- Ninguna Categoria
anteproyecto de grado - Universidad San Buenaventura
Anuncio
RAE 1. TIPO DE DOCUMENTO: Trabajo realizado sobre el Sistema de demostración realizado para la empresa P&R Neumática Ltda. 2. TITULO: DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE DEMOSTRACIÓN AUTOMATIZADO PARA PRODUCTOS DE MANIPULACIÓN, BANDA DE TRANSPORTE Y VISIÓN, PERTENECIENTE A P&R NEUMÁTICA LTDA. 3. AUTOR: Hugo Armando Galeano Valbuena, David Mauricio Mendieta Moreno. 4. LUGAR: Bogotá 5. FECHA: Julio 2011 6. PALABRAS CLAVE: ACTUADOR ROTATIVO, BANDA TRANSPORTADORA, DISPLAY, PLC, SENSORES. 7. DESCRIPCIÓN DEL TRABAJO: El presente trabajo presenta el diseño y construcción de un sistema que muestra de forma automatizada productos de manipulación, bandas de transporte, para la empresa P&R Neumática Ltda. 8. LINEA DE INVESTIGACIÓN: El proyecto está enfocado en el campo de la automatización, el cual está comprendido en el campo de la investigación de automatización de procesos y pertenece a la facultad de ingeniería bajo la sublínea de investigación de tecnologías actuales. 9. FUENTES CONSULTADAS: LOPEZ, Agustín. Cintas transportadoras. Madrid: DOSSAT, 2002. MARKS. Manual del ingeniero mecánico. México: McGraw Hill, 1999. SHIGLEY, Joseph; y MISCHKE, Charles. Diseño en ingeniería mecánica. México: McGraw Hill,2002. POSSE Edwin, Diseño y Simulación de una Maquina Ensiladora Tesis 2006. Mac VALVES serie 400 Descripción http://www.macvalves.com/support/catalogs_files/NT.pdf[en línea] [Consulta: 12 de Mayo de 2011], TPC MECHATRONICS serie PC Descripción http://www.tpcpage.com/products/products.asp[en línea] [Consulta: 12 de Mayo de 2011]. ALPHA ACTUATORS serie DA Descripción http://www.tpcpage.com/products/products_view.asp?pno=264&Bigno=3&Midno=82[en línea] [Consulta: 14 de Mayo de 2011] AR VACUUM serie K Descripciónhttp://www.arvacuum.com/informacion_tecnica.php?ids=4&idc=1[en línea] [Consulta: 12 de Mayo de 2011] PLC SERIE XC3 14E/10S Descripción http://www.ab.com/programmablecontrol/plc/micrologix/index.htmlb[en línea] [Consulta: 16 de Mayo de 2011] 10. CONTENIDOS: En este trabajo se encuentra el planteamiento de un problema que surge en la empresa P&R Neumática Ltda. Y como respuesta el proyecto denominado DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE DEMOSTRACIÓN AUTOMATIZADO PARA PRODUCTOS DE MANIPULACIÓN, BANDA DE TRANSPORTE Y VISIÓN, PERTENECIENTE A P&R NEUMÁTICA LTDA. Para dar solución a dicho problema. 11. METODOLOGIA: El método usado en este trabajo se basa en el enfoque de diseño y construcción del dispositivo de muestra partiendo del estudio realizado acerca de los factores que influyen en la selección de una marca realizado para P&R Neumática Ltda. 12. CONCLUSIONES: Con esta propuesta se buscó que mediante la implementación del dispositivo de demostración en P&R Neumática Ltda. Se incrementara el número de interesados en los productos de la empresa, incrementando considerablemente las ventas de P&R Neumática Ltda. DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE DEMOSTRACIÓN AUTOMATIZADO PARA PRODUCTOS DE MANIPULACIÓN, BANDA DE TRANSPORTE Y VISIÓN, PERTENECIENTE A P&R NEUMÁTICA LTDA. HUGO ARMANDO GALEANO VALBUENA [email protected] 2005116686 DAVID MAURICIO MENDIETA MORENO [email protected] 20051166068 UNIVERSIDAD DE SAN BUENAVENTURA FACULTAD DE INGENIERÍA INGENIERÍA MECATRÓNICA BOGOTÁ 2011 DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE DEMOSTRACIÓN AUTOMATIZADO PARA PRODUCTOS DE MANIPULACIÓN, BANDA DE TRANSPORTE Y VISIÓN, PERTENECIENTE A P&R NEUMÁTICA LTDA. HUGO ARMANDO GALEANO VALBUENA [email protected] 2005116686 DAVID MAURICIO MENDIETA MORENO [email protected] 20051166068 PROYECTO DE GRADO UNIVERSIDAD DE SAN BUENAVENTURA FACULTAD DE INGENIERÍA INGENIERÍAMECATRÓNICA BOGOTÁ 2011 -2- DEDICATORIA Hugo Armando Galeano Valbuena El conocimiento no es más que el conjunto de nociones e ideas que tenemos sobre una materia y la sabiduría es la profundización de dicho conocimiento adquirido a través del estudio y la experiencia, es por esto que dedico este trabajo primeramente a Dios que mediante su inspiración divina siempre me mantuvo firme en mis convicciones y me dio la fortaleza para no decaer cuando la adversidad se hacía presente, a mi madre por creer en mi incondicionalmente y darme su apoyo siempre, a mi padre por confiar en mi incluso cuando yo dudaba de mis propias capacidades, a mis hermanas por brindarme todo su apoyo y porque siempre en ellas encontré esa palabra de aliento necesaria para continuar, a mis amigos cercanos que me dieron ánimos y aportaron siempre su granito de arena durante mi carrera, a todas aquellas personas que intervinieron en el proceso de formarme como persona y como profesional porque al final del camino te das cuenta que lo único que te queda son las personas que están a tu lado , aquellos que sin importar la circunstancia y el contexto estarán dispuestos a darte la mano y a mí mismo porque este documento es la prueba que necesitaba de que puedo culminar lo que sea indiferentemente de si me agrada o no sin perder mi esencia en el proceso. David Mauricio Mendieta Moreno. "Y todos tus hijos serán enseñados por Jehová; y se multiplicará la paz de tus hijos.” Isaías 54:13… a Dios porque nunca nos ha faltado y me ha acompañado en este largo y difícil camino, sin la voluntad de él no estaríamos aquí, a mis padres que con su amor y apoyo nunca han dejado de creer en mí, que siempre me han infundido que el trabajo duro y el esfuerzo dan buenos resultados, a esos valores que desde pequeño me inculcaron y que de muchas formas han dado fruto, a mi hermana y hermano y sus respectivas familias que estuvieron pendientes incondicionalmente en este proceso de realización personal como profesional, a mis amigos que siempre estuvieron ahí en las buenas y las malas (Carlos, Juan José, Julián y Karen), a mi amigo de tesis Hugo que con su constancia, dedicación, paciencia, tolerancia y demás virtudes me apoyaron desde que nos conocimos, a los que ya no están y siempre quisieron ver este sueño hecho realidad y a todos los que olvide nombrar que de alguna u otra forma fueron agentes activos en esta etapa de mi vida. Dedicatoria especial a P&R Neumática Ltda. -3- CONTENIDO pág. INTRODUCCIÓN 12 1. PLANTEAMIENTO DEL PROBLEMA 13 1.1 Antecedentes 13 1.1.1 Antecedentes de sistemas de Visión Artificial 13 1.1.2 Antecedentes de sistemas de Bandas transportadoras 13 1.1.3 Antecedentes de sistemas de posicionamiento mediante vacío 14 1.2 Formulación del problema 14 1.3 Justificación 15 1.4 Objetivos 17 1.4.1 Objetivo general 17 1.4.2 Objetivos específicos 17 1.5 Alcances y limitaciones del proyecto 17 1.5.1 Alcances 17 1.5.2 Limitaciones 18 2. MARCO DE REFERENCIA 19 2.1 Marco conceptual 19 2.2 Marco teórico 19 2.2.1 Banda transportadora 19 2.2.2 Aire comprimido 31 2.3 Conceptos básicos de la neumática 37 -4- pág. 2.3.1 Estructura de los sistemas neumáticos. 40 2.4 Actuadores neumáticos 42 2.5 Válvulas de vías 45 3. METODOLOGÍA 52 3.1Enfoque de la investigación 52 3.2 Línea de investigación 52 3.3 Hipótesis 52 4. DESARROLLO INGENIERIL 53 4.1 Descripción del proceso 53 4.1.1 Componentes 53 4.2 Diseño banda transportadora 54 4.2.1 Diseño banda transportadora para una materia prima (trigo) 54 4.2.2 Selección del ancho de banda y velocidad 54 4.2.3 Selección de rodillos 55 4.2.4 Cálculos de reacciones en las bandas 56 4.3 Diseño de la banda transportadora para el sistema tipo Display 58 4.3.1 Selección del ancho de banda y velocidad. 58 4.3.2 Cálculos de reacciones en las bandas en el sistema tipo Display 59 4.3.3 Selección de rodillos tipo Display 60 4.4 Rodamiento de la esfera en un plano inclinado 61 4.5 Escogencia de los actuadores neumáticos 62 -5- pág. 4.5.1 Cálculo de La ventosa 62 4.5.2 Selección del generador de vacío 64 4.5.3 Selección del actuador rotativo 64 4.5.4 Diseño del receptáculo 66 4.5.5 Diseño guía de las bandas 67 4.5.6 Montaje completo de la maquina tipo Display 68 4.5.7Piezas de la maquina tipo Display 71 4.5.8 Sistema de alimentación maquina tipo display. 72 5. PROGRAMA DEL PLC 75 5.1 Estrategia de programacion 75 5.2 Diagrama de flujo 76 5.3 Programa en listado de instrucciones 77 5.4Código PLC 77 6. CONCLUSIONES 81 7. BIBLIOGRAFÍA 82 -6- LISTA DE TABLAS pág. Tabla 1 Estudio de los Factores de escogencia de un producto de los clientes de P&R Neumática Ltda. 15 Tabla 2 Ancho de banda en función del tamaño del material 25 Tabla 3 Cálculo de la velocidad (en m/minuto) 26 Tabla 4 Calculo de la capacidad 27 Tabla 5 Coeficiente f 28 Tabla 6 Factor de accionamiento K 29 Tabla 7 Descripción detallada de los elementos a usar. 50 Tabla 8 Descripción detallada ventosa a usar 64 -7- LISTA DE FIGURAS pág. Figura 1. Constitución de una cinta elemental. 20 Figura 2. Disposición de rodillos sobre una cinta. 21 Figura 3. Diagrama de la banda. 22 Figura 4. Coeficiente en función de la longitud. 23 Figura 5. Diagrama de tensiones de la banda. 24 Figura 6. Estación tensora de husillo. 25 Figura 7. Dimensiones de las bandas. 26 Figura 8. Diagrama de tensiones de una cinta horizontal. 28 Figura 9. Determinación de T3=T4 en cinta inclinada. 29 Figura 10. Diagrama fricción por rodadura. 31 Figura 11. Compresor de émbolo de dos etapas. 33 Figura 12. Turbocompresor axial. 34 Figura 13. Unidad de mantenimiento. 37 Figura 14. Sistema neumático para alimentación de piezas. 38 Figura 15. Estructura de un sistema neumático. 40 Figura 16. Distribución de la presión del aire. 41 Figura 17. Cilindro de simple efecto. 43 Figura 18. Cilindro de doble efecto. 43 Figura 19. Cilindro de doble efecto con amortiguación de final de carrera. 44 Figura 20. Válvula de 3/2 vías, cerrada en reposo, asiento de plato. -8- 46 pág. Figura 21. Válvula de 3/2 vías, accionada neumáticamente, cerrada en reposo. 46 Figura 22. Válvula de 3/2 vías con rodillo, servo pilotada, cerrada en reposo. 47 Figura 23. Válvula de 5/2 vías, válvula de asiento. 48 Figura 24. Diagrama Ventosa Movimiento Vertical. 48 Figura 25. Diagrama Ventosa Movimiento Horizontal. 49 Figura 26. Diagrama esfera plano inclinado. 50 Figura 27. Diagrama esfera en movimiento plano inclinado. 50 Figura 28. Diagrama total de fuerzas que actúan sobre la esfera. 51 Figura 29. Diagrama Distancia ventosa respecto al eje de giro del brazo. 65 Figura 30. Curva de momento de inercia vs tiempo. 66 Figura 31. Diagrama receptáculo diseñado. 67 Figura 32.Receptáculo diseñado. 67 Figura 33. Diagrama guía de la banda. 68 Figura 34. Maquina Tipo Display. 68 Figura 35. Vista Superior Maquina Tipo Display. 69 Figura 36. Piezas Maquina Tipo Display. 70 Figura 37. Maquina Tipo Display. 71 Figura 38. Diagrama neumático. 73 Figura 39. Instalaciones neumáticas A P&R Neumática 73 Figura 40. Instalaciones neumáticas B P&R Neumática 74 -9- LISTA DE ANEXOS pág. Anexo 1. Ficha técnica Mac VALVES serie 400 83 Anexo 2. Ficha técnica TPC MECHATRONICS serie PC 84 Anexo 3. Ficha técnica TPC MECHATRONICS serie AX 85 Anexo 4. Ficha técnica TPC MECHATRONICS serie KLI 86 Anexo 5. Ficha técnicaTPC MECHATRONICS serie TUB 87 Anexo 6. Ficha técnica TPC MECHATRONICS serie CF 88 Anexo 7. Ficha técnica ALPHA ACTUATORS serie DA 89 Anexo 8. Ficha técnica AR VACUUM serie K 90 Anexo 9. Ficha técnica cámara de visión artificial 91 Anexo 10. Ficha técnica del PLC 92 Anexo 11-A. Programa en listado de instrucciones 93 Anexo 11-B. Programa en listado de instrucciones 94 Anexo 11-C. Programa en listado de instrucciones 95 Anexo 11-D. Programa en listado de instrucciones 96 Anexo 12. Planos 97 Anexo 13. Soportes P&R Neumática Ltda. - 10 - 117 GLOSARIO ACTUADOR ROTATIVO: Dispositivo inherentemente mecánico cuya función es proporcionar fuerza para mover o “actuar” otro dispositivo mecánico. La fuerza que provoca el actuador proviene de la Presión neumática, y hace que genere un movimiento rotativo. BANDA TRANSPORTADORA: diferentes productos. Mecanismo encargado del transporte de DISPLAY: Dispositivo usado para mostrar o dar a conocer algo. ESFUERZOS: Fuerzas de reacción por unidad de superficie a las que está sometido un cuerpo en equilibrio mecánico. MECANISMO: Estructura interna que hace funcionar los diferentes dispositivos MOTOR: Máquina que produce un movimiento a partir de una fuente de energía. PISTON: Mecanismo que convierten la energía del aire comprimido en trabajo mecánico PLC: (controlador lógico programable), es la unidad de control mínima en un proceso automatizado; Con el cual se pueden programar eventos resultantes de acuerdo a un estado específico del sistema. RACOR: Pieza metálica roscada, que sirve para unir tubos u otros perfiles cilíndricos. SENSORES: Dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. - 11 - INTRODUCCIÓN Los sistemas de demostración constituyen una parte vital en el desarrollo de nuevos proyectos permitiendo conocer las funciones de los dispositivos con los que se cuenta en la actualidad, para su posterior implementación en maquinaria de toda índole, P&R NEUMÁTICA Ltda. Como representante exclusivo para Colombia de la compañía MAC VALVES INC, empresa líder en el desarrollo y construcción de productos neumáticos, cuenta con una gran variedad de productos de última generación que no son muy conocidos en la industria. Sistemas de posicionamiento haciendo uso de eyectores de vacío, ventosas y actuadores rotativos, se posicionan como algunos de los más eficientes en la industria actualmente así como la implementación de la visión artificial como una estrategia para asegurar el mejoramiento continuo de la calidad. El propósito de este proyecto es aportar el diseño y construcción de un sistema que muestra de forma automatizada productos de manipulación, bandas de transporte y visión,que brinde seguridad en su diseño por medio del desarrollo ingenieril, además de satisfacer las necesidades de P&R NEUMÁTICA Ltda. y cumplir con los estándares de calidad de esta. - 12 - 1. PLANTEAMIENTO DEL PROBLEMA 1.1 ANTECEDENTES Los sistemas de demostración son usados por las grandes empresas que desarrollan y producen diferentes tipos de piezas y dispositivos para la industria. La implementación de estos sistemas surge de la necesidad que tienen las compañías de mostrar sus productos a los potenciales clientes, dichos sistemas incorporan el uso de diversas tecnologías para mostrar de una forma llamativa y atrayente sus desarrollos y estar a la vanguardia del mercado. 1.1.1 Antecedentes de sistemas de Visión Artificial Según la AutomatedVisionAssociation, la visión por computadora (Machine Vision) se define como la utilización de dispositivos de detección óptica, sin contacto, para recibir e interpretar automáticamente una imagen de una escena real, con el fin de obtener información o controlar computadores o procesos. Partiendo de esta definición, podemos afirmar lo siguiente: La visión por computador es automática y funciona sin intervención humana. La visión por computador es una forma de detección sin contacto Los resultados de la visión por computador pueden utilizarse para controlar un proceso o una actividad Desde sus inicios la visión por computador ha inspirado sus desarrollos en el estudio del sistema visual humano el cual sugiere la existencia de diferentes tipos de tratamiento de la información visual dependiendo de metas u objetivos específicos, es decir, la información visual percibida es procesada en distintas formas con base en las características particulares de la tarea a realizar, por lo que la visión por computador propone varias técnicas que permiten obtener una representación del mundo a partir del análisis de imágenes obtenidas desde cámaras de video. 1.1.2 Antecedentes de sistemas de Bandas transportadoras Este dispositivo consiste en un sistema de transporte continuo formado básicamente por una banda continua que se mueve entre dos tambores. La banda es arrastrada por fricción por uno de los tambores, que a su vez es accionado por un motor. El otro tambor suele girar libre, sin ningún tipo de accionamiento, y su función es servir de retorno a la banda. La banda es soportada por rodillos entre los dos tambores. Esta misma tecnología se usa en dispositivos de transporte de personas tales como cintas y escaleras mecánicas y en muchas cadenas de montaje industriales. Las tiendas suelen contar con cintas transportadoras en las cajas para desplazar los artículos comprados. Las estaciones de esquí también usan cintas transportadoras para remontar a los esquiadores. La cinta transportadora más larga del mundo está en el Sáhara Occidental, tiene 100 km de longitud y va desde las minas de fosfatos de BuCraa hasta la costa sur - 13 - de El Aaiún. La cinta transportadora simple más larga tiene 17 km y se usa para transportar caliza y pizarra desde Meghalaya (India) hasta Sylhet (Bangladesh). 1.1.3 Antecedentes de sistemas de posicionamiento mediante vacio Se define como vacio al estado de un gas cuya presión es inferior a la presión atmosférica. El vacío ideal o teórico es la ausencia total de esta atmósfera, 0 bar absolutos o -1 bar relativo. Los sistemas que hacen uso del vacío para manipular y posicionar objetos son denominados sistemas de posicionamiento mediante vacio. Dichos sistemas utilizan ventosas para generar vacio contra una superficie pudiendo manipularla. Taxonomía del vacío en función del grado de vacío. • BAJO VACIO: 0-20%, ventilación, refrigeración, aspiración de gases y humos, transporte de materiales pulverulentos.... • VACIO INDUSTRIAL: 20-99%, Para elevación, manipulación, automatización, envasado al vacío... • VACIO DE PROCESOS O ALTO VACIO: >99%, laboratorios de farmacia, industrias de alta tecnología electrónica, energía nuclear, astronáutica... Sistemas de este tipo han sido usados en la industria principalmente en las líneas de ensamble donde es requerido mover grandes cargas, empresas como Mitsubishi, Toyota entre muchas otras han implementado estos sistemas, en sus líneas automatizadas de ensamble. 1.2 FORMULACIÓN DEL PROBLEMA Los sistemas de demostración constituyen una parte importante en la industria ya que permiten dar a conocer las nuevas tecnologías y dispositivos y muestran el potencial de estos Actualmente en Colombia son pocos los sistemas de demostración que se exhiben lo que hace que exista un mayor desconocimiento por parte de las industrias locales de las nuevas tecnologías y las posibilidades que estas brindan para sus empresas , de ahí surge la pregunta ¿cómo realizar un dispositivo de demostración atractivo a la industria, que integre las nuevas tecnologías de bandas de transporte y elementos de acción neumática en el ámbito de la automatización industrial?, y para eliminar este inconveniente es que se busca elaborar y construir una máquina de demostración capaz de captar la atención de esta parte de la sociedad mostrándolos nuevos dispositivos con los que se cuenta. - 14 - 1.3 JUSTIFICACIÓN La realización de este proyecto permite incrementar las ventas de los productos de la empresa P&R Neumática Ltda. Frente a otras empresas tal como se demuestra en una estudio de factores y preferencias de los ingenieros en el momento de adquirir un producto, … Véase Tabla 1 … donde se tomaron los factores de precio, marca, funcionalidad, procedencia y display o sistema de demostración siendo este último el que resulta ser más influyente a la hora de adquirir algún producto. Tabla 1. Estudio de los Factores de escogencia de un producto de los clientes de P&R Neumática Ltda. Factor de escogencia de un producto empresa contacto Colcafe ing. Carlos A Duarte almacenes éxito Sr Edwin Villagrán GM Colmotores Ing. Néstor Sachica industrias Humcar Ing. Juan C Peña Italcol Ing. Fabio Martínez Mazda Ing. Wilson Pérez Coca-Cola Ing. Gustavo Losada duquesa Ing. Luis C McNish Tintorería universal Ing. Alejando Leguizamón Icollantas Ing. Jairo moreno Colpapel Ing. Jorge Ruiz Cemex Ing. David Cruz Cristalería Peldar Ing. Pablo Hernández Filmtex Ing. Andrés Velasco Ajover Ing. Pedro Rada Alfagres Ing. Edgar zapata Colceramica Ing. Cesar Méndez Bavaria Ing. Hugo Romero Gaseosas Ing. Rubén Pinilla Teléfon o 292288 0 570750 0 740011 1 564646 4 422136 0 596296 4 423934 0 593644 4 785442 6 780680 0 247270 7 700458 1 696205 9 725640 0 417862 0 724851 6 294140 0 269659 9 724560 - 15 - Preci o Marc a Funcionalida d Procedenci a Displa y x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x Colombiana 0 carbones el cerrejón ing. Ma luisa Caro Protabaco ing. Gustavo Manrique el tiempo ing. Gerardo casas Cosmeticos Vogue ing. John Lozano Amcor ing. Marcos Moncada Eternit ing. Elkin Peinado Pinturas Tonner ing. Manuel medina Kellogg´s ing. Ricardo Ochoa Incodepf ing. Rosendo Guali Congelagro Ing. Carlos Chingate 293026 6 540751 4 418615 4 770000 0 233859 4 298434 9 468906 9 289279 4 560254 2 724770 0 x x x x x x x x x x x x x x x x x Fuente: Autores El mostrar los productos cuya implementación en una empresa genera un aumento en el nivel de producción y una reducción en los costos de fabricación, elevando los niveles de competitividad en el mercado nacional e internacional, mediante una máquina de demostración tipo display permite a P&R Neumática Ltda. Estar a la vanguardia del mercado incrementando así sus ganancias. - 16 - 1.4 OBJETIVOS 1.4.1 Objetivo general. Diseñar y construir un dispositivo automático dedemostración atractivo a la industria, que exponga los productos de acción neumática, tratamiento de aire, elementos de vacío, banda de transporte y visión, con el uso de las marcas representativas de la empresa P&R Neumática Ltda. 1.4.2 Objetivos específicos. El diseño comprende: los planos, la selección de los elementos, el programa de operación del PLC y la construcción del sistema de demostración tipo display: * Diseñar e implementar un sistema de banda transportadora. * Plantear un sistema de retroalimentación para el sistema de demostración tipo display. * Diseñar un sistema de selección y clasificación de esferas didácticas mediante un algoritmo de selección de esferas desarrollado con el software entregado por P&R Neumática Ltda. * Realizar puesta a punto del sistema de demostración tipo display. * Realizar puesta a en marchar del sistema de demostración tipo display. 1.5 ALCANCES Y LIMITACIONES DEL PROYECTO 1.5.1 Alcances. Con este proyecto, utilizando los recursos de la ingeniería mecatrónica, se incrementan las ventas actuales de los productos de la empresa P&R Neumática Ltda. Mediante el sistema de demostración tipo display. Al finalizar el proyecto se entrega: el diseño y construcción de la maquina tipo displayasí como programas, planos de conexiones, tipo de elementos e interface, la selección de los elementos y el programa de operación del PLC. 1.5.2 Limitaciones. Teniendo en cuenta que este proyecto será desarrollado con el patrocinio de la empresa P&R Neumática Ltda. Los materiales que se usan son - 17 - los suministrados por la empresa y los cálculos que se realizan es en base a estos mismos. Solo se puede programar en xingetplcmotion debido a que es el que probé la empresa,así como solo se pueden usar productos de las marcas de las cuales P&R Neumática Ltda. Es representante en Colombia como Mac VALVES, PHD, TCP, SNS, JELPC, ALPHA, AR VACUUM, V-TECH, SENSE, NYCOIL, SPE, HAITAMA VALVES, ICESA y MODIGON ya que son los únicos avalados por la empresa. - 18 - 2. MARCO DE REFERENCIA. 2.1 MARCO CONCEPTUAL Para el desarrollo de este proyecto es necesario seguir el proceso mediante el cual se tenga la certeza del cumplimiento de los objetivos propuestos, este proceso requiere, elección de piezas, desarrollo del programa, montaje del PLC prueba de funcionamiento del programa, construcción del sistema de demostración tipo displayy otros puntos que se Irán conociendo a medida que el proyecto se desarrolla. Se debe tener en cuenta que este proyecto estará al alcance de muchas personas, por esta razón se debe generar una entrada segura, y asegurarse que los operadores implicados en el usodesistema de demostración tipo displayno tendrán accidentes a causa del desarrollo del proyecto. 2.2 MARCO TEÓRICO 2.2.1Banda transportadora. Cintas transportadoras. Características a tener en cuenta para las cintas transportadoras: - Material (tamaño, friabilidad, peso específico, etc.). - Capacidad a transportar. - Disposición general de la instalación, o sea, espacio disponible, edificios existentes, configuración del terreno, etc.1 Elementos: - Grupo o cabeza motriz de accionamiento, cuyo tambor imprime el movimiento a la banda. - Cabeza o estación de retorno y tensado. - Rodillos superiores de soporte de la banda. - Rodillos inferiores. - Banda. - Bastidor soporte de los rodillos. - Zona de carga. Como consecuencia del desplazamiento de la banda, el material situado sobre la misma es transportado hasta el punto de vertido que generalmente es la cabeza motriz; la carga se realiza en las proximidades de la cabeza de reenvío, aunque puede haber otros puntos intermedios. Sistema de tensado: - De tensor de husillo Para longitudes de hasta 50 - 75 m. - De tensor de carro Para longitudes mayores - De tensor de contrapeso de 50 - 75 m. 1 LOPEZ, Agustín. Cintas transportadoras. Madrid: DOSSAT, 2002. p. 612. - 19 - Figura 1. Constitución de una cinta elemental. Fuente: Cintas transportadoras de LOPEZ ROA, AGUSTIN Trazado: - Horizontales. - Inclinadas (ascendentes o descendentes). - De trazado mixto (horizontal e inclinado, con zonas curvas de transición). La grafica…Véase Figura 2…, muestra la disposición general de tales rodillos sobre una cinta, así como la distancia o paso de los mismos. Dada la gran importancia que tienen los rodillos de una cinta, han sido objeto de normalización por casi todos los Organismos Nacionales de Normalización (Normas DIN, AFNOR, etc.) y, recientemente, por la FEM (Federación Europea de la Manutención). La normalización se refiere a las medidas exteriores, con el propósito de lograr una intercambiabilidad entre los rodillos correspondientes a un mismo ancho de banda, pero no obliga a nada respecto a la disposición interna. - 20 - Figura 2. Disposición de rodillos sobre una cinta. Cintas transportadoras de LOPEZ ROA, AGUSTIN En los rodillos hay que considerar como muy importantes los siguientes puntos: - Capacidad de carga de los mismos, función del rodamiento elegido. - Estanqueidad, para evitar que la humedad y el polvo penetren en el rodamiento y reduzcan su vida, contaminando la grasa. - Coeficiente de fricción, que depende del sistema de estanqueidad elegida, tipo de grasa y temperatura ambiente. Bandas. Puede decirse que la banda es el elemento más importante de una cinta; el porcentaje de su costo respecto al total puede llegar a representar hasta el 60 %. Están constituidas por una parte resistente (armadura o carcasa), impregnada y recubierta de goma. A consecuencia de su íntima ligazón, los alargamientos son iguales en la carcasa y en los recubrimientos, y puesto que tensiones específicas son proporcionales a los módulos de elasticidad, la armadura es la que soporta prácticamente todo el esfuerzo. Teoría general de cintas transportadoras.2 Esfuerzo tangencial y potencia compuestos por la elevación de la carga y el desplazamiento de la misma. El esfuerzo correspondiente a la elevación de la carga se determina fácilmente considerando la gráfica …Véase Figura 3…. La componente a lo largo de la banda, es (1) Siendo: PM= Peso total sobre la longitud L. pM = Peso del material (Kg/m), y H = Desnivel (m). 2 LOPEZ, Agustín. Op. Cit., p. 619. - 21 - Para determinar el esfuerzo producido por el deslizamiento de la carga, basta simplemente aplicar la ley del rozamiento. (2) Figura 3. Diagrama de la banda. Cintas transportadoras de LOPEZ ROA, AGUSTIN En este caso, P se compone de: Peso del material: PM = pM L. Peso de la banda: PB = 2pB L. Peso de las partes móviles: Rodillos superiores e inferiores, expresado en Kg/m., o sea, ps y pi respectivamente. (3) Normalmente, el dato que se conoce no es PM sino el número de toneladas transportadas por horas, QM Poniendo PM en función de QM y de la velocidad, que es otro de los datos, se tiene: (4) Viniendo expresado QM en T/h y v en m/s. Y sustituyendo en la ecuación, resulta: ( ) (5) El esfuerzo tangencial FT será la suma de FE Y FF' o sea: ( ) ( ) (6) , es la suma de todas las partes móviles; la designaremos por PM. La anterior expresión, es puramente teórica y no tiene en cuenta las perdidas por fricción originadas en los tambores; pueden valorarse aisladamente dichas pérdidas, haciendo la conversión adecuada en esfuerzo tangencial. Esta es otra forma de proceder, la cual, se lleva a cabo en el método de cálculo llamado de "resistencias separadas", pero aquí mencionaremos los métodos empleados por las normas DIN y por los fabricantes ingleses principalmente. El método seguido por los normas DIN, consiste en multiplicar el segundo término de la ecuación, por un coeficiente C variable con la longitud de la cinta; para cintas de poca longitud, dicho coeficiente es grande y por el contrario, tiende a la unidad para cintas largas. La función C = φ (L). Por tanto, la ecuación toma la forma final siguiente: - 22 - ( ) (7) Para determinar la potencia, basta simplemente multiplicar la ecuación por v/75, con lo que se obtiene:3 ( ) (8) Figura 4. Coeficiente en función de la longitud. Cintas transportadoras de LOPEZ ROA, AGUSTIN Arrastre en el tambor. Para que la banda se desplace a una velocidad igual a la tangencial del tambor, es necesario que exista una adherencia entre banda y tambor. Para lograr dicha adherencia debe existir una relación entre el coeficiente de fricción μ y los valores de FT, T1 Y T2 …Véase Figura 5…y el ángulo de arrollamiento θ. Los valores de las tensiones a la entrada y salida del tambor, los designamos por T1 y T2 respectivamente, siguiendo una norma universal. (9) Esta es la expresión práctica a emplear para calcular T1; los valores de, (10) Están tabulados para los valores más corrientes de θ y μ, por lo cual, conocido FT es fácil calcular T1 Y T2 = T1 – FT. A K suele llamársele coeficiente de transmisión 3 LOPEZ, Agustín. Op. Cit., p. 621. - 23 - Figura 5. Diagrama de tensiones de la banda. Cintas transportadoras de LOPEZ ROA, AGUSTIN Estudio de las cintas transportadoras. El diseño de una estación motriz viene definido por: - Angulo de arrollamiento θ. Nunca debe ser menor de 180° - Diámetro del tambor. Es función del número de telas de la banda. - Grupo motriz de accionamiento. Está constituido por el reductor, motor y acoplamientos. Cabeza o estación de reenvió y tensora de husillo: La grafica…Véase Figura 6…muestra la disposición constructiva. El tensado se realiza mediante los husillos de adecuada longitud para absorber los alargamientos de la banda. - 24 - Figura 6. Estación tensora de husillo. Cintas transportadoras de LOPEZ ROA, AGUSTIN La misión de las estaciones tensoras de husillo, es tensar adecuadamente la banda al comienzo de su funcionamiento y volver a tensarla posteriormente, cuando la misma vaya dando de sí; este alargamiento es rápido en los primeros días, estabilizándose después. Calculo de las cintas transportadoras. Selección del ancho de banda y velocidad. Conocidos el tonelaje horario a transportar, y las características del material, el primer paso a llevar a cabo es determinar el ancho de banda. Como regla general, el ancho de banda no debe ser menor de tres veces la dimensión mayor del mayor trozo a transportar; sus valores vienen dados en la siguiente tabla… Véase Tabla 2 …. Tabla 2. Ancho de banda en función del tamaño del material Cintas transportadoras de LOPEZ ROA, AGUSTIN - 25 - El "todo uno" es una mezcla de terrones y finos, en la que el 90 % es menor del tamaño máximo y el 75 % menor que la mitad del mismo. El siguiente paso es la elección de la velocidad de la banda. La misma es función, por un lado, de las características físicas del material. Tabla 3. Cálculo de la velocidad (en m/minuto) Cintas transportadoras de LOPEZ ROA, AGUSTIN Por otro lado, la velocidad a elegir es función de la capacidad horaria en metros cúbicos y de la sección transversal de la banda, según la conocida ecuación: (11) Las dimensiones recomendadas de la anchura que el material debe ocupar en la banda, para perfil en artesa o plano, vienen dadas por la expresión B1 = 0.9B – 0.05 (m). …Véase Figura 7… Figura 7. Dimensiones de las bandas. Cintas transportadoras de LOPEZ ROA, AGUSTIN La sección viene influenciada por el ángulo de la artesa; como ya se indicó, dichos valores están normalizados, siendo sus valores 20 y 30° para ternas, 15º para - 26 - binas y, por supuesto, la banda plana. La tendencia actual es hacia valores mayores (45º y más). Las capacidades en m3/h para una velocidad de 1 m/s., y las inclinaciones y secciones indicadas, … Véase Tabla 4 …. Cálculo de la potencia en el tambor. Los valores del coeficiente C citado en párrafos anteriores, engloban las llamadas resistencias secundarias, que son: - Fricción en las guías de carga. - Fricción en los cojinetes de todos los tambores, excepto el motriz. - Fricciones en los rascadores fijos y pendulares. En lo que respecto al coeficiente f, también citado, este engloba en realidad a otras varias fricciones, entre las que se encuentran principalmente: Tabla 4 Calculo de la capacidad Cintas transportadoras de LOPEZ ROA, AGUSTIN - Resistencia intrínseca de rodadura de los cojinetes de los rodillos. - Resistencia debida a las juntas (laberínticas o de fieltro), incluyendo la propia viscosidad de la grasa. - Resistencia debida a la huella producida por la banda sobre el rodillo. Los valores de este coeficiente dependen principalmente del tipo de estanqueidad y de la precisión en su ejecución, y son variables de uno a otro fabricante. Indicando algunos valores de referencia… Véase Tabla 5 …. - 27 - Tabla 5. Coeficiente f Cintas transportadoras de LOPEZ ROA, AGUSTIN Cálculo de las tensiones en la banda. Partiendo de la potencia en el tambor, calcularemos fácilmente el esfuerzo tangencial: (12) P = Potencia en C. V. v = Velocidad en m/s. Conocido este valor, a continuación se calculan las tensiones principales en las cintas, que universalmente se designan por T1, T2 y T3 = T4, Los valores de T1 y T2 se obtienen fácilmente en función de FT empleando coeficiente K, ya citado. Figura 8. Diagrama de tensiones de una cinta horizontal. Cintas transportadoras de LOPEZ ROA, AGUSTIN (13) Los valores de K para los tensores de husillo vienen dados en … Véase Tabla 6 …. - 28 - El valor de T3 ≅T4, en una cinta inclinada, se obtiene en función de T1 empleando la siguiente expresión. …Véase Figura 9… (14) Siendo la tensión de fricción en el ramal superior producida por el peso del material y la banda. Al mismo resultado se llega considerando las tensiones en el ramal de retorno de la banda, o sea, (15) Siendo TfBI la tensión de fricción en el ramal inferior, producida por el peso de la banda. Tabla 6. Factor de accionamiento K Cintas transportadoras de LOPEZ ROA, AGUSTIN Figura 9. Determinación de T3=T4 en cinta inclinada. Cintas transportadoras de LOPEZ ROA, AGUSTIN - 29 - En rigor, T3 no es igual a T4, consecuencia de la fricción en los cojinetes del tambor, pero en la práctica se consideran iguales. Observar en la gráfica …Véase Figura 9…, que las tensiones de fricción crecen en el sentido del movimiento. Para evitar derrame en la cinta por un valor calculado de T3, se efectúa un tensado con un valor mayor que T3, y que suele designarse por T0. El valor de To viene dado por: (16) Siendo: l = Distancia entre rodillos (m.). f = Flecha máxima permisible (m.). Generalmente, f está comprendido entre 1 % y 3 % de l, dependiendo del tipo de material a transportar. Cuando se toma To en vez de T3, los valores de T1 y T2 aumentan automáticamente en To - T3, lo cual garantiza una mayor adherencia. Tensado de la banda. El tensado se realiza mediante husillo; en estos casos no es posible controlar la tensión en la banda, y sólo la experiencia determina cuándo la misma es correcta. Fricción por rodadura. Con frecuencia se sustituye la fricción por deslizamiento por una acción de rodadura, como en caso de las ruedas de los vehículos, las bolas o los rodillos en los cojinetes, los rodillos colocados debajo de maderos al mover cargas; la resistencia de fricción en el movimiento por rodadura es sustancialmente menor que en el movimiento por deslizamiento. El coeficiente de fricción por rodadura fr=P/L, en donde L es la carga y P la resistencia por fricción.4 (17) La resistencia por fricción P a la rodadura de un cilindro bajo una carga L aplicada en el centro del rodillo…Véase Figura 10…es inversamente proporcional al radio r del rodillo; P=(k/r)L. Si se da r en pulgadas, los valores de k son como sigue: madera sobre madera dura, 0,02; hierro sobre hierro, acero sobre acero, 0.002; acero duro y pulido sobre acero duro y pulido, 0,0002 a 0,0004. Los datos de fricción por rodadura son escasos. Noonan y Strange dan, para rodillos de acero sobre placas de acero y para cargas que varían desde ligeras hasta aquellas que provocan una deformación permanente del material los siguientes valores de k: superficies bien acabadas y limpias, 0,0005 a 0,001; superficies bien aceitadas, 0,001 a 0,002; superficies cubiertas con sedimentos, 0,003 a 0,005; superficies herrumbrosas, 0,005 a 0,01. 4 MARKS. Manual del ingeniero mecánico. México: McGraw Hill, 1999. p. 13-58. - 30 - Figura 10. Diagrama fricción por rodadura. Fuente: Manual del ingeniero mecánico. Si se mueve una carga sobre rodillos, y si k y k´ son los coeficientes respectivos de fricción para las superficies inferior y superior, la fuerza de fricción. (18) 2.2.2 Aire comprimido. La contaminación se adquiere en el mismo momento en que se genera el aire comprimido, por esta razón analizaremos brevemente su generación, aunque no es intensión de este documento ser extensivo en este punto. El aire atmosférico es un gas incoloro, inodoro e insípido. Está constituido por una mezcla de gases, principalmente nitrógeno y oxígeno, entre otros. Algunos de los principales contaminantes se encuentran de forma natural suspendidos en el aire, tales como: vapor de agua y partículas sólidas (polvo, arena, hollín y cristales de diferentes sales). En las grandes ciudades, el número de estas partículas por metro cúbico, puede alcanzar la cifra de 500,000 partes/m3. Siendo el aire una mezcla, sus componentes pueden separarse. Si el aire es enfriado, sus diferentes componentes se separan por destilación fraccional. Qué contaminantes se encuentran en el aire comprimido y causan trastornos a nuestra maquinaria? * 140 millones de partículas sucias existen en cada m3 * 17 gramos de agua por m3 * Agentes abrasivos (aceites usados en la compresión del aire) * Óxido que se produce y desprende de la red de aire comprimido Preparación del aire comprimido Todas estas partículas contaminantes son aspiradas por el compresor y alimentadas a la línea de aire comprimido. La calidad del aire comprimido en el punto de consumo, viene definida por tres parámetros. - 31 - • Pureza, referida a la humedad y a la suciedad por partículas sólidas contenidas en el aire • Presión, referida al valor adecuado y constante • Lubricación, de acuerdo al área de aplicación La pureza del aire comprimido está influenciada por: • La calidad del aire de aspiración • Filtro de aspiración • Tipo de compresor utilizado • Mantenimiento del compresor • Separador de partículas sólidas contenidas • Refrigerador posterior • Sistemas de distribución de aire (tubería, disposición, etc.). El aire aspirado por el compresor, contiene una cantidad de agua en forma de vapor que depende de la temperatura y de la humedad relativa del ambiente. Los filtros de aspiración eliminan de un 96 a un 99 % del polvo y suciedad que contiene el aire, pero sólo eliminan un 25 % del número total de partículas suspendidas. Pero cuando estos filtros de aspiración se encuentran en condiciones precarias de mantenimiento, los porcentajes disminuyen. Los filtros de aspiración de los compresores convencionales, no detienen partículas pequeñas, aerosoles, vapores ni gases. Por otra parte, el proceso de compresión incrementa la concentración de contaminantes. Partículas sólidas Prácticamente todos los compresores, algunos más que otros, añaden partículas de desgaste y aceite de su propio cuerpo al flujo de aire, esto por su propio funcionamiento y diseño. Las partículas sólidas en los sistemas de aire comprimido, varían en naturaleza desde partículas de polvo y de humos, hasta partículas de herrumbre, de polvo de metal, etc. Tales contaminantes con el paso del tiempo pueden bloquear debido a su tamaño, orificios de herramientas e instrumentos. Compresores. La elección del compresor depende de la presión de trabajo y la cantidad de aire necesaria para el funcionamiento óptimo del sistema. Los compresores se clasifican según su tipo constructivo y la forma en que se genera la energía de presión: • Volumétricos. • Dinámicos. - 32 - Figura 11. Compresor de émbolo de dos etapas. Fuente:.TTCpage.com Los compresores de émbolo …Véase Figura 11…comprimen el aire que entra a través de una válvula de aspiración. A continuación, el aire pasa al sistema a través de una válvula de escape. Los compresores de émbolo son utilizados con frecuencia porque su gama cubre un amplio margen de presiones. Para generar presiones elevadas se recurre a un sistema escalonado de estos compresores. En ese caso, el aire es enfriado entre cada una de las etapas de compresión. Las presiones óptimas para los compresores de émbolo son las siguientes: Hasta 400 kPa (4 bar) una etapa. Hasta 1500 kPa (15 bar) dos etapas. Mas de 1500 kPa (15 bar) tres o más etapas. Los compresores de membrana pertenecen al grupo de compresores de émbolo. En este caso, la cámara de compresión está separada del émbolo mediante una membrana. Esta solución ofrece la ventaja de no dejar pasar el aceite del compresor al aire. Por esta razón, los compresores de membrana suelen utilizarse en la industria de alimentos y en la industria farmacéutica y química. En los compresores helicoidales, dos árboles de perfil helicoidal giran en sentido contrario. El perfil de ambos árboles engrana y así se transporta y comprime el aire. Se conocen como compresores de tornillo. Los compresores de flujo son especialmente apropiados para grandes caudales. Se fabrican en dos tipos: axial y radial. Mediante uno o dos rodetes de turbina se pone en circulación el aire. La energía de movimiento se convierte en energía de presión. Con un compresor axial…Véase Figura 12…la aceleración del aire se realiza mediante los rodetes en el sentido axial de la circulación. - 33 - Figura 12.Turbocompresor axial. Fuente:.TTCpage.com A fin de poder adaptar la cantidad suministrada del compresor a un consumo variable, se requiere una regulación del compresor. Entre los márgenes ajustables para la presión mínima y máxima se regula la cantidad suministrada. Existen diferentes tipos de regulación: • Regulación en vacío • Regulación por purgado • Regulación por cierre • Regulación por pinza • Regulación de carga parcial • Regulación de velocidad • Regulación por aspiración estrangulada • Regulación de todo o nada. Se recomienda una duración de conexión a aproximadamente un 75% para el compresor. Para ello se requiere determinar el consumo promedio y máximo de aire de una instalación neumática y adaptar la elección del compresor al mismo. Si se prevé de antemano que el consumo aumentará por una ampliación de la instalación, entonces la parte de alimentación de aire comprimido debería proyectarse más grande, ya que una ampliación posterior representa siempre unos costes muy elevados. Acumulador. Para estabilizar el aire comprimido se coloca adicionalmente al compresor un acumulador. El acumulador equilibra las oscilaciones de la presión al extraer aire comprimido para el sistema. Si en el acumulador cae la presión por debajo de un determinado valor, entonces el compresor lo llenará hasta alcanzar el valor superior de presión ajustado. Esto tiene la ventaja de que el compresor no tiene que trabajar en funcionamiento continuo. - 34 - La superficie relativamente grande del acumulador provoca un enfriamiento del aire contenido en él. Durante este proceso de enfriamiento se condensa agua que debe ser purgada regularmente a través de un grifo (manual o automático). El tamaño del acumulador depende de los siguientes criterios: • Caudal del compresor • Cantidad de aire requerida en el sistema • Red de tuberías • Regulación del compresor • Oscilación permisible de la presión en el sistema Secadores de aire. La humedad llega a través del aire aspirado por el compresor hacia la red. El porcentaje de humedad depende en primer lugar de la humedad relativa del aire ambiente. La humedad relativa depende de la temperatura y de la situación meteorológica. La humedad absoluta es la cantidad de vapor de agua contenida realmente en 1m3 de aire. La cantidad saturada es la cantidad de vapor de agua que puede absorber en 1m3 de aire con la correspondiente temperatura máxima. Si la humedad relativa del aire es indicada en tanto por cien, es válida la siguiente fórmula: Como la cantidad saturada depende de la temperatura, la humedad relativa cambia según la temperatura, incluso si la humedad absoluta permanece constante. Se denomina punto de condensación a la temperatura a la cual la humedad relativa alcanza el 100%. Si se continúa reduciendo la temperatura, el vapor de agua que contiene comienza a condensarse. Cuanto menor sea la temperatura, tanto más vapor de agua se condensará. El aire comprimido con un contenido demasiado elevado de humedad reduce la vida útil de los sistemas neumáticos. En consecuencia es necesario instalar secadores de aire con el fin de reducir el contenido de humedad del aire. Para secar el aire puede recurrirse a alguno de los siguientes métodos: • Secador por enfriamiento • Secador por adsorción • Secador por absorción El punto de condensación del aire secado deberá estar de 2 a 3 °C por debajo de la temperatura ambiente más fría. Los costos adicionales ocasionados por la instalación de un secador de aire son rápidamente amortizados debido a la disminución de los costos de mantenimiento, por tiempos de inactividad menores y por la mayor fiabilidad del sistema. - 35 - Distribución del aire. Las dimensiones correctas del sistema de tuberías son tan importantes como la elección correcta de los materiales, de la resistencia al caudal del aire, así como la configuración del sistema de tuberías y la ejecución de los trabajos de mantenimiento. Tratándose de instalaciones nuevas, siempre debe tomarse en cuenta una posible ampliación posterior del sistema de aire comprimido. Concretamente, la tubería principal debería tener dimensiones mayores a las que se necesitan para el sistema actual. Con miras a una posterior ampliación, también es recomendable instalar cierres y válvulas de bloqueo adicionales. En todos los conductos se producen pérdidas de presión a raíz de resistencias al flujo, especialmente en zonas de estrechamiento, en ángulos, bifurcaciones y conexiones de tubos. Estas pérdidas tienen que ser compensadas por el compresor. La disminución de presión en todo el sistema debería ser la mínima posible. Para calcular las diferencias de presión es necesario conocer exactamente la longitud de las tuberías. Las conexiones de tubos, las desviaciones y los ángulos deberán ser sustituidos por las longitudes respectivas. Además, la selección del diámetro interior correcto depende también de la presión de servicio y de la cantidad de aire alimentado al sistema. Cualquier tipo de influencia que incida sobre el flujo de aire o cualquier cambio de dirección significan un factor de interferencia que provoca un aumento de la resistencia al flujo. Ello tiene como consecuencia una constante disminución de la presión dentro de las tuberías. Dado que es inevitable utilizar desviaciones, ángulos y conexiones de tubos en cualquier red neumática, es imposible evitar una reducción de la presión.5 Unidad de mantenimiento. Las distintas funciones del acondicionamiento del aire a presión: filtrar, regular y lubricar, pueden llevarse a cabo con elementos individuales. A menudo estas funciones se han unido en una unidad operativa: la unidad de mantenimiento…Véase Figura 13…. Dicha unidad es antepuesta a todas las instalaciones neumáticas. 5 http://es.scribd.com/doc/40944212/El-Aire-Industrial - 36 - Figura 13. Unidad de mantenimiento. Fuente:.TTCpage.com Por lo general la lubricación de aire a presión ya no es necesaria en las instalaciones modernas. Solo deberá aplicarse puntualmente, sobre todo en la sección de potencia de una instalación. El aire comprimido en la sección de mando no deberá lubricarse. El abastecimiento de aire a presión de buena calidad en un sistema neumático depende en gran medida del filtro que se elija. El parámetro característico de los filtros es la amplitud de los poros. Dicho parámetro determina el tamaño mínimo de las partículas que pueden ser retenidas en el filtro. El aire atraviesa el filtro, en el que son separadas las partículas de suciedad restantes que tengan dimensiones superiores a los tamaños de los poros. Los filtros normales tienen poros con dimensiones que oscilan entre 5 y 40 μm. Los filtros tienen que ser sustituidos después de cierto tiempo, ya que las partículas de suciedad pueden obturarlos. En consecuencia se produce una mayor caída de presión en el filtro. Para determinar el momento oportuno para cambiar el filtro, deberá efectuarse un control visual o una medición de la diferencia de presiones. 2.3 CONCEPTOS BÁSICOS DE LA NEUMÁTICA. Neumática. La tecnología de la neumática juega un papel importante en la mecánica desde hace mucho tiempo. Entretanto es incluida cada vez más en el desarrollo de aplicaciones automatizadas.6 Es ese sentido, la neumática es utilizada para la ejecución de las siguientes funciones: 6 http://tesis.uson.mx/digital/tesis/docs/9094/Capitulo8.pdf - 37 - • Detección de estados mediante sensores • Procesamiento de informaciones mediante procesadores • Accionamiento de actuadores mediante elementos de control • Ejecución de trabajos mediante actuadores Para controlar máquinas y equipos suele ser necesario efectuar una concatenación lógica y compleja de estados y conexiones. Ello se logra mediante la actuación conjunta de sensores, procesadores, elementos de accionamiento y actuadores incluidos en un sistema neumático. El progreso experimentado en relación con materiales, métodos de montaje y fabricación ha tenido como consecuencia una mejora de la calidad y diversidad de elementos neumáticos, contribuyendo así a una mayor difusión de la neumática en el sector de la automatización. Aplicaciones generales de la técnica de manipulación: • Sujeción de piezas • Desplazamiento de piezas • Posicionamiento de piezas • Orientación de piezas • Bifurcación del flujo de materiales Aplicaciones generales en diversas técnicas especializadas: • Embalaje • Llenado • Dosificado • Bloqueo • Accionamiento de ejes • Abrir y cerrar puertas • Transporte de materiales • Giro de piezas • Separar piezas • Apilar piezas • Estampar y prensar piezas Figura 14.Sistema neumático para alimentación de piezas. Fuente:.TTCpage.com - 38 - La neumática es aplicada en las siguientes técnicas de fabricación: • Perforar • Tornear • Fresar • Cortar • Acabar • Deformar • Controlar Características y ventajas de la neumática. • Cantidad: En prácticamente cualquier lugar se dispone de cantidades ilimitadas de aire. • Transporte: Es fácil transportar aire a grandes distancias a través de tuberías. • Almacenamiento: Tiene la posibilidad de almacenarse aire comprimido en acumuladores. • Temperatura: El aire comprimido es prácticamente indiferente a oscilaciones de la temperatura. • Seguridad: No alberga riesgos en relación con fuego o explosiones. • Limpieza: El aire comprimido no lubricado no contamina el ambiente. • Composición: Los elementos de trabajo son de composición sencilla y por lo tanto, su precio es relativamente bajo. • Velocidad: El aire comprimido es un medio de trabajo rápido, permite obtener elevadas velocidades y tiempos de conmutación cortos. • Sobrecarga: Las herramientas y los elementos neumáticos pueden funcionar hasta que estén totalmente detenidos. Para evaluar correctamente los campos de aplicación de la neumática, también es necesario conocer sus desventajas: • Acondicionamiento: El aire comprimido tiene que ser acondicionado, ya que de lo contrario puede producirse un desgaste precoz de los elementos por efecto de las partículas de suciedad y agua condensada. • Compresión: El aire comprimido no permite obtener velocidades homogéneas y constantes de los émbolos. • Fuerza: El aire comprimido es económico solamente hasta determinados niveles de presión (6 a 7 bar). • Aire de escape: El escape de aire produce mucho ruido. Sin embargo, este problema puede ser resuelto de modo satisfactorio utilizando materiales que atenúan el ruido y silenciadores. Antes de optar por el uso de sistemas neumáticos, es oportuno efectuar una comparación de la neumática con otras tecnologías diferentes. La evaluación correspondiente deberá referirse al sistema completo. Además deberán tomarse en cuenta los siguientes factores: • Medios de control preferidos • Equipos ya instalados • Conocimientos técnicos disponibles • Sistemas ya instalados - 39 - 2.3.1 Estructura de los sistemas neumáticos. Los sistemas neumáticos están compuestos de una concatenación de diversos grupos de elementos: • Abastecimiento de energía • Elementos de entrada (sensores) • Elementos de procesamiento (procesadores) • Órganos de maniobra y de accionamiento (actuadores) Figura 15. Estructura de un sistema neumático. Fuente:.TTCpage.com Los elementos de un sistema son representados mediante símbolos que, por su diseño, explican la función que asume un elemento en un esquema de distribución…Véase Figura 15… Estos grupos conforman una vía para la transmisión de las señales de mando desde el lado de la emisión de señales hasta la ejecución del trabajo. Fundamentos físicos. El aire es una mezcla de gases y tiene la siguiente composición: • Aproximadamente 78% de Nitrógeno, • Aproximadamente 21% de Oxígeno El aire contiene además, trazas de dióxido de carbono, argón, hidrógeno, neón, helio, criptón y xenón. La presión imperante en la superficie terrestre es denominada presión atmosférica. Esta presión es conocida como presión de referencia. La presión superior a esta presión de referencia se denomina presión manométrica (sobrepresión), mientras que la presión inferior a ella se denomina sub presión o vacío…Véase Figura 16… - 40 - Figura 16. Distribución de la presión del aire. Fuente:.TTCpage.com La presión atmosférica no es constante. Su valor cambia según la ubicación geográfica y las condiciones meteorológicas. La presión absoluta es el valor relacionado a la presión cero. La presión absoluta es la suma de la presión atmosférica más la sobrepresión. En la práctica suelen utilizarse sistemas de medición de la presión que solo indican el valor de la sobrepresión. En neumática es usual relacionar todos los datos sobre el aire al así llamado estado normal. El estado normal del aire según DIN 1343 es un estado determinado por la temperatura normal y la presión normal de un material sólido, líquido o gaseiforme. Estos valores son los siguientes: • Temperatura normal: 273, 15 °K • Presión normal: 101325 Pa Propiedades del aire. En el aire, la falta de cohesión es característica, es decir, la ausencia de una fuerza entre las moléculas en circunstancias usuales en la neumática. El aire, al igual que todos los gases, no tiene una forma definida. Su forma cambia a la más mínima fuerza y, además ocupa el volumen máximo disponible. Ley de Boyle-Mariotte. El aire puede ser comprimido y tiene la tendencia a dilatarse. Esta característica es descrita por la ley de Boyle-Mariotte: A temperatura constante los volúmenes de una misma masa gaseosa son inversamente proporcionales a las presiones a que se halla sometida. El producto de volumen y presión absoluta es constante para una determinada masa de gas. De esta forma se obtiene: (19) Ley de Gay-Lussac. El aire se dilata a presión constante, una temperatura de 273°K y un calentamiento de 1°K, en un 1/273 de su volumen. La ley de Gay-Lussac dice: - 41 - El volumen de una masa gaseosa es proporcional a la temperatura absoluta, mientras que no se modifique la presión. Por lo tanto: (20) La ecuación indicada únicamente es válida cuando las temperaturas se indican en °K. Si durante el calentamiento se mantiene constante el volumen, resulta para el aumento de presión la siguiente fórmula: (21) La siguiente ecuación general de los gases ideales corresponde a todos las leyes expuestas anteriormente: (22) El producto de presión y volumen de una misma masa gaseosa dividido por la temperatura absoluta es constante. 2.4 ACTUADORES NEUMÁTICOS. Actuador. Un actuador transforma la energía del aire comprimido en trabajo. La señal de salida es controlada por el mando y el actuador reacciona a dicha señal por acción de los elementos de maniobra. Los actuadores neumáticos pueden clasificarse en dos grupos según el movimiento, si es lineal o giratorio: • Movimiento rectilíneo. • Cilindros de simple efecto. • Cilindros de doble efecto. • Actuadores de carro • Movimiento giratorio. • Motor neumático. • Actuador giratorio. • Actuador oscilante. Cilindro de simple efecto. Los cilindros de simple efecto…Véase Figura 17… reciben aire a presión solo en un lado. Por lo tanto solo pueden ejecutar el trabajo en un sentido. El retroceso está a cargo de un muelle incluido en el cilindro o se produce por efecto de una fuerza externa. La fuerza del muelle hace retroceder el vástago del cilindro a suficiente velocidad, pero sin que el cilindro pueda soportar una carga. - 42 - Figura 17. Cilindro de simple efecto. Fuente:.TTCpage.com Por su diseño, los cilindros de simple efecto pueden ejecutar diversas funciones de movimientos, tales como: • Entregar • Bifurcar • Juntar • Accionar • Fijar • Expulsar Los cilindros de simple efecto están equipados con una junta simple en el émbolo, en el lado sometido a presión. La estanqueidad de los cilindros de metal o plástico se logra utilizando material flexible (Perburán). Los bordes de la junta se deslizan a lo largo de la camisa del cilindro cuando este ejecuta los movimientos. Los cilindros de simple efecto también pueden ser de membrana o membrana enrollable. La membrana puede ser de goma, de plástico o de metal. El vástago está fijado en el centro de la membrana. Estos cilindros son utilizados para ejecutar trabajos de fijación, prensado o elevación. Cilindros de doble efecto. Figura 18. Cilindro de doble efecto. Fuente:.TTCpage.com Los cilindros de doble efecto…Véase Figura 18… poseen dos conexiones que son utilizadas correspondientemente para la alimentación y la evacuación del aire a presión. - 43 - Ofrecen la ventaja de poder ejecutar trabajos en ambos sentidos. Se trata, por lo tanto, de cilindros sumamente versátiles. La fuerza ejercida sobre el vástago es algo mayor en el movimiento de avance que en el de retroceso porque la superficie en el lado del émbolo es más grande que en el lado del vástago. Si un cilindro tiene la función de mover grandes masas, o altas velocidades, los amortiguadores de final de carrera…Véase Figura 19… se encargan de evitar un golpe seco y, por tanto, un daño de los cilindros. Figura 19. Cilindro de doble efecto con amortiguación de final de carrera. Fuente:.TTCpage.com Otras adaptaciones de cilindros de doble efecto son: • Cilindro tándem • Cilindro con vástago continuo • Cilindro multi posicional • Cilindro de impacto • Cilindro sin vástago • De cinta o de cable • De cinta selladora con camisa ranurada • Con acoplamiento magnético del carro. Actuador giratorio. En esta ejecución de cilindros de doble efecto el vástago dispone de un perfil dentado. El vástago acciona una rueda dentada, por lo tanto de un movimiento lineal resulta un movimiento giratorio. Los márgenes de giro son distintos, desde 45°, 90°, 180°, 270° hasta 360°. El par de giro depende de la presión, la superficie del émbolo y la transmisión, pueden alcanzarse valores hasta 150 Nm. - 44 - 2.5 VÁLVULAS DE VÍAS. Tipos. Las válvulas de vías son dispositivos que influyen en el paso, el bloqueo y la dirección del flujo del aire. El símbolo de las válvulas informa sobre la cantidad de conexiones, la posición de conmutación y sobre el tipo de accionamiento. Sin embargo, los símbolos nada indican sobre la composición de las válvulas, limitándose a mostrar su función. Diseños de válvulas: • Válvulas de asiento (bola o Plato). • Válvulas de corredera En el caso de las válvulas de asiento, los pasos son abiertos o cerrados mediante bolas, platos, discos o conos. Las válvulas de asiento suelen llevar juntas de goma que hacen las veces de asiento. Estas válvulas apenas tienen piezas que puedan desgastarse y, en consecuencia, tienen una vida útil larga. No son sensibles a la suciedad y son muy resistentes. No obstante, requieren de una fuerza de accionamiento relativamente grande, ya que tienen que superar la fuerza del muelle de recuperación y de la presión del aire. En el caso de válvulas de corredera, las conexiones son unidas o cerradas mediante correderas cilíndricas, planas o circulares. Válvulas de 2/2 vías. Las válvulas de 2/2 vías tienen dos conexiones y dos posiciones. En la posición cerrada, estas válvulas no evacuan el aire. El tipo mas frecuente entre las válvulas de 2/2 vías es la válvula de asiento de bola. Estas válvulas pueden ser accionadas manual o neumáticamente. Válvulas de 3/2 vías. Las válvulas de 3/2 vías permiten activar o desactivar señales. Las válvulas de 3/2 vías…Véase Figura 20… tienen tres conexiones y dos posiciones. La tercera conexión 3(R) permite la evacuación del aire del conducto transmisor de la señal. Un muelle presiona una bola contra un asiento de válvula, y el paso de la conexión que recibe presión 1(P) hacia el conducto de trabajo 2(A) queda bloqueado. La conexión 2(A) es evacuada a lo largo del vástago que abre el paso hacia la conexión 3(R). El vástago se encarga de separar la bola de su asiento. Al efectuar esta operación, es necesario superar la fuerza que ejerce el muelle de reposición y, además, la fuerza de presión. Si la válvula está en estado activado, están unidas las conexiones 1(P) y 2(A) y la válvula abre el paso. Estas válvulas son accionadas manual o mecánicamente. La fuerza necesaria para su accionamiento depende de la presión de alimentación y de la fricción en la válvula misma. Estas circunstancias significan una limitación de los posibles tamaños de este tipo de válvulas. El diseño de las válvulas de asiento de bola es sencillo y compacto. - 45 - Figura 20. Válvula de 3/2 vías, cerrada en reposo, asiento de plato. Fuente:.TTCpage.com La válvula de 3/2 vías puede ser accionada neumáticamente mediante una señal neumática que llega a la entrada 12(Z)…Véase Figura 21… Figura 21. Válvula de 3/2 vías, accionada neumáticamente, cerrada en reposo. Fuente:.TTCpage.com Cuando la válvula recibe presión en la conexión 12(Z), la corredera actúa en contra del muelle de reposición. El paso entre 1(P) hacia 2(A) está abierto. Una vez evacuado el aire de 12(Z) el émbolo vuelve a su posición normal por acción del muelle. El plato cierra el paso de 1(P) hacia 2(A). El aire de escape del conducto de trabajo 2(A) puede ser evacuado por 3(R). La válvula neumática de 3/2 vías con muelle de reposición puede ser usada en posición bloqueada o abierta. Las válvulas servo pilotadas requieren de poca fuerza para su activación. Un pequeño taladro une la conexión de aire a presión 1(P) a la válvula servo pilotada. - 46 - Si se actúa sobre el rodillo, la válvula servo pilotada abre. El aire a presión fluye hacia la membrana y desplaza el plato de la válvula hacia abajo. La conmutación se efectúa en dos fases: primero queda bloqueado el paso de 2(A) hacia 3(R) y, a continuación, queda abierto el paso de 1(P) hacia 2(A). En el momento en que el elemento de maniobra ya no actúa sobre el rodillo, la válvula es repuesta a su posición normal. En consecuencia, queda bloqueado el paso del conducto con aire a presión hacia la membrana y se evacua el aire. El muelle coloca el émbolo de mando en su posición normal. Figura 22. Válvula de 3/2 vías con rodillo, servo pilotada, cerrada en reposo. Fuente:.TTCpage.com Este tipo de válvula también puede ser utilizado alternativamente como abierta o cerrada en reposo…Véase Figura 22… Válvula de 5/2 vías. Las válvulas de 5/2 vías…Véase Figura 23… tienen cinco conexiones y dos posiciones. Estas válvulas son utilizadas principalmente como elementos de maniobra para el accionamiento de cilindros. En su calidad de elemento de mando, estas válvulas tienen un émbolo de mando que se encarga de unir o separar los conductos correspondientes efectuando el movimiento porque no es necesario superar la resistencia del aire comprimido o de muelle. En el caso de las válvulas de corredera longitudinal, es posible aplicar todos los tipos de accionamiento, ya sean manuales, mecánicos, eléctricos o neumáticos. En estas válvulas, el recorrido de la operación de accionamiento es considerablemente mayor que en el caso de las válvulas de asiento. Esta versión de válvulas de corredera ofrece problemas de estanqueidad. Otro método de estanqueidad consiste en utilizar una junta de plato suspendido con movimientos de conmutación relativamente pequeños. La junta de asiento une - 47 - la conexión 1(P) con 2(B) o con 4(A). Las juntas secundarias del émbolo unen las conexiones de evacuación de aire con las conexiones de escape. La válvula tiene en ambos lados una unidad de accionamiento manual para controlar el movimiento del émbolo. Figura 23.Válvula de 5/2 vías, válvula de asiento. Fuente:.TTCpage.com Las válvulas neumáticas 5/2 vías tienen capacidad de memoria. La válvula conmuta de la conexión 14(Z) a la conexión 12(Y) por efecto de señales neumáticas alternativas.7 Manipulación neumática Movimiento vertical En el movimiento vertical las situaciones más desfavorables tienen lugar en el arranque del movimiento de ascenso y en la frenada del movimiento de descenso: Figura 24. Diagrama Ventosa Movimiento Vertical. Fuente: Tecnun 7 [11:29:11 p.m.] mao941: http://www.miclase.com.ar/documentos/neumatica-industrial_festo.pdf - 48 - Se puede suponer que la aceleración / deceleración es constante durante el tiempo de arranque / parada. Normalmente su valor se puede estimar considerando que se pasa de 0 m/s a 1 m/s o viceversa en una décima de segundo, por lo que a = 10 m/s2. Movimiento horizontal Las aceleraciones que se producen en movimiento horizontal provocan un esfuerzo cortante entre la ventosa y la esfera que puede hacer que ambas se separen. La fuerza de rozamiento existente entre las superficies tiene que ser suficiente para que esto no ocurra. La aceleración es máxima en el arranque del giro y en la frenada. Figura 25. Diagrama Ventosa Movimiento Horizontal. Fuente: Tecnun Las ventosas más alejadas del centro de giro son las que van a sufrir una mayor aceleración. Suponiendo que el nivel de vacío con el que trabajarán será del 70 %.Se plantean en ambos casos el equilibrio de las fuerzas de la esfera teniendo en cuenta la fuerza de inercia. Comportamiento de una esfera en un plano inclinado Las fuerzas que actúan sobre el cuerpo son: el peso la reacción del plano inclinado La fuerza de rozamiento en el punto de contacto entre la rueda y el plano Descomponemos el peso en una fuerza a lo largo del plano y otra perpendicular al plano inclinado. Las ecuaciones del movimiento son las siguientes: - 49 - Figura 26. Diagrama esfera plano inclinado. Fuente: Autores Figura 27. Diagrama esfera en movimiento plano inclinado. Fuente: Autores Movimiento de traslación del c.m. mg·senθ -Fr=mac (23) Movimiento de rotación alrededor de un eje que pasa por el c.m. FrR=Icθ (24) Relación entre el movimiento de traslación y rotación (rueda sin deslizar) ac=θ Balance de energía Energía cinética en el movimiento de rodar La energía cinética de un cuerpo que rueda es la suma de la energía cinética de traslación del c.m. y la energía cinética de rotación alrededor del c.m. (25) Trabajo de las fuerzas que actúan sobre el cuerpo - 50 - El trabajo total de las fuerzas que actúan sobre el cuerpo que rueda es la suma del trabajo en el movimiento de traslación más el trabajo en el movimiento de rotación W=Wt+Wr (26) Figura 28. Diagrama total de fuerzas que actúan sobre la esfera. Fuente: Autores El trabajo en el movimiento de traslación es Wt=(mgsenθ -Fr)x=mgh-Frx (27) El trabajo en el movimiento de rotación es Wr=Mθ =FrRθ =Frx (28) El trabajo total es W=mgh (29) El trabajo de la resultante de las fuerzas que actúan sobre un cuerpo modifica su energía cinética (de traslación del c.m. y de rotación alrededor de un eje que pasa por el c.m.) (30) La velocidad final vc del c. m. del cuerpo al llegar al final del plano inclinado es la misma que hemos calculado a partir de la dinámica. (31) El cuadrado de la velocidad del c.m. vc es proporcional a la altura inicial h. - 51 - 3. METODOLOGÍA 3.1 ENFOQUE DE LA INVESTIGACIÓN Con los recursos electrónicos y sistemáticos que existen en la actualidad se puede resolver la situación que plantea el proyecto En primer lugar se ha hecho un estudio de los factores por los cuales un cliente prefiere un producto y que productos son los más solicitados para ser mostrados … Véase Tabla 1…se realiza una lista de los elementosque formaran parte delsistema de demostración tipo display, para el desarrollo del proyecto, a continuación se definirála disposición de los diferentes sistemas (manipulación, bandas y visión ), cuando este estudio esté listo y evaluado por los organismos correspondientes se consultara con proveedores y se adquirirán, sensores, PLC, bandas, electro válvulas, pistones y demás equipos que aún no han sido definidos, para poder realizar el programa de control se asistirá a capacitaciones de programación con software xingetplcmotionpara así programar correctamente el PLC. Cuando todo el proceso anterior se realice con éxito se cargaran los programas en los respectivos equipos y se pondrá en marcha el proyecto. 3.2 LÍNEA DE INVESTIGACIÓN El proyecto está enfocado en el campo de la automatización, el cual está comprendido en el campo de la investigación de automatización de procesos y pertenece a la facultad de ingeniería bajo la sublínea de investigación de tecnologías actuales, a su vez es uno de los principales objetivos de la mecatrónica, el sistema de demostración tipo display comprende procesos de control es decir el proceso lógico que debe seguir la máquina para que todos los elementos funcionen de forma eficiente y cumplan la secuencia demostrativa de los productos. 3.3 HIPÓTESIS La mecatrónica proporciona los recursos suficientes para resolver el problema que en este proyecto se plantea, mostrar mediante un sistemade demostración tipo display los productos de la empresa P&R Neumática Ltda. Parade esta forma incrementar el uso de los productos de la empresa en la industria y fomentar el uso de máquinas automatizadas. - 52 - 4. DESARROLLO INGENIERIL 4.1 DESCRIPCIÓN DEL PROCESO El proceso diseño y construcción del sistema de demostración tipo displayestá compuesto por: 4.1.1 Componentes. Los componentes a utilizar de la empresa P&R Neumática Ltda. Son mostrados a continuación … Véase Tabla 7 … que especifica los elementos que se usaran en la construcción de la máquina de demostración tipo Display con sus respectivas marcas, referencias, descripciones y cantidades, las fichas técnicas de estos materiales se encuentran en los anexos 1 a 10, todos los materiales son entregados por parte P&R Neumática Ltda., representantes directos de las mismas. Tabla 7 Descripción detallada de los elementos a usar. MARCA REFERENCIA DESCRIPCIÓN CANTIDA D ANEX O 1 MAC 411A-BOA-DM-DDAA1KA ELEC/VALV 5/2 REG/RES 1/4 NPT 24V DC PLUG 1 1 2 MAC 421A-BOA-DM-DDAJ1KA ELEC/VALV 5/2 DOBLE SOLEND 1/4 NPT 24V DC PLUG 2 1 3 TPC PC3-N02G UNIDAD MANTEN 1/4" ESTANDAR MANUAL CON MANOM. 1 2 4 TPC SID-16-01 CILINDRO GRAFADO DIAM. 16MM X REC. 1" /25MM 1 2 5 TPC SID-16-02 CILINDRO GRAFADO DIAM. 16MM X REC. 1" /35MM 1 2 6 TPC SID-16-03 CILINDRO GRAFADO DIAM. 16MM X REC. 1" /45MM 1 2 7 TPC SID-16-04 CILINDRO GRAFADO DIAM. 16MM X REC. 1" /55MM 1 2 8 TPC SID-16-05 CILINDRO GRAFADO DIAM. 16MM X REC. 1" /65MM 1 2 9 ALPHA DA-63 ACTUADOR ROTATIVO 63MM D.E.GIRO 90 TORQUE 43. 1 7 1 0 TPC KLI 25-900 CILINDRO CON CARRO INTERNAMENTE GUIADO 1 4 1 1 AR K-3B EYECTOR VACIO ESTANDAR MODELO K-3B 1 8 1 2 AR VC47NIT VENTOSA COPA 47 MM NBR CON RACOR MACHO 1/4" 1 8 1 3 TPC ST0604-BU MANGUERA POLIURETANO 6MM OD X 4MM ID AZUL 50 5 - 53 - 1 4 TPC PC06-02 RACOR RECTO 1/4 NPT X 6 MM OD 25 6 1 5 TPC PL06-02 RACOR CODO 1/4 NPT X 6 MM OD 25 6 1 6 TPC PUT06 UNION TEE 6 MM OD 10 6 1 7 XINGET XC3 14E/10S PLC 10 INS 8 OUTS 1 10 1 8 BANNE R IVU SERIES CÁMARA DE VISIÓN ARTIFICIAL 1 9 1 9 TPC JEL-03 REED SWITCH TIPO RCI PARA CILINDRO GRAFADO 5 3 Fuente: Autores 4.2 DISEÑO DE LA BANDA TRANSPORTADORA El sistema de demostración está ideado como una forma de mostrar componentes que son usados en la industria como los son las bandas transportadoras, para este caso se calcularan dos una banda para transportar un material típico en la industria agrícola como lo puede ser el trigo y las bandas del dispositivo tipo Display. 4.2.1 Diseño banda transportadora para una materia prima (trigo) La alimentación al sistema por medio de la banda transportadora es dependiente de la del volumen de las esferas didácticas. Las dimensiones de estas son r = 50 mm De = densidad de la materia (trigo) Va = velocidad de avance ⁄ (32) ⁄ (33) 4.2.2 Selección del ancho de banda y velocidad. El ancho de banda depende del tamaño del material, para el caso en estudio nos regimos por el material suministrado a la banda transportadora trigo Con respecto - 54 - a esto, se selecciona un ancho de banda de 750 mm, ya que el tamaño del material, es uniforme y el tamaño unitario es menor a 650 mm. El paso a seguir es la elección de la velocidad de la banda, la cual se encuentra sujeta a la velocidad de avance de los rodillos alimentadores; la velocidad de avance para la el trigo es de 5 m/s. La banda necesita de unas guías de carga, para no permitir que el trigo se desborde de la banda; las guías de carga deben tener una separación recomendada de: (34) Teniendo el ancho de banda útil (B1), y la altura del cumulo del trigo , entonces (35) 4.2.3 Selección de rodillos. La longitud de los rodillos se encuentra estandarizada para el ancho de banda, y para un ancho de banda de 750 mm, la longitud de los rodillos es superior a la de la banda 900 mm. Para la selección de rodillos lo primero que hay que tener en cuenta es el diámetro del mismo en función de la capacidad de carga, que recomienda unos diámetros de rodillos que van desde 12mm hasta 16 mm, para un ancho de banda de 750 mm Analizando que la banda estando totalmente cargada tiene un peso de aproximadamente 50 kg, seleccionamos el diámetro de eje 80 mm; para el cual la capacidad de carga se encuentra entre 10 kg y 12 kg; el diámetro del rodillo es de 25 mm. para saber la distancia mínima entre rodillos portantes, que para el ancho de banda de 750 mm, se obtiene un valor de 400 mm para los superiores, y para los inferiores de 700 mm. La banda transportadora tiene una longitud de 750 mm, esto quiere decir que se deben colocar tres rodillos superiores y uno inferior. - 55 - Después de seleccionar las características de trabajo apropiadas para el rodillo, se procede a ubicar en el catalogo las dimensiones y características físicas de los rodillos a usar. Peso del rodillo = 6.4 Kg Peso de las partes móviles = 188 Kg 4.2.4 Cálculos de reacciones en las bandas ∑MA = 0 By(15) = 200000gr(1) By= 13333.33gr (36) Ay (15) = 200000gr (16) Ay= 213333.3gr (37) Ay = Bx (38) ∑MB = 0 ∑Fx = 0 ∑Fy = 0 Ay = 200000gr + By 213333.3gr = 200000gr + 13333.33gr 213333.33gr = 213333.3gr (39) Tg(α) = 70cm 150cm α = arctg( 70/150) α = 25,02° Sen(β) = 10cm/70cm β = arcsen (10/70) β = 8,21° ∑Fx = 0 F10x = 200000gr x Cos(α) F10x = 181232.04gr (40) ∑Fy = 0 F10y = 200000gr + 200000gr x Sen(α) F10y = 284586.91gr (41) ∑Fx = 0 F11x = 200000gr x Cos(α) + 200000gr x Sen(β) F11x = 209792.37gr (42) ∑Fy = 0 F11y + 200000gr x Sen(α) = 200000gr x Cos(β) F11y = 113363.34gr (43) Tg(θ) = 70 100 θ = arctg = (70/100) θ = 34,99° ∑Fx = 0 - 56 - F9 x Cos (θ) = F10x (44) F9 = F10 /Cos (θ) F9 = 221216.43gr (Compresión) ∑Fy = 0 F8 + F9 x Sen(θ) = F10y (45) F8 = F10y – F9 x Sen(θ) F8 = 157734gr (Compresión) ∑Fx = 0 ∑Fy = 0 F6 = 0 (Nula) F2 = F8 (46) F2 = 157734gr (Compresión) ∑Fy = 0 F9 x Sen(θ) = F3 x Sen(θ) (47) F9 = F3 F3 = 221216.43gr ( Compresión ) ∑Fx = 0 F7 + F6 = F9 x Cos(θ) + F3 x Cos(θ) F7 = F9 x Cos(θ) + F3 x Cos(θ) – F6 F7 = 362454.63gr (Compresión) (48) α = arctg (70/150) (49) α = 25,02° ∑Fx = 0 F4 x Cos(α) + E11x = F7 (50) F4 = F7 – E11xCos(α) F4 = 168473.45gr ( Tensión ) ∑Fy = 0 F5 = E11y + F4 x Sen(α) (51) F5 = 184613.56gr (Compresión) ∑Fx = 0 Bx = 200000gr x Sen(β) (52) Bx = 28560.33gr Ax = 28560.33 Comprobación ∑ Fy = 0 200000gr x Cos(β) = F5 + By (53) 200000gr x Cos(8,21) = 184613.56gr + 13333.33gr 197952.33gr = 197952.33gr Para efectos de la construcción del Display de la banda, se realizaron los siguientes cálculos de reacciones por leyes de similitud y se redujeron las dimensiones en una escala de 10 - 57 - 4.3 DISEÑO DE LA BANDA TRANSPORTADORA PARA EL SISTEMA TIPO DISPLAY. La alimentación al sistema por medio de la banda transportadora es dependiente de la del volumen de las esferas didácticas. Las dimensiones de estas son r = 50 mm De = densidad de las esferas Va = velocidad de avance ⁄ (54) (55) (56) ⁄ (57) 4.3.1 Selección del ancho de banda y velocidad. El ancho de banda depende del tamaño del material, para el caso en estudio nos regimos por el material suministrado a la banda transportadora (esferas didácticas). Con respecto a esto, se selecciona un ancho de banda de 75 mm, ya que el tamaño del material, es uniforme y el tamaño unitario es menor a 50 mm. El paso a seguir es la elección de la velocidad de la banda, la cual se encuentra sujeta a la velocidad de avance de los rodillos alimentadores; la velocidad de avance para la las esferas didácticas es de 0,5 m/s. La banda necesita de unas guías de carga, para no permitir que las esferas didácticas se desborde de la banda; las guías de carga deben tener una separación recomendada de: (58) Teniendo el ancho de banda útil (B1), y la altura de las esferas que es el mismo radio, entonces (59) - 58 - (60) 4.3.2 Cálculos de reacciones en las bandas en el sistema tipo Display ∑MA = 0 By(15) = 200gr(1) By= 13,33gr (61) ∑MB = 0 Ay (15) = 200gr (16) Ay= 213,33gr (62) Ay = Bx (63) ∑Fx = 0 ∑Fy = 0 Ay = 200gr + By (64) 213,33gr = 200gr + 13.33gr 213,33gr = 213,33gr (65) Tg(α) = 7cm 15cm α = arctg( 7/15) α = 25,02° Sen(β) = 1cm/7cm β = arcsen (1/7) β = 8,21° ∑Fx = 0 F10x = 200gr x Cos(α) (66) F10x = 181,23gr ∑Fy = 0 F10y = 200gr + 200gr x Sen(α) F10y = 284,59gr (67) ∑Fx = 0 E11x = 200gr x Cos(α) + 200gr x Sen(β) E11x = 209,79gr (68) ∑Fy = 0 E11y + 200gr x Sen(α) = 200gr x Cos(β) E11y = 113,36gr (69) Tg(θ) = 7 10 θ = arctg = (7/10) θ = 34,99° ∑Fx = 0 F9 x Cos (θ) = F10x (70) F9 = F10 x Cos (θ) F9 = 221,21gr (Compresión) ∑Fy = 0 F8 + F9 x Sen(θ) = F10y (71) - 59 - F8 = F10y – F9 x Sen(θ) (72) F8 = 157,74gr (Compresión) ∑Fx = 0 ∑Fy = 0 F6 = 0 (Nula) F2 = F8 (73) F2 = 157,74gr (Compresión) ∑Fy = 0 F9 x Sen(θ) = F3 x Sen(θ) (74) F9 = F3 F3 = 221,21gr ( Compresión ) ∑Fx = 0 F7 + F6 = F9 x Cos(θ) + F3 x Cos(θ) F7 = F9 x Cos(θ) + F3 x Cos(θ) – F6 F7 = 362,45gr (Compresión) (75) α = arctg (7/15) α = 25,02° ∑Fx = 0 F4 x Cos(α) + E11x = F7 (76) F4 = F7 – E11xCos(α) F4 = 168,47gr ( Tensión ) ∑Fy = 0 F5 = E11y + F4 x Sen(α) (77) F5 = 184,61gr (Compresión) ∑Fx = 0 Bx = 200gr x Sen(β) (78) Bx = 28,56gr Ax = 28,56 Comprobación ∑ Fy = 0 200gr x Cos(β) = F5 + By (79) 200gr x Cos(8,21) = 184,61gr + 13,33gr 197,95gr = 197,95gr 4.3.3 Selección de rodillos tipo display. La longitud de los rodillos se encuentra estandarizada para el ancho de banda, y para un ancho de banda de 75 mm, la longitud de los rodillos es superior a la de la banda 90 mm. Para la selección de rodillos lo primero que hay que tener en cuenta es el diámetro del mismo en función de la capacidad de carga, que recomienda unos diámetros de rodillos que van desde 12mm hasta 16 mm, para un ancho de banda de 75 mm Analizando que la banda estando totalmente cargada tiene un peso de aproximadamente 5 kg, seleccionamos el diámetro de eje 8 mm; para el cual la capacidad de carga se encuentra entre 10 kg y 12 kg; el diámetro del rodillo es de 25 mm. - 60 - Para saber la distancia mínima entre rodillos portantes, que para el ancho de banda de 75 mm, se obtiene un valor de 400 mm para los superiores, y para los inferiores de 700 mm. La banda transportadora tiene una longitud de 750 mm, esto quiere decir que se deben colocar tres rodillos superiores y uno inferior. Después de seleccionar las características de trabajo apropiadas para el rodillo, se procede a ubicar en el catalogo las dimensiones y características físicas de los rodillos a usar. Peso del rodillo = 0,64 Kg Peso de las partes móviles = 0,188 Kg 4.4 RODAMIENTO DE LA ESFERA EN UN PLANO INCLINADO. Al inicio del proceso después que las esferas fueron al azar seleccionadas por el brazo de sujeción, estas son ubicadas en la parte superior de la banda numero A … Véase Figura 35… para establecer si están buenas o no ( control de calidad ), tenemos un plano inclinado donde las esferas rodaran y serán seleccionadas para seguir el camino adecuado. m = 200 gr θ = 35° como se conoce el ángulo de inclinación θ y el momento de inercia Ic del cuerpo que rueda, calculamos ac y el valor de la fuerza de rozamiento Fr… Momento de inercia de la esfera Expresamos el momento de inercia Ic=k·mR2 donde k es un factor geométrico 2/5 para la esfera. ⁄ ⁄ ⁄ (80) Ahora vamos a calcular la velocidad del cuerpo después de haber recorrido una longitud (x) a lo largo del plano inclinado, partiendo del reposo, empleamos las ecuaciones del movimiento rectilíneo uniformemente acelerado ( ⁄ ) - 61 - (81) La velocidad final vc del c. m. del cuerpo al llegar al final del plano inclinado es Siendo h la altura de partida del cuerpo referida a la posición final, h=x·sen √ √ (82) (83) ⁄ ⁄ (84) ⁄ (85) Como vemos la fuerza de rozamiento en el movimiento de rodar produce dos trabajos de la misma magnitud pero de signos opuestos. Esta es la razón por la que no tenemos que incluir el trabajo de la fuerza de rozamiento en el balance de energía. 4.5 SELECCIÓN DE LOS ACTUADORES NEUMÁTICOS 4.5.1 Cálculo de la ventosa Para calcular la fuerza de aspiración que tiene que proporcionar la ventosa se tienen que considerar tanto los movimientos verticales como los movimientos horizontales que se realizan sujetando la esfera. Se considerará un factor de seguridad de 1.5 Movimiento Vertical (86) Movimiento Horizontal - 62 - (87) Es más restrictivo el caso del movimiento Horizontal. Se selecciona la ventosa de la Tabla… Véase Tabla 8… buscando una cuya fuerza de aspiración sea capaz de realizar la acción con un nivel de vacío del 70=% Tabla 8Descripción detallada ventosa a usar. Fuente: Tecnun La ventosa más pequeña que con un nivel de vacío del 70% es capaz de producir una fuerza de aspiración mayor que 21,47 N es la de diámetro 30 mm. Se eligen las ventosas de diámetro 30 mm que tienen un peso de 13 g cada una. La ventosa más pequeña que con un nivel de vacío del 70% es capaz de producir una fuerza de aspiración mayor que 21,47 N es la de diámetro 30 mm.Se eligen las ventosas de diámetro 30 mm que tienen un peso de 13 g cada una. - 63 - 4.5.2Selección del generador de vacío Se busca un generador de vacío capaz de producir un nivel del 70% de vacío, se desea que el generador trabaje con la menor presión posible para minimizar así el caudal de aire que consume para generar el vacío. Para este caso el volumen de aire que se debe aspirar es pequeño, es el volumen encerrado entre la ventosa y la esfera , como es un volumen reducido se ha optado por elegir el generador AR VACUUM serie K …Véase Anexo 8…. 4.5.3Selección del actuador rotativo La selección de los actuadores de giro viene fundamentalmente condicionada por la energía cinética que existe en el movimiento de giro y que el actuador tiene que ser capaz de absorber: (88) Ec: Energía cinética en J. I: Momento de inercia en kg m2 ω: Velocidad angular en rad/s (89) Según el Teorema de Steiner (90) Siendo r la distancia del centroidede la esfera al eje de giro El momento de inercia de las ventosas se puede considerar como el momento de una masa puntual situada en su centro de gravedad. En la gráfica…Véase Figura 29… se muestra la ventosa respecto al centro de giro y las dimensiones del soporte del brazo. - 64 - Figura 29. Diagrama Distancia ventosa respecto al eje de giro del brazo. Fuente: Autores Aplicando el teorema de Steiner para la esfera: (91) (92) El momento de inercia de las ventosas se va a considerar como el momento de una masa puntual en su centro de gravedad. (93) (94) El momento de inercia total que soporta el actuador de giro es de: (95) El tiempo empleado en el giro de 90º se supone que es de medio segundo. Con lo cual ya tenemos todos los datos para entrar en las curvas de selección del tamaño del actuador de giro. - 65 - Figura 30. Curva de momento de inercia vs tiempo. Fuente: Tecnun Se opta por utilizar el actuador rotativo ALPHA ACTUATORS serie DA modelo c83da …Véase Anexo 7….ya que sus especificaciones se adaptan a las necesidades requeridas. 4.5.4 Diseño del receptáculo Teniendo en cuenta las dimensiones del dispositivo se decide utilizar un receptáculo cuadrado…Véase Figura 31… con una inclinación de un grado para conseguir que las esferas siempre estén posicionadas en el lugar preciso para ser tomadas por la ventosa - 66 - Figura 31. Diagrama receptáculo diseñado. Fuente: Autores Figura 32.Rreceptáculo diseñado. Fuente: Autores 4.5.5 Diseño guía de las bandas Para diseñar la guía que encamina las esferas de una banda a otra en un Angulo de 90 grados se pensó en la forma …Véase Figura 32… capaz de hacer que la esfera cambie su trayectoria de una banda a otra al rodar sobre el borde curvo de la guía. - 67 - Figura 33. Diagrama guía de la banda. Fuente: Autores Las dimensiones corresponden al ancho de la banda transportadora del dispositivo tipo Display 4.5.6 Montaje completo de la maquina tipo Display Seleccionados todos los elementos se procede a su montaje final Figura 34. Maquina Tipo Display. Fuente: Autores Software Solid Edge ST Licencia de prueba 30 dias - 68 - En la figura 35 se aprecia el montaje completo de los elementos para la maquina tipo Display donde mediante el uso de esferas didácticas se simula los diferentes productos que pueden ser usados en la industria y como estos pueden ser manipulados mediante ventosas, transportados mediante bandas transportadoras y seleccionados mediante visión, con la cámara simulando así el control de calidad. Figura 35. Vista Superior Maquina Tipo Display. Receptáculo A P1 P2 Fuente: Autores Software Solid Edge ST Licencia de prueba 30 dias Desde la vista superior podemos apreciar la ruta que seguirán las esferas dependiendo de la selección realizada por la cámara, donde las esferas inician en el receptáculo y son elevadas por el brazo acoplado al actuador rotativo quien las lleva al punto A donde se acumulan hasta haber 5 y el pistón 1 las libera para que dependiendo del tipo de esfera estas sigan la ruta descrita por las flechas Azules si las esferas son buenas, o sean expulsadas por el pistón 2 y sigan la ruta de las flechas rojas si estas son malas, bajando por el deslizadero y pasando por las bandas para regresar de nuevo al receptáculo donde el ciclo inicia nuevamente. - 69 - Figura 36. Maquina Tipo Display. Fuente: Autores Software Solid Edge ST Licencia de prueba 30 dias - 70 - 4.5.7Piezas de la maquina tipo Display Figura 37. PiezasMaquina Tipo Display. 2 1 7 3 5 4 11 10 6 8 9 12 13 Fuente: AutoresSoftware Solid Edge ST Licencia de prueba 30 dias En la gráfica 35 se enumeran las piezas usadas en la maquina así como la cantidad de las mismas 1) 2) 3) 4) 5) 6) 7) 8) 9) Actuador rotativo Brazo Ventosa Receptáculo Soporte Pistones Piston Selección Piston Retenedor Deslizadora Motor x2 - 71 - 10) Banda Transportadora x5 11) Guia de la banda 12) Soporte del motor x4 13) Soporte Bandas x14 Los planos de las piezas anteriormente mencionadas se encuentran en el anexo 12 4.5.8 Sistema de alimentación maquina tipo display. Para la alimentación eléctrica de la maquina tipo display, se utilizara el sistema de alimentación provisto por P&R Neumática Ltda., en sus instalaciones contando con una fuente a 24 v dc a 3 amp, voltaje el cual funcionan los elementos suministrados por parte de ellos. Para la selección de la parte eléctrica de las válvulas nos remitimos a la ficha técnica de la serie 400 de Mac VALVES en donde encontramos que tienen una variedad de voltaje para su funcionamiento, …ver anexo 1…, entre estos encontramos V= 24 V DC que se adapta muy bien a las especificaciones que tenemos en la fuente de alimentación de P&R Neumática Ltda., así mismo la alimentación, las entradas y salidas del PLC son 24 V dc y los sensores son multi voltaje en un rango de 10 v dc a 30 v dc para que todo quede compatible, para evitar hacer acoples en diferentes voltajes, que pueden generar sobre costos y se evita sobre cargas eléctricas ya que todo funciona en el mismo rango de voltaje. Para la alimentación neumática se hará uso de la red neumática existen en P&R que provee un flujo constante de aire a 1.5 CFM´s con una presión máxima de 150 PSI, satisfaciendo las necesidad de aire comprimido, como se muestra en la figura 36 - 72 - Figura 38.Diagrama neumático. Fuente: AutoresSoftware Fluid Sim de Festo Licencia Trial 15 dias Figura 39.Instalaciones neumáticas A P&R Neumática Fuente: Autores - 73 - Figura 40.Instalaciones neumáticas B P&R Neumática Ltda... Fuente: Autores - 74 - 5. PROGRAMA DEL PLC Como se planteó en las limitaciones del proyecto, una de las condiciones impuestas por P&R Neumática Ltda es que se debe programar en xingetplcmotion. …Véase numeral 1.5.2… 5.1 Estrategia de programación. 1. 2. 3. 4. 5. Posicionar el actuador rotativo. Detectar la presencia de una esfera. Activar la ventosa. Posicionar la esfera en la parte superior del sistema. .Seleccionar si la esfera didáctica es buena o defectuosa mediante la cámara 6. Activar el pistón que encaminara a las esferas dependiendo de su estado. - 75 - 5.2 DIAGRAMA DE FLUJO. Inicio ActIzq ActDer PBAR PBA Vent M1 M2 Pis1 Pis2 = = = = = = = = = 1 0 0 0 0 1 1 1 0 SI 1 ActIzq ActDer = = 0 1 NO SI S1 =1 PBA = NO S0 =1 Y S5=1 1 SI Vent Pis1 NO = = 1 0 S6 =1 Y S2=1 SI NO S7 =1 PBAR PBA Vent = = = 0 1 1 Pis2 SI = NO S5 =1 Y S1=1 Inicio 1 Fuente: Autores - 76 - 1 Entradas: S0 S1 S2 S3 S4 S5 S6 S7 Start Stop S8 Brazo a la Derecha Brazo a la Izuierda Ventosa Piston 1 Piston 2 Piston Brazo Arriba Piston Brazo Abajo Camara Inicia Detiene Sensor 5 Esferas Salidas: ActDer ActIzq PBAR PBA Vent Pis1 Pis2 M1 M2 Actuador Rotativo Derecha Actuador Rotativo Izquierda Piston Brazo Arriba Piston Brazo Abajo Ventosa Piston 1 Piston 2 Motor 1 Motor 2 5.3 PROGRAMA EN LISTADO DE INSTRUCCIONES. …Véase Anexo 11… 5.4 Código PLC El siguiente código es el implementado en el PLC para la secuencia del dispositivo tipo Display, consta de un programa principal y 4 subprogramas encargados del movimiento del brazo, el conteo y selección de las esferas , su posterior selección y finalización de la secuencia respectivamente. AllocationList O0.0 O0.1 O0.2 O0.3 O0.4 O0.5 ActDer ActIzq PBAR PBA Vent Pis1 Actuador Rotativo Derecha Actuador Rotativo Izquierda Piston Brazo Arriba Piston Brazo Abajo Ventosa Piston 1 - 77 - O0.6 O0.7 O0.8 I0.0 I0.1 I0.2 I0.3 I0.4 I0.5 I0.6 I0.7 I0.8 I0.9 I1.0 P1 P2 P3 P4 R0 T0 T1 Pis2 M1 M2 S0 S1 S2 S3 S4 S5 S6 S7 Start Stop S8 Piston 2 Motor 1 Motor 2 Brazo a la Derecha Brazo a la Izquierda Ventosa Piston 1 Piston 2 Piston Brazo Arriba Piston Brazo Abajo Camara Sensor 5 Esferas Programa Principal STEP 0 THEN SET SET SET SET RESET LOAD TO ActIzq M1 M2 Pis1 Pis2 V0 R0 STEP 1 IF THEN SET IF THEN IF THEN IF THEN IF THEN S1 PBA SET SET SET Start P1 P2 P3 INC S8 R0 N SET JMP TO 1 S8 NOP 'Actuador Rotativo Izquierda 'Motor 1 'Motor 2 'Piston 1 'Piston 2 'Brazo a la Izquierda 'Piston Brazo Abajo 'Sensor 5 Esferas 'Sensor 5 Esferas Stop P4 - 78 - Programa Brazo STEP 0 THEN SET ActIzq STEP 1 IF THEN SET STEP 2 IF THEN AND SET SET WITH STEP 3 IF THEN RESET SET N STEP 4 IF AND S1 THEN RESETActIzq SET IF THEN N JMP TO 1 STEP 5 IF AND THEN S1 PBA 'Brazo a la Izquierda 'Piston Brazo Abajo S6 S2 Vent T1 0.5s 'Piston Brazo Abajo 'Ventosa 'Ventosa T1 PBA PBAR 'Piston Brazo Abajo 'Piston Brazo Arriba S5 'Piston Brazo Arriba 'Brazo a la Izquierda 'Actuador Rotativo Izquierda ActDer 'Actuador Rotativo Derecha Vent S0 S5 STEP 6 IF THEN RESET JMP TO 0 'Actuador Rotativo Izquierda 'Ventosa 'Brazo a la Derecha 'Piston Brazo Arriba NOP Vent Vent 'Ventosa 'Ventosa Programa conteo y selección STEP 0 IF = AND THEN RESET SET WITH LOAD TO OTHRW JMP TO 0 STEP 1 R0 V5 S3 Pis1 T0 2.5s V0 R0 'Piston 1 'Piston 1 - 79 - IF THEN N SET JMP TO 0 T0 Pis1 'Piston 1 S7 Pis2 'Camara 'Piston 2 S4 Pis2 'Piston 2 'Piston 2 ProgramaSelección STEP 0 IF THEN SET STEP 1 IF THEN RESET JMP TO 0 Programa Stop STEP 0 THEN RESET RESET RESET RESET JMP TO P0 P1 P2 P3 - 80 - 6. CONCLUSIONES Después de los estudios realizados, acerca de los factores que inciden en el momento de tomar la decisión, de adquirir un producto de una determinada marca, se encontró que los clientes de P&R Neumática Ltda. decidían comprar determinadas marcas gracias a que se podía ver su funcionamiento en un dispositivo de demostración, siendo este el factor fundamental, luego de implementar la maquina en P&R Neumática Ltda. el número de interesados en sus productos se incrementó considerablemente. Luego de la implementacion de la maquina. se evidencia el incremento de preferencia en los productos de P&R Neumática Ltda., que se ve reflejado en los informes mensuales de ventas …Vease anexo 13… Durante la contruccion de la maquina se utilizaron actuadores neumaticos de diametro 16 mm, 20 mm 25 mm 32 mm y 40 mm, en donde se evidencio que el menor diametro cumplia con las necesidades requeridas y tenia un menor consumo de aire comprimido. Inicialmente para a la manipulacion de las esferas, se utilizaron cilindros de agarre (Grippers), que dependiendo de la presion de entrada; dañaban las esferas, por eso se opto en utilizar sistemas de vacio con ventosas que sin importar la presion que tuviera, satisfacia las necesidades de la sujecion de las mismas. - 81 - 7. BIBLIOGRAFÍA LOPEZ, Agustín. Cintas transportadoras. Madrid: DOSSAT, 2002. MARKS. Manual del ingeniero mecánico. México: McGraw Hill, 1999. SHIGLEY, Joseph; y MISCHKE, Charles. Diseño en ingeniería mecánica. México: McGraw Hill, 2002. POSSE Edwin, Diseño y Simulación de una Maquina Ensiladora Tesis 2006 Mac VALVES serie 400 Descripción http://www.macvalves.com/support/catalogs_files/NT.pdf[en línea] [Consulta: 12 de Mayo de 2011] TPC MECHATRONICS serie PC Descripción http://www.tpcpage.com/products/products.asp[en línea] [Consulta: 12 de Mayo de 2011] ALPHA ACTUATORS serie DA Descripción http://www.tpcpage.com/products/products_view.asp?pno=264&Bigno=3&Midno=8 2[en línea] [Consulta: 14 de Mayo de 2011] AR VACUUM serie K Descripción http://www.ar-vacuum.com/informacion_tecnica.php?ids=4&idc=1[en [Consulta: 12 de Mayo de 2011] línea] PLC SERIE XC3 14E/10S Descripción http://www.ab.com/programmablecontrol/plc/micrologix/index.htmlb[en [Consulta: 16 de Mayo de 2011] línea] Software Solid Edge ST bajo licencia de prueba por 30 dias. Base de datos empresa P&R Neumática Ltda. - 82 - ANEXOS Anexo 1. Ficha técnica Mac VALVES serie 400 Fuente: http://www.macvalves.com/support/catalogs_files/NT.pdf - 83 - Anexo 2. Ficha técnica TPC MECHATRONICS serie PC Fuente:http://www.tpcpage.com/products/products.asp - 84 - Anexo 3. Ficha técnica TPC MECHATRONICS serie AX Fuente: http://www.tpcpage.com/products/products_view.asp?pno=204&Bigno=1&Midno=12 - 85 - Anexo 4. Ficha técnica TPC MECHATRONICS serie KLI Fuente: http://www.tpcpage.com/products/products_list.asp?Bigno=1&Midno=77&Midct=Jig%20Cylinder - 86 - Anexo 5. Ficha técnica TPC MECHATRONICS serie TUB Fuente: http://www.tpcpage.com/products/pro04.asp?Bigno=1&Midno=84&Midct=Tubing - 87 - Anexo 6. Ficha técnica TPC MECHATRONICS serie CF Fuente: http://www.tpcpage.com/products/products_view.asp?pno=264&Bigno=3&Midno=82 - 88 - Anexo 7. Ficha técnica ALPHA ACTUATORS serie DA Fuente: http://www.valve-controls.com/Soft_Show.asp?SoftID=15 - 89 - Anexo 8. Ficha técnica AR VACUUM serie K Fuente:http://www.ar-vacuum.com/informacion_tecnica.php?ids=4&idc=1 - 90 - Anexo 9. Ficha técnica cámara de visión artificial Fuente:http://www.bannerengineering.com/en-US/products/sub/540 - 91 - Anexo 10. Ficha técnica del PLC Fuente:http://www.electricasbogota.com/detalles/-plc/1630-68054 - 92 - Anexo 11-A. Programa en listado de instrucciones Fuente: Autores - 93 - Anexo 11-B. Programa en listado de instrucciones - 94 - Anexo 11-C. Programa en listado de instrucciones Fuente: Autores - 95 - Anexo 11-D. Programa en listado de instrucciones - 96 - Anexo 12.Motor Neumatico Fuente:http://www.neumac.es/storage/pdf/113/MOTORES%20NEUMATICOS_FOLLETO%20GEN ERAL%20Rev0105.pdf - 97 - Revisiones Descripción Rev Nombre Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Aprobado Solid Edge ST Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Fecha Siemens PLM Software Título: Sistema Completo A4 Plano: 00 Material: Escala Peso Rev Pieza: Revisiones Descripción Rev Fecha Aprobado O 10 27,5 63 23,68 O 25 104 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Actuador rotativo A4 Plano: 01 Material: Aluminio Escala Peso Rev Pieza: 1 Revisiones Descripción Rev Fecha Aprobado 165 120 136 149 4,14 16 Nombre Fecha Dibujado Hugo Galeano 7/06/11 Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Brazo Ventosa A4 Plano: 02 Material: Aluminio Escala Peso Rev Pieza: 2 Revisiones Descripción Fecha Aprobado 24,56 Rev 7,42 4,43 O 8,57 O 21,2 Nombre Fecha Dibujado Hugo Galeano 8/06/11 Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Ventosa A4 Plano: 03 Material: Silicone Escala Peso Rev Pieza: 3 Revisiones Descripción Rev Fecha Aprobado 399,88 399,89 91° 99,97 40,3 300 Nombre Solid Edge ST Fecha Dibujado Hugo Galeano 7/06/11 Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Siemens PLM Software Título: Receptaculo A4 Plano: 04 Escala Peso Rev Pieza: 4 Revisiones Descripción Fecha Aprobado 36,62 33,38 Rev 600 100 600 170 50 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Soporte piston A4 Plano: 05 Material: Aluminio Escala Peso Rev Pieza: 5 Revisiones Descripción Rev Fecha Aprobado 44,85 80 5 46,57 46,57 16,31 R2 R 22,69 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Protector piston A4 Plano: 06 Material: Aluminio Escala Peso Rev Pieza: 6 Revisiones Descripción Rev Fecha Aprobado 24,01 58 29,74 O 7 8,4 18,2 7 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Piston neumático A4 Plano: 07 Material: Aluminio Escala Peso Rev Pieza: 7 x 2 Revisiones Descripción Rev Fecha Aprobado 37,5 R3 7,5 75 775 775 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: deslizadora A4 Plano: 08 Material: Acrilico Escala Peso Rev Pieza: 8 29 Revisiones Descripción Rev Fecha Aprobado 49,5 60,5 6 49,5 O 59, 31 60,5 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Motor A4 Plano: 09 Material: Aluminio Escala Peso Rev Pieza: 9 x 2 Revisiones Descripción Fecha Aprobado 75 Rev 75 40 670 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Banda transportadora A4 Plano: 10 Material: Cold roll Escala Peso Rev Pieza: 10 Revisiones Descripción Rev 75 Fecha Aprobado 75 4,31 R7 3 75 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Guia Banda A4 Plano: 11 Material: Aluminio Escala Peso Rev Pieza: 11 Revisiones Descripción Rev Fecha Aprobado 29,6 50 50 120 115 120 5 Nombre 29,6 Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Soporte Motor A4 Plano: 12 Material: Aluminio Escala Peso Rev Pieza: 12 x 4 Revisiones Descripción Rev Fecha Aprobado 55 25 5 95 100 95 55 25 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Soporte Bandas A4 Plano: 13 Material: Aluminio Escala Peso Rev Pieza: 13 x 14 Revisiones Descripción Rev Fecha Aprobado 77 210 63 25,5 7 25,5 7 77 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Soporte actuador rotativo A4 Plano: 14 Material: Aluminio Escala Peso Rev Pieza: Revisiones Descripción Rev Fecha Aprobado 900 700 O 50 50 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Cilindro sin vastago A4 Plano: 15 Material: Aluminio Escala Peso Rev Pieza: Revisiones Descripción Rev Fecha Aprobado 75 1070 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º 40 40 75 Solid Edge ST Siemens PLM Software Título: Banda transportadora 2 A4 Plano: 16 Material: Cold roll Escala Peso Rev Pieza: Revisiones Descripción Rev Fecha Aprobado 170 550 40 170 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Banda transportadora 3 A4 Plano: 17 Material: Cold roll Escala Peso Rev Pieza: Revisiones Descripción Rev Fecha Aprobado 40 40 495 75 75 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Banda transportadora 4 A4 Plano: 18 Material: Cold roll Escala Peso Rev Pieza: 75 Revisiones Descripción Fecha Aprobado 40 28,28 Rev 520,21 9 5,6 73 Nombre Fecha Dibujado Hugo Galeano Comprobado Aprobado 1 Aprobado 2 Salvo indicación contraria cotas en milímetros ángulos en grados tolerancias ±0,5 y ±1º Solid Edge ST Siemens PLM Software Título: Banda transportadora 5 A4 Plano: 18 Material: Cold roll Escala Peso Rev Pieza:
 0
0
Anuncio
Documentos relacionados



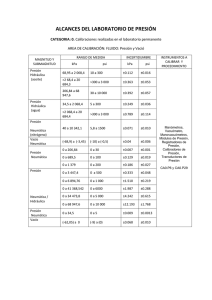

Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados