la iteración 0 se refiere a la condición inicial), H1 es la matriz Hessiana y G es el vector gradiente en la iteración 0. En particular, la matriz Hessiana es constante ya que la función objetivo es cuadrática. Debe notarse que la matriz Hessiana refleja la topología de la red y de esta manera es una matriz altamente dispersa. La Formulación (1) puede modificarse para incorporar las restricciones de capacidad de trecho. En este caso, para cada trecho sobrecargado se añade un término de penalización a la función objetivo (1): S - espacio generado por las columnas de A C ⋅ f (i jk ) , (10) Fig. 2. Representación gráfica de la ecuación (6) En esta figura se representan dos combinaciones lineales diferentes (w y w’). El vector independiente b en (6) está representado también. En (6), la función objetivo L(.) se puede ver como el cuadrado de la norma del vector (w-b). Observando la Fig. 2 queda claro que la función objetivo tendrá su valor mínimo cuando el vector (w-b) sea ortogonal a S. La condición de ortogonalidad se fuerza haciendo el producto escalar del vector (w-b) con cada una de las columnas de la matriz A igual a cero, lo cual lleva a la siguiente expresión: ⎡i12 ⎤ A ⋅ A ⋅ ⎢⎢i13 ⎥⎥ = At ⋅ b . ⎢⎣i23 ⎥⎦ (8) t ~ La ecuación (8) permite calcular el vector i justamente por la resolución de un conjunto de ecuaciones lineales. Además, nótese que las tres primeras filas de la matriz A tienen solamente elementos no-cero en la diagonal, y asumiendo que todas las resistencias y factores de capacidad son estrictamente positivos, se concluye que el rango de la matriz A es igual a 3, o sea, el número de tramos en la red. Por esta razón, la matriz (A t ⋅ A ) en (8) no es singular, lo cual prueba que la formulación (1) es convexa. La propiedad de convexidad es donde C es un parámetro que permite controlar el peso relativo de la restricción de capacidad en la función objetivo completa, y la función f(.) está dada por: ⎧ (i jk + 1)2 ⎪ 0 f (i jk ) = ⎨ ⎪ (i − 1)2 ⎩ jk si i jk < − 1 . si − 1 ≤ i jk ≤ + 1 si i jk > + 1 (11) Al utilizar los términos de penalización adicionales dados en (10) y (11), la formulación del problema mantiene su naturaleza cuadrática. Durante la solución de (9), se verifica en cada trecho la existencia de sobrecarga según (4). Si se encuentra un tramo jk sobrecargado, se añade en (1) el correspondiente término de penalización para obtener así una solución sin sobrecarga en los tramos. B. Formulación 2 En este caso, las corrientes de los tramos están representadas por números complejos, como se muestra: i jk = i jk , R + ji jk , I , (12) y se asume que los ángulos de las tensiones de barra tienen valor cero, igual que en el caso anterior. GARCÍA CABEZAS et al.: RECONFIGURATION OF DISTRIBUTION ~ ~ min L ( iR , iI ) = ( ∑ r jk ⋅ c 2jk ⋅ i 2jk , R + i 2jk , I ) jk ∈Ω B 2 ⎛ ⎞ . + K ⋅ ∑ ⎜ ∑ c jk ⋅ i jk , R + I p , R ⎟ ⎜ ⎟ p ⎝ jk ∈Ω Bp ⎠ ⎛ + K ⋅ ∑ ⎜ ∑ c jk ⋅ i jk , I + I p , I ⎜ p ⎝ jk ∈Ω Bp ⎞ ⎟ ⎟ ⎠ (13) −1 ~ 0 ⎤ ⎡G ( iR( 0 ) ) ⎤ , ⋅ ⎢ ⎥ H 1 ⎥⎦ ⎣G (~ iI ( 0 ) ) ⎦ (14) ~ donde iR( 0) indica el vector columna que contiene la parte real de todas las corrientes de tramo en la iteración 0, G(~ iR(0) ) es el vector columna formado por las derivadas de la función objetivo con respecto a la parte real de cada una de las corrientes de trecho, y el subíndice “I” indica la entidad correspondiente para la parte imaginaria. Debe señalarse que la submatriz H1 en (14) es exactamente igual a la que aparece en la Formulación 1. La ecuación (14) también representa dos sistemas de ecuaciones independientes, lo cual permite ensamblar y factorizar la matriz H1 una sola vez siempre que se resuelva (14). Esta característica permite economizar esfuerzo computacional, especialmente para redes grandes. C. Formulación 3 Esta formulación incorpora el cálculo de las tensiones de barra en el problema de optimización, lo que constituye un aspecto importante dentro del contexto de calidad del servicio. La Ecuación (15) representa la caída de tensión a través de un tramo genérico jk: v& j − v&k = c jk ⋅ (i jk , R + ji jk , I ) ⋅ (r jk + jx jk ) [ ⋅ (r ] = c jk ⋅ (r jk i jk , R − x jk i jk , I ) + j (r jk i jk , I + x jk i jk , R ) . ≅ c jk i jk jk , R − x jk i jk , I ) tensión en el extremo receptor (barra k) tiene ángulo cero, entonces la tensión en el extremo de envío tiene ángulo cero también (y así para todas las barras de la red). Por tanto, la caída de tensión en cualquier trecho se puede representar por la siguiente expresión real: v j − v k = c jk ⋅ (r jk i jk , R − x jk i jk , I ) 2 En esta ecuación se consideran las partes real e imaginaria de las corrientes de los tramos para el cálculo de la pérdida total y la ejecución de la LCK. La aplicación del Método de Newton convencional en (13) produce la siguiente regla de actualización (nótese que existe una simetría de las partes real e imaginaria de las corrientes de tramos con respecto a la función objetivo): ~ ~ ⎡ iR(1) ⎤ ⎡ iR( 0 ) ⎤ ⎡ H 1 ⎢~ (1) ⎥ = ⎢ ~ ( 0 ) ⎥ − ⎢ ⎣ iI ⎦ ⎣ iI ⎦ ⎣ 0 165 (15) El último paso en (15) es común en sistemas de distribución. La componente imaginaria de la caída de voltaje se puede despreciar en la mayoría de las situaciones sin comprometer la precisión de los resultados. Esto se debe a la separación de fase y los conductores típicos utilizados en sistemas de distribución. Asumiendo que la caída de voltaje a través de cualquier trecho puede representarse mediante un número real puro (como se indica en (15)), y también que la (16) La incorporación de (16) en la función objetivo se logra a través dos términos de penalización asociados, de la misma forma que la LCK. La expresión (17) muestra la función objetivo para la Formulación 3: ~ ~ min L( iR , iI , v~ ) = ∑r jk ∈Ω B jk ( ⋅ c 2jk ⋅ i 2jk , R + i 2jk , I ⎛ ⎞ + K ⋅ ∑ ⎜ ∑ c jk ⋅ i jk , R + I p , R ⎟ ⎜ ⎟ p ⎝ jk ∈Ω Bp ⎠ ⎛ + K ⋅ ∑ ⎜ ∑ c jk ⋅ i jk , I + I p , I ⎜ p ⎝ jk ∈Ω Bp + ΔV ⋅ ∑ (v jk ∈Ω B ⎞ ⎟ ⎟ ⎠ ) 2 , (17) 2 − v k − c jk r jk i jk , R + c jk x jk i jk , I ) 2 j donde el parámetro ΔV permite controlar el peso relativo del término de penalización para la caída de tensión. Igual que en el caso precedente, la aplicación del Método de Newton convencional en (17) produce la siguiente regla de actualización: ~ ~ ⎡ iR(1) ⎤ ⎡ iR( 0) ⎤ ⎡ H 1 ⎢~ (1) ⎥ ⎢~ ( 0) ⎥ ⎢ ⎢ iI ⎥ = ⎢ iI ⎥ − ⎢ 0 ⎢v~ (1) ⎥ ⎢v~ ( 0) ⎥ ⎣⎢ H VR ⎣ ⎦ ⎣ ⎦ 0 H1 H VI H RV ⎤ H IV ⎥⎥ H VV ⎦⎥ −1 ~ ⎡G( iR( 0 ) )⎤ ⎢ ~ ⎥. ⋅ ⎢G ( iI ( 0 ) )⎥ ⎢G (v~ ( 0 ) )⎥ ⎣ ⎦ (18) En (17) se puede agregar un término de penalización adicional para considerar las necesidades de tensión mínima. En este caso, para cada barra que presente un valor de tensión menor que la tensión mínima Vmin especificada, se añade el siguiente término de penalización a la función objetivo (17): V M ⋅ g (v j ) , (19) donde el parámetro VM permite controlar el peso relativo de la restricción de tensión mínima, y la función g(.) está dada por: ⎧(v − V min )2 g (v j ) = ⎨ j 0 ⎩ si v j < V min . caso contrario (20) D. Conflicto entre restricciones El Método de las Penalizaciones Externas facilita la resolución del problema de