V - Capítulo Español del IEEE PELS
Anuncio

Comportamiento en pequeña señal de las fuentes
conmutadas
Introducción
Estudio en pequeña señal de modelos promedio
Ejemplo de promediado del circuito
Ejemplo con Pspice
Variables de estado
Equivalente promedio de los elementos de conmutación
Modelado de convertidores en conducción discontinua
Paradoja del promedio
Orden reducido
Orden completo
Modelo continuo
Simulación
Reguladores lineales
Ejemplo de diseño
Conclusiones y comentarios finales
Referencias
Comportamiento en pequeña señal de las fuentes conmutadas
1/68
Julio 2007
Introducción (I)
- Los convertidores son conmutados porque el interruptor es el único elemento activo con
capacidad de regulación cuyo rendimiento teórico es 100%.
- La regulación mediante dispositivos que trabajan en conmutación hace que los sistemas
resultantes no sean LTI (lineales e invariantes en el tiempo).
- Sólo es posible utilizar el diagrama de bode en sistemas LTI.
- El tipo de regulación que vamos a considerar es PWM (modulación de ancho de pulso) con
frecuencia de conmutación constante, fs=1/T.
- El parámetro de control es el ciclo de trabajo, d.
- El ciclo de trabajo se obtiene a partir de una “señal de control”, vc.
- El ciclo de trabajo no se puede modificar dentro de un periodo de conmutación.
- El ciclo de trabajo resulta, por tanto, de muestrear vc con un periodo T.
Comportamiento en pequeña señal de las fuentes conmutadas
2/68
Julio 2007
Introducción (II)
iM
L
iL
iC
+
M
vg(t)
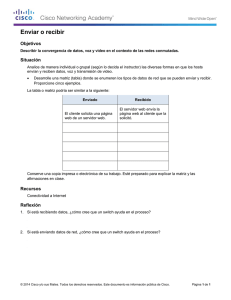
Objetivo: Diseñar Gc(s) y
realizarlo en un dispositivo tipo
3525, u otra implementación,
por ejemplo digital.
+
iR
C
R
v(t)
La señal vc(t) la podemos tratar
como una señal moduladora,
siendo la portadora una señal
triangular de periodo T.
iD
-
Driver
δ(t)
PWM
vc(t)
Gc(s)
+
ε(t)
-
vref
δ(t)
Cerrado
vc(t)
Abierto
D.T
T
t
Comportamiento en pequeña señal de las fuentes conmutadas
t
Generalización: vg(t) puede ser
una tensión continua o alterna,
vref puede ser una tensión
continua o alterna. Con un
esquema de control semejante
podemos controlar iL(t) u otra
variable, p.e. p(t). También
aplicaríamos este esquema
sobre otra topología básica o
derivada.
3/68
Julio 2007
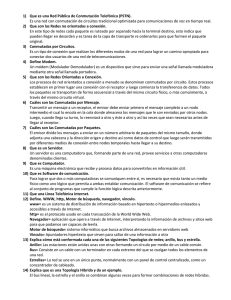
Introducción (III)
En este ejemplo Vg es constante. La tensión vaN está controlada en bucle cerrado con vref
sinusoidal y vbN con la opuesta.
A partir de dos convertidores Buck conectados de forma diferencial se obtiene un inversor.
Esta configuración tiene una ventaja adicional, se eliminan armónicos pares
vc(t)
T a+
+
T b+
a
Vg
R
L
+
T a-
v ab
b
T b-
Vd
v ab1
io1
N
0
φ
-
Comportamiento en pequeña señal de las fuentes conmutadas
Vd
4/68
Julio 2007
Introducción (IV)
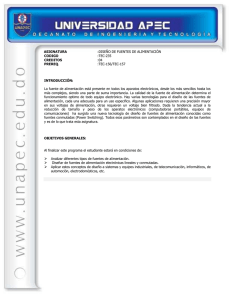
Ir a Simulink y hacer el muestreo con ZOH de periodo de muestreo constante sobre señales
sinusoidales de diferentes frecuencias y obtener conclusiones:
La señal muestreada permite reconstruir la señal original si la frecuencia de muestreo es al
menos el doble de la frecuencia de la sinusoidal (teorema del muestreo). Esto indica el ancho
de banda en el que nos podemos mover para reaccionar ante perturbaciones
El muestreo y reconstrucción producen distorsión y desfase. El desfase es T/2.
Si la frecuencia de la perturbación es alta la distorsión tiene componentes de baja frecuencia
Si la frecuencia de la perturbación es suficientemente baja la distorsión debida al muestreo
es de “alta frecuencia” y se filtra fácilmente.
Si la frecuencia de la perturbación es suficientemente baja el desfase, en ángulo, es
pequeño. Esto indica en qué medida, un sistema muestreado, nos acerca a una situación de
inestabilidad.
Comportamiento en pequeña señal de las fuentes conmutadas
5/68
Julio 2007
Introducción (V)
Muestreo 100kHz
Señal con perturbación de 10 kHz
Muestreo 100kHz
Señal con perturbación de 1 kHz
Comportamiento en pequeña señal de las fuentes conmutadas
Muestreo 100kHz
Señal con perturbación de 60 kHz
6/68
Julio 2007
Introducción (VI)
1
|ZOH(jω)|/Ts
|ZOH(jω)|/Ts
1
0.8
0.6
0.4
0.2
0.8
0.6
0.4
0.2
0
fm/fs
0.5
1
1.5
2
2.5
3
0
0.5 f
f/fs
Un convertidor conmutado con control PWM no es LTI.
La transformada de Laplace de un muestreador ideal es
vˆc* =
1
Ts
m/fs
⎛
∞
∑ vˆ ⎜⎜ s +
n = −∞
c
⎝
1
1.5
2
2.5
3
f/fs
j 2nπ
Ts
⎞
⎟⎟
⎠
Las réplicas se encuentran en nfs ± fm, donde fs =1/T es la frecuencia de conmutación, fm la
frecuencia de la perturbación, y n un entero.
La función de transferencia del zero-order hold en el dominio de la frecuencia es
ZOH ( jω ) = e − jωTs / 2Ts
Comportamiento en pequeña señal de las fuentes conmutadas
sin (ωTs )
ωTs
7/68
Julio 2007
Introducción (VII)
Si se desea realizar una regulación lineal de una fuente conmutada, el ancho de banda con
el que se puede trabajar tiene que ser suficientemente inferior a fs. Desde el punto de vista
teórico fs/2 y práctico fs/10 para no tener mucha influencia de la distorsión y retraso de fase
generada por el muestreo de vc.
Las variables a regular serán las tensiones, intensidades o potencias pero sin las
componentes de rizado de conmutación, es decir regularemos variables promedio tomando,
en principio, como periodo para realizar el promedio, T.
Excepción: En el caso de la tensión de salida de un corrector de factor de potencia se
realizará el promedio utilizando el periodo de la tensión de red rectificada (10ms).
