INABENSA
Anuncio

INABENSA
2 Recurso
2.1 Localización mundial del recurso undimotriz
El conocimiento del recurso para la selección de las localizaciones idóneas para el futuro
emplazamiento de plantas es un aspecto crucial en el aprovechamiento de la energía
undimotriz, para muchos autores supone el primer paso fundamental en el que se
sostienen las posteriores labores de diseño de los dispositivos.
En la Figura 2 se muestra una media anual mundial del recurso basado en el registro de
datos realizado en el proyecto WorldWave (1996) durante 10 años. Este mapa muestra
que la mayor densidad de energía de los océanos se da en la latitudes medio-altas, en
particular entre los 40º y 60º.
Figura 2.- Estimación anual mundial de la potencia del oleaje mundial [Cruz, 2008]
En base anual, por tanto, los mayores niveles en el hemisferio norte se encuentran en las
costas oeste de las islas británicas, Islandia y Groenlandia, y algo menor en el litoral
oriental de Estados Unidos y Canadá. En el hemisferio sur, las mejores localizaciones se
encuentran en el sur de Chile, Sudáfrica y toda la zona sur y sudoeste de Australia y
Nueva Zelanda.
Sin embargo es necesario tener en cuenta las variaciones estacionales, ya que en base
anual, el recurso es mucho mayor en el hemisferio sur debido a que las estas variaciones
Línea de Negocio Energías del Mar
10
INABENSA
son menores. Esto puede observarse en la Figura 3, donde se muestra la variación
estacional de la potencia del oleaje en función de la latitud.
Figura 3.- Medida de la potencia del oleaje (kW/m) en función de la latitud para los meses de enero (azul) y julio (rojo). [Cruz, 2008]
De cara al aprovechamiento del potencial undimotriz, sería por tanto más adecuado el
comportamiento del recurso en el hemisferio sur, ya que muestra una mayor regularidad
estacional, traduciéndose en un mayor nivel de energía anual generada.
Existen también estudios sobre la cuantificación del potencial energético de las olas en
Europa [Aquaret, 2010]. En la Figura 4 se observa la gran densidad de este tipo de
energía que se concentra entre las islas de Irlanda y Reino Unido, junto con la zona
sudoeste de Noruega.
Figura 4.- Estimación del potencial del oleaje en Europa [Aquaret, 2010]
A nivel nacional se puede comprobar que la zona con mejores condiciones energéticas
corresponden a las bañadas por el mar Cantábrico y el océano Atlántico. Con respecto
Línea de Negocio Energías del Mar
11
INABENSA
al recurso en Andalucía, en 2009 la Agencia Andaluza de la Energía llevó a cabo un
estudio donde se elaboró un mapa cuantitativo de todas las fuentes de energías del
mar. En la Figura 5 se muestra la energía correspondiente al oleaje de la costa andaluza.
Figura 5.- Flujo de energía asociada al oleaje [Agencia Andaluza de la Energía, 2009]
Su potencial total de aproximadamente 2000 MW, siendo las áreas costeras con cierto
interés la zona atlántica de Cádiz y el levante almeriense, aunque con valores muy
inferiores a valores del norte de España.
Línea de Negocio Energías del Mar
12
INABENSA
2.2 Caracterización de las Olas
Una vez analizado en el apartado anterior la cuantificación media del recurso se tratará
en este de presentar los parámetros que caracterizan el oleaje. Para ello se comienza en
este punto por fenómeno de creación del oleaje, su propagación, y el modelo
matemático más simple para caracterizarlo.
La fuente primaria de energía y la causante de que los mares y océanos no permanezcan
como masas de agua estáticas es el sol.
