Teoría de Comunicaciones
Anuncio

I ASPECTOS BÁSICOS DE LAS
COMUNICACIONES
•
DEFINICIONES. SEÑALES E INFORMACIÓN
Comunicación: Proceso por medio del cual la información se
transfiere de un punto llamado fuente a otro denominado destino.
•
Sistema de comunicación o transmisión constituye la totalidad
de mecanismos que proporcionan el enlace para la transferencia
de información entre la fuente y el destino. Cuando se habla de
un Sistema de Telecomunicación, normalmente se hace
referencia a un sistema de comunicación en el que fuente
(transmisor) y destino (receptor) están separados una gran
distancia.
•
Señal: onda eléctrica o luminosa producida gracias a la acción de
un transductor[1], y es la que viaja a través del medio de enlace
entre fuente y destino.
[1] La voz, onda acústica, es transformada en una onda eléctrica
gracias a la acción de un micrófono.
DEFINICIONES. SEÑALES E INFORMACIÓN
• Información: La información puede ser: voz, texto,
imágenes, video, etc.
• La señal es una materialización física de la información.
Fuente de información Digital: produce un conjunto
finito de posibles símbolos; ej: una computadora, una
máquina de escribir.
• Fuente de información Analógica: produce símbolos
que son definidos sobre un rango continuo de valores;
ej.: voz, música, imágenes, video.
• Sistema de Comunicación Digital: Transfiere
información desde una fuente digital hacia el
destinatario. El primer sistema de comunicación digital
data del año 1838, cuando Cooke y Wheatstone
construyeron el telégrafo.
• Sistema de Comunicación Analógico: Transfiere
información desde una fuente analógica hacia el
destinatario.
1.2 ESTRUCTURA DE UN SISTEMA DE
COMUNICACIÓN BÁSICO
CANAL DE TRANSMISIÓN
TRANSDUCTOR IN
TRANSMISOR
RECEPTOR
Ruido
Interferencia
Distorsión
TRANSDUCTOR
OUT
1.2 ESTRUCTURA DE UN SISTEMA DE
COMUNICACIÓN BÁSICO
• Transmisor: A fin de conseguir una transmisión fiel y
eficiente, en el transmisor de un sistema de
comunicación digital se deben realizar varias
operaciones como: compresión, encripción, codificación
para control de errores, etc. Adicionalmente, es el
transmisor, tanto de un sistema de comunicación digital
como analógico, el encargado de realizar la
amplificación, la modulación en caso de que la
transmisión se realice con portadora, etc.
• Canal de Transmisión: Es el enlace entre el transmisor
y el receptor. El canal de transmisión está constituido
por medios de transmisión; y, en él ocurren ciertos
fenómenos que alteran la señal que viaja (Distorsión,
Interferencia y Ruido).
1.2 ESTRUCTURA DE UN SISTEMA DE
COMUNICACIÓN BÁSICO
• Otro fenómeno presente en un canal de
transmisión, pero que no altera la forma de la
señal es la Atenuación, que no es sino la
disminución progresiva de la potencia de la
señal que se tiene conforme aumenta la
distancia que recorre dicha señal.
• Si la atenuación que experimenta una señal es
muy grande se requerirá colocar en puntos
intermedios repetidores (en los sistemas de
comunicación analógicos) o regeneradores (en
los sistemas de comunicación digital).
1.2 ESTRUCTURA DE UN SISTEMA DE
COMUNICACIÓN BÁSICO
• El medio de transmisión puede ser: guiado
(cobre, vidrio o plástico) o no guiado (aire,
vacío, agua de mar).
• La atenuación depende del tipo de medio de
transmisión.
• Para medios guiados, la atenuación es una
función generalmente logarítmica y típicamente
expresada en dB (decibelios) por unidad de
distancia (dB/Km).
• Para medios no guiados la atenuación es una
función más compleja, que depende no sólo de
la distancia sino de la estructura de la
atmósfera.
1.2 ESTRUCTURA DE UN SISTEMA DE
COMUNICACIÓN BÁSICO
• Receptor: Extrae del canal la señal deseada y
la convierte a una forma tal que pueda ser
manejada por el destinatario.
• Como las señales que llegan al receptor son
frecuentemente débiles a causa de la
atenuación, el receptor incorpora etapas de
amplificación.
En el receptor se deben realizar las operaciones
inversas a las ejecutadas en el transmisor; por
tanto incluye un bloque de procesamiento de
señal
(descompresión,
desencripción,
decodificación de canal, etc) y, en caso de una
transmisión con portadora un bloque de
demodulación.
1.4 UNIDADES DE MEDIDA UTILIZADAS
EN COMUNICACIONES
Decibelio (dB): Unidad utilizada para medir la ganancia o
atenuación de un sistema de comunicación.
Representa una relación logarítmica de dos potencias
(P2 y P1). Así:
dB = 10 log10 (P2/P1)
• Si se aplica una señal de 10mw a la entrada de un canal
de transmisión y luego de una cierta distancia se mide
una potencia de sólo 5 mw, se puede expresar esta
pérdida de potencia como:
Pérdida = 10 log10( 5mw/10mw) = 10 (-.3) = - 3dB
• Los dB son unidades relativas, pues relacionan dos
potencias.
1.4 UNIDADES DE MEDIDA UTILIZADAS
EN COMUNICACIONES
dBm: Decibelio-miliwatt. Es una unidad de medida en la
que se selecciona 1 mw como nivel de referencia, el
mismo que corresponde a 0dBm. De modo que el nivel
absoluto de potencia en dBm es:
dBm = 10 log10 (P/1mw)
Donde P debe expresarse en mW.
dBW: Decibelio-watt. Otra unidad para medir el nivel
absoluto de potencia de una señal es el dBW, que utiliza
una potencia referencial de 1 W.
dBW = 10 log10 (P/1w)
dBW = dBm – 30
Donde P debe expresarse en W.
RELACIÓN SEÑAL A RUIDO
Relación Señal a Ruido, S/N o SNR: Es un parámetro que mide la
calidad de un sistema de comunicaciones; entre más alta sea la
relación señal a ruido, mejor será la calidad del sistema.
• Corresponde a la relación del nivel de potencia de la señal con
respecto al nivel de potencia del ruido, normalmente evaluado en el
lado del receptor. La relación Señal/Ruido se expresa
frecuentemente en dB.
S/N = Potencia de la señal/Potencia del ruido
• Ejemplo: Si se tiene un sistema en el que la potencia de la señal es
10 dBm y el ruido es de 1 w, la relación señal a ruido es:
10 dBm = 10 mW, esto es S = 10 mW
N = 1 W
(S/N)dB = 10x10³ o 40 dB.
Si el nivel de ruido aumenta, S/N disminuye, esto es la calidad del
sistema se deteriora; así por ejemplo, si el ruido es de 1mw, se tendrá:
S/N = 10 o 10 dB
1.6.1 ANÁLISIS EN EL DOMINIO
TEMPORAL
• La señales senoidales juegan un papel
importante en el análisis de los sistemas de
comunicaciones.
• Una señal sinusoidal puede expresarse
matemáticamente como:
f(t) = A Cos (wt + Θ)
• Donde A es la amplitud pico, Θ es la fase y w es
la frecuencia angular de la sinusoide (expresada
en radianes por segundo). Una señal de esta
forma es una función periódica.
1.6 ANÁLISIS DE SEÑAL: TIEMPO,
FRECUENCIA (ESPECTRO) Y ANCHO DE
BANDA
• 1.6.2 ANÁLISIS EN EL DOMINIO FRECUENCIAL:
ESPECTRO
• Mediante un análisis en frecuencia (análisis de
Fourier) de una señal es posible determinar sus
frecuencias constitutivas.
• Espectro de una señal: Es todo el conjunto de
frecuencias que la constituyen y se muestra
usando un gráfico en el dominio de la
frecuencia.
• Por ejemplo una señal de la forma Cos (260t)
tiene como única componente de frecuencia
aquella de 60 Hz, consecuentemente su
espectro sólo incluye aquella frecuencia.
Ancho de Banda de una señal:
• Ancho de banda absoluto: Es el rango de
frecuencias que ocupa el espectro de una señal,
para determinarlo se debe sustraer la frecuencia
más baja de la frecuencia más alta.
• Si la mayor parte de la energía o potencia de
una señal está concentrada en una banda
relativamente angosta, como usualmente
ocurre, a esta banda se denomina ancho de
banda efectivo o simplemente ancho de
banda.
• El ancho de banda se mide en Hertzios [Hz].
Señales de potencia
• Potencia instantánea: p(t) = v(t)i(t)
• Potencia promedio normalizada: Para una
carga resistiva unitaria, R = 1, se define:
P=
• T = período
1
T T
lim
T
2
2
x
(t ) dt
[Wattios]
T
2
• x(t) puede ser o bien una señal de voltaje v(t) o
de corriente i(t).
• Señal de potencia: x(t) es una señal de
potencia si y solo si la potencia promedio
normalizada, P, es finita y distinta de cero. (Es
decir: (0 < P < ).
• Una señal periódica es una señal de potencia.
Señales de Energía
• Energía normalizada (E):
E lim
T
T
2
x
T
2
2
(t ) dt
[Joules]
• Señal de energía: x(t) es una señal de
energía si y solo si la energía normalizada
total es finita y distinta de cero. (Es decir 0
< E < ).
• Una señal no periódica es una señal de
energía.
1.6 ANÁLISIS DE SEÑAL: TIEMPO, FRECUENCIA
(ESPECTRO) Y ANCHO DE BANDA
1.6.2.1 TRANSFORMADA DE FOURIER Y ESPECTRO:
• La transformada de Fourier es aplicable a señales no
periódicas.
• Evaluando la Transformada de Fourier de x(t), podemos
determinar el espectro de dicha señal y el nivel relativo
de una frecuencia con respecto a otra.
• La transformada de Fourier de una función x(t) se
define como:
X(f) = F[w(t)] =
j 2ft
x
(
t
)
e
dt
• X(f) es compleja aunque x(t) sea real.
• A |X(f)| se denomina espectro de magnitud (amplitud)
y, usualmente de manera imprecisa se la denota como
espectro.
• (f) se denomina espectro de fase, que para fines de
este curso no nos interesa.
TEOREMA DE RAYLEIGH
• El teorema de Rayleigh, para señales de
energía, establece que la energía se
puede determinar:
E=
x(t )
2
dt
X( f )
2
df
[Joules]
• Es por tanto un método alternativo para
evaluar la energía usando la descripción
en el dominio de la frecuencia, en lugar de
la definición en el dominio del tiempo.
