Ramirez, Jose M - Universidad Tecnológica Nacional
Anuncio

MECÁNICA RACIONAL
DESARROLLO Y APLICACIÓN DE UN SOFTWARE EN MATLAB
PARA LA TRANSFORMACIÓN DEL TENSOR DE INERCIA POR
TRASLACIÓN Y ROTACIÓN DE EJES
Alumno: José M. Ramírez
Profesor Titular: Dr. Liberto Ercoli
Profesora Asociada: Ing. Virginia Azurmendi
Universidad Tecnológica Nacional Facultad Regional Bahía Blanca, Departamento de Ingeniería
Mecánica, Cátedra Mecánica Racional. 11 de Abril 461, B8000LMI Bahía Blanca, Argentina,
{ramirezjose, libercoli}@frbb.utn.edu.ar, http://www.frbb.utn.edu.ar
Palabras Claves: Mecánica racional, matlab, tensor de inercia.
Resumen. El presente trabajo tiene su origen como promoción de la asignatura Mecánica Racional.
Se efectúa una programación en un software denominado Matlab (del inglés, MATrix LABoratory)
para realizar la transformación de coordenadas del tensor de inercia. Su aplicación es inmediata a
problemas donde la geometría del mismo requiera algún tipo de transformación, ya sea vectorial o
tensorial. Así pues, se pretende establecer una herramienta para que el usuario pueda realizar
transformaciones del tensor de inercia en forma sencilla y eficiente. Con el objeto de chequear los
resultados del programa desarrollado, se presenta una aplicación al problema de promoción del
alumno Diego Ramborger, constatándose el arribo a los mismos resultados mediante aproximaciones
diferentes.
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
1
Mecánica Racional
Dr. Liberto Ercoli
INTRODUCCION
Matlab es un software, mundialmente reconocido, con un entorno interactivo basado en matrices
para la realización de cálculos numéricos y la visualización de los resultados, a diferencia de otros,
que se enfocan en el cálculo simbólico (como Mathemática, entre otros). También dispone de un
amplio rango de programas de apoyo denominado Toolbox, que aumenta significativamente las
funciones del programa principal.
Los vectores son comúnmente utilizados para la descripción de diversas entidades físicas, como
fuerzas, desplazamientos, etc. Sin embargo, los tensores son entidades matemáticas más complejas
que los vectores. Por ejemplo, las tensiones, deformaciones, inercia, etc., no pueden ser
representados por un vector, éstos son representados por tensores.
Para la aplicación a problemas dinámicos, resulta de utilidad el desarrollo de un programa
computacional que determine el tensor de inercia transformado (rotación o traslación), así pues,
evitando posibles errores y pérdida de tiempo debido al tedioso cálculo matemático. En el presente
trabajo se realiza un desarrollo completo de la programación para la transformación (Apéndice I),
como también la aplicación a un problema típico de dinámica de un cuerpo rígido.
2
BREVE DESCRIPCION DEL MODELO
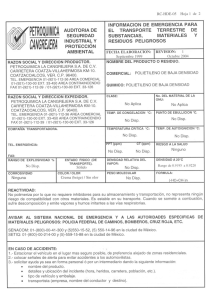
En la Fig.1, se puede observar el mecanismo a analizar. Consiste en un disco uniforme de masa
M, diámetro D y espesor e con una que gira con velocidad angular φɺ con respecto a un marco que
hace las veces de soporte, y a su vez éste gira con velocidad angular ψɺ entorno al eje vertical Z.
_.
f
_.
Y
b
z’’
L
y’’
z’
q
y’
O’=G
a
z
y
Figura 1. Modelo aplicado.
Valor numérico
D (mm)
e (mm)
θ (rad)
ɺ
φ (rad/seg)
ψɺ (rad/seg)
M (Kg)
L (mm)
0.150
0.0020
π/4
60
20
1
600
Tabla 1. Especificaciones geométricas.
2
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
3
Mecánica Racional
Dr. Liberto Ercoli
DESARROLLO TEORICO
3.1 Tensor de inercia
Momento de inercia es una importante propiedad del cuerpo que interviene en el análisis de
fuerzas de todo cuerpo que tenga aceleración de rotación entorno a un eje dado. Así como la masa
m de un cuerpo dado es la resistencia a la aceleración de traslación, el momento de inercia es una
medida de la resistencia de un cuerpo a ser acelerado en rotación. Las dimensiones de los
momentos de inercia son (Masa x Longitud 2 ) . Las expresiones de los momentos de inercia y los
productos de inercia, está dada por la ecuación (1).
3
Iij = ∫ βij ∑ xi2 − xi x j dm
(1)
i =1
1 i = j
βij =
(2)
0 i ≠ j
Las ecuaciones anteriores se pueden expresar en forma matricial y recibe el nombre de tensor de
inercia como se indica en la ecuación (3). Los valores o elementos de la matriz dependen del origen
(01) y de la orientación de los ejes.
I xx − I xy − I xz
I (01) = − I yx I yy − I yz
(3)
−I
zx − I zy I zz
Siendo:
Iij = I ji
(4)
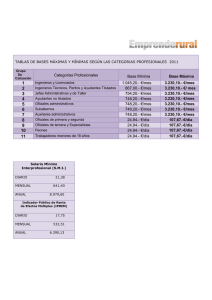
3.2 Expresión general del momento cinético
Se toma una terna solidaria con el cuerpo en un punto (01) del mismo, donde estarán aplicados
los vectores V 01 y ω .
(5)
V i = V 01 + V ri = V 01 + ω × r i
z
_
Mvi
_
Ww
z’
Mmi
zi’ _
RrG
G
y’
xi’
_
Mv01
M01
yi’
y
x’
x
Figura 2.
N
N
K (01) = ∑ r i ×mi iV 01 + ∑ mi i r i × ω × r i
1
1
(
)
(6)
El primer sumando, resulta:
(
r G × miV 01
)
El segundo sumando, por fórmula de Gibbs, se obtiene:
3
(7)
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
N
K (01) = r G × miV 01 + ∑ mi i r i ir i ω − r i iω r i
1
(8)
r i i r i = ri 2 = xi′2 + yi′2 + zi′2
(9)
(
) (
)
Siendo:
Multiplicando por ω , y trabajando en forma matricial:
1 0 0 ω x′
2
2
2
2
ri iω = ( xi′ + yi′ + zi′ )i 0 1 0 i ω ′y = ri 2 i1iω
0 0 1 ω′
z
Ahora:
xi′xi′ xi′ yi′ xi′zi′ ω ′x
′ ′
′ ′
′ ′ ′
yi xi yi yi yi zi i ω y = X iω
z ′ x′ z ′ y ′ z ′ z ′ ω ′
i i
i i z
i i
Luego, introduciendo las ecuaciones (10) y (11) en (8), resulta:
N
(
)
K (01) = r G × miV 01 + ∑ mi i ri 2 i1 − X ω
1
Operando el segundo término del segundo miembro, se obtiene:
I xx − I xy − I xz
2
mi i ri i1 − X = − I yx I yy − I yz
−I
zx − I zy I zz
(
)
(10)
(11)
(12)
(13)
La ecuación (13), representa el tensor de inercia referido a (01). Entonces, la ecuación (12) resulta:
(14)
K (01) = r G × miV 01 + I (01) iω
Si bien la ecuación (14) es genérica, resulta mas sencillo la determinación del momento cinético
respecto de G, para luego conocer el K (01) .
