diseño sísmico basado en la performance estado actual
Anuncio

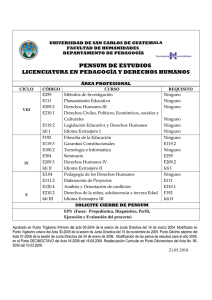
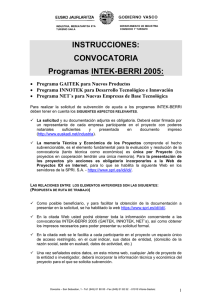
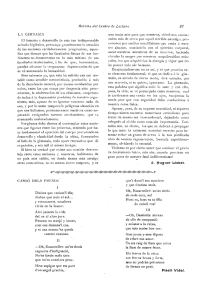
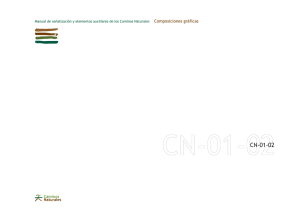
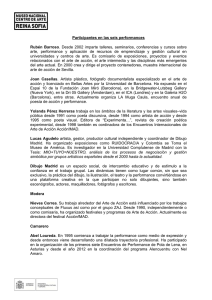
DISEÑO SÍSMICO BASADO EN LA PERFORMANCE ESTADO ACTUAL Dr. Ing. Raul D. Bertero (UBA – UTN FRGP) RESUMEN Los objetivos principales del presente trabajo son: (i) hacer un breve repaso de las definiciones de “Ingeniería basada en la Performance” (“Performance-based Engineering”, PBE), “Ingeniería Sísmica basada en la Performance”, (“Performance-based Seismic Engineering”, PBSE) y “Diseño sísmico basado en la Performance”, (“Performance-based Seismic Design”, PBSD); y (ii) analizar los requisitos principales necesarios para alcanzar un PBSD confiable haciendo un análisis crítico de las razones por las cuales algunos enfoques propuestos no logran satisfacer estos requisitos. ABSTRACT The main objectives of this paper are: (i) To review briefly what is understood by Performance-Based Engineering, Performance-Based Seismic Engineering, and Performance-Based Seismic Design; and (ii) To discuss the main requirements that a reliable Performance-Based Seismic Design should satisfy and why some approaches that have been proposed fail in satisfying those requirements. 1. INTRODUCCIÓN Una revisión de las lecciones aprendidas a partir de los daños ocasionados por terremotos que han ocurrido recientemente ha llevado a la conclusión que los riesgos sísmicos en las áreas urbanas se han incrementado en lugar de disminuir. Una manera efectiva de revertir esta situación en futuros terremotos es mediante: (i) el desarrollo de mas confiables estándares sísmicos y provisiones reglamentarias que las existentes en la actualidad y, (ii) su estricta implementación para la ingeniería y construcción tanto de nuevas instalaciones como en la evaluación de la vulnerabilidad y en la readecuación sísmica de instalaciones existentes peligrosas. Un enfoque integral para el desarrollo y la implementación de la próxima generación de reglamentos debe incluir en su consideración todos los aspectos involucrados en la ingeniería de instalaciones resistentes a terremotos. Estos aspectos incluyen no solo aquellos concernientes al diseño conceptual y numérico, sino también al detallado estructural, la construcción y el monitoreo de la ocupación (función) y mantenimiento de toda la instalación (o sistema). Para facilitar la estricta implementación de los reglamentos para el diseño sísmico de una instalación nueva o existente, las técnicas y estrategias incluidas en estos reglamentos deberían ser lo suficientemente simples como para que puedan ser aplicadas efectivamente teniendo en cuenta el nivel de los conocimientos de los profesionales involucrados (diseñadores, funcionarios públicos, constructores, inspectores, etc.) así como también de los propietarios. Sin embargo, la simplicidad no debe comprometer la confiabilidad del diseño resultante. Para lograr estos objetivos se pueden considerar las siguientes dos alternativas: (a) mejorar de forma gradual la confiabilidad del procedimiento simplificado requerido por la reglamentación siguiendo el progreso en el nivel de conocimientos de los profesionales involucrados o, (b) introducir cambios radicales en los reglamentos actuales imponiendo el procedimiento más confiable que se pueda desarrollar de acuerdo al estado del arte de la ingeniería sísmica. Las dos alternativas mencionadas no son completamente independientes debido a que, incluso si la primera alternativa es adoptada, debe determinarse la confiabilidad del procedimiento simplificado. Por lo tanto es evidente que cualquiera sea la alternativa elegida es necesario desarrollar la metodología que pueda considerarse más transparente y confiable de acuerdo con el estado actual del conocimiento. El enfoque más promisorio para desarrollar esa metodología es mediante la utilización de la llamada “Ingeniería basada en la Performance” (PBE, Performance-based Engineering). Su aplicación al caso en que los riesgos sísmicos resultan predominantes es conocida como “Ingeniería Sísmica basada en la Performance” (PBSE) [1, 15]. Por su parte, una fase fundamental de la PBSE es el “Diseño Sísmico basado en la Performance” (PBSD). 2. OBJETIVOS DEL TRABAJO Reconociendo el hecho de que para una aplicación confiable de la PBSE los reglamentos deben permanecer simples pero confiables, así como también ajustados al nivel de conocimiento de los profesionales encargados del diseño, el siguiente desarrollo en tres pasos podría ser implementado para la formulación final de un reglamento sísmico simple: • Primer paso: A partir del estado actual del conocimiento en ingeniería sísmica debería desarrollarse un “reglamento conceptual basado en la performance” que cubra todos los aspectos que un reglamento sísmico debería regular. • Segundo paso: El reglamento conceptual desarrollado en el paso anterior debería aplicarse al diseño de edificios con diferentes configuraciones (regulares e irregulares), sistemas y lay-outs estructurales. Preferentemente estos edificios deberían ser similares a aquellos que han sido diseñados y construidos de acuerdo a los reglamentos actuales y cuya respuesta a movimientos sísmicos hayan sido registrados. • Tercer paso: A partir del análisis de los resultados obtenidos en el paso anterior debe desarrollarse un reglamento conceptual basado en la performance simplificado de manera que pueda ser aplicado correctamente por los profesionales. Este reglamento debería especificar en forma clara todas las restricciones en relación con la selección del sitio de emplazamiento, de la configuración y geometría del edificio, del sistema de fundación y del sistema estructural para los cuales puede utilizarse el reglamento simplificado. Para edificios más complejos debería utilizarse el reglamento conceptual desarrollado en el primer paso e implementarse una revisión independiente obligatoria del diseño. El objetivo de este trabajo es cubrir el primer paso de un programa racional para el desarrollo de un reglamento sísmico basado en la performance simple pero confiable. En particular los objetivos principales son: (i) hacer un breve repaso de las definiciones de PBE, PBSE y PBSD, y (ii) analizar los requisitos principales necesarios para alcanzar un PBSD confiable y porqué algunos enfoques propuestos no logran satisfacer estos requisitos. 3. DEFINICIONES DE PBE, PBSE Y PBSD PBE es definido como la selección del criterio de diseño, los sistemas estructurales, layout, dimensionamiento, y detallado de una estructura y sus componentes y contenidos no estructurales, la garantía y control de la calidad de la construcción y su mantenimiento a largo plazo, de modo que para niveles especificados de las acciones que pueden actuar sobre el edificio y con niveles definidos de confiabilidad, el edificio o instalación no sea dañando mas allá de ciertos estados límites. PBE es un proceso que comienza con los primeros conceptos del proyecto y continúa a través de toda la vida útil del edificio. PBSE es definido como la aplicación de PBE a aquellos casos en los que los riesgos sísmicos son predominantes para el diseño. Por lo tanto, PBSE involucra el desarrollo del diseño, construcción y mantenimiento de modo que los edificios resistan movimientos sísmicos de diferentes intensidades con niveles de daño especificados. PBSD es el subconjunto de actividades del PBSE que corresponden al proceso de diseño. Por lo tanto, el mismo incluye la identificación de los riesgos sísmicos, la selección de los niveles de performance y objetivos de diseño, la evaluación de la adecuación del sitio de emplazamiento, el diseño conceptual, el diseño numérico preliminar, el diseño final, las verificaciones de la aceptabilidad del diseño, la revisión del diseño, y la especificación de los procedimientos de garantía de calidad a ser desarrollados durante la construcción y el monitoreo a lo largo de la vida útil del edificio. En este contexto, el término “diseño” se aplica al edificio completo incluyendo la fundación, los componentes no estructurales, sus contenidos, y el equipamiento y las instalaciones. 4. OBJETIVOS DE PERFORMANCE (OP) En el marco conceptual de PBSE que ha sido desarrollado [1] el primer paso es la selección de los objetivos de performance (OP). Estos objetivos son expresados en términos de los niveles de daños esperados para determinados niveles de movimientos sísmicos [1]. El cliente hace esta selección en conjunto con el diseñador tomando en consideración sus propias expectativas, la sismicidad del sitio de emplazamiento, análisis económicos y el riesgo aceptable. Los objetivos de performance pueden ir desde los requerimientos mínimos reglamentarios (usualmente basados en que la instalación continúe operacional bajo movimientos sísmicos menores y que la vida de las personas no corra peligro bajo movimientos sísmicos de ocurrencia excepcional) hasta el requerimiento de la continuidad operacional de la instalación para el máximo movimiento sísmico que potencialmente pudiera ocurrir en el sitio de emplazamiento. MAGNITUD DEL SISMO DE DISEÑO NIVEL DE PERFORMANCE SISMICA Servicio Operacional Seguridad Pre-colapso Frecuente (20 años) OB Ocasional (70 años) Raro (500 años) Muy raro (1000 años) IN IN ST ST AL AL AC AC IO IO NE NE S JE S Performance inaceptable (para construcción nueva) TIV ES CR IT OS EN IC CI AS BA AL SI CO ES S Figura 1 Un objetivo de performance es la intersección de un determinado nivel de performance con un determinado nivel de intensidad sísmica. Un nivel de performance representa una banda dentro del espectro de los posibles daños que pueden sufrir los diferentes contenidos y componentes estructurales o no estructurales, considerando las consecuencias de dichos daños sobre los ocupantes y el mantenimiento de las funciones de la instalación. En la referencia [1] se identifican cuatro niveles de performance (Figura 1) y se incluyen tablas en los que dichos niveles se definen en función de los diferentes componentes del edificio. El riesgo sísmico en un determinado sitio es representado por un conjunto de movimientos sísmicos con una probabilidad de ocurrencia especificada. Por ejemplo, el término movimiento sísmico “raro” se refiere a un conjunto de movimientos sísmicos potenciales capaces de producir un definido nivel de daños con una frecuencia anual especificada (por ejemplo, un período de recurrencia de 475 años para instalaciones convencionales). El conjunto de movimientos sísmicos esperable en las fundaciones de la estructura no solo varía de acuerdo a las distintas regiones sísmicas sino también entre diferentes sitios dentro de esas regiones debido a las variaciones locales en las condiciones topográficas y en los perfiles de suelo. Los cuatro niveles mínimos de movimientos sísmicos correspondientes a los cuatro niveles de performance identificados en la Figura 1 han sido seleccionados en forma arbitraria para una instalación en California (USA). Nótese que el período de recurrencia, TR , y la probabilidad de excedencia en N años, pN , son dos maneras diferentes de expresar el mismo concepto y que ambos están relacionadas por las siguiente ecuaciones 1 N p1 = pN = 1 − (1 − p1 ) TR donde p1 es la probabilidad de excedencia anual. Estas ecuaciones son válidas asumiendo que la ocurrencia de los terremotos son eventos independientes. Si bien esto no es estrictamente correcto, las ecuaciones precedentes son ampliamente utilizadas para simplificar el análisis probabilístico. En general, los objetivos de performance (OP) incluyen metas múltiples: por ejemplo, que la instalación continúe completamente operacional para un evento con una recurrencia de 43 años, que asegure la vida de las personas para un evento con una recurrencia de 475 años, y que no colapse para un movimiento sísmico con una recurrencia de 970 años. La selección de los objetivos de performance fija los criterios de aceptabilidad del diseño. Los niveles de performance son la clave para limitar los valores de ciertos parámetros medibles de la respuesta estructural tales como los desplazamientos máximos, la ductilidad (monótona o acumulativa), el índice de daño (DM), el índice de distorsión de entrepisos (IDI), y las derivadas de los desplazamientos como la velocidad, la aceleración e incluso el jerk (en el caso de pequeños movimientos sísmicos frecuentes). Una vez que los niveles de performance son seleccionados, (1) los valores limitantes asociados se transforman en los criterios de aceptabilidad a ser verificados en las etapas posteriores del diseño. Se debe notar que una vez seleccionado el valor límite de un parámetro para un determinado nivel de riesgo sísmico, para definir completamente el criterio de diseño, es todavía necesario definir con que probabilidad es aceptable traspasar ese límite (probabilidad de falla). Un ejemplo de la cuantificación de los OP para controlar los daños estructurales, no estructurales y de contenidos se muestra en la Tabla 1. Probability of Limit State Exceedence in 50 years Exceedence Probability 1 Fully Operational Des Non-acceptable Design Zone Operational Performance Objective Curve Des 0.1 Acceptable Design Zone Life Safety Near Collapse 0.01 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 Interstory Drift Index Figura 2. El diseño A realizado para satisfacer solamente el objetivo de diseño “Life Safety” no verifica el objetivo de diseño “fully operational”. El diseño B que considera inicialmente ambos objetivos de diseño tiene, en cambio, un comportamiento satisfactorio en todos los casos. Los OP también pueden ser representados como una curva en el “espacio de performance” [2] como se muestra en la Figura 2 para los daños no estructurales definidos en la Tabla 1. En el eje vertical se muestra en escala logarítmica la probabilidad de exceder un objetivo de performance particular en la vida útil de la instalación (en este caso 50 años). Esta probabilidad tiene en cuenta la probabilidad de ocurrencia de movimientos sísmicos (de acuerdo con su período de recurrencia) combinada con la probabilidad de falla aceptable cuando estos movimientos sísmicos ocurren. El eje horizontal corresponde a una medida de la respuesta estructural (en este caso el índice de distorsión de entrepisos, IDI). Los OP de la Figura 1 son, en realidad, la representación discreta de la curva continua de objetivos de performance de la Figura 2. Tabla 1. Ejemplo de cuantificación de los Objetivos de Performance Nivel Sísmico Daño estrctural Indice Período de de recurrencia daño (años) local DM Daño No- Daño a estructural contenidos Prob. IDI de falla condicional los Prob. de falla condicional . Aceleración de píso Prob. de falla condicional Completamente Operacional 43 0.20 40% 0.003 40% 0.6 g 40% Operacional 75 0.40 30% 0.006 30% 0.9 g 30% de 475 0.60 25% 0.015 25% 1.2 g 25% Colapso inminente 970 0.80 20% 0.020 20% 1.5 g 20% Seguridad Vidas 5. REQUISITOS PARA UNA METODOLOGÍA DE DISEÑO BASADA EN LA PERFORMANCE CONFIABLE 5.1 La necesidad de un diseño sísmico para niveles múltiples Durante el terremoto de San Fernando (California, USA) de 1971 (magnitud MW = 6.7) el centro médico Olive View en Sylmar (California), inaugurado unos pocos meses antes, fue casi completamente destruido. El hospital fue rediseñado en 1976 y reconstruido utilizando tabiques de hormigón armado y de acero en el perímetro del edificio. Durante el terremoto de Northridge de 1994 (magnitud MW = 6.7), el nuevo edificio resistió aceleraciones que alcanzaron los 2.8g en el piso superior sin ningún daño estructural significativo. Sin embargo, el hospital tuvo que ser completamente evacuado y estuvo varios días fuera de funcionamiento debido a la rotura de sprinklers y cañerías de agua [3]. Este ejemplo demuestra claramente que el diseño para un objetivo de performance de “seguridad de vidas” en un movimiento sísmico de gran intensidad y ocurrencia rara no implica necesariamente que las instalaciones estarán completamente operacionales luego de un movimiento sísmico mas frecuente de menor intensidad. Esta situación se puede graficar en el “espacio de performance” de la Figura 2(b), donde se encuentran dibujadas dos curvas de diseño típicas. El diseño A, realizado para cumplir solamente con el objetivo de performance de “seguridad de vidas”, no satisface los objetivos de performance “operacionales”. Por otro lado, el diseño B, que desde su comienzo ha tenido dentro de sus objetivos de performance tanto los objetivos “operacionales” como el de “seguridad de vidas”, se encuentra completamente dentro de la zona de aceptación. Si se considera el nivel de las pérdidas económicas por daños directos durante terremotos recientes [Loma Prieta 1989 (7,000 millones de U$S); Northridge 1994 (30,000 millones de U$S), Kobe 1995 (200,000 millones de U$S)], resulta claro que una cantidad tan grande de pérdidas en estos eventos de ocurrencia relativamente frecuente es inaceptable y el enfoque actual de los reglamentos que focaliza solamente en el objetivo de performance de “seguridad de vidas” no es suficiente. Seismic Yielding Coefficient, C y 1.6 TR = 72 years ξ = 2 % µ = 1 1.4 Serviceable a 1.2 TR = 20 years ξ = 2 % µ = 1 1.0 Serviceable b 0.8 TR = 500 years ξ = 5 % 0.6 µ =3 Life Safety 0.4 0.2 0.0 0.0 0.5 1.0 1.5 2.0 2.5 3.0 Period, T(s) Figura 3 Además es muy importante que el diseñador reconozca desde un principio las implicancias de la selección de los objetivos de performance. Por ejemplo, el espectro de diseño de fuerzas para suelo firme en San Francisco (U.S.A.) de la Figura 3 ha sido obtenido utilizando el espectro de diseño de Newmark-Hall [4], con la máxima aceleración horizontal correspondiente a períodos de recurrencia de 20, 72 y 500 años [5], y el factor de reducción de resistencias por ductilidad propuesto por Miranda [6]. Resulta claro del análisis de la Figura 3 que si se requiere el cumplimiento del estado limite de servicio para un período de recurrencia de 72 años (como ha sido propuesto para proyectos situados en zonas de alto riesgo sísmico en California) o aún para períodos de recurrencia de 43 o 20 años, no solo el estado límite de servicio controlará el diseño sino que métodos innovadores de diseño (aislación de base, amortiguadores, etc.) deberán ser utilizados para satisfacer los objetivos de performance en forma económica. A partir de los ejemplos mostrados en las Figuras 2 y 3, resulta claro que se deben considerar por lo menos dos niveles de performance (inclusive para el diseño preliminar) de modo de poder tomar las decisiones de diseño adecuadas para satisfacer los objetivos de performance. La información actualmente disponible para cuantificar los requerimientos para todos los niveles de performance es todavía insuficiente. Particularmente es necesario contar con datos confiables (y por lo tanto estudios) en relación con los efectos de la interacción entre aceleraciones y distorsión de los entrepisos en el daño de componentes no estructurales y cañerías, así como también en el nivel de daños a los contenidos asociados a los niveles de aceleración de los entrepisos. 5.2 La necesidad de una metodología de diseño probabilística Para guiarse en el desarrollo de un método de diseño probabilístico es necesario revisar las incertidumbres de las diferentes variables involucradas en el problema sísmico. Los valores medios, los coeficientes de variación (COV) y las distribuciones de probabilidad de las resistencia estructural han sido determinados a partir de ensayos de materiales y estructuras, de ensayos en escala uno a uno bajo condiciones idealizadas, y en algunos casos, cuando un modelo analítico claramente definido existe, a través de simulación de Monte Carlo. En la Referencia [8] se puede encontrar un muestreo representativo de estos datos, el cual resume los resultados de numerosos programas de investigación. Los COV de las resistencias de estructuras de acero y hormigón armado varían entre 0.11 y 0.19 dependiendo del material y el modo de falla. Muchos menos datos existen sobre los COV de la capacidad de desplazamiento de los elementos estructurales. Los datos experimentales disponibles muestran usualmente una mayor dispersión en los desplazamientos últimos que en la resistencia última y, por lo tanto, un COV ligeramente mayor que 0.2 podría ser esperado en general para las capacidades de desplazamiento y de rotación plástica de los elementos estructurales. Por otra parte, los estudios sísmico [9] indican que el COV de la aceleración máxima del suelo (PGA) depende del sitio de emplazamiento y puede variar entre 0.56 y 1.38. El COV de la demanda depende no solamente de la incertidumbre en el PGA, pero también de las incertidumbres en las características dinámicas del movimiento sísmico y de la estructura. Por ejemplo, el COV de la demanda de resistencia normalizada por la PGA para distintos registros sísmicos ha sido calculado por Miranda [6]. Si bien lo valores obtenidos por Miranda dependen del período, un COV de alrededor de 0.60 podría ser utilizado para un amplio rango de períodos. Combinando un coeficiente de variación de 0.56 en la PGA con un COV de 0.60 en la demanda de resistencia para un PGA dado, un COV de alrededor de 0.80 es obtenido para la demanda de resistencia. Por lo tanto, un coeficiente de variación igual a 0.80 podría ser utilizado para representar la dispersión en las demandas de resistencia y, análogamente, para las demandas de rotación en las articulaciones plásticas, de distorsiones de entrepiso y de daño local. Teniendo en cuenta que puede esperarse un COV de alrededor de 0.20 para las capacidades y un COV de alrededor de 0.80 para la demanda sísmica, es posible utilizar un procedimiento probabilístico simple para el diseño. Este procedimiento simple se basa en el hecho de que debido a las incertidumbres dominantes en la demanda es posible considerar todas las variables aleatorias como determinísticas (e iguales a su valor medio) con excepción de la demanda sísmica. De allí que las ecuaciones de diseño correspondientes a la capacidad media de cada parámetro X, C x (donde X es cualquier parámetro de diseño tal como la resistencia de fluencia Cy, el índice de distorsión de los entrepisos IDI, el índice de daño DM, etc.) se pueden plantear a través del uso de factores de carga de diseño utilizando [11] C x ≥ Dx (1 + β COVDx ) = Dx + β σ Dx (2) donde Dx = demanda media para el parámetro de diseño X, σ Dx = Dx COVDx es el desvío estándar de la demanda para el parámetro de diseño X, y β es un parámetro utilizado para medir la probabilidad de falla, Pf , buscada de tal modo que Pf = Φ (− β ) (3) donde Φ ( ) es la distribución normal normalizada acumulada. Por ejemplo, para Pf = 0.20, β = 0.84 . Debe notarse que la utilización de funciones de distribución normal está implícita en el uso de las ecuaciones (3) y (4). Si fuera necesario utilizar otras funciones de distribución se pude seguir el mismo procedimiento pero utilizando variables normales equivalentes obtenidas con la trasformación de Rosenblatt [11]. Por lo tanto, si una probabilidad de falla condicional igual a 0.20 es especificada para un objetivo de performance y un COV de 0.80 es asumido para el parámetro de la demanda sísmica bajo estudio, el valor medio (no el valor nominal o especificado) de la capacidad del parámetro debería ser más grande que (1 + β COVDx ) = 1 + 0.84 × 0.80 veces la demanda media. Si se utiliza un valor nominal de la capacidad, el factor de amplificación de la demanda debería ser disminuido de acuerdo con la relación entre las capacidades medias y nominales. Nótese que β =0.84 ( Pf = 0.20 ) es muy cercano a la regla de diseño que recomienda utilizar el espectro correspondiente a la demanda media + σ . Sin embargo, ningún factor de reducción es necesario para el valor medio de la capacidad. El desvío estándar, σ Dx , debe incluir todas las incertidumbres en la demanda (tales como magnitud del terremoto, tipo de falla, foco, efectos direccionales, topografía, perfil del suelo y respuesta estructural). Uno de los aspectos de la formulación probabilística es la definición de los factores de combinación de carga para utilizar con cada uno de los objetivos de performance previamente establecidos. Estos factores pueden seleccionarse fácilmente aplicando la regla de Turkstra de combinaciones de carga [12]. Esta regla está basada en la observación de que cuando una componente de las acciones alcanza su valor extremo (es este caso la excitación sísmica), las otras componentes de las solicitaciones están actuando con su valor medio instantáneo. Dado que los valores medios instantáneos son los mismos para todos lo niveles sísmicos y si consideramos que su COV es mucho menor que el COV de la demanda sísmica, la combinación de carga para cada objetivo de performance i, podría escribirse de la siguiente forma (1 + β COV ) EQ + i EQi Dapt Dn Dn + Lapt Ln Ln + Sapt Sn Sn (4) Datos estadísticos de las cargas [14] han mostrado que la relación entre el valor medio instantáneo y los valores nominales son para la carga de peso propio iguales a Dapt = 1.05 Dn y para las sobrecargas a Lapt = 0.24 Ln . Las características temporales de la carga de nieve varían ampliamente con la climatología local. A partir de un estudio de la combinación de excitaciones sísmicas con nieve realizado por Ellingwood and Rosowsky [15] la relación entre el valor medio instantáneo de la carga de nieve cuando ocurre el terremoto y el valor nominal puede aproximarse con S apt = 0.20 S n . Por lo tanto, considerando para todos los objetivos de performance COVEQ = 0.80 y a modo de ejemplo las probabilidades de falla de la Tabla 1, los siguientes factores de excitación podrían ser utilizados Frequent Occasional Rare Very Rare EQGMs, 1.20 EQ freq + 1.05 Dn + 0.24 Ln + 0.20 Sn EQGMs, 1.40 EQ occas + 1.05Dn + 0.24 Ln + 0.20 Sn (5) EQGMs, EQGMs, 1.50 EQ rare + 1.05Dn + 0.24 Ln + 0.20 Sn 1.70 EQ v.rare + 1.05Dn + 0.24 Ln + 0.20 Sn La demanda sísmica definida en las ecuac.(6) debería ser comparado con la capacidad media sin factores de reducción dado que toda la incertidumbre ha sido concentrada en la demanda. Las ecuac.(6) son válidas tanto para el diseño tradicional basado en resistencia como para un diseño basado en desplazamientos o daños. Teniendo en cuenta que un significativo comportamiento no lineal es esperado para niveles de performance más allá de los niveles operacionales, las combinaciones de las ecuac.(6) no deben ser interpretadas como combinaciones lineales de los efectos de las cargas. Las ecuac.(6) indican el nivel de las cargas gravitatorias que deberían ser consideradas simultáneamente con el movimiento sísmico. Debido a los efectos P- ∆ las cargas gravitatorias afectan el espectro de IDI para edificios (que se presenta en la sección 5.3). El daño local y las rotaciones en las articulaciones plásticas, son afectados también por el nivel de las cargas gravitatorias sobre las vigas, especialmente para vigas largas en los pisos superiores [2]. Nótese que todos estos efectos no pueden ser considerados en forma apropiada utilizando espectros de sistemas de un grado de libertad. 5.3. La necesidad de espectros de diseños para edificios (n grados de libertad) La mayoría de las metodologías actuales de diseño sísmico están basadas en espectros de diseño para sistemas de un grado de libertad (es decir basadas solamente en parámetros globales). Sin embargo, dado que los niveles de performance están asociados a valores límites de los parámetros de la respuesta estructural local, tales como el índice de daño local, el índice de distorsión de entrepisos y las aceleraciones de piso, debería disponerse para el diseño preliminar de espectros de diseños locales de tales parámetros. Es evidente que deben hacerse varias hipótesis para construir estos espectros para edificios pero en cualquier caso, estos espectros y el conocimiento de estas hipótesis, proporcionarán una guía para el diseñador muy superior al espectro de un grado de libertad actual. El desarrollo de un espectro de diseño para edificios es explicado en las secciones siguientes. 5.3.1. Desarrollos de espectros IDI elásticos e inelásticos Consideremos primero que el edificio puede ser modelado como un sistema elástico-lineal unidimensional con masa distribuida [Figura 4 (a)]. La formulación de la respuesta sísmica de sistemas que tienen parámetros distribuidos en forma continua puede ser realizada con procedimientos que son completamente análogos a aquellos de los sistemas de masa concentrada [16]. Usando análisis modal, las ecuaciones del movimiento en términos de las coordenadas modales desacopladas toman la misma forma que las ecuaciones de sistemas de masas concentradas y pueden expresarse como L 2 Y&&i (t ) + 2ξiω i Y&i (t ) + ω i Yi (t ) = − i u&&g (t ) Mi (6) donde Yi es la amplitud de la respuesta del modo i, ωi = la frecuencia del modo i, ξi es el amortiguamiento viscose del modo i, u&&g (t ) = historia de aceleraciones del movimiento sísmico, y la masa generalizada ( M i ) y el factor de excitación sísmica modal ( Li ) asociados con la masa distribuida m( x) y la forma del modo i ϕ i ( x) son H H Li = ∫ m( x) ϕ i ( x )dx M i = ∫ m( x ) [ϕ i ( x)] dx 2 0 0 (7) n m( x ) w( x, t ) = ∑ ϕ i ( x)Yi (t ) i =1 w( x, t ) IDI ( x, t ) = w′( x, t ) = x n ∂w( x, t ) = ∑ ϕi′( x )Yi (t ) ∂x i =1 IDI ( x , t ) Elastic IDI (SCT EQGM) ξ =5% Elastic IDI (Los Gatos EQGM) ξ =5% 0.05 0.05 H=30 m H=90 m H=60 m 0.04 Story Drift Index, IDI Story Drift Index, IDI H=30 m H=120 m 0.03 0.02 0.04 H=60 m 0.03 H=90 m 0.02 H=120 m 0.01 0.01 0 0 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 0 4.0 0.5 1 Inelastic IDI (Los Gatos EQGM) ξ =5% 2 2.5 3 3.5 4 Inelastic IDI (SCT EQGM) ξ =5% 0.06 0.06 µ = 4.0 0.05 0.05 µ = 3.0 0.04 µ = 2.0 0.03 µ = 1.0 Story Drift Index, IDI Story Drift Index, IDI 1.5 Period, T (s) Period, T (s) 0.02 T = 0.0731H 3 / 4 H [ m] 0 0 1.0 1.5 2.0 Period, T (s) 2.5 3.0 3.5 4.0 µ = 2.0 µ = 1.0 0.02 0.01 0.5 µ = 3.0 0.03 0.01 0.0 µ = 4.0 0.04 T = 0.0731H 3 / 4 0 50 100 H [ m] 150 Building Height, H (m) Figura 4. Espectros elásticos e inelásticos para el análisis del daño en elementos no estructurales de edificios 200 El desplazamiento relativo a la base, w( x, t ) , y la distorsión, w′( x, t ) , en cada piso se puede calcular como n ∂w( x, t ) n w( x, t ) = ∑ ϕ i ( x )Yi (t ) w′( x, t ) = = ∑ ϕ i′( x)Yi (t ) (8) ∂x i =1 i =1 Si se asume que el edificio puede modelarse como una viga de corte uniforme, los parámetros modales son los siguientes: 2i − 1 x ϕ i ( x ) = (−1)i sin π H 2 H Li = ∫ mϕ i ( x)dx = (−1)i 0 H 2 mH 2i − 1 π M i = ∫ m [ϕ i ( x )] dx = m 2 0 Ti 1 = T1 2i − 1 (9) H 2 En las ecuac. (9), m = masa por unidad de longitud del edificio (asumida constante), H = altura del edificio y Ti = período del modo i. Dado que w′( x, t ) puede considerarse una estimación de IDI en diferentes alturas del edificio durante la respuesta de la estructura, el máximo IDI se puede calcular como L max w′( x, t ) = ∑ ϕ i′( x ) i S d (Ti , ξ i ) Mi i =1 n 2 (10) donde S d (Ti , ξi ) es el desplazamiento espectral relative de un sistema de un grado de libertad. Si asumimos que el máximo IDI ocurre en la base de la estructura (tal como se espera para una viga de corte) y considerando que para todos los modos es 2 mH L 2i − 1 π 2i − 1 π 2 ϕ i′(0) i = = (11) mH M i 2 H H 2 El máximo IDI elástico se puede calcular como IDI = 2 H n ∑S i =1 d (Ti , ξi )2 (12) En la fig. 4 (b) se muestra el máximo IDI elástico para edificios con diferentes alturas en función del período del primer modo, utilizando la ecuac. (13) para los registros sísmicos de Los Gatos (Loma Prieta, 1989) y SCT (México, 1985), representativos de movimientos sísmicos del tipo de pulso severo y periódicos respectivamente. Si la respuesta estructural es no lineal, debido a la concentración del daño inevitable en alguno de los entrepisos, se produce una amplificación de los IDI en esos entrepisos. Esta amplificación es más grande a medida que la respuesta estructural avanza en el rango no lineal (es decir a medida que la ductilidad global de desplazamiento µ se incrementa). Dado que hay muy pocos estudios sistemáticos de este efecto, se necesita urgentemente contar con estudios de la concentración de daño local durante la respuesta no lineal en edificios. Hasta que estos resultados estén disponibles, el factor empírico µ 0.414 recomendado por Hwang Jaw [17] podría ser usado para estimar la amplificación de la máxima distorsión de entrepisos debido a la concentración de las rotaciones plásticas en un piso. Por lo tanto, el máximo IDI inelástico se puede estimar como 2 n (13) Sd (Ti , ξ i )2 µ 0.414 ∑ H i =1 La ecuac. (14) debería ser empleada con mucho cuidado dado que los factores de amplificación por concentración de las deformaciones en los entrepisos tienen coeficientes de variación muy grandes y son muy sensibles a pequeños cambios en la capacidad de los entrepisos (el análisis probabilístico debería incluir esta incertidumbre). Valores más grandes del factor de amplificación deberían ser utilizados cuando un piso débil no puede ser evitado. Por otra parte es posible utilizar valores más pequeños si se utiliza un cuidadoso diseño conceptual basado en la performance. La fig. 4 (c) muestra los máximos IDI inelásticos para µ = 1.0, 2.0, 3.0 y 4.0 en función de la altura total del edificio para pórticos de hormigón armado típicos, usando la ecuac. (14) para los movimientos sísmicos de Los Gatos y SCT. Para cada período T la altura del edificio fue calculada considerando la fórmula del Reglamento NEHRP [18] para pórticos de hormigón armado 3/ 4 Nótese como estos espectros ( T = CT H donde CT = 0.0731 y H está en m ). muestran muy claramente que para controlar el IDI para movimientos sísmicos de las características de los utilizados en este trabajo, debería diseñarse una estructura considerablemente más rígida que lo habitual. Surge también que debería limitarse considerablemente la ductilidad global para evitar una concentración intolerable de IDI. IDI µ = IDI µ 0.414 = 5.3.2. Desarrollo de espectros de daño local Para satisfacer la definición de PBSE, es necesario calcular numéricamente diferentes niveles de daño estructural para niveles específicos de movimientos sísmicos. El daño estructural durante un terremoto es originado no solamente por las deformaciones máximas excesivas, sino también por el daño acumulado bajo deformaciones inelásticas reversibles. Los primeros índices de daño (y los más simples) estaban basados en ductilidad y, por lo tanto, fracasaban en contemplar los efectos del daño acumulado debido a la repetición de los ciclos de deformación [19]. Más recientemente varios investigadores han propuesto índices de daño que consideran el efecto de la acumulación de daño incluyendo la energía histerética disipada durante la respuesta. Si bien no puede reproducir con precisión todas las secuencias de daño para todas las posibles historias carga-deformación, el índice más conocido y ampliamente usado es el de Park-Young [20]. El mismo consiste de la combinación lineal deformación máxima y la disipación de energía plástica normalizadas. El de Park y Young, modificado para tener DM=0 antes de fluencia, se escribir para un sistema de un grado de libertad como δ δ− E µ δ −δ y δ µ DM = +b H = + bγ 2 µ δ δ umon − δ y Fyδ umon δ δ umon umon − µ de la índice puede (14) donde δ es el máximo desplazamiento durante el movimiento sísmico, δ y es el desplazamiento de influencia, Fy es la resistencia de fluencia del sistema, δ umon es el valor último del desplazamiento en el estado de colapso inminente bajo cargas incrementadas monotónicamente, EH µ es la energía histerética disipada por deformación plástica, µ la máxima ductilidad de desplazamiento durante el movimiento sísmico y b un parámetro que controla el deterioro de la resistencia en función de la cantidad de energía disipada por deformación plástica. Este parámetro depende de decisiones del diseñador relacionadas con el tipo de conexiones usadas en los nudos de unión viga-columna, el detallado, el nivel de carga axial y corte en las regiones críticas (articulaciones plásticas), la relación de dimensiones de las barras y el parámetro γ definido por Fajfar [21] como T = 0.0731H 3 / 4 1.2 IDI µ IDI − µ T = 0.0731H 3 / 4 IDI − H [m ] 1.0 θ umon 0.8 0.6 µ = 3.0 0.4 µ = 2.0 0.2 µ = 1.0 µ = 1.5 θ umon 0.8 0.6 µ = 3.0 µ = 2.0 0.4 0.2 0.0 µ = 1.5 50 100 150 200 0 50 Building Height, H (m) ξ =5% 100 150 200 Building Height, H (m) DM due to cumulative hysteretic energy (Los Gatos EQGM) DM due to cumulative hysteretic energy (SCT) ξ = 5 % θ umon = 0.05 b = 0.20 θ umon = 0.05 b = 0.20 1.2 1.2 T = 0.0731H 3 / 4 H [m ] bγ 2 µ T = 0.0731H 3 / 4 IDI θ umon 0.8 µ = 3.0 µ = 2.0 0.6 0.4 µ = 1.5 0.2 H [m ] 1.0 Damage Index, DM 1.0 Damage Index, DM µ = 1.0 0.0 0 µ = 1.0 bγ 2 µ µ = 3.0 IDI θ umon 0.8 0.6 µ = 2.0 0.4 0.2 0.0 µ = 1.5 µ = 1.0 0.0 0 50 100 150 0 200 50 Maximum Local DM (Los Gatos EQGM) ξ = 5 % θ umon = 0.05 b = 0.20 1.0 IDI µ IDI + bγ 2 µ IDI θ umon − µ IDI − θ umon 1.2 0.4 µ = 1.0 T = 0.0731H 3 / 4 1.2 T = 0.0731H 3 / 4 Damage Index, DM µ = 1.5 0.2 200 H [m ] IDI IDI − µ IDI + bγ 2 µ IDI θ umon θ umon − µ µ 0.414 µ = 3.0 1.0 µ = 2.0 0.6 150 Maximum Local DM (SCT EQGM) ξ = 5 % θ umon = 0.05 b = 0.20 µ 0.414 µ = 3.0 0.8 100 Building Height, H (m) Building Height, H (m) Damage Index, DM IDI µ IDI − µ IDI − H [m ] 1.0 Damage Index, DM 1.2 Damage Index, DM DM due to maximum IDI (SCT EQGM) ξ = 5 % θ umon = 0.05 b = 0.20 DM due to maximum IDI (Los Gatos EQGM) ξ = 5 % θ umon = 0.05 b = 0.20 H [m ] 0.0 µ = 2.0 0.8 0.6 µ = 1.5 0.4 0.2 µ = 1.0 0.0 0 50 100 Building Height, H (m) γ = EH µ kδ 2 = EH µ m ωδ 150 200 0 50 100 150 200 Building Height, H (m) (15) Figura 5 Espectro del daño estructural en edificios para sismos impulsivos (Los Gatos) y de larga duración (México SCT) donde k es la rigidez estructural, m la masa estructural y ω la frecuencia circular de la estructura. Es posible expresar el índice de daño de la ecuac. (15) en términos de la rotación promedio en lugar del desplazamiento. La expresión resultante es θ θ− EH µ θ −θ y µ θ DM = +b = + bγ 2 µ (16) θ θ umon − θ y M yθ umon θ umon θ umon − µ Nótese que los únicos cambios con respecto a la ecuac. (15) son que el máximo desplazamiento estructural δ , fue reemplazado por la máxima rotación promedio θ . El desplazamiento último δ umon fue reemplazado por la rotación última bajo deformación monotónica θ umon y que la resistencia de fluencia del sistema Fy fue reemplazada por el momento de fluencia en la articulación plástica M y . Las ecuac. (17) tiene la ventaja sobre la ecuac. (15) en que el DM se expresa en términos de los parámetros de la articulación plástica, en donde la energía de deformación efectivamente se disipa (y por lo tanto donde el daño ocurre). Téngase en cuenta que θ umon es un parámetro que puede ser especificado como un requerimiento general que debe ser satisfecho por los elementos estructurales. Este no es el caso para δ umon . En lugar de un oscilador de un grado de libertad, consideremos ahora el caso de un edificio real. Si asumimos que todas las articulaciones plásticas que transforman la estructura en un mecanismo ocurren al mismo tiempo, y que tienen el mismo θ umon entonces todas las articulaciones plásticas tendrán el mismo daño local definido por la ecuac. (17). Si consideramos ahora que las articulaciones plásticas de cada piso son aproximadamente iguales al IDI y que la concentración de daño en la articulación plástica puede ser considerada con el mismo factor propuesto por Hwang y Jaw [17] [ecuac. (14)], el máximo daño local se puede calcular como IDI IDI − µ IDI DM L = + bγ 2 µ IDI IDI umon IDI umon − µ IDI IDI − µ IDI µ 0.414 = + bγ 2 µ IDI θ umon θ umon − µ µ 0.414 (17) La figura 5 muestra el daño local para los movimientos sísmicos de Los Gatos y SCT obtenidos con la ecuac. (18) para edificios de pórticos de hormigón armado típicos. Para cada período T la altura del edificio fue calculada considerando la fórmula del Reglamento NEHRP [18] para pórticos de hormigón armado ( T = CT H 3/ 4 donde CT = 0.0731 y H está en m ). En la Fig. 5, los primeros dos gráficos (en la parte superior) muestran el DM debido a la consideración de IDI solamente. El segundo grupo de dos gráficos muestra el daño debido a la energía histerética acumulada EH µ y finalmente los dos gráficos en la parte inferior muestran el daño local total incrementados por el factor empírico µ 0.414 tal como se muestra en la ecuac. (18). 5.4 La necesidad de un procedimiento de diseño preliminar que considere un índice de acumulación de daño De acuerdo con la Fig. 5, el efecto del daño acumulado para µ =3 podría ser responsable no solamente de más del 70% del índice de daño en el caso de un movimiento fuerte periódico de larga duración como el SCT (T= 2 s o H=80 m) sino que podría también ser responsable por cerca del 40% del daño local para movimientos sísmicos de pulso severo como el de Los Gatos, para ciertos valores del período estructural (T= 0.7 s o H=20m). Resulta muy claro viendo la Fig. 5 que, para un movimiento sísmico de tipo periódico de larga duración, el efecto del daño acumulativo sobre el deterioro de la estructura es mayor que el efecto del daño debido al máximo IDI solamente (o al desplazamiento máximo para un sistema de un grado de libertad). El efecto acumulativo del daño podría también ser importante cuando se considera la ocurrencia de “aftershocks” significativos. 5.5. La necesidad de controlar no solamente los desplazamientos sino también la ductilidad (o la resistencia mínima) Para controlar el daño es necesario limitar no solamente los desplazamientos sino también la máxima ductilidad global (es decir la resistencia mínima del edificio), como se puede deducir de la observación de la figura 5 donde el daño local se calcula utilizando la ecuac. (18). El aumento de la ductilidad global incrementa tanto el primer y segundo término de la ecuac.(18) como el factor común fuera del paréntesis. En el primer término esto sucede porque para el mismo desplazamiento máximo una ductilidad más pequeña significa contar con desplazamientos de fluencia mayores, de modo que en el límite podría ser posible obtener el desplazamiento máximo sin daños si la estructura permanece elástica (es decir con µ =1). Es decir que considerando solamente el primer término resulta claro que la ductilidad incrementa el daño aún para sistemas de un grado de libertad y sin considerar la acumulación de daño. Por otra parte, el segundo término de la ecuac.(18), tiende a incrementarse casi linealmente con µ . Finalmente la concentración de daño en edificios de varias plantas representada por el factor común fuera del paréntesis es más grande a medida que la respuesta estructural penetra en el rango no lineal. Como resultado, la ductilidad global tiene efectos muy importantes sobre el nivel de daño local tal como se muestra en la Fig. 5. Si el Tinitial (es decir el T elástico) es definido por el estado límite de servicio, entonces para controlar el daño para los estados límites de “seguridad de vidas” o “prevención del colapso” es necesario limitar no solamente los desplazamientos sino también la ductilidad y por lo tanto se necesita una resistencia mínima. Si el diseño no considera el estado límite de servicio, la ductilidad de desplazamiento µ puede ser disminuida reduciendo la rigidez k [ver los diseños A y B en la Fig.6(a)]. Este hecho demuestra también claramente la necesidad de diseñar para dos objetivos de performance (es decir diseñar para el estado límite de servicio además del estado límite de seguridad de vidas). 5.6 La necesidad de una metodología de diseño preliminar conceptual e integral Varias metodologías de diseño simplificadas han sido consideradas para el diseño sísmico basado en la performance: (a) diseño basado en las resistencias; (b) diseño basado en los desplazamientos y (c) diseño basado en la energía [1]. Una discusión sobre las debilidades del diseño basado en resistencias puede verse en la referencia [22]. En resumen, dado que un diseño basado en la performance necesita considerar distintos niveles de daño, resulta claro que un diseño basado en desplazamientos resulta más adecuado debido a que el daño es mucho más sensible a los desplazamientos (deformaciones) que a las resistencias (tensiones). Los procedimientos de diseño basados en desplazamientos pueden clasificarse en dos grupos: en el primer grupo [23] [24], los desplazamientos se utilizan fundamentalmente para verificar un diseño preliminar basado en resistencias realizado con las fuerzas del estado límite de servicio o bien con las fuerzas calculadas con los procedimientos de los reglamentos actuales. El segundo grupo [22] intenta utilizar una metodología simplificada para obtener un diseño preliminar a partir de la demanda de desplazamientos. En algunas referencias esta metodología es llamada “diseño directo basado en desplazamientos”. Algunos de estos procedimientos utilizan una estructura sustituta elástica y un amortiguamiento estructural efectivo equivalente cuya estimación está basada sobre un determinado nivel de ductilidad δ µ= utilizando relaciones empíricas entre µ y el amortiguamiento efectivo δy equivalente ξe . Dado que el amortiguamiento viscoso involucra una disipación de energía sin daño, mientras que ductilidad implica disipación de energía con daño asociado no es posible definir un único amortiguamiento equivalente para todos los parámetros de la respuesta a ser considerados. El inconveniente de cualquier metodología que trata de reducir el real comportamiento inelástico no lineal usando un amortiguamiento equivalente es intrínseco a las ecuaciones que gobiernan la respuesta de un sistema inelástico. Consideremos las siguientes ecuaciones lineales y no lineales del movimiento del sistema de un grado de libertad [16]: mu&&g (t ) f (u , u& ) u&& u& + 2ξωn + ωn 2 s = −ωn 2 Ecuación no-lineal uy uy fy fy mu&&g (t ) u&& u& u + 2 ξ e ωn + ωn 2 = −ωn 2 uy uy uy fy Ecuación lineal equivalente (18) Maximum Local DM (Los Gatos EQGM) ξ = 5 % θ umon = 0.05 b = 0.20 Seismic Yielding Coefficient, Cy (Los Gatos EQGM) ξ =5% 2.0 1.2 µ = 3.0 1.0 1.6 Damage Index, DM Seismic Yielding Coefficient, Cy 1.8 1.4 1.2 µ = 1.0 1.0 µ = 1.5 B 0.8 µ = 2.0 0.6 0.4 H=60 M 0.8 A 0.6 µ = 1.5 A 0.4 0.2 µ = 3.0 0.0 µ = 1.0 0.0 0.0 0.5 1.0 1.5 2.0 2.5 3.0 0.0 0.5 1.0 1.5 Period, T (s) 3.0 µ = 1.0 2.0 1.5 µ = 2.0 0.5 3.0 µ = 1.0 3.5 Seismic Yielding Coefficient, Cy 3.5 1.0 2.5 Seismic Yielding Coefficient, Cy (Los Gatos EQGM) ξ =5% 2.5 2.0 Period, T (s) Seismic Yielding Coefficient, Cy (Los Gatos EQGM) µ = 4.0 0.0 3.0 ξ =5% 2.5 2.0 ξ = 15 % 1.5 1.0 0.5 ξ = 30 % 0.0 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 0.0 0.5 1.0 1.5 Period, T(s) 2.0 2.5 3.0 3.5 4.0 Period, T(s) Displacement, Sd (Los Gatos EQGM) Displacement, Sd (Los Gatos EQGM) µ = 1.0 ξ =5% 2.5 2.5 µ = 1.0 µ = 4.0 2.0 1.5 Displacement, Sd (m) Displacement, Sd (m) B B IDI A 0.2 Seismic Yielding Coefficient, Cy V µ = 2.0 µ = 2.0 1.0 0.5 ξ =5% 2.0 ξ = 15 % 1.5 1.0 ξ = 30 % 0.5 0.0 0.0 0.0 0.5 1.0 1.5 2.0 Period, T(s) 2.5 3.0 3.5 4.0 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 Period, T(s) Figura 6. (a) Control del daño estructural disminuyendo la rigidez, (b) y (c) Diferencia en las características de la respuesta considerando la ductilidad y un amortiguamiento equivalente 4.0 donde u (t ) = desplazamiento del sistema de un grado de libertad, u y = desplazamiento de fluencia, f y = resistencia de fluencia y f s (u, u& ) = fuerza resistente de un sistema elasto-plástico. Aunque diferentes métodos han sido sugeridos y utilizados para estimar el amortiguamiento viscoso equivalente ( ξe ) a ser usado en la ecuac.(19b), es opinión del autor que será muy difícil establecer un valor confiable para ξe . La razón principal para ello es que la energía disipada proviene de términos diferentes en las dos ecuaciones (19), de tal modo que la respuesta máxima (y por lo tanto el daño) de un sistema de un grado de libertad puede ser significativamente diferente para ambas ecuaciones. A partir de la interpretación de las dos ecuaciones precedentes, resulta claro que mientras la disipación de energía por el amortiguamiento viscoso equivalente ξe ocurre durante toda la respuesta de la estructura, es decir tanto en su respuesta elástica como inelástica, la energía disipada por deformación plástica ( µ ) ocurre solamente cuando la estructura incurre en deformaciones plásticas. De allí que el valor del amortiguamiento equivalente ξe resulta muy sensible al tipo (y a toda la historia de aceleraciones) del movimiento sísmico. Las conclusiones precedentes son graficadas por los resultados de las Figuras 6(b) y 6(c) donde se muestran los espectros no lineales de resistencias y desplazamientos para el registro sísmico de Los Gatos utilizando 5% de amortiguamiento y ductilidades de 1.0, 2.0 y 4.0 por un lado, y usando comportamiento elástico y amortiguamientos del 5, 15 y 30% por el otro. Nótese que la demanda de resistencia C y disminuye con el incremento de µ Sin (conξ constante) o incrementando ξ (con comportamiento elástico). embargo, la demanda de desplazamientos S d siempre se reduce con el incremento de ξ (con comportamiento elástico) pero puede aumentar o disminuir cuando µ se incrementa (con ξ constante). A partir de los resultados mostrados en la Figura (6c), resulta claro que el amortiguamiento es mucho más efectivo que la ductilidad en reducir los desplazamientos (nótese la importancia que tiene que el diseñador reconozca claramente que la ductilidad y el amortiguamiento no son equivalentes en términos de la reducción de los desplazamientos). Si se reemplaza la predicción de la respuesta inelástica real (resistencia y deformaciones) por la predicción de tal respuesta utilizando un análisis elástico lineal con un amortiguamiento equivalente ξe obtenido igualando EH µ a EH ξ e , este análisis no puede llevar a una estimación confiable de la respuesta real (resistencia y deformación), dado que solamente puede ajustarse uno de los parámetros de la respuesta estructural. Una discusión acerca de las diferencia entre los efectos relativos de la fluencia y el amortiguamiento se pueden ver en la Referencia [16]. Aunque la aplicación del procedimiento de la estructura elástica sustituta es simple, el uso de un amortiguamiento equivalente que funde dos características mecánicas diferentes en una sola, puede ser mal interpretado por los diseñadores. En todo caso, para el diseño sísmico basado en la performance se necesita un procedimiento de diseño integral que permita calibrar este procedimiento simplificado para evitar su mal uso, es decir, para encontrar sus limitaciones. Hasta el momento han sido desarrollados también unos pocos procedimientos de diseño basados en la energía [25]. Nuevamente, aunque la demanda total de energía y de energía histerética son probablemente los mejores parámetros para seleccionar los movimientos sísmicos de diseño, las metodologías de diseño basadas en la energía que han sido desarrolladas hasta ahora solo satisfacen la ecuación energética considerando una deformación creciente monotónicamente que difícilmente pueda representar la respuesta sísmica y el daño real. En resumen, la mayor parte de los métodos para el diseño sísmico basado en la performance que han sido propuestos hasta el presente han sacrificado algún concepto importante en aras de la simplicidad. Sin embargo, con la cantidad de software específico, hojas de cálculo y aplicaciones matemáticas hoy disponibles el concepto de simplicidad debería ser redefinido. Un procedimiento numérico no es más simple porque una ecuación tenga menos términos o algún parámetro significativo se ignore. Un procedimiento numérico es simple cuando es fácilmente comprendido y cuando el diseñador puede ir en forma explícita y transparente desde los objetivos de performance hasta los valores de diseño. Un procedimiento de diseño basado en criterios probabilísticos de niveles múltiples que explícitamente considera desde el comienzo los objetivos de performance en términos de desplazamientos, resistencias, disipación de energía y daño de los elementos estructurales, no estructurales y contenidos es llamado un diseño conceptual integral. En las Referencias [26] y [27] puede verse en detalle la aplicación de tal tipo de procedimiento de diseño conceptual integral aplicado al diseño de dos edificios de hormigón armado, uno de 30 pisos y otro de 10 pisos. 6. CONCLUSIONES Se ha demostrado en este trabajo que para obtener un diseño sísmico basado en la performance confiable es necesario: a) Utilizar desde el principio del diseño preliminar niveles de diseño múltiple. Deberían considerarse, como mínimo, dos niveles de desempeño (incluso para el diseño preliminar), de modo de asegurar que el diseño final satisfaga todos los objetivos de performance seleccionados (Fig. 2 y 3) b) Considerar un enfoque de diseño probabilístico. El enfoque ideal sería desarrollar una metodología de diseño y evaluación basada totalmente en la confiabilidad. Esta metodología permitiría al diseñador determinar con qué probabilidad el edificio cumple con los objetivos de desempeño establecidos. Considerando que para las resistencias puede esperarse un COV de aproximadamente 0.20 y para la demanda sísmica un COV de alrededor de 0.80, se demuestra que puede utilizarse una metodología de diseño probabilística simple, implementada a través de la utilización de factores de mayoración de las acciones, como es tradicional en la práctica actual. c) Considerar los daños locales tanto estructurales como no estructurales. Se ha demostrado con claridad que no es adecuado, a los efectos del diseño, considerar el daño global como un promedio de niveles de daño altos y bajos en diferentes regiones de un edificio ya que una región con baja demanda no puede evitar las consecuencias del daño en los segmentos más solicitados de la estructura. Por lo tanto se necesitan construir espectros de diseño para edificios que tengan en cuenta la concentración local del daño. Como se demuestra en la tesis, se pueden desarrollar tanto espectros elástico e inelásticos de las distorsiones de entrepiso (Fig. 4) así como espectros de daño local para edificios (Fig. 5) a partir de las ecuaciones básicas de la respuesta sísmica modal de sistemas de n grados de libertad. d) Considerar la acumulación de daño. Se ha demostrado que para un movimiento sísmico de tipo periódico de larga duración el efecto del daño acumulativo puede ser más grande que el daño debido a la máxima distorsión de entrepiso. Inclusive en el caso de movimientos sísmicos de tipo impulsivo el daño acumulativo podría ser responsable de una parte significativa del daño local para ciertos valores específicos del período de la estructura (Fig. 5). El efecto acumulativo del daño es importante, además, cuando se considera la existencia de réplicas significativas. e) Controlar no solamente los desplazamientos sino también las ductilidades (resistencias mínimas) a los efectos de limitar el daño. Se ha demostrado que la ductilidad global (es decir, para una rigidez dada la resistencia del edificio) tiene un efecto muy significativo sobre el nivel de daño local (Fig. 5). Incrementar la ductilidad no solamente incrementa el daño en un sistema de un grado de libertad sino que también incrementa la concentración del daño local en el edificio a medida que la estructura responde más profundamente en el rango no lineal. f) Los procedimientos numéricos simplificados que se utilicen para el diseño sísmico preliminar basado en la performance deberían ser conceptualmente claros y confiables. Se ha demostrado que algunas de las metodologías propuestas no satisfacen los requerimientos para alcanzar un diseño sísmico confiable. En particular se ha concluido que conceptualmente, si la predicción de la respuesta inelástica real (resistencia y deformación) es reemplazada por la predicción de dicha respuesta a través de un análisis elástico lineal considerando un coeficiente de amortiguamiento equivalente obtenido igualando la energía de deformación plástica con la energía disipada en el amortiguador viscoso ( EH µ a EH ξ e ), este análisis no puede llevar a una estimación confiable de la respuesta real (resistencia y deformación) ya que únicamente puede ser ajustado uno de los paramentos principales de la respuesta (resistencia o deformación) (Fig. 6). 7. REFERENCIAS 1. SEAOC Vision 2000 Committee (1995); “Performance-Based Seismic Engineering”, Report prepared by Structural Engineers Association of California, Sacramento, California. 2. Bertero V.V. (1997) “Performance-Based Seismic Engineering: A Critical Review of Proposed Guidelines”. Proceedings of the International Workshop on Seismic Design Methodologies for the Next Generation of Codes. A.A. Balkema/Rotterdam. 3. Collins, K., and Stojadinovic, B. (2000). “Limit States for Performance-Based Design”. Proceedings of 12 WCEE. Auckland, New Zealand. 4. EERI (1994). “Northridge Earthquake, January 17, 1994. Preliminary Reconnaissance Report”. Earthquake Engineering Research Institute. 94-01. 5. Newmark, N.M. and Hall, W.J. (1973), “Procedures and criteria for earthquake resistant design”, Build. Res. Series No.46, Nat. Bureau of Standards, U.S. Depts of Commerce, Washington, D. C., 209-236. 6. Der-Kiureghian, A. and Ang, A.H.S. (1977), “A fault-rupture model for seismic risk analysis”, Bulletin of the Seismological Society of America, Vol. 67, No.4. 7. Miranda, E. (1993), “Site-Dependent Strength-Reduction Factors”, Journal of Structural Engineering, Vol. 119, No.12, December 1993, ASCE, 3503-3519. 8. Cornell, A., and Krawinkler, H. (2000). “Progress and Challenges in Seismic Performance Assesment”. PEER Center News Vol. 3 No. (2). 9. Ellingwood, B., MacGregor, J., Galambos, T., and Cornell, A. (1982). “Probability Based Load Criteria: Loads Factors and Load Combinations”. Journal of the Structural Division. ASCE. Vol.108, No.ST5, May 1982. 10. Algermissen, S.T., et al. (1982). “Probabilistic estimates of maximum acceleration and velocity in rock in the contiguous United States.” Open File Rep. No. 82-1033, U.S. Geological Survey, Reston, Va. 11. Bertero, R. (1997). ”Acceptability Checks For Performance-Based Design”. Proceedings of The EERC-CUREe Symposium in Honor of Vitelmo V. Bertero. January 31- February 1, 1997. Berkeley, California, USA. 12. Ang, A., and Tang, W. (1984). “Probability Concepts in Engineering Planning and Design”. Vol. II. John Wiley & Sons. 13. Nowak, A. and Collins, K. (2000). “Reliability of Structures”. McGraw-Hill. 14. Galambos, T., Ellingwood, B., MacGregor, J. and Cornell, A. (1982). “Probability Based Load Criteria: Assessment of Current Design Practice”. Journal of the Structural Division. ASCE. Vol.108, No.ST5, May 1982. 15. Ellingwood, B.,and Rosowsky, D.(1996). “Combining Snow and Earthquake Loads for Limit States Design”. Journal of the Structural Division. ASCE. Vol.122, No.ST11, Nov. 1996. 16. Chopra, A. (1995). “Dynamics of Structures. Theory and Applications to Earthquake Engineering”. Prentice Hall. 17. Hwang, H. and Jaw, J. (1990). “Statistical evaluation of deflection amplification factors for reinforced concrete structures”, Proceedings Forth U.S. National Conference on Earthquake Engineering, EERI, El Cerrito, California, USA, Vol.2, 1990, 937-944. 18. NEHRP Recommended Provisions for the Development of Seismic Regulations for new Buildings (1994). 19. Williams, M. and Sexsmith, R. (1995). “Seismic Damage Indexes for Concrete Structures: A State-of-the-Art Review”, Earthquake Spectra, Vol.11, No2., May 1995, 319-349. 20. Park, Y.J. and Ang, A.H.S. (1985). “Mechanistic Seismic Damage Model for Reinforced Concrete”, Journal of Structural Engineering, Vol. 111, No.4, April 1985, ASCE. 21. Fajfar, P. (1992). “Equivalent Ductility Factors, Taking into Account Low-Cycle Fatigue”, Earthquake Engineering & Structural Dynamics, Vol. 21, No.10, October 1992, 837-848. 22. Priestley, M.J.N. (2000). “Performance Based Seismic Design”. Proceedings of 12 WCEE. Auckland, New Zealand. 23. Mohele, J.P. (1992). “Displacement-based Design of RC Structures Subjected to Earthquakes”, Earthquake Spectra, Vol.8, No.3, August 1992, 403-428. 24. ATC 40 (1997). “Seismic Evaluation and Retrofit of Concrete Buildings”, ATC, Redwood City, CA. 25. Leelataviwat, S., Goel, S., Stojadinovic, B. (1998). “Drift and yield mechanism based seismic design of structures”, Proceedings Sixth U.S. National Conference on Earthquake Engineering, EERI, Oakland, California. 26. Bertero, R. and Bertero, V. (1992). ” Tall Reinforced Concrete Buildings: Development of Conceptual Seismic-Resistant Design Methodology". Report UCB/EERC 92/6, U.C. Berkeley, USA. August 1992. 27. Bertero, R. (2001). “Diseño Sismorresistente basado en la Performance”. PhD thesis. Universidad de Buenos Aires. Argentina. 28. Bertero, V. (1980). “Lessons Learned From Structures Damaged in Recent Earthquakes”, Proceedings of 7 WCEE, Tomo 4, 257-264. 29. Bertero, V. (2000). “Performance-Based Seismic Engineering: Conventional Vs.Innovative Approaches”. Proceedings of 12 WCEE. Auckland, New Zealand.