Movimiento Circular Uniforme - Almagro
Anuncio

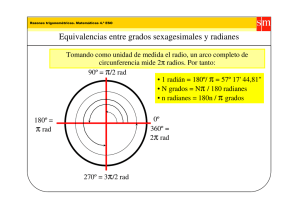
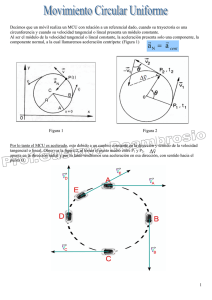
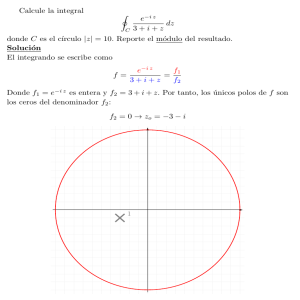
Movimiento Circular Uniforme por Ezequiel Wajs Los movimientos que estudiamos hasta el momento han sido rectilı́neos, o lo que es lo mismo, han ocurrido siempre en la misma dirección o simplemente no doblan. Sin embargo, la mayor parte de los objetos que se mueven a nuestro alrededor suelen cambiar su dirección a lo largo de su trayectoria. A continuación estudiaremos el movimiento no rectilı́neo más simple de todos: el movimiento circular uniforme o MCU. Muchas cosas en nuestro entorno se mueven en MCU: una Vuelta al Mundo o Noria, las boleadoras, la Tierra alrededor del Sol, la Luna alrededor de la Tierra, etc. Sol Tierra La órbita de la Tierra alrededor del Sol es un cı́rculo (más o menos) 1 Cinemática del MCU La cinemática (como ya vimos el año pasado) es la rama de la Fı́sica que estudia el movimiento sin tener en cuenta sus causas. Es decir, cómo es un MCU independientemente de porqué podrı́a llegar a ocurrir. Perı́odo (T ) El MCU es un movimiento periódico, es decir, un movimiento que se repite: una vez que el objeto da una vuelta completa, vuelve a comenzar un nuevo ciclo, idéntico al anterior. La duración de un ciclo se llama Perı́odo y se simboliza con la letra T, el mismo se mide en unidades de tiempo. Para el caso de la Tierra alrededor del Sol, el perı́odo del MCU es de 365,25 dı́as o un año (aproximadamente). Frecuencia (f ) La frecuencia es una magnitud similar al perı́odo: en vez de indicar cuántas unidades de tiempo demora un ciclo indica cuántos ciclos ocurren por unidad de tiempo. Es decir, es la inversa del perı́odo, matemáticamente: f= 1 T Las dos unidades más comunes de frecuencia son el Hertz (Hz) y las revoluciones por minuto (rpm). 1 Hz corresponde a 1 ciclo por segundo y 1 rpm a un ciclo por minuto. Las ondas de radio FM tienen una frecuencia del orden de 100 MHz (Mega Hertz) es decir, completan 100 millones de ciclos en un segundo. Un objeto que da una vuelta por segundo está, entonces, completando 60 vueltas por minuto, por lo tanto, la frecuencia en rpm es: frpm = 60 · fHz Radio (r) El radio del MCU es simplemente el radio del cı́rculo de la trayectoria que describe el objeto, es la distancia desde el centro a cualquier punto de la trayectoria. Para el caso de la Tierra alrededor del Sol, el Sol está ubicado (más o menos) en el centro y el radio es de (aproximadamente) 150 millones de km. Si quisiéramos saber cuanta distancia recorre el cuerpo en un ciclo, entonces debemos calcular el perı́metro del cı́rculo que el cuerpo describe en su MCU: d = 2πr 2 Velocidad Tangencial (~ vt y vt ) La velocidad es una magnitud vectorial, es decir, no alcanza con un número y una unidad para determinarla, hace falta también indicar una dirección. Si la dirección de movimiento en un MCU varı́a constantemente, entonces la velocidad también lo hace, es sencillo de ver en una boleadora: dependiendo del momento en que la soltemos, la misma saldrá disparada en una u otra dirección, la dirección en la que sale disparada es justamente, la dirección de la velocidad para ese punto de la trayectoria. La velocidad es tangente a la trayectoria recorrida. Una tangente es una recta que toca a una curva sin atravesarla y que tiene la misma dirección que la curva en el punto en que se tocan La velocidad es tangente a la trayectoria del MCU Si bien la velocidad cambia constantemente de dirección, no cambia nunca de valor durante un MCU, es decir, el MCU tiene siempre la misma rapidez o módulo de la velocidad, recorre la misma cantidad de distancia por unidad de tiempo en cualquier tramo. La rapidez o módulo de la velocidad (vt ) se calcula como distancia recorrida sobre tiempo transcurrido. Para un MCU, un perı́odo es el tiempo en que se demora en recorrer el perı́metro del cı́rculo, por lo tanto: vt = 3 2πr T Ángulos en radianes (rad) Es importante, para trabajar con MCU, entender el concepto de radián. Los radianes son una forma alternativa de medir ángulos (ası́ como millas es una alternativa a medir kilómetros). En radianes, una vuelta completa equivale a 2π rad, en contraposición a 360◦ . 90◦ entonces serán π2 rad. Básicamente debemos hacer la regla de tres simple para convertir de grados a radianes: 360◦ −→ 2π rad 30◦ · 2π rad π = rad 30◦ −→ x = ◦ 360 6 La utilidad particular de los radianes para el MCU es su relación con los cı́rculos y los ciclos. Se llama arco de circunferencia o arco (A) a la porción de cı́rculo correspondiente al ángulo elegido, gráficamente: A θ r Arco de circunferencia para θ = 60◦ = π3 rad Si θ = 60◦ = π3 rad y r = 2cm entonces el arco de circunferencia debe ser 16 del perı́metro (porque 60◦ es 16 de 360◦ ). El perı́metro es P = 2πr = 2π2cm = 4πcm, = 23 πcm. Si ahora tomamos ese arco y entonces para θ = π3 rad el arco es A = P6 = 4πcm 6 lo dividimos por el radio del cı́rculo: 2 πcm A π = 3 = =θ r 2cm 3 Que es el ángulo del arco medido en radianes. Es decir, la relación (división) del arco y el radio es siempre la misma para el mismo ángulo, sin importar el tamaño del cı́rculo. Otra conclusión importante que se puede observar en el ejemplo es que el ángulo en radianes es en realidad aunitario (no tiene unidades) ya que los cm (u otra unidad de distancia) del numerador se simplifican con los del denominador. Cuando escribimos rad después de un ángulo medido en radianes, es en realidad una pequeña mentira, ya que los radianes no tienen unidad. Resumiendo Hay otra forma de medir ángulos, llamada radianes y en este sistema una vuelta completa (360◦ ) equivale a 2π (rad), la unidad es, en realidad, ficticia. Los radianes, ası́ como los grados son cı́clicos, dos vueltas y media son 900◦ (2, 5 · 360◦ ), en radianes, dos vueltas y media equivalen a 5π (2, 5 · 2π). Por último, para un cı́rculo, el arco de circunferencia es igual al ángulo medido en radianes por el radio de la circunferencia: A=θ·r 4 Velocidad Angular (ω) La velocidad angular es una forma alternativa de medir la velocidad con la que se recorre el MCU, en vez de indicar la velocidad en términos de la relación entre distancia que se recorre y el tiempo transcurrido, se mide la velocidad en términos de las vueltas medidas angularmente (1 vuelta = 360◦ = 2π rad) y el tiempo transcurrido. Cómo un perı́odo (T) es el tiempo que se tarda en dar una vuelta completa (2π rad), la velocidad angular deberá ser: 1 2π = 2π · = 2π · f ω= T T Del lado de las unidades, la velocidad angular se expresará en unidades de ángulo sobre unidades de tiempo, en este caso entonces, las unidades de ω serán rad , pero recordando s que los radianes son una unidad ficticia, es posible no escribirla, de manera que la unidad de ω también puede escribirse como 1s . Si esto resulta un poco confuso, conviene releer las secciones de velocidad, perı́odo y frecuencia. Básicamente, la velocidad nos dice cuánta distancia se recorre por unidad de tiempo mientras que la velocidad angular nos dice qué cantidad de vueltas se completan por unidad de tiempo midiendo una vuelta completa como 2π. Por otro lado, y gracias a la relación entre ángulo en radianes, radio y arco se puede sacar la relación entre velocidad angular y velocidad. Volviendo a ver la definición de la velocidad: 2π 2πr = ·r T T v =ω·r v= Aceleración Centrı́peta (ac ) Por último en nuestro análisis cinemático del MCU, resta hablar de la aceleración. Anteriormente mencionamos que en un MCU la velocidad cambia todo el tiempo, no de valor (o módulo), pero si de dirección. Siempre que haya un cambio en la velocidad, sin importar de que tipo sea, habrá aceleración. Anteriormente, en MRUV analizamos aceleraciones que estában en la misma dirección que la velocidad (los objetos se movı́an hacia adelante o atrás y también aceleraban hacia delante o atrás (o arriba y abajo, etc.). De estas experiencias se puede deducir que el efecto de una aceleración paralela (en la misma dirección) a la velocidad es cambiar el módulo (valor) de la velocidad pero no su dirección. De manera opuesta, el efecto de una aceleración perpendicular a la velocidad es cambiar su dirección sin alterar su módulo (o valor). Si esto es cierto (prometemos que ası́ lo es), entonces un MCU solo puede tener aceleraciones que sean siempre perpendiculares a la velocidad, ya que esta sólo cambia su dirección y nunca su valor. En una trayectoria circular entonces, la aceleración será siempre perpendicular a la trayectoria, lo que quiere decir que apuntará hacia el centro del cı́rculo, por esto, recibe el nombre de aceleración centrı́peta (que apunta al centro) (ac ). En un MCU, para la aceleración centrı́peta siempre se cumple que: ac = v2 = ω2r r 5 1 de Abril Por ejemplo, para el caso de la Tierra orbitando alrededor del Sol, veamos un esquema de velocidades y aceleraciones para distintos momentos del año. v ac e M a yo ( 1d fer i a do !) ¡ v ac v ac Sol 1 de Enero ac 1d gos eA ac to v v 1 de Octubre Velocidad y aceleración centrı́peta de la Tierra en distintos momentos del año 6 Dinámica del MCU Del análisis cinemático se llega a la conclusión de que en el MCU, a todo momento, debe haber una aceleración centrı́peta (que apunta al centro de giro). La segunda ley de Newton (que dice que la suma de todas las fuerzas es igual a la masa por la aceleración) nos dice que, si hay aceleración, necesariamente habrá fuerza. También nos dice que la fuerza y la aceleración tendrán la misma dirección. Por lo tanto, si hay aceleración centrı́peta deberá haber también una fuerza centrı́peta (Fc ). Si el movimiento es MCU, la única aceleración es centrı́peta y por lo tanto la única fuerza también lo es. Esta fuerza no cambia el valor (módulo) de la velocidad sino únicamente su dirección (para mantenerlo en una trayectoria circular). Fc m Fuerza centrı́peta en una boleadora Combinando la segunda ley de Newton con la expresión de la aceleración centrı́peta vista más arriba se puede obtener la expresión de la fuerza centrı́peta: v2 = ω2r r FT = Fc = m · ac m · v2 Fc = = mω 2 r r Es importante recordar que la Fuerza se mide en Newton (N) y que 1N = 1kg sm2 . Si la velocidad no cambia, la energı́a cinética tampoco y por lo tanto el sistema tiene siempre la misma cantidad de energı́a mecánica. Observando la ecuación de la fuerza centrı́peta se pueden sacar algunas conclusiones importantes: si el radio de giro es fijo (por ejemplo, si se ata una pesa de un piolı́n de alguna longitud) entonces a mayor fuerza centrı́peta, mayor velocidad, es decrçir, mientras más fuerte tiremos de la pesa hacia el centro, más rápido esta girará (su velocidad, velocidad angular y frecuencia aumentarán, su perı́odo disminuirá y el radio de grio y la distancia recorrida por ciclo permanecerán constantes). Por otro lado, si la fuerza centrı́peta permanece constante y dejamos variar el radio de giro, entonces la velocidad, el perı́odo y la distancia recorrida aumentarán a medida que aumente el radio, pero la velocidad angular y la frecuencia disminuirán, es decir, si bien la masa se moverá más rápido, le tomará más tiempo completar el recorrido debido a que la distancia a recorrer será más grande aún. Siempre que tengamos una fuerza que actúe perpendicularmente a la velocidad y que cumpla con las condiciones impuestas por las ecuaciones, tendremos un MCU. Las fuerzas responsables de los MCU pueden ser varias: la tensión de un hilo, la tracción de un motor, y, como veremos a continuación, la fuerza de gravedad. ac = 7