PDF, ~1,5 MB
Anuncio

APUNTES TELEDETECCIÓN
ING. TÉC. TOPOGRAFÍA
CURSO 2009/2010
Profesora: Inés Santé Riveira
1
ÍNDICE
TEMA 6: TRATAMIENTOS DE REALCE Y MEJORA BÁSICOS ............................. 3 1. HISTOGRAMA DE UNA IMAGEN .......................................................................... 3 2. AJUSTE DEL CONTRASTE ...................................................................................... 5 3. COMPOSICIONES COLOREADAS ........................................................................ 10 4. EMPLEO DEL SEUDO-COLOR .............................................................................. 13 5. FILTRAJES ................................................................................................................ 14 6. TRANSFORMACIONES PREVIAS. ÍNDICES ....................................................... 16
TEMA 7: TRATAMIENTOS DIGITALES AVANZADOS ......................................... 21 1. ANÁLISIS DE COMPONENTES PRINCIPALES ................................................... 21 2. TRANSFORMACIÓN TASSELED CAP (TTC) ...................................................... 29
TEMA 8: EXTRACCIÓN DE LA INFORMACIÓN .................................................... 33 1. FUNDAMENTOS ...................................................................................................... 33 2. FASE DE ENTRENAMIENTO ................................................................................. 34 3. CLASIFICACIÓN NO SUPERVISADA Y SUPERVISADA .................................. 35 4. MEDIDA DE LA SEPARABILIDAD ENTRE CLASES ......................................... 37 5. FASE DE ASIGNACIÓN .......................................................................................... 38 6. ALGORITMOS DE CLASIFICACIÓN .................................................................... 39
TEMA 9: VERIFICACIÓN DE RESULTADOS .......................................................... 46 1. FUENTES DE ERROR EN LA CLASIFICACIÓN TEMÁTICA ............................ 46 2. MEDIDAS DE FIABILIDAD .................................................................................... 47 3. DISEÑO DEL MUESTREO PARA LA VERIFICACIÓN ....................................... 48 4. RECOGIDA DE INFORMACIÓN ............................................................................ 51 5. MEDIDAS DEL ERROR PARA VARIABLES CONTINUAS................................ 52 6. MEDIDAS DEL ERROR PARA IMÁGENES CLASIFICADAS: MATRIZ DE
CONFUSIÓN ................................................................................................................. 52 7. ANÁLISIS ESTADÍSTICO DE LA MATRIZ DE CONFUSIÓN ............................ 53
TEMA 10: CARACTERÍSTICAS DE LOS SENSORES ACTIVOS: RADAR Y
LIDAR ............................................................................................................................ 57 1. INTRODUCCIÓN ...................................................................................................... 57 2. RADAR DE APERTURA SINTÉTICA (SAR)......................................................... 58 3. BANDAS DEL RADAR ............................................................................................ 59 4. APARIENCIA DE LAS IMÁGENES ...................................................................... 60 5. DISTORSIONES DE UNA IMAGEN RADAR ........................................................ 62 6. PROPIEDADES DE LAS IMÁGENES RADAR ..................................................... 63 7. ECUACIÓN RADAR ................................................................................................ 64 8. TIPOS DE RADARES ............................................................................................... 65 9. LIDAR ........................................................................................................................ 66
TEMA 11: TRATAMIENTOS PROPIOS DE IMÁGENES RADAR .......................... 70 1. REALCE RADIOMÉTRICO ..................................................................................... 70 2. ANÁLISIS DE TEXTURA ........................................................................................ 76 3. TÉCNICAS AVANZADAS ....................................................................................... 83 2
TEMA6:TRATAMIENTOSDEREALCEYMEJORABÁSICOS
En muchas etapas del proceso de elaboración de cartografía a partir de imágenes
satélite es preciso examinar visualmente la imagen. P. ej. para georreferenciarla es
preciso localizar puntos de control claves en la imagen. Es particularmente importante
en el caso de la interpretación visual.
En este tema vamos a ver las técnicas dirigidas hacia la mejora de la calidad
visual de la imagen. Tratan de disponer mejor los datos para su análisis visual, de forma
que sean más evidentes los rangos de interés de la imagen. En estas técnicas se incluyen
los procesos de mejora del contraste, composiciones coloreadas y filtrajes.
