teoria puntas y mediciones
Anuncio

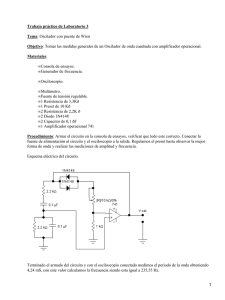
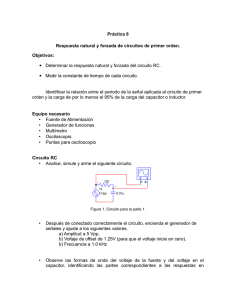
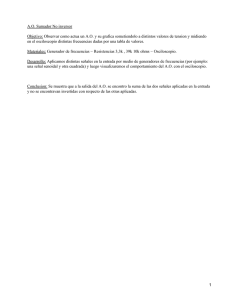
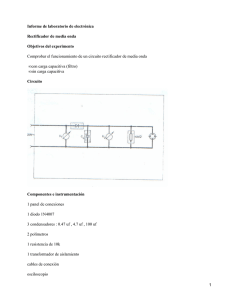
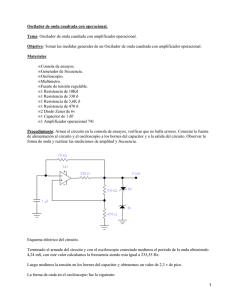
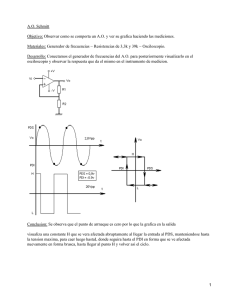
Trabajo Práctico N° 5 Alta Frecuencia: Tiempo de crecimiento y puntas de osciloscopio 1) Objetivos Nos proponemos que el estudiante adquiera las destrezas necesarias para aplicar los distintos métodos de medición del tiempo de crecimiento, internalice las diferencias en la exactitud de esos métodos e interprete las modificaciones introducidas en la medición por la utilización de puntas directas y atenuadas. 2) Introducción teórica Sabemos que cuando se aplica una tensión a un circuito R-C, la carga del capacitor demandará cierto tiempo. Por lo tanto si la fuente del circuito genera un tren de pulsos, la foram de onda de la tensión sobre el capacitor, también será un tren de pulsos pero con cierto retardo. Este retraso en el crecimiento de la tensión sobre el capacitor puede ponerse de manifiesto mediante un parámetro llamado tiempo de crecimiento (rise time), al que simbolizaremos como “tr”. Definimos el tiempo de crecimiento como el tiempo que el pulso emplea para pasar del 10% al 90% de su valor máximo (techo del pulso). Es decir tr = t 90% − t 10% Por supuesto, tr dependerá de la constante de tiempo τ del circuito. La relación entre ambos valores la podemos obtener del siguiente modo: la expreción para la carga de un capacitor −t ⎞ ⎛ es vc = E ⎜⎜ 1 − e τ ⎟⎟ y si tomamos tensiones par el 10 y el 90% del valor máximo, resulta ⎠ ⎝ t 10 − ⎞ ⎛ ⎜ vc( t 10%) = 0.1 E = E ⎜ 1 − e τ ⎟⎟ , pudiendo ahora despejar el valor del tiempo ⎠ ⎝ correspondiente, es decir t 10% = −τ ln 0.9 . Operando del mismo modo obtenemos t 90% = −τ ln 0.1 Finalmente si realizamos la diferencia entre ambos valores queda 1 t 90% − t10% = −τ ln ≅ 2.2τ . Resumiendo, podemos determinar le tiempo de crecimiento 9 de un circuito R-C mediante la expresión tr = 2.2τ 3) Métodos de medición del tiempo de crecimiento. Para medir el tiempo de crecimiento, podemos usar varios métodos, todos similares y aprovechando distintas capacidades del osciloscopio. 3.1) Con la base de tiempo principal Deberemos realizar los siguientes pasos. a) Ubicamos el tren de pulsos entre las líneas del a y 100% de la gratícula, para lo cual usamos el canal vertical descalibrado. b) Contamos el número de divisiones que hay entre los puntos de corte del flanco ascendente de uno de los pulsos con las líneas del 10 y 90%. c) Multiplicamos el número de divisiones leídas por el coeficiente del barrido de la base de tiempo principal. tr = N × BTA c)Cálculo de la incerteza. La obtenemos mediante los datos del instrumento utilizado y quedará definida así, incerteza en tr = apreciación+alinealidad de la BTA+ exactitud de la BTA 3.2) Con la base de tiempo demorada. Deberemos realizar los siguientes pasos. a) Ubicamos el tren de pulsos entre las líneas del a y 100% de la gratícula, para lo cual usamos el canal vertical descalibrado. b)Aplicamos el control A INT B que permite visualizar intensificado (con mayor brillo) la parte en la cual se dispara la base de tiempo demorada y ajustamos el potenciómetro multiplicador de retado hasta visuaizar intensificado el flanco de nuestro interés. c) Pasamos a la visualización según la base de tiempo demorada, es decir a BTB y leemos el número de divisiones entre las intersecciones del flanco con las líneas del 10 y 90%. d) Determinamos el tiempo con la expresión tr = N × BTB e) Determinamos la incerteza de la medición del modo conocido incerteza en tr = apreciación+alinealidad de la BTB+ exactitud de la BTB 3.3) Base de tiempo principal magnificada. En algunas ocasiones cuando el tr es muy pequeño, puede ser necesario el uso del magnificador. Los pasos a seguir son los mismos que para el método 3.1), pero con la salvedad que hay que habilitar el control MAG × 10 . N × BTA El valor del tiempo de crecimiento lo obtenemos tr = 10 Finalmente, la incerteza de la medición será semejante a las anteriores, pero hay que tener en cuenta que magnificar implica usar un amplificador en cascada adicional, el cual introducirá una nueva alinealidad. incerteza en tr = apreciación+alinealidad de la BTB+ exactitud de la BTB+alinealidad magnificador. Nota: En todos los casos, la incerteza debida a la apreciación la podemos obtener 0.1 como ξap = por lo que queda claro que es mejor medir más divisions. Los demás N valores deben obtenerse de las hojas de datos de osciloscopio usado. Analizando un poco más en detalle, debemos observar dos cuestione, una es que aumenta la incerteza de la medición debida al osciloscopio, por lo que habrá que considerar si se justifica este aumento a cambio de una reducción en la incerteza de apreciación. Segundo, en general, los generadores no son absolutamente estables, de manera que cuando hacemos un elevado “zoom” comenzarán a observarse imperfecciones, una de ellas es la agitación o” jitter”. Esto producirá dificultades para medir tr. El problema puede reducirse usando la base de tiempo demorada en modo disparado”trig” 4) Puntas de osciloscopio Trataremos de analizar el comportamiento de las puntas directas y atenuadas × 10 . En esencia la punta directa, no es otra cosa que un cable coaxial, es decir una línea de transmisión que puede ser modelada mediante un circuito de constantes distribuidas, de manera que tendrá una inductancia, capacitancia, resistencia y conductancia por unidad de longitud. Todos estos elementos de circuitos influirán en la medición a realizar. También el osciloscopio presentará una impedancia de entrada constituida por una resistencia (del orden de 1MΩ y una capacitancia en paralelo de algunos pF ( alrededor de 25pF). En consecuencia debemos hablar del conjunto punta-osciloscopio, el cual presentará un modelo equivalente que lo podemos dibujar como sigue, para el caso de un osciloscopio común, aunque los valores consignados, pueden diferir en algo de uno a otro. Cabe aclarar que, como expresamos anteriormente habrá también una capacitancia del cable que estará en paralelo con la de la entrada del osciloscopio, de manera que podremos sumarlas. Esa capacitancia depende del cable y es de algunas decenas de pF (40-80). Si observamos un poco el circuito, queda claro que su transferencia, es decir la relación entre la tensión sobre el osciloscopio y la de entrada a la punta está muy cercana a uno para la continua. Rg 1 25 V1 R1 2 1 T1 2 200 R2 1Meg C2 25pF 0 2 2 COAX 0 0 1 0 Sin embargo, a medida que la frecuencia sube, comienza a tener importancia la capacitancia, ya que su reactancia baja en relación inversa a la frecuencia, de manera que tenderá a bajar la impedancia del paralelo R-C. Consecuentemente se reducirá la transferencia y la tensión sobre el osciloscopio (la que estamos midiendo), también se reduce, de forma tal que si graficamos tensión sobre el osciloscopio en función de la frecuencia, tendremos una curva como la siguiente. 1 0 Se observa que a medida que la frecuencia aumenta, la tensión sobre el osciloscopio se reduce hasta llegar a la frecuencia de corte que se la define por la caída de 3dB (decibeles) respecto del valor máximo. Esa caída equivale, en forma lineal al 70.7% del valor máximo. La frecuencia de corte define el ancho de banda de operación del sistema. En general para un osciloscopio de 50MHz de ancho de banda, el ancho de banda cuando se usa la punta descripta anteriormente, se reduce mucho, dando un ancho de banda del conjunto de alrededor de los 6 ó 7MHz, con lo cual el osciloscopio es “desperdiciado” en ese aspecto. Debe quedar bien claro que el ancho de banda efectivo es una propiedad del puntaosciloscopio. A continuación vemos la curva real de respuesta en frecuencia de una punta directa con un osciloscopio convencional. 1.00V 0.96V 0.92V 0.88V 1.0Hz 10Hz 100Hz 1.0KHz 10KHz 100KHz 1.0MHz 10MHz 100MHz V(Rg:2) Frequency Para “aprovechar” el ancho de banda propio del osciloscopio, se recurre a la punta atenuada, con atenuaciones varias, siendo la más común (por 10) Analizaremos pues en detalle el circuito de esa punta en la cual se requiere una resistencia serie de 9MΩ para lograr el divisor de tensión por 10 y también un capacitor en paralelo para lograr compensar el atenuador. Por lo tanto el modelo equivalente será el siguiente: 1 R3 2 1 25 Vg 1 Cp 2 11.11111pF 2 2 9Meg 2 Rp Cos 100pF 1Meg 0 Ros 1 0 1 0 Por supuesto, la punta tiene un elemento de ajuste que es un capacitor variable que aparece sobre el cuerpo de la punta o sobre el conector BNC que va al osciloscopio y que se calibra mediante un tornillo con un destornillador plástico que habitualmente viene con la punta. Podemos demostrar que si las constantes de tiempo del circuito R-C sobre el osciloscopio (Ros, Cos) y sobre la punta (Rp, Cp) son iguales, la transferencia del circuito equivalente es constante con la frecuencia e igual a 0.1 para el caso de la punta por 10. Lo anterior puede vaerse del siguiente modo: V2 , la transferencia del circuito, puede obtenerse como el divisor de tensión formado V1 por Rp, Cp y Ros, Cos. Procedamos al análisis 1 Ros 1 + jωC 0 s 1 + jωC 0 s Ros = pero, recordando que admitimos que T= 1 1 Rp Ros + + 1 1 + jωCp + jωCos 1 + jωCp 1 + jωCp Rp Ros la punta está compensada, deberá cumplirse, como vimos RpCp = RosCos = τ entonces Ros Ros 1 + jωτ . Queda claro que el reemplazando queda T = = Rp Ros R p + Ros + 1 + jωτ 1 + jωτ comportamiento del divisor es enteramente resistivo y el valor de la transferencia no 1M 1 = cambia con la frecuencia., siendo para nuestro circuito T = . Para confirmar 1M + 9M 10 la validez de la teoría adjuntamos la simulación con el ORCAD-SPICE T= 110m 80m 0000,100.000m) 40m 0 1.0Hz 10Hz V(Ros:2)/ 100Hz 1.0KHz 10KHz 100KHz 1.0MHz 10MHz V(Rp:1) Frequency Si bien la transferencia es constante con la frecuencia, no significa que la tensión medida sobre el osciloscopio no cambie con la frecuencia, ya que el conjunto punta-osciloscopio, seguirá presentando un efecto de carga que cambia con la frecuencia por efecto de la impedancia de entrada. 100MHz Por lo tanto, la tensión sobre el osciloscopio está graficada a continuación, donde se observa un ancho de banda mucho mayor que en el caso de la punta directa, cubriendo el ancho de banda propio del osciloscopio. 110mV 80mV 0000,100.000m) 40mV 0V 1.0Hz 10Hz 100Hz 1.0KHz 10KHz 100KHz 1.0MHz 10MHz 100MHz V(Ros:2) Frequency En virtud de un análisis más estricto teórico que aparece en el apéndice, se puede comprobar que el modelo equivalente de la punta puede reducirse a una resistencia en paralelo con una capacitancia, datos que proveen los fabricantes de puntas para determinadas características del osciloscopio o como lo especifica Tecktronix como resistencia / capacitancia para determinado modelo de osciloscopio. El modelo práctico es el siguiente. Rg 2 1 Vg 2 25 2 10Meg 1 0 0 1 11pF 0 Con cierta variación en la capacitancia según el fabricante. Está claro del circuito, que además de modificarse la lectura de la tensión sobre el osciloscopio, por efecto de la impedancia del conjunto punta-osciloscopio, también, si se realiza una medición de tiempo de crecimiento, ésta se verá afectada por el efecto de carga debido a que ahora el generador deberá cargar a una capacitancia más grande, la del circuito a medir más la del propio sistema de medición, aparecerá por tanto un error sistemático por efecto de carga. La empresa Tecktronix, provee un gráfico que permite obtener el error relativo por efecto de carga en el tiempo de crecimiento. Dicho gráfico aparece a continuación. En este gráfico puede observarse que si el conjunto osciloscopio- punta tien un tiempo de crecimiento tres veces más rápido que el del generador que estamos midiendo, cometeremos un error dentro del 5% y si es cinco veces más rápido, el error será del orden del 2% Todo el análisis realizado es válido en al medida que la punta esté compensada, entonces la cuestión es cómo sabemos si la punta está compensada. Para tal fin, el osciloscopio cuenta con una salida conocida como calibrador. Este conector, provee una salida de onda cuadrada con valor pico alrededor de centenas de mV y frecuencia alrededor del kHz. Una onda cuadrada tiene componentes armónicos de la frecuencia fundamental, de modo que el sistema puede dejar pasar todas las componentes con sus valores originales o atenuar algunas más que otras. Si el sistema tiene una respuesta plana como la vista anteriormente cuando la punta está compensada, veremos el tren de pulsos con sus bordes rectos. En otro orden, si el circuito se comporta como filtro pasabajo disminuirá la amplitud de las frecuencias altas que son las que conforman los flancos del pulso, por lo tanto se verán dichos flancos redondeados y diremos que la punta esta subcompensada. Si el circuito se comporta como filtro pasaaltos entonces reducirá las componentes de baja frecuencia respecto de las altas; en esa circunstancia el pulso tendrá un sobreimpulso y diremos que la punta está sobrecompensada. Cada uno de los oscilogramas mencionados aparecen en los gráficos siguientes. Por lo tanto bastará colocar la punta en el calibrador y ajustar con el destornillador adecuado el tornillo que permite variar la capacitancia de ajuste que habitualmente está sobre el conector BNC, hasta obtener un oscilograma como el “c” del diagrama anteriror. Finalmente cuando realizamos mediciones en alta frecuencia y pulsos conviene realizar la conexión de tierra lo más corta posible, pues ella introduce una cierta inductancia, la cual junto a la resistencia y capacitancias del circuito constituirá un R-L-C el cual puede producir oscilaciones amortiguadas, ya que se trata de un sistema de segundo orden. Lo anterior queda expresado en el gráfico de abajo.en el cual se mide un circuito a medir y el efecto de la inductancia de tierra que se pone de manifiesto en el ringing Como nota aclaratoria, podemos decir que como se observa en los diagramas circuitales que hemos dibujado y que se utilizan para valorar propiedades de las puntas, los generadores tienen impedancias resistivas de 25Ω. Esto se debe a que la industria reconoce como banco de medición para las pruebas la utilización de un generador de 50Ω adaptado, es decir terminado en 50Ω lo que proporciona una resistencia equivalente de Thévenin de 25Ω. Un set completo de una punta de osciloscopio Tecktronix se observa en la fotografía adjunta., donde se observan la punta con el capuchón y sus accesorios como el clip de tierra y el destornillador para el ajuste de compensación. 5) Medición de fase Por supuesto se ha visto el método fundamentado en las figuras de Lissajous. No obstante encararemos ahora un método directo y más exacto. Consiste en obtener el número de divisiones entre los cruces por cero de las dos señales pero con una variante. El método consiste en lo siguiente: a) Ubicamos medio período de la señal a medir en las diez divisiones horizontales de la pantalla con ayuda del descalibrado de la base de tiempo. b) Medimos el número de divisiones entre los puntos de paso por cero de ambas señales. c) Al abarcar medio período las 10 divisiones, tendremos una escala , por lo tanto, podemos determinar el valor del ángulo de desfasaje en grados con la expresión siguiente: , donde N es el número de divisiones leídas. d) La incerteza en la medición tiene origen en la apreciación y en la alinealidad. Hay que aclarar que no aparece la exactitud de la base de tiempo, ya que no medimos tiempo. Por lo tanto 6) Medición de la frecuencia de corte Definimos a la frecuencia de corte como la frecuencia para la cual la respuesta en frecuencia cae al 70.7% de su valor máximo. Por lo tanto una de las posibilidades en variar la frecuencia de abajo hacia arriba, hasta observar en la pantalla del osciloscopio una caída del 70.7%. Pero otra forma de medir, se basas en el hecho que cuando se alcanza la frecuencia de corte, el desfasaje entre las señales de entrada y salida es de 45°, de manera que con el método indicado de medición de fase, se varía la frecuencia hasta que se llega a obtener el desfasaje indicado. La lectura de la frecuencia, indica la frecuencia de corte. 7) Apéndice 1 Admitancia de la punta En principio diremos que la admitancia se la define como el número complejo inverso de la impedancia y el hecho de usarla en lugar de esta última es que permite determinar en forma directa el modelo equivalente paralelo de todo el circuito de carga. En forma matemática es , donde las rayitas sobre las letras indican su condición de número complejo o vector. Se trata de un circuito serie, de manera que deberán sumarse las impedancias de cada uno de las secciones en paralelo, es decir donde las rayitas sobre las letras indican su condición de número complejo o vector. Se trata de un circuito serie, de manera que deberán sumarse las impedancias de cada uno de las secciones en paralelo, es decir , donde cada uno de los denominadores representan las admitancias de los respectivos circuitos paralelos. Vamos a tratar de modificar operando algebraicamente la expresión anterior para ponerla de una forma más útil para nuestro objetivo. Donde j es la unidad imaginaria. Operando resulta Rp Rosc Z= + , pero recordando la condición que 1 + jωCpRp 1 + jωCoscRosc , CpRp = CoscRosc = τ podemos reemplazar en la expresión de Z, resultando Rp Rosc Rp + Rosc Z= + = y para hallar la admitancia bastará invertir la expresión 1 + jωτ 1 + jωτ 1 + jωτ anterior 1 + jωτ 1 ωτ Y= = +j , siendo los dos últimos términos la conductancia Rp + Rosc Rp + Rosc Rp + Rosc (parte real) y la susceptancia (parte imaginaria), de manera que es muy sencillo ahora determinar las componentes del circuito paralelo. Está claro, por un lado que la resistencia equivalente paralelo será Rp + Rosc , mientras que la capacitancia paralelo la podemos obtener sabiendo que la susceptancia capacitiva puede escribirse Rosc ωτ ωCeq = , de manera que Ceq = Cosc que para nuestro caso es Rp + Rosc Rosc + Rp Cosc 1M 1 Rosc = = , por lo que Ceq = , con lo que se observa que la Rp + Rosc 1M + 9 M 10 10 capacitancia de entrada de este modelo, es diez veces menor que la que tendríamos si acopláramos directamente el generador al paralelo C R . os 8) Apéndice 2. Frecuencia de corte del circuito R-C os Para el cálculo analítico recurrimos al concepto de divisor de tensión en este caso resistivocapacitivo. Por lo tanto la tensión en la salida del circuito, podemos escribirla del siguiente modo: Antes de continuar fijémonos que conceptualmente, a medida que la frecuencia se reduce, la tensión sobre el capacitor se hace más “parecida” a la del generador, difiere menos en fase y en amplitud. En el caso límite de la continua , ambas tensiones coinciden. Continuando con el cálculo, la expresión anterior es un número complejo, de manera que tendrá un módulo y una fase. El módulo, lo podemos determinar como Mientras que el ángulo de fase es lo cual se aprecia en el diagrama fasorial siguiente: Por otra parte, la variación de la fase con la frecuencia es la indicada a continuación. Es interesante encontrar la relación que existe entre la frecuencia de corte y los componentes del circuito. 1 Por definición, la frecuencia de corte es aquélla para la cual la transferencia del circuito cae a = 0.707 . 2 del valor máximo. Deberá entonces cumplirse , por lo tanto Finalmente obtenemos . Se observa de las relaciones anteriores que en la frecuencia de corte las partes real e imaginaria del denominador deben ser iguales, por lo tanto, el desfasaje será -45°. En otro orden también hay una relación entre la frecuencia de corte y el tiempo de crecimiento, la cual surge del siguiente modo: Vemos aquí una relación, aunque previsible, muy interesante, cuanto mayor es el ancho de banda del sistema menor es el tiempo de crecimiento del mismo. Redactó: Ing Adrián Darío Rosa Cualquier consulta o crítica será bienvenida a: [email protected] Bibliografía: ABC of Probes (Tecktronix): www.tecktronix.com/accesories 13