controlador de temperatura para un diodo l´aser
Anuncio

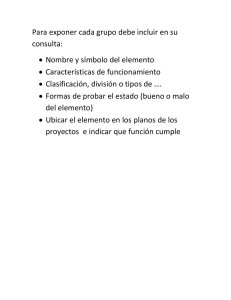
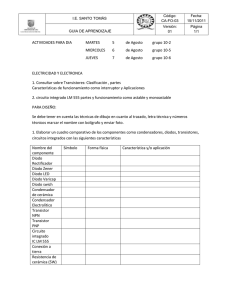
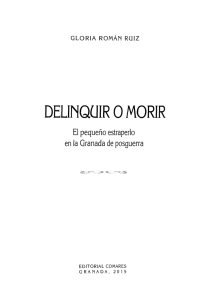
Pontificia Universidad Católica de Chile Facultad de Fı́sica Departamento de Fı́sica CONTROLADOR DE TEMPERATURA PARA UN DIODO LÁSER POR SERGIO JUAN PABLO GODOY MONTECINOS Informe de Práctica presentado a la Facultad de Fı́sica de la Pontificia Universidad Católica de Chile, como uno de los requisitos para optar al grado académico de Licenciado en Fı́sica Profesor Guı́a : Dr. Sascha Wallentowitz Comisión Informante : Dr. Birger Seifert Dr. Heman Bhuyan Agosto, 2011 Santiago, Chile AGRADECIMIENTOS Quiero agradecer al profesor Sascha Wallentowitz por el tiempo que destinó a ayudarme y guiarme en el desarrollo del presente trabajo y a mi familia por el apoyo brindado. Resumen En el presente trabajo se desarrolló un dispositivo que permite controlar la temperatura de un diodo láser instalado en un montaje óptico. El funcionamiento de este dispositivo se basa en medir la temperatura del diodo y luego regularla mediante un elemento Peltier para mantener una temperatura deseada de forma estable. Índice general 1. Introducción 2 1.1. El Láser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 1.2. Láser tipo semiconductor y dependencia de la temperatura . . . . . . . . . . . . 7 1.3. Proyecto a realizar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 2. Implementación en el montaje óptico 14 2.1. Configuración Littrow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3. Medidor de Temperatura 16 22 3.1. Termistores y PT1000 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 3.2. Linealización de voltaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 3.3. Circuito, amplificación y ajuste de rango . . . . . . . . . . . . . . . . . . . . . . . 26 3.4. Calibración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 4. Control de temperatura 33 4.1. Efecto Peltier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 4.2. Fuente de corriente variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 4.3. Montaje medidor de temperatura y Elemento Peltier . . . . . . . . . . . . . . . . 38 4.4. Modelo de conducción térmica 39 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. Conclusiones 53 1 Capı́tulo 1 Introducción En el campo de la óptica una de las herramientas más usadas es el láser. Esta herramienta genera una fuente de luz coherente y monocromática, la cual permite realizar estudios precisos para diversos intereses en investigación. En esta ocasión nos centraremos en la dependencia que tiene la luz de un láser semiconductor respecto de la temperatura, con el objetivo de construir un dispositivo controlador de temperatura. Para comenzar se explicará brevemente los principios teóricos de como funciona un láser, como funciona un láser semiconductor y luego se tratará la dependencia de alguna de sus propiedades con respecto a la temperatura. 1.1. El Láser La palabra láser es una abreviación del ingles “Light Amplification by Stimulated Emission of Radiation”, que quiere decir: “amplificación de luz por emisión estimulada de radiación”. Para poder entender esto de una manera simple, se puede pensar en un átomo con dos niveles electrónicos no degenerados de energı́as E1 < E2 . Los niveles electrónicos del átomo interactúan con los fotones del campo 2 CAPÍTULO 1. INTRODUCCIÓN eléctrico cuantizado cuya frecuencia vendrá dada por la diferencia de energı́a entre los estados, lo que puede ser representado según la expresión: ω0 = E2 − E1 . ~ (1.1) Los estados |1i y |2i son autoestados del Hamiltoniano del átomo Ĥ0 Ĥ0 |1i = E1 |1i Ĥ0 |2i = E2 |2i . (1.2) La interacción del dipolo eléctrico del átomo con el campo eléctrico de la luz está dada por V̂ = −dˆÊ. (1.3) Ĥ = Ĥ0 + V̂ . (1.4) Ası́ el Hamiltoniano completo es El vector de estado del átomo se puede obtener como una combinación lineal de sus dos estados |1i y |2i |Φatom i = c1 |1i + c2 |2i , (1.5) Mientras que el campo eléctrico cuantizado puede ser expresado en su vector de estado como una superposición de sus n fotones cuya frecuencia esta dada por la ecuación (1.1) (pensamos en fotones con la misma frecuencia mencionada para simplificar la idea). |Φcampo i = 3 X n cn |ni. (1.6) CAPÍTULO 1. INTRODUCCIÓN |2i |2i |2i ~ω |1i |1i B) A) |1i C) Figura 1.1: Transiciones de los estados atómicos debido a la interacción del átomo con el campo electromagnético cuantizado. A) Absorción, B) Emisión estimulada, C) Emisión espontánea El sistema acoplado es representado con un vector de estado que contiene la información del campo y de los estados del átomo: |Φa−c i = X n [c1,n |1i |ni + c2,n |2i |ni], (1.7) dada la interacción dipolar, expresada en la ecuación (1.3), entre el átomo y el campo cuantizado[1]. en el cuadro de interacción se presentan tres tipos de interacciones, como se presenta en la figura (1.1). El primer proceso es la absorción de un fotón y la transición del estado |1i al estado |2i; el segundo proceso es la emisión estimulada, en donde un fotón interactúa con un átomo en su estado electrónico |2i haciéndolo decaer al estado |1i, esto produce un nuevo fotón con propiedades 4 CAPÍTULO 1. INTRODUCCIÓN idénticas al incidente. Por último, está el proceso de emisión espontánea, donde un electrón en el estado |2i cae al nivel |1i, produciendo un fotón. Este proceso es una “emisión estimulada” producida por las fluctuaciones cuánticas del vacı́o electromagnético. El proceso de emisión estimulada, al generar más fotones, puede llegar a producir gran intensidad de radiación que tiene una frecuencia caracterı́stica dada por la ecuación (1.1), por lo cual tiene la propiedad de ser monocromática en un cierto grado. Usualmente en la emisión espontánea el átomo decae en una vida media caracterı́stica, la cual limita la precisión con la cual podemos medir la energı́a del fotón. Especı́ficamente el tiempo de medicion puede ser hecho aproximadamente a la vida media τ , con lo que se obtiene una incerteza en la diferencia de energı́as entre los niveles representada como: ∆E = ~ , τ (1.8) lo cual mediante la relación entre frecuencia y energı́a ∆ω = ∆E/~, y la expresión (1.8), se obtiene un ancho de banda en el espectro de frecuencias que se puede medir, y está dado por: ∆ω = 2π . τ (1.9) Esto muestra que la luz emitida no es perfectamente monocromática, si no que tiene un rango de frecuencias que está determinado por la vida media del átomo, en torno a una frecuencia principal ω0 . Múltiples emisiones espontáneas dentro de un ensemble de átomos son estadı́sticamente independientes si ocurren con un lapso de tiempo mas grande que τ . Ası́ τ es el tiempo de coherencia y Lc = cτ, 5 (1.10) CAPÍTULO 1. INTRODUCCIÓN es el largo de coherencia. Dentro de este rango el haz de luz tiene la propiedad de ser coherente, es decir puede mostrar interferencia. Este proceso es caracterı́stico para la generación de luz en ampolletas o LED(Light-Emitting Diode: “diodo emisor de luz”). Para generar un láser se necesita un medio activo, el cual puede ser lı́quido, gaseoso o sólido, confinado en una cavidad resonante de radiación donde se pueda generar el proceso de emisión estimulada de forma estable. Para esto es necesario entregar energı́a al medio constantemente para producir una inversión en la población de estados, aumentando la población de átomos con electrones en el estado |2i, lo cual permite hacer una transición al estado |1i generando radiación. Viéndolo de una manera más realista se necesita excitar estados electrónicos que puedan realizar transiciones dipolares con otros estados de menor energı́a lo cual producirá fotones dentro de la cavidad. La entrega de energı́a de manera continua es llamada bombeo y mantiene los átomos en niveles excitados produciendo gran cantidad de fotones en el interior de la cavidad. La energı́a en la onda estacionaria, se amplifica y produce una fuerte intensidad de radiación. Con la condición mλ = L , (1.11) donde L es el largo de la cavidad, se determinan las longitudes de onda λ, seleccionando un cierto tipo de transición de estados, dado que se ha invertido la población de los estados eléctricos correspondientes. La cavidad está formada por espejos que reflejan la luz generando una cavidad resonante de radiación. Uno de los espejos tiene una reflectividad menor a 100 % por lo que se transmite una pequeña fracción de la intensidad al exterior, donde se genera un haz de luz monocromático y coherente. Este proceso activo resulta en una de luz con un ancho de lı́nea ∆ω 6 CAPÍTULO 1. INTRODUCCIÓN mucho menor que el ancho natural de la transición. En esta manera el largo de coherencia, se obtiene combinando las ecuaciones (1.9) y (1.10) L= 2πc , ∆ω (1.12) aumenta de centı́metros a cientos de metros y más. 1.2. Láser tipo semiconductor y dependencia de la temperatura En este trabajo se utilizara un tipo de láser cuyo medio activo esta constituido por un semiconductor. La diferencia de energı́a que existe entre las bandas de conducción y de valencia en un semiconductor marca la región prohibida donde no puede haber electrones, estos solo se pueden ubicar en las bandas de valencia y de conducción según la distribución de Fermi-Dirac f= 1 , 1 + e(E−EF )/kB T (1.13) donde E es la energı́a de los estados electrónicos, kB es la constante de Boltzmann, EF es la energı́a del nivel de Fermi y T es la temperatura absoluta del sistema. El paso de electricidad a través del semiconductor se explica por los electrones que son promovidos a la banda de conducción, dado un voltaje necesario, y por los agujeros generados en la banda de valencia a causa de esto mismo. Este proceso produce una tasa de recombinación entre los agujeros y los electrones que decaen de la banda de conducción generando la emisión de fotones. La diferencia entre la energı́a mı́nima de la banda de conducción EM y el máximo 7 CAPÍTULO 1. INTRODUCCIÓN Banda de conduccion Ec EM E = ~ω Eg Em Ev U =0 Banda de V alencia U >0 Figura 1.2: Recombinación y emisión de fotones en un semiconductor con dopaje. Al aplicar un voltaje se generan nuevas energı́as de Fermi en las bandas de conducción y de valencia. Esto produce que se generen electrones en la banda de conducción que pueden recombinarse con los agujeros de la banda de valencia, produciendo fotones. de energı́a en la banda de valencia Em es llamada energı́a de “band gap” Eg = EM − Em , (1.14) y corresponde al mı́nimo de energı́a que debe ser entregada a un electrón para que pueda pasar de la banda de valencia a la banda de conducción. Los electrones que son promovidos a la banda de conducción dejan huecos en la banda de valencia lo que determina un nuevo nivel de Fermi para los electrones dentro de la banda de valencia, llamado nivel de Fermi para la banda de valencia Ev . De igual manera los electrones que ocupan parte de la región dentro de la banda de conducción determinan un nuevo nivel de Fermi para esta banda llamado Ec , esto se ve representado en la figura (1.2). La banda de conducción tiene mı́nimos como función del vector de onda del electrón, al igual que la banda de valencia tiene máximos. Cuando un máximo y un 8 CAPÍTULO 1. INTRODUCCIÓN E E Ec EM EM fonon ∆E = ~ω ~k ~k Em Em Semiconductor Ev Semiconductor indirecto directo Figura 1.3: Bandas de conducción y valencia en semiconductores. mı́nimo respectivamente coinciden para el mismo momentum del electrón se habla de un semiconductor directo y cuando no coinciden se habla de un semiconductor indirecto. En el último caso, las transiciones electrónicas generan fonones en la red cristalina que se traduce en un calentamiento del material, ver la figura 1.3. En los semiconductores directos los procesos de recombinación producen fotones cuya frecuencia aproximada se obtiene de las expresiones (1.1) y(1.14) ω= Eg . ~ (1.15) El semiconductor usado para diodos láser esta hecho del material GaAs. Este material se convierte en un semiconductor “tipo n” mediante la adición de impurezas de telurio o selenio, de modo de aumentar la densidad de donadores alcanzando 1017 a 1018 cm−3 [2] y se convierte en un semiconductor “tipo p”por medio de la difusión de átomos de zinc como elemento aceptor, con lo que la cantidad de aceptores suele alcanzar entre 1018 a 5 · 1019 cm−3 . Los cristales son cortados según planos de corte paralelos y se los emplea como interferómetros de Fabry-Perot para 9 CAPÍTULO 1. INTRODUCCIÓN Zona Activa p n I Figura 1.4: Unión p-n de semiconductores dopados construir la cavidad resonante. Como el ı́ndice de refracción del GaAs es 3,6, las caras libres del diodo tienen una reflectividad del 32 % por lo que no se necesitan recubrimientos para aumentar la reflectividad. El diodo láser se construye con la unión p-n de semiconductores, como se muestra en la figura (1.4), donde se aplica una diferencia de voltaje para producir una región activa donde se recombinan electrones y huecos de los semiconductores dopados. A través de la juntura se determina la región activa donde se produce radiación producto de la recombinación, ver figura (1.4). La energı́a eléctrica que se entrega a la región determina el bombeo que hace la inversión en la población de electrones, luego la cavidad determina la longitud de onda que sera finalmente amplificada. Dados los niveles de ocupación de los electrones en la banda de conducción y los huecos generados en la banda de valencia en la región de recombinación, la frecuencia de radiación emitida cumplirá con la condición Eg < ~ω < Ec − Ev , 10 (1.16) CAPÍTULO 1. INTRODUCCIÓN p p n n Ec Eg Eg Ec Ev Ev U >0 U =0 Figura 1.5: Bandas de conducción y valencia en semiconductores, en unión p-n. 1) sin voltaje aplicado 2) con un voltaje aplicado que determina la región de recombinación. ya que existe una densidad de electrones sobre el mı́nimo de la banda de conducción, que pueden recombinarse con la densidad de huecos que están bajo el máximo de la banda de valencia, ver figura (1.5). Esto determina un ancho de banda para las frecuencias emitidas por la region activa del semiconductor. La región activa de la unión p-n tiene un grosor aproximado de 100nm, lo cual se ve en la figura (1.6). Al aplicar un voltaje a la juntura p-n los electrones se moverán de la región n a la región p y los agujeros de la región p a la n. Al ocurrir esto la juntura se convierte en una fuente de radiación y a su vez también se convierte en una fuente de calor, debido a la corriente que pasa se genera una potencia P con la cual se calienta el material mediante el efecto joule P ∝ I 2 , lo que produce una variación de la temperatura generando una expansión térmica en el material: ∆L = α∆T, L 11 (1.17) CAPÍTULO 1. INTRODUCCIÓN ∆U I p Hazlaser Region activa 100nm n L Figura 1.6: Cavidad resonante donde se genera el proceso de emisión estimulada. donde α = 2,6 · 10−6◦ C−1 es el coeficiente de expansión térmica. Ası́ la cavidad resonante cambia sus caracterı́sticas con la temperatura. Dado que la longitud de onda depende del tamaño de la cavidad (1.11) un cambio en la temperatura produce un cambio en la longitud de onda. Como el medio sigue siendo el mismo se cumple que λν = c/nGaAs donde nGaAs es el ı́ndice de refracción del GaAs y c es la velocidad de la luz, con lo que se genera un cambio en la frecuencia del láser en función de la temperatura: ∆ν(T ) = −α∆T, ν (1.18) lo que muestra que la frecuencia disminuye cuando aumenta la temperatura. Debido a la distribución de los estados energéticos segun la expresión (1.13) las bandas de conducción y de valencia se aproximan disminuyendo la energı́a Eg debido al aumento de temperatura [3], esto trae una disminución en la frecuencia 12 CAPÍTULO 1. INTRODUCCIÓN del láser como se ve en la expresión (1.15). Los procesos de expansión térmica y de disminución del band gap debido a la temperatura disminuyen la frecuencia del láser, lo que genera una motivación para hacer un sistema de control de temperatura. 1.3. Proyecto a realizar Ya con una introducción del funcionamiento de un diodo láser y su relación con la temperatura, se podrá entender el objetivo propuesto para el proyecto que se pretende realizar en el laboratorio de óptica, que consiste básicamente en la creación de un dispositivo electrónico para el control automatizado de la temperatura de un diodo láser, con el fin de mantener estable su frecuencia. Para esto se hará necesario la construcción de un circuito que permita medir la temperatura del diodo y a la vez regularla mediante un proceso de enfriamiento, ambos procesos funcionando de manera simultanea. 13 Capı́tulo 2 Implementación en el montaje óptico El controlador de temperatura fue construido para ser usado en una configuración óptica donde se pretende estudiar el espectro de frecuencia del láser. El uso del controlador de temperatura permite reducir los cambios producidos en la frecuencia del láser por efecto de las variaciones de la temperatura, con lo que se obtiene un ancho de banda en la frecuencia del láser bien determinado (dadas las caracterı́sticas de la cavidad, como ya se explicó en el capı́tulo 1). El ancho de banda del láser puede ser modificado mediante un montaje óptico que consiste en generar una cavidad resonante externa conocida como “configuración Littrow” [4], que además permite tener control sobre la frecuencia principal del láser. Al hacer una cavidad externa utilizando en un extremo una rejilla de difracción se pueden seleccionar longitudes de onda que reingresen a la cavidad, disminuyendo el ancho de banda del láser. La superficie de una red de difracción está cubierta por un patrón de surcos con espejos los cuales se convierten cada uno en una nueva fuente de radiación al reflejar el haz incidente, como se muestra 14 CAPÍTULO 2. IMPLEMENTACIÓN EN EL MONTAJE ÓPTICO Luz incidente θi θm B C θi θm A d Figura 2.1: Esquema de una red de difracción. Al incidir ondas planas sobre la red cada punto en la rejilla genera un nuevo frente de onda. En el esquema, θi representa el ángulo entre el haz incidente y la normal de la red y θm representa el ángulo del orden m. en la figura (2.1). En la figura se puede ver que los desfaces producidos por la red son representados por los trazos AB = d sin θi AC = d sin θm , (2.1) donde d es del orden de λ; θm corresponde al ángulo del orden m y θi corresponde al ángulo entre la normal a la red y el haz incidente. Las nuevas ondas elementales se superponen generando un patrón de interferencia con máximos y mı́nimos de intensidad en función del ángulo. Cuando se cumple que AB − AC = mλ, se 15 CAPÍTULO 2. IMPLEMENTACIÓN EN EL MONTAJE ÓPTICO obtienen máximos de interferencia en el orden m, segun: mλ = d(sin θi − sin θm ). (2.2) Como bien se aprecia en la ecuación los máximos de intensidad para θm dependen de la longitud de onda [5], por lo que distintas longitudes de onda generan distintos patrones de difracción, con lo que al crear una cavidad resonante externa se pueden filtrar aun mas las longitudes de onda que se mantengan en la cavidad. 2.1. Configuración Littrow La cavidad de un diodo esta formada por dos espejos con un determinado ı́ndice de reflectividad, encerrando las ondas amplificadas por el proceso de emisión estimulada, lo que es conocido como interferómetro de Fabry-Perot [5], mostrado en la figura (2.2). En la cavidad un espejo tiene un ı́ndice de reflectividad R = 1 mientras el otro tiene un ı́ndice R < 1, por lo que una parte de la radiación puede salir de la cavidad como luz del láser. En el interior de la cavidad de un láser se amplifican las ondas cuya longitud de onda cumpla con la condición (1.11), por lo que la distancia entre los espejos es determinante en la selección de la longitud de onda que produce el láser. Pequeñas variaciones en la temperatura pueden producir que se amplifiquen otras longitudes de onda. Se coloca un lente colimador de tal manera que el diodo este ubicado en su foco para colimar el haz de luz. Luego se coloca la rejilla de difracción de tal forma que el primer orden de difracción entre al diodo generando una nueva cavidad resonante. La condición que se debe cumplir es que θ1 = −θi para m = 1, imponiendo esta 16 CAPÍTULO 2. IMPLEMENTACIÓN EN EL MONTAJE ÓPTICO R=1 n1 n 2 > n1 R<1 11 00 00 11 n >1 naire = 1 00 11 00 GaAs 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 1111111 0000000 00 11 L 00 11 00 11 n1 Figura 2.2: Interferómetros de Fabry-Perot. A la izquierda interferómetro con espejos de ı́ndices de refleccion menores a uno y con un ángulo agudo de incidencia. A la derecha interferómetro en la cavidad de un láser, uno de los espejos tiene reflectividad uno mientras que el otro tiene menor que uno. La luz tiene un ángulo de incidencia igual a cero grados. 17 CAPÍTULO 2. IMPLEMENTACIÓN EN EL MONTAJE ÓPTICO orden m = 0 R=1 11 00 00 11 00 Diodo 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 R<1 θ0 θ1 orden m = 1 Red de difraccion Colimador L0 L Figura 2.3: Configuración Littrow. condición en la ecuación (2.2) se obtiene que sin θ1 = λ , 2d (2.3) esta configuración es conocida como configuración ”Littrow“ [5]. Como se aprecia en la figura (2.3). De esta manera se logra reducir el ancho de banda de la cavidad del diodo láser ∆ν a un ancho de banda menor ∆νext con la cavidad externa y a su vez permite fijar la frecuencia principal ν0 al variar el ángulo θ1 como se expresa en la ecuación (2.3). Para que se amplifique un modo en la cavidad externa se necesita que se cumplan las condiciones dadas por las ecuaciones (1.11) y (2.3), de no ser ası́ se producirı́a un salto entre modos dentro de la cavidad, viéndose dos frecuencias distintas alternándose a través del tiempo. Este problema hace inestable la configuración por lo que se debe tener especial cuidado al variar θ1 , ya que este cambio tiene que producir un largo adecuado de la cavidad para que se cumplan las dos condiciones. 18 CAPÍTULO 2. IMPLEMENTACIÓN EN EL MONTAJE ÓPTICO Figura 2.4: Montaje de la configuración Littrow. Esta configuración fue montada en el laboratorio en donde se usaron piezas de acero para sostener la red de difracción y el espejo, como muestra la foto del montaje en la figura (2.4). Para poder fijar la base del conjunto diodo y controlador de temperatura, dando un grado de libertad para poder adecuar la altura a la que sale el haz del láser, se diseño una pieza de aluminio que permite sujetar la base óptica de forma mecánica mediante pernos que ejercen presión, como se ve en la figura (2.5). La pieza ya implementada se muestra en la figura (2.6) del montaje, donde se ve que la pieza regula la altura del diodo permitiendo que el haz salga recto en el mismo plano que el colimador y la red. 19 CAPÍTULO 2. IMPLEMENTACIÓN EN EL MONTAJE ÓPTICO Tornillo 0 1 1 0 0 1 0 1 0 1 1 0 0 1 0 1 0 1 0 1 0 1 1 0 1 0 1 0 1 0 1 0 5 111 000 000 111 000 111 =45,22 Base Tornillo 48 00 11 00 11 00 11 00 11 00 11 32 50,8 50,8 Figura 2.5: Pieza de aluminio para la base del conjunto controlador de temperatura y diodo láser, todo en mm. 20 CAPÍTULO 2. IMPLEMENTACIÓN EN EL MONTAJE ÓPTICO Figura 2.6: Pieza de Al construida para la base del control de temperatura y diodo. 21 Capı́tulo 3 Medidor de Temperatura Para tener un controlador de la temperatura del diodo es necesario tener un dispositivo que pueda medir la temperatura en cada momento. Para optimizar la construcción del medidor de temperatura acotaremos el rango en que deseamos medir, el cual será de 0◦ C a 100◦ C ya que la temperatura del diodo, por las caracterı́sticas de este, siempre estará contenida en este rango. Por lo anterior se hace necesario utilizar algún tipo de dispositivo que sea capaz de medir la temperatura en el rango deseado y poder integrarlo a un circuito de control. 3.1. Termistores y PT1000 Los materiales cuya resistividad eléctrica es sensible a la variación de temperatura son llamados termistores. Hay dos tipos de termistores[6]: los que su resistividad eléctrica aumenta con el incremento de la temperatura(“PTC”, positive temperature coefficient) y los que su resistividad disminuye con el incremento de la temperatura(“NTC”, negative temperature coefficient). La resistencia de los metales aumenta con el incremento de temperatura, los mas usados son el Pt y el Acero-Nickel. El rango de medición para el Pt es de 22 CAPÍTULO 3. MEDIDOR DE TEMPERATURA 0◦ C ≤ θ ≤ 850◦ C y para el acero-nickel −50◦ C ≤ θ ≤ 150◦ C donde θ es la temperatura en grados Celsius. De los materiales ya mencionados es más fácil encontrar dispositivos de platino por lo cual este será el material empleado para medir temperatura. Existen distintos medidores a base de Pt y estos se diferencian en la resistencia eléctrica que tienen a θ = 0◦ C, un valor usual es 100Ω (PT100), pero también se puede encontrar de 200Ω (PT200), 500Ω (PT500) y de 1000Ω (PT1000). Dentro del mercado chileno el dispositivo mas accesible para la realización del medidor fue el PT1000. La variación de la resistencia del Pt según la temperatura se puede modelar hasta segundo orden en la temperatura (ordenes superiores son despreciables) con la ecuación: Rθ = R0 [1 + αθ − (βθ)2 ], (3.1) donde R0 es la resistencia a cero grados Celsius (para nuestro caso 1000Ω) y los coeficientes son α = 3, 9 · 10−3 ◦ C−1 y β = 0, 76 · 10−3 ◦ C−1 [6]. Se uso el termistor PT1000 ya que su rango de medición se ajusta al rango deseado siendo mas simple de utilizar en comparación a otros termistores como por ejemplo una termocupla, y su precio en el mercado es mas conveniente que otro tipo de Pt. 3.2. Linealización de voltaje Para poder medir las variaciones de temperatura mediante el PT1000 se utilizó un circuito divisor de voltaje, con un voltaje de referencia Uref constante como muestra la figura (3.1). En este circuito la resistencia Rlin tiene que tener un valor especifico para que el voltaje de salida tenga un comportamiento lineal con la 23 CAPÍTULO 3. MEDIDOR DE TEMPERATURA Rlin Uref Uθ Rθ Figura 3.1: Circuito divisor de voltaje. La resistencia Rlin es utilizada para linealizar el voltage de salida Uθ con respecto a la temperatura; la resistencia Rθ representa al termistor PT1000 y Uref representa un voltaje de referencia constante. variación de temperatura en el rango de temperaturas deseado. La dependencia del voltaje de salida Uθ y la variación de la resistencia por la temperatura Rθ en el PT1000 viene dada por la expresión: Uθ = Rθ Uref . Rθ + Rlin (3.2) Para obtener una dependencia lineal con la temperatura es necesario expandir la dependencia de Uθ en diferentes ordenes de θ y luego encontrar el valor de Rlin necesario para poder despreciar los terminos de ordenes iguales o superiores a dos. Reordenando y reemplazando la expresión de Rθ en el denominador por la expresión obtenida de la ecuación (3.1) se obtiene Rθ Rθ = Rθ + Rlin R0 + Rlin 24 1 1+ R0 αθ−R0 (βθ)2 Rlin +R0 ! . (3.3) CAPÍTULO 3. MEDIDOR DE TEMPERATURA Expandiendo en series la expresión (3.3) resulta " Rθ Rθ R0 (αθ − (βθ)2 ) = 1− + Rθ + Rlin R0 + Rlin R0 + Rlin R0 (αθ − (βθ)2 ) R0 + Rlin !2 # + ϑ(θ3 ), (3.4) reordenando y reemplazando Rθ que faltaba en el numerador genera " !# Rθ R0 (1 + αθ − (βθ)2 ) R0 R0 2 2 = 1− αθ − (βθ) − (αθ) . Rθ + Rlin R0 + Rlin R0 + Rlin R0 + Rlin (3.5) Para simplificar la expresión se utilizó x= R0 , R0 + Rlin (3.6) lo cual al reordenar queda Rθ = x[1 + (1 − x)αθ + x(β 2 θ2 + xα2 θ2 ) − xα2 θ2 − β 2 θ2 ]. Rθ + Rlin (3.7) Como se busca el factor de θ2 , se factorizó la expresión (3.7) quedando como Rθ = x[1 + (1 − x)αθ + x(x − 1)α2 θ2 + (x − 1)β 2 θ2 ], Rθ + Rlin (3.8) imponiendo la condición de anular el factor de θ2 , se obtiene la siguiente ecuación cuyas soluciones son: x(x − 1)α2 + (x − 1)β 2 = 0, (3.9) 2 β x+ = − y x− = 1 . α (3.10) Vemos que en ambos casos las soluciones no dan la posibilidad de anular el factor de θ2 , ya que el cuociente dado en la expresión (3.6) no puede ser negativo con lo que se descarta x+ y tampoco se puede tener que R0 o Rlin sea igual a cero, por lo 25 CAPÍTULO 3. MEDIDOR DE TEMPERATURA Rlin Rlin Uout Uref Rθ R1 R3 Figura 3.2: Circuito linealizador de voltaje y medidor de temperatura. que se descarta también x− . De esta manera se prueba que el circuito no se puede linealizar completamente mediante Rlin . La manera de solucionar el problema de la no linealidad se propone en un libro de electrónica [6], donde se reduce el factor cuadrático en un rango de temperaturas utilizando tres puntos de la curva para Uθ . Dentro de un rango de 0◦ C ≤ θ ≤ 100◦ C se propone Rlin = 28kΩ, con lo que se espera un comportamiento lineal de Uθ con la temperatura [6]. 3.3. Circuito, amplificación y ajuste de rango Además de la variación de voltaje con respecto a la temperatura, se hace necesario fijar el rango de voltaje que se quiere obtener, para esto al valor obtenido se le resta un voltaje constante destinado a fijar el “mı́nimo voltaje” se amplifica la señal mediante el uso de un amplificador operacional (Opa.). El circuito empleado se presenta en la figura (3.2). Por definición el Opa amplifica con un factor A 1 la diferencia de los voltajes que entran en él, lo que se expresa en: Uout = A(U+ − U− ). 26 (3.11) CAPÍTULO 3. MEDIDOR DE TEMPERATURA De la figura (3.2) se obtienen los voltajes de entrada al Opa que determinan la salida: U− = R1 Uref Uout + R1 + R2 R1 + R3 , U+ = Uθ . (3.12) Juntando las ecuaciones (3.11) y (3.12) se obtiene el valor de la salida del circuito, en función de la temperatura: Uout ! Rθ Uref R1 Uref R1 Uout =A − − , Rθ + Rlin R1 + R2 R1 + R3 (3.13) despejando Uout de la expresión anterior resulta Uout = Rθ 1 − R1R+R Rθ +Rlin 2 R1 1 + R1 +R3 A Uref , (3.14) y usando que A 1 se obtiene Uout ≈ R3 1+ R1 Rθ R1 − Rθ + Rlin R1 + R2 Uref . (3.15) Ya con el circuito pensado es necesario calcular los valores necesarios de las resistencias y luego calibrarlo para poder tener una relación clara entre el voltaje de la salida y la temperatura a la cual hace referencia. Para esto se necesita que el circuito a 0◦ C entregue un voltaje de 0V en la salida. Viendo el valor de la salida en la ecuación (3.15), de la condición anterior se obtiene que: R0 R1 = . R0 + Rlin R1 + R2 (3.16) Para que lo anterior se cumple se deben cumplir las condiciones siguientes. R1 = R0 , R2 = Rlin . 27 (3.17) CAPÍTULO 3. MEDIDOR DE TEMPERATURA Con esto obtenemos los valores para las primeras cuatro resistencias ya que R1 = R0 = 1kΩ , y que R2 = Rlin = 28kΩ. Estos son los valores esperados para las resistencias pero son valores ideales ya que no se pueden obtener valores tan precisos. Los valores reales que se colocaron para estas resistencias, dado las resistencias que se pueden obtener en el mercado, son: R2 = Rlin = 25, 2kΩ y para R1 se hace una resistencia variable mediante un potenciómetro para poder calibrar con precisión el circuito, obteniendo un valor entre 953 Ω ≤ R1 ≤ 1003 Ω: Con el objetivo de que circule una corriente . 1mA a través del sensor PT1000 (para no calentarlo con la corriente que pasa mediante el efecto joule [7]), se calculo el valor necesario para Uref , el cual se obtiene de la ley Ohm junto con la expresión (3.2). Utilizando los valores ya mencionados se obtiene un valor para el voltaje de referencia de Uref = 1V aproximadamente, el cual se logró utilizando un estabilizador de voltaje modelo LM385Z-1 que genera 1, 24(15)V. Como Uθ es una función lineal con la temperatura, se puede expresar Uθ = R0 + γθ, R0 + Rlin (3.18) donde γ es un factor de proporcionalidad. Combinando (3.15) y (3.18) se obtiene Uout = ! R3 1+ γθ, R1 (3.19) usando una resitencia R3 R1 , la expresión anterior se reduce a Uout ≈ R3 γθ, R1 (3.20) donde se expresa que Uout ∝ R3 . En un principio se utilizó una resistencia de R3 = 575kΩ, pero no fue suficiente para alcanzar la tasa de cambio deseada que era 28 CAPÍTULO 3. MEDIDOR DE TEMPERATURA tener 1V por cada 10◦ C. Faltando un 20 % del voltaje deseando a una temperatura θi , se uso la expresión (3.20) para determinar una variación del voltaje con respecto a R3 ∆Uout ≈ ∆R3 γθi , R1 (3.21) de manera que para ajustar el voltaje también se tiene que aumentar en un 20 % el valor de R3 , obteniéndose R3 = 690kΩ. Esta resistencia fue construida mediante dos resistencias en serie, una de valor fijo 680kΩ más un potenciómetro de 25kΩ, de esta manera se llego a la tasa de cambio deseada. 3.4. Calibración Para poder tener información de la temperatura se busca que el circuito genere 0V a 0◦ C y 10V a 100◦ C por lo que hay que variar los potenciómetros usados en R1 y R3 para poder fijar los parámetros que determinen el rango de voltaje deseado. Para esto fue necesario un punto de referencia confiable para estas temperaturas. Lo primero que se pensó fue usar una mezcla de agua con hielo para poder tener una referencia de 0◦ C y usar agua hirviendo para una referencia de 100◦ C calculando las correcciones provocadas por la presión atmosférica existente. Para hacer esto se construyó una pequeña pieza de Al en cuyo interior se colocó el sensor PT1000 para protegerlo del contacto con el agua. La elección de Al se debe principalmente a que es un buen conductor del calor. Luego de esto se hicieron mediciones con el circuito para 0◦ C introduciendo la pieza de aluminio con el sensor adentro en agua con hielo. Posteriormente se utilizó la misma pieza con el sensor en su interior para una prueba con un calentador de agua que tenı́a un medidor interno de temperatura, el cual fue usado para tomar datos del voltaje y su dependencia con la temperatura. Para comenzar se hizo un primer ajuste para 29 CAPÍTULO 3. MEDIDOR DE TEMPERATURA 8 7 6 Uout /V 5 4 3 2 1 0 0 10 20 30 40 50 60 70 80 90 100 T /◦ C Figura 3.3: Mediciones del circuito para la calibración de Uout con respecto a T . El ajuste lineal de los datos se representa en la linea discontinua, mientras que la linea continua representa el resultado deseado. R1 utilizando la mezcla de agua con hielo, luego de esto se intento calibrar con agua hirviendo el circuito manipulando el potenciómetro de R3 para obtener 10V en la salida, pero la calibración con agua hirviendo no fue posible. Los resultados se muestran en el gráfico de la figura (3.3) y el resultado es una variación no lineal con la temperatura. La no linealidad se explica debido a que el calentador de agua siempre estuvo aportando calor al sistema, lo que era un impedimento para alcanzar el equilibrio térmico. También fue perjudicial la presencia del vapor de agua a alta temperatura que disminuyó el voltaje de referencia del circuito, lo cual afectó en el voltaje de salida. Esto se hace altamente notorio desde los 70◦ C en adelante. Para solucionar los problemas que se generaron en el primer intento de calibración se cambio el calentador de agua; se utilizó un termómetro a base de alcohol 30 CAPÍTULO 3. MEDIDOR DE TEMPERATURA 7 6 Uout /V 5 4 3 2 1 0 0 10 20 30 40 50 60 70 T /◦ C Figura 3.4: Mediciones del circuito para la calibración de Uout con respecto a T . La toma de mediciones se realizo esperando el equilibrio térmico en el sistema. con un error de ±0, 5◦ C como referencia; se utilizó una cubeta para echar el agua con el fin de sacarlo del calentador al momento de medir y se hicieron medidas hasta los 70◦ C para evitar que el vapor de agua afectara al circuito. En este segundo intento se hizo el mismo proceso que en el primero pero con la diferencia de que antes de medir se daba un tiempo para que el sistema alcanzara un equilibrio térmico. Luego de estos cambios se hizo una nueva calibración del circuito y posteriormente una nueva toma de datos que se exponen en el gráfico de la figura (3.4). Se aprecia claramente la linealidad del cambio del voltaje de salida con respecto a la temperatura. Para la medición de voltaje se empleó un multimetro que dentro del rango de medición en el cual fue usado (19, 99V) tiene un error de ±(0, 5 % del valor +1 dı́gito). Con los datos obtenidos se obtiene una relación lineal para el cambio de voltaje en la salida con respecto a la temperatura Uout = aT + b, donde a = 0, 1006(1)V · ◦ C−1 y un valor de b = −0, 047(5)V datos que muestran 31 CAPÍTULO 3. MEDIDOR DE TEMPERATURA la precisión del instrumento construido. 32 Capı́tulo 4 Control de temperatura En este capı́tulo se estudiara la manera en que se estabilizará la temperatura del diodo láser. En láseres comerciales el aumento de temperatura producido por la eficiencia no unitaria del diodo se compensa usualmente con un disipador de calor y con un control de la corriente eléctrica a través del diodo. Mientras ası́ la temperatura del diodo está estable, la intensidad, siendo proporcional a la corriente, puede variar. Para evitar esto, en este trabajo se saca calor del diodo directamente con un elemento Peltier. El flujo de calor de este elemento Peltier se controla con una fuente de corriente eléctrica variable. 4.1. Efecto Peltier Para controlar la temperatura del diodo es necesario generar un flujo de calor que salga de él, ya que la propia potencia que éste genera aumenta la temperatura a través del tiempo de operación. Para esto se hace uso del llamado efecto de Peltier [8]. Suponga dos conductores con densidades de portadores de carga diferentes que se conectan, y corre una corriente eléctrica que va de la zona de alta densidad a la de baja densidad. El gas de electrones que atraviesa la juntura se expande en el 33 CAPÍTULO 4. CONTROL DE TEMPERATURA ∆Q T2 T1 IP Π2 Π1 C1 C2 Figura 4.1: Esquema que representa la unión de dos materiales conductores o semiconductores por los cuales pasa una corriente, generando un flujo de calor. material de baja densidad lo que lleva consigo un enfriamiento en este medio, ver figura (4.1). Este efecto es mas fuerte en el caso de materiales semiconductores que están dopados. La diferencia en el tipo de dopaje también determina el sentido del flujo de calor a través de la unión por lo que se hace sumamente importante conectar el dispositivo que se pretende emplear de la forma correcta, de otra forma se estará realizando el proceso inverso al deseado. Todo lo anterior se resume en Q̇ = (Π2 − Π1 )IP , (4.1) donde Π1 y Π2 son los coeficientes de Peltier de los materiales respectivos, IP es la corriente que pasa a través vez de ellos y Q̇ el flujo de calor a través de la unión. 34 CAPÍTULO 4. CONTROL DE TEMPERATURA 4.2. Fuente de corriente variable Lo primero que hay que desarrollar es un circuito que permita variar la corriente que pasa a través de un elemento Peltier. En el presente trabajo se propone un circuito que genere una relación lineal entre el voltaje de la entrada y la corriente que se pretende controlar. El circuito construido se muestra en la figura (4.2), que permite controlar la corriente que pasa por el elemento Peltier. En en este circuito se puede ver que la corriente solo puede pasar en una sola dirección la cual está determinada por el voltaje aplicado. En equilibrio el Opa por la retroalimentación iguala los voltajes de entrada, por lo que U+ = UP = U− , (4.2) la corriente que corre por el elemento Peltier vendrá dada por: IP = (U− − 0) UP = . R1 R1 (4.3) donde UP es el voltaje de control, IP es la corriente que pasa a través del elemento Peltier y R1 una resistencia que determina la proporcionalidad entre el voltaje aplicado y la corriente. El circuito fue probado para verificar su comportamiento lineal utilizando dos resistencias diferentes para R1 de 1Ω y 4Ω, las cuales determinan la pendiente de las rectas, los resultados se muestran en la figura (4.3). En ambos casos se obtiene una relación lineal dada por IP = aUP + b. Utilizando una resistencia de 1Ω y un 5 % de tolerancia, se obtiene a = 0, 9942(35)A · V−1 y b = 1, 27(18)mA, valores que están dentro del 5 % de tolerancia de la resistencia, y con una resistencia de 4Ω se obtiene a = 0, 2488(10)A · V−1 y b = 0, 308(54)mA. En ambos casos b 6= 0, debido a que se utilizo un opamp modelo OP741 que no es 35 CAPÍTULO 4. CONTROL DE TEMPERATURA +15V Elemento Peltier UP IP + − R1 Figura 4.2: Fuente de corriente variable. En este circuito el voltaje de la salida del opamp LM741 regula la resistencia eléctrica del mosfet IRF740A, por lo que a mayor voltaje de salida del opamp menor es la resistencia del mosfet. Con UP se controla la corriente a través del elemento Peltier. 36 CAPÍTULO 4. CONTROL DE TEMPERATURA 100 80 R1 = 1Ω 60 IP /mA 40 R1 = 4Ω 20 0 0 20 40 60 80 100 UP /mV Figura 4.3: Corriente Peltier como función del voltaje aplicado en el circuito fuente de corriente variable. La secuencia de datos representados por la linea representada por puntos fueron sacados con una resistencia R1 = 1Ω, mientras que los datos representados por las lineas discontinuas fueron sacados con una resistencia R1 = 4Ω. 37 CAPÍTULO 4. CONTROL DE TEMPERATURA Figura 4.4: Comparación del tamaño y superficie entre elemento Peltier y el diodo láser. tan preciso dado que tiene un determinado voltaje “offset”. 4.3. Montaje medidor de temperatura y Elemento Peltier El elemento Peltier no se puede poner en contacto directo con el diodo láser, ya que el diodo tiene poca superficie de contacto, ver figura (4.4). Por esto se diseñó una pieza de aluminio que en su interior llevarı́a sujeto el diodo y en una de sus superficies se colocara el elemento Peltier para el control de temperatura, como muestra la figura (4.6). En la misma pieza de aluminio se colocara cerca del diodo el PT1000 ya mencionado en el capitulo 3 para medir la temperatura del sistema y luego regularla mediante el elemento Peltier. Para disminuir los errores asociados al retardo en el tiempo de la detección del cambio de temperatura en el diodo debido a la conducción térmica del aluminio, se busca que las dimensiones de la pieza sean proporcionales al tamaño del elemento Peltier para mejorar su 38 CAPÍTULO 4. CONTROL DE TEMPERATURA PT1000 Diodo Pieza de aluminio Elemento Peltier Disipador Figura 4.5: Montaje pensado para medir y controlar la temperatura del sistema. Con un termistor PT1000 se mide la temperatura del aluminio y se enfrı́a con un sistema compuesto por un elemento Peltier, junto al aluminio con el diodo en su interior, conectado a un disipador de calor. eficiencia, que tenga un volumen mı́nimo para disminuir su calor especifico y que pueda juntar en lo posible al diodo con el PT1000. El montaje se muestra en la figura (4.5), en el se muestra que el elemento Peltier está conectado con la pieza de aluminio por un lado y por el otro está conectado a un disipador de calor. La pieza tiene una ranura que mediante un tornillo, sera usada para apretar el diodo y ası́ dejarlo sin movimiento dando estabilidad al sistema. En la figura (4.7) se muestra la pieza de aluminio implementada en el montaje óptico con los elementos en su interior. 4.4. Modelo de conducción térmica Para obtener una estimación del tiempo en que tarda en transmitirse la información sobre la temperatura a la cual se encuentra el diodo se usará un modelo 39 CAPÍTULO 4. CONTROL DE TEMPERATURA 12,0 1,0 6,0 10,0 =2,8 =5,0 12,5 25,0 12,0 10,0 Diodo Aluminio Figura 4.6: Pieza de aluminio fabricada, todo medido en mm. Arriba: vista a lo largo, donde se ve un agujero para el PT1000 y otro para el diodo; abajo: vista lateral, mostrando la cavidad donde entra el diodo. 40 CAPÍTULO 4. CONTROL DE TEMPERATURA Figura 4.7: Controlador de temperatura. Se muestra el circuito medidor de temperatura instalado sobre el disipador de calor, con el termistor PT1000 en el interior de la pieza de aluminio cercano al diodo. La pieza de aluminio se encuentra sobre el elemento Peltier. 41 CAPÍTULO 4. CONTROL DE TEMPERATURA A Aluminio Diodo P eltier 0 L z ∆T Figura 4.8: Modelo de conducción del calor en un bloque de aluminio. de conducción de calor, el cual esta dado por la ecuación cp (~r)ρ(~r) ∂T (~r, t) ~ · [λ(~r)∇T ~ (~r, t)] , = Ṗ (~r, t) + ∇ ∂t (4.4) donde cp (~r) es calor especifico, ρ(~r) es la densidad de masa, λ(~r) es la conductividad térmica, P es la densidad potencia que se entrega o se disipa del sistema y T es la temperatura. Lo que se desea saber es cuanto tiempo toma para que el diodo llegue a una temperatura estable, debido a la potencia entregada por el diodo PD y por la potencia disipada por el elemento Peltier PP . Para esto se uso un modelo simplificado de conducción térmica en una sola dirección espacial, como se muestra en la figura (4.8). De esta forma la ecuación (4.4) se reduce a la forma más simple cAl ρAl ∂ 2 T (z, t) PD δ(z) − PP δ(z − L) ∂T (z, t) = λAl + , ∂t ∂z 2 A 42 (4.5) CAPÍTULO 4. CONTROL DE TEMPERATURA donde cAl , ρAl y λAl corresponden a valores del aluminio. Se propone el cambio de temperatura T (z, t) → T (z, t) + ∆T (z, t) , (4.6) donde T (z, t) ya es solución de (4.5), para calcular el cambio de temperatura dado un cambio en la potencia del diodo láser PD → PD + ∆PD , (4.7) con potencia PP constante. Dado que queremos saber cuando la temperatura se estabiliza suponemos que PD representa la potencia que genera el diodo en un sistema en equilibrio térmico y ∆PD representa un cambio en la potencia del diodo. En esta transformación también se supone que T (z, t) es la solución cuando PD y PP se encuentran en equilibrio. Reemplazando (4.7) y (4.6) en (4.5) se obtiene: cAl ρAl ∂ 2 T (z, t) ∂ 2 ∆T (z, t) = λAl + ∂z 2 ∂z 2 PD δ(z) − PP δ(z − L) ∆PD δ(z) + + . A A ∂T (z, t) ∂∆T (z, t) + ∂t ∂t (4.8) La ecuación anterior se puede separar en dos partes, una parte para T (z, t) y otra para el cambio de temperatura ∆T . De esta manera ∆T representa un cambio fuera del equilibrio térmico dado por el cambio en la potencia que entrega el diodo ∆PD . Restando (4.5) a (4.8) se llega a la ecuación de movimiento ∂ 2 ∆T (z, t) a∆PD δ(z) ∂∆T (z, t) −a = 2 ∂t ∂z λAl A 43 (4.9) CAPÍTULO 4. CONTROL DE TEMPERATURA donde a es: a= λAl . cAl ρAl (4.10) Se supone que la solución homogénea de la ecuación (4.9) esta incluida en T (z, t). Ası́ queda obtener la solución particular, por lo que es necesario obtener la función de Green definida por ∂G(z, t) ∂ 2 G(z, t) −a = δ(z)δ(t) . ∂t ∂z 2 (4.11) Usando la transformada de Fourier se hace un cambio de variables en la ecuación que permite simplificar su desarrollo G(z, t) = 1 2π ZZ G(k, ω)e−iωt e−ikz dω dk . (4.12) Luego de esto la ecuación (4.11) se transforma en 1 . 2π (4.13) , (4.14) −iωG(k, ω) + k 2 aG(k, ω) = Despejando G de (4.13) se obtiene G(k, ω) = 1 2π(ak 2 − iω) y luego reemplazando (4.14) en (4.12) se obtiene la función de Green en las variables originales: G(z, t) = − √ 44 −z 2 1 e 4at . 4πat (4.15) CAPÍTULO 4. CONTROL DE TEMPERATURA Para obtener la solución final de (4.9) se hace uso de la función de Green mediante la expresión ∆T (z, t) = Z +∞ −∞ Z t −∞ G(z − z 0 , t − t0 ) a∆PD δ(z 0 ) 0 0 dz dt , λAl A (4.16) cuyo desarrollo genera: ∆T (z, t) = a λAl A Z t −∞ −z 2 ∆PD (t0 )e 4a(t−t0 ) 0 p dt . 4πa(t − t0 ) (4.17) La solución depende del comportamiento que tenga ∆PD con respecto al tiempo. Pensando en el caso en que el diodo aumenta su intensidad de luz, se estudiar el cambio de la temperatura de equilibrio, mediante la función Heaviside ∆PD (t0 ) = ∆P0 Θ(t0 ). (4.18) Esto quiere decir que en un momento determinado el diodo empieza a entregar un aumento de calor al sistema, ∆Q = ∆PD · t, lo que hace que el sistema aumente su temperatura constantemente debido a que ∆T ∝ ∆Q. Reemplazando (4.18) en (4.17) da la expresión a∆P0 Θ(t) √ ∆T (z, t) = λAl A 4πa Z 0 t −z 2 e 4a(t−t0 ) 0 √ dt . t − t0 (4.19) Para simplificar la integral se hace el siguiente cambio de variables: x2 = z2 , 4a(t − t0 ) 45 (4.20) CAPÍTULO 4. CONTROL DE TEMPERATURA de esta manera la ecuación (4.19) queda como ∆P0 Θ(t)z √ ∆T (z, t) = 2λAl A π Z ∞ √z 4at 2 e−x dx . x2 (4.21) Desarrollando por partes la integral contenida en la expresión (4.21) Z ∞ √z 4at 2 e−x e−x dx = − x2 x 2 ∞ Z ∞ 2 + e−x dx , z z √ √ 4at (4.22) 4at y reemplazando (4.22) en (4.21), se obtiene ∆P0 Θ(t)z √ ∆T (z, t) = 2λAl A π "√ 4at −z2 √ e 4at + π 1 − erf z z √ 4at !# . (4.23) Para estudiar el comportamiento de ∆T de una manera más simple, se considera el tiempo a dimensional τ que viene definido por: τ= at , z2 (4.24) ∆P0 z , λAl A (4.25) y considerando la constante T0 como: T0 (z) = se obtiene una expresión mas sencilla para ∆T . "r ∆T (z, τ ) = T0 (z) τ −1 1 e 4τ + 1 − erf π 2 1 √ 2 τ !# Θ(τ ) (4.26) En el gráfico de la figura (4.9) se muestra la función de la expresión (4.26) que representa la conducción del calor en el aluminio, para estudiar su comportamiento. 46 CAPÍTULO 4. CONTROL DE TEMPERATURA 4 3.5 3 2.5 ∆T /T0 (z) 2 1.5 1 0.5 0 −0.5 0 5 10 15 20 25 30 35 40 τ Figura 4.9: Gráfico de ∆T /T0 como función de τ . Esta solución es divergente siendo lo que se esperaba ya que si se entrega continuamente calor al sistema, la temperatura nunca deja de subir. Por lo tanto, es mejor pensar en el proceso de prender el diodo por un determinado tiempo lo que producirá una cantidad de calor finita entregada al sistema. Con esto se llegarı́a a un nuevo equilibrio térmico. Esto se puede modelar con la función Heaviside nuevamente: ∆PD (t0 ) = ∆P0 [Θ(t0 ) − Θ(t0 − ∆t)]. (4.27) Representa el proceso de encender el diodo por algún tiempo ∆t y luego apagarlo, ver figura (4.10). Utilizando el resultado obtenido en la expresión (4.26) la solución general usando la potencia (4.27) es: 47 CAPÍTULO 4. CONTROL DE TEMPERATURA ∆PD ∆P0 ∆Q t t=0 ∆t Figura 4.10: Función ∆PD (t0 ) = ∆P0 [Θ(t0 ) − Θ(t0 − ∆t)] que representa el diodo emitiendo luz en un tiempo ∆t. El calor entregado al sistema se representa como el área bajo la curva. 48 CAPÍTULO 4. CONTROL DE TEMPERATURA 3 2.5 2 ∆T /T0 (z) 1.5 1 0.5 0 −0.5 0 5 10 15 20 25 30 35 40 τ Figura 4.11: Gráfico de ∆T /T0 como función de τ , para el caso en que el cambio de potencia está definido como ∆PD (t0 ) = ∆P0 [Θ(t0 ) − Θ(t0 − ∆t)]. "r ∆T (z, τ ) = T0 (z) "r −T0 (z) τ −1 1 e 4τ + 1 − erf π 2 1 √ 2 τ !# −1 τ − ∆τ (z) 4(τ −∆τ 1 (z)) + e 1 − erf π 2 Θ(τ ) (4.28) 1 p 2 τ − ∆τ (z) ! !# Θ(τ − ∆τ (z)). En el gráfico de la figura (4.11) se muestra la función de la expresión (4.28) para ∆τ = 20, donde se observa que el cambio de temperatura aumenta hasta que se apaga el diodo, luego decae acercándose lentamente a cero. Para poner a prueba la efectividad del modelo se utilizó un sencillo experimento en el laboratorio donde se utilizo el elemento Peltier, el diodo láser y el sistema de control de temperatura. En este experimento se hizo circular una corriente de 5mA a través del elemento Peltier, para contrastar el calor entregado al sistema por el ambiente. Luego de que el sistema alcanzo el equilibrio a los 14, 7◦ C según el medidor de temperatura construido, se conectó el diodo mediante un switch a 49 CAPÍTULO 4. CONTROL DE TEMPERATURA 3 2.5 2 ∆T /◦ C 1.5 1 0.5 0 −0.5 0 5 10 15 20 25 30 35 40 t/ mı́n Figura 4.12: Gráfico de medición de ∆T en función del tiempo medido en minutos, usando el controlador de temperatura. una pila de 6V mediante resistencias en serie para limitar la corriente que pasa a través de él. Al prenderlo empezó a aumentar la temperatura, luego de 20 mı́n se apagó el diodo y se siguieron tomando datos hasta ver que la variación en la temperatura fuera mı́nima. El resultado del experimento se muestra en el gráfico de la figura (4.12). El resultado es bastante similar al esperado según el modelo desarrollado. Para poder superponer el modelo con los datos obtenidos se usó la expresión (4.28) deshaciendo la variable a dimensional τ , ver ecuación (4.24), para que ∆T esté en función del tiempo, y se uso los valores que aparecen en la tabla (4.1). Como en este caso no se conoce la sección transversal eficaz A de la pieza de aluminio creada, T0 queda como parámetro libre para hacer un ajuste de la función. El valor obtenido para T0 que mejor ajusta la curva a los datos es T0 = 0,75◦ C. De esta manera se juntó en el mismo gráfico, los datos obtenidos en el experimento 50 CAPÍTULO 4. CONTROL DE TEMPERATURA constantes ρAl cAl λAl z valores 2698, 4kg · m−3 900J · K−1 · kg−1 237W · K−1 · m−1 1, 08mm Cuadro 4.1: tabla de valores utilizados para el aluminio, donde z es la distancia entre el elemento Peltier y el diodo. 3 2.5 2 ∆T /◦ C 1.5 1 0.5 0 −0.5 0 5 10 15 20 25 30 35 40 t/ mı́n Figura 4.13: Datos obtenidos en el laboratorio juntó con el modelo teórico desarrollado para ∆T . con el modelo teórico de conducción, obteniéndose el gráfico de la figura (4.13). Dentro de los 40 minutos de medición el ambiente cambio su temperatura debido al calor que entregábamos las personas que estábamos haciendo las mediciones en la sala. Se piensa que el modelo y los datos obtenidos después de los 35 minutos de medición comienzan a comportarse de manera distinta, ya que el ambiente y el elemento Peltier llegaron a un nuevo equilibrio. El experimento no es capaz de recrear las condiciones ideales en que se generó el modelo, pero se ve que el modelo se ajusta bastante bien a los datos obtenidos en el experimento, por lo cual puede 51 CAPÍTULO 4. CONTROL DE TEMPERATURA ser considerado para posteriores cálculos sobre el tiempo en que tarda en responder el sistema para llegar a un nuevo equilibrio térmico. 52 Capı́tulo 5 Conclusiones Se logro construir un circuito capaz de medir temperatura, con el fin de medir la temperatura de un diodo láser en una configuración óptica. Al no poder poner en contacto el medidor con el diodo se construyó una pieza de aluminio en donde el medidor y el diodo están contenidos. Por esto aun falta calcular el tiempo en que el aluminio y el diodo llegan a un equilibrio térmico para poder ajustar el tiempo en que el circuito pueda responder de manera precisa a los cambios de temperatura. Para poder regular la temperatura del diodo láser se construyo un circuito que mediante un elemento Peltier quita calor del aluminio, en donde está contenido el diodo, regulando la temperatura del conjunto. Al igual que en el caso del medidor, falta calcular el tiempo de respuesta del circuito para poder regular la temperatura. Para lograr una estimación del tiempo que se demora el aluminio con el diodo en su interior en alcanzar un equilibrio térmico se desarrolló un modelo de conducción del calor que se ajusta bastante bien a los datos obtenidos en el experimento hecho, por lo cual puede ser considerado para posteriores cálculos sobre el tiempo en que tarda en responder el sistema para llegar a un nuevo equilibrio térmico. Como trabajo a futuro se desea construir e integrar un circuito PID para ajustar 53 CAPÍTULO 5. CONCLUSIONES el control automático del circuito y armar una caja de aluminio con la electrónica en su interior para su uso en el laboratorio. Con toda la electrónica lista y funcionando, se pretende estudiar como varia la frecuencia del láser con la temperatura para poder comparar con lo que se expuso en la teorı́a. 54 Bibliografı́a [1] M. Sargent, M. Scully, and W. LAMB, Laser physics (Addison-Wesley, Arizona, 1987), 5th edition. [2] O. Svelto, Principles of Laser, (Plenum Press, Milan, 1982), 2nd edition. [3] N. Aschcroft and D. Mermin, Solid state physics (Harcourt, Orlando, 1976). [4] A.S. Arnold, J.S. Wilson, and M.G. Boshier, Rev. Sci. Instrum. 69, 1236 (1998); L. Ricci, M. Weidemuller, T. Esslinger, A. Hemmerich, C. Zimmermann, V. Vuletic, W. Konig, and T.W. Hansch, Opt. Commun. 117, 541 (1995); T. Hof, D. Fick, and H.J. Jansch, Opt. Commun. 124, 283 (1996). [5] E. Hecht and A. Zajac, Optics (Addison-Wesley, Canada, 1974). [6] U. Tietze, C. Schenk, and E. Gamm, Electronic circuits (Springer, Erlangen, 2002), 2nd edition. [7] W.F. Magie, Principles of Physics: Designed for Use as a Textbook of General Physics (The Century Co., New York, 1911), p. 508. [8] B. Callen, Thermodynamics and an introduction to thermostatistics (Herbert, 1985). 55