La tierra recibe, de manera no homogénea, la radiación solar sobre su superficie lo cual
produce una diferencia térmica entre zonas, que se transforma en diferencia de
presiones en la atmósfera que provoca el movimiento de masas de aire, lo que
conocemos como viento. Este, incide sobre la superficie del mar cediéndole parte de su
energía y generado el oleaje. Esta cesión de energía representa una proporción
relativamente baja con respecto al total de energía acumulada cinéticamente en el aire,
estimándose que para que el mar absorba 1 W/m2 la constante solar debe ser de 375
W/m2. La energía de las olas, por tanto, es proporcional a la del viento que las genera, a
su velocidad, su duración y la longitud sobre la cual éste transmite energía a la ola
[Fernández, 2002].
Con el oleaje, por consiguiente, no se mueven masas de agua, excepto en su rotura, lo
que se propaga es su perturbación, similar al movimiento de una bandera ondeando con
el viento. A nivel local, sin embargo, las particulas sí que realizan una trayectoria elíptica
o circular con el paso horizontal de la onda, volviendo al punto inicial donde se
encontraban, como se muestra en la Figura 6. El radio de este movimiento va
disminuyendo con la profundidad.
Figura 6.- Movimiento de las partículas de agua al paso de la onda horizontal. [Rodrigues, 2008]
La densidad energética del oleaje, por tanto, disminuye al acercarse a la costa debido a
la interacción con el lecho marino como se observa en la Figura 7, aunque esto puede
contrarrestarse en caso que se produzcan fenómenos naturales en las ondas como
Línea de Negocio Energías del Mar
13
INABENSA
reflexión, refracción y difracción, dando lugar a lo que se conoce como focos calientes o
“hot spots”[Solé, 2004]
Figura 7.-Influencia de la profundidad en la reducción de las orbitas. [EPRI, 2005]
Se
distinguen
dos
tipos
fundamentales
de
oleaje
de
viento:
•
El SEA, o mar de viento, que es el que se produce en la zona de generación (también
denominada FETCH). Es un oleaje muy desordenado, con frentes pequeños y en
muchas direcciones, aunque predomina la del viento (Figura 8).
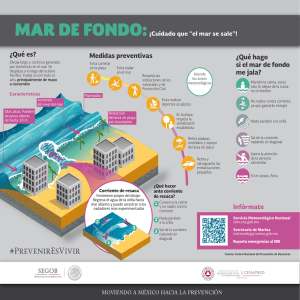
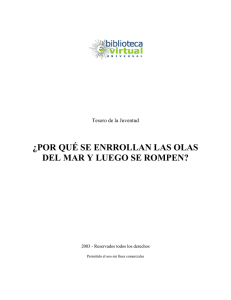
•
El SWELL, o mar de fondo, que se da fuera de la zona de generación, con olas de
diferentes periodos, pero más ordenadas y viajando en una misma dirección
principal, aunque se suele abrir lateralmente unos 15º (Figura 9).
Figura 8.- Mar de viento (SEA). [Medina, 2009]
Figura 9.- Mar de fondo (SWELL). [Medina, 2009]
El oleaje de los océanos alberga todos los tipos de ondas posibles, y estas pueden ser
clasificadas en función de parámetros como tiempo, fuerza perturbadora, duración de la
fuerza motora y periodo, como observamos en la Figura 10.
Línea de Negocio Energías del Mar
14
INABENSA
Figura 10.- Clasificación de las olas en función de la causa que la genera y la energía almacenada en ella. [Fernández, 2002]
El perfil de una ola viene determinado por el parámetro que resulta de la relación entre
su altura (H) y su longitud de onda (λ), H/λ, definida, esta última, como la distancia entre
dos crestas consecutivas (Figura 11).
Atendiendo a este parámetro podemos dividir las olas en dos grupos, olas ‘cortas’,
donde la relación H/ λ es pequeña, del orden de 1/50 o inferior y olas con una relación
H/ λ grande.
En las primeras, la altura es del orden de centímetros o metros mientras que su longitud
es de kilómetros. Este tipo de oleaje es característico de aguas profundas y puede ser
modelado mediante una teoría lineal que será expuesta posteriormente.
