7. Práctica - Universidad Pública de Navarra
Anuncio

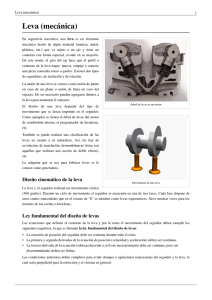
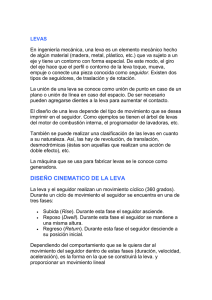
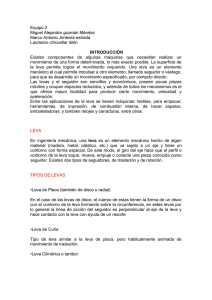
Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa 7. Práctica 7.1.Estudio de Levas 7.1.1. Introducción El principal objetivo de la práctica es observar cual es el funcionamiento de las levas y cual es la función que realizan dentro de los mecanismos en los que se utilizan Hay muchas definiciones de mecanismos de leva. Las más comunes pueden ser las siguientes: La leva es un elemento que efectúa un movimiento de rotación, lo más comúnmente, traslación u oscilación, fácilmente obtenible y que mediante un palpador o seguidor en contacto con ella transforma este movimiento en uno de oscilación que responde a unas características prefijadas, y por lo tanto, deseadas. El palpador tendrá una guía que lo conduce, o bien un punto de rotación. La leva es un elemento mecánico que sirve para impulsar a otro, el seguidor, para que éste desarrolle un movimiento específico, por contacto directo. Son mecanismos sencillos, poco costosos, tienen pocas piezas móviles y ocupan espacios reducidos, pudiéndose lograr casi cualquier tipo de movimiento del seguidor. El objeto de una leva es el de proporcionar un movimiento periódico a una parte de un mecanismo. Una leva plana, la más común, consiste en un plano que gira respecto a un eje perpendicular, y proporciona un movimiento oscilante a un seguidor en contacto con el perfil de ésta. Los principales tipos de levas son: a) Leva de disco o radial b) Leva de cuña c) Leva cilíndrica d) Leva lateral o de cara Práctica 7 ESTUDIO DE LEVAS Y GENERACION DE ENGRANE Pag 1 - 1 - Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa Y respecto a los seguidores: a) de cuña b) de cara plana c) de rodillo d) de cara esférica En el movimiento del mecanismo de una leva existen tres parámetros de control que son: a) Desplazamiento del seguidor en cada instante b) Velocidad del seguidor en cada instante c) Aceleración del seguidor en cada instante El desplazamiento del seguidor se puede obtener para cada ángulo de la leva, bien analítica bien gráficamente y la velocidad y aceleración se lograrán por diferenciación matemática o gráfica. Por lo general los sistemas de levas tienen un único grado de libertad. Casi siempre el movimiento de entrada es de giro, muchas veces a velocidad constante. Así mismo es muy frecuente que el movimiento del palpador sea de traslación y sólo en algún caso angular. Muy típicamente se conoce el movimiento que queremos que tenga el palpador, zona de subida, cuanto debe subir, durante cuanto tiempo etc., y será a partir de esta condición de donde deduciremos el perfil de la leva. El conocimiento del movimiento del seguidor en función del movimiento de entrada a la leva supone así mismo el conocimiento del perfil de la leva. Otro elemento interesante es el llamado cierre de la leva. Es un dispositivo que asegura el contacto entre leva y palpador, bien por el propio peso, por medio de un muelle o bien por la propia forma de la leva. Práctica 7 ESTUDIO DE LEVAS Y GENERACION DE ENGRANE Pag 2 - 2 - Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa En teoría siempre es posible obtener cualquier movimiento del palpador con la leva apropiada, sin embargo existen limitaciones debidas a aceleraciones elevadas. Como ha quedado dicho, generalmente se conoce las características que debe tener el movimiento del palpador, cuanto debe subir etc. El problema radica en diseñar la curva de enlace entre las diferentes posiciones a las que se quiere que llegue o por las que se quiere que pase, teniendo en cuenta aquí los problemas debidos a aceleraciones bruscas. El diseño gráfico de levas trata de determinar el perfil de la leva a partir del movimiento deseado del palpador. La obtención del perfil se realiza manteniendo la leva fija y moviendo el seguidor en el sentido opuesto al de la leva (con objeto de lograr el mismo movimiento relativo). Este proceso es sumamente sencillo y analizando un ejemplo sencillo durante la realización de la práctica el método se explica claramente. El método debe ser modificado ligeramente cuando el seguidor es excéntrico o cuando es plano, pero básicamente son similares. 7.1.2. Derivación del movimiento del seguidor Movimiento del seguidor en función del movimiento de entrada a la leva y = y( θ ) Derivada primera: y ′( θ ) = dy dθ esto es, la pendiente del diagrama de desplazamientos en cada valor del ángulo de entrada. θ. Segunda derivada: Práctica 7 d2 y y ′′( θ ) = dθ 2 ESTUDIO DE LEVAS Y GENERACION DE ENGRANE Pag 3 - 3 - Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa derivada que está relacionada con el radio de curvatura de la leva. Si se conoce el movimiento de entrada en la leva, θ = f ( t ) , se conocerá además su dθ d 2θ velocidad y aceleración : ω = y α = 2 , entonces se sabrá la velocidad y aceleración dt dt del seguidor. y( t ) = y( θ = f ( t ) ) y ( t ) = y( t ) = dy dy dθ = = y′ω dt dθ dt 2 d y d ( y ′ω ) 2 = = y ′′ω + y ′α dt 2 dt 7.1.3. Realización Experimental Apartado 1: La resolución de la practica consistirá en la toma datos de desplazamientos del seguidor de la leva ( yi ) en mecanismos didácticos de los que se dispone en el laboratorio con lo que se dispondrá de la gráfica de desplazamientos experimental. Los desplazamientos ( yi ) podrán ser leídos directamente sobre los mecanismos. Estas posiciones de la salida deberán ser leídas cada 10º de entrada. Con ellos podremos construir una curva de puntos (función discreta), que representa la posición de la salida del mecanismo en función de la entrada. Mediante el método de diferenciación gráfica que se explica a continuación, se obtendrá la gráfica de velocidad experimental para el mecanismo estudiado. Para la obtención de esta gráfica de velocidades además de la curva de posiciones, ya obtenida anteriormente, es necesario conocer el ángulo de entrada en función del tiempo. Supondremos θ = 10 t (ángulo en grados y tiempo en segundos). Práctica 7 ESTUDIO DE LEVAS Y GENERACION DE ENGRANE Pag 4 - 4 - Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa v= La velocidad instantánea es la variación en el tiempo de la posición: dy dt Para calcular la velocidad instantánea necesitamos una función continua de la posición y = f ( t ) del seguidor, y sólo disponemos de una función discreta ( yi ) de dicha posición. Por ello calcularemos la velocidad promedio durante un intervalo, que se define como: vi = ∆y yi − yi−1 = ∆t ∆t Para el calculo de esta velocidad promedio, los desplazamientos serán conocidos (los medidos para la primera gráfica), y el intervalo de tiempo será función de la velocidad angular de entrada. La velocidad angular de la entrada se conoce debido a que sabemos que θ = 10 t . El intervalo de tiempo será entonces, el tiempo que tarda la entrada en recorrer los 10º del intervalo de medición de posiciones si la función del ángulo de entrada de la leva con respecto al tiempo es la anteriormente mencionada. Este método de calcular una velocidad promedio en un intervalo entre dos posiciones conocidas es lo que se conoce como diferenciación gráfica. Para perfiles de leva sencillos, es fácil determinar la función analítica que relaciona el ángulo girado por la leva con el desplazamiento del seguidor, pero en general no es inmediato. Es importante tener en cuenta que la función “y” de la que hablábamos antes es DIFERENTE según el tipo de seguidor elegido. Apartado 2 Para la leva de la figura (circular excéntrica) con seguidor de cara plana: x = R- r- e(cos(alpha)) Práctica 7 ESTUDIO DE LEVAS Y GENERACION DE ENGRANE Pag 5 - 5 - Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa alpha x r=35 R=60 e=25 Se propone, utilizando el desarrollo teórico, deducir analíticamente las ecuaciones correspondientes a velocidad y aceleración. Para comprobar si el resultado es correcto, basta compararlo con el obtenido experimentalmente. 7.1.4. Resultados a presentar 1. Diagrama de desplazamientos y velocidades de la leva que se estudie, que puede ser una de las siguientes: a. leva excéntrica con palpador plano. b. Leva ovoidal con palpador plano, con palpador de rodillo lineal, y palpador de rodillo angular. 2. Del punto 7.1.3 – Apartado 2, deducir las expresiones analíticas de velocidad y aceleración, y comparar los resultados con el diagrama obtenido de ese caso en el punto 1a. 3. Estudiar el árbol de levas de un motor de 4 tiempos describiendo: a. Objeto b. Nº de levas necesarias. Por qué. c. Disposición d. Secuencia de funcionamiento. Los resultados se presentarán por grupos de trabajo y por ordenador (Usar Excel para hacer las gráficas). Práctica 7 ESTUDIO DE LEVAS Y GENERACION DE ENGRANE Pag 6 - 6 - Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa TABLA DE RESULTADOS (datos experimentales) Ángulo de entrada. Unidades en grados º 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250 260 270 280 290 300 310 320 330 340 350 360 Práctica 7 Posición del seguidor. Unidades en mm. Velocidad del seguidor. Unidades en m/s. ESTUDIO DE LEVAS Y GENERACION DE ENGRANE Pag 7 - 7 - Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa GRÁFICAS TIPO DESPLAZAMIENTOS 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360 ANGULO DE ENTRADA VELOCIDADES 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360 ANGULO DE ENTRADA Práctica 7 ESTUDIO DE LEVAS Y GENERACION DE ENGRANE Pag 8 - 8 - Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa 7.2.Generación de Engrane 7.2.1. Introducción Existen muchas formas de tallar engranajes. Durante la realización de esta práctica se verá una de ellas, la generación por cremallera, así como la influencia del desplazamiento en la forma y propiedades de los engranajes. 7.2.2. Realización de la práctica La generación por cremallera es uno de los métodos más empleados para el tallado de engranajes. Por la teoría sabemos que todos los perfiles de evolvente son conjugados a una ruleta constituida por un plano móvil, que apoya sobre una base que es la circunferencia primitiva del engrane, con un perfil solidario que es una recta; por lo tanto, podremos generar engranes mediante una cremallera haciendo que la línea primitiva de ésta ruede sobre la circunferencia primitiva del engrane. En teoría al ir girando la recta, la envolvente de sus distintas posiciones es un perfil de evolvente. En el tallado mediante cremallera esto se realiza mediante dos movimientos que en conjunto equivalen al original: Se gira la rueda a tallar, y se va desplazando la cremallera. Esto se verá más fácilmente al realizar la práctica. Ayudándose de la maqueta, el alumno deberá reproducir diferentes perfiles correspondientes a una de las siguientes posiciones para la cremallera: • • • Práctica 7 Posición nominal. 5 mm. de desplazamiento positivo. 5 mm. de desplazamiento negativo. ESTUDIO DE LEVAS Y GENERACION DE ENGRANE Pag 9 - 9 -