Seminario Clausuras - Departamento de Matemáticas
Anuncio

Mónica Ribero - 201126017
Rafael Mantilla - 201124446
Andrés Rodríguez - 201123795
Matías Ruíz - 201126728
Conferencista: Alf Onshuus NIño
Clausuras
Introducción
En este trabajo hablaremos, con intención de sintetizar el seminario del Dr. Onshuus sobre
clausuras a través de diferentes estructuras matemáticas. Pasando por clausuras
algebraicas, espacios vectoriales, grafos y conjuntos buscaremos llegar a una definición de
matroides, una estructura que nos permite generalizar la definición de clausuras. Haremos
énfasis en las demostraciones para las clausuras algebraicas y los espacios vectoriales. A la
vez las siguientes secciones tendrán un carácter más enunciativo. Se le recomienda al
lector que revise por su cuenta las demostraciones que falten.
Clausuras algebraicas:
Sea A un conjunto,
En particular si
, se define la clausura algebráica de A como
se define su clausura como
Se cumplen entonces las siguientes propiedades:
a)
b)
c) Si
d)
Demostración:
.
a) Sea
entonces existe
tal que
entonces
. Se
tiene entonces que
b) Demostración por doble inclusión:
Sea
entonces existen
tales que
. Entonces existe
tal que
entonces
.
Sea
entonces existen
tales que
. Pero a su vez para todo existen
tales
que
.
Entonces, al reemplazar,
Pero
clausura.
y
entonces
.
por definición de
Por principio de extensionalidad,
c) Sea
entonces existen
. Como
entonces
d)
entonces
y
tales que
y
como queríamos ver.
entonces
donde
,
,
, si contrario a lo afirmado
,
lo que contradice la hipótesis. En
particular,
entonces, al restar y a la
ecuación y multiplicar por
tenemos que
donde
y
entonces
como
queríamos ver.
1
Más aún, diremos que
es la clausura algebraica de un conjunto si todo polinomio
es de la forma
con
y
Se cumplen las mismas propiedades antes mencionadas y la demostración es análoga.
1
denota todos los polinomios con coeficientes en L
Espacios vectoriales:
Cabe resaltar que en esta presentación cuando se hable de escalares se refiere a
elementos en los reales.
Definición: Sea V un conjunto en el cual dos operaciones llamadas adición y
multiplicación por escalares, han sido definidas. Si u y v se encuentran en V, la suma
de u y v se denota por medio de u + v, y si c es un escalar, el múltiplo escalar de u por
c se denota como cu. Si los siguientes axiomas son válidos para todo u, v y w en V y
para todos los escalares c y d, entonces V se denomina espacio vectorial y sus
elementos son vectores.
I.
II.
III.
IV.
V.
VI.
VII.
VIII.
IX.
X.
Cerradura bajo la adición:
Si v,u V u + v V
Conmutatividad:
v+u=u+v
Asociatividad:
(u + v) + w = u + (v + w)
0 V, denominado vector cero o nulo, tal que u + 0 =u.
u V, -u V tal que u + (-u) = 0
Cerradura bajo la multiplicación por escalares:
Si v V cv V
Distributividad:
c(v + u) = cu + cv
Distributividad:
u(c + d) = uc + ud
Identidad:
1u = u
Asociatividad:
c(du) = (cd)u
Definición: Un subconjunto W de un espacio vectorial V se denomina subespacio de V
si W mismo es un espacio vectorial con los mismos escalares, adición y multiplicación
por escalares que V.
Teorema: Sea V un espacio vectorial, y W un subconjunto no vacío de V. Entonces W es
un subespacio de V si y sólo si se cumplen las siguientes condiciones:
a) Si u y v se encuentran en W, entonces u + v se encuentran en W.
b) Si u se encuentra en W y c es un escalar, entonces cu se encuentra en W.
Demostración:
: Supongamos que W es un subespacio de V. Entonces W satisface los axiomas de
espacio vectorial definidos anteriormente. En particular, el axioma I y el axioma VI.
: Supongamos que W es un subconjunto de un espacio vectorial V que satisface las
condiciones a) y b) lo que implica que los axiomas I, VI se cumplen. Como los vectores
de W se contienen en V los axiomas II, III, VII, VIII, IX y X también se cumplen. Falta
demostrar que los axiomas IV y V se cumplen:
Debido a que W es no vacío, contiene por lo menos un vector u. Por hipótesis, como 0
es un escalar, 0u =0 y 0 W y u + 0 = u, que es lo que afirma el axioma IV.
También como -1 se encuentra en los escalares por hipótesis se cumple que -1(u)= -u,
donde –u W. Pero u +(-u)=0, y esto es lo que afirma el axioma V.
Para mayor claridad demos unos ejemplos de espacios y subespacios vectoriales:
a) El conjunto de los polinomios con grado n es un espacio vectorial. Y el conjunto de
los polinomios de grado 2 es un subespacio del conjunto de los polinomios con
grado n.
b) K, el conjunto de todas las matrices simétricas de n × n, es un subespacio de H.
Donde H es el conjunto de todas las matrices n × m.
Definición: Si S = {v1, v2,… ,vn} es un conjunto de vectores subconjunto de un espacio
vectorial V, entonces el conjunto de todas las combinaciones lineales de v1, v2,… ,vn se
conoce como el espacio generado por v1, v2,… ,vn y se denota mediante la expresión
generado(v1, v2,… ,vn) o generado(S). Si V = generado(S) entonces S se denomina como
el conjunto generador para V y se dice que V es generado por S.
Teorema: Sean v1, v2,…,vn vectores en un espacio vectorial V.
a) Generado(v1, v2,…,vn) es un subespacio de V.
b) Generado(v1, v2,…,vn) es el subespacio más pequeño de V que contiene a v1,
v2,…,vn .
Demostración:
a) Por el teorema anteriormente demostrado sabemos que para que un conjunto sea
subespacio de V tiene que cumplir los axiomas I y VI:
Sea el generado(v1, v2,… ,vn) un subconjunto de V, tenemos que demostrar que si
w, u generado(v1, v2,… ,vn)
u + w generado(v1, v2,… ,vn). Sean u, w
generado(v1, v2,… ,vn), por definición de generado(v1, v2,… ,vn) u es de la forma u =
k1v1+ k2v2+… + knvn donde ki es un escalar, del mismo modo esto ocurre con w que
es de la forma w = c1v1+ c2v2+… + cnvn donde ci es un escalar. u + w = k1v1+ k2v2+… +
knvn + c1v1+ c2v2+… + cnvn = (c1 +k1 )v1+ (c2 +k2 )v2+… + (cn +kn )vn = m1v1+ m2v2+… +
mnvn donde mi es un escalar de la forma mi = ci +ki. Pero u + w es una combinación
lineal, entonces por definición de generado(v1, v2,… ,vn), u + w generado(v1,
v2,… ,vn).
Sea i un escalar, demostremos que Si u generado(v1, v2,… ,vn) iu generado(v1,
v2,… ,vn), sea u generado(v1, v2,… ,vn), por definición de generado(v1, v2,… ,vn)
entonces iu es de la forma iu = i(k1v1+ k2v2+… + knvn ) = ik1v1+ ik2v2+… + iknvn = l1v1+
l2v2+… + lnvn donde li es un escalar de la forma li = iki. . Pero iu es una combinación
lineal, entonces por definición de generado(v1, v2,… ,vn), iu generado(v1,
v2,… ,vn). Concluimos que generado(v1, v2,… ,vn) es un subespacio de V.
b) Para demostrar esta propiedad, debemos demostrar que para cualquier
subespacio W tal que v1, v2,… ,vn W, generado(v1, v2,… ,vn) está contenido en W.
Dado que W está cerrado bajo la adición y la multiplicación sabemos que toda
combinación lineal de v1, v2,… ,vn está en W, por lo tanto generado(v1, v2,… ,vn)
está contenido en W.
Teorema: Sea V un espacio vectorial, y sean W = { v1, v2,… ,vn }, K = { v1, v2,… ,vk }
subconjuntos de vectores de V. Demostrar:
a)
b)
c)
d)
W generado(W).
generado(W) = generado(generado(W)).
W subconjunto de K generado(W) generado(K).
Si v generado(W {u}) y v generado(W) u generado(W
{v})
Demostración:
a) Sea v1 W, dicho vector podemos expresarlo de la forma v1 = (1)v1+ 0v2+… + 0vn,
esto significa que v1 es una combinación lineal de los elementos de W con
escalares de la forma k1=1, k1+i= 0, donde i {1,…, n-1 | n a los naturales}. Como
v1 es una combinación lineal de los elementos de W por definición de generado(W)
v1 generado(W). Concluimos que W es subconjunto de generado de W.
b) Demostremos por doble inclusión esta igualdad:
Generado(W) subconjunto de generado(generado(W)): Por la parte a) de
este teorema se cumple.
Generado(generado(W)) subconjunto de generado(W):
Sea w1
generado(generado(W)) , por definición w1, w1 es una combinación lineal
de las combinaciones lineales de W. Entonces w1 es de la forma w1 = k1k1+
k2k2+… + knkn donde ki es una combinación lineal de elementos de W. Pero
ki = l1v1+ l2v2+… + lnvn donde li es un escalar, entonces tenemos que w1 =
k1k1+ k2k2+… + knkn = k1(l1v1+ l2v2+… + lnvn)+ k2(h1v1+ h2v2+… +hnvn)+… +
kn(z1v1+ z2v2+… + znvn) = k1l1v1+ k1l2v2+… + k1lnvn+ k2h1v1+ k2h2v2+… +
k2hnvn+… + knz1v1+ knz2v2+… + knznvn = ( k2h1 + k1l1 + knz1)v1+(k1l2 + k2h2 +
knz2)v2+… + (k1ln + knzn + k2hn)vn = a1v1+ a2v2+… + anvn donde hi,zi,ai son
escalares y ai es de la forma ai = k2hi + k1li + knzi . Podemos ver que w es una
combinación lineal de los elementos de W entonces por definición de
generado(W) w1 generado(W). Concluimos que Generado(generado(W))
subconjunto de (W).\
Concluimos que generado(W) = generado(generado(W)).
c) W subconjunto de K generado(W) subconjunto de generado(K):
Supongamos W subconjunto de K, sea x
generado(W) entonces por
definición de generado(W) x es de la forma x = l1v1+ l2v2+… + lnvn donde li es
un escalar. Pero para todo vi que pertenece a W vi pertenece a K por
hipótesis, entonces tenemos que x es una combinación lineal de elementos
de K, esto implica por definición de generado(K) que x
generado(K).
Concluimos que generado(W) es subconjunto de generado(K).
d) En el caso en que v generado(W {u}) sea de la forma v = l1v1+ l2v2+… + lnvn +
ln+1u donde li es un escalar, si ln+1 = 0 se contradice la hipótesis. En particular para
ln+1 = 1, tenemos w = l1v1+ l2v2+… + lnvn + u que podemos reescribirlo como –u = -w
+ l1v1+ l2v2+… + lnvn y al multiplicarlo por -1 obtenemos u = w + h1v1+ h2v2+… +hnvn
donde hi es un escalar de la forma hi= -li . Podemos ver que por definición de
generado(W {w}), u generado(W {w}) como queríamos demostrar.
Definición: Un conjunto de vectores{ v1, v2,… ,vk } de un espacio vectorial V es
linealmente dependiente si existen escalares ci ,donde 1≤ i ≤ k, al menos uno de los
cuales no es 0 tal que:
c1v1+ c2v2+… + cnvk = 0
Un conjunto de vectores que no es linealmente dependiente se dice que es linealmente
independiente.
Definición alterna: Un conjunto de vectores{ v1, v2,… ,vk } de un espacio vectorial V es
linealmente independiente si y sólo si ninguno de los vectores puede ser expresado
como una combinación lineal de los otros.
Definición: Un subconjunto B de un espacio vectorial V es una base para V si:
generado(B) = V.
B es linealmente independiente.
Teorema: Ninguna base es subconjunto propio de otra base
Teorema: Para todo x
B1 existe un y
B2 | (B1 \ {x} )
{y} es una base.
Demostración: Estas dos demostraciones se le dejan como ejercicio para el lector. Pero
con ellas podemos demostrar el siguiente teorema.
Teorema: Todas las bases tienen la misma cantidad de elementos
Definición: Dado un conjunto A subconjunto de un espacio vectorial V, se dice que la
dimensión de A (denotada como dim(A)) es el mínimo número de vectores de A tal que
su generado es igual a generado(A) La dimensión del espacio vectorial vacío, se define
como cero.
Teorema:
Teorema:
Definición: Definimos la clausura de A un subconjunto de V
Teorema: Se tiene que para A subonjunto de V
Se le deja como ejercicio la demostración de este teorema que luego va a ser
fundamental para establecer un espacio como un matroide
Propiedades de grafos:
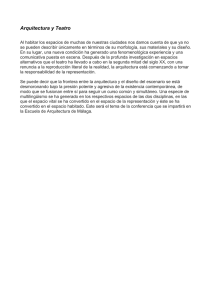
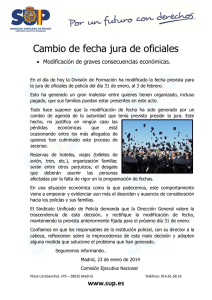
Empecemos con la definición de un grafo (para éste trabajo hablaremos de grafos finitos).
Un grafo se define por un conjunto no vacío de vértices
y una familia
de
2
parejas no ordenadas de elementos de
llamada arcos. La Figura 1 ilustra un grafo
donde
.
y
3
pertenecen a
Figura 1-Generado con Wolfram Mathematica
El arco
arcos de
Un grafo
es conocido como bucle Un camino es una secuencia finita de diferentes
:
es conexo si
hay un camino entre
y . Un grafo
es
un subgrafo de G si
y
. Un grafo no conexo se puede partir
en una cantidad finita de grafos conexos (nótese que en el peor caso cada vértice sin
ningún arco es conexo), si además se cumple que para cada una de esas particiones no
existe ningún arco que una a un vértice que sea parte de esa partición a uno que no, cada
partición se conoce como componente conexa (en el ejemplo anterior
y
son componentes conexas). Un ciclo es un camino distinto de arcos que empiezan y
terminan en un mismo vértice (en el ejemplo anterior
forman
un ciclo que empieza y termina en ).
2
Esto es válido para grafos no dirigidos, en grafos dirigidos los arcos son representados por duplas
ordenadas.
3
Nótese que también se puede expresar como
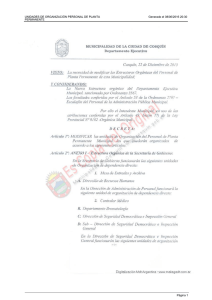
Un grafo conexo que no contiene ciclos se le conoce como un árbol4. Así mismo dado un
grafo conexo se dice que un subgrafo es un árbol de expansión si
yH
es un árbol (Ver Fig. 2). Así mismo, un grafo en donde sus componentes conexas sean
árboles se conocerá como un bosque. Y para un grafo se dice que un subgrafo es un
bosque de expansión si
y H es un bosque.
Figura 2- A la derecha un árbol de expansión del grafo conexo de la izquierda 5
Podemos fácilmente demostrar dos propiedades interesantes sobre bosques de
expansión:
Dado un grafo , y dos bosques de expansión de
si es un subgrafo de
entonces
. Es decir ningún bosque de expansión es un subgrafo propio
de otro bosque de expansión.
Dados dos bosques de expansión de
tal que
es un bosque de expansión. Es decir siempre podemos “reemplazar”
un arco.
De estas dos propiedades deducimos una tercera
Todo bosque de expansión tiene la misma cantidad de arcos.
Sabiendo eso para cada grafo podemos establecer una función
que nos dirá el
tamaño de cualquier bosque de expansión para un grafo . Esta función también tiene 3
propiedades interesantes:
1. Para cualquier subgrafo
2. Si es un subgrafo de
4
de
,
.
El nombre viene de la idea que uno puede seleccionar una “raíz” y ver cómo se “ramifica” el árbol desde ahí.
Dos propiedades interesantes de los árboles son:
1. Para cualquier par de vértices distintos
existe un camino único entre los dos vértices.
2.
es decir la cantidad de arcos va a ser la cantidad de vértices menos 1.
5
Sacado de http://www.ecst.csuchico.edu/~sim/547/img/278/Note9/SpannigDiag.jpg
3. Para cualquier par de subgrafos de
.
,
y
Por último definimos la clausura de un subgrafo de ,
de la siguiente forma:
Notamos otras tres propiedades interesantes de esa función:
1. Para cada subgrafo
2. Si
de
se cumple que
es un subgrafo de subgrafo de
.
es un subgrafo de
se cumple que
3. Si
la condición de intercambio.
y
es un subgrafo de
, esta propiedad se conoce como
Teoría transversal:
Sea un conjunto finito y
donde es un subconjunto no vacío de .
Llamamos a un transversal de como un conjunto de
elementos distintos, cada uno
escogido de cada uno de los subconjunto . Así mismo se conoce como transversal
parcial a un conjunto que es un transversal de algún subconjunto de . Por ejemplo para
,
el conjunto no tiene transversal, sin embargo tiene muchos
transversales parciales (
son transversales parciales).
El teorema de matrimonio de Hall dice que
tiene un transversal sí y sólo sí
También definimos a un transversal parcial maximal de como un transversal parcial de
el cual no es un subconjunto propio de algún otro transversal parcial. En el ejemplo
anterior los dos transversales parciales maximales son
.
Inmediatamente por definición sabemos que ningún transversal parcial maximal es un
subconjunto propio de otro. Así mismo:
Sean dos transversales parciales maximales
es un transversal parcial maximal.
tal que
De lo que podemos concluir que todo transversal parcial maximal tiene la misma cantidad
de elementos. Por lo que para cualquier subconjunto A de podemos definir una función
como el tamaño de cualquier transversal parcial maximal de A. Nótese tres
propiedades interesantes de .
1. Para cualquier
2. Si
,
3. Dados
,
Así mismo para
,
.
.
podemos definir la clausura de A de la siguiente forma:
Aquí también podemos enunciar tres propiedades interesantes:
1.
2.
3. Si
Propiedades de Matroides:
Con base en todas las categorías anteriores vamos a mostrar varias formas de definir un
matroide, como generalización de todas las propiedades anteriores.
Primera Definicion:
Una matroide G = (E,L) es un conjunto finito no vacio que contiene subconjuntos L
llamadas bases que cumplen las siguientes propiedades:
1. Ninguna base contiene otra base.
2. Si B1 y B2 son bases, y c pertenece a B1 existe un y que pertenece a B2 tal que (B1
– {c}) {y} también es una base.
Esto nos permite demostrar que cualquier par de bases va a tener el mismo número de
elementos. Nótese que esto es una clara analogía con una base en espacios vectoriales, un
bosque de expansión en grafos y un transversal parcial maximal en teoría transversal.
Todos ellos son bases de un matroide.
Segunda Definición:
Si se tiene un matroide G = (E,P) y A es un subconjunto de E la relación P(A) se va llamar la
función de rango, la cual da el número de elementos que tiene cualquier base de A. Dicha
función va a estar definida para todo subconjunto de E y va a cumplir las siguientes
propiedades:
1. Para cada subconjunto F de E 0 P(F) |F|.
2. Si T F E entonces P(T) P(F).
3. Para cualquier S, Z E P(S Z) + P(S Z) P(A) + P(B).
Esta definición es similar a las propiedades que ya habíamos mencionados de espacios
vectoriales, con la función de dimensión y la otras funciones de rango en grafos y teoría
transversal. Lo que finalmente nos permite llegar a nuestra última definición, la que se
basa en la operación de clausura que se define de la siguiente forma para A, un
subconjunto de E
Tercera Definición:
Una matroide G = (E,cl) es un conjunto no vacio con una función cl: F(E) F(E) tal que
sigue las siguientes propiedades:
1.
2.
3. Si
Con estas tres definiciones vemos cómo generalizar todo lo que hemos visto hasta ahora.
Bibliografía:
Wilson R.J.(1973). An Introduction to Matroid Theory. The American Mathematical
Monthly, Vol. 80, No. 5. (May, 1973), pp. 500-525. <En línea> [Disponible en:
http://www.math.washington.edu/~billey/classes/582/bulletins/wilson.matroids.p
df]. <Recuperado 7/11/2011>
Castillo C.I Álgebra <En línea> [Disponible en:
http://www.uv.es/ivorra/Libros/Algebra.pdf] <Recuperado 14/11/2011>
Forero A. (2011). Matemática Estructural. Departamento de Matemáticas,
Universidad de los Andes. Bogotá, Colombia: Ediciones Uniandes.
Poole, D. (2007). Álgebra lineal, Una introducción moderna. Santa Fe, México:
Cengage Learning