El segundo tipo, con H/ λ grande, muestra un perfil troncoidal, y es más característico de
zonas cercanas a la costa. Cuando el valor del parámetro de clasificación es muy
elevado, superior a 17, se produce la rotura de la ola. El comportamiento de este tipo de
oleaje ha de ser modelado mediante una teoría no lineal (Figura 11).
Figura 11.- Onda no lineal. [Fernández, 2002]
En el primer tipo, las olas ‘cortas’ características de zonas de aguas profundas, se
centrará el análisis. En la Tabla 1 se presentan los distintos parámetros, y sus
expresiones, mediante los cuales éstas se clasifican.
Línea de Negocio Energías del Mar
15
INABENSA
Tabla 1.- Parámetros característicos del oleaje.
Periodo
Tiempo que transcurre entre el paso de
dos crestas sucesivas por el mismo punto.
Frecuencia
Número de crestas que pasan cada
segundo por un punto fijo. Es la inversa
del periodo.
2π
T=
ω
1
T
f =
H
Altura
Distancia vertical entre un seno y una
cresta sucesiva.
H/2
Amplitud
Máxima desviación desde el nivel medio.
Longitud de onda
Distancia horizontal entre dos crestas
sucesivas.
Celeridad
Velocidad de traslación de la onda
Para un grupo de olas
gT 2
2π
λ=
C=
Cg =
λ
=
T
gT
2π
C gT
=
2 4π
Número de onda
k=
2π
L
Peralte
ε=
H
L
Profundidad relativa
d
L
Altura de la ola relativa
h
d
Línea de Negocio Energías del Mar
16
INABENSA
Figura 12.- Parámetros de una onda ideal. [Medina, 2009]
Para cuantificar energéticamente el potencial de una ola, ha de tenerse en cuenta que
puede ser extraída energía contenida en esta en forma de energía cinética y potencial
del conjunto de partículas que la componen. Quedando entonces la expresión para el
cálculo de su energía como:
W
E
s
ρ g λbH 2 ρ g 2T 2bH 2
=
E
=
E
=
=
p
c
16
32π
Donde ρ es la densidad del agua, igual a 1028 Kg/m3, y b es el ancho de la cresta o
longitud del frente de ola.
Puede observarse que la energía contenida en el oleaje depende de la altura de esta de
manera cuadrática, por tanto, la disminución de dicha altura con la profundidad del mar
es un efecto muy importante en el estudio del oleaje en profundidad. La presión de las
olas varía, al igual que la energía, con el cuadrado de la amplitud y se atenúa con la
profundidad en forma exponencial [Fernández, 2002].
En aguas profundas (h > λ/2) se cumple que cg = c/2 al disiparse energía en las olas que
están en cabeza del grupo, terminando por desaparecer, al mismo tiempo que se crean
nuevas en la cola del grupo. Según esto, la expresión de la potencia P por unidad de
longitud (b = 1) de frente de ola en función del período es:
kW
P
m
2
2
2
2
ρ gbH cg ρ gbH c ρ g H T
=
=
=
8
16
32π
La energía contenida en el oleaje varía sustancialmente con la latitud de la tierra y los
climas como se observó en la primera parte del capítulo.
Para tener un orden de magnitud, en zonas del Atlántico y del norte del Japón, las olas
pueden alcanzar una densidad de energía del orden de 10 MW por kilómetro de frente
de onda, mientras que en Irlanda se alcanzan los 70 MW por kilómetro.
Las expresiones anteriormente mostradas corresponden a estudio teóricos del oleaje,
pero sin embargo, su estudio real es realmente complejo debido a que en el mar se
daría una superposición compleja de numerosos trenes de olas no regulares con
distintos valores de su período, altura, dirección, etc.
Línea de Negocio Energías del Mar
17
INABENSA
Debido a esta heterogeneidad del oleaje real se definen dos parámetros característicos:
•
Altura significante. Hs: Se entiende como la altura media del tercio de las olas
mayores.
•
Periodo. Tz: Tiempo de paso de dos olas consecutivas por una línea imaginaria a la
mitad de la distancia entre la cresta y el valle, o período medio de paso por 0
[Fernández, 2002].
En función de Hs y Tz el potencial energético del oleaje puede ser calculado mediante el
diagrama de Pierson-Moskowitz, mostrado en la Figura 13, o mediante las diferentes
expresiones formuladas del espectro direccional del oleaje o funciones de densidad de
probabilidad de distribución del espectro de energía, que depende de la dirección y
frecuencia de este [Vining, 2005], presentadas en la Tabla 2.
Figura 13.- Potencia por frente de ola en función de su altura y periodo. [Vining, 2005]
Línea de Negocio Energías del Mar
18
INABENSA
Tabla 2.- Expresiones de la potencia del oleaje para los distintos espectros
Espectro
Expresión
ISSC
kW
P
m
2
= 0,5949 H s Tz
Bretschneider-Mitsuyasu
kW
P
m
2
= 0, 441H s Tz
Jonswap
kW
P
m
2
= 0, 458 H s Tz
Pierson-Moskowitz
kW
P
m
2
= 0,549 H s Tz
Nath
Hs
kW
2
P
= 0,538 H s Tz + 0, 491
Tz
m
3
Se presenta ahora la teoría de oleaje más simple, la teoría lineal de ondas, también
denominada teoría de Airy.
Aunque con limitaciones a su aplicabilidad, la teoría lineal puede ser muy útil si las
hipótesis de partida se cumplen:
1. El agua es homogénea e incompresible; (lo que implica que la densidad, ρ, es
constante.
2. La tensión superficial puede ser despreciada.
3. El efecto de Coriolis debido a la rotación de la tierra puede ser asimismo
despreciado.
4. La presión en la superficie libre del mar es uniforme y constante.
5. El agua del mar carece de viscosidad.
6. No existe interacción del oleaje con ningún otro movimiento marino. El flujo es
irrotacional.
7. El fondo del mar constituye un límite horizontal, fijo e impermeable, lo que
implica que la velocidad vertical en él es nula.
8. La amplitud de onda es pequeña y su forma es invariable en el tiempo y espacio.
9. Las ondas son planas (de dos dimensiones).
De las hipótesis anteriores, la 1ª, 2ª y 3ª pueden ser asumidas en la mayor parte de
problemas de Ingeniería Marítima. Las tres últimas han de asumirse necesariamente en
la mayor parte de los problemas de Ingeniería Costera y Portuaria.
Una conclusión de la1ª hipótesis estriba en que las líneas de corriente en un fluido
incompresible son paralelas. En efecto, la ecuación de conservación de masa dice que:
Línea de Negocio Energías del Mar
19
INABENSA
∂ρ
+ ∇( ρ u ) = 0
∂t
Si el fluido es incompresible, la densidad es constante, y su divergencia cero. Por tanto,
la ecuación anterior se puede escribir:
∇(u ) = 0
lo que quiere decir que la divergencia de la velocidad es nula, o lo que es lo mismo, que
las líneas de flujo son paralelas.
El hecho de que el flujo sea irrotacional implica que el campo correspondiente deriva de
un potencial, es decir, que puede escribirse, para la velocidad horizontal, u, y vertical, w,
las siguientes ecuaciones:
u=
∂φ
∂φ
ω=
∂x
∂z
La ecuación anterior implica que si se conoce el potencial Φ (x, z, t) en todo el ámbito
del estudio, se pueden conocer también las velocidades de las partículas.
En general, la onda se caracteriza por su longitud, L, su altura, H, su periodo, T, y la
profundidad, d, sobre la que se propaga (Figura 14).
Figura 14.- Representación de una onda de Airy
Además de estos parámetros y los ya definidos anteriormente en este capítulo es
necesario la introducción de un nuevo parámetro como es la dispersión del oleaje.
La llamada ecuación de dispersión relaciona la celeridad con la profundidad y la longitud
de onda. El concepto de dispersión es de capital importancia para comprender
Línea de Negocio Energías del Mar
20
INABENSA
fenómenos como el agrupamiento del oleaje y los efectos que éste puede causar,
principalmente la resonancia en dársenas portuarias.
La ecuación de dispersión se escribe:
c=
gL
2π d
tanh
2π
L
Combinando la ecuación anterior con la de celeridad anteriormente presentada, se
puede escribir:
c=
gT
2π d
tanh
2π
L
En la ecuación anterior se puede comprobar que una ola viaja tanto más rápido cuanto
mayor es su periodo. El concepto de dispersión implica que las olas se separan en su
propagación hacia la costa, ordenándose por sus periodos. Comúnmente, dentro de un
mismo tren de ondas, las olas de mayor periodo suelen tener también mayor altura, por
lo cual al salir del área de generación, o fetch, el registro de oleaje tiende a ordenarse en
grupos de olas, como se indica en la Figura 15.
Figura 15.- Grupo de olas. [Medina, 2009]
En función del número de onda, k, y la frecuencia angular, ω y de la ecuación de
dispersión, puede escribirse la longitud de onda como:
gT 2
2π d gT
L=
tanh
tanh(kd )
=
2π
L ω
Como puede observarse, la ecuación que proporciona la longitud de onda ha de
resolverse necesariamente por iteraciones.
Esta ecuación indica que la longitud de onda decrece con la profundidad, debido al
comportamiento de la función tanh(kd), que se incrementa linealmente con valores
pequeños de kd, pero tiende asintóticamente a la unidad en profundidades indefinidas.
En profundidades indefinidas, puede considerarse que la tangente hiperbólica tiende a
la unidad, y por tanto, la longitud de onda es:
L0 ≈
Línea de Negocio Energías del Mar
gT 2
= 1,56T 2
2π
21
INABENSA
Para evitar el problema que representa la resolución de la ecuación de la longitud de
onda, se han desarrollado numerosas aproximaciones; una de las más empleadas es la
de Fenton y McKee (1.990), que se escribe como:
d
g
L = L0 tanh 2π
T
3
2
2
3
En la siguiente tabla se recogen las formas asintóticas de las funciones hiperbólicas.
Tabla 3.- Formas asintóticas de las funciones hiperbólicas
Función
kd<π
kd>(π/10)
Cosh(kd)
1 kd
e
2
1
Senh(kd)
( Im + δe )
kd
Tanh(kd)
1
kd
•
Clasificación de las zonas en que se propaga el oleaje
Las zonas a través de las cuales se propaga el oleaje se clasifican según su profundidad
relativa, d/L. así, se pueden distinguir las tres zonas que se indican en la Tabla 4:
Tabla 4.- Clasificación de las distintas zonas de oleaje.
Zona
d/L
kd
Tanh(kd)
½a∞
πa∞
~1
1/20 a 1/2
π/10 a π
Tanh(kd)
0 a 1/20
0 a π/10
~kd
Profundidades
Indefinidas
Aguas de transición
Profundidades
reducidas
•
Ecuaciones generales y soluciones teóricas
En la Tabla 5 se muestra un resumen de las principales relaciones en la teoría lineal de
ondas.
Línea de Negocio Energías del Mar
22
INABENSA
Tabla 5.- Relaciones en teoría lineal. [CEM, 2001]
Relative
Depth
Shallow Water
Transitional Water
Deep Water
d 1
<
L 25
1 d 1
< <
25 L 2
d 1
>
L 2
Wave profile
Same as >
η=
H
2π x 2π t H
cos
−
= cos θ
2
T 2
L
Wave celerity
C=
C=
L gT
2π d
=
tanh
T 2π
L
C = C0 =
L gT
=
T 2π
Wavelenght
L = T gd = CT
L=
gT 2
2π d
tanh
2π
L
L = Lo =
gT 2
= C0T
2π
Group
velocuty
C g = C = gd
Water particle
velocity
L
= gd
T
C g = nC =
Horizontal
u=
H
2
Vertical
w=
Hz
z
1 + sin θ
T d
Water particle
accelerations
g
cos θ
2
Horizontal
Hz
σx =
T
g
sin θ
d
Vertical
z
π
σ z = −2 H 1 + cos θ
T d
2
Water particle
displacements
HT
4x
g
sin θ
d
Horizontal
ζ =−
Vertical
ζ =
Surface
pressure
p = ρ g (η − z )
H
2
z
1 + cos θ
d
Línea de Negocio Energías del Mar
u=
1
4 xd / L
1−
C
2 sinh(4 xd / L)
H gT cosh 2π ( z + d ) / L
cos θ
2 L
cosh ( 2π d / L )
<Same as
1
gT
Cg = C =
2
4π
u=
2π d
L
nH
e
T
cos θ
2π d
L
H gT sinh 2π ( z + d ) / L
w=
sin θ
2 L
cosh ( 2π d / L )
nH
w=
e
T
gπ H cosh 2π ( z + d ) / L
σx =
sin θ
L
cosh ( 2π d / L )
π
σ x = 2 H e
T
gπ H sinh 2π ( z + d ) / L
σz = −
cos θ
L
cosh ( 2π d / L )
π
σ z = −2 H e
T
ζ =−
H cosh 2π ( z + d ) / L
sin θ
2
sinh ( z + d ) / L
H sinh 2π ( z + d ) / L
ζ =
cos θ
2
sinh ( z + d ) / L
p = ρ gη
cosh 2π ( z + d ) / L
cosh ( 2π d / L )
− ρ gz
sin θ
2π x
T
2
2
ζ =−
2π z
L
H
e
2
2π z
L
H
ζ = e
2
p = ρ gη e
2π x
T
sin θ
cos θ
2π z
L
− ρ gz
23
sin θ
cos θ
INABENSA
2.3 Hidrodinámica
En este apartado, una vez analizado detenidamente el potencial y los parámetros y
ecuaciones que lo gobiernan es necesario el estudio de la interacción entre el recurso y
el dispositivo encargado de la extracción de su energía.
El estudio de la hidrodinámica de los convertidores de energía de las olas podría basarse
en los estudios anteriores realizados sobre la dinámica de los buques en el mar, que tuvo
lugar en las décadas anteriores a los setenta. La presencia de un sistema de conversión
(PTO) y el requisito de aumentar al máximo la energía extraída presenta problemas
adicionales.
Los desarrollos teóricos abordaron por primera vez la extracción de energía de ondas
regulares (sinusoidales) de un cuerpo flotante que oscila de un modo simple (un grado
de libertad) con un PTO lineal. Un supuesto adicional para la teoría de las ondas fue
tomar pequeñas amplitudes y movimientos. Esto permitió la linealización de las
ecuaciones que gobiernan el movimiento y el uso del análisis en el dominio de la
frecuencia.
Las fuerzas hidrodinámicas sobre la superficie mojada del cuerpo se descomponen en las
fuerzas de excitación (debido a las ondas incidente), las fuerzas de la radiación (debido
al movimiento del cuerpo) y las fuerzas hidrostáticas (relacionada con la posición
instantánea del cuerpo flotante con respecto a la tranquila libre superficie). En
consecuencia, dependiendo de la frecuencia, se han definido los coeficientes
hidrodinámicos, que se determinarán teóricamente o calculados con ayuda de métodos
computacionales, generalmente se basa en el método de los elementos de contorno.
Estas son las técnicas ya conocidas para la hidrodinámica de buques.