1.HISTOGRAMADEUNAIMAGEN
Una imagen está definida por su histograma, en el que se representa la
probabilidad de encontrar un determinado valor de ND en la imagen. El histograma de
una imagen describe la distribución de los valores de los píxeles (los ND) de la imagen.
Un histograma indica el número de píxels para cada valor, en otras palabras, el
histograma contiene las frecuencias de los valores de ND en una imagen. El histograma
puede representarse en forma tabular o gráficamente. La representación tabular
normalmente consta de 5 columnas:
ND: nivel digital, en el rango [0…255]
-
Npix: número de píxeles de la imagen con este ND (frecuencia)
-
Perc: frecuencia como porcentaje del número total de píxeles de la imagen.
-
CumNpix: número acumulado de píxeles en la imagen con valores menores o
iguales a ese ND.
-
CumPerc: frecuencia acumulada como porcentaje del número total de píxeles de
la imagen.
Los datos del histograma pueden ser posteriormente resumidos mediante algunas
estadísticas como: media, desviación estándar, mínimo y máximo, valor 1% que es
valor por debajo del cual sólo se encuentran el 1% de los valores, valor 99%. Los
valores 1% y 99% pueden ser usados para definir un rango óptimo para la visualización.
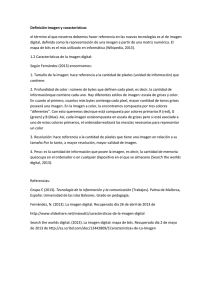
Ejemplo de histograma en forma tabular:
3
La representación gráfica muestra la curva de frecuencia acumulada, que
representa el porcentaje de píxeles con un ND igual o menor a un determinado valor.
4
2.AJUSTEDELCONTRASTE
Los sensores son calibrados para recibir un rango muy amplio de valores de
radiación. Sin embargo, en una imagen satélite puede haber sólo agua, vegetación, etc,
por lo que rango de valores de la imagen será mucho menor, habrá poca diferencia entre
el ND mínimo y el máximo. Con el realce radiométrico se busca un mayor contraste
visual.
El ajuste del contraste es un proceso que hace más fácilmente apreciables las
características de una imagen haciendo un uso óptimo de los colores disponibles para su
visualización.
Las imágenes son visualizadas normalmente usando una escala de grises. Los
grados de gris del monitor típicamente varían del negro (valor 0) al blanco (valor 255).
Si se usan los valores originales de la imagen para controlar los valores de grises del
monitor, normalmente resulta en una imagen con poco contraste porque sólo se usa un
número de valores de grises limitado. En la imagen del histograma anterior, solamente
sería usados 173-14=159 niveles de grises de los 255 disponibles. El rango de ND de la
imagen no coincide con el número de valores disponibles, por lo que se puede expandir
el contraste para hacer corresponder el rango de ND presentes en la imagen con el rango
de ND total disponible. Para optimizar el rango de valores de grises, una función de
transferencia convierte los valores de ND en niveles de grises del monitor. Esta función
5
de transferencia puede ser de distintas formas. Las funciones de transferencia son
implementadas como modificaciones de los valores de la colour look up table.
Tablas de referencia del color
La tabla de referencia del color (CLUT, Colour Look up Table) indica el nivel
visual, NV o nivel de gris, con el que se representa en la pantalla cada ND. En la mayor
parte de los equipos la tabla de color es una matriz numérica de 3 columnas por 256
filas (ya que el rango de codificación va de 0 a 255). De modo que el orden de la fila
indica de ND de entrada, y en la tabla se almacena el NV con el que se representará ese
ND, las tres columnas de la matriz corresponden a los 3 colores elementales. En el caso
de que se esté trabajando con una sola banda, lo normal es que la imagen se represente
en pantalla en tonos de grises. Esto significa que cada ND tiene el mismo componente
de rojo, verde y azul. Un NV de 0,0,0 indica que el ND al que se aplique será
visualizado como negro, mientras que 127, 127, 127, supone un gris medio y 255,255,
255 blanco. Si los tres valores son distintos se estará representando una imagen en
color.
NV (azul)
NV (verde)
NV (rojo)
0
0
0
1
1
1
2
2
2
3
3
3
…
…
…
127
127
127
…
…
…
255
255
255
Gracias a la CLUT no es preciso transformar los ND para modificar el contraste
visual de la imagen, lo que conllevaría perder la información original o aumentar las
necesidades de almacenamiento. Basta únicamente transformar la relación entre ND y
NV que incluye la CLUT.
Una forma alternativa de visualizar una imagen es usar una pseudo-colour
lookup table que asigna colores entre el azul via ciano, verde y amarillo al rojo. El uso
de pseudo-color es especialmente útil para visualizar datos que no son medidas de
reflexión, p ej, datos de infrarrojo térmico, la asociación de frío-caliente con azul-rojo es
más intuitiva que con oscuro-claro.
6
Expansión y comprensión del contraste
Pueden darse dos situaciones: 1) que el rango de ND de la imagen sea menor que
el de NV del monitor, 2) que la imagen presente un mayor número de ND que NV
posibles en el monitor. En el primer caso se deberá aplicar una expansión del contraste,
mientras que en el segundo una reducción del mismo. La expansión del contraste se
emplea rutinariamente en la mayor parte de las aplicaciones. Mientras que la
compresión del contraste, es está empleando para reducir el volumen de
almacenamiento de las imágenes y aprovechar los equipos de visualización de bajo
coste.
Expansión del contraste
El primer caso, la expansión del contraste, es el más habitual, ya que aunque la
resolución radiométrica de la mayor parte de los sensores actuales es de 8 bits por píxel,
en la práctica ninguna imagen aprovecha todo ese rango, ya que difícilmente en una sola
escena se encontrarán todos los posibles valores de radiancia para los que se calibró el
sensor. Visualmente esto implica que hay tonos de gris que no se utilizan, por lo que la
imagen se ve en el monitor con poco contraste. Es posible realzar el contraste diseñando
una tabla de color que haga corresponder el rango de ND presentes en la imagen con el
rango total de NV posibles. Si bien existe la posibilidad de realizar expansiones de
contraste de forma manual, las formas más habituales para realizar la expansión del
contraste son:
Expansión lineal del contraste
Es la forma más elemental de ajustar el contraste. El valor digital ND mínimo
del histograma se hace corresponder con el NV 0 (es el negro) y el máximo con el NV
255 (es el blanco), de modo que ocupe todo el rango de valores disponibles,
distribuyendo linealmente el resto de ND entre estos extremos mediante la siguiente
ecuación
NV
ND ND min
255
ND max ND min
De este modo se utiliza todo el rango de NV del monitor o dispositivo de salida.
En lugar de utilizar el ND mínimo y máximo también se pueden utilizar otros valores
menos extremos, como los percentiles del 95% y 5% o el 1 y el 99%, lo que permite que
tengan menos influencia los posibles valores anómalos de la imagen.
7
Expansión lineal restringida – los valores de NDmax y NDmin los decide el usuario en
lugar de corresponder a los valores reales de la imagen
Si NDmax>ND>NDmin NV
ND ND min
255
ND max ND min
Si NDmax<ND NV=255
Si NDmin>ND NV=0
Ecualización del histograma
Igual que en el caso anterior, se asigna al ND mínimo el NV 0 y al ND máximo
el NV 255, pero distribuyendo el resto de ND según una función cuadrática. En la
expansión lineal no se tiene en cuenta la frecuencia de los ND, aquí sí, se tiene más
realce en los ND más frecuentes. Se tiene en cuenta la forma del histograma, la
distribución real de los valores, es decir, no sólo se tiene en cuenta el valor de ND sino
que se aplica una expansión proporcional a la frecuencia de aparición de cada uno de los
ND. Esto implica crear una tabla de referencia de color en la cual cada NV tenga,
aproximadamente, el mismo número de ND de la imagen. Es decir, aquellos ND con
mayor número de píxeles serán los que ocupen un mayor rango de visualización.
El proceso es más laborioso que en el caso anterior.
1. Se calcula la frecuencia absoluta y acumulada de los ND de la imagen original.
2. Esta frecuencia se compara con una frecuencia objeto, que sería la que se
obtendría si todos los NV de la imagen tuvieran la misma frecuencia (es decir,
el cociente entre el número total de píxeles de la imagen y el número de niveles
visuales posibles). P ej, 736136píxeles/256NV=2875,53píxeles por cada NV, en
frecuencia relativa el 0,3906%.
3. De esta comparación se selecciona, para cada ND, el NV que presente un valor
más próximo en la frecuencia objeto acumulada.
Ajuste gaussiano
Supone el ajuste del histograma observado al histograma que aparecería si la
distribución fuera gaussiana, es decir si:
f ( x)
(x ) 2
1
exp
2
2
2
f(x) es la frecuencia de x, es la media y la desviación típica.
8
Expansión especial del contraste
Se realza aquella zona de la imagen que más interesa. Se restringe el contraste a
un rango específico de ND, en donde se manifieste con mayor claridad una cubierta de
interés. La expansión especial puede realizarse asignado como umbral mínimo y
máximo el rango de ND de la cubierta que pretende realzarse (es el método lineal), o
limitando el histograma objeto al rango donde está presente dicha cubierta (es el realce
frecuencial).
Expansión adaptada del contraste
Es semejante a la ecualización pero resulta una imagen menos contrastada
porque se realzan más los extremos del histograma.
Infrecuencia
Consiste en asociar al ND menos frecuente el nivel de gris más alto y viceversa.
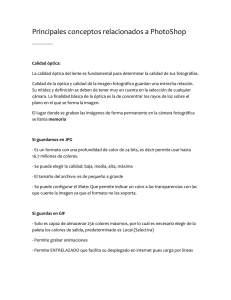
Imagen de Landsat TM sin mejora del contraste, con ecualización del histograma y
representación pseudo-color.
Comprensión del contraste
En el caso de que el rango del sensor supere el número de niveles de gris que
pueden visualizarse en pantalla, es necesario comprimir los ND originales. Este ajuste
es necesario en dos casos: 1) cuando se cuenta con un sistema gráfico de potencia
reducida, o 2) cuando se trabaja con un sensor de gran sensibilidad radiométrica (p. ej.
de 10 bits de AVHHRR, de 11 bits del Ikonos o de 16 bits de SAR).
9
Este problema se puede solucionar de dos formas: eliminando una parte de la
escala que no se considere relevante, o estableciendo una función de compresión de
datos. La primera solución es poco habitual porque supone una eliminación arbitraria de
datos. La segunda puede abordarse de distintas formas.
La forma más habitual es reducir el rango original de ND a un número
conveniente de intervalos. Estos intervalos suelen señalarse en función de las
características de la distribución de los ND. Pueden utilizarse intervalos de igual
anchura, a cada uno de los cuales se asigna un único NV.
Existen algoritmos de compresión más elaborados, que controlan el número de
intervalos mediante un proceso similar a la clasificación no supervisada.
Actualmente, la mayor parte de los equipos cuentan con tarjetas gráficas de
mucha mayor potencia, por lo que la comprensión de imágenes no se suele realizar,
salvo por problemas de almacenamiento. Además, en este caso se suelen utilizar
algoritmos de compresión del color, que consiguen una calidad apenas diferenciable de
la original, por ejemplo el algoritmo LZW, que permite crear imágenes GIF, el JPEG o
el PNG.
3.COMPOSICIONESCOLOREADAS
Percepción del color
La percepción del color tiene lugar en el ojo humano y en la parte asociada del
cerebro. No sé sabe exactamente cómo funciona la visión humana y qué sucede en los
ojos y el cerebro antes de que alguien decida que un objeto es azul. Sin embargo,
algunos modelos teóricos, soportados por resultados experimentales, son generalmente
aceptados. El ojo es sensible a longitudes de onda entre 400 y 700 nm. Diferentes
longitudes de onda en este rango son percibidas como colores distintos. La retina del
ojo tiene conos (receptores sensibles a la luz) que envían señales al cerebro cuando son
golpeados por fotones con niveles de energía que corresponden a las diferentes
longitudes de onda en el rango visible del espectro electromagnético. Hay tres clases
diferentes de conos, respondiendo al azul, verde y rojo. Las señales enviadas a nuestro
cerebro por estos conos, y las diferencias entre ellos, nos dan sensaciones de color.
Los equipos de visualización utilizan el proceso aditivo de formación del color,
basado en la mezcla por adición de los colores primarios. Una pantalla de televisión está
compuesta por un gran número de pequeños puntos compuestos por grupos de puntos
10
rojos, verdes y azules. El número de puntos encendidos determina la cantidad de luz
roja, verde y azul emitida. Todos los colores pueden ser creados mezclando diferentes
cantidades de rojo, verde y azul. Esta mezcla tiene lugar en nuestro cerebro. Cuando
vemos luz amarilla monocromática, que tiene una longitud de onda de 570nm, tenemos
la misma impresión que cuando vemos una mezcla de rojo, 700 nm, y verde, 530nm. En
ambos casos, los conos son estimulados de la misma forma, de acuerdo con el modelo
de tres-estimulos.
Composiciones coloreadas
Si tenemos en cuenta que el ojo humano es menos sensible a las tonalidades de
color gris que al cromatismo, la composición coloreada es quizás la técnica más
utilizada para resaltar los detalles de una imagen de satélite. Consiste en aplicar a tres
bandas diferentes los distintos colores elementales (rojo, verde, azul), de modo que se
puede apreciar información no distinguible de otro modo. Este proceso permite
visualizar, simultáneamente, información de distintas regiones del espectro, lo que
facilita la delimitación visual de algunas cubiertas.
La composición de color más obvia sería simular el color real asignando a la
banda del rojo el color rojo, a la del azul el azul y a la del verde el verde. Cuando se
aplica cada color a la banda del espectro que le corresponde se obtienen composiciones
en color verdadero. Sin embargo, no se suele aplicar a cada banda su color respectivo
por lo que se denominan composiciones de falso color.
La
composición
más
habitual
es
la
denominada
color
infrarrojo,
correspondiente a la aplicación de los colores rojo, verde y azul a las bandas del
infrarrojo cercano, rojo y verde respectivamente. El resultado es similar a la fotografía
infrarroja. Esta composición facilita la cartografía de masas vegetales, láminas de agua,
ciudades, etc, de ahí que se haya empleado ampliamente en diversos estudios de análisis
visual. La característica más peculiar de esta composición en falso color es que la
vegetación aparece de un color rojo púrpura. En la parte visible del espectro las plantas
reflejan la mayor parte de la luz verde pero su reflexión infrarroja es incluso mayor. Por
lo tanto, la vegetación en una composición en falso color aparece con una mezcla de
algo de azul, pero más rojo, resultando en un color rojizo púrpura.
Las combinaciones que visualizan el infrarrojo cercano como verde muestran la
vegetación de color verde, por eso se llaman composiciones en color pseudo-natural.
Dependiendo de la aplicación se pueden usar otras combinaciones de bandas. En
definitiva, estas composiciones sirven para resaltar los elementos que mayor
11
reflectividad presentan en las bandas utilizadas, además de obtener visualizaciones más
o menos estéticas. La elección de las bandas para realizar la composición, y el orden de
los colores destinados a cada una, dependen del sensor sobre el que se trabaje y de la
aplicación a la que se destine. Por ejemplo, para el sensor TM de Landsat se utilizan las
siguientes composiciones:
3/2/1 - información en color real
5/4/3 o 4/5/3 aplicándoles RGB – para estudios de usos del suelo, se ha utilizado en el
proyecto europeo Corine, en el que se obtuvo el mapa de suelos para toda Europa
4/7/5 – es utilizada para el seguimiento de zonas quemadas
7/4/3 – se emplea para el estudio de cultivos en regadío
7/3/1 – tiene aplicaciones oceanográficas
La elección de las bandas depende del sensor con el que se trabaje. En general
deben seleccionarse las bandas que presenten la mayor varianza, es decir, aquellas en
las que la dispersión de los datos sea la mayor posible, y el mínimo coeficiente de
correlación entre ellas, es decir, que la información proporcionada por cada una de las
bandas sea lo más independiente posible de las informaciones proporcionadas por las
restantes. Para establecer un criterio objetivo para seleccionar las bandas más adecuadas
para una composición de color se han propuesto unos índices estadísticos, como el
denominado ‘índice óptimo’ o Optimum Index Factor, OIF:
OIF
s
k
r
j
k 1,3
j 1,3
donde Sk es la desviación típica de cada una de las 3 bandas y rj es el coeficiente de
correlación entre cada par de esas bandas. Cuanto más alto sea este índice mayor será el
contenido informativo de la composición.
12
4.EMPLEODELSEUDO‐COLOR
Se ha demostrado que el ojo humano distingue mejor distintos tonos de color
que intensidades de brillo o niveles de grises, por lo que, el empleo de color puede
ayudar a interpretar una imagen, incluso si sólo se dispone de una banda. En este caso,
no se puede hablar propiamente de color, pues se requerirían 3 bandas, sino más bien de
seudo-color.
Para una mezcla de 3 bandas utilizamos distintos NV en cada cañón de color,
RVA. Sin embargo, también se puede diseñar una CLUT en donde varíen los NV para
los 3 colores aunque sólo haya una banda de entrada. Es decir, el pseudo-color implica
crear una CLUT que asocie el ND de una sola banda a distintos componentes de rojo,
verde y azul. Esto tiene sentido en 2 casos:
1 – Cuando se quiere obtener una clave de color en una imagen clasificada (cada color
una categoría). Cada ND indica una clase temática distinta (p ej un uso del suelo), que
será visualizada con un color distinto.
2 – Cuando se intente realzar el análisis de una determinada banda sustituyendo los
niveles de gris por tonos de color. P. ej., se puede diseñar una CLUT con tonos azules
para los ND bajos y rojos para los ND altos. Esto se aplica por ejemplo para la
visualización de imágenes de temperaturas (azul-rojo) o de índices de vegetación (color
ocre-verde).
13
5.FILTRAJES
Otro componente de la imagen es el contraste espacial, que es la diferencia
entre el ND de un píxel y el de sus vecinos. Mediante las técnicas de filtraje se pretende
suavizar o reforzar estos contraste espaciales. Se filtra la imagen para suavizar o
reforzar los contrastes espaciales, es decir, para difuminarla o para resaltar determinados
aspectos, de modo que el ND de un píxel se diferencie o se asemeje más a los ND de los
píxeles que lo rodean.
Los filtros son transformaciones locales de la imagen: se calcula una nueva
imagen y el valor de un píxel dependerá de los valores de sus vecinos. El filtraje sí
implica modificar los ND originales y no sólo la forma en que se representan
visualmente. Los filtros consisten en aplicar a los ND de cada píxel una operación
aritmética que tenga en cuenta el valor de los píxeles próximos, estos son los filtros en
el dominio espacial.
Los filtros consisten en aplicar una matriz móvil de coeficientes de filtraje (CF)
(también se llama kernel), con un número impar de filas y columnas, sobre los ND de
los píxeles. Un filtro puede ser considerado como una ventana que se mueve a lo largo
de una imagen y considera todos los ND que caen dentro de la ventana. Cada valor de
un píxel es multiplicado por el coeficiente correspondiente del filtro. El valor resultante
sustituye al valor original del píxel central. La ventana se desplaza un píxel. Esta
operación se llama convolución. Cuanto mayor es el tamaño de la matriz mayor es el
efecto de suavizado o de realce del filtro.
El resultado de un filtro depende de los CF. Si estos tienden a ponderar el valor
central en detrimento de los circundantes, el píxel refuerza sus diferencias frente a los
vecinos (son los filtros de paso alto). Por el contrario, si los coeficientes favorecen a los
píxeles periféricos, el central se asemejará más a los adyacentes (son los filtros de paso
bajo). Por lo tanto, hay dos tipos de filtro:
a) Filtros de paso bajo
Difuminan la imagen, la suavizan, los contornos se hacen menos nítidos. Se
asemeja el ND de cada píxel al de los píxeles vecinos. Destacan el componente de
homogeneidad en la imagen. Estos filtros se emplean para eliminar errores aleatorios
que pueden presentarse en los ND de la imagen, también para reducir la variabilidad
espacial de algunas categorías como paso previo a la clasificación. En ambos casos, se
14
pretende atenuar el denominado ‘ruido de la escena’. El filtro de paso bajo puede
obtenerse a partir de diversas matrices de filtraje, algunas de las más habituales son:
1
1
1
1
1
1
0,25
0,5
0,25
1
1
1
1
2
1
0,5
1
0,5
1
1
1
1
1
1
0,25
0,5
0,25
El filtro media suaviza la imagen para eliminar el ruido, calcular la suma de
todos los píxeles del kernel y luego divide la suma por el número total de píxeles del
kernel.
En los últimos años se ha aplicado otro tipo de filtraje, basado en la mediana en
lugar de la media. El filtro mediano consiste en sustituir el ND del píxel central por la
mediana de los ND de los píxeles vecinos. La mediana es menos sensible a valores
extremos. Este filtro preserva mejor los contornos que el filtro promedio, pero resulta
más complejo de calcular ya que hay que ordenar los valores de los píxeles de la
ventana y determinar cuál es el valor central. Tiene la ventaja de que el valor final del
píxel es un valor real presente en la imagen y no un promedio, de este modo se reduce el
efecto borroso que tienen las imágenes que han sufrido un filtro de media.
La mediana es el valor medio en un conjunto ordenado.
El filtro moda calcula la moda de los valores, es decir, el valor más frecuente del
kernel.
El problema de los filtros de paso bajo es hacerlos sin que se pierdan entidades
interesantes.
b) Filtros de paso alto
Resaltan los bordes, los contornos de las áreas homogéneas. Desatacan los ND
que sobresalen entre los valores más comunes. Destacan las áreas de alta variabilidad.
Se remarcan los elementos lineales de las fronteras con respecto a los vecinos, se usan
más.
El filtro de paso alto más sencillo consiste en restar a la imagen original la
obtenida por un filtro de paso bajo. Aunque es más común emplear matrices de filtraje,
similares a las anteriores, pero en las que se refuerza más el contraste entre el píxel
central y los vecinos. Estos filtros calculan la diferencia entre el píxel central y sus
vecinos. Esto es implementado usando valores negativos para los coeficientes de los
píxeles no centrales. Por ejemplo las siguientes matrices:
15
-1
-1
-1
0
-1
0
-1
-1
-1
-1
9
-1
-1
4
-1
-1
16
-1
-1
-1
-1
0
-1
0
-1
-1
-1
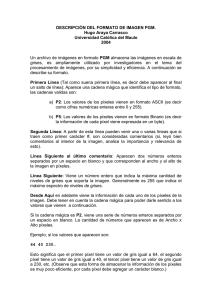
Filtro de paso alto – Imagen original – Filtro de paso bajo
6.TRANSFORMACIONESPREVIAS.ÍNDICES
Estas transformaciones previas consisten en operar la imagen con un valor
numérico: sumar, restar, multiplicar o dividir píxel a píxel varias imágenes. La
transformación previa más común son los cocientes o ratios entre dos o más bandas de
la misma imagen, que se utilizan ampliamente en dos situaciones:
1. Para mejorar la discriminación entre dos cubiertas con comportamiento
reflectivo muy distinto en dos bandas
2. Para reducir el efecto del relieve
Estos índices se emplean principalmente para mejorar la discriminación de las
cubiertas vegetales y estimar algunas de sus variables biofísicas. Un índice de
vegetación es un “parámetro calculado a partir de los valores de la reflectividad a
distintas longitudes de onda y que pretende extraer de los mismos la información
relacionada con la vegetación minimizando la influencia de perturbaciones como las
debidas al suelo y a las condiciones atmosféricas”. Los índices de vegetación definidos
hasta el momento tienen en común el uso de los valores de reflectividad en la banda del
rojo y del infrarrojo cercano, debido al diferente comportamiento de la vegetación verde
y el suelo en estas bandas.
La vegetación verde apenas refleja radiación en el rango visible porque los
pigmentos de la hoja la absorben. Sin embargo estas sustancias no afectan al infrarrojo
16
cercano. Por eso se produce un notable contraste espectral entre la baja reflectividad de
la banda R (roja del espectro) y la banda del IR cercano, lo que permite separar, con
relativa claridad, la vegetación sana de otras cubiertas. Cuando la vegetación sufre algún
tipo de estrés (p ej por plagas o sequías) su reflectividad en el IR cercano es menor, y
paralelamente aumenta en el rojo, por lo que el contraste entre ambas bandas será
mucho menor. En definitiva, cuanto mayor sea la diferencia entre las reflectividades
de la banda del IRC y el rojo, mayor vigor vegetal presentará la cubierta. Bajos
contrastes indican una vegetación enferma o con poca densidad, hasta llegar a los suelos
descubiertos o al agua, que presentan muy poco contraste entre el IRC y el rojo. En este
principio se apoyan la mayor parte de los índices de vegetación (IV). Durante los
últimos 20 años se han publicado cerca de 40 IVs. Los más empleados son el cociente
simple entre esas bandas (C), el denominado índice normalizado de vegetación (NDVI,
Normalizad Difference Vegetation Index)
Ci
i ,IRC
i ,R
NDVI i
i ,IRC i ,R
i ,IRC i ,R
i,IRC y i,R son las reflectividades del píxel i en la banda del infrarrojo cercano y del
rojo respectivamente.
El NDVI varía entre unos márgenes conocidos, entre -1 y +1, lo que facilita su
interpretación. Pudiendo establecerse como límite para las cubiertas vegetales un valor
de 0,1 y para la vegetación densa entre 0,5 y 0,7. Cualquier valor negativo implica la
ausencia de vegetación.
Aunque estos índices se refieren a reflectividades muchos autores emplean
directamente los ND de la imagen, ya que se sigue manteniendo el hecho de que cuanto
mayor sea el resultado mayor vigor vegetal presenta la zona observada. Sin embargo,
según algunos estudios el cálculo de este índice a partir de ND subestima entre 0,05 y
0,2 el valor calculado con reflectividades. Por lo que parece necesario una formulación
alternativa para corregir este error sistemático:
NDVI
NDir 0,801NDr
NDir 0,801NDr
La ventaja y el inconveniente del índice de vegetación es que no responde a una
variable concreta sino a un conjunto de factores (cobertura, estado fenológico, estado
17
fitosanitario). Por tanto, no resulta sencillo utilizarla para estudiar aspectos específicos
de la vegetación pero aporta una idea de conjunto acerca de su estado. Entre las
variables que se han correlacionado con los índices de vegetación están; índice de área
foliar, contenido de agua de la hoja, flujo neto de CO2, radiación fotosintéticamente
activa absorbida por la planta, productividad neta de la vegetación, cantidad de lluvia
recibida por la vegetación, dinámica fenológica, evapotranspiración potencial.
Se han propuesto distintas variantes para mejorar este índice. Algunos autores
afirman que la influencia relativa de los efectos atmosféricos es minimizada más
efectivamente mediante combinaciones de bandas no lineales, por lo que proponen el
Global Environment Vegetation Index (GEMI), calculado como:
GEMI (1 0.25 )
R 0.125
1 R
2( IR 2 R 2 ) 1.5 IR 0.5 R
IR R 0.5
Además, un índice de vegetación ideal debe ser sensible a la parte verde de la
planta pero no al suelo. Por lo tanto, el objetivo fundamental es eliminar la influencia
que el suelo puede tener sobre las reflectividades en el rojo y el infrarrojo y que pueda
enmascarar las de la vegetación (lo que resulta espacialmente útil en medios
semiáridos). Para minimizar el efecto del suelo se utilizan los índices de vegetación
basados en el concepto de línea de suelos.
El principal factor que afecta a la reflexión del suelo es el contenido en
humedad. Sin embargo la influencia de la humedad es igual a lo largo del espectro, es
igual en todas las bandas. Por lo tanto, el ratio entre bandas espectrales, por ejemplo
entre las bandas Rojo e IR no depende de la humedad del suelo, por lo que es posible
definir el concepto ‘línea de suