Document
Anuncio

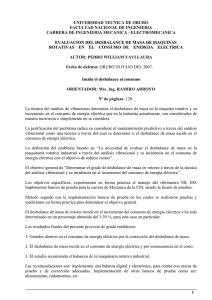
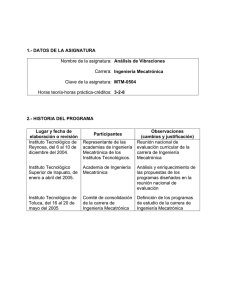
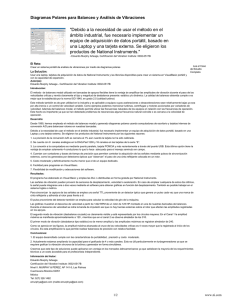
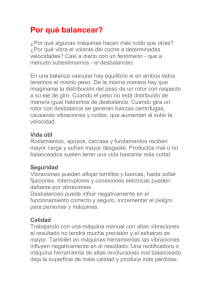
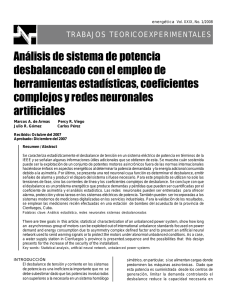
Laboratorio de Vibraciones Mecánicas Practica 5 Nombre:_____________________________________ Matricula:_______________ Grupo de Lab.:___________ PRÁCTICA 5 BALANCEO DINÁMICO Examen Rapido Cálculos y dibujos Resultados Conclusiones Investigaciones Comentarios y Observaciones CALIFICACIÓN TOTAL 20 10 15 30 15 10 100 OBJETIVO El alumno comprenderá y analizará el balanceo dinámico de un sistema en un plano y en dos planos. FUNDAMENTOS Una de las causas más comunes de vibración en maquinaria es el desbalance de piezas rotativas. El desbalance se produce cuando el centro de gravedad de una pieza no coincide con su eje de rotación, produciendo por lo tanto, fuerzas y/o momentos que hacen vibrar la maquinaria. El desbalance puede ser producido por: • Falta de simetría en las partes rotativas de las máquinas, debidas a la fundición, forjado y maquinado. • Falta de homogeneidad causada por soldaduras. • Variaciones en la estructura química y cristalina del material, causadas por el vaciado o tratamiento térmico. • Variaciones en el tamaño de tornillos, tuercas, y otros sujetadores. Los problemas más comunes causados por la vibración debida al desbalance son: • Excesivo desgaste en los puntos de apoyo o chumaceras. • Ruidos adicionales en la operación de equipos. • Desajuste de tornillos, tuercas, etc. • Fallas por fatiga en elementos de la estructura en vibración. BALANCEO Existen dos tipos de balanceo: 1. Balanceo estático o en un plano. 2. Balanceo dinámico o en dos planos. BALANCEO ESTÁTICO Considere un elemento con forma de un disco circular delgado. Cuando el centro de masa es diferente al eje de rotación, se dice que el elemento está estáticamente desbalanceado. 1 Laboratorio de Vibraciones Mecánicas Practica 5 Prueba y error Para llevar a cabo el balanceo se coloca la flecha del rotor sobre unos rieles como se muestra en la Figura 1(a). Se rota el disco y se le deja detenerse por sí solo. Se marca sobre el disco con un gis en la parte inferior de la circunferencia. Se repite el proceso varias veces, cada vez marcando en la parte inferior. Si el disco está balanceado, las marcas de gis se verán aleatoriamente dispersadas por la circunferencia. Ahora, si las marcas coinciden significa que el disco está desbalanceado. El desbalance detectado de esta forma es conocido como desbalance estático. El desbalance estático puede corregirse removiendo material donde aparece la marca de gis, o agregando peso a 180° de la marca de gis. Debido a que la magnitud del desbalance es desconocido, la cantidad de material a agregar o remover se determina mediante prueba y error. Figura 1. Este procedimiento es llamado "balanceo en un plano" debido a que toda la masa se encuentra prácticamente en un plano. La cantidad de desbalance puede encontrarse haciendo rotar al disco a una velocidad angular ω conocida, y midiendo las reacciones en ambos apoyos (ver Fig. 1b). Si una masa desbalanceada m esta colocada a un radio r del disco, la fuerza centrífuga será igual a mrω2. Entonces las reacciones en los apoyos serán: F1 = a2 mrω2 , l F2 = a1 mrω2 l Figura 2. Analizador de vibraciones En este caso, el disco se conecta a un eje con un apoyo A e impulsado por un motor eléctrico que gira a una velocidad angular ω, como se observa en la Fig. 2. Antes de empezar el balanceo, se colocan unas marcas de referencia tanto en el disco como en un marco fijo, ver Fig. 3(a). Se coloca un captador de vibraciones en el apoyo, ver 2 Laboratorio de Vibraciones Mecánicas Practica 5 Fig. 2, y el analizador de vibraciones se ajusta a la frecuencia correspondiente a la velocidad angular del disco. La amplitud producida por el desbalance, Au , se obtiene del analizador. Se dispara una luz estroboscópica a la misma frecuencia del disco, y la marca en el disco permanecerá fija a un ángulo θ de la del marco fijo, ver Fig. 3(b). Se detiene el disco y se coloca una masa de prueba W de acuerdo a la Fig. 3(b). Al girar el disco a una velocidad ω, se observa una nueva posición de la marca con respecto al marco fijo, φ , y una nueva amplitud Au+w , causada por la combinación del desbalance del disco y de la masa de prueba, ver Fig. 3(c). Figura 3. Se construye un diagrama de vectores para encontrar la magnitud y la ubicación de la masa de corrección. El desbalance original Au se dibuja en una dirección arbitraria, con una longitud igual a Au , como se muestra en la Figura 4. Figura 4. El vector de ambos desbalances, Au+w se dibuja a un ángulo φ - θ a partir de la dirección de Au , con una magnitud de Au+w . El vector resultante Aw = Au+w - Au , representa el vector de desbalance debido a la masa de prueba. La magnitud Aw se obtiene a partir de la ley de los cosenos: Aw = [A2u + A2u+w - 2Au Au+w cos (φ - θ)]1/2.............................................................................Ec. 1 Debido a que la magnitud de la masa de prueba W y su dirección relativa al desbalance original son conocidas, el desbalance original se encuentra a un ángulo α de la posición de la masa de prueba, como se observa en la Fig. 3(d). El ángulo α se obtiene también de la ley de los cosenos: 3 Laboratorio de Vibraciones Mecánicas Practica 5 A2 + A2 − A2 u w u+ w ............................................................Ec. 2 α = cos −1 2 A A u w La magnitud del desbalance original será entonces: Wo = (Au / Aw ) W ................................................................Ec. 3 Localizado a la misma distancia radial del eje de rotación del disco que el peso W. Una vez que se ha localizado y conocido la magnitud del desbalance original, se agrega la masa de corrección adecuadamente. BALANCEO DINÁMICO Supongamos que tenemos un rotor como el que se muestra en la Fig. 5, donde el desbalance puede estar en cualquier parte a lo largo del rotor. Figura 5. En este caso, el rotor puede balancearse agregando masas de corrección en dos planos cualesquiera. Por conveniencia se escogen los planos en las caras del rotor (mostrados por las líneas punteadas). En la figura 6, el desbalance total en el rotor se reemplaza por dos masas de desbalance UL y UR para el plano derecho e izquierdo respectivamente. Figura 6. A una velocidad de operación ω, la amplitud de vibración y su correspondiente fase debidas al desbalance original, se miden en ambos apoyos A y B, y los resultados son dos vectores VA y VB. La magnitud del vector de vibración es la amplitud de vibración, y la dirección del vector se toma como el negativo del ángulo de fase observado mediante la lámpara estroboscópica, tomando como referencia la marca en un marco fijo. Los vectores medidos VA y VB pueden expresarse como: VA = AALUL + AARUR Ec. 4 4 Laboratorio de Vibraciones Mecánicas Practica 5 VB =ABLUL + ABRUR Ec. 5 donde Aij es un vector que refleja el desbalance en el plano j (j= L, R) en el apoyo y (i=A,B). Note que UL, UR, y todos los vectores Aij son desconocidos. Al igual que en el caso de balanceo en un plano, se agregan masas conocidas para luego tomar mediciones y obtener información de las masas desconocidas. Primero, agregamos una masa conocida WL en el plano izquierdo en una posición angular conocida y medimos el desplazamiento y la fase de vibración en ambos apoyos, cuando el rotor se encuentre operando a una velocidad ω. Estas mediciones se consideran como vectores, tales que: V'A = AAL (UL + WL) + AARUR Ec. 6 V'B =ABL (UL + WL) + ABRUR Ec. 7 Restando las ecuaciones (4) y (5) a las ecuaciones (6) y (7), respectivamente, obtenemos: AAL = (V'A - VA) / WL Ec. 8 ABL = (V'B - VB) / WL Ec. 9 Luego retiramos WL y colocamos otra masa conocida WR en el plano derecho a una posición angular conocida. Tomamos nuevamente las mediciones representadas como vectores: V''A = AAR (UR + WR) + AALUL 10 V''B =ABR (UR + WR) + ABLUL Ec. 11 Restando las ecuaciones (4) y (5) a las ecuaciones (10) y (11) respectivamente, obtenemos: AAR = (V''A - VA) / WR Ec. 12 ABR = (V''B - VB) / WR Ec. 13 Una vez que los vectores Aij son conocidos, las ecuaciones (4) y (5) se solucionan para obtener los vectores de desbalance UL y UR : UL = [ABR VA - AARVB] / [ ABR AAL - AAR ABL] Ec. 14 UR = [ABL VA - AALVB] / [ ABL AAR - AAL ABR] Ec. 15 UL UR Left plane L R Right plane 5 Laboratorio de Vibraciones Mecánicas Practica 5 Figura 7 El rotor ahora puede balancearse agregando masas iguales y opuestas en cada plano. Las masas de corrección en los planos derecho e izquierdo se denotan vectorialmente como BL = -UL y BR = -UR. MATERIAL Y EQUIPO - Rotor - Captador de vibración - Analizador de vibraciones - Plastilina - Desarmador PROCEDIMIENTO 1. Balancear dinámicamente la propela, siguiendo el método de balanceo en un plano. 2. Balancear dinámicamente el rotor, siguiendo el método de balanceo en dos planos. INVESTIGACION Investigue metodos de balanceo dinámico. BIBLIOGRAFÍA Mechanical Vibrations, Singiresu S. Rao Addison-Wesley, Segunda Edición, 1990 Capítulos 1, 2 6