Puede ser ilustrado como un caso simple de un cuerpo flotante de masa ‘m’ oscilando
verticalmente, con un único grado de libertad. Si la posición del cuerpo está definida por
la coordenada vertical x , con x = 0 en agua calma, la ecuación de movimiento es
( m + A) ɺɺx =
f d − Bxɺ − ρ gSx + f PTO
Donde f d es la componente vertical de la fuerza de excitación que actúa sobre el
cuerpo, siendo nula para agua calma. f PTO representa la componente de la fuerza
ejercida por el PTO, A ( v ) es el coeficiente hidrodinámico de masa agregado, el cual
tiene en cuenta la inercia del agua que rodea al cuerpo, B ( v ) es el radiación coeficiente
de amortiguamiento de radiación que representa la amortiguación en el cuerpo debido
a la transferencia de energía de las ondas radiadas a distancia y S es el área transversal
del cuerpo por el plano de la superficie libre ( ρ gSx representa la fuerza hidrostática de
la restauración)
Asumimos la fuerza que la fuerza del PTO consiste en un amortiguador lineal de
coeficiente C y un resorte lineal cuya rigidez es K y escribir f PTO como:
f PTO = −Cxɺ − Kx
Línea de Negocio Energías del Mar
24
INABENSA
Por lo que todo el sistema se vuelve completamente lineal. En las ondas regulares de
amplitud Aw y frecuencia ω, se puede escribir
{ x, f d } = Re ({ X , Fd } eiωt )
donde X y Fd son amplitudes complejas y Re indica su parte real. Por tanto, obtenemos:
X=
Fd
−ω ( m + A ) + iω ( B + C ) + ρ gS + K
2
Dado que el sistema es lineal, la fuerza de excitación es proporcional a la amplitud de
onda, Fd = ΓAw donde Γ ( ω ) es un coeficiente hidrodinámico de la fuerza de excitación,
cuya expresión es
Γ=
2g 3 ρ B
ω3
La potencia media absorbida es
P = f d xɺ =
Cω 2 X 2
2
y puede ser escrita como:
P=
F
1
B
2
Fd − U − d
8B
2
2B
2
Donde U = iω X es la amplitud compleja de la velocidad xɺ
Para un cuerpo y ola regular incidente dados, B y Fd son fijas. Por tanto, la potencia
absorbida depende de X , en los coeficientes de amortiguación y rigidez del PTO. La
ecuación anterior de la potencia puede tomar por tanto un valor máximo igual a:
PMAX =
1
Fd
8B
2
Y esto sucede para U = FC / 2 B , que combinada con la ecuación de movimiento da dos
condiciones óptimas con cantidades reales:
1
ρ gS + K 2
ω =
m + A (ω )
C = B (ω )
Línea de Negocio Energías del Mar
25
INABENSA
La primera de ellas es una condición de resonancia, el término de la derecha indica la
frecuencia de libre oscilación de un cuerpo no amortiguado de masa ( m + A ) y rigidez
( ρ gS + k ) .
La segunda demuestra que el amortiguamiento optimo del PTO debe ser igual al
amortiguamiento que ejerce las olas al cuerpo, o dicho de otra forma, la energía cinética
del cuerpo al desplazarse que se disipa al fluido al encontrarse semi-inmerso en él.
Es conveniente introducir el concepto de ancho de captura o de absorción como:
L=
P
E
Siendo E el flujo de energía de las olas por longitud unidad de cresta. Puede
comprobarse que:
P λ
LMAX = =
E 2π
Para un cuerpo con eje de simetría vertical (pero de geometría arbitraria) oscilando
verticalmente, y LMAX = λ / π si el cuerpo oscila en balanceo, siendo λ para este caso la
longitud de onda de la ola. La ecuación anterior es un importante resultado teórico
obtenido de forma independiente, entre los años 1975 – 1976, por Budal y Falnes,
Evans, Newman y Mei, fijando la potencia máxima que puede ser absorbida de las olas,
de igual forma que el límite de Betz establece la máxima potencia absorbible en turbinas
eólicas.
Las curvas de comportamiento para un flotador oscilando verticalmente, cuya parte
sumergida sea de forma semiesférica, pueden ser fácilmente obtenida de los resultados
de los coeficientes hidrodinámicos derivados analíticamente por Hulme para aguas
profundas. En la Figura 16, se representa de forma adimensional las variables P/Pmax y
X / Aw frente al periodo adimensional de las olas T opt para varios valores del coeficiente
de amortiguamiento C opt del PTO, siendo las expresiones de ambas variables:
1
T opt
g 2
= T
a
Donde ‘a’ es el radio de la semiesfera y T = 2π / ω el periodo de la ola.
5
1
C opt = ρ a 2 g 2 C
Línea de Negocio Energías del Mar
26
INABENSA
Figura 16.- Curvas adimensionales del comportamiento frente al periodo de la ola, en una boya con PTO de amortiguación lineal.
[Falçao, 2010]
Para este planteamiento se asume que no existe rigidez, K = 0 . Sustituyendo estos
valores en las condiciones de optimización, anteriormente obtenidas, se obtiene un
periodo óptimo de T * = 6.11 y un amortiguamiento C * = 0.510 . Para g = 9.8m / s 2 ,
despejando de la ecuación obtenemos un radio de la semiesfera óptimo a = 0.262T 2 (a
en metros y el periodo de la ola en segundos). Tomando T = 10 s , valor promedio en el
Atlántico norte, obtenemos un radio óptimo de a = 26.2 metros para una boya de base
semiesférica en resonancia que oscila verticalmente. Analizando estos valores en las
curvas de la Figura 3.126, se tiene para un periodo T = 10 s . una respuesta adimensional
de X / Aw = 0.909 .
Control de Fase o de Amplitud
Como ya se vio, la absorción de la energía de las olas implica una cadena de procesos de
conversión, cada uno de los cuales caracterizado por su eficiencia y las limitaciones que
introducen, razones por las cuales se requiere de un sistema de control sobre el
dispositivo.
Los estudios teóricos en los cuerpos oscilante y en convertidores CAO relevaron que, si
el dispositivo absorbe la energía de las olas de forma eficiente, su frecuencia de
oscilación se encuentra dentro del rango de la frecuencia de las olas que le llegan, lo
que significa que opera en condiciones cercanas al fenómeno de resonancia. Este
requerimiento, determinante para alcanzar el funcionamiento óptimo en el dispositivo,
ha causado numerosos fallos en inventores que consideraron el sistema como cuasiestático (buscando seguir el movimiento de la superficie de la ola), en vez de dinámico.
Los métodos de control de fase presentan en la práctica serias dificultades para su
ajuste. Una de ellas es la propia frecuencia natural de oscilación del cuerpo. En la
mayoría de los dispositivos, excepto si el cuerpo es bastante grande (más de 10 m. como
hemos visto en el apartado anterior), su frecuencia natural es mucho más grande en
comparación con la frecuencias típicas de las olas oceánicas. La segunda dificultad se
encuentra en la multitud de frecuencias presentes en que las olas reales.
Línea de Negocio Energías del Mar
27
INABENSA
Se han planteado diversas estrategias de control de fase, también para dispositivos que
se encuentren sometidos a olas de perfil real. Algunas de estas estrategias se encuentran
resumidas en la Tabla 6.
Tabla 6.- Principales tipos de control de fase
Tipo
Principio
Observaciones
Reactive Control
Reduce la frecuencia de Se pierde más energía de la
oscilación del dispositivo que se gana.
reduciendo su rigidez.
(la frecuencia de oscilación
de un dispositivo suele ser
mayor que la de las olas)
Latching
Bloqueo en el movimiento El más eficiente
del
dispositivo,
consiguiendo que oscile a
la
frecuencia
del
movimiento del a ola.
Unclutching
Sistema
de
control
eléctrico. Enciende y apaga
alternativamente
el
dispositivo,
consiguiendo
una
señal
eléctrica
producida en los intervalos
de olas adecuados
Muchas estrategias de control de fase han sido planteadas, incluido para dispositivos
que se encuentren sometidos a olas de perfil olas reales.
Línea de Negocio Energías del Mar
28