K (01) = K ( G ) + r G × Q
Q = miV01
(15)
K ( G ) = I G iω
(17)
(16)
3.3 Expresión general de la ecuación de Newton
Para una partícula Pi de un sistema libre, se tiene:
dV i
(18)
dt
F li y F Ei son las fuerzas interiores y exteriores respectivamente que actúan sobre la partícula.
Para un sólido, F li = 0 (por cuanto éstas actúan de a pares, con el mismo módulo, colineales y
opuestas):
F li + F Ei = mi
N
∑F
Ei
= FE
(19)
dQ
dt
(20)
1
Luego:
FE =
4
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
Como:
Q = mVG
(21)
Si F E = 0 resulta V G = 0 , lo que indica que el movimiento del centroide no puede variar si no
actúan sobre el sistema fuerzas exteriores. Ahora, si te toma una terna en movimiento:
(22)
Q = Q ɵi1 + Q ɵj + Q ɵ
k1
x
y
1
z
Derivando con respecto al tiempo, se tiene:
dQ dQx ɵ dQy ɵ dQz ɵ
diɵ1
dɵ
k1
d ɵj
=
i1 +
j1 +
k 1 + Qx
+ Qy 1 + Qz
dx dt
dt
dt dt
dt
dx
1
(23)
2
El término (1) del segundo miembro expresa la variación de Q respecto de la terna móvil como si
ésta estuviese detenida. El término (2) del segundo miembro puede expresarse de la siguiente
manera, ω × Q . Por lo tanto:
dQ
FE =
(24)
+ω ×Q
dt rel
Siendo ω la velocidad angular de la terna (impresa a ella) móvil. Esta es la expresión de la
ecuación de Newton para sistema de referencia en movimiento.
3.4 Expresión general de la ecuación de Euler
La expresión de del momento cinético esta dada por la ecuación (25):
N
K (01) = ∑ r i ×mi iV i
(25)
1
Derivando con respecto al tiempo y reordenando la ecuación (25), se obtiene:
N
d K (01)
dV i
= −V (01) × Q + ∑ r i ×mi i
dt
dt
1
N
N
dV i
r
×
F
+
r
×
F
=
i
Ei
i
li
∑1
∑1
∑1 r i ×mi dt
(26)
N
1
(27)
2
Siendo (1) y (2) de la ecuación (24), M E (01) y M l (01) . M E (01) es el momento de las fuerzas
exteriores, y M E (01) es el momento de las fuerzas interiores, siendo éste nulo en un rígido por
actuar de a pares y contrarias. Reemplazando (27) en (26), se obtiene:
d K (01)
(28)
M E (01) =
+ V (01) × Q
dt
Si la terna respecto de la cual está referido K (01) no es inercial, se tendrá:
(29)
K (01) = K xɵi1 + K y ɵj1 + K z ɵ
k1
d ɵj
d K (01) dK x ɵ dK y ɵ dK z ɵ
diɵ1
dɵ
k1
=
i1 +
j1 +
k1 + K x
+ Ky 1 + Kz
dt
dt
dt
dt dt
dt
dx
1
(30)
2
El término (1) del segundo miembro expresa la variación de K respecto de la terna móvil como si
ésta estuviese detenida. El término (2) del segundo miembro puede expresarse de la siguiente
manera, ω × K (01) . Por lo tanto:
5
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
d K 01
M E (01) =
(31)
+ ω × K (01) + V 01 × Q
dt rel
Siendo ω la velocidad angular de la terna (impresa a ella) móvil. Esta es la expresión de la
ecuación de Euler para un sistema de referencia en movimiento.
3.5 Descripción general de la transformación del tensor de inercia
Las magnitudes tensoriales tienen tantas componentes como 3n , donde n es el orden del tensor.
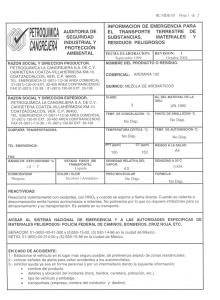
3.6 Transformación por rotación de ejes
Las expresiones para realizar la transformación por rotación de ejes están dadas por las
ecuaciones (31) y (32).
(31)
T ′ = R ⋅ T ⋅ RT
tij′ = cim ⋅ c jn ⋅ tmn
(32)
Donde los c resultan ser los cosenos directores entre el eje original y rotado. La ecuación (32) es
la denominada notación de Einstein. Siendo cij = Cos[θij ] , (i, j = 1, 2,3) y m × n = 3 × 3 (Si el
tensor es de 2do orden). Expresando la ecuación (32) en forma matricial:
′ t13
′
t11′ t12
t′ t′ t′
21 22 23
t ′ t′ t′
31 32 33
En la Fig.3, se puede observar gráficamente lo dicho anteriormente.
(33)
z
z1’
y1’
y
a13
a12
a11
x
x1’
Figura 3.
3.7 Transformación por traslación de ejes
También es importante destacar las expresiones para realizar la transformación por traslación de
ejes. Para realizarlo se recurre al teorema de Steiner.
I x′x′ = I xxG + m ⋅ ( d y2 + d z2 )
(34a)
I y ′y′ = I yyG + m ⋅ ( d x2 + d z2 )
2
x
2
y
(34b)
I z′z′ = I zzG + m ⋅ ( d + d )
(34c)
I x′y′ = I xyG + m ⋅ (d x ⋅ d y )
(34d)
I x′z ′ = I xzG + m ⋅ ( d x ⋅ d z )
I y ′z′ = I yzG + m ⋅ ( d y ⋅ d z )
(34e)
Donde:
6
(34f)
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
n
m = ∑ mi
(35)
1
Siendo d, las distancias correspondientes entre los ejes ( x, y, z ) y ( x′, y′, z ′) .
z
z’
dz
y’
dy
dx
x’
G
y
x
Figura 4.
3.8 Elipsoide de inercia
La geometría del elipsoide de inercia define por completo las propiedades inerciales del cuerpo
respecto un punto O. En general, a cada punto del cuerpo irá asociado un elipsoide de inercia
diferente. Como el elipsoide tiene tres ejes de simetría, será posible orientar las direcciones de
coordenadas de manera que coincidan con dichos ejes. Los momentos de inercia respecto a estos
ejes se denominan momentos principales de inercia I1 , I 2 , I3 , y los ejes se llaman, ejes principales
de inercia. En ésta orientación (principal), los productos de inercia se anulan, y la ecuación de la
cuádrica se expresa como se observa en la ec. (36). La determinación de los momentos principales
de inercia, se realiza mediante la obtención de las raíces o autovalores de la ecuación cúbica.
1 = I1 ⋅ x 2 + I 2 ⋅ y 2 + I 3 ⋅ z 2
(36)
O bien:
x2 y 2 z 2
1= 2 + 2 + 2
(37)
q1 q2 q3
Siendo:
1
1
1
q1 =
; q2 =
; q3 =
(38)
I1
I2
I3
La ecuación (38), son los valores que dan las longitudes de los semiejes, menor, medio y mayor
del elipsoide. El tensor principal de inercia toma la siguiente forma:
0
I11 0
0 I
0
(39)
22
0
0 I 33
3.9 Expresión general de la energía cinética
La expresión de la energía cinética para un movimiento rototraslatorio está dada por la ec. (44):
2
1 N
e = ∑ mi iV i
(40)
2 1
Tomando como centro de reducción (01) y aplicando a la ecuación (40) la ley de distribución de
velocidades.
2
1 N
e = ∑ mi i V 01 + ω × r i
(40)
2 1
(
)
7
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
2
1 N
1 N
1 N
m
i
V
+
m
ω
×
r
+
i
01
∑ i
∑ i
∑ mi i2V 01 i ω × r i
2 1
2 1
2 1
N
N
2
1 N
1
e = ∑ mi iV 01 + ω 2 ∑ mi ω × r i + V 01 iω × ∑ mi i r i
2 1
2
1
1
(
e=
)
(
(
)
)
(41)
(42)
1
En el término (1), se ha multiplicado el numerador y denominador por ω 2 . La expresión
2
mi ( ω × ri ) es el momento de inercia de la masa mi respecto del vector ω̂ , entonces:
N
∑ m (ω × r )
i
i
2
= Iωω
(43)
1
La ecuación (43) resulta ser el momento de inercia del sólido respecto de del eje ω̂ que pasa por
(01). La expresión genérica de la energía cinética para un sólido esta dada por la ecuación (44):
1
1
e = mi iV012 + Iωω 01 iω 2 + m
iV 01 iω × r
G
(44)
2
2
3
1
2
Siendo, la expresión (1) la energía cinética correspondiente a traslación, la expresión (2) es la
energía cinética de un rígido correspondiente a la rotación y la expresión (3) es la correspondiente a
la fuerza viva compuesta.
4
DESCRIPCION DEL SOFTWARE
A continuación se realiza una breve descripción del software implementado al modelo de
estudio de la Fig. 1 para realizar las transformaciones del tensor.
En primer lugar, al iniciar el programa se muestra en la pantalla una lista de sólidos
homogéneos (la orientación de los ejes se pueden observar en el Apéndice III) donde el usuario
puede elegir las diversas opciones como indica la numeración.
**********************************************************************************************
=============== TRANSFORMACION POR ROTACION Y TRASLACION======================
**********************************************************************************************
**********************************************************************************************
======================= Programado por Jose M. Ramirez ==========================
**********************************************************************************************
···································································································
··········································· I N P U T ·······································
···································································································
··
1 - DISCO CIRCULAR MACIZO
··
2 - PLACA RECTANGULAR DELGADA
··
3 - ESFERA
··
4 - HEMISFERIO
··
5 - CILINDRO
··
6 - BLOQUE RECTANGULAR
··
7 - BARRA
··
8 - ANILLO
··
9 - CONO
··
10 - SEMICILINDRO
···································································································
Elemento:1 (Continua…)
En el caso de estudio se elige el sólido número 1 (disco circular macizo), como se observa
en la Fig. 6.
8
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
z
R
G
e
y
x
Figura 6. Disco circular macizo.
Según la elección del sólido homogéneo, se pide a continuación una serie de aspectos
geométricos, como el radio, longitudes, alturas, etc.
Masa[kg]=1
Radio[m]=0.075
Espesor[m]=0.0020 (Continua…)
Una vez introducido los datos, el software brinda una salida con el tensor de inercia
orientado en la dirección del centroide (Apéndice II, Apéndice III).
A continuación se indica mediante un menú, la transformación que se desea realizar. En el
modelo de estudio se necesita una transformación por rotación.
···········································································································
·· SELECCIONE LA TRANSFORMACION QUE DESEA REALIZAR ··
··········································································································
··
1 - ROTACION
··
2 - ROTACION + TRASLACION
··
3 - TRASLACION
··
0 - NINGUNO
·····················································
Seleccione opcion:1 (Continua…)
Para realizar la transformación elegida, se tiene que especificar los ángulos de rotación
como se indica a continuación.
=====================================================
=============== A N G U L O S D E R O T A C I O N ===============
=====================================================
Nota: 1)Sistema Original:(x,y,z)=(1,2,3)
2)Sistema Rotado:(x´,y´,z´)=(1p,2p,3p)
Importante: Ingresar matriz como se indica a continuación
======================================================
Matriz=[Angulo 1p - 1, Angulo 1p - 2, Angulo 1p - 3;
Angulo 2p - 1, Angulo 2p - 2, Angulo 2p - 3;
Angulo 3p - 1, Angulo 3p - 2, Angulo 3p - 3]=
====================================================== (Continua…)
Así pues, introduciendo los parámetros necesarios para la transformación, el software
brinda una serie de salidas (Apéndice II) indicando los cosenos directores, el tensor de inercia
rotado y el tensor principal de inercia.
Para finalizar, el usuario dispone de la elección de realizar la gráfica del elipsoide de inercia
indicando así los valores de las longitudes de los ejes menor, mediano y mayor.
·····················································
¿Graficar elipsoide de inercia? [s]i - [n]o:s
·····················································
·····················································
¿Correr nuevamente el programa? [s]i - [n]o:
9
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
5
Mecánica Racional
Dr. Liberto Ercoli
APLICACIÓN AL MODELO DE ESTUDIO
5.1 Energía cinética
Para determinar la energía cinética del disco como se muestra en la Fig. 1, se utiliza la ecuación
(44). Tomando como punto de reducción 01=G.
La velocidad en el punto de reducción G:
i
(45)
V (G ) = ψ × r G
i
ɵ′ , entonces:
Con r G = 0 y ψ = 20k
(46)
V (G) = 0
Como la velocidad en G es nula, entonces los términos (1) y (3) de la ecuación (44) se anulan, así la
energía cinética total:
1
e = IωωG iω 2
(47)
2
Ahora, ω T es la resultante de todas las rotaciones que afectan al sistema y será la misma cualquiera
sea el centro de reducción tomado, por esa razón se la denomina invariante vectorial.
ωT = −φɺ sin [θ ] ˆj′ + ψɺ + φɺ cos [θ ] kˆ′
(48)
(
)
(
)
_
Ww
_.
Y
_.
f
z’
q
y’
Figura 6. Vector rotación.
Siendo, I ωωG el momento de inercia del sólido respecto de del eje ωˆT que pasa por (G).
I ωωG = Cω2 x′ I11R′ + Cω2 y′ I 22R ′ + Cω2 z ′ I 33R ′ − 2Cω x′Cω y ′ I12R ′ − 2Cω y′Cω z ′ I 23R ′ − 2Cω x′Cω z ′ I13R ′
Con:
Cω x′ = cos [ 90 ] = 0
(49)
Cω y′ = cos [θ1 ] = cos [ 55.8] = 0.56
(51)
Cω z ′ = cos [90 − θ1 ] = cos [ 34.2] = 0.827
(52)
(50)
R
Los I ij ′ , son los momentos de inercia del disco rotado un ángulo θ = π / 4 . A continuación se
determina mediante un software realizado en Matlab el tensor de inercia rotado (Apéndice II), es
decir referido a la terna ( x′, y′, z ′) . En las ecuaciones (52) y (53) se muestran los tensores de inercia
NR
R
sin rotar I ij′ , es decir orientado en la dirección del eje del disco, y el tensor de inercia rotado I ij ′
respectivamente.
10
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
NR
I
1 2
1
2
2 mR + 2 me
=
0
0
Mecánica Racional
Dr. Liberto Ercoli
0
0
0.0014
1
1 2
2
mR + me
0 = 0
0.0014
0
2
2
0
0.0028
0
1
2
0
mR
2
0
0
0.0014
R
0.0021 −0.0007
I = 0
0
0
0.0021
0
0
(52)
(53)
Así pues:
I ωωG = 2.74 E − 3kg ⋅ m2
Entonces, la energía cinética total es:
kg ⋅ m2
e = 7.8
seg 2
(54)
(55)
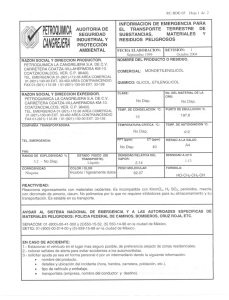
5.2 Elipsoide de inercia
Para la determinación de la gráfica del elipsoide de inercia se realiza mediante la programación
en Matlab ya mencionado anteriormente (Apéndice I).
El tensor de inercia expresado en el sistema ( x′′, y′′, z ′′) esta dado por la ecuación (52). Al
realizar la respectiva transformación por rotación queda expresado mediante la ecuación (53).
Ahora, el tensor principal de inercia es:
0
0
0.0014
P
I = 0
0.0014
0
(56a)
0
0
0.0028
Tomando la ecuación (38), se puede expresar los valores que dan las longitudes de los semiejes,
menor, medio y mayor del elipsoide.
q1 = 26.66; q2 = 26.66; q3 = 18.86
(56b)
Elipsoide de Inercia
Z
10
0
−10
20
10
20
10
0
0
−10
−10
−20
−20
Y
X
Figura 7. Elipsoide de inercia.
11
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
5.3 Reacciones estáticas y dinámicas
Para la determinación de la reacciones dinámicas se utilizan las ecuaciones de Newton (24) y
Euler (31). Tomando como centro de reducción al punto 01= (G). Siendo el vector ω :ψɺ ,
dQ
FE =
(57a)
+ω ×Q
dt rel
d KG
M E(G) =
(57b)
+ ω × K (G ) + V G × Q
dt rel
En la ecuación (46) se observa que la velocidad en el punto de reducción es nula. En
consecuencia la cantidad de movimiento ecu. (21) se anula también en ese punto.
Q = mVG = 0
(58)
Como se aprecia en la ecuación (58), la cantidad de movimiento es nulo, entonces también lo
será la ecuación (57a).
(59)
ω ×Q = 0
dQ
(60)
=0
dt rel
(61)
FE = 0
Para la determinación de la ecuación (57b), se debe determinar en primer lugar el momento
cinético ecu. (15) en el punto de reducción anteriormente asignado.
(62)
K ( G ) = K (G ) + r G × Q
Como se observa en las ecuación (58) y por la ubicación del punto de reducción r G = 0 es:
(63)
rG × Q = 0
Ahora, para la determinación del primer término de la ecuación (62) se utiliza la siguiente
expresión:
R
(64)
K (G ) = I G iω T
R
Siendo, I G el tensor de inercia rotado ( θ = π / 4 ), como se observa en la ecuación (53) y ω T el
vector rotación correspondiente a la terna ( x′, y′, z ′) , ecu. (48).
ω T = −42.42 ˆj ′ + 62.42kˆ′
(65)
Entonces la expresión (64) queda:
K (G ) = −0.1327 ˆj ′ + 0.1607 kˆ′
ψɺ × K (G ) = 20kˆ′ × −0.1327 ˆj′ + 0.1607kˆ′ = 2.65iˆ′
(
)
Además, los términos restantes de la ecuación (57):
dKG
=0
dt rel
V G ×Q = 0
Así pues, el momento de las fuerzas exteriores respecto del punto de reducción (G):
M E ( G ) = 2.65iˆ′
12
(66)
(67)
(68)
(69)
(70)
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
_
Fby’
_
Fbz’
q
_
Fb
b
z’’
y’’
z’
q
_
Fay’
y’
O’=G
_
Faz’
_
Me
q _
Fa
a
Figura 8. Reacciones dinámicas en los extremos del eje.
(
) (
)
r × F = ( −0.3cos [θ ] ˆj ′ + 0.3sin [θ ] kˆ′ ) × ( F cos [θ ] ˆj ′ + F sin [θ ] kˆ′ ) = −0.30 F iˆ′
ra × Fa = 0.3cos [θ ] ˆj ′ − 0.3sin [θ ] kˆ′ × Fa cos [θ ] ˆj ′ + Fa sin [θ ] kˆ′ = 0.30 Faiˆ′
b
b
b
b
b
(71)
(72)
Siendo, Fa y Fb las reacciones dinámicas resultantes como se puede apreciar en la Fig.8.
Igualando las ecuaciones (70) y (71), y las ecuaciones (70) y (72) se puede determinar las
reacciones dinámicas en los puntos (a) y (b) respectivamente.
0.30 Faiˆ′ = 2.65iˆ′ ⇒ Fa = 8.86 N
(73)
(74)
0.30 F iˆ′ = 2.65iˆ′ ⇒ F = 8.86 N
b
b
Entonces los vectores de las reacciones dinámicas:
Fa = −6.26 ˆj′ − 6.26 kˆ′
F = 6.26 ˆj′ + 6.26kˆ′
(75)
(76)
A continuación se determina las reacciones estáticas en los puntos (a) y (b). Para esto, se
dispone de otra orientación de ejes ( x′′, y′′, z ′′) como se observa en la Fig. 9. En resumen, se
b
determina las reacciones estáticas FaE,b en los puntos (a) y (b) en el sistema ( x′′, y′′, z ′′) , y luego se
realiza una transformación por rotación del vector ( θ = π / 4 ) para expresarlo en el sistema
( x′, y ′, z ′) . Así, se puede determinar las
reacciones totales en los apoyos.
_
E’
F by’
_
E’
F b
q
_
E’
F bz’
b
_
E
F by’’
z’’
q
_
FEbz’’
_
FEb
z’
y’’
q
y’
O’=G
_
E’
F az’
_
mg
_
E’
F ay’
q
_
E’
F a
a
_
E
F ay’’
Figura 9. Reacciones estáticas en los extremos del eje.
13
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
Entonces, planteando el equilibrio estático:
E
∑ F = F E ˆj′′ + F E ˆj′′ − mg sin [θ ] ˆj′′ + F E kˆ′′ − mg cos [θ ] kˆ′′ = 0
b
a
b
L
= FbE ˆj′′i L − mg cos [θ ] ˆj ′′i = 0
2
Reemplazando por sus correspondientes valores, indicados en la Tabla 1.
FaE = 3.47 ˆj ′′
F E = 3.47 ˆj′′ + 6.94kˆ′′
∑M
E
a
(77)
(78)
(79)
(80)
Ahora, realizando la transformación por rotación para un vector, se obtiene las reacciones
′
estáticas FaE,b en los puntos (a) y (b) para un sistema ( x′, y′, z ′) .
b
FaE′ = 2.44 ˆj′ + 2.44kˆ′
F E′ = −2.46 ˆj′ + 7.34 kˆ′
b
(81)
(82)
Por lo tanto, las reacciones totales en los puntos (a) y (b) en el sistema ( x′, y ′, z ′) :
F T = F E′ + F = −6.26 ˆj ′ − 6.26kˆ′ + 2.44 ˆj ′ + 2.44kˆ′ = −3.82 ˆj ′ − 3.82kˆ′
(83)
FbT = FbE′ + Fb = Fb = 6.26 ˆj ′ + 6.26kˆ′ − 2.46 ˆj ′ + 7.34kˆ′ = 3.8 ˆj ′ + 13.6 kˆ′
(84)
a
a
a
REFERENCIAS
L. Ercoli., Monografía de cátedra Mecánica Racional, 2005.
Meriam, J. L., Dinámica, segunda edición. Reverté, 1980.
MATLAB., MATLAB 7 Programming Fundamentals, 2009.
6
APENDICE I
A continuación se aprecia el descriptor del programa realizado en Matlab.
clc
clear all
disp('****************************************************************************')
disp('=================
TRANSFORMACION
POR
ROTACION
Y
TRASLACION
=================')
disp('****************************************************************************')
%==================================================%
%
DATOS
%==================================================%
disp('****************************************************************************')
disp('====================== Programado por Jose M. Ramirez ======================')
disp('****************************************************************************')
disp('
')
disp('·····················································')
disp('····················· I N P U T ·····················')
disp('·····················································')
disp('··
1 - DISCO CIRCULAR MACIZO
··')
disp('··
2 - PLACA RECTANGULAR DELGADA
··')
disp('··
3 - ESFERA
··')
disp('··
4 - HEMISFERIO
··')
disp('··
5 - CILINDRO
··')
disp('··
6 - BLOQUE RECTANGULAR
··')
disp('··
7 - BARRA
··')
disp('··
8 - ANILLO
··')
disp('··
9 - CONO
··')
disp('··
10 - SEMICILINDRO
··')
disp('·····················································')
%disp('·····················································')
14
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
%dis('??????????????????????????????????????????????????????')
%disp('|||||||||||||||||||||||||||||||||||||||||||||||||||||')
%disp('°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°°')
%disp('¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤¤')
%disp('«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»«»')
%disp('<><><><><><><><><><><><><><><><><><><><><><><><><><><>')
disp('·····················································')
elm=10;
AA = input('Elemento:');
if AA~=1:1:elm
disp('Lo siento, seleccione otro elemento')
else
m = input('Masa[kg]=');
%end
R = input('Radio[m]=');
h = input('espesor[m]=');
disp('·····················································')
%==================================================%
%
TENSOR DE INERCIA ( Sin rotar)
%==================================================%
% Para un disco circular macizo
II=zeros(3,3);
I(1,1)=1/4*m*R^2+1/12*m*h^2;
I(2,2)=1/4*m*R^2+1/12*m*h^2;
I(3,3)=1/2*m*R^2;
I(1,2)=0;
I(2,1)=0;
I(1,3)=0;
I(3,1)=0;
I(3,2)=0;
I(2,3)=0;
for i=0:2
for j=0:2
ii=i+1;
jj=1+j;
I(ii,jj)=[I(ii,jj)];
end
end
elseif AA==2
% Para una placa rectangular delgada
a = input('Longitud a(m)=');
b = input('Longitud b(m)=');
disp('·····················································')
I(1,1)=1/12*m*b^2;
I(2,2)=1/12*m*a^2;
I(3,3)=1/12*m*(a^2+b^2);
I(1,2)=0;
I(2,1)=0;
I(1,3)=0;
I(3,1)=0;
I(3,2)=0;
I(2,3)=0;
for i=0:2
for j=0:2
ii=i+1;
jj=1+j;
I(ii,jj)=[I(ii,jj)];
end
end
15
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
elseif AA==3
% Para una esfera
R = input('Radio[m]=');
disp('·····················································')
I(1,1)=2/5*m*R^2;
I(2,2)=2/5*m*R^2;
I(3,3)=2/5*m*R^2;
I(1,2)=0;
I(2,1)=0;
I(1,3)=0;
I(3,1)=0;
I(3,2)=0;
I(2,3)=0;
for i=0:2
for j=0:2
ii=i+1;
jj=1+j;
I(ii,jj)=[I(ii,jj)];
end
end
elseif AA==4
% Para un hemisferio
R = input('Radio[m]=');
disp('·····················································')
I(1,1)=0.259*m*R^2;
I(2,2)=0.259*m*R^2;
I(3,3)=2/5*m*R^2;
I(1,2)=0;
I(2,1)=0;
I(1,3)=0;
I(3,1)=0;
I(3,2)=0;
I(2,3)=0;
for i=0:2
for j=0:2
ii=i+1;
jj=1+j;
I(ii,jj)=[I(ii,jj)];
end
end
elseif AA==5
% Para un cilindro
R = input('Radio[m]=');
h = input('Longitud h(m)=');
disp('·····················································')
I(1,1)=1/12*m*(3*R^2+h^2);
I(2,2)=1/12*m*(3*R^2+h^2);
I(3,3)=1/2*m*R^2;
I(1,2)=0;
I(2,1)=0;
I(1,3)=0;
I(3,1)=0;
I(3,2)=0;
I(2,3)=0;
for i=0:2
for j=0:2
ii=i+1;
jj=1+j;
16
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
I(ii,jj)=[I(ii,jj)];
end
end
elseif AA==6
% Para un bloque rectangular
a = input('Longitud a(m)=');
b = input('Longitud b(m)=');
h = input('Longitud h(m)=');
disp('·····················································')
I(1,1)=1/12*m*(b^2+h^2);
I(2,2)=1/12*m*(a^2+h^2);
I(3,3)=1/12*m*(a^2+b^2);
I(1,2)=0;
I(2,1)=0;
I(1,3)=0;
I(3,1)=0;
I(3,2)=0;
I(2,3)=0;
for i=0:2
for j=0:2
ii=i+1;
jj=1+j;
I(ii,jj)=[I(ii,jj)];
end
end
elseif AA==7
% Para una barra
L = input('Longitud L(m)=');
R = input('Radio[m]=');
disp('·····················································')
I(1,1)=1/12*m*L^2+1/4*m*R^2;
I(2,2)=1/12*m*L^2+1/4*m*R^2;
I(3,3)=1/2*m*R^2;
I(1,2)=0;
I(2,1)=0;
I(1,3)=0;
I(3,1)=0;
I(3,2)=0;
I(2,3)=0;
for i=0:2
for j=0:2
ii=i+1;
jj=1+j;
I(ii,jj)=[I(ii,jj)];
end
end
elseif AA==8
% Para un anillo delgado
R = input('Radio[m]=');
disp('·····················································')
I(1,1)=1/2*m*R^2;
I(2,2)=1/2*m*R^2;
I(3,3)=m*R^2;
I(1,2)=0;
I(2,1)=0;
I(1,3)=0;
I(3,1)=0;
I(3,2)=0;
17
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
I(2,3)=0;
for i=0:2
for j=0:2
ii=i+1;
jj=1+j;
I(ii,jj)=[I(ii,jj)];
end
end
elseif AA==9
% Para un cono
R = input('Radio[m]=');
h = input('Longitud h(m)=');
disp('·····················································')
I(1,1)=3/80*m*(4*R^2+h^2);
I(2,2)=3/80*m*(4*R^2+h^2);
I(3,3)=3/10*m*R^2;
I(1,2)=0;
I(2,1)=0;
I(1,3)=0;
I(3,1)=0;
I(3,2)=0;
I(2,3)=0;
for i=0:2
for j=0:2
ii=i+1;
jj=1+j;
I(ii,jj)=[I(ii,jj)];
end
end
elseif AA==10
% Para un semicilindro
R = input('Radio[m]=');
h = input('Longitud h(m)=');
disp('·····················································')
I(1,1)=0.0669*m*R^2+m/12*h^2;
I(2,2)=0.320*m*R^2;
I(3,3)=1/12*m*(3*R^2+h^2);
I(1,2)=0;
I(2,1)=0;
I(1,3)=0;
I(3,1)=0;
I(3,2)=0;
I(2,3)=0;
for i=0:2
for j=0:2
ii=i+1;
jj=1+j;
I(ii,jj)=[I(ii,jj)];
end
end
end
disp('=====================================================')
disp('========== T E N S O R D E I N E R C I A ==========')
disp('=====================================================')
TensorI=I
end
%==================================================%
%
TENSOR DE INERCIA (rotado)
%==================================================%
18
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
disp('
')
disp('·····················································')
disp('·· SELECCIONE LA TRANSFORMACION QUE DESEA REALIZAR ··')
disp('·····················································')
disp('··
1 - ROTACION
··')
disp('··
2 - ROTACION + TRASLACION
··')
disp('··
3 - TRASLACION
··')
disp('··
0 - NINGUNO
··')
disp('·····················································')
Trans = input('Seleccione opcion:');
disp('·····················································')
disp('
')
if Trans==1
if AA~=1:1:elm
disp('')
else
disp('=====================================================')
disp('======== A N G U L O S D E R O T A C I O N ========')
disp('=====================================================')
disp('
')
disp('Nota: 1)Sistema Original:(x,y,z)=(1,2,3)')
disp('
2)Sistema Rotado:(x´,y´,z´)=(1p,2p,3p)')
disp('Importante: Ingresar matriz como se indica a continuacion')
disp('
')
disp('======================================================')
disp('Matriz=[Angulo 1p - 1, Angulo 1p - 2, Angulo 1p - 3;')
disp('
Angulo 2p - 1, Angulo 2p - 2, Angulo 2p - 3;')
disp('
Angulo 3p - 1, Angulo 3p - 2, Angulo 3p - 3]=')
disp('======================================================')
disp('
')
YY=input('Matriz=');
disp('
')
disp('=====================================================')
disp('======== C O S E N O S D I R E C T O R E S ========')
disp('=====================================================')
C1p1=cos(YY(1,1)*pi/180);
C1p2=cos(YY(1,2)*pi/180);
C1p3=cos(YY(1,3)*pi/180);
C2p1=cos(YY(2,1)*pi/180);
C2p2=cos(YY(2,2)*pi/180);
C2p3=cos(YY(2,3)*pi/180);
C3p1=cos(YY(3,1)*pi/180);
C3p2=cos(YY(3,2)*pi/180);
C3p3=cos(YY(3,3)*pi/180);
C(1,1)=C1p1;
C(1,2)=C1p2;
C(1,3)=C1p3;
C(2,1)=C2p1;
C(2,2)=C2p2;
C(2,3)=C2p3;
C(3,1)=C3p1;
C(3,2)=C3p2;
C(3,3)=C3p3;
CC=cc
disp('
%else
%disp('Revisar los angulos')
%return
%end
')
19
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
Ip(1,1)=C1p1^2*I(1,1)+C1p1*C1p2*I(1,2)+C1p1*C1p3*I(1,3)+...
C1p2*C1p1*I(2,1)+C1p2^2*I(2,2)+C1p2*C1p3*I(2,3)+...
C1p3*C1p1*I(3,1)+C1p3*C1p2*I(3,2)+C1p3^2*I(3,3);
Ip(1,2)=-(C1p1*C2p1*I(1,1)+C1p1*C2p2*I(1,2)+C1p1*C2p3*I(1,3)+...
C1p2*C2p1*I(2,1)+C1p2*C2p2*I(2,2)+C1p2*C2p3*I(2,3)+...
C1p3*C2p1*I(3,1)+C1p3*C2p2*I(3,2)+C1p3*C2p3*I(3,3));
Ip(2,1)=-(C1p1*C2p1*I(1,1)+C1p1*C2p2*I(1,2)+C1p1*C2p3*I(1,3)+...
C1p2*C2p1*I(2,1)+C1p2*C2p2*I(2,2)+C1p2*C2p3*I(2,3)+...
C1p3*C2p1*I(3,1)+C1p3*C2p2*I(3,2)+C1p3*C2p3*I(3,3));
Ip(1,3)=-(C1p1*C3p1*I(1,1)+C1p1*C3p2*I(1,2)+C1p1*C3p3*I(1,3)+...
C1p2*C3p1*I(2,1)+C1p2*C3p2*I(2,2)+C1p2*C3p3*I(2,3)+...
C1p3*C3p1*I(3,1)+C1p3*C3p2*I(3,2)+C1p3*C3p3*I(3,3));
Ip(3,1)=-(C1p1*C3p1*I(1,1)+C1p1*C3p2*I(1,2)+C1p1*C3p3*I(1,3)+...
C1p2*C3p1*I(2,1)+C1p2*C3p2*I(2,2)+C1p2*C3p3*I(2,3)+...
C1p3*C3p1*I(3,1)+C1p3*C3p2*I(3,2)+C1p3*C3p3*I(3,3));
Ip(2,2)=C2p1^2*I(1,1)+C2p1*C2p2*I(1,2)+C2p1*C2p3*I(1,3)+...
C2p2*C2p1*I(2,1)+C2p2^2*I(2,2)+C2p2*C2p3*I(2,3)+...
C2p3*C2p1*I(3,1)+C2p3*C2p2*I(3,2)+C2p3^2*I(3,3);
Ip(2,3)=-(C2p1*C3p1*I(1,1)+C2p1*C3p2*I(1,2)+C2p1*C3p3*I(1,3)+...
C2p2*C3p1*I(2,1)+C2p2*C3p2*I(2,2)+C2p2*C3p3*I(2,3)+...
C2p3*C3p1*I(3,1)+C2p3*C3p2*I(3,2)+C2p3*C3p3*I(3,3));
Ip(3,2)=-(C2p1*C3p1*I(1,1)+C2p1*C3p2*I(1,2)+C2p1*C3p3*I(1,3)+...
C2p2*C3p1*I(2,1)+C2p2*C3p2*I(2,2)+C2p2*C3p3*I(2,3)+...
C2p3*C3p1*I(3,1)+C2p3*C3p2*I(3,2)+C2p3*C3p3*I(3,3));
Ip(3,3)=C3p1^2*I(1,1)+C3p1*C3p2*I(1,2)+C3p1*C3p3*I(1,3)+...
C3p2*C3p1*I(2,1)+C3p2^2*I(2,2)+C3p2*C3p3*I(2,3)+...
C3p3*C3p1*I(3,1)+C3p3*C3p2*I(3,2)+C3p3^2*I(3,3);
ip=0;
jp=0;
for ip=0:2
for jp=0:2
iip=ip+1;
jjp=1+jp;
Ip(iip,jjp)=[Ip(iip,jjp)];
end
end
disp('******************************************************************')
disp('========== T E N S O R D E I N E R C I A R O T A D O ==========')
disp('******************************************************************')
TensorIp=Ip
disp('')
end
%===================================================================
=%
%
TENSOR DE INERCIA (rotado + traslacion)
%===================================================================
=%
elseif Trans==2
if AA~=1:1:elm
disp('')
else
disp('=====================================================')
disp('======== A N G U L O S D E R O T A C I O N ========')
disp('=====================================================')
disp('
')
disp('Nota: 1)Sistema Original:(x,y,z)=(1,2,3)')
disp('
2)Sistema Rotado:(x´,y´,z´)=(1p,2p,3p)')
disp('Importante: Ingresar matriz como se indica a continuacion')
20
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
disp('
')
disp('·····················································')
disp('Matriz=[Angulo 1p - 1, Angulo 1p - 2, Angulo 1p - 3;')
disp('
Angulo 2p - 1, Angulo 2p - 2, Angulo 2p - 3;')
disp('
Angulo 3p - 1, Angulo 3p - 2, Angulo 3p - 3]=')
disp('·····················································')
disp('
')
YY=input('Matriz=');
disp('
')
disp('=====================================================')
disp('======== C O S E N O S D I R E C T O R E S ========')
disp('=====================================================')
C(1,1)=C1p1;
C(1,2)=C1p2;
C(1,3)=C1p3;
C(2,1)=C2p1;
C(2,2)=C2p2;
C(2,3)=C2p3;
C(3,1)=C3p1;
C(3,2)=C3p2;
C(3,3)=C3p3;
for ci=0:2
for cj=0:2
cii=ci+1;
cjj=1+cj;
cc(cii,cjj)=[C(cii,cjj)];
end
end
CC=cc
%else
%disp('Revisar los angulos')
%return
%end
Ip(1,1)=C1p1^2*I(1,1)+C1p1*C1p2*I(1,2)+C1p1*C1p3*I(1,3)+...
C1p2*C1p1*I(2,1)+C1p2^2*I(2,2)+C1p2*C1p3*I(2,3)+...
C1p3*C1p1*I(3,1)+C1p3*C1p2*I(3,2)+C1p3^2*I(3,3);
Ip(1,2)=-(C1p1*C2p1*I(1,1)+C1p1*C2p2*I(1,2)+C1p1*C2p3*I(1,3)+...
C1p2*C2p1*I(2,1)+C1p2*C2p2*I(2,2)+C1p2*C2p3*I(2,3)+...
C1p3*C2p1*I(3,1)+C1p3*C2p2*I(3,2)+C1p3*C2p3*I(3,3));
Ip(2,1)=-(C1p1*C2p1*I(1,1)+C1p1*C2p2*I(1,2)+C1p1*C2p3*I(1,3)+...
C1p2*C2p1*I(2,1)+C1p2*C2p2*I(2,2)+C1p2*C2p3*I(2,3)+...
C1p3*C2p1*I(3,1)+C1p3*C2p2*I(3,2)+C1p3*C2p3*I(3,3));
Ip(1,3)=-(C1p1*C3p1*I(1,1)+C1p1*C3p2*I(1,2)+C1p1*C3p3*I(1,3)+...
C1p2*C3p1*I(2,1)+C1p2*C3p2*I(2,2)+C1p2*C3p3*I(2,3)+...
C1p3*C3p1*I(3,1)+C1p3*C3p2*I(3,2)+C1p3*C3p3*I(3,3));
Ip(3,1)=-(C1p1*C3p1*I(1,1)+C1p1*C3p2*I(1,2)+C1p1*C3p3*I(1,3)+...
C1p2*C3p1*I(2,1)+C1p2*C3p2*I(2,2)+C1p2*C3p3*I(2,3)+...
C1p3*C3p1*I(3,1)+C1p3*C3p2*I(3,2)+C1p3*C3p3*I(3,3));
Ip(2,2)=C2p1^2*I(1,1)+C2p1*C2p2*I(1,2)+C2p1*C2p3*I(1,3)+...
C2p2*C2p1*I(2,1)+C2p2^2*I(2,2)+C2p2*C2p3*I(2,3)+...
C2p3*C2p1*I(3,1)+C2p3*C2p2*I(3,2)+C2p3^2*I(3,3);
Ip(2,3)=-(C2p1*C3p1*I(1,1)+C2p1*C3p2*I(1,2)+C2p1*C3p3*I(1,3)+...
C2p2*C3p1*I(2,1)+C2p2*C3p2*I(2,2)+C2p2*C3p3*I(2,3)+...
C2p3*C3p1*I(3,1)+C2p3*C3p2*I(3,2)+C2p3*C3p3*I(3,3));
Ip(3,2)=-(C2p1*C3p1*I(1,1)+C2p1*C3p2*I(1,2)+C2p1*C3p3*I(1,3)+...
C2p2*C3p1*I(2,1)+C2p2*C3p2*I(2,2)+C2p2*C3p3*I(2,3)+...
C2p3*C3p1*I(3,1)+C2p3*C3p2*I(3,2)+C2p3*C3p3*I(3,3));
Ip(3,3)=C3p1^2*I(1,1)+C3p1*C3p2*I(1,2)+C3p1*C3p3*I(1,3)+...
C3p2*C3p1*I(2,1)+C3p2^2*I(2,2)+C3p2*C3p3*I(2,3)+...
21
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
C3p3*C3p1*I(3,1)+C3p3*C3p2*I(3,2)+C3p3^2*I(3,3);
ip0sr=0;
jp0sr=0;
for ip0sr=0:2
jjp0sr=1+jp0sr;
Ip0sr(iip0sr,jjp0sr)=[Ip0sr(iip0sr,jjp0sr)];
end
end
disp('=====================================================')
disp('== C O O R D E N A D A S D E T R A S L A C I O N ==')
disp('=====================================================')
disp('
')
disp('Nota: 1)Sistema Original:(x,y,z)=(1,2,3)')
disp('
2)Sistema Trasladado:(x´,y´,z´)=(1t,2t,3t)')
disp('
')
T1p1=input(' Coordenada 1p=');
T2p2=input(' Coordenada 2p=');
T3p3=input(' Coordenada 3p=');
disp('
')
Ip0(1,1)=Ip(1,1)+m*(T2p2^2+T3p3^2);
Ip0(1,2)=-(Ip(1,2)+m*T1p1*T2p2);
Ip0(2,1)=-(Ip(2,1)+m*T1p1*T2p2);
Ip0(1,3)=-(Ip(1,3)+m*T1p1*T3p3);
Ip0(3,1)=-(Ip(3,1)+m*T1p1*T3p3);
Ip0(2,2)=Ip(2,2)+m*(T1p1^2+T3p3^2);
Ip0(2,3)=-(Ip(2,3)+m*T2p2*T3p3);
Ip0(3,2)=-(Ip(3,2)+m*T2p2*T3p3);
Ip0(3,3)=Ip(3,3)+m*(T1p1^2+T2p2^2);
end
disp('****************************************************************************************')
disp('========== T E N S O R D E I N E R C I A R O T A D O + T R A S L A D A D O ==========')
disp('****************************************************************************************')
TensorIp0=Ip0
disp('')
end
%===================================================================
=%
%
TENSOR DE INERCIA (traslacion)
%===================================================================
=%
elseif Trans==3
if AA~=1:1:elm
disp('')
else
disp('=====================================================')
disp('== C O O R D E N A D A S D E T R A S L A C I O N ==')
disp('=====================================================')
disp('
')
disp('Nota: 1)Sistema Original:(x,y,z)=(1,2,3)')
disp('
2)Sistema Trasladado:(x´,y´,z´)=(1t,2t,3t)')
T1p1=input(' Coordenada 1p=');
T2p2=input(' Coordenada 2p=');
T3p3=input(' Coordenada 3p=');
Ip0sr(1,1)=I(1,1)+m*(T2p2^2+T3p3^2);
Ip0sr(1,2)=-(I(1,2)+m*T1p1*T2p2);
Ip0sr(2,1)=-(I(2,1)+m*T1p1*T2p2);
22
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
Ip0sr(1,3)=-(I(1,3)+m*T1p1*T3p3);
Ip0sr(3,1)=-(I(3,1)+m*T1p1*T3p3);
Ip0sr(2,2)=I(2,2)+m*(T1p1^2+T3p3^2);
Ip0sr(2,3)=-(I(2,3)+m*T2p2*T3p3);
Ip0sr(3,2)=-(I(3,2)+m*T2p2*T3p3);
Ip0sr(3,3)=I(3,3)+m*(T1p1^2+T2p2^2);
ip0sr=0;
jp0sr=0;
for ip0sr=0:2
Ip0sr(iip0sr,jjp0sr)=[Ip0sr(iip0sr,jjp0sr)];
end
end
disp('****************************************************************************************')
disp('================= T E N S O R D E I N E R C I A T R A S L A D A D O
=================')
disp('****************************************************************************************')
TensorIp0sr=Ip0sr
disp('')
end
end
%******************************************************************
%========================== G R A F I C A =========================
%******************************************************************
%ecuacion elipsoide
%x^2/a^2+y^2/b^2+z^2/c^2=1
if Trans~=1:1:3
disp('')
else
disp('')
%disp('****************************************************************************')
%disp('============= G R A F I C A E L I P S O I D E I N E R C I A ==============')
%disp('****************************************************************************')
%Rotacion
[yIp,LambIp]=eig(Ip);
Ipp=LambIp;
end
%Rotacion+Traslacion
elseif Trans==2
if AA~=1:1:elm
disp('')
else
Ip0;
[yIp0,LambIp0]=eig(Ip0);
Ipp=LambIp0;
end
%Traslacion
elseif Trans==3
if AA~=1:1:elm
disp('')
else
Ip0sr;
[yIp0sr,LambIp0sr]=eig(Ip0sr);
Ipp=LambIp0sr;
end
end
disp('===============================================================')
disp('======== T E N S O R P R I N C I P A L I N E R C I A ========')
disp('===============================================================')
23
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
IIpp=Ipp
disp('****************************************************************************')
disp('============= G R A F I C A E L I P S O I D E I N E R C I A ==============')
disp('****************************************************************************')
s=1;
n=0;
disp('
')
disp('·····················································')
gg=input('¿Graficar elipsoide de inercia? [s]i - [n]o:');
disp('·····················································')
ag=sqrt(1/Ipp(1,1));
bg=sqrt(1/Ipp(2,2));
cg=sqrt(1/Ipp(3,3));
[x, y, z] = ellipsoid(0,0,0,ag,bg,cg,35);
surfl(x, y, z)
title('Elipsoide de Inercia')
colormap (copper)
xlabel('X')
ylabel('Y')
zlabel('Z')
axis equal
end
else
disp('')
end
end
end
s=1;
disp('
')
disp('·····················································')
r=input(' ¿Correr nuevamente el programa? [s]i - [n]o: ');
disp('·····················································')
if r==s;
run TransT
else
close
end
7
APENDICE II
A continuación se muestra la salida del software realizado para la rotación del tensor de
inercia.
****************************************************************************
================= TRANSFORMACION POR ROTACION Y TRASLACION =================
****************************************************************************
****************************************************************************
====================== Programado por Jose M. Ramirez ======================
****************************************************************************
·····················································
····················· I N P U T ·····················
·····················································
··
1 - DISCO CIRCULAR MACIZO
··
··
2 - PLACA RECTANGULAR DELGADA
··
··
3 - ESFERA
··
··
4 - HEMISFERIO
··
··
5 - CILINDRO
··
··
6 - BLOQUE RECTANGULAR
··
··
7 - BARRA
··
··
8 - ANILLO
··
··
9 - CONO
··
··
10 - SEMICILINDRO
··
24
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
Mecánica Racional
Dr. Liberto Ercoli
·····················································
·····················································
Elemento:1
Masa[kg]=1
Radio[m]=0.075
espesor[m]=0.005
·····················································
=====================================================
========== T E N S O R D E I N E R C I A ==========
=====================================================
TensorI =
0.0014
0
0
0 0.0014
0
0
0 0.0028
·····················································
·· SELECCIONE LA TRANSFORMACION QUE DESEA REALIZAR ··
·····················································
··
1 - ROTACION
··
··
2 - ROTACION + TRASLACION
··
··
3 - TRASLACION
··
··
0 - NINGUNO
··
·····················································
Seleccione opcion:1
·····················································
=====================================================
======== A N G U L O S D E R O T A C I O N ========
=====================================================
Nota: 1)Sistema Original:(x,y,z)=(1,2,3)
2)Sistema Rotado:(x´,y´,z´)=(1p,2p,3p)
Importante: Ingresar matriz como se indica a continuacion
======================================================
Matriz=[Angulo 1p - 1, Angulo 1p - 2, Angulo 1p - 3;
Angulo 2p - 1, Angulo 2p - 2, Angulo 2p - 3;
Angulo 3p - 1, Angulo 3p - 2, Angulo 3p - 3]=
======================================================
Matriz=[0,90,90;90,45,45;90,135,45]
=====================================================
======== C O S E N O S D I R E C T O R E S ========
=====================================================
CC =
1.0000 0.0000 0.0000
0.0000 0.7071 0.7071
0.0000 -0.7071 0.7071
******************************************************************
========== T E N S O R D E I N E R C I A R O T A D O ==========
******************************************************************
TensorIp =
0.0014 -0.0000 -0.0000
-0.0000 0.0021 -0.0007
-0.0000 -0.0007 0.0021
===============================================================
======== T E N S O R P R I N C I P A L I N E R C I A ========
===============================================================
IIpp =
0.0014
0
0
0 0.0014
0
0
0 0.0028
25
UTN FRBB - Ing. Mecánica
Jose M. Ramírez
8
Mecánica Racional
Dr. Liberto Ercoli
APENDICE III
En las siguientes figuras (el orden es exactamente como aparece en las opciones del software)
se muestran los sólidos homogéneos con sus respectivas orientaciones.
z
z
b
a
e
R
G
y
y
G
x
x
Figura 10a. Disco macizo.
Figura 10b. Placa rectangular delgada.
Z
z
z
y
R
3R
8
x
y
G
G
x
Y
R
X
Figura 10c. Esfera.
Figura 10d. Hemisferio.
z
z
R
h
G
y
h
y
G
x
a
x
b
Figura 10e. Cilindro revolución.
Figura 10f. Bloque rectangular.
z
z
R
L
G
y
e
R
G
y
x
x
Figura 10g. Barra.
Figura 10h. Anillo.
z
z
h
G
R
3h
4
y
G
R
y
x
h
x
Figura 10i. Cono.
Figura 10j. Semicilindro.
26
4R
3p