Capítulo 4 Comparación entre sistemas de accionamiento
Anuncio

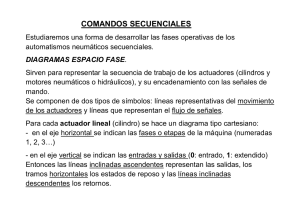
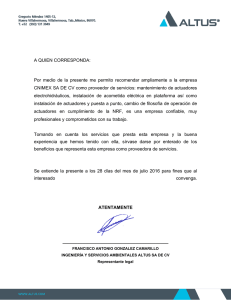
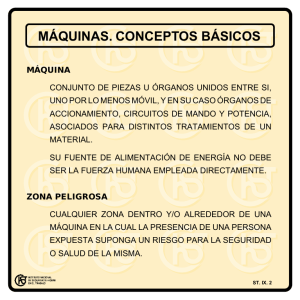
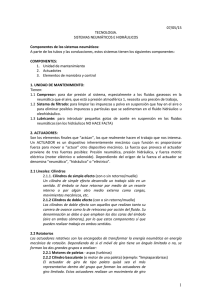
Capítulo 4 Comparación entre sistemas de accionamiento 4.1. Introducción En este apartado se realizará una comparativa entre dos de los sistemas de accionamiento anteriormente explicados. Debido a la irrupción de la configuración de avión “More-Electric Aircraft” y, por tanto, a la progresiva sustitución de los sistemas de accionamiento hidráulico, neumático y mecánico por sistemas de accionamiento completamente eléctrico, se va a establecer dicha comparativa entre los sistemas de accionamiento eléctrico e hidráulico. El motivo de la elección del sistema de accionamiento hidráulico es debido al enfoque de este proyecto en los actuadores de las partes móviles de control de vuelo y de la importancia de este sistema de accionamiento en ellos. Estos dos sistemas de accionamiento se encuentran siendo objeto de estudio en la actualidad debido a su gran margen de mejora y a la gran importancia que gozan dentro del control de vuelo. Una vez establecida la comparativa entre los dos sistemas de accionamiento, se realizarán comparaciones de las características de los distintos actuadores eléctricos. Para ello, se harán uso de los actuadores explicados en el capítulo anterior. Además se hará una comparativa entre los motores tradicionales y los motores más eléctricos o “More-Electric Engine”, es decir, la sustitución del sistema neumático por el sistema eléctrico. 65 66 4.2. Capítulo 4. Comparación entre sistemas de accionamiento Comparación entre sistema de accionamiento hidráulico y eléctrico Para asegurar el buen funcionamiento de todos los sistemas instalados en un avión, es necesario que exista una buena coordinación y funcionamiento entre ellos. Los sistemas de a bordo se encargan de establecer una buena comunicación entre los diferentes aparatos o equipos entre los que se pueden destacar el sistema de control de vuelo, de navegación, de comunicación, etc. Este tipo de sistemas son alimentados por los sistemas hidráulico, neumático, mecánico y eléctrico. En especial, los sistemas de control de vuelo son accionados, principalmente, por los sistemas hidráulicos y eléctricos, de ahí el interés por esta comparativa además de la evolución producida en estos sistemas. A continuación, se va a exponer una tabla donde se refleja la evolución de los actuadores en función de la época del siglo XX o siglo XXI que se desarrolla y de la señalización y alimentación utilizada para su funcionamiento. Años Inicio - 1940 1940 - 1980 1980 - 2000 2000 - 2020 Actuador Mecánico Hidromecánico Servo-hidráulico Servo-hidráulico (SHA) + Electrohidrostático (EHA) + Electromecánico (EMA) Señalización Mecánica Mecánica Fly-By-Wire Fly-By-Wire Alimentación Mecánica Hidráulica Hidráulica Power-By-Wire + Hidráulico Tabla 4.1: Tipos de actuadores usados en aviones Los sistemas de alimentación hidráulicos introducidos en los años 40, tienen el objetivo, entre otros, de alimentar los actuadores de control de vuelo. Estos sistemas de accionamiento poseen una gran fiabilidad y una alta densidad de energía transmitiendo grandes fuerzas realizando pequeños movimientos en cabina. Aun así, este sistema requiere de un alto mantenimiento, y su alto peso es debido a los largos tubos, fluidos hidráulicos, válvulas, tanques, etc... que lleva instalado. Los sistemas hidráulicos, antes de la aparición de “Power-By-Wire”, eran completamente centralizados y ello requería de una gran cantidad de tubos, además de mantener la presión del sistema. Estos Capítulo 4. Comparación entre sistemas de accionamiento 67 tubos se extendían desde los motores hasta las alas, morro o cola del avión, es decir, largos recorridos que provocaban un aumento de la probabilidad de producirse cualquier fuga hidráulica. A finales de los años 90, la tecnología “Power-by-Wire” (PBW) se desarrolló para reemplazar estos sistemas de accionamiento hidráulicos centralizados [3]. Se pensó que el concepto de “More-Electric Aircraft” o “All-Electric Aircraft” podía ofrecer ahorros significativos en el peso del avión si las tuberías y otros componentes hidráulicos pesados y voluminosos podían ser eliminados o sustituidos por componentes eléctricos. Además se reduciría la complejidad del sistema hidráulico y el nivel de mantenimiento exigido. Otra ventajas adquiridas con la incorporación de esta tecnología serían: - Eliminación de los problemas de vibraciones en las tuberías. - Aumento de la fiabilidad debido a la reducción de elementos y componentes hidráulicos. - Incremento del rendimiento de los sistemas debido a la disminución de elementos y de pérdidas de presión gracias a la ausencia de válvulas. Además de todas estas ventajas, el PBW permitía la posibilidad de obtener flujo de energía a demanda y la presión controlada electrónicamente. Esta tecnología es ahora aplicable gracias a la capacidad creciente de generación eléctrica, transmisión y distribución. Un ejemplo claro de aplicación de la tecnología PBW son los mandos de vuelo. Por ejemplo, el actuador electro-hidrostático (EHA) no necesita de una conexión al sistema hidráulico centralizado del avión. El esquema de funcionamiento del EHA permite reducir el grado de tubería hidráulica necesaria en la red. En la tecnología PBW, los valores de control de la energía eléctrica se obtienen directamente de la red eléctrica instalada en el avión y no del sistema hidráulico centralizado. Esta tecnología posee un diseño modular, es decir, divididos por módulos o secciones, que permite la reducción de peso requerido por los sistemas. Este diseño también permite reducir los costes de mantenimiento, además de simplificar los procedimientos de instalación ya que, ante la existencia de una avería de un elemento en una parte del avión, ésta puede ser arreglada sustituyendo el elemento averiado por otro nuevo. El diseño modular permite la reutilización de piezas de un avión a otro, y por tanto, reduce también los costes de desarrollo. En cuanto al sistema de tolerancia a fallos, resaltar que un fallo en el sistema hidráulico centralizado provoca fallos en otros sistemas o reduce el 68 Capítulo 4. Comparación entre sistemas de accionamiento rendimiento general del avión, mientras que si se produce un fallo en el sistema modular del PBW, el sistema principal es dejado fuera de servicio y existen sistemas redundantes que permitirían completar la acción. Los niveles de tensión del sistema eléctrico de un avión se encuentra en una mejora progresiva. Los sistemas de alta tensión usados, “High Voltage Direct Current” HVDC o “High Voltage Alternating Current” HVAC, alcanzan niveles de tensión de hasta 540 V en corriente continua, o en su defecto +/- 270 V C.C. y de 230/400 V C.A. en un sistema trifásico con frecuencia variable o fija. El motivo del uso de estos niveles de tensión se debe a que, en un primer momento, la "primera generación de aviones más eléctricos", que utiliza grandes cantidades de energías, se correspondía con el avión Airbus 380 que consumía alrededor de 415 kVA. Como consecuencia de ello, los sistemas de baja tensión no eran capaces de hacer frente a estas grandes demandas de energía, por ello optaron por aumentar el nivel de tensión. La siguiente generación de “More Electric Aircraft”, como el B787 y el A350 están consumiendo alrededor de 1450 kVA y 800 kVA respectivamente. Esta es la razón por la cual la tensión alterna generada se ha incrementado desde 115 V C.A. a 400 Hz (actualmente se utiliza en los aviones convencionales), a 230 V C.A. a 360-800 Hz. Esta tensión se rectifica mejor mediante convertidores electrónicos de potencia para producir niveles de tensión de +/- 270 V C.C. (540 V C.C.). En la figura 4.1, se muestra una comparativa entre los diferentes valores del sistema tradicional eléctrico y de los sistemas HVAC y HVDC ante una carga de 10 kW. De ella se extrae que para el caso de HVDC, sólo es necesario dos conductores ya que los sistemas de transmisión de corriente continua sólo contienen la polaridad positiva mientras que para el caso de HVAC se requieren tres conductores ante la misma capacidad de corriente demandada. También se observa que las pérdidas de transmisión de energía de HVDC es un 33 % respecto de HVAC y un 67 % respecto al sistema convencional [35]. Además, el efecto pelicular no ocurre en corriente continua por lo que también es beneficioso en la reducción de las pérdidas de potencia. Por otro lado, el efecto corona tiende a ser menos significativo en C.C. que para los conductores de corriente alterna. La utilización de niveles de tensión superiores en HVDC conllevan varios efectos positivos como: - El manejo de corrientes unas 10 veces menores para las mismas potencias demandadas. Esta disminución de intensidad supone un decremento de Capítulo 4. Comparación entre sistemas de accionamiento 69 Figura 4.1: Valores de sistemas de distribución eléctrica ante carga de 10 kW. la sección del cable provocando un ahorro del peso del avión. A esta disminución también contribuyen unos convertidores eléctricos más livianos. - Las pérdidas de potencia disminuyen gracias al alto nivel de tensión y el uso de redes de corriente continua que eliminan la potencia reactiva. Gracias a esta reducción de las pérdidas de potencia, el sistema de acondicionamiento ambiental posee una menor demanda de potencia térmica. En línea con las actividades de un avión más eléctrico y con los sistemas de transmisión de energía eléctrica, la empresa EADS desarrolló una arquitectura de distribución a 270 V en C.C. El objetivo era dar a conocer las ventajas y los posibles problemas que pueden presentan los nuevos sistemas de distribución de potencia eléctrica de alta tensión, en comparación con los sistemas de distribución convencionales [28]. Existen diferentes disposiciones de redes de transmisión HVDC dependiendo del nivel de tensión demandada por las cargas o del número de fases. A continuación en la figura 4.2, se muestra el porcentaje de peso de los cables de cabina de cada una de las diferentes configuraciones de HVDC y HVAC con un número concreto (8) de unidades de distribución de energía secundaria (SPDBs) en relación al peso de la distribución actual de los cables en cabina. De la gráfica anterior se observa que las tres primeras configuraciones son las que posee un mayor ahorro en peso de cable con niveles de tensión de 270 V en C.C. y con niveles de 28 V en C.C. descentralizado. La referencia 70 Capítulo 4. Comparación entre sistemas de accionamiento Figura 4.2: Reducción en porcentaje de peso de las distintas configuraciones de sistemas de transmisión. tomada es un avión de corto-medio alcance y con una distribución de sistema de energía eléctrica cuyo peso es de 200 Kg (se considera el peso de todos los cables junto con el peso del sistema de distribución secundaria). En [36], también se muestra un estudio de las diferentes arquitecturas a distintos niveles de tensión junto con la tensión de suministro, obteniendo como resumen la tabla 4.2. De ella se extrae que las configuraciones más livianas son las expuestas en la última y primera fila respectivamente. En estos sistemas de transmisión también hay que tener en cuenta los pesos de convertidores, rectificadores o inversores. Si se hace uso del sistema HVDC, se consiguen reducciones de peso de más de 350 kg o, con el HVAC reducciones de 240 kg respecto al sistema convencional [35]. En [37], se trata la integración de la red HVDC en los aviones actuales junto con las ventajas ya comentadas. Se presentan las diferentes partes de los convertidores, rectificadores e inversores que forman parte del sistema de Capítulo 4. Comparación entre sistemas de accionamiento Arquitectura de referencia de SPBD a 115 V C.A. Arquitectura +/- 270 V C.C. / 0 V con suministro de 230 V C.A. Arquitectura 270 V C.C. / 0 V con un transformador de aislamiento y suministro de 115 V C.A. Arquitectura 270 V C.C. / 0 V con suministro de 230 V C.A. Arquitectura +/- 135 V C.C. con suministro de 115 V C.A. Arquitectura 270 V C.C. / 0 V con suministro de 115 V C.A. y línea neutra aislada 71 100 % -21 % +22 % -4 % -17 % -28 % Tabla 4.2: Diferentes arquitecturas de SPBDs transmisión. En los dispositivos que posean como salida o entrada corriente alterna tendrán factores correctores de potencia para reducir los armónicos que se produzcan [38] y [39]. También se presentan los pesos de estos convertidores, rectificadores e inversores para aplicaciones con potencias inferiores o superiores a 5 kW, además de concluir que pueden optimizarse más del 50 % en peso respecto a los tradicionales usando los niveles de +/- 270 V en C.C. Por último, una de las características principales de PBW es el desarrollo de actuadores compactos y accionados eléctricamente en lugar de los convencionales actuadores hidráulicos [40]. Los dos actuadores más utilizados en este tipo de tecnología son los actuadores electro-hidrostático (ElectroHydrostatic Actuator, EHA) y los actuadores electromecánicos (Electro-Mechanical Actuator, EMA). 4.3. Comparación entre actuadores de control de vuelo Con motivo del rápido desarrollo e introducción de la tecnología y electrónica de potencia en los aviones y, concretamente en el sistema de control de vuelo, se ha permitido el uso de actuadores eléctricos. Por un lado, se encuentra el actuador electro-hidrostático (Electro-Hydrostatic Actuator, EHA) cuyo esquema se muestra a continuación en la figura 4.3 junto a los tipos de transmisión y energías de alimentación utilizados. Se puede observar que estos actuadores son alimentados por la energía eléctrica proveniente del sistema eléctrico del avión. Esta energía es convertida en energía mecánica a través de la energía hidráulica que se obtiene de una 72 Capítulo 4. Comparación entre sistemas de accionamiento Figura 4.3: Componentes de un actuador electro-hidrostático (EHA). bomba instalada en el actuador. El servomotor es el encargado de accionar esta bomba, de velocidad variable bidireccional, que regula el flujo que entra en ambas cámaras donde se encuentra ubicado el pistón para la extracción y retracción del eje del actuador. La bomba varía su velocidad en función de las necesidades de potencia hidráulica demandadas por el piloto, de esta manera, se consigue un ahorro de energía eléctrica entregando ésta bajo demanda del piloto. Este tipo de actuadores se diseñan de manera compacta con un sistema hidráulico independiente. El aceite, usado como flujo hidráulico, absorbe el calor producido por el funcionamiento del actuador mediante convección, además de ser utilizado durante toda la vida útil del actuador, gracias a ello permite la construcción compacta del mismo. Proporcionan una alta precisión y transfiere grandes cantidades de energía para el movimiento. En contraposición, se encuentra el actuador electromecánico en la figura 4.4 cuyo esquema se presenta también a continuación para poder compararlo con el anterior actuador. En este caso, el eje del actuador electromecánico se extiende y se retrae gracias al uso de un servo motor alimentado eléctricamente en corriente continua, al igual que en el actuador electro-hidrostático. La diferencia reside en que, en el actuador electromecánico, existe una caja de engranajes que se encarga de transmitir y convertir la energía eléctrica del motor en energía mecánica al eje del actuador con forma de tornillo. En un primer momento, el actuador EMA era considerado demasiado lento y pesado para competir con los actuadores hidráulicos pero, con la llegada de la electrónica de potencia y la mejora de los motores hicieron que los actuadores EMA fueran más viables. El EMA posee una serie de ventajas frente al EHA. El actuador electromecánico es más pequeño y con un menor peso, Capítulo 4. Comparación entre sistemas de accionamiento 73 Figura 4.4: Componentes de un actuador electromecánico (EMA). ya que solo existe una conversión de energía (eléctrica-mecánica) frente a los dos del EHA (eléctrica-hidráulica-mecánica), con el EMA se evita la instalación de elementos del sistema hidráulico, como válvulas, depósitos de reserva o bombas hidráulicas, y la circulación de un fluido provocando la ausencia de fugas hidráulicas [41]. Todo ello también implica un fácil mantenimiento y una estructura compacta sin contaminación de fluido hidráulico. En contraposición, la principal razón por la que el EMA aún no ha sido implantado en el control de vuelo primario (únicamente para pruebas) es que la probabilidad de “jamming” o atasco en los actuadores electromecánicos actuales no es tan baja como se desea [40], con motivo de la presencia de engranajes y mecanismos de tornillos. Debido a que las superficies móviles primarias poseen ciclos de cargas de trabajo superior a las secundarias y al inconveniente del “jamming”, se eligen actuadores EHA para su uso. La probabilidad de bloqueo o agarrotamiento es extremadamente improbable en las tecnologías convencionales o en el actuador EHA [42]. El proyecto “More Open Electrical Technologies”, MOET se dedicó al estudio de este problema, para analizar profundamente el comportamiento en una EMA ya que los componentes de transmisión mecánicos ofrecen numerosos contactos entre partes metálicas. Entre las causas básicas de este inconveniente se identificaron las partículas de desgaste, falta de lubricante, imprecisiones geométricas, etc [42]. En algunos tipos de actuadores electromecánicos existe un canal de retorno que transporta las bolas de rodamiento en los circuitos dentro de la tuerca desde el extremo de un circuito a su principio. Un atasco en el canal de retorno, causada, por ejemplo, por la existencia de partículas de desgaste o por una bola deforme, bloquearía la circulación y provocaría que el tornillo de bolas (“ballscrew”) se comportara de manera similar a un actuador 74 Capítulo 4. Comparación entre sistemas de accionamiento “jackscrew” que posee un rendimiento mucho menor. Para afrontar este inconveniente, los modernos actuadores “ballscrew” suelen incorporar múltiples circuitos independientes, por lo que un atasco en una de ellas no sería catastrófico, pero provocaría un decremento en su rendimiento y de la vida útil restante del actuador [40]. Sin embargo, los sistemas de accionamiento electromecánicos, ya sean “ballscrew” o “jackscrew”, se consideran inaceptables para muchas aplicaciones debido a las condiciones de fallo en el que el sistema se pueden atascar en una posición fija que se traduce en una superficie de control atascada que puede provocar la pérdida de control del avión. Este problema es de gran importancia y ha sido objetivo de importantes investigaciones para encontrar una solución. En [43] se realiza una discusión acerca de la introducción progresiva del EMA frente al EHA y de la imposibilidad de utilizar el EMA para el control de superficies primarias debido al efecto del “jamming”, además se muestra una comparación de las ventajas e inconvenientes principales de los actuadores eléctricos, EMA y EHA. La incorporación del actuador electromecánico sería idóneo ya que reduce tanto la dimensión como el peso respecto del peso anterior, pero tiene el inconveniente de que necesitaría establecer sistemas de redundancia tanto en los motores como en la electrónica para aumentar su fiabilidad. Una solución a este problema se trata en [44], donde se muestra cómo es posible la introducción del motor de accionamiento directo frente a la eliminación del mecanismo de engranajes junto a las ventajas que presenta dicho cambio. Se realiza el diseño de un motor de magnetismo permanente con un número elevado de polos, el cual es simulado y probado frente a la tolerancia a fallos a circuito abierto y a cortocircuito. Por otro lado, en [45] se muestra la preocupación por los fallos inesperados o la falta de seguridad por parte de los actuadores EMA para ser usados en controles de vuelo primarios. Por ello, se pretende hacer uso de la transformada de ondículas discretas para detectar el fallo eléctrico y mecánico cuanto antes posible para así aumentar la fiabilidad del actuador electromecánico teniendo resultados satisfactorios. En el caso de los actuadores electro-hidrostáticos, EHA, existen otro tipo de inconvenientes como las no linealidades ocurridas en los mismos, como por ejemplo la fricción o la zona muerta de la válvula. Por ello, existe una gran cantidad de investigaciones acerca de diseños de EHA que superen estas adversidades en el funcionamiento. La fricción puede afectar de manera importante al rendimiento y la precisión de los actuadores electro-hidrostáticos. En [46], se caracteriza esta no linealidad como una variable de incertidumbre dentro de las matrices del sistema que pretende cubrir todo el comportamiento de fricción no lineal del Capítulo 4. Comparación entre sistemas de accionamiento 75 actuador EHA. Además, se pretende diseñar un control robusto de modo deslizante a tiempo discreto que permite proporcionar una gran precisión al actuador electro-hidrostático. En [21], se utilizan los conocimientos de control de planta mediante un control PID para contrarrestar los efectos de la fricción. Para ello, se realiza el modelo del motor en corriente continua, de la bomba hidráulica, del circuito de recirculación, del actuador, de la fricción existente, y por último, se conectan todos los modelos entre sí. Los resultados obtenidos garantizan la correcta compensación de los efectos de la fricción mediante un control PID. En [47], se realiza la misma modelización de [21] pero comparando esta vez diferentes maneras de controlar la planta: PID sencillo, PID en cascada o un control de realimentación. Siendo éste último el que proporciona una mejor respuesta de salida del sistema con la ayuda de un filtro. Existen también otras técnicas de control para contrarrestar las linealidades de los actuadores, en [48] se utiliza una técnica para linealizar el sistema, para posteriormente, implantar un control PID en el sistema, o en [49], que trata de realizar un control PID no lineal para contrarrestar la zona muerta de la bomba del sistema. Debido a la existencia, cada vez más, de elementos de diferente naturaleza que participan en la composición de los actuadores, la fiabilidad del conjunto disminuye considerablemente. Por ello, se hacen uso de sistemas de redundancia que se utilizan para mejorar la fiabilidad de los actuadores en cualquier fase de vuelo ante cualquier posible fallo que se pudiera presentar. En [50], se presenta el estudio de un sistema de redundancia tanto eléctrico como mecánico para un actuador electromecánico. Este sistema de redundancia consta de dos motores sin escobillas alimentados por cuatro circuitos eléctricos, que a su vez, son controlados por dos unidades de control. También se realiza un estudio donde se presentan los cálculos efectuados para obtener la fiabilidad de cada uno de los elementos del sistema de redundancia. Los resultados demuestran que los circuitos eléctricos que alimentan a los motores son los menos fiables, aunque realizando un sistema dual de redundancia en paralelo, esta fiabilidad aumenta considerablemente, proporcionando un aumento de la fiabilidad del conjunto. A continuación en las figuras 4.5 y 4.6 se muestran el esquema de redundancia comentado anteriormente y el estudio de probabilidades en diferentes situaciones, respectivamente. Estos sistemas de redundancia están en constante desarrollo, para conseguir aumentar estas probabilidades y conseguir que sean plenamente fiables. Otro estudio [51] realizado sobre los sistemas de redundancia consiste en dos canales automáticos y un tercero manual para alimentar al mecanismo de engranajes que moverá al actuador electromecánico. Ambos canales automá- 76 Capítulo 4. Comparación entre sistemas de accionamiento Figura 4.5: Esquema de un sistema de redundancia para un actuador EMA. Figura 4.6: Probabilidad de no fallo de diferentes configuraciones de redundancia. ticos serán los que tengan prioridad en cuanto al funcionamiento, en caso de que ambos canales automáticos fallen, entrará en acción el canal manual. Los resultados de este estudio demuestran que la fiabilidad aumenta considerablemente cuando se establecen 3 canales de redundancia. A pesar de los inconvenientes existentes en estos dos tipos de actuadores, el EMA y EHA han sido probados, ya sea en las superficies primarias o secundarias de vuelo, en una gran cantidad de aviones para comprobar su respuesta ante diferentes situaciones. Muestra de ello fue un estudio realizado por la NASA sobre el avión militar F-18 donde se realizaron pruebas para observar el comportamiento del avión frente a la implementación del actuador EHA o EMA en su alerón izquierdo. Uno de los primeros objetivos de la implementación del EHA en el avión militar F-18 [52], fue la demostración de funcionamiento de la tecnología PBW en las superficies primarias de control. Este actuador sustituía al actuador convencional hidromecánico proporcionando una mayor capacidad de Capítulo 4. Comparación entre sistemas de accionamiento 77 carga. El actuador EHA acumuló 23.5 horas de vuelo y superó todos los tests a excepción del test de apagado durante un ciclo dinámico sin carga. Por otro lado, años más tarde, se sustituyó el actuador hidromecánico por el actuador electromecánico para llevar a cabo pruebas y poder realizar comparaciones de comportamiento entre ambos [53]. Como resultados de ambos estudios, [52] y [53], se puede resaltar la diferencia de peso existente entre ambos actuadores para accionar las superficies móviles del avión militar F-18. De las 41,5 lb (aproximadamente 19 kg) del actuador EHA frente a las 26 lb (aproximadamente 12 kg) del actuador EMA, eso significa una reducción del 37 % en peso del actuador. A continuación, se presenta una tabla con las diferentes ventajas e inconvenientes de estos dos tipos de actuadores: Criterio Capacidad de carga Velocidad y aceleración Rendimiento Rigidez y Tolerancia a golpes Posicionamiento y control Mantenimiento Espacio requerido relativo Problemas medioambientales Tiempo de vida Vulnerabilidad fallo único Actuador EHA Muy alta Moderada 50 %-70 % Muy alta Actuador EMA Muy alta Muy alta >90 % Muy alta Difícil Fácil Alto Moderado Muy bajo Bajo Fugas hidráulicas Despreciables Proporcional al esfuerzo de mantenimiento Bajo Muy alto Bajo Tabla 4.3: Comparación de características de EHA y EMA En la actualidad, las constantes e insistentes investigaciones para conseguir que el actuador electromecánico sea usado en las superficies primarias de vuelo están dando sus frutos. La compañía Airbus con su modelo de avión A320 consiguió efectuar un vuelo de 2h 45 minutos con un actuador electromecánico en el alerón (superficie primaria de vuelo) en Junio de 2011. Este logro es consecuencia de estudios realizados en el programa COVADIS cuyo objetivo es la demostración del potencial y el desempeño de los actuadores 78 Capítulo 4. Comparación entre sistemas de accionamiento electromecánicos para el control de vuelo. Por último, en la figura 4.7 se muestra una imagen comparativa de las distintas configuraciones usadas para el control de superficies de vuelo en los aviones a lo largo del tiempo: Figura 4.7: Evolución del uso de actuadores en superficies de control de vuelo. 4.4. Sistema de no-sangrado Otra de las investigaciones importantes para la progresión hacia una avión más eléctrico fue el desarrollo de los sistemas de no-sangrado, “No-Bleed Air Systems”. Consiste en la sustitución del sistema de accionamiento neumático por el sistema de accionamiento eléctrico, incorporando en cada uno de los dos motores del avión, dos generadores eléctricos de frecuencia variable que proporcionan la energía que se obtendría del sangrado de los motores. La compañía Boeing es la única que ha implementado esta tecnología en su modelo de avión B787. Con la utilización de este sistema de no sangrado, existe una serie de sistemas que se ven afectados: Capítulo 4. Comparación entre sistemas de accionamiento 79 - Arranque del motor. - Unidad de potencia auxiliar (APU) de arranque. - Protección anti-hielo del ala. - Presurización de cabina. - Bombas hidráulicas. Quedando únicamente intacto el sistema de anti-hielo de entrada al motor que se sigue alimentando mediante el sistema neumático. Gracias al “No-Bleed Air Systems”, el avión B787 sufre una notable reducción de su peso al eliminar conductos, como por ejemplo, del compresor de la APU, válvulas, sistemas de control de aire, además de sistemas de detección de sobrecalentamiento y fugas, entre otros. El compresor de la APU se ve afectado en la medida en que su objetivo era impulsar una carga grande neumática pero al ser sustituido por generadores provoca un aumento de la fiabilidad y disponibilidad de energía. El uso de generadores de arranque reduce los requisitos de mantenimiento y aumenta la fiabilidad gracias a su simple diseño. En cuanto a la fiabilidad de arranque durante el vuelo, se espera que la APU del 787 sea aproximadamente cuatro veces más fiables que los convencionales APU de carga neumática. Otro ejemplo es el uso de de generadores de frecuencia variable que posee un tiempo entre fallos mean time between faults (MTBF) de 30.000 horas de vuelo, una mejora de la fiabilidad del 300 por ciento. Entre otras de las ventajas que se puede obtener de esta nueva tecnología son: - Mejora del consumo de combustible con una reducción alrededor del 3 %, debido a una extracción, transferencia y uso más eficiente de energía secundaria. - Reducción de los costes de mantenimiento, debido a la eliminación del sistema de mantenimiento intensivo de sangrado. - Mejora de la fiabilidad debido a la utilización de electrónica de potencia moderna y un menor número de componentes en la instalación del motor. - Mayor alcance y menor consumo de combustible debido al menor peso global del avión. 80 Capítulo 4. Comparación entre sistemas de accionamiento - Reducción de costes de mantenimiento y mayor fiabilidad debido a que la nueva arquitectura utiliza menos elementos que el sistema anterior. En los aviones tradicionales, el aire de alta velocidad y presión de los motores que es desviado por los sistemas neumáticos (sangrado), resta fuerza para sea usado en el empuje y aumentan el consumo de combustible del motor. En contraposición, la arquitectura del sistema de no-sangrado del B787 permite que los motores del avión produzcan empuje de manera más eficiente ya que todo el aire de alta velocidad producido por los motores va ser usado para su movimiento y las necesidades de los sistemas secundarios se obtienen de forma eléctrica a través de generadores movidos por un eje. Por ello, la eliminación del sistema de sangrado hace que el funcionamiento del motor sea más eficiente debido a la reducción de las necesidades de energía a nivel global avión, es decir, el avión no saca tanta potencia del motor en fase de crucero por lo que no se quema tanto combustible. Esta mejora permite predecir una mejora en el consumo de combustible en fase de crucero, entre 1 %-2 %. Por otra parte, el sistema de no sangrado permite una simplificación significativa en la construcción del motor debido a la eliminación del sistema neumático y de elementos como pre-enfriadores o pre-coolers asociados, válvulas de control, y conductos neumáticos requeridos. La figura 4.8 compara los dos tipos de motores, con y sin sangrado. Figura 4.8: Diferencias entre motores con y sin sistema de sangrado. El proyecto “Power Optimised Aircraft”, POA que empezó en Enero de 2002, tiene como objetivo identificar, optimizar y validar equipos innovadores del avión para la creación de un avión eficiente, es decir, introducir sistemas eléctricos para conseguir un avión con la configuración “More Electric Aircraft” para reducir consumo de energías secundarias o de no propulsión. Como resultado de los estudios realizados en este proyecto, usando valores de vuelo de crucero, se obtuvieron las siguientes conclusiones: Capítulo 4. Comparación entre sistemas de accionamiento 81 • 14 % menos de extracción debido a la electrificación de sistemas que eran alimentados mediante por bombas de la caja de cambios. • 7 % menos de energía utilizada por los sistemas de motores. • 14 % menos de energía requerida para el control del ambiente. Con lo que, en su conjunto corresponde a un total de 35 % menos de energía extraída de sistemas de equipo durante el crucero, con valores mucho más altos durante el ascenso y descenso. También se resalta el importante avance de reducción del 60 % en la potencia extraída para el sistema de deshielo en condiciones de hielo [35]. El sistema de extracción de energía de los motores para los diferentes sistemas del avión corresponde entre el 3 % - 5 % del total de energía producida por los motores (esta cifra varía en función de la fase de vuelo, motor o tipo de avión corresponda). En cambio para el modelo A320 neo de la compañía Airbus, se optó por un sistema de sangrado de aire tras concluir que la configuración sin sangrado no generaría ningún beneficio. Aun así, el sistema neumático incluye la nueva tecnología de accionamiento eléctrico en vez de usar válvulas neumáticas. Esto provoca una importante reducción en los costes de mantenimiento en un 70 %. A continuación, en la figura 4.9 se introduce un gráfico mostrando las mejoras conseguidas relativas a la extracción de energía con el uso de motores más eléctricos “More Electric Engine”. En ella se puede observa como, teniendo como referencia la fase del despegue para motores tradicionales, los motores más eléctricos extraen siempre menos energía en cada una de las diferentes fases del vuelo, no porque sean menos eficientes si no porque no necesitan extraer tanta cantidad de energía como en los motores tradicionales. La fase de vuelo donde se hace más latente esta gran ventaja es en la de crucero. 82 Capítulo 4. Comparación entre sistemas de accionamiento Figura 4.9: Diferencias en los niveles de extracción entre motores con y sin sistema de sangrado.