Instrumentación y Control de un Banco de Ensayos de Tanques
Anuncio

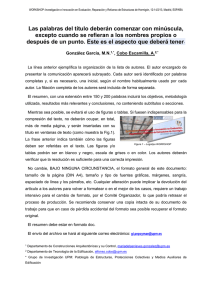
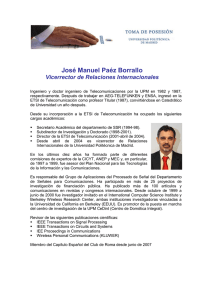
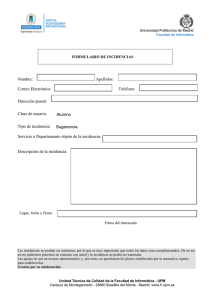
Instrumentación y Control de un Banco de Ensayos de Tanques Estabilizadores Pasivos ". La contribución de la adquisición de datos y el procesamiento rápido y eficaz de los mismos, permitió entre otras cosas, la publicación y la divulgación ante la comunidad científica de un nuevo experimento..." - Elkin Botia Vera, UPM.ETSI Navales- Grupo CEHINAV El Reto: Lea el Caso Control y adquisición de datos de un banco para tanques estabilizadores pasivos, dispositivos auxiliares de navegación ampliamente usados en el sector naval , este banco de ensayos debe contar con una adecuada descripción del movimiento, adquisición y procesamiento de datos, así como de Estudio rutinas de control y flexibilidad en cuanto a la configuración del experimento en cuestión, pudiéndose conseguir hasta tres experimentos distintos con Completo unos pocos cambios en hardware y software. La Solución: Integrar todos los equipos de medida y actuadores con un software fácil e intuitivo , centralizar la toma de datos y reducir las tareas de control y adquisición a un panel de operaciones global, versátil y fácilmente modificable según el experimento en cuestión Autor(es): Elkin Botia Vera - UPM.ETSI Navales- Grupo CEHINAV Antonio Souto Iglesias - UPM.ETSI Navales- Grupo CEHINAV 1. INTRODUCCION Los movimientos de los barcos y su control han sido objeto de numerosos estudios e investigaciones a lo largo de los años. Un barco navegando está sujeto a desplazamientos y giros en varios grados de libertad que pueden reducir su velocidad operativa y ser incómodos e incluso peligrosos para la tripulación, la carga, etc. Un tanque estabilizador pasivo utiliza el movimiento transversal de un líquido, como por ejemplo agua, para producir una fuerza que se oponga a la acción de las olas y así reducir los movimientos de balance antes mencionados. La estructura primaria considerada es un banco de ensayos que a su vez soporta un tanque rectangular que se mueve con un grado de libertad. 2. EL BANCO DE ENSAYOS La característica de diseño más importante radica en la versatilidad que debe tener el banco de ensayos para alternar de manera rápida y sencilla entre tres experimentos a saber: Roll : Movimiento de balance de un barco simulado mediante un movimiento alternativo impuesto por un mecanismo biela manivela en el banco de ensayos, la amplitud y el periodo de oscilación son modificables mediante un motor y el uso de un variador de frecuencia controlado por ordenador, la respuesta del tanque estabilizador es medida con un torsiometro en el eje, de igual modo se registra la amplitud del movimiento mediante dos encoders incrementales, este movimiento a su vez se sincroniza con una cámara fotográfica y una cámara de video para el posterior tratamiento de imágenes.( ver figura1) Coupling :interacción entre el movimiento de rotación del modelo de ensayos con un grado de libertad y el momento externo perturbador originado por un peso móvil que se desplaza a lo largo de una guía lineal con un periodo y amplitud modificables mediante el ordenador, a diferencia del anterior el movimiento no es forzado por un mecanismo, el eje está libre y la respuesta dinámica del sistema es la interacción entre las fuerzas inerciales tanto del modelo como del agua en cuestión, se hacen medidas de posición tanto del modelo como del peso móvil, este movimiento también es sincronizado con una cámara fotográfica y una cámara de video para el posterior tratamiento de imágenes. Nos centramos en el caso particular cuando la frecuencia de resonancia de la estructura primaria wo es igual a la primera frecuencia que perturba el líquido w1. En este caso, la acción del agua queda en evidencia al amortiguar el movimiento.( Ver figura2) Fluid-Solid Interaction : Interacción entre las fuerzas originadas por el movimiento del fluido dentro del tanque y las paredes y/o obstáculos presentes en el experimento, el movimiento del fluido al colisionar con las paredes produce el fenómeno conocido como presión de impacto, este fenómeno es registrado a 20 Khz, rango en que ocurre este fenómeno, mediante sensores de presión de alta frecuencia ubicados en las paredes laterales del tanque, en el caso de los obstáculos la característica mas importante es la deformación del mismo producida por el agua, dicha deformación se calcula mediante tratamiento de imágenes y se compara con modelos computacionales. 3. CONFIGURACION Para conseguir lo anterior se ha hecho uso de un ordenador INTEL CORE 2 Dúo de 1.87 GHz y 2 Gb de ram, con windows XP SP2 2002, una tarjeta I/O NI DAQ MX PCI 6221 37 pines y el uso del software también de NI LabVIEW 8.20 y DIAdem 10.1. Ver figura3 En la configuración hardware del sistema tenemos el control de posición mediante un Motoreductor y controlador de Maxon Motors modelos EC40 120W, GP42C, encoder HEDL 5540 y controlador EPOS 6010, un control de velocidad para un motor de corriente alterna mediante un variador de la firma SEW eurodrive modelo S60. Adquisición de datos a alta frecuencia (20 Khz) para sensores de presión KULITE semiconductor XTL-190 y ENDEVCO modelo 8510B, también se registra la medida de un Torsiometro de HBM modelo TB1A-200 Se usan dos encoders de la firma Heidenhain modelo ERN 120 y modelo ROD 426 y un encoder de hilo de DPF modelo HLS-S 500 para describir el movimiento del sistema y sincronizar con la cámara de fotografía CANON EOS 450D y la cámara de video alta velocidad y fotografía CASIO F1. Todo esto ha sido posible mediante el uso del entorno de programación de LabVIEW y la compatibilidad del hardware de NI con los sensores y actuadores existentes, todo dentro de un entorno fácil e intuitivo, para el procesamiento de datos se uso la herramienta DIAdem 10.1 también de NI. En lo que respecta a la tarjeta de adquisición de datos se ha hecho uso de puertos analógicos con registros a alta frecuencia (20 KHz) para los sensores de presión y el torsiometro, contadores para los encoders usando el reloj analógico, puertos E/S para el inicio del movimiento, disparador automático de la cámara fotográfica, inicio de la cámara de video y control de velocidad del motor. La aplicación ha generado importantes avances en los proyectos de investigación en los cuales está enmarcado el grupo CEHINAV dentro de la línea de tanques estabilizadores, la versatilidad de la configuración ha permitido realizar múltiples experimentos de enfoques distintos en cortos periodos de tiempo, a su vez la inclusión de importantes publicaciones en revistas y congresos de interés internacional, es importante destacar la obtención de excelentes resultados con hardware de bajo coste. Conclusión: Se han generado importantes avances en el entendimiento del comportamiento de los tanques estabilizadores pasivos y en la validación de software propio del centro de investigación. La contribución de la adquisición de datos y el procesamiento rápido y eficaz de los mismos, permitió entre otras cosas, la publicación y la divulgación ante la comunidad científica de un nuevo experimento en cuestión, cuyo impacto esperamos sea de interés en mejoramiento de las aplicaciones navales ya existentes. Información del Autor: Elkin Botia Vera UPM.ETSI Navales- Grupo CEHINAV España [email protected] (mailto:[email protected]) 1/3 www.ni.com Figura 1 “Descripción del equipo” Figura 2 “Detalle del sistema de peso móvil” 2/3 www.ni.com Figura 3 “Software de control del equipo” Legal Este caso de estudio (este "caso de estudio") fue desarrollado por un cliente de National Instruments ("NI"). ESTE CASO DE ESTUDIO ES PROPORCIONADO "COMO ES" SIN GARANTÍA DE NINGUN TIPO Y SUJETO A CIERTAS RESTRICCIONES QUE SE EXPONEN EN LOS TÉRMINOS DE USO EN NI.COM. 3/3 www.ni.com