Especificación de rizado Æ la resuelve el filtro
Especificación de valor promedio Æ la resuelve el regulador
Comportamiento en pequeña señal de las fuentes conmutadas
8/68
Julio 2007
Estudio en pequeña señal de modelos promedio (I)
Inicialmente se realiza el estudio de circuitos en conducción continua utilizando una
de las tres técnicas
- Promediado del circuito
- Variables de estado promedio
- Equivalente promedio de los elementos de conmutación
Esto permite obtener sistemas continuos, equivalentes al circuito conmutado.
Alrededor de un punto de funcionamiento se puede observar la aproximación lineal
del comportamiento del sistema equivalente promedio. Con un equivalente LTI se
puede estudiar el diagrama de bode
El resultado tiene validez en un ancho de banda limitado, no se modela la distorsión
ni el desfase adicional.
Comportamiento en pequeña señal de las fuentes conmutadas
9/68
Julio 2007
Estudio en pequeña señal de modelos promedio (II)
Para calcular el valor medio en un periodo se utiliza la aproximación de bajo
rizado, siempre que sea correcto
i
El área intensidad tiempo es idéntica si se
calcula con iL o con la aproximación de bajo
rizado < iL >
iL
<iL>
t
i
En este caso, el área intensidad tiempo es
no se puede calcular con la aproximación
de bajo rizado < iL >. Hay que realizar la
integral.
iL
<iL>
t
Comportamiento en pequeña señal de las fuentes conmutadas
10/68
Julio 2007
Ejemplo de promediado del circuito (I)
Método general, ejemplo Boost
i
iM
+
vg
(
iD
L
iC
C
M
R
v
vg + v (1 − d ) = L
-
(V
L
g
+
vg
V=
diˆ
vˆg + Vdˆ − vˆ(1 − D ) = L
dt
)
−
Vg
I=
1− D
V
(1 − D )R
sL ⎞ ˆ
⎛
⎜V − I
⎟d
1− D ⎠
⎝
+
-
Vdˆ
Idˆ
-
1:
C
v̂ g
)(
1
1− D
Comportamiento en pequeña señal de las fuentes conmutadas
Pequeña señal
L
(1 − D )2
+
+
-
)
Régimen permanente
vˆ
dvˆ
− Idˆ + iˆ(1 − D ) = C
R
dt
L
+
d i
dt
(
1
v̂ g
−
dI
diˆ
+ vˆg ) − (V + vˆ ) 1 − D − dˆ = L + L
dt
dt
V vˆ
dV
dvˆ
− − + I + iˆ 1 − D − dˆ = C
+C
R R
dt
dt
1: 1 − d
-
⎛
v
v ⎞
d v
⎟⎟(1 − d ) = C
d + ⎜⎜ i −
R
R ⎠
dt
⎝
v
d v
−
+ i (1 − d ) = C
R
dt
d i
dt
(
C
-
)
vg d + vg − v (1 − d ) = L
+
iR
C
I ˆ
d
1− D
1:
R
Forma canónica
1
1− D
11/68
Julio 2007
Ejemplo de promediado del circuito (II)
Utilizando el circuito en pequeña señal y cortocircuitando la perturbación de la tensión de
alimentación
1
⎡
vˆ( s)
= ⎢V
dˆ ( s) vˆ g ( s ) = 0 ⎣
R
sC
1
+R
V sL ⎤ 1
sC
−
⎥
1
R (1 − D )2 ⎦ 1 − D
R
sL
sC
+
(1 − D )2 1 + R
sC
vˆ( s )
dˆ ( s ) vˆ g ( s ) = 0
Leq =
1− s
L
(1 − D )2
Leq
vˆ( s)
V
R
=
ˆ
d ( s) vˆ g ( s ) = 0 1 − D 1 + s Leq + s 2 L C
eq
R
Identificando
Gd 0 =
1
R
V ⎛ sLeq ⎞
sC
⎜1 −
⎟
=
R ⎟⎠
1 − D ⎜⎝
⎛ 1
⎞ 1
+ R⎟ +
sLeq ⎜
R
sC
sC
⎝
⎠
V
1− D
ωz =
vˆ( s )
= Gd 0
dˆ ( s ) vˆ g ( s ) = 0
R
Leq
Comportamiento en pequeña señal de las fuentes conmutadas
ω0 =
1
Leq C
Q=R
1−
s
ωz
⎛ s ⎞
s
1+
+ ⎜⎜ ⎟⎟
Qω0 ⎝ ω0 ⎠
2
C
Leq
12/68
Julio 2007
Ejemplo con PSpice (I)
Método general, ejemplo Buck
Vgg
PWM_SAW1
1
c
s
S1 1m
2
+
1
vc
L1
R
Vdc
v out
5uH
IC =I 9A
Vcontrol
V1
1
Vd
0.75V
10m
100uF
IC = 5.5V
D
Rload
0.5
B
Vdc
TCLOSE = 200us
A
E1
F
E
+
-
8Vdc
U1
C1
2
8V
A
F1
GAIN = 0.75
B
R1
1
I
+
-
U3
TCLOSE = 200us
2
5uH
IC = 10.65A
10m
100uF
IC = 5.5V
C2
R2
0.5
2
L
f s = 100kHz
R3
0.5
GAIN = 0.75
Radd
0.5
0
0
30A
20A
10A
0A
0s
I(L1)
50us
I(L)
100us
150us
200us
250us
300us
350us
400us
450us
500us
Time
Comportamiento en pequeña señal de las fuentes conmutadas
13/68
Julio 2007
Ejemplo con Pspice (II)
d
+
-
vg
V2
0Vac
0Vdc
G1
+
-
R
d
S
vg
E2
+
-
F2
G
+
-
0
+
-
E3
E
R S
GAIN = 8
d
L2
V3
1
2
5uH
V
C3
100uF
E
F
GAIN = 12
R4
0.5
GAIN = 0.75
0
GAIN = 0.75
0
1Vac
0Vdc
20
0
-20
SEL>>
DB(V(L2:2))
0d
-90d
-180d
10Hz
P(V(L2:2))
30Hz
100Hz
300Hz
1.0KHz
3.0KHz
10KHz
30KHz
100KHz
Frequency
Comportamiento en pequeña señal de las fuentes conmutadas
14/68
Julio 2007
Variables de estado (I)
Método general, ejemplo Buck
Comportamiento en pequeña señal de las fuentes conmutadas
15/68
Julio 2007
Variables de estado (II)
x(t), vector de intensidad por inductancias y tensión en condensadores
K, valores de capacidades e inductancias (propias y mutuas)
u(t), vector de fuentes independientes
dx(t )
y(t), vector de salida
K
= A x(t ) + B u (t )
dt
Tiempo de ON Æ y(t ) = C x(t ) + E u(t )
1
dx(t )
K
= Ax(t ) + Bu (t )
dt
y (t ) = Cx(t ) + Eu (t )
Promedio Æ
1
Tiempo de OFF Æ
1
dx(t )
= A2 x(t ) + B2u (t )
dt
y (t ) = C2 x(t ) + E2u (t )
K
d x(t )
= (d (t ) A1 + (1 − d (t )) A2 ) x(t ) + (d (t ) B1 + (1 − d (t )) B 2 ) u (t )
dt
y (t ) = (d (t )C1 + (1 − d (t ))C 2 ) x(t ) + (d (t ) E1 + (1 − d (t )) E 2 ) u (t )
K
1
Régimen permanente Æ
Pequeña señal Æ
B = DB1 + (1 − D) B2
0 = AX + BU
X = − A−1 BU
Y = CX + EU
Y = − CA−1 B + E U
(
A = DA1 + (1 − D) A2
)
C = DC1 + (1 − D)C2
E = DE1 + (1 − D) E2
dxˆ (t )
= Axˆ (t ) + Buˆ (t ) + {( A1 − A2 )X + (B1 − B2 )U }dˆ (t )
dt
yˆ (t ) = Cxˆ (t ) + Euˆ (t ) + {(C1 − C2 )X + (E1 − E2 )U }dˆ (t )
K
Comportamiento en pequeña señal de las fuentes conmutadas
16/68
Julio 2007
Variables de estado (III)
Método general, ejemplo Directo con aislamiento
N1
ON
N3
N2
D1
iL L
x1
+
iC
Vi
Q1
+
vce
-
i D3
rL
+
+
x2 C
D2
-
rC
R
Vo
-
D3
− x 2 − CrC x& 2 + R( x1 − Cx& 2 ) = 0
− Vi + Lx&1 + rL x1 + R(x1 − Cx& 2 ) = 0
⎡ RrC + RrL + rC rL
−
⎡ x&1 ⎤ ⎢
L(R + rL )
⎢
=
⎢ x& ⎥
R
⎣ 2⎦ ⎢
⎢⎣
C (R + rC )
R
⎤
1
L(R + rC ) ⎥ ⎡ x1 ⎤ ⎡⎢ ⎤⎥
⎥ ⎢ ⎥ + L vi
1
⎥ ⎣ x2 ⎦ ⎢⎣ 0 ⎥⎦
−
C (R + rC )⎥⎦
−
x& = A1 x + B1vi
Comportamiento en pequeña señal de las fuentes conmutadas
17/68
Julio 2007
Variables de estado (IV)
Método general, ejemplo Directo con aislamiento
N1
OFF
N3
N2
D1
iL L
x1
+
iC
Vi
Q1
+
vce
-
+
+
x2 C
D2
i D3
rL
-
rC
R
Vo
-
D3
− x 2 − CrC x& 2 + R( x1 − Cx& 2 ) = 0
Lx&1 + rL x1 + R( x1 − Cx& 2 ) = 0
⎡ RrC + RrL + rC rL
−
⎡ x&1 ⎤ ⎢
L(R + rL )
⎢
=
⎢ x& ⎥
R
⎣ 2⎦ ⎢
⎢⎣
C (R + rC )
R
⎤
L(R + rC ) ⎥ ⎡ x1 ⎤
⎥⎢ ⎥
1
⎥ ⎣ x2 ⎦
−
C (R + rC ) ⎥⎦
−
x& = A2 x
Comportamiento en pequeña señal de las fuentes conmutadas
18/68
Julio 2007
Variables de estado (V)
vo = R( x1 − Cx&2 )
⎡ Rr
vo = ⎢ c
⎣ R + rc
vo =
R ⎤ ⎡ x1 ⎤
⎥
R + rc ⎦ ⎢⎣ x2 ⎥⎦
Rrc
R
x1 +
x2
R + rc
R + rc
vo = Cx
Obtención del promedio
x& = [A1d + A2 (1 − d )] x + [B1d + B2 (1 − d )] vi
vo = [C1d + C2 (1 − d )] x
Comportamiento en pequeña señal de las fuentes conmutadas
19/68
Julio 2007
Variables de estado (VI)
Si consideramos R>>(rC+rL)
⎡ rC + rL
⎢− L
A=⎢
1
⎢
⎣ C
1 ⎤
L ⎥
1 ⎥
⎥
−
RC ⎦
−
⎡1⎤
B = ⎢ L ⎥d
⎢0⎥
⎣ ⎦
C = [rC
1]
Una vez definido el modelo promediado continuo se realiza análisis en régimen permanente
o en pequeña señal
Comportamiento en pequeña señal de las fuentes conmutadas
20/68
Julio 2007
Variables de estado (VII)
Régimen permanente
x& = 0
AX + B1 DVi = 0
⎡ 1
⎢− CR
LC
−1
A =
rC + rL ⎢ 1
⎢−
1+
R ⎣ C
Vo = CX
1
⎤
⎥
L
rC + rL ⎥
⎥
−
L ⎦
Comportamiento en pequeña señal de las fuentes conmutadas
Vo
= −CA−1 B1 D
Vi
R + rC
Vo
=D
≅D
R + (rC + rL )
Vi
21/68
Julio 2007
Variables de estado (VIII)
Pequeña señal
Causas: d → D + dˆ
Efectos: x → X + xˆ
vi → Vi + vˆi
vo → Vo + vˆo
Para el caso de d̂
x& + xˆ& = AX + B1 DVi + A xˆ + B1Vi dˆ
xˆ& = A xˆ + B1Vi dˆ
Función de transferencia
vˆo = C xˆ
sxˆ ( s ) = Axˆ ( s ) + B1Vi dˆ ( s )
vˆo ( s ) = Cxˆ ( s )
Comportamiento en pequeña señal de las fuentes conmutadas
22/68
Julio 2007
Variables de estado (IX)
Pequeña señal
Función de transferencia
G (s ) = Vi
vˆo (s )
−1
= C [sI − A] B1Vi = G ( s )
dˆ (s )
1 + srC C
⎡
⎛ 1 rC + rL ⎞ 1 ⎤
LC ⎢ s 2 + s⎜
+
⎟+
L ⎠ LC ⎥⎦
⎝ CR
⎣
s + 2ςω o s + ω
2
El denominador es de la forma
ωo =
1
LC
r +r
1
+ C L
L
ς = CR
2ω o
Comportamiento en pequeña señal de las fuentes conmutadas
Q=
2
o
ωz =
1
2ς
1
rC C
23/68
Julio 2007
Variables de estado (X)
Pequeña señal
|G(s)| en dB
fase de G(s)
0o
ωo
ωz
ω
-90o
-180o
ωo
Comportamiento en pequeña señal de las fuentes conmutadas
ωz
ω
24/68
Julio 2007
Equivalente promedio de los elementos de conmutación (I)
+
vg
Red LTI
+
-
L
iL
iR
R
C
-
1
1’
+
iC
v
-
2
Red de
conmutación 2’
d
1
i1
i2
+
+
v1
v2
-
-
1’
2
d
Red de conmutación
Comportamiento en pequeña señal de las fuentes conmutadas
+
+
<v1>
2’
<i2>
<i1>
1
+
1-d
1-d
- <v2> d <i1> d
1’
2
<v2>
-
2’
Equivalente promedio
25/68
Julio 2007
Equivalente promedio de los elementos de conmutación (II)
<i2>
<i1>
1
+
+
<v1>
+
1-d
1-d
- <v2> d <i1> d
1’
2
<v2>
-
d v1 = (1 − d ) v2
Promedio
(1 − d ) i1
(D + dˆ )(V + vˆ ) = (1 − D − dˆ )(V + vˆ )
(1 − D − dˆ )(I + iˆ ) = (D + dˆ )(I + iˆ )
Perturbación
2’
1
1
2
1
Equivalente promedio
Lineal
iˆ1
+
v̂1
- +
1-D : D
V1
dˆ
D(1 − D )
-
1
I2
dˆ
D(1 − D )
1
1
1
2
2
2
(1 − D )I1 = DI 2
v̂2
Pequeña señal
2
DV1 = (1 − D )V2
Régimen Permanente
-
2
2
DV1 + Dvˆ1 + dˆV1 = (1 − D )V2 + (1 − D )vˆ2 − dˆV2