optimización, pero tiene la desventaja de permitir conflictos potenciales entre las restricciones. Esto sucede, por ejemplo, entre las restricciones de tensión mínima y la LCK. Cuando se detecta una tensión baja en un nodo 166 determinado, la restricción de tensión mínima aumenta la tensión en ese nodo. Como consecuencia, deben modificarse las corrientes de los tramos restringiendo la caída de tensión. Al final, estas nuevas corrientes pueden no satisfacer la LCK. En este trabajo la restricción de tensión mínima no se incorpora en las iteraciones de Newton, evitando así este conflicto (significa que los términos de penalización dados en (19) no tienen contribución en la matriz Hessiana ni en el vector gradiente). No obstante, los valores de penalización asociados a esta restricción se consideran durante la búsqueda entera. La última expresión en (17) representa los términos de penalización asociados a la restricción de caída de tensión (Ley de Ohm). Es importante observar que la restricción de caída de tensión no provoca ningún conflicto con la LCK, debido a que las tensiones de los nodos solo aparecen en la restricción de caída de tensión. E. Búsqueda Entera – Método Branch-and-Bound El propósito de la búsqueda entera es determinar el estado de todas las llaves (abierto o cerrado), considerando que la solución final debe ser radial. Se utilizó una simple técnica de búsqueda en profundidad, donde todas las llaves están inicialmente cerradas y el algoritmo va abriendo una a una hasta alcanzar el número necesario de llaves abiertas. La decisión sobre la elección de apertura de una llave se basa en el incremento de pérdida que podría originar la llave candidata. Para estimar este incremento se utilizaron dos métodos, denominados Método A y Método B [1]. El Método A, que es más rápido pero menos preciso, utiliza una estimación aproximada del incremento de pérdida, calculada a partir de los elementos de la diagonal de la matriz Hessiana. El Método B considera una llave de cada vez; abre temporalmente una llave candidata y ejecuta un flujo de potencia completo mediante la resolución de (9), (14) o (18). Al finalizar este proceso, la llave que produjo el menor incremento de la función objetivo se abre de forma permanente. A pesar que la técnica de búsqueda en profundidad produce soluciones sub-óptimas de alta calidad, no garantiza que la solución final sea la solución óptima deseada. Por esta razón, se realizaron estudios adicionales para mejorar la búsqueda entera. La nueva estrategia de busca se basa en el Método Branch and Bound [12]. En este trabajo el Branch and Bound se implementó como un algoritmo de búsqueda en profundidad complementado con retroceso en el árbol de búsqueda, como se representa en la Fig. 3. Con respecto al diagrama de la Fig. 3, la solución inicial corresponde a la red operando con todas las llaves cerradas. Las condiciones para decidir ejecutar un retroceso son las siguientes: • Test T1 [12] descarta una solución no radial porque su pérdida total es mayor que la pérdida total de la mejor solución radial encontrada hasta ahora (todas las soluciones radiales descendientes de una solución no radial determinada tendrán un valor de pérdida total mayor o igual que la pérdida total de la solución no radial), o IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008 • • La solución ya es radial (no se pueden abrir más llaves porque dejaría barras desconectadas), o La solución no tiene llaves libres para abrir. Generar solución inicial (“solución”) Mientras exista “solución” Si Realizar retroceso ? No Generar solución hija solución ← solución padre solución ← solución hija Aplicar Test T3 si solución es radial Fig. 3. Búsqueda entera con Branch and bound Si la solución actual es radial, el algoritmo Test T3 [12] en la Fig. 3 la compara con la mejor solución radial encontrada hasta ahora, actualizando esta última si la pérdida total de la solución actual es menor que el valor obtenido hasta ahora. El concepto de “llave libre” es extremadamente importante en esta implementación. El está asociado a las llaves que permanecen cerradas en una determinada solución. En la solución inicial todas las llaves están cerradas y el atributo “libre”de cada una es puesto en on. Para generar soluciones hijas de la solución actual, se selecciona la primera llave libre en la lista ordenada de llaves candidatas (esta lista contiene todas las llaves cerradas, en orden ascendiente según el incremento de pérdida que su apertura causaría). Si existe una llave libre, entonces se abre y se genera una solución hija. Finalmente, debe puntualizarse que tanto el Método B (búsqueda en profundidad) como el Método Branch and Bound utilizan la función objetivo completa (dada por (1), (13) o (17)), e incluyen términos de la restricción de tensión mínima (si existe) para seleccionar la mejor opción de apertura de llave durante la búsqueda entera. IV. RESULTADOS La metodología descrita en la sección precedente fue implementada como un programa computacional. El programa permite combinar las dos estrategias de búsqueda (búsqueda en profundidad y Branch and Bound) con las tres formulaciones (F1, F2 y F3). En esta sección se presentan y muestran los resultados de la aplicación de la metodología a tres casos de estudio (Caso 1, 2 y 3). En todos los casos fue utilizado un computador con procesador de 3 GHz. A. Caso 1 La Fig. 4 muestra la red eléctrica para el Caso 1, la cual fue propuesta por Baran y Wu [4] y se ha tornado un estándar de comparación para algoritmos de reconfiguración. La red está GARCÍA CABEZAS et al.: RECONFIGURATION OF DISTRIBUTION constituida por 32 barras de carga, 1 barra de alimentación, 37 tramos con llave y 0 tramos sin llave. El número necesario de llaves abiertas es 37-32 = 5. En este caso, los intereses principales son la pérdida total y los niveles de tensión. Fig. 4. Caso 1 En la Tabla 1 se muestran los resultados más relevantes para la búsqueda en profundidad con el Método A (con el Método B se obtuvieron resultados exactamente iguales en este caso). La Tabla 2 muestra los resultados correspondientes para el Branch and Bound. TABLA 1. RESULTADOS PARA EL CASO 1 – BÚSQUEDA EN PROFUNDIDAD CON MÉTODO A Formulación → F1 F2 F3 Parámetro ↓ Pérdida inicial (todas las llaves 124.5023 113.3862 cerradas) (kW) 6-7 6-7 8-9 8-9 13-14 13-14 Llaves abiertas 24-28 24-28 31-32 31-32 Pérdida final (kW) 139.6280 127.3557 Llaves incorrectamente 31-32 abiertas1. Llaves incorrectamente 30-31 cerradas1. 0.5358 kW Diferencia de Pérdidas1 0.39 % Flujos de potencia calculados 6 Tiempo de procesamiento (s) < 0.001 < 0.001 0.016 1 Con respecto a la solución optima determinada través del Branch and Bound (Tabla 2) TABLA 2. RESULTADOS PARA EL CASO 1 - BRANCH AND BOUND (SOLUCIÓN ÓPTIMA) Formulación → F1 F2 F3 Parámetro ↓ 6-7 6-7 8-9 8-9 Llaves abiertas 13-14 13-14 24-28 24-28 30-31 31-32 Pérdida final (kW) 139.0922 127.3557 Flujos de potencia calculados 13531 13531 13657 Tiempo de procesamiento (s) 3.468 4.703 9.816 En las Tablas 1 y 2 se puede observar que con la búsqueda