DENSIDAD ESPECTRAL DE ENERGÍA (ESD)
• La ESD, ξ(f), definida para una señal de
energía por:
ξ(f) = X(f) 2 Joules/Hz
• De manera que la energía normalizada
total, E, está dada por el área bajo la
función densidad espectral de energía
ξ(f).
• ξ(f) proporciona la contribución en energía
de cada componente de frecuencia que
tiene la señal.
1.6.2.2 SERIES DE FOURIER Y
ESPECTRO:
• El espectro para una señal periódica con período T0
está dado por:
F f nf
n
n
0
1
, f0
T0
• Donde T0 es el período de la señal, δ es la función delta
de Dirac y Fn los coeficientes de Fourier.
• El espectro de Fourier constituye el gráfico del módulo
de los coeficientes de Fourier en función de f.
• Para una señal periódica el espectro sólo existe en
valores discretos de f, es decir, una señal periódica
siempre tiene un espectro discreto o de línea.
• Si la señal no es periódica el espectro es continuo.
1.6.2.2 SERIES DE FOURIER Y
ESPECTRO:
• Los coeficientes de Fourier complejos, Fn,
están dados por:
1
Fn
T0
• Donde w0 = 2π/f0
a T0
jn0t
x
(
t
)
e
dt
a
DENSIDAD ESPECTRAL DE POTENCIA
(PSD), P(f):
• La densidad espectral de potencia, P (f), se define para
señales de potencia.
• La PSD determina la contribución en potencia de las
diferentes componentes de frecuencia constitutivas de la
señal.
• La PSD es de mucha utilidad en la descripción de cómo
el contenido de potencia de señales y ruido es afectada
por filtros y otros dispositivos en un sistema de
comunicaciones.
• La PSD se usa para identificar la ubicación del máximo
contenido de potencia de la señal que será transmitida a
través del canal, esto a fin de poder ajustar dichas
características espectrales a las del canal.
DENSIDAD ESPECTRAL DE POTENCIA
(PSD), Р(f):
• La PSD es más útil que la ESD, puesto
que
modelos
tipo
potencia
son
generalmente
usados
en
resolver
problemas de comunicaciones.
• La potencia promedio normalizada, P,
vendrá dada por la integral de la función
densidad espectral de potencia:
P=
P (f)df
TEOREMA DE PARSEVAL:
• El teorema de Parseval para señales
periódicas
relaciona
la
potencia
normalizada promedio P de una señal con
sus coeficientes de Fourier, así:
1
P
T0
a T0
x(t )
a
2
dt
F
n
n
2
DENSIDAD ESPECTRAL DE POTENCIA
PARA SEÑALES PERIÓDICAS:
• Para una señal periódica, w(t), la densidad
espectral de potencia está dada por:
• P (f) =
F
n
2
f nf0 [Wattios/Hz]
n
• Donde T0 = 1/f0 es el período de la señal, δ es la
función delta de Dirac y Fn los coeficientes de
Fourier.
• Esta relación no solamente proporciona una
forma para evaluar la PSD de una señal
periódica, sino que también puede ser usada
para estimar el ancho de banda de dichas
señales.
1.7 TRANSMISIÓN DIGITAL versus
TRANSMISIÓN ANALÓGICA
• Sincronismo: Sincronizar significa coincidir o
estar de acuerdo en tiempo.
• En un sistema de transmisión digital es
necesario por tanto establecer una referencia de
tiempo común entre el transmisor y el receptor,
a fin de poder interpretar correctamente la
información que está siendo transmitida.
• La sincronización puede llegar a ser
extremadamente complicada en un sistema de
comunicación digital y, a medida que aumenta
la velocidad con la que se transmite la
información el sincronismo resulta más crítico.
1.7 TRANSMISIÓN DIGITAL versus
TRANSMISIÓN ANALÓGICA
Desventajas
• Ancho de Banda: El espectro de una
señal digital ocupa mayor ancho de banda
con respecto al de una señal analógica.
• A mayor ancho de banda de una señal
digital mayor será el ancho de banda del
canal necesario para su transmisión; y,
para un canal de transmisión de mayor
ancho debanda, mayor será su costo.
SEÑAL APERIÓDICA
• PULSO RECTANGULAR
w(t)
1
t
TRANSFORMADA DE FOURIER
DE UNA SEÑAL APERIÓDICA
• TF DE UN PULSO RECTANGULAR
X(f )
2
1e
j t
dt
2
sen
2
X ( f )
2
e
j
2
e
j
j
2
TF DE UN PULSO
RECTANGULAR
• Vamos a usar la expresión: Sa(x) = sen x
x
• X(f) = Sa(/2) = Sa(f)
• (t/) ↔Sa(f)
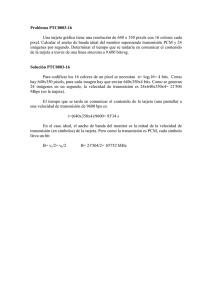
GRÁFICO DE LA TF DE UN PULSO
RECTANGULAR (ESPECTRO)
• X(f) = Sa(/2) = Sa(f)
W(f) Sa(f)
1.5
f( x )
-2/
-3/
-1/
1/
2/
3/
f
0.217234
9.424778
x
9.424778
El espectro de un pulso corresponde por tanto al módulo
de esta función. El espectro es continuo en frecuencia.
DENSIDAD ESPECTRAL DE ENERGÍA DE
UN PULSO RECTANGULAR
2
E(f) W(f) 2Sa2(f)
1.5
2
( f( x) )
2
f
-3/
-2/
2/
3/
.5
9.424778
x
9.424778
ENERGÍA NORMALIZADA TOTAL DE UN
PULSO RECTANGULAR
• La energía normalizada total de dicho pulso es:
E
2
x(t ) dt 12 dt
2
2
• En tanto que la energía en el primer lóbulo del
espectro está dada por:
1
E1
1
1
X ( f ) df
2
2
S
(
f
)
df
a
0.92
1
• De manera que ~ el 90% de la energía está
contenida en el primer lóbulo espectral.
ENERGÍA DE UN PULSO
RECTANGULAR
• El primer lóbulo espectral esto es aquel
comprendido hasta f=1/ contiene más del 90%
de la energía total.
• A medida que aumenta la frecuencia “f”, la
amplitud de las colas del espectro van
disminuyendo.
• Este hecho refleja que la señal en lugar de
ocupar un ancho de banda infinito, puede ser
confinada a un ancho de banda finito y aún
constituir una muy buena aproximación de la
señal original.
ENERGÍA DE UN PULSO
RECTANGULAR
• Esto implica que en la transmisión de una
señal digital, no es necesario transmitir
todas sus componentes espectrales, sino
únicamente las más representativas, lo
cual permitirá reducir requerimientos de
ancho de banda de canal (rango de
frecuencia que deja pasar dicho canal)
para la transmisión.
• Mientras mayor sea el número de
componentes de frecuencia que puedan
ser enviados, se conseguirá una
transmisión más fiel de la señal.
SEÑAL PERIÓDICA
• TREN DE PULSOS RECTANGULARES
w(t)
A
-/2
/2
T0/2
T0
t
COEFICIENTES DE FOURIER DE UN
TREN DE PULSOS RECTANGULARES
1
Fn
T0
T0
2
x(t )e
jn0t
T0
2
1
dt
T0
2
Ae
jn0t
jn0
jn0 2
2
e
dt
e
jn0T0
A
2
sen n0
2A
A
2 A
Fn
sen n0
S a n0
n0T0
2 T0
T0
2
n0
2
1
F0
T0
Fn
2
Adt
A
T0
,n0
2
A
S a n0 , n 0
T0
2
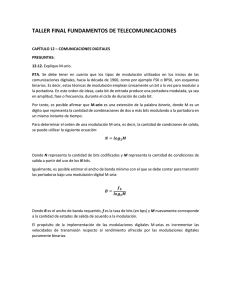
GRÁFICO DE LOS CF DE UN TREN DE
PULSOS RECTANGULARES
(ESPECTRO)
F
n
1.5
A
S a n
T0
0
2
A
T0
f( x)
f( n )
-2/
2
f
2/
1
T0
0.217234
20
x n
20
TREN DE PULSOS RECTANGULARES
(ESPECTRO)
• El espectro del tren de pulsos rectangulares
corresponderá al gráfico del módulo de los coeficientes
de Fourier.
• El espectro de una señal periódica, tren de pulsos
rectangulares, es discreto en frecuencia, pues sólo tiene
componentes de frecuencia discretas, que corresponden
a múltiplos de la frecuencia fundamental, f0.
• La PSD de esta señal se podrá evaluar elevando al
cuadrado el módulo de los coeficientes de Fourier.
• En el caso de señales periódicas también se cumple que
aproximadamente el 90% de la potencia total de la señal
está contenida en el primer lóbulo espectral. De manera
que las componentes de frecuencia más importantes de
la señal corresponden a las del primer lóbulo.
CONCEPTOS BÁSICOS SOBRE
COMUNICACIONES DE
DATOS
Comunicación de datos es la transmisión de información
digital, normalmente en forma binaria, (bits: unos y ceros).
Los 1s y 0s pueden provenir de voz codificada, datos o
imágenes codificadas, etc.; esto es, señales digitales que
pueden ser generadas por un computador o por cualquier
otro tipo de dispositivo digital.
Una red de comunicación de datos puede ser tan simple
como dos computadores conectados o tan compleja que
involucre a miles de computadores y terminales.
Las comunicaciones de datos se han expandiendo
vertiginosamente, y son cada vez más los usuarios que
emplean sistemas de comunicaciones basados en
computadores.
ESQUEMA DE UN SISTEMA DE
COMUNICACIÓN DE DATOS
EQUIPO
TERMINAL
DE DATOS
CODEC /
MODEM
CODEC /
MODEM
EQUIPO
TERMINAL
DE DATOS
ESQUEMA DE UN SISTEMA DE
COMUNICACIÓN DE DATOS:
• DTE (Data Terminal Equipment o Equipo Terminal
de Datos): Incluye al terminal fuente o destino de
datos y al controlador de comunicaciones
• Terminal fuente o destino de datos: PC, terminal,
impresora, cinta magnética, etc. Constituye la
fuente o destino final de los datos.
• Controlador de Comunicaciones: Permite el
manejo adecuado de los datos estableciendo
formatos, protocolos, etc.
• Interfaz: Punto en el cual un equipo se conecta a otro. Ej.
RS232E, V35, X21, etc. Para conectar el DTE al DCE
requerimos del concurso de un interfaz.
ESQUEMA DE UN SISTEMA DE
COMUNICACIÓN DE DATOS:
• DCE (Data Circuit-Terminating Equipment o Equipo de
Terminación del Circuito de Datos): Tiene como función
adaptar la información a transmitirse al medio de
transmisión, mediante ciertas modificaciones de la
misma, así pues el DCE lo puede constituir:
CODEC, si la transmisión se realiza en banda base,
en cuyo caso no hay traslación de frecuencias y la
señal a transmitirse sigue siendo de naturaleza
digital, aunque el espectro de la señal se puede
modificar en cuestión de forma.
MODEM, si la transmisión se realiza usando una
portadora modulada, en cuyo caso la señal a
transmitirse es analógica, y el espectro se traslada.
CÓDIGOS PARA REPRESENTAR LA
INFORMACIÓN
• Para la transmisión de datos es usual representar la información (sea
ésta: números, letras del alfabeto, símbolos u otros tipos de datos)
como grupos de bits de longitud uniforme establecida o caracteres.
• Un código de “a” bits puede tener 2ª caracteres diferentes.
• Código ASCII normal
•
ASCII (American National Standard Code for Information Interchange).
• Desarrollado por ANSI, código más usado por los terminales
computadora.
• Tiene 8 bits por carácter: 7 bits de datos, con un octavo bit
paridad, de manera que en total se tiene 128 posibles caracteres.
• El bit del extremo derecho es el bit 1 (LSB), siendo el primero
transmitirse en una transmisión serial; y, el del extremo izquierdo
el bit 8 (bit de paridad).
de
de
en
es
Ej: A= 1000001 o 41H
• Dispone de varios caracteres para control, ej: ESC: escape, ETB: fin
de bloque de transmisión, ETX: fin de texto, etc.
Código ASCII
• Una versión modificada de ASCII, denominada
ASCII extendido reemplaza el bit de paridad
con un octavo bit de datos, en cuyo caso se
tienen 256 diferentes caracteres, en los que se
incluyen caracteres de otros idiomas, marcas de
acentuación, caracteres científicos y gráficos.
• Es necesario que entre los equipos que se
establece comunicación, todos usen el mismo
código o haya conversión de código
previamente.
Control de Paridad
• Uno de los aspectos fundamentales en la transmisión de
datos es reconocer cuando ocurren errores en la
transmisión; así pues cuando el transmisor envía un 1L
y el receptor recibe un 0L se ha producido errores en la
transmisión.
• La forma más elemental para detectar errores en una
transmisión es mediante la adición de un bit de paridad,
el cual constituye un bit auxiliar añadido a los bits de
datos y que permite controlar si el caracter se recibió sin
errores.
• El Bit de paridad es calculado evaluando el número de
1s presentes en el caracter. Así se pueden tener dos
alternativas:
Control de Paridad
• Paridad Par:
• Si el número total de 1s de un caracter es un número
impar, el bit de paridad es un 1L, de tal manera que el
número total de 1s de todo el carácter (datos + paridad)
sea un número PAR. Si por el contrario el número de 1s
es par, el bit de paridad será un 0L, de manera que el
número total de 1s sea nuevamente PAR.
• Paridad Impar:
• Similar al control de paridad par, pero en este caso el
número de 1s de un caracter, incluido el de paridad, debe
ser impar.
• Para la detección de errores se compara la paridad
recibida con la paridad local que se calcula en el receptor.
Si éstas son iguales NO se produjo error en la
transmisión. Si éstas difieren, SI se produjo error.
• Si el número de bits errados es par, no se detectan estos
errores mediante el chequeo del bit de paridad.
TRANSMISIÓN DE DATOS SERIAL Y
PARALELA
• 4.4.1 Transmisión Serial
• Los bits que constituyen un caracter son enviados uno a
continuación de otro, a una determinada frecuencia de
reloj, requiriendo de una sola vía de comunicación para
la transmisión.
• Minimiza los costos de transmisión (una sola vía).
• Se utiliza en general para comunicaciones de larga
distancia.
• Su desventaja principal es la reducida velocidad de
transmisión, pues cada caracter debe ser desmembrado
bit a bit para la transmisión y luego reconstituido en el
receptor.
• Utilizada comúnmente para comunicación entre un host
y terminales remotos.
• La mayoría de los sistemas de comunicaciones, debido
a que realizan comunicaciones a gran distancia, son del
tipo serial.
TRANSMISIÓN DE DATOS SERIAL Y
PARALELA
• Transmisión Paralela
• Los bits que conforman un caracter se transmiten
simultáneamente, por tanto se requerirán tantas vías de
comunicación como bits tenga el caracter.
• Permite conseguir mayores velocidades de transmisión.
• Los costos de transmisión se incrementan, pues se
requiere de una infraestructura más compleja.
• Adecuada para cortas distancias, como por ejemplo entre
el computador y la impresora.
• El sincronismo en un sistema de comunicación en paralelo
complica su implementación práctica.
• Generalmente las comunicaciones en paralelo utilizan 8
vías para enviar caracteres de 8 bits de datos (byte)
simultáneamente.
TRANSMISIÓN ASINCRÓNICA Y
SINCRÓNICA DE LA INFORMACIÓN
• Existen dos métodos comunes hoy en día para
realizar una transmisión de información digital.
• Su diferencia radica en la forma como se
establece la referencia de tiempo común
(sincronismo) entre el transmisor y el receptor, a
fin de poder interpretar correctamente la
información que está siendo transmitida.
TRANSMISIÓN ASINCRÓNICA DE LA
INFORMACIÓN
Transmisión Asincrónica o Start-Stop
• Asíncrono significa que transmisor y receptor tienen sus propios
relojes, de igual frecuencia, pero independientes. No existe una
señal de sincronismo enviándose entre Tx y Rx, es decir no
existe una coordinación temporal estricta entre el Tx y Rx.
• La estrategia de este método para solucionar el problema de la
sincronización consiste en NO enviar cadenas de bits largas e
ininterrumpidas. Los datos son transmitidos un CARACTER a la
vez y cada caracter debe consistir de un número reducido de bits
dependiendo del código utilizado.
• La sincronización debe mantenerse solamente dentro de cada
caracter, el receptor tiene la oportunidad de resincronizarse al
inicio de cada nuevo caracter.
• En este modo de transmisión el tiempo transcurrido entre el
envío de un caracter y el siguiente es aleatorio, por lo que la
eficiencia disminuye debido al tiempo que transcurre entre
caracteres.
Transmisión Asincrónica o Start-Stop
Transmisión Asincrónica o StartStop
• Cuando se realiza una transmisión asincrónica de un
caracter, se empieza enviando un bit de inicio (start), el
cual es un 0L, seguido entonces por los bits de datos
propiamente, a los que se puede adicionar o no un bit de
control de paridad; y, se termina enviando el o los bits
de parada (1, 1.5 o 2), el cual es un 1L que lleva a la
línea al estado de reposo.
• Es decir el transmisor avisa al receptor que va a llegar
un carácter con el bit de inicio de éste, y la finalización
de dicho carácter con el o los bit(s) de parada.
• En el estado de reposo, el receptor espera por una
transición de 1 a 0 para reconocer el inicio del siguiente
caracter y luego muestrea (lee) la señal entrante
correspondiente a ese caracter a intervalos Tb, tantas
veces cuantos bits tenga el caracter asincrónico que
está siendo leído, quedando luego a la espera de la
siguiente transición de 1 a 0.
Transmisión Asincrónica o Start-Stop
Transmisión Asincrónica o StartStop
• No se envía reloj o señales de sincronización con los
datos, sino que el transmisor y el receptor tienen en
una transmisión asincrónica relojes internos que se
sincronizan en cada caracter que está siendo enviado
a partir del bit de inicio.
• Es decir que cuando el bit de inicio llega al Rx, éste
dispara su reloj interno y se mantiene esperando por
la lectura de los bits que vienen luego
(datos+paridad).
• Transmisor y receptor deben trabajar a la misma
velocidad de transmisión.
• Este modo de transmisión es utilizado en general para
bajas velocidades de transmisión.
Transmisión Sincrónica
• Los caracteres en una transmisión sincrónica son
transmitidos uno tras otro de una manera secuencial y
sin pausas entre caracteres.
• Los caracteres a ser transmitidos no incluyen bits de
inicio y de parada, pero en su lugar la sincronización es
provista o bien usando caracteres de sincronismo o bien
usando señales de reloj, prefiriéndose la primera
alternativa.
• La transmisión sincrónica de datos generalmente
involucra el envío de largos bloques de caracteres; y, se
envían caracteres especiales de sincronismo al inicio de
este bloque de datos.
• Estos caracteres de sincronismo constituyen una serie
específica de bits que el dispositivo receptor puede usar
para ajustarse a la velocidad exacta del transmisor.
Transmisión Sincrónica
Transmisión Sincrónica
• Además de los datos y de la sincronización, es
necesario incluir: caracteres de comienzo y de final del
bloque de datos, caracteres para corrección de errores
y control, etc. Toda esta estructura se denomina trama.
• Entre tramas, se mantiene activo el canal con la
transmisión continua de caracteres especiales. De no
utilizarse estos caracteres deberán enviarse dos o más
caracteres de sincronismo.
• El modo de transmisión sincrónica se utiliza para
transmitir grandes bloques de datos o para tener
elevadas velocidades de transmisión.
• La eficiencia en una transmisión sincrónica es
significativamente mayor a la del modo asincrónico
Transmisión Sincrónica
Eficiencia de Transmisión
():
• Es la relación entre el número de bits de datos o
información propiamente transmitidos con respecto al
número de bits totales transmitidos
= # de bits de datos / # total de bits transmitidos
• En una transmisión asincrónica, al introducir en cada
caracter bits de inicio y de parada, disminuye su
eficiencia.
• Se podría aumentar la eficiencia de la transmisión
asincrónica enviando caracteres de mayor longitud, pero
con ello se eleva la probabilidad de error de sincronismo
o temporización.
• La transmisión sincrónica es ventajosa, sobre todo
cuando se envían largos bloques de datos, pues la
eficiencia de transmisión es directamente proporcional al
tamaño del bloque de caracteres que está siendo
transmitido.
Eficiencia de Transmisión ():
• Una transmisión asincrónica con 1 bit de inicio, 1 bit de
paridad y 1 bit de parada; velocidad de transmisión de
2Kbps.
800 bits de datos
= 72.72 %
1100 bits totales
• Una transmisión sincrónica con 1 caracter de
sincronismo, 2 de inicio y fin de bloque y 1 caracter para
control de errores, adicionales a los 100 caracteres.
100 * 8
96.15%
104 * 8
MODOS DE EXPLOTACIÓN DEL
CANAL DE TRANSMISIÓN
• En comunicaciones de datos se tienen 3 modos de
transmisión: Simplex, Half Duplex, Full Duplex; y,
adicionalmente se habla de un cuarto modo Full Full
Duplex que es una variante del modo Full Duplex.
• Simplex (SX)
• La comunicación se efectúa en un solo sentido, sin
posibilidad de hacerlo en sentido opuesto. Así, un
dispositivo será el encargado específicamente de
transmitir datos y el otro de recibirlos.
• Un sistema de comunicaciones de un aeropuerto, que
informa la llegada y salida de los aviones es un ejemplo
de
comunicación
simplex.
El
Host
está
permanentemente actualizando la información en los
terminales.
MODOS DE EXPLOTACIÓN DEL
CANAL DE TRANSMISIÓN
• Half Duplex (HDX) o Semiduplex
• La comunicación puede efectuarse en los dos
sentidos pero no al mismo tiempo. Así,
solamente un dispositivo transmite datos a un
tiempo dado; y, generalmente ocurre una pausa
entre el tiempo que terminó de enviar los datos
el un dispositivo y el tiempo en que responde el
otro; esto reduce la eficiencia del sistema.
• Una comunicación entre un terminal bancario y
su correspondiente Host es una comunicación
half duplex.
MODOS DE EXPLOTACIÓN DEL
CANAL DE TRANSMISIÓN
• Full Duplex (FDX)
• La comunicación se efectúa en los 2
sentidos de manera simultánea, es decir
que ambos dispositivos en comunicación
tienen la capacidad de recibir y transmitir
datos al mismo tiempo.
• Una
comunicación
entre
dos
computadores puede ser un ejemplo de
este tipo de comunicación.
TRANSMISIÓN MUTINIVEL
• En los sistemas de transmisión digital se
utilizan señales multinivel, es decir señales
de más de 2 niveles.
• En este escenario se transmiten símbolos,
donde cada símbolo corresponde a una
grupo de bits, y a cada símbolo diferente
se le asigna un nivel de señal distinto para
su transmisión.
• El objetivo de una transmisión multinivel es
reducir requerimientos de ancho de banda.
TRANSMISIÓN MULTINIVEL
• Cuando se transmiten símbolos, aparece
el concepto de velocidad de símbolo o
velocidad de señal, que es la razón del
número de símbolos que se transmiten
por unidad de tiempo (segundo).
• Un símbolo es la agrupación de m bits.
VELOCIDAD DE TRANSMISIÓN, VELOCIDAD
DE SEÑAL y VELOCIDAD DE PROPAGACIÓN
Velocidad de señal: (Vs)
• Expresada en símbolos por segundo o baudios,
constituye la velocidad de transferencia de la
información en baudios o el número de símbolos que se
transmiten por el canal en la unidad de tiempo.
• Otras denominaciones para la velocidad de señal son:
tasa de símbolos (symbol rate), tasa de baudio (baud
rate.
• Una vez que los bits se agrupan en símbolos para la
transmisión, a cada uno de estos símbolos se le asigna
un nivel de señal para efectos de la transmisión. A una
señal de esta naturaleza digital se denomina señal
multinivel.
Velocidad de señal: (Vs)
• El objetivo de trabajar con señales multinivel es
disminuir los requerimientos en ancho de banda para la
transmisión.[1].
• Sea M el número de niveles, un nivel puede transportar
m bits, con m = log2 M, por tanto el tiempo o período de
símbolo, Ts, es:
•
Ts = m Tb
• La velocidad de señal se relaciona con la velocidad de
transmisión de la forma:
Vs = 1/ Ts = 1/mTb = Vt/m = Vt/ log2 M (símbolos/seg o
baudios)
Vt = log2 M * Vs
•
[1] Para una señal binaria el primer cruce por cero del espectro se
da a 1/Tb. El espectro de una señal multinivel mantiene la forma del
espectro de una señal binaria, pero los cruces por cero del espectro
se dan ahora a múltiplos de 1/Ts.
VELOCIDAD DE TRANSMISIÓN, VELOCIDAD
DE SEÑAL y VELOCIDAD DE PROPAGACIÓN
Velocidad de transmisión: (Vt)
• Expresada en bits por segundo, bps (bits per
second), constituye la velocidad a la que se
transfiere la información o el número de bits que
se transmiten por unidad de tiempo.
• A la velocidad de transmisión también suele
denominarse: velocidad binaria, velocidad
numérica, tasa de bit (o bit rate).
• Si el tiempo de duración de un bit (período de
bit) es Tb segundos, la velocidad de transmisión
será el inverso del período de bit, esto es:
Vt = 1/Tb (bps)
BER (BIT ERROR RATE)
• TASA DE BITS ERRADOS (BER)
• Tasa a la cual los errores ocurren, donde un
error corresponde a la recepción de un 1
cuando un 0 fue transmitido y viceversa.
• Corresponde el BER entonces a la proporción
de bits errados respecto a los bits transmitidos
en un determinado intervalo de tiempo, así:
BER = Número de bits errados/ Número de bits transmitidos
• Así, si se tiene un bit errado en una transmisión
de 1000 bits promedio, el BER es10-³.
ALTERACIONES DE LA SEÑAL
Ruido
• Constituyen señales indeseables que se
introducen a lo largo del trayecto de transmisión.
• Se considera como ruido a aquella señal fortuita
e impredecible que altera la señal deseada,
generado por causas internas y externas al
sistema.
• Constituye uno de los principales factores que
limitan el desempeño de un sistema de
comunicaciones.
Ruido
Ruido generado por causas externas
• Es el ruido generado fuera del dispositivo o
medio de transmisión. Las fuentes principales
de ruido externo son:
• a.1) Ruido generado por el hombre o ruido
industrial,
más
intenso
en
áreas
metropolitanas pobladas e industriales• ruido generado por las luces fluorescentes, los
conmutadores en los motores eléctricos, etc.
• Con incidencia marcada en el rango de
frecuencias menores a 500 MHz.
Ruido
a.2) Ruido generado por la naturaleza
• a.2.1) Ruido atmosférico: generado por
disturbios eléctricos originados en la atmósfera
terrestre, con incidencia para frecuencias por
debajo de 20 MHz.
• a.2.2)
Ruido extraterrestre o espacial:
Originado fuera de la atmósfera de la tierra, a
veces llamado ruido generado por el espacio
profundo. Con incidencia en el rango de
frecuencias entre 8 MHz y 1.5 GHz. Dentro del
cual se tiene al ruido solar causado por el sol y
al ruido cósmico causado por otras estrellas.
Ruido
Ruido generado por causas internas
•
Generado dentro del dispositivo o medio de transmisión.
Dentro de esta categoría de ruido se tiene
esencialmente al ruido térmico o también denominado
ruido blanco o de Johnson, el cual se genera por el
movimiento aleatorio de los electrones en un conductor
o sistema electrónico debido a la temperatura, siendo
por tanto función de la temperatura.
•
La densidad de potencia No del ruido blanco es
constante para una temperatura dada, esto es:
No = KT (watts/Hz)
•
Donde K es la constante de Boltzman 1.38x10-23 J/°K y
T es la temperatura absoluta.
•
Dado que la densidad espectral de potencia es
constante y tiene todas las componentes de frecuencia
en igual proporción, se suele llamar a este ruido como
ruido blanco, por analogía con la luz blanca.
Ruido Térmico
• La potencia de dicho ruido, N, presente en
un ancho de banda de AB (Hz) es
directamente
proporcional
a
la
temperatura y al ancho de banda (AB) en
consideración, así:
N = KT AB
( watt)
• Donde K es la constante de Boltzman
1.38x10²³ J/°K y T es la temperatura
absoluta (°K).
EL CANAL DE TRANSMISIÓN: ANCHO DE
BANDA, S/N y CAPACIDAD
Ancho de Banda
•
•
•
Una de las características fundamentales de un canal
de transmisión es su ancho de banda, pues éste
determina la capacidad del canal para permitir el paso
(más fielmente) de un rango de frecuencias,
estableciéndose una relación de proporción directa
entre el ancho de banda del canal y su capacidad para
transmitir los datos.
Todos los canales de transmisión en la práctica tienen
un ancho de banda limitado y su costo depende del
mismo.
Dado un canal con un determinado ancho de banda,
se deberá usarlo de la forma más eficiente, esto es
tratando de lograr la máxima velocidad para un límite
de tasa de error (BER, Bit Error Rate).
EL CANAL DE TRANSMISIÓN: ANCHO
DE BANDA, S/N y CAPACIDAD
Relación Señal a Ruido (S/N)
•
•
•
Como se indicó en la sección anterior existen varias
anomalías (ruido, interferencia y distorsión) que
contaminan a una señal que viaja por un determinado
canal de transmisión. Estas anomalías afectan a la
velocidad de transmisión de los datos, dentro de ellas
la más crítica es el ruido.
A un nivel de potencia de ruido dado, N constante,
mientras mayor es la velocidad de transmisión de los
datos más alta es la tasa de bits errados (BER).
La potencia de la señal, S, es determinante en la
velocidad de transmisión, así, dada una determinada
relación S/N, la máxima velocidad de transmisión a la
que se puede transmitir dicha señal dependerá del
valor de S/N.
EL CANAL DE TRANSMISIÓN: ANCHO
DE BANDA, S/N y CAPACIDAD
Teorema de Hartley Shannon
• Este teorema establece que la capacidad (máxima
velocidad de transmisión) de un canal ruidoso depende
de la relación S/N y del ancho de banda AB del canal,
de acuerdo a:
C = AB log2 (1 + S/N)
[bps]
• Donde:
S/N = Relación señal a ruido numérica
AB = ancho de banda del canal
N = potencia de ruido blanco.
• Shannon estableció que si se transmite a una velocidad
de transmisión menor que la capacidad del canal,
teóricamente es posible usar un código de control de
errores adecuado para conseguir una transmisión libre
de errores a través del canal.
EL CANAL DE TRANSMISIÓN: ANCHO
DE BANDA, S/N y CAPACIDAD
• Ejemplo: Si se usa el canal telefónico
para transmitir datos vía módem, donde
una relación S/N típica es de 30dB, la
máxima tasa de transmisión permisible
será:
• AB 4KHz
• S/N = 30 dB = 1000
• C = 4 x 10³ log2 (1+1000) 40 Kbps
Relación de Nyquist
• En un canal ideal sin ruido (S/N =), de determinado
ancho de banda, la capacidad del canal teórica es , es
decir que no habría límite en la máxima velocidad de
transmisión. Sin embargo, en estas condiciones el límite
es impuesto por las características de la señal, más
concretamente por el ancho de banda de la señal. Una
formulación de esta limitación la constituye la
denominada relación o tasa de Nyquist.
Caso binario:
• Dada una señal binaria con un ancho de banda AB,
según Nyquist, la máxima velocidad de transmisión que
se puede lograr con dicha señal es 2AB. Esto es:
Vt máx = 2AB [bps]
Relación de Nyquist
Caso multinivel:
•
Si se usan señales de más de 2 niveles, cada
elemento de señal (símbolo) puede transportar más de
un bit. Ej. Con 4 niveles se puede representar 2 bits
por símbolo. Con una señal multinivel, de M niveles, la
formulación de Nyquist llega a ser:
Vtmáx = 2AB log2 M [bps]
•
Donde:
M = número de niveles de la señal, M = 2m.
m = número de bits por símbolo.
Aumentando M se puede incrementar la velocidad de
transmisión, pero el ruido y otras alteraciones en el
canal de transmisión limitan en la práctica el valor de
M.
Eficiencia espectral o densidad
de información: ()
• Mide que tan eficientemente se utiliza un
determinado ancho de banda disponible
para transmitir por él información y está
dada por la relación Vt/AB, esto es, la
eficiencia espectral mide los bps por hertz
que se transmiten.
= Vt/AB
[bps/Hz]
ENERGÍA DE LA SEÑAL POR BIT / DENSIDAD
DE POTENCIA DE RUIDO POR HERTZ [Eb/No]
• Este parámetro permitirá también relacionar la
S/N con la velocidad de transmisión y el BER.
• Se puede llegar a demostrar que:
Eb/No = (S/Vt)/No = S/KTVt
•
•
•
•
Donde: S = potencia de la señal (watt)
Vt = velocidad de transmisión (bps)
N0= densidad de potencia del ruido (watt/hertz)
K =
constante de Boltzmann = 1.38 x 10-23
(Joules/°K)
• T = temperatura en grados Kelvin
ENERGÍA DE LA SEÑAL POR BIT / DENSIDAD
DE POTENCIA DE RUIDO POR HERTZ [Eb/No]
• N0, la densidad de potencia de ruido, representa
la cantidad de ruido presente en un ancho de
banda de 1 hertz. Este parámetro se relaciona
con la potencia de ruido N, que representa la
cantidad de ruido presente en un ancho de
banda AB, de la siguiente manera;
• N = N0 AB
• Eb/N0 = (S/N)/
• =(S/N)/(Eb/N0)
ENERGÍA DE LA SEÑAL POR BIT / DENSIDAD
DE POTENCIA DE RUIDO POR HERTZ [Eb/No]
• Ejercicio:
• Si en un sistema de comunicaciones se requiere una
relación Eb/N0 de 8.4 dB para conseguir un BER de 10-4
y si la temperatura ambiente es de 290°K y la velocidad
de transmisión de 2400 bps, determinar el nivel
requerido de la señal recibida, tanto en dBW como en
W.
• 8.4 (dB) = S (dBW) – 10 log 2400 + 228. 6 – 10 log 290
• 8.4 dB = S (dBW) – 10(3.38) + 228.6 – 10 (2.46)
• S (dBW) = -161.8
• S = 6.607 x 10 -17 W.
V. TRANSMISIÓN CON PORTADORA:
MODULACIÓN DIGITAL
• Los datos son transmitidos usando una señal
portadora (sinusoide), la cual es modulada de
acuerdo a la información digital (señal en
banda base) que se desea transmitir.
• En el lado del receptor mediante el proceso de
demodulación la señal recibida es convertida
nuevamente al formato digital.
• El espectro de la señal original (en banda
base) luego de la modulación se traslada
desde la gama de frecuencias en banda base a
la gama de frecuencias de la onda portadora,
la cual es generalmente una señal de alta
frecuencia.
MODULACIÓN DIGITAL
• El
utilizar
frecuencias
superiores
proporciona mayores anchos de banda
para la transferencia de la información, lo
cual redunda en una capacidad superior y
en el uso de antenas de menor tamaño.
• Así mismo usando modulación se puede
conseguir mayores alcances en la
transmisión y una radiación de la energía
mas efectiva.
MODULACIÓN DIGITAL
• La modulación digital es el proceso de introducir
en la amplitud, frecuencia, fase o una
combinación de estos parámetros de una Onda
Portadora (sinusoide), la información digital
(modulante) que se desea transmitir.
• La sinusoide que actúa de portadora tiene la
forma:
Ap Cos (Wpt + Φ)
• Ap: es la amplitud pico de la portadora
• Wp: es la frecuencia angular de la portadora
• Φ: es la fase de la portadora sin modular.
5.3 MODULACIÓN DE FASE (PSK)
• En la modulación PSK (Phase Shift Keying), es la
fase de la portadora la que cambia de acuerdo a la
señal de datos, en tanto que la amplitud y
frecuencia de la portadora modulada se mantienen
constantes.
• Constituye un tipo de modulación angular muy
eficiente.
• Ampliamente utilizada en radio digital,modems,
sistemas spread spectrum, etc. por sus
características
de
amplitud
constante,
insensibilidad a la distorsión de amplitud y buen
desempeño contra errores.
• Se tienen dos esquemas de modulación PSK, de
acuerdo a cómo se dan los cambios en la fase de
5.3.1 MODULACIÓN PSK
CONVENCIONAL
• En
PSK
convencional
la
información
(modulante) está en el valor absoluto de la fase
de la portadora modulada.
• La expresión matemática para una señal
modulada PSK, considerando una portadora de
amplitud pico unitaria y fase inicial nula, es:
SPSK(t) = Cos {Wp t + i}
i: fase de la portadora modulada, la misma que varía de
la forma:
i = [bM (t) . ]/2
• bM (t) = señal simétrica NRZ en banda base de M
niveles, que toma los valores ±1, ±3…..
• M = número de fases (potencia de 2)
• Wp = frecuencia angular de la portadora
• = 2/M = separación entre fases adyacentes de la
portadora modulada.
5.3.1.1 Modulación BPSK o 2-PSK
• En este caso se tienen dos fases diferentes
(M=2), asignándose una de ellas a los 1s y la
otra a los 0s.
• La separación entre fases adyacentes es de
180º, pues
= 2/M = .
• Conforme cambian los datos de entrada, la fase
de la portadora de salida (señal modulada) varía
entre dos ángulos que están 180º fuera de fase.
• En el dominio del tiempo la portadora modulada
para el caso BPSK se vería como lo muestra la
Figura siguiente.
Modulación BPSK o 2-PSK
Modulación BPSK o 2-PSK
• Es muy ilustrativo representar la portadora
modulada usando un diagrama de
constelación.
• En un diagrama de constelación cada
señal se representa por un punto, el cual
corresponde al extremo del vector
asociado en el diagrama fasorial.
• Tal diagrama para el caso BPSK se
muestra en la Fig. 5.7.
Diagrama de Constelación
BPSK
5.3.1.1 Modulación BPSK o 2-PSK
• La relación entre la velocidad de modulación
(Vm en baudios) y la velocidad de transmisión
(Vt en bps) para BPSK (M=2) es:
Vm = Vt/ log2 M = Vt
• El ancho de banda de una señal modulada
BPSK es el doble del de los datos.
ABBPSK = 2 ABBB
Modulación QPSK o 4-PSK
• Para una señal modulada QPSK el
número de fases correspondientes es 4
(pues M=4).
• Con cada fase se transmitirá dos bits y
éstas estarán separadas 90°, pues
= 2/M = /2.
• Cada símbolo (2 bits) diferente genera
una de las cuatro fases posibles.
• Para cada símbolo que entra a un
modulador QPSK, ocurre un cambio de
fase en la salida del modulador.
Modulación QPSK o 4-PSK
• La relación entre la velocidad de modulación
“Vm” y la velocidad de transmisión “Vt” en QPSK
será:
Vm (baudios) = Vt/ log2 M = Vt/2
• Una reducción en la velocidad de modulación
está asociada con una disminución en el ancho
de banda de la señal modulada.
• La forma de la señal modulada QPSK en el
dominio del tiempo sería como lo muestra la
Figura, en donde se presentan 4 fases
diferentes (+135°, +45°,-45° y -135°) cada una
de ellas asociada a una pareja de bits diferentes
(10, 11, 01 y 00 respectivamente).
Modulación QPSK o 4-PSK
Modulación QPSK o 4-PSK
5.3.3 Modulación 8PSK y 16 PSK
• Se requieren 8 y 16 fases diferentes
en cada caso, separadas 45º y 22.5º
respectivamente.
• En 8PSK con cada fase se transmiten
3 bits y en 16PSK con cada fase se
transmiten 4 bits.
• Para 8 PSK la velocidad de
modulación Vm es Vt/3; en tanto que
para 16 PSK Vm es igual a Vt/4.
Diagrama de Constelación
8PSK
MODULACIÓN DE FASE (M-PSK)
• El ancho de banda de las señales
moduladas M-PSK se reduce en la misma
proporción en la que se reduce la
velocidad de modulación.
• El espectro de una señal modulada MPSK tiene la misma forma que el de una
señal BPSK; sin embargo a medida que
aumenta el estado de la modulación (M),
el primer anulamiento del espectro se
reduce a 1/log2M(Tb).
ESPECTRO DE UNA SEÑAL MODULADA
M-PSK
MODULACIÓN DE FASE (M-PSK)
• A mayor número de estados de modulación (M),
la velocidad de modulación Vm disminuye, y
consecuentemente el ancho de banda de la
señal modulada, esto es:
Vm = Vt / log2 M
ABMPSK = ABBPSK/ log2 M
ABMPSK= Vt / log2 M
• Para una misma velocidad de transmisión, la
modulación 8-PSK ocupa la tercera parte de
ancho de banda que una señal B-PSK, en tanto
que una 4-PSK ocupa la mitad que una B-PSK.
MODULACIÓN DE FASE (M-PSK)
• La inmunidad de una modulación digital en
general, y de MPSK en particular, frente a las
perturbaciones como ruido, resulta mayor
cuanto más separadas están las fases.
• Si se incrementa M, manteniendo la S/N
constante, disminuye la separación entre fases
adyacentes, posibilitando mayores errores en
recepción; sin embargo, al subir M aumenta la
información contenida en la señal y disminuye la
velocidad de modulación y por ende el ancho de
banda requerido.
MODULACIÓN DE FASE (M-PSK)
• Dado que el error en cualquier sistema de
modulación digital está fundamentalmente
relacionado con la distancia entre puntos
adyacentes en el diagrama de constelación, en
un sistema MPSK la expresión general para la
distancia entre puntos adyacentes, d, es:
d= 2 Sen(/M)
• La inmunidad de la modulación MPSK frente a
ruido resulta mayor cuanto más separados
están los puntos en el diagrama de
constelación.
MODULACIÓN DE FASE (M-PSK)
• Resulta evidente que la tasa de bits errados
(BER) baja si aumenta el radio de la
circunferencia en la que se sitúan los puntos, sin
embargo el hacerlo implica aumentar la relación
S/N requerida, pero paralelamente si se
incrementa M aumentará la información
contenida en la señal y disminuirá la velocidad
de modulación y por ende el ancho de banda
requerido.
5.3.2 MODULACIÓN DIFERENCIAL PSK
(DPSK)
• Se tiene una modulación PSK diferencial
cuando la información está contenida en las
variaciones de la fase de la portadora
modulada, con respecto a la fase del estado
anterior.
• En una modulación DPSK cada símbolo
produce un incremento (salto) de fase en la
portadora, con respecto a la fase del estado
anterior.
• DPSK equivale a una modulación PSK en la que
para cada intervalo se toma como origen de
fases, la fase de la portadora del intervalo
anterior.
5.3.2 MODULACIÓN DIFERENCIAL PSK
(DPSK)
• La ventaja de usar modulación DPSK es que
para la demodulación no es necesario tener una
portadora de referencia, es decir no es
necesario recuperar una portadora coherente en
fase en el lado del demodulador. En lugar de
eso, se compara la fase de un determinado
estado de la señal con la fase del estado
anterior, la diferencia en fase de los dos estados
consecutivos determina la condición lógica de
los datos, pues DPSK codifica sólo los cambios
de fase y no la fase absoluta.
5.3.2 MODULACIÓN DIFERENCIAL PSK
(DPSK)
• Así por ejemplo, para DPSK binaria o B-DPSK,
el proceso de modulación correspondiente se
podría dar de acuerdo a la siguiente regla: La
fase de la señal modulada cambia cuando el bit
a transmitirse es un 0L y, se mantiene en la fase
anterior cuando es un 1L.
• Un modulador DPSK se puede implementar
anteponiendo
a
un
modulador
PSK
convencional un codificador diferencial (que
normalmente se realiza en base a una función
XOR negada).
5.3.2 MODULACIÓN DIFERENCIAL PSK
(DPSK)
• Se puede tener una modulación DPSK de
múltiples estados, esto es M – DPSK, en cuyo
caso casa estado (fase) de la portadora
modulada permitirá transmitir Log2 M bits y, en
donde la asignación de la fase correspondiente
de la portadora se realiza de acuerdo a la fase
del estado anterior.
• La ventaja principal de la modulación PSK
diferencial es que para el proceso de
demodulación no se necesita recuperación de
portadora.
5.4 MODULACIÓN DE AMPLITUD EN
CUADRATURA (QAM)
• Una modulación QAM (Quadrature Amplitude
Modulation) involucra la variación simultánea de
dos parámetros de la onda portadora: amplitud y
fase.
• La expresión matemática de una señal
modulada QAM es de la forma:
SQAM(t) = ri Cos{Wp t + i}
• ri está asociado con los cambios en amplitud de
la portadora modulada, en tanto que i está
asociado con los cambios en fase de la
portadora modulada.
• Es posible considerar a la modulación QAM
como una extensión de la modulación PSK.
5.4 MODULACIÓN DE AMPLITUD EN
CUADRATURA (QAM)
• En consecuencia se establecen dos canales (I y
Q)
en
cuadratura
completamente
independientes.
• Si se tienen 2 niveles en cada canal ( I y Q) se
tendría el caso de una señal 4 QAM que sería
idéntico al caso 4 PSK. Sin embargo, sistemas
QAM de mayor orden (M>4) son diferentes a los
sistemas de múltiples fases PSK.
• En contraste con la señal PSK, QAM no tiene
envolvente constante, pues en QAM los niveles
de
cada
canal
son
seleccionados
independientemente.
MODULACIÓN DE AMPLITUD EN
CUADRATURA (QAM)
• 4 QAM es idéntico al caso 4 PSK. Sin
embargo, sistemas QAM de mayor orden
(M>4) son diferentes a los sistemas de
múltiples fases PSK.
• En contraste con la señal PSK, QAM no
tiene envolvente constante, pues en QAM
varía la amplitud de la portadora
modulada.
• M-QAM es más robusta que M-PSK para
el mismo número de estados de
modulación.
Diagrama de Constelación
16QAM
MODULACIÓN DE AMPLITUD EN
CUADRATURA (QAM)
• La característica de comportamiento frente al
error de QAM y PSK es diferente.
• La distancia entre puntos adyacentes (se
consideran puntos adyacentes sólo aquellos
que están separados la distancia mínima) para
una señal modulada M-QAM es:
d = 1.4142/(L - 1)
• L = número de niveles en cada eje, usualmente
M = L 2.
MODULACIÓN DE AMPLITUD EN
CUADRATURA (QAM)
• Del análisis de las expresiones para la distancia
entre puntos adyacentes, se concluye que para
M>4, QAM tiene un mejor comportamiento
frente al error que PSK.
• Para un igual número de estados de
modulación, los espectros de PSK y QAM son
idénticos.
• En general, la modulación M- QAM da una tasa
de error (BER) menor que la M-PSK para la
misma relación S/N; y, esta última presenta un
comportamiento mejorado con respecto a la
modulación M-ASK.
VII MULTIPLEXACIÓN
• Usualmente dos estaciones que se comunican
no utilizan toda la capacidad del enlace que las
une, a fin de aumentar la eficiencia del sistema
es menester compartir tal capacidad, a este
principio se denomina multicanalización o
multiplexación.
• Una aplicación común de la multiplexación se da
en las comunicaciones a larga distancia, donde
los enlaces pueden llevar un gran número de
conversaciones o transmisiones de datos
simultáneamente usando multiplexación.
MULTIPLEXACIÓN
7.1 MULTIPLEXACIÓN POR DIVISIÓN DE
FRECUENCIA (FDM)
• Muy utilizada, por ejemplo en la transmisión analógica
de radio y TV.
• Permite la transmisión simultánea de varias señales,
cada una de ellas ocupando una banda de frecuencia
diferente.
• FDM es posible utilizar cuando el ancho de banda del
canal de transmisión, excede el ancho de banda
requerido por las señales a transmitirse.
• Varias señales se pueden transportar simultáneamente
si cada una de ellas se modula con una subportadora de
frecuencia adecuada y, la banda de frecuencia ocupada
por cada señal modulada está lo suficientemente
separada como para no sobrelaparse con la banda
ocupada por la señal modulada con la subportadora
adyacente.
MULTIPLEXACIÓN POR DIVISIÓN DE
FRECUENCIA (FDM)
• Así por ejemplo, si se tienen N señales (m1(t),
m2(t), m3(t), …. mN(t)), cada una de ellas se
modula con frecuencias de subportadora
diferentes (fsc1,fsc2,fsc3,….fscN) y a cada señal
modulada (utilizando cualquiera de las técnicas
de modulación estudiadas) se le asigna un
cierto ancho de banda centrado alrededor de su
correspondiente frecuencia subportadora (AB1,
AB2, AB3,….ABN) al cual se le denomina canal o
ranura de frecuencia.
• Para prevenir interferencias entre canales
adyacentes se deben dejar bandas de guarda,
las cuales son porciones del espectro que no se
las utiliza para transmisión, pero que se las
debe considerar por precaución.
MULTIPLEXACIÓN POR DIVISIÓN
DE FRECUENCIA (FDM)
MULTIPLEXACIÓN POR DIVISIÓN DE
FRECUENCIA (FDM)
• Se suman las señales moduladas para producir
la señal compuesta o señal de banda base.
• La señal de banda base puede después ser
transmitida en forma directa o empleada para
modular una portadora de frecuencia fc.
• La recuperación de cada una de las señales se
hace en tres pasos:
MULTIPLEXACIÓN POR DIVISIÓN
DE FRECUENCIA (FDM)
• (1) el demodulador de portadora
reproduce la señal de banda base
• (2) se separan las subportadoras
moduladas por medio de un banco de
filtros pasabanda en paralelo con la banda
pasante de cada uno de ellos centrada en
las frecuencias fsc1, fsc2, fsc3 …. FscN.
• (3) se demodulan cada una de las señales
m1(t), m2(t), m3(t),…. mN(t)
MULTIPLEXACIÓN FDM
MULTIPLEXACIÓN POR DIVISIÓN
DE FRECUENCIA (FDM)
• En la Figura siguiente se representa, de
forma muy esquematizada, un conjunto
multiplexor-demultiplexor por división de
frecuencia para tres canales, cada uno de
ellos con el ancho de banda típico del
canal telefónico analógico (0,3 a 3,4 kHz).
MULTIPLEXACIÓN POR DIVISIÓN
DE FRECUENCIA (FDM)
MULTIPLEXACIÓN POR DIVISIÓN DE
FRECUENCIA (FDM)
• En esta figura, se puede ver como la señal de cada uno
de los canales modula a una portadora distinta,
generada por su correspondiente oscilador (O-1 a O-3).
A continuación, los productos de la modulación son
filtrados mediante filtros paso banda, para seleccionar la
banda lateral adecuada (BLU). En el caso de la figura se
selecciona la banda lateral inferior. Finalmente, se
combinan las salidas de los tres filtros (F-1 a F-3) y se
envían al medio de transmisión que, en este ejemplo,
debe tener una de banda de paso comprendida, al
menos, entre 8,6 y 19,7 kHz.
MULTIPLEXACIÓN POR DIVISIÓN DE
FRECUENCIA (FDM)
• En el extremo distante, el demultiplexor
realiza la función inversa. Así, mediante
los filtros F-4 a F-6, los demoduladores D1 a D-3 (cuya portadora se obtiene de los
osciladores O-4 a O-6) y finalmente a
través de los filtros paso bajo F-7 a F-9,
que nos seleccionan la banda lateral
inferior, volvemos a obtener los canales
en su banda de frecuencia de 0,3 a 3,4
kHz.
7.2 MULTIPLEXACIÓN POR
DIVISIÓN DE TIEMPO (TDM)
• Los sistemas portadores de larga distancia
fueron diseñados para transmitir voz sobre
enlaces de transmisión de alta capacidad
(fibra óptica, coaxial o microondas)
basados en una multiplexación TDM.
• TDM es una técnica para transmitir varias
señales simultáneamente sobre un mismo
enlace, para el efecto se divide el dominio
del tiempo en ranuras, asignándose una
ranura de tiempo a cada señal.
7.2 MULTIPLEXACIÓN POR
DIVISIÓN DE TIEMPO (TDM)
• La multiplexación TDM es posible cuando
la velocidad de transmisión disponible del
canal excede la velocidad de las señales
digitales a transmitir.
• Por ej, para multiplexar 4 entradas, cada
una de 10Kbps, se requiere un único
enlace de al menos 40Kbps.
• Múltiples señales digitales pueden ser
transportadas sobre una única vía de
transmisión intercalando porciones de
cada señal en el tiempo. El intercalado
puede hacerse a nivel de bit, byte o
bloques más grandes.
7.2 MULTIPLEXACIÓN POR DIVISIÓN DE
TIEMPO (TDM)
• La velocidad de la señal multiplexada debe ser al
menos igual a la suma de las velocidades de las
señales que ingresan al multiplexor.
• La señal digital multiplexada puede ser
transmitida directamente o modulada previo a su
transmisión.
• Los datos son organizados en tramas. En cada
trama, uno o más slots (ranuras o intervalos) de
tiempo son destinados a cada señal de entrada.
• La secuencia de slots dedicados a una señal, de
trama a trama, es llamado un canal.
MULTIPLEXACIÓN POR DIVISIÓN DE
TIEMPO (TDM)
1 2 ...... N ...... 1 2 ...... N .........
Fig.5.13 Trama conformada por N slots de tiempo
7.2 MULTIPLEXACIÓN POR DIVISIÓN DE
TIEMPO (TDM)
• En el receptor, los datos intercalados
(multiplexados) son demultiplexados y
enrutados al buffer de destino
apropiado.
• Para cada señal de entrada hay una
señal de salida idéntica, la cual
recibirá los datos de entrada a la
misma velocidad a la cual fueron
generados.
7.2 MULTIPLEXACIÓN POR
DIVISIÓN DE TIEMPO (TDM)
• En TDM se divide el tiempo en slots de tiempo,
asignándose uno o más slots de tiempo a cada señal.
• Durante ese(esos) slot(s) de tiempo asignado(s) a una
señal, ésta ocupa todo el ancho de banda disponible,
pero no se genera interferencia, pues durante ese(esos)
intervalo(s) de tiempo sólo se transmite esa señal.
• FDM y TDM son por tanto técnicas duales, así en TDM
las señales están separadas en el dominio del tiempo,
pero mezcladas en frecuencia, mientras que en FDM las
señales están separadas en el dominio de la frecuencia
pero mezcladas en tiempo.
7.2 MULTIPLEXACIÓN POR
DIVISIÓN DE TIEMPO (TDM)
7.2 MULTIPLEXACIÓN POR
DIVISIÓN DE TIEMPO (TDM)
• A este método de multiplexación en tiempo descrito se
le suele denominar como TDM sincrónico, no porque
utilice transmisión sincrónica, sino porque los slots de
tiempo son preasignados a las diferentes señales. Los
time slots para cada fuente son transmitidos así no haya
habido datos a enviar de la señal correspondiente (slots
vacíos), en cuyo caso la capacidad disponible es
desperdiciada aunque su implementación es simple.
• Una mejora a este problema es la multiplexación TDM
estadístico, en la cual la asignación de slots a cada
señal no es fija sino dinámica, de acuerdo a la demanda,
esto es de acuerdo a los requerimientos de cada señal
de entrada al multiplexor.
7.2 MULTIPLEXACIÓN POR
DIVISIÓN DE TIEMPO (TDM)
• Los sistemas portadores de larga distancia fueron diseñados para
transmitir voz sobre enlaces de transmisión de alta capacidad (fibra
óptica, coaxial o microondas) basados en una multiplexación TDM.
• Así, las palabras PCM de 8 bits de las señales telefónicas se
pueden transmitir sucesivamente en forma cíclica: pues entre 2
palabras PCM de una señal telefónica se intercalan en serie
cronológica las palabras PCM de otras señales telefónicas,
obteniéndose así señales TDM-PCM.
• El tiempo que tarde en transmitir una palabra PCM constituye un
intervalo de tiempo (time slot). El tren de bits que contiene una
palabra PCM de cada señal de entrada se denomina trama. Así por
ejemplo si una trama se compone de 4 palabras PCM consecutivas,
cada una de ellas asociadas a las señales de entrada S1 S2 S3 S4
correspondientes a los usuarios 1, 2, 3 y 4.
JERARQUIAS DIGITALES
PLESIOCRONAS, PDH
Los sistemas PDH (Plesyochronous
Digital Hierarchy) conjugan señales PCM
con una multiplexación TDM. Utilizados
originalmente para transportar múltiples
canales vocales y hoy en día para
transportar también datos. Básicamente
se tienen tres estándares: Europeo,
americano y japonés
SISTEMA DE TRANSMISIÓN PCM DE
30 CANALES: PCM 30 o E1
• Propuesto por CEPT. Estándar europeo
• Recomendación G732 del ex CCITT,
funciona a 2.048 Kbps
• Agrupa 30 canales formando un sistema
multiplex de tiempo
• Sistema de transmisión primario o de
primer orden.
• Usado en Europa y Sudamérica
(Ecuador).
Propiedades:
• Frecuencia muestreo = fs = 8KHz
• # muestra por segundo = 8000
muestras/ seg
• Período de una trama: 1/8000 = Ts =
125 µs.
• #bits por palabra PCM = 8 bits
• Velocidad binaria de un canal:
8000 muest /seg*8bits/muestra =
64Kbps
• Conversor A/D: Ley A, 13 segmentos
Propiedades:
• # intervalos de tiempo de canal por
trama: 32 (intervalos del 0 al 31)
• # bits por trama: 32x8=256
bits/trama.
• Duración de un intervalo de tiempo
de canal de 8 bits:
125µsx8bits/256bits=3.9µs.
• Velocidad de la señal multiplex PCM:
256bits/trama*1trama/125us
=2.048Kbps.
SISTEMA DE TRANSMISIÓN PCM DE
30 CANALES: PCM 30 o E1
• Por cada canal se transmiten 8000
muestras por segundo en forma de
palabras PCM de 8 bits cada uno; es decir
en un período de 125µs, se transmite
sucesivamente 30 palabras PCM de 8 bits
cada una correspondientes a 30
conversaciones telefónicas más dos
palabras PCM de 8 bits cada (una para
señalización y otra para alternativamente
señal de alineación de trama y señal de
alarma), esto es:
SISTEMA DE TRANSMISIÓN PCM DE
30 CANALES: PCM 30 o E1
PCM 30 o E1
• En una trama PCM 30 habrán por tanto 32
ITC (Intervalos de tiempo de canal),
numerados del ITC0 al ITC31, de los
cuales 30 corresponden a conversaciones
telefónicas
y
dos
a
señalización/sincronismo/alarma.
• La estructura de una trama PCM30 se
muestra a continuación:
PCM 30 o E1
• a) Señal de alineación de trama/alarma:
intervalo de tiempo del canal 0 (ITC 0).
• Basándose en las señales entrantes de
alineación de trama se determina la
posición del tiempo de la palabra PCM,
para que los bits recibidos puedan
asignarse en la secuencia correcta a los
diferentes circuitos vocales.
PCM 30 o E1
• En el intervalo de tiempo del canal 0 se
transmite alternadamente la señal de
alineación de trama y la señal de alarma
así:
• Alineación de trama:
• Va en las tramas pares 0,2,4,…14 (en el
intervalo de tiempo del canal cero).
PCM 30 o E1
• El contenido del ITC0 para las tramas
pares es:
• El bit X se utiliza en control de errores
• Los 7 bits últimos constituyen la PAM
(palabra de alineación de trama)
PCM 30 o E1
• Alarma:
• Va en las tramas impares 1,3,5..,15 (en el
intervalo de tiempo del canal 0)
PCM 30 o E1
• 1º bit X: Reservado para uso
• 2º bit 1: Evita la simulación de la señal de
alineación de trama.
• 3º bit D: Fijado internacionalmente para
indicación de alarma urgente
D=0: no existe alarma urgente.
D=1 existe alarma urgente.
PCM 30 o E1
• 4º bit N: Fijado internacionalmente para
indicación de alarma no urgente
N=0: existe alarma no urgente.
N=1 no existe alarma no urgente.
• 5º a 8º bit YYYY: Reservado para uso
nacional, bits de alarma.
PCM 30 o E1
Los bits C se usan par enviar una trama de control de redundancia cíclica
CRC4 que actúa como bits de paridad para el control de la tasa de errores
de secuencia:
C1 0 C2 0 C3 1 C4 0 C1 1 C2 1 C3 E C4 E
donde la secuencia 001011es la palabra de alineamiento para la trama
CRC. C1,C2,C3,C4, se calculan mediante el criterio de redundancia cíclica
como bits de paridad para la detección de errores.
Los bits E actúan como alarma remota de recepción de errores. Una
multitrama tiene dos secuencia CRC3, por tanto se disponen de dos bits E.
El polinomio generador de bits de paridad es x 4 x 1 .Se efectúan 1000
comparaciones CRC4 por segundo.
PCM 30 o E1
• b) Señalización: intervalo de tiempo del
canal 16 (ITC 16).
• La señalización de conmutación telefónica
se transmite en el intervalo de tiempo del
canal 16.
• Se puede tener dos tipos diferentes de
señalización:
a) Señalización asociada al canal para
30 canales vocales (CAS ó R2-digital)
b) Señalización por canal común a 64
Kbps (CCS ó SS No7)
PCM 30 o E1
• Señalización asociada al canal:
• Se subdivide el intervalo de tiempo16 de
tal manera que para cada uno de los 30
canales haya disponibles ciertos bits. Para
ello se agrupan 16 tramas formando
multitramas.
Una multitrama = 16 tramas
• Al principio de la multitrama se transmite
una señal de alineación de multitrama en
el ITC 16 de la trama 0: 0000.
PCM 30 o E1
PCM 30 o E1
• Cada intervalo de tiempo del canal 16 de
una multitrama se divide en dos grupos de
4 bits (a,b,c,d). En cada multitrama a cada
una de los 30 canales se le asigna para
señalización uno de dichos grupos abcd
de 4 bits.
PCM 30 o E1
• 0000: Palabra de alineación de multitrama
de señalización.
• X: Reservados, fijados a 1 si no se los
utiliza.
• Nótese que cada grupo abcd para
señalización por canal nunca deberá se
igual a la combinación 0000, esto se logra
asignando el valor 1 al 4º bit XXX1.
• Y: bit para indicar pérdida de alineación de
multitrama.
PCM 30 o E1
• Señalización por canal común:
• Cuando no se transmite señalización
asociada al canal, el intervalo de tiempo
16 (64Kbps) queda disponible para
transmitir señalización por canal común a
64 Kbps.
SISTEMA DE
TRANSMISIÓN PCM 24
• Propuesto por AT&T
• Agrupa 24 canales formando un sistema
multiplex de tiempo.
• Sistema de transmisión primario o de
primer orden del estándar americano y
japones.
• Usado en USA y Japón.
Propiedades:
• Frecuencia de muestreo = fs = 8KHz.
Período de una trama: Ts=125 µs.
• # bits por palabra PCM = 8 bits
• Velocidad binaria de un canal: 64Kbps.
• # intervalos de tiempo del canal (ITC) por
trama: 24.
• # bits por trama: 8*24+1=193bits/trama.
Propiedades
• Duración de un intervalo de tiempo del
canal de 8 bits:
125 µs x 8bits/193bits = 5.2 µs.
• Velocidad de la señal multiplex PCM:
193bits/trama*1trama/125 µs
=1.544Kbps.
SISTEMA DE
TRANSMISIÓN PCM 24
• Por cada canal se transmiten 8000
muestras por segundo en forma de
palabras PCM de 8 bits. En períodos de
125µ s, se transmiten sucesivamente 24
palabras PCM de 8 bits cada una,
correspondientes a 24 conversaciones
telefónicas.
• Trama = 24 canales telefónicos +1bit
•
24 *8+1=193 bits
SISTEMA DE
TRANSMISIÓN PCM 24
SISTEMA DE
TRANSMISIÓN PCM 24
SISTEMA DE
TRANSMISIÓN PCM 24
• El bit adicional se usa o bien para
transmitir alternadamente la señal de
alineación de trama y la señal de
alineación de multitrama, ó para transmitir
alternativamente la señal de alineación de
trama y la señalización por canal común.
SISTEMA DE
TRANSMISIÓN PCM 24
• a) Señal de alineación de trama/alarma:
• Provista por un primer bit de todas las
tramas impares.
• Tal como se muestra en la siguiente
tabla, la señal de alineación de trama es
101010…
SISTEMA DE
TRANSMISIÓN PCM 24
SISTEMA DE
TRANSMISIÓN PCM 24
• b) Señalización
• En el sistema PCM 24 se dispone
igualmente de dos tipos de señalización:
Señalización asociada al canal para 24
canales telefónicos
Señalización por canal común a 4
Kbps.
• Para la sincronización se usa la señal de
alineación de multitrama contenida en los
primeros bits de las tramas pares.
SISTEMA DE
TRANSMISIÓN PCM 24
• Señalización asociada al canal para 24
canales:
• Cada sexta trama se toma el bit menos
significativo de entre los 8 bits de cada
palabra PCM
de las 24 señales
telefónicas El bit menos significativo se
emplea para la señalización dentro del
intervalo de los canales telefónicos
correspondientes.
SISTEMA DE
TRANSMISIÓN PCM 24
• El CCITT denomina A y B a los dos
canales de señalización independientes
por canal telefónico.
• La velocidad binaria total para la
señalización asociada al canal es
1.333bps por canal telefónico
• Se transmiten 2 bits de señalización para
cada canal, cada 1.5ms =1.3 Kbps.
SISTEMA DE
TRANSMISIÓN PCM 24
• Señalizacion por canal comun:
• Aquí no se combinan las tramas para
formar multitramas.
• Los primeros bits de cada trama par no se
usan para la señal de alineación de
multitrama, sino para señalización como
se muestra en la tabla siguiente.
• Los bits S constituyen el canal común
usado para la señalización entre dos
centrales.
SISTEMA DE
TRANSMISIÓN PCM 24
SISTEMAS DE TRANSMISIÓN PCM
DE ALTA CAPACIDAD
• UIT-T recomienda 3 series diferentes de
jerarquías de multiplexaje digital, dos basadas
en la velocidad de 1544 Kbps (T1) y la tercera
se basa en la velocidad de 2048 Kbps, así:
• Las señales de los equipos de multiplexación
PCM y de otras fuentes de señales digitales
pueden agruparse en velocidades binarias más
altas de los niveles jerárquicos inmediatos,
dando lugar a sistema PCM de mayor
capacidad.
• La tabla adjunta indica cómo se van
conformando las jerarquías PDH de mayor
capacidad.
SISTEMAS DE TRANSMISIÓN PCM
DE ALTA CAPACIDAD
SISTEMAS DE TRANSMISIÓN
PCM DE ALTA CAPACIDAD
SISTEMAS DE TRANSMISIÓN
PCM DE ALTA CAPACIDAD
SISTEMAS DE TRANSMISIÓN
PCM DE ALTA CAPACIDAD
SISTEMAS DE TRANSMISIÓN PCM
DE ALTA CAPACIDAD
• En la jerarquía europea de multiplexación
de
señales
digitales
se
agrupan
respectivamente cuatro señales digitales
(4 tributarios de orden inferior) para
generar una nueva señal multiplex de
mayor velocidad.
• Así un sistema E2 (segunda jerarquía) del
estándar europeo tiene capacidad para
transportar
120
conversaciones
telefónicas, un E3 480 y un E4 1920.
SISTEMAS DE TRANSMISIÓN PCM
DE ALTA CAPACIDAD
• Las velocidades binarias de los 4 sistemas
tributarios tienen un margen de tolerancia,
por lo que no son síncronas y se dice que
son plesiócronas.
• Para la adaptación de estas 4 señales
plesiócronas al reloj del sistema multiplex
se hace uso de una técnica de
justificación o relleno.
SISTEMAS DE TRANSMISIÓN PCM
DE ALTA CAPACIDAD
• El proceso de multiplexación es
transparente a la organización de la trama
de orden jerárquico inferior, es decir la
información del tributario de entrada solo
debe cumplir con los requisitos de
velocidad, nivel y código, sin importar la
organización interna de los datos.
• La tabla adjunta indica cuáles son estos
requisitos para el sistema PDH europeo
SISTEMAS DE TRANSMISIÓN PCM
DE ALTA CAPACIDAD
SISTEMAS DE TRANSMISIÓN
PCM DE ALTA CAPACIDAD
• La justificación pone a disposición de una
señal de entrada, un canal de transmisión
con capacidad mayor que la velocidad
binaria nominal de la señal de entrada (
0.2%).
• Así entonces la frecuencia de lectura del
mux se elige mayor de lo que puede ser la
frecuencia del sistema.
SISTEMAS DE TRANSMISIÓN
PCM DE ALTA CAPACIDAD
•
Con la frecuencia de reloj mayor se
garantiza que se puedan transmitir todos
los bits entrantes, pero a causa de esto se
puede presentar de la situación en la que
hay que leer datos aunque no haya
nuevos datos inscritos.
• Para solucionar tal inconveniente se
insertan bits de relleno o justificación.
SISTEMAS DE TRANSMISIÓN
PCM DE ALTA CAPACIDAD
• El bit de relleno no aporta información útil.
• Para conocer si un determinado bit es un
“bit de relleno” en el receptor, éste lo hace
analizando la “información de control de
relleno”.
SISTEMA DE TRANSMISIÓN
E2
SISTEMA DE TRANSMISIÓN
E2
• Se agrupan 4 señales con velocidades
binarias de 2.048Mbps en una señal de
8.448 Mbps. Se ha convenido una trama
de 848 bits, de forma que se pueda dividir
en 4 bloques de igual tamaño,
conteniendo cada uno 212 bits.
SISTEMA DE TRANSMISIÓN
E2
SISTEMA DE TRANSMISIÓN
E2
SISTEMA DE TRANSMISIÓN
E2
• En este caso, como en todos los casos de
multiplexado de señales digitales más
elevadas, las señales se entrelazan o
intercalan bit a bit.
• NI: bits de información útil (200 para el 1º
bloque).
SISTEMA DE TRANSMISIÓN
E2
• Al inicio de los bloques II, III, IV se tienen
4 bits de información de control para
relleno JSD. En el bloque IV luego de los
bits JSD se añaden 4 bits B, si hay relleno
los bits de relleno son B:
Hay relleno si la mayoría de bits JSD (2 bits
o más) son 1
No hay relleno si la mayoría de los bits JSD
son 0
SISTEMA DE TRANSMISIÓN
E2
• Si no hay relleno los bits B contienen
información útil. Nótese solamente se
puede tener 1 bit de relleno por cada
tributario dentro de una trama.
• Bloque II: 52 bits/trib.
• Bloque III: 52 bits/trib.
• Bloque IV: 52 bits/trib, si no hay relleno y
51 bits/trib, si hay relleno.
SISTEMA DE TRANSMISIÓN
E2
• El período de una trama E2 es:
TTr= =100.3us
• La
velocidad
de
transmisión
correspondiente:
• Vt= 8448Kbps > 4x2048Kbps = 8192 Kbps
(por el relleno)
SISTEMA DE TRANSMISIÓN
E2
Cada trama contiene :
• NI: Información útil ó carga útil.
• PAT: Información de alineación de trama.
• JSD: Información de control de relleno
para la adaptación del reloj
• B: Información útil o de relleno si lo hay.
SISTEMA DE TRANSMISIÓN
E2
• La velocidad de cada orden es levemente
superior al producto de la velocidad de
tributario por el número de entradas,
debido al agregado de información
adicional (over head).
• A estas jerarquías PDH se la denomina
plesiócrona porque el reloj usado en cada
nivel de multiplexación es independiente
de los otros niveles.
• SDH adopta un solo reloj para toda la red.
SISTEMA DE TRANSMISIÓN
E2
• Al multiplexor de 2º orden ingresan 4
tributarios de 2048 Kbps cada uno, cuya
velocidad tiene una tolerancia de 50 ppm
(equivalente a 102.4 bps).
• Al inicio de la trama se tiene un
encabezado (over head) con información
de alineamiento de trama, alarma, bits de
justificación”positiva”(stuffing) y bits de
control de justificación.
SISTEMA DE TRANSMISIÓN
E2
• La justificación “+” permite entrelazar 4
entradas denominados tributarios de
diferente velocidad dentro de la tolerancia
de 50ppm.
• Los datos provenientes de los tributarios
se entrelazan por bits de la zona
denominada carga útil de la trama.
SISTEMA DE TRANSMISIÓN
E2
• El proceso de multiplexación es
transparente a la organización de la trama
de orden jerárquico inferior, es decir la
información del tributario de entrada solo
debe cumplir con los requisitos de
velocidad, nivel y código, sin importar la
organización interna de los datos.