(1 − D )I + (1 − D )iˆ − dˆI = DI + Diˆ + dˆI
iˆ2
+
= d i2
Dvˆ1 + dˆV1 = (1 − D )vˆ2 − dˆV2
(1 − D )iˆ − dˆI = Diˆ + dˆI
1
1
2
2
Equivalente pequeña señal
Comportamiento en pequeña señal de las fuentes conmutadas
26/68
Julio 2007
Equivalente promedio de los elementos de conmutación (III)
Método general, ejemplo Buck
L1
1
D1
MUR480
2
2.4mH
I
C1
1u
V1
35Vdc
R1
60
PWM_SAW1
V2
1
c
s
2
0.6Vdc
R2
E1
+
-
+
-
M1
47
IRF530
E
600mA
GAIN = 15
f s = 100kHz
0
400mA
L2
1
2
2.4mH
U1
A
CCM1
1
2
I
3
5
C2
1u
4
R3
60
200mA
V3
A
35Vdc
V4
0.6Vdc
0A
0s
I(L1)
50us
I(L2)
100us
150us
200us
0
250us
300us
350us
400us
450us
500us
550us
600us
Time
.subckt CCM1 1 2 3 4 5
Et 1 2 value={(1-v(5))*v(3,4)/v(5)}
Gd 4 3 value={(1-v(5))*i(Et)/v(5)}
.ends
Comportamiento en pequeña señal de las fuentes conmutadas
27/68
Julio 2007
Equivalente promedio de los elementos de conmutación (IV)
L2
1
2
2.4mH
U1
A
1
2
V+
CCM1
IC = 0.35
3
5
C2
1u
IC = 21
4
V3
R3
60
A
35Vdc
V5
V-
1Vac
0Vdc
V4
0.6Vdc
0
40
0
-40
DB(V(R3:1,A))
0d
-90d
SEL>>
-180d
10Hz
30Hz
P(V(R3:1,A))
100Hz
300Hz
1.0KHz
3.0KHz
10KHz
30KHz
100KHz
Frequency
Comportamiento en pequeña señal de las fuentes conmutadas
28/68
Julio 2007
Modelado de convertidores en conducción discontinua (I)
Para modelar un convertidor obtenemos el valor promedio de las variables de estado.
a) En conducción continua las variables promedio son una función continua.
b) En conducción continua no hay restricciones impuestas asumiendo régimen
permanente.
En conducción discontinua pueden no cumplirse las condiciones a) y b)
Comportamiento en pequeña señal de las fuentes conmutadas
29/68
Julio 2007
Modelado de convertidores en conducción discontinua (II)
Ejemplo conducción discontinua
D1
L
+
+
Q1
vg
C
v
L
g
t
dT
[0, dT]
x& = A2 x + B2 v g
[dT, (d+d2)T]
x& = A3 x + B3v g
[(d+d2)T, T]
v
v
x& = A1 x + B1v g
v g -v
d 2T
(1-d)T
T
i
L
i
p
i
m
t
i
D1
i
p
i
o
Comportamiento en pequeña señal de las fuentes conmutadas
t
30/68
Julio 2007
Modelado de convertidores en conducción discontinua (III)
Ejemplo conducción discontinua
[0, dT]
D1
L
+
+
Q1
vg
C
v
dv
= R
C
dt
−
diL v g
=
dt
L
v
v
v
L
[dT, (d+d2)T]
g
t
dT
v g -v
d 2T
diL v g − v
=
dt
L
dv
=
dt
iL −
v
R
C
(1-d)T
T
i
L
i
[(d+d2)T, T]
p
i
m
t
i
D1
i
p
i
o
Comportamiento en pequeña señal de las fuentes conmutadas
diL
=0
dt
v
dv
= R
dt
C
−
t
31/68
Julio 2007
Modelado de convertidores en conducción discontinua (IV)
Ejemplo conducción discontinua
D1
L
Promedio
+
+
Q1
vg
C
d iL
v
dt
=
(d + d 2 ) vg
− d2 v
L
v
v
L
g
t
dT
v g -v
d 2T
d vc
=
dt
1
T
( d + d 2 )T
∫ iL dt −
dT
v
R
C
(1-d)T
T
i
L
i
¿¿d2??
p
i
m
t
i
D1
i
p
i
o
Comportamiento en pequeña señal de las fuentes conmutadas
t
32/68
Julio 2007
Paradoja del promedio (I)
En conducción discontinua la intensidad inicial y final en cada periodo es cero
D1
L
+
+
Q1
vg
C
v
[dT, (d+d2)T]
v
v
L
g
t
dT
v g -v
d 2T
T
L
L
i
m
t
D1
i
d+
vg − v
p
i
i
[(d+d2)T, T]
vg
(1-d)T
i
diL v g
=
dt
L
diL v g − v
=
dt
L
diL
=0
dt
[0, dT]
p
i
o
Comportamiento en pequeña señal de las fuentes conmutadas
d2 =
L
d vg
d2 = 0
v − vg
t
33/68
Julio 2007
Paradoja del promedio (II)
En conducción discontinua la intensidad inicial y final en cada periodo es cero
D1
L
+
+
Q1
vg
C
diL v g
=
dt
L
diL v g − v
=
dt
L
diL
=0
dt
[0, dT]
v
[dT, (d+d2)T]
v
v
L
[(d+d2)T, T]
g
t
dT
v g -v
d 2T
vg
(1-d)T
T
i
L
L
i
p
i
m
t
i
D1
i
d+
p
i
o
Comportamiento en pequeña señal de las fuentes conmutadas
d2 =
vg − v
L
vg
v − vg
d2 = 0
¿¿
d iL
dt
= 0 ??
t
34/68
Julio 2007
Paradoja del promedio (III)
Utilizar
d2 =
d vg
v − vg
Î
d iL
dt
=0
Supone decir que la función <iL> en la siguiente gráfica es constante
iL
t
Y, sin embargo es
<iL>
t
Comportamiento en pequeña señal de las fuentes conmutadas
35/68
Julio 2007
Paradoja del promedio (IV)
Si la intensidad en la inductancia tiene tiene una componente de baja frecuencia también
existirá una componente de baja frecuencia de tensión.
Sin embargo, un muestreador de tensión promedio en cada periodo kT obtiene
<vL>(kT)=0
vL
vg
t
dT
v g -v
d 2T
(1-d )T
T
iL
ip
t
Comportamiento en pequeña señal de las fuentes conmutadas
36/68
Julio 2007
Paradoja del promedio (V)
¿Qué ocurre?
a)
b)
c)
d)
e)
Se ha asumido d<iL>/dt=0
No se ha calculado la función continua de <iL>, sino que hemos muestreado <iL> en
cada periodo kT.
Se ha asumido el valor de <iL> muestreado constante para todo el periodo (hold de
orden cero).
Se ha muestreado una función con una frecuencia de muestreo igual a la de la
función.
Se da por hecho que dentro de un periodo la tensión de salida no cambia.
Comportamiento en pequeña señal de las fuentes conmutadas
37/68
Julio 2007
Orden reducido (I)
Se utiliza como ejemplo el convertidor elevador
d iL
Si para realizar el modelo utilizamos la restricción
dt
El orden del modelo promediado se reduce en 1
L
iL
RG
+
vg
+
d
iD1
Q1
iQ1
d iL
D1
+
C
Ro
v
-
dt
=
d v
dt
=0
(d + d 2 ) v g
− d2 v
L
=
d 2 iL
C
−
v
RC
¡Aproximación de bajo rizado!
Comportamiento en pequeña señal de las fuentes conmutadas
38/68
Julio 2007
Orden reducido (II)
Cálculo sin aproximación de bajo rizado
d2 = d
d v
1
=
C
dt
T
vg
v − vg
( d + d 2 )T
⎡v
⎤
⎛ v g dT v g − v
v⎞
v
(t − dT ) − ⎟⎟dt − (1 − d − d 2 )T ⎥
+
⎢ DT + ∫ ⎜⎜
R
L
L
R⎠
R
⎢⎣
⎥⎦
⎝
dT
d v
v g2 d 2T
v
=
−
dt
2 LC (v − v g ) RC
Comportamiento en pequeña señal de las fuentes conmutadas
39/68
Julio 2007
Orden reducido (III)
Circuito equivalente (Boost)
iA
L
MISSCO
iC
SW2
+
SW1
+
v
vg
0<t<dT: SW1 en ON, SW2 en OFF
iA = vg
t
L
iC = 0
DT<t<(D+D2)T: SW1 en OFF, SW2 en ON
iC = −i A
(
dT
t − dT )
iC = −vg
+ (v − vg )
L
L
(D+D2)T<t<T: SW1 en OFF, SW2 en OFF
iA = 0
iC = 0
Comportamiento en pequeña señal de las fuentes conmutadas
40/68
Julio 2007
Orden reducido (IV)
Circuito equivalente (Boost)
Respuesta promedio
iA = vg
T
d (d + d 2 )
2L
T
dd 2
2L
iC = − v g
<iA >
<i C>
+
+
2L
d (d +d 2)T
<v g >
d 2G
- <v g>M-1
C
RL
<v>
MISSCO
T
Definiendo los parámetros G =
2L
M =
v
vg
d + d2
=
d2
iC
G
= − vg d
M −1
2
¿Desaparece L del modelo?
Comportamiento en pequeña señal de las fuentes conmutadas
41/68
Julio 2007
Orden reducido (V)
Circuito equivalente
generalizado
v12
+
+
vD
-
1
i1
S
+
D
vL
+
v13
-
i2
+
L
i3
2
v23
-
3
d2 = −
2
i1 =
d v13 T
2L
Comportamiento en pequeña señal de las fuentes conmutadas
v13
v23
d
2
i2 = −
2
d v13 T
2 L v23
42/68
Julio 2007
Orden completo (I)
v12
+
+
d iL
dt
=0
vD
-
1
i1
S
+
vL
+
v13
-
i2
D
+
L
i3
2
v23
-
3
diL
L
= v12 + v23
dt
diL
L
= v23
dt
iL = 0
Comportamiento en pequeña señal de las fuentes conmutadas
0<t<dT: S en ON, D en OFF
dT<t<(d+d2)T: S en OFF, D en ON
(d+d2)T<t<T: S en OFF, D en OFF
43/68
Julio 2007
Orden completo (II)
v12
+
+
d iL
dt
vD
-
1
=0
i1
S
+
vL
+
v13
-
i2
D
+
L
i3
2
v23
-
3
iL
d + d 2 v12 + v23
dT
=
L
2
¡Este modelo considera <vL>=0 y que la tensión media de salida dentro de cada
periodo no varía!
Comportamiento en pequeña señal de las fuentes conmutadas
44/68
Julio 2007
Orden completo (III)
v12
+
vL = vD + v23
+
vD
-
1
v23 = − vD
i1
S
D
vL
+
d + d 2 v12 − vD
dT
iL =
L
2
v13
v12 − v D
d2 = −
d=
d
v23
vD
+
v13
-
i2
+
L
i3
2
v23
-
3
¡misma expresión que en orden
reducido!
Se introduce un nuevo parámetro, ciclo de trabajo equivalente, m, que relaciona la tensión
en los semiconductores.
m=
Comportamiento en pequeña señal de las fuentes conmutadas
vD
v12
45/68
Julio 2007
Orden completo (IV)
D2 se calcula con <vL>=0 pero <iL> lo calculamos introduciendo m.
Supone una mejora con respecto al orden reducido.
iL
v12
+
+
vD
d iL
-
1
i1
S
+
v13
-
i2
D
vL
+
2
dt
=
(1 − m) v12 − v13
+
L
i3
d 2T
⎛1
⎞
=
v12 ⎜ − 1⎟
2L
⎝m ⎠
v23
-
3
d v12
dt
=−
L
(1 − m ) iL
C
−
− v12
RC
Aparece L en el modelo, permite que iL cambie en sucesivos periodos, pero no dentro de
cada periodo, la tensión de salida no cambia dentro de cada periodo.
Comportamiento en pequeña señal de las fuentes conmutadas
46/68
Julio 2007
Orden completo (V)
Modelo de resistencia sin pérdidas (ejemplo Boost, pero el resultado es generalizado)
1
i1
i2
+
+
v1
v2
-
-
1’
2
2’
d
+
+
v1
v2
1’
v1 = v d 2 + v g (1 − d − d 2 )
(
)
v2 = v d + v − v g (1 − d − d 2 )
i1 =
i2 =
i2
i1
1
Re p1
-
d2 = d
2
v1 = v g
v2 = v − v g
i2 =
2L
v g dd 2T
Re =
Comportamiento en pequeña señal de las fuentes conmutadas
v − vg
2’
v g d 2T
2L
vg
vg
2
v − vg
d 2T
2L
2L
d 2T
47/68
Julio 2007
Orden completo (VI)
Modelo de resistencia sin pérdidas
2L
Re = 2
d T
v1 = Re i1
μ=
v2 = v1
1− μ
Re i1 + v2
+
+
<v1>
+
-
1−μ <i > μ
<v2>
1
μ
1-μ
1’
Comportamiento en pequeña señal de las fuentes conmutadas
1− μ
m
μ=
1− m
<i2>
<i1>
μ
v2 = Re i1
d2
μ=
2 Lf s i1
+d2
v2
v2
1
μ
2
<v2>
-
2’
48/68
Julio 2007
Orden completo (VII)
U2 CCM-DCM1
1
2
3
5
4
L = 100U
FS = 1E5
Tomado de ref. 8:
R.W. Erickson, D. Maksimovic.
Fundamentals of Power Electronics 2nd
edition. Kluwer Academic Publishers. 2001
**********************************************************
**********************************************************
* MODEL: CCM-DCM1
* Application: two-switch PWM converters, CCM or DCM
* Limitations: ideal switches, no transformer
**********************************************************
* Parameters:
*
L=equivalent inductance for DCM
*
fs=switching frequency
**********************************************************
* Nodes:
* 1: transistor positive (drain of an n-channel MOS)
* 2: transistor negative (source of an n-channel MOS)
* 3: diode cathode
* 4: diode anode
* 5: duty cycle control input
**********************************************************
.subckt CCM-DCM1 1 2 3 4 5
+ params: L=100u fs=1E5
Et 1 2 value={(1-v(u))*v(3,4)/v(u)}
Gd 4 3 value={(1-v(u))*i(Et)/v(u)}
* Ga 0 a value={MAX(i(Et),0)}
Ga 0 a value={i(Et)}
Va a b
Ra b 0 10k
Eu u 0 table {MAX(v(5),
+ v(5)*v(5)/(v(5)*v(5)+2*L*fs*i(Va)/v(3,4)))} (0 0) (1 1)
.ends
Comportamiento en pequeña señal de las fuentes conmutadas
49/68
Julio 2007
Orden completo (VIII)
U3 CCM-DCM2
1
2
1:N
5
3
4
N=1
L = 100U
FS = 1E5
Tomado de ref. 8:
R.W. Erickson, D. Maksimovic.
Fundamentals of Power Electronics 2nd
edition. Kluwer Academic Publishers. 2001
**********************************************************
**********************************************************
* MODEL: CCM-DCM2
* Application: two-switch PWM converters, CCM or DCM
*
with (possibly) transformer
* Limitations: ideal switches
**********************************************************
* Parameters:
*
L=equivalent inductance for DCM,
*
referred to primary
*
fs=switching frequency
*
n=transformer turns ratio 1:n (primary:secondary)
**********************************************************
* Nodes:
* 1: transistor positive (drain of an n-channel MOS)
* 2: transistor negative (source of an n-channel MOS)
* 3: diode cathode
* 4: diode anode
* 5: duty cycle control input
**********************************************************
.subckt CCM-DCM2 1 2 3 4 5
+params: L=100u fs=1E5 n=1
Et 1 2 value={(1-v(u))*v(3,4)/v(u)/n}
Gd 4 3 value={(1-v(u))*i(Et)/v(u)/n}
* Ga 0 a value={MAX(i(Et),0)}
Ga 0 a value={i(Et)}
Va a b
Ra b 0 10K
Eu u 0 table {MAX(v(5),
+ v(5)*v(5)/(v(5)*v(5)+2*L*n*fs*i(Va)/v(3,4)))}(0 0) (1 1)
.ends
Comportamiento en pequeña señal de las fuentes conmutadas
50/68
Julio 2007
Modelo continuo (I)
Se trata de obtener d2 sin que intervenga <vo>, de esta forma vo puede variar dentro del
periodo.
v12
+
v L = v13 d + v23 d 2 = L
+
vD
-
1
i1
S
+
vL
+
v13
-
i2
D
d2 = −
v23
3
dt
d
d + d2
d2
i2 = i3
d + d2
v23
-
3
v13
i1 = i3
+
L
i3
2
d i
d2 =
d
2 i3 L
v13 dT
−d
<i3> se obtiene integrando <vL>
Comportamiento en pequeña señal de las fuentes conmutadas
51/68
Julio 2007
Modelo continuo (II)
Circuito equivalente
v12
+
+
vD
1
-
1
i1
S
+
D
vL
+
v13
-
i2
<i2>
2
2
+
L
i3
<i1>
<i3>
v23
-
3
3
<i3>
L
<vL>
+
rL
Comportamiento en pequeña señal de las fuentes conmutadas
52/68
Julio 2007
Simulación
SIM-Model under CCM & DCM
for PWM Boost converter
Boost.sch
{Rinductor}
a
Vin_pulse
b
<BiasValue Power>
GVALUE
I(Lmain)
+-
Vin_DC
<BiasValue Power>
1V
EVALUE
(V(Don)*V(a,b)+V(Doff)*V(a,c))
Don
EDoff
- +
+
INOUT-
{Lmain}
<BiasValue Power>
0
VDon
Lmain
Gb
Gc
Vexcitation
{VDon}
0
out
<BiasValue Power>
Dbreak
Cout
{Cout}
PARAMETERS:
VIN_DC = 10v
VDON = 0.5
RLoad
<BiasValue Power>
Resr
{RLoad}
IN+
OUT+
IN+
OUT+
<BiasValue
Power>
{Resr}
GVALUE
GVALUE
PARAMETERS:
LMAIN = 75u
COUT = 220u
V(Don)*I(Lmain)/(V(Don)+V(Doff))
RLOAD = 10
V(Doff)*I(Lmain)/(V(Don)+V(Doff))
PARAMETERS:
RESR = 0.07
RINDUCTOR = 0.1
RSW = 0.1
Doff
<BiasValue Power>
<BiasValue Power>
- Power>
<BiasValue
Dmain
<BiasValue Power><BiasValue Power>
Rsw
<BiasValue Power>
<BiasValue Power>
INOUTINOUTIN+
OUT+
<BiasValue Power>
{Rsw}
Ga
-
1
<BiasValue Power>
EL
IN+
OUT+
INOUT-
+
{Vin_DC}
Rinductor
c
IN+
OUT+
INOUT-
etable
min(2*I(Lmain)*Lmain/(Ts*v(a,b)*V(Don))-V(Don),1-V(Don))
PARAMETERS:
FS = 100k
TS = {1/fs}
Tomado de Ref. 9:
S. Ben Yaakov "Computer aided design of power factor
correction systems" Professional education seminars
workbook. Vol. III. Seminar 11. APEC`03
Comportamiento en pequeña señal de las fuentes conmutadas
53/68
Julio 2007
Reguladores lineales (I)
Tipo 1
0
-20dB/dec
C
ω
R
Vi
Vref
ωc
Vo
Rb
0o
+
-90 o
1
Gc (s ) =
RCs
1
ωc =
RC
Comportamiento en pequeña señal de las fuentes conmutadas
-180 o
ωc
ω
54/68
Julio 2007
Reguladores lineales (II)
Tipo 2
-20dB/dec
C2
0dB/dec
ΔV
C1
-20dB/dec
R2
R1
Vi
-
Vo
Rb
Vref
Gc (s ) =
+
1
sC1 R2 + 1
(C1 + C2 )R1 ⎡ C1C2 R2 ⎤
+ 1⎥
s ⎢s
⎣ (C1 + C2 ) ⎦
-90 o
ΔV =
En este regulador ω z < ω p
y para ello
1
R2 C1
ωp =
ω
0o
1 C1 + C2
R2 C1C2
ωz =
ωp
ωz
C1 R2
(C1 + C2 )R1
C2 << C1 , por lo que
Comportamiento en pequeña señal de las fuentes conmutadas
ω
-180o
ωc
ωp ≅
1
R2 C2
ΔV ≅
R2
R1
55/68
Julio 2007