en profundidad se obtuvo la solución óptima con las 167 Formulaciones 2 y 3 (igual para ambas). En el caso de la Formulación 1, se encontró una solución sub-óptima muy próxima de la solución óptima (diferencia de 0.3558 kW). También, el tiempo de procesamiento para la búsqueda en profundidad fue insignificante. La solución que se obtuvo a través de la Formulación 1 es diferente de la solución óptima con las Formulaciones 2 y 3. Esto se debe a que en la Formulación 1 se aplicó a todas las cargas un factor de potencia de 0.85, mientras que en las Formulaciones 2 y 3 se consideró el valor de factor de potencia real de cada carga. La Tabla 3 muestra una comparación entre la solución óptima alcanzada a través de la Formulación 3 sin restricción de tensión mínima, y la solución correspondiente al incluir esta restricción. TABLA 3. IMPACTO DE LA RESTRICCIÓN DE VOLTAJE MÍNIMO Restricción de Voltaje Mínimo No incluída Incluída Parámetro VM (19) 100 Parámetro Vmin (pu) (20) 0.98 6-7 7-20 8-9 8-9 Llaves abiertas 13-14 13-14 24-28 27-28 31-32 31-32 Pérdidas (kW) 127.3557 131.7623 Term. de penaliz. Voltaje 0 1,.046342 Mínimo (pu) Función Objetivo (pu) 0.001273585 1.047659 Cuando el término de penalización de tensión mínima es mayor que cero significa que esta restricción no se satisfizo para todas las barras. Esta situación se origina por la carga del sistema y los valores para tensión mínima relativamente altos (0.98 p.u). También debe señalarse que la aplicación de esta restricción produce una solución óptima diferente, en la cual la pérdida total aumenta de 127.3557 kW a 131.7623 kW. B. Precisión del modelo de flujo de potencia En esta subsección se comparan los resultados del modelo de flujo de potencia propuesto con los resultados del modelo convencional de Newton-Raphson. La Tabla 4 muestra esta comparación; sólo se incluyeron en la tabla los 5 valores con mayor diferencia de tensión. TABLA 4. Barra 8 7 9 10 11 PRECISIÓN DEL MODELO DE FLUJO DE POTENCIA Tensión NewtonTensión modelo Diferencia (%) Raphson (pu) (A) propuesto (pu) (B) [100*(B-A)/A] 0.9609 0.9610 0.01 0.9641 0.9642 0.01 0.9641 0.9642 0.01 0.9642 0.9643 0.01 0.9645 0.9646 0.01 El valor de pérdida calculado a través del modelo NewtonRaphson es 127.4820 kW, mientras que el modelo propuesto obtuvo 127.3557 kW. Estas diferencias mínimas muestran una excelente concordancia entre ambos modelos. 168 C. Caso 2 La red eléctrica mostrada en la Fig. 5 contiene 83 barras de carga, 3 barras de alimentación, 68 tramos sin llaves y 28 tramos con llave. El número necesario de llaves cerradas es 83-68 = 15; por tanto, son necesarias 28-15 = 13 llaves abiertas. IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008 El Método A de búsqueda en profundidad generó una solución sub-óptima en la cual se abrieron dos llaves de forma incorrecta, por tanto, otras dos llaves se cerraron incorrectamente. La diferencia de pérdida total con relación a la solución óptima fue del 5.48%. Por otra parte, el Método B generó una solución sub-óptima muy próxima de la óptima: sólo se abrió incorrectamente una llave. Con este método la diferencia en término de pérdida total fue del 0.14%. D. Caso 3 Este caso corresponde a un sistema de distribución real, constituido por 5 alimentadores primarios con características rurales y urbanas mezcladas, 1107 barras de carga, 999 tramos sin llave y 129 tramos con llave. La solución radial para este sistema debe tener 108 llaves cerradas (= 1107-999) y 21 llaves abiertas (= 129-108). Fig. 5. Caso 2 En este caso la búsqueda en profundidad requirió 14 pasos, 1 para el cálculo de flujo de potencia inicial con todas las llaves cerradas, y 13 para operaciones de apertura. En la Tabla 5 se muestran los resultados obtenidos con los Métodos A y B de búsqueda en profundidad, mientras que la Tabla 6 muestra los resultados correspondientes para el Branch and Bound. TABLA 5. RESULTADOS PARA EL CASO 2 – BÚSQUEDA EN PROFUNDIDAD Método A Método B Formulación → F1 F2 F3 F1 F2 F3 Parámetro ↓ Pérd. inicial (llaves 1065.360 1065.360 cerradas) (kW) Pérdida final (kW) 132.070 1253.222 Llaves abiertas 23-26 38-64 23-26 incorrectamente1 Llaves cerradas 20-36 23-25 20-36 incorrectamente1 Diferencia de 68.54 kW 5.48% 1.692 kW 0.14% pérdidas1 Tiempo de 0.015 0.016 0.078 0.047 0.062 0.265 procesamiento (s) 1 Con respecto a la solución óptima determinada a través del Branch and Bound (Tabla 6) TABLA 6. RESULTADOS PARA EL CASO 2 - BRANCH AND BOUND (SOLUCIÓN ÓPTIMA) Formulación → F1 F2 F3 Parámetro ↓ 12 -61 13-76 14-17 15-19 Llaves abiertas 18-34 20-24 20-36 23-25 39-43 48-69 50-51 52-85 70-86 Pérdidas (kW) 1251.530 Tiempo de procesamiento (s) 496.719 891.954 1247.406 En este caso las tres formulaciones llegaron a la misma solución. Esto se debe a que el factor de potencia para todas las cargas es 1.0, significa que la red eléctrica es la misma en las tres formulaciones. La Tabla 7 muestra los valores de pérdida total y tiempo de procesamiento para la búsqueda en profundidad utilizando los Métodos A y B. En este sistema todas las cargas tienen factor de potencia igual a 1.0, lo que ocasiona que las 3 formulaciones generen la misma solución con cada método. TABLA 7. RESULTADOS PARA EL CASO 3 – BUSCA EN PROFUNDIDAD Método A Método B Formulación → F1 F2 F3 F1 F2 F3 Parámetro ↓ Pérdida inicial (todas las 103.7189 llaves cerradas) (kW) Pérdida final (kW) 144.9565 Flujos de potencia calc. 22 Tiempo de procesamiento 4.48 5.12 10.69 (s) 103.7189 129.7397 64 32.31 33.81 107.51 En la tabla anterior se puede observar que la solución que se obtuvo con el Método B es mejor que la del Método A, a expensas de un tiempo de procesamiento mayor. En esta red grande se tornan evidentes las diferencias en término de tiempos de procesamiento entre las 3 Formulaciones. El Método Branch-and-Bound en la Formulación 1 obtuvo 204 soluciones en 8 segundos aproximadamente. De éstas, 9 soluciones fueron mejores que la mejor solución encontrada a través de la búsqueda en profundidad con el Método A (Pérdida total de 144.9565 kW, Tabla 7). La mejor solución identificada por el Método Branch and Bound obtuvo un valor de pérdida total de 126.1418 kW. V. CONCLUSIÓN El problema de reconfiguración de sistemas de distribución manifiesta ciertas características que dificultan su resolución. Entre ellas destacan: (a) la relación cuadrática entre las corrientes en los tramos y las pérdidas eléctricas, (b) la naturaleza combinatoria originada por las variables binarias que representan las llaves, y (c) la restricción de radialidad, que no permite la existencia de mallas en la solución optimizada. Este trabajo presentó tres nuevas formulaciones para la parte continua del problema de reconfiguración de sistemas de distribución, particularmente para el cálculo de corrientes en los GARCÍA CABEZAS et al.: RECONFIGURATION OF DISTRIBUTION tramos y tensiones de barra. La Formulación 2 proporciona un modelo de carga más detallado con relación a la Formulación 1, además, dado que la matriz Hessiana se factoriza una sola vez para resolver dos conjuntos independientes de ecuaciones lineales, el costo computacional se mantiene en niveles equivalentes. La Formulación 3 proporciona las tensiones de barra resultantes en el sistema, pero la matriz Hessiana es grande y no se puede subdividir como en la Formulación 2, lo que eleva el costo computacional. Se comprobó analíticamente la convexidad de todas las formulaciones. Esta característica garantiza la existencia de un mínimo global único y hace que Método de Newton sea el candidato por excelencia, al converger en una sola iteración cuando el problema es cuadrático, como es el caso aquí presentado. La Formulación 3 obtiene las corrientes en los tramos y las tensiones de barras mediante una simplificación común en sistemas de distribución, en los que el ángulo de desvío entre nodos normalmente es muy pequeño. Los resultados de esta formulación muestran una excelente concordancia con los resultados del modelo completo de Newton-Raphson, el cual valida el modelo de flujo de potencia propuesto. En cuanto a la parte entera, se incorporó el Método Branch and Bound con el objetivo de validar las soluciones suministradas por la búsqueda en profundidad. Además, permitió identificar rápidamente soluciones sub-óptimas de alta calidad. Si el tiempo de procesamiento no es una preocupación, el Branch and Bound se puede utilizar eficazmente para identificar estas soluciones. La implementación del algoritmo básico Branch and Bound utilizada en este trabajo está siendo perfeccionada actualmente con el propósito de reducir su costo computacional. La búsqueda en profundidad también identifica soluciones sub-óptimas de alta calidad, aunque no tantas como el Método Branch and Bound. Con tiempos de procesamiento extremadamente bajos, la búsqueda en profundidad es una fuerte candidata para aplicaciones en tiempo real. REFERENCIAS [1] [2] [3] [4] [5] [6] H. P. Schmidt, N. Ida, N. Kagan and J. C. Guaraldo, "Fast reconfiguration of distribution systems considering loss minimization," IEEE Trans. Power Systems, Vol. 20, N° 3, pp. 1311-1319, Agosto 2005. A. Merlin and H. Back, “Search for a minimal-loss operating spanning tree configuration in an urban power distribution system,” in 5th Power Systems Computation Conference - PSCC, Cambridge, UK, 1975, v. 1, pp.1-18. S. Cinvalar, J. J. Grainger, H. Yin and S. S. H. Lee, “Distribution feeder reconfiguration for loss reduction”, IEEE Trans. Power Delivery, vol. 3, pp. 1217-1223, Julio 1988. M. E. Baran and F. F. Wu, “Network reconfiguration in distribution systems for loss reduction and load balancing”, IEEE Trans. Power Delivery, vol. 4, pp. 1401-1407, Abril. 1989. S. K. Goswami and S. K. Basu, “A new algorithm for the reconfiguration of distribution feeders for loss minimization”, IEEE Trans. Power Delivery, vol. 7, pp. 1484-1491, Julio 1992. R. Cherkaoui, A. Bart and A. J. Germond, “Optimal configuration of electrical distribution networks using heuristic methods,” in 11th Power Systems Computation Conference - PSCC, Avignon, Francia, 1993, v. 1, pp.147-154. 169 [7] N. Kagan and C. C. B. de Oliveira, “Fuzzy decision model for the reconfiguration of distribution networks using genetic algorithms,” in 13th Power Systems Computation Conference - PSCC, Trondheim, Noruega, 1999. [8] B. Venkatesh, R. Ranjan, and H. B. Gooi, “Optimal reconfiguration of radial distribution systems to maximize loadability”, IEEE Trans. Power Systems, Vol. 19, Issue 1, pp. 260-266, Febrero 2004. [9] D. Das, “A Fuzzy Multiobjective Approach for Network Reconfiguration of Distribution Systems”, IEEE Trans. Power Delivery, Vol. 21, N° 1, pp. 202–209, Enero. 2006. [10] H. C. Chang and C. C. Kuo, “Network reconfiguration in distribution systems using simulated annealing,” Electric Power Systems Research, v. 29, pp. 227-238, 1994. [11] A. Cichocki, R. Unbehauen, Neural networks for optimization and signal processing, John Wiley and Sons, 1993. [12] F. S. Hillier and G. J. Lieberman, Introduction to operations research, New York: McGraw-Hill, 1997. Hernán Prieto Schmidt nació en Montevideo, Uruguay, el 6 de marzo de 1960. Recibió los títulos de BSc y MSc en Ingeniería Eléctrica en la Escuela Politécnica de la Universidad de São Paulo, Brasil, en 1982 y 1989, respectivamente. En 1994 recibió el título de Ph.D. en Ingeniería Eléctrica en la Universidad de Londres, GB. Desde 1985 es profesor de la Escuela Politécnica de la Universidad de São Paulo, y desde 2005 es Profesor Asociado. Durante 2002-2003 trabajó en un proyecto de pos-doctorado en el área de optimización de sistemas, en la Universidad de Akron (Ohio, EE. UU.). Su área de interés incluye la aplicación de técnicas de optimización y redes neurales artificiales a problemas de planificación y operación en sistemas de distribución, y el desarrollo de herramientas GIS para la operación de sistemas eléctricos de potencia. Ana María García Cabezas nació el La Habana, Cuba, el 5 de marzo de 1967. Recibió el título de Ingeniería en Control Automático en el Instituto Superior Politécnico José Antonio Echeverría, La Habana, Cuba, en 1990. En 2002 recibió el título MSc em Ingeniería Eléctrica en la Escuela Politécnica de la Universidad de São Paulo, Brasil. Actualmente está trabajando para obtener el título Ph.D en la misma universidad en el área de optimización de sistemas de distribución. Nelson Kagan (M’88–SM’04) nació en São Paulo, Brasil, el 8 Octubre de 1960. Recibió los títulos BSc y MSc en Ingeniería Eléctrica en la Escuela Politécnica de la Universidad de São Paulo, Brasil, en 1982 y 1988, respectivamente. En 1993 recibió el título Ph.D. en Ingeniería Eléctrica en la Universidad de Londres, GB. Desde 1983 es profesor del Departamento de Ingeniería Eléctrica de la Universidad de São Paulo. En 1999 presentó su tesis de posdoctorado y pasó a desempeñar funciones de Profesor Asociado. La mayoría de sus trabajos de investigación se relaciona con la calidad de la energía y la planificación de la distribución de energía eléctrica. Se interesa en el área de aplicación de sistemas inteligentes y optimización con múltiples objetivos. Marcos Roberto Gouvêa recibió los títulos BSc, MSc y PhD en la Escuela Politécnica de la Universidad de São Paulo, Brasil, en 1972, 1979 y 1994, respectivamente. Trabajó desde 1972 hasta 1995 en la Themag Ingeniería, una firma de consultoría líder en Brasil. Entre 1998 y 2000 trabajó en la comisión de Servicios Públicos del Estado de São Paulo como jefe de Comisión. Es profesor de la Escuela Politécnica de la Universidad de São Paulo desde 1989. El Dr. Gouvêa es autor de más de 50 artículos técnicos, presentados en congresos y publicados en revistas especializadas. Paulo Agozzini Martin nació en São Paulo, Brasil, el 25 de enero de 1959. Recibió el título BSc en Ingeniería Eléctrica en la Escuela Politécnica de la Universidad de São Paulo, Brasil, en 1982 y el título MSc en Matemáticas en el Instituto de Matemática y Estadística de la Universidad de São Paulo, Brasil, en 1986. En 1991 recibió el título PhD en Matemáticas en el Instituto de Matemática y Estadística de la Universidad de São Paulo.