Reguladores lineales (III)
Tipo 3
ΔV2
+20dB/dec
-20dB/dec
C2
C3
;
R3
C1
ΔV1
R2
R1
-
Vi
Rb
Vo
ω
ωp1 ω p2
ω z1ωz2
+90 o
+
V ref
;
-20dB/dec
0o
Gc (s ) =
(sC1 R2 + 1)[sC3 (R1 + R3 ) + 1]
1
(C1 + C2 )R1 ⎡ C1C2 R2 ⎤
s ⎢s
+ 1⎥ (sC3 R3 + 1)
⎣ (C1 + C2 ) ⎦
ΔV1 =
;
ω z1 =
ω p1 =
1
R2 C1
1
R3 C3
ωz 2 =
1
(R1 + R3 )C3
ωp2 =
1 C1 + C2
R2 C1C2
ω
-90 o
C1 R2
(C1 + C2 )R1
ωz < ω p
si
R3 << R1
Comportamiento en pequeña señal de las fuentes conmutadas
ΔV2 =
C2 << C1
ωp2 ≅
entonces
(C1 R2 )[C3 (R1 + R3 )]
(C3 R3 )[(C1 + C 2 )R1 ]
1
R2C2
ΔV2 ≅
ΔV1 ≅
R2
R1
ΔV2 ≅
R2 (R1 + R3 )
R1R3
R2
R3
56/68
Julio 2007
Reguladores lineales (IV)
Cálculo del regulador en función del factor k
La frecuencia de corte a la que la ganancia global G(s)Gc(s) deberá tener ganancia unidad es ωco. Para obtener el
máximo margen de fase . ω co = ω zω p
Tomando en el regulador
de tipo 3 ωz1=ωz2=ωz y ωp1=ωp2=ωp, se define tanto para el regulador tipo 2 como para el
ω co ω p
=
=k
tipo 3
ω
ω
z
co
Regulador tipo 2
El adelanto de fase provocado por el cero en ωco es . θ ld = tan−1⎛ k1
−1
⎞
El retraso de fase provocado por el polo en ωco es . θ lag = tan ⎝ k ⎠
⎛1⎞
El retraso total de la función Gc(s) es . θ G (s ) = 90o − tan −1 k + tan −1 ⎜ k ⎟
⎝ ⎠
Conocido el retraso debido a la etapa de potencia y filtro G(s), y adoptando un valor para el margen de fase, MF se
θ G ( s ) + θ G ( s ) + MF ≤ 180 o
obtiene el valor del factor k de:
El MF aumenta si se elige un valor de k superior. El factor k sitúa las frecuencias ωz y ωp y por tanto los valores de los
componentes del regulador. La ganancia de H(s) tiene que ser tal que a ωco G(s)Gc(s)H(s)=0dB
c
c
Regulador tipo 3
El adelanto de fase provocado por el cero doble en ωco es .θ ld = 2 tan−1 k
El retraso de fase provocado por el polo doble en ωco es . θ lag = 2 tan−1 ⎝⎛ 1 ⎞⎠
k
El retraso total de la función Gc(s) es .θ G (s ) = 90o − 2 tan −1 k + 2 tan −1 ⎛⎜ 1 ⎞⎟
θ G ( s ) + θ G ( s ) + MF ≤ 180 o
k
⎝ ⎠
El MF aumenta si se elige un valor de k superior. El factor k sitúa las frecuencias ωz y ωp y por tanto los valores de los
componentes del regulador. La ganancia de Gc(s) tiene que ser tal que a ωco G(s)Gc(s)H(s)=0dB
c
Comportamiento en pequeña señal de las fuentes conmutadas
c
57/68
Julio 2007
Ejemplo de diseño (I)
iM
L
iL
iC
+
M
vg(t)
+
iR
C
R
v(t)
iD
-
Driver
δ(t)
PWM
vc(t)
Gc(s)
+
ε(t)
vref
-
Convertidor
v(t ) = f (v g , iR , d )
v g (t )
iR (t )
vref
+
ve (t )
-
Gc(s)
vc (t )
PWM
d (t )
perturbaciones
v(t )
control
H(s)
Comportamiento en pequeña señal de las fuentes conmutadas
58/68
Julio 2007
Ejemplo de diseño (II)
Modelo en pequeña señal
e( s )dˆ ( s )
1 : M ( D)
-
vˆg ( s )
Le
+
+
+
C
j ( s )dˆ ( s )
-
R
iˆc arg a ( s )
vˆ( s )
-
vˆ(s ) = Gvd (s )dˆ (s ) + Gvg (s )vˆg (s ) − Z out iˆc arg a (s )
vˆ(s )
Gvd (s ) =
dˆ (s ) vˆg =0
iˆc arg a = 0
vˆ(s )
Gvg (s ) =
vˆg (s ) dˆ =0
Comportamiento en pequeña señal de las fuentes conmutadas
iˆc arg a = 0
vˆ(s )
Z out (s ) = −
iˆc arg a (s ) dˆ =0
vˆ g = 0
59/68
Julio 2007
Ejemplo de diseño (III)
e( s )dˆ ( s )
1 : M ( D)
-
vˆg ( s )
+
+
+
C
j ( s )dˆ ( s )
-
Le
R
iˆc arg a ( s ) vˆ( s )
-
vˆref ( s )
vˆe ( s )
+-
Gc(s)
vˆc ( s )
dˆ ( s )
PWM
1/VM
H ( s )vˆ( s )
H(s)
Sensor
Comportamiento en pequeña señal de las fuentes conmutadas
60/68
Julio 2007
Ejemplo de diseño (IV)
Convertidor
iˆc arg a ( s )
Zout(s)
vˆg ( s )
vˆref ( s )
vˆe ( s )
+-
Gc(s)
vˆc ( s )
PWM
dˆ ( s )
Gvg(s)
Gvd(s)
+
-
vˆ( s )
+
1/VM
H ( s )vˆ( s )
H(s)
Sensor
vˆ(s ) = vˆref (s )
Gvg
Z out
Gc (s )Gvd (s ) VM
+ vˆg
− iˆc arg a
1 + H (s )Gc (s )Gvd (s ) VM
1 + H (s )Gc (s )Gvd (s ) VM
1 + H (s )Gc (s )Gvd (s ) VM
vˆ(s ) = vˆref (s )
Gvg
Z out
1
T (s )
+ vˆg
− iˆc arg a
H (s ) 1 + T (s )
1 + T (s )
1 + T (s )
T (s ) = H (s )Gc (s )Gvd (s ) VM
Comportamiento en pequeña señal de las fuentes conmutadas
Ganancia del bucle
61/68
Julio 2007
Ejemplo de diseño (V)
iM
L = 50μH
iL
iC
+
M
vg(t) = 28V
C=500μF
+
iR
v(t)
R=3Ω
iD
H(s)
-
Sensor
fs=100kHz
Driver
δ(t)
PWM
vc(t)
Gc(s)
+
ε(t)
-
VM=4V
Vref=5V
En régimen permanente
Vg=28V
V=15V, IR=5A
D=15/28=0,536
Vref=5V
Vc=DVM=2,14V
H=Vref/V=5/15=1/3
Comportamiento en pequeña señal de las fuentes conmutadas
62/68
Julio 2007
Ejemplo de diseño (VI)
V ˆ
d (s)
D2
-
vˆg ( s )
+
L
1: D
+
+
C
V ˆ
d ( s)
R
-
R
iˆc arg a ( s ) vˆ( s )
-
vˆref ( s ) = 0
vˆe ( s )
+-
Gc(s)
H ( s )vˆ( s )
dˆ ( s )
vˆc ( s )
T (s)
PWM
1
1
=
VM 4
H (s) =
1
3
Sensor
Comportamiento en pequeña señal de las fuentes conmutadas
63/68
Julio 2007
Ejemplo de diseño (VII)
d
+
-
0
+
-
V1
G1
d
+
-
0Vac
0Vdc
E2
E
L1
1
U1 IDEALTRAN
GAIN = 52.24
1
2
G
2
50u
1:N 3
C1
500u
4
R1
3
N = 0.536
GAIN = 5
0
d
E1
V3
+
-
1Vac
0Vdc
+
-
EV
GAIN = 0.33
0
0
40
0
-40
-80
DB(V(E1:3))
0d
-90d
SEL>>
-180d
10Hz
P(V(E1:3))
30Hz
100Hz
300Hz
1.0KHz
3.0KHz
10KHz
30KHz
100KHz
Frequency
Comportamiento en pequeña señal de las fuentes conmutadas
64/68
Julio 2007
Ejemplo de diseño (VIII)
3.7
1+9.25e-5*s
1 + 1.1e-5*s
E3
1+3.18e-4*s
3.18e-4*s
+
-
V4
+
-
40
E
1Vac
0Vdc
GAIN = 0.25
0
0
Ganancia
0dB a ωco
0
-40
Cero + polo
Margen de fase
SEL>>
-80
DB(V(E1:3))
DB(V(E3:3))
90d
0d
Polo en el origen + cero
Alta ganancia a baja frecuencia
-90d
-180d
10Hz
P(V(E1:3))
30Hz
P(V(E3:3))
100Hz
300Hz
1.0KHz
3.0KHz
10KHz
30KHz
100KHz
Frequency
40
(5.1855K,41.954m)
0
-40
DB(V(E1:3))
0d
-90d
(5.1855K,-132.371)
SEL>>
-180d
10Hz
P(V(E1:3))
30Hz
100Hz
300Hz
1.0KHz
Frequency
Comportamiento en pequeña señal de las fuentes conmutadas
3.0KHz
10KHz
30KHz
100KHz
65/68
Julio 2007
Conclusiones comentarios finales
1.- Los convertidores conmutados son procesadores digitales de energía
2.- Para tratarlos como sistemas LTI se debe trabajar con un ancho de banda suficientemente inferior a la frecuencia
de conmutación.
3.- El modelado promedio permite tratar un sistema conmutado como un sistema continuo, pero hace perder
información sobre distorsión y desfase.
4.- Para obtener una buena regulación se requiere analizar la función de transferencia de todo el lazo de regulación,
T(s), para:
Obtener la más alta frecuencia de corte, compatible con el punto 2.
Margen de fase de al menos 50º para evitar respuestas oscilatorias
Alta ganancia de T(s) a baja frecuencia, para reducir el error y el efecto de las perturbaciones
5.- Una buena regulación requiere una buena referencia, inmune a ruido, temperatura, etc…
6.- Además de regular en modo tensión, es habitual utilizar la regulación en modo corriente y un doble bucle; modo
corriente interno y modo tensión externo que puede dotar al sistema de mayor robustez con reguladores sencillos.
7.- En determinados sistemas es interesante plantear un control en modo potencia.
8.- Se puede obtener un ancho de banda de mayor frecuencia utilizando reguladores no lineales, p.e. One cycle
control.
9.- Para realizar reguladores digitales sin mayores prestaciones que los analógicos, cabe traducir la función de
transferencia del modelo promediado del dominio s al dominio z diseñar el regulador correspondiente considerando el
retraso de fase del tiempo de actualización de dato.
10.- Para obtener mayores prestaciones cabe tratar directamente la fuente conmutada como un sistema digital y
diseñar reguladores digitales no lineales.
Comportamiento en pequeña señal de las fuentes conmutadas
66/68
Julio 2007
Referencias (I)
1.
Jian Sun, Daniel M: Mitchell, Matthew F. Greuel, Philip T. Krein and Richard M. Bass. Modeling of PWM
Converters in Discontinuous Conduction Mode – A Reexamination. Proc. of the IEEE PESC’98 pp. 615 –
622. 1998
2.
Sam Ben – Yaakov, Dov Wulich, William M. Polivka. Resolution of an Averaging Paradox in the Analysis of
Switched –Mode DC-DC Converters. IEEE Trans on Aerospace and Electronics Systems. Vol. 30 No. 2
pp.626-632. April 1994
3.
Billy Y. Lau and R.D. Middlebrook. Small-Signal Frequency Response Theory for Piecewise-Constant Twoswitched-network DC-to-DC Converter Systems IEEE PESC 1986. pp. 186-200.
4.
R.D. Middlebrook. Small-Signal Modeling of Pulse-Width Modulated Switched-Mode Power Converters.
Proc. Of the IEEE, Vol. 76, No.4 April 1988. Pp.343-354.
5.
Dragan Maksimovic and Slobodan Cuk. A Unified Analysis of PWM Converters in Discontinuous Modes.
IEEE Trans. on Power Electronics Vol.6 No.3 July 1991. pp.476-490
6.
Dragan Maksimovic. Computer-Aided Small-Signal Analysis Based on Impulse Response of DC/DC
Switching Power Converters. IEEE Trans. on Power Electronics Vol.15 No.6 Nov. 2000. pp.1183-1191
7.
Yim-Shu Lee. Computer-Aided Analysis and Design of Switch-Mode Power Supplies. Marcel Dekker 1993.
8.
R.W. Erickson, D. Maksimovic. Fundamentals of Power Electronics 2nd edition. Kluwer Academic
Publishers. 2001
9.
S. Ben Yaakov "Computer aided design of power factor correction systems" Professional education seminars
workbook. Vol. III. Seminar 11. APEC`03
Comportamiento en pequeña señal de las fuentes conmutadas
67/68
Julio 2007
Referencias (II)
10.
N. Mohan, T.M. Undeland, W.P. Robbins. Power Electronics: Converters, Applications and Design. John
Wiley & Sons. 1995. 2ª Edición
11.
J.G. Kassakian, M.F. Schlecht y G.C. Verghese. Principles of Power Electronics. Addison Wesley Publishing
Company. 1991
12.
Rashid, M.H. Power Electronics. Circuits, Devices and Applications . Prentice Hall. 1993, 2ª Edición.
13.
Francisco J. Azcondo, Christian Brañas, Rosario Casanueva, Dragan Maksimovic. Approaches to Modeling
Converters with Current Programmed Control. Proc. of the 1st Power Electronics Education Workshop,
PEEW 2005-PESC05. pp. 98- 104. ISBN: 0-7803-9002-4.
14.
P. T. Krein, Elements of Power Electronics. New York and Oxford: Oxford University Press, 1998
15.
The Student Edition of MATLAB V.4. The Math Works. Prentice Hall, 1995
16.
The Student Edition of SIMULINK. The Math Works. Prentice Hall, 1996
Comportamiento en pequeña señal de las fuentes conmutadas
68/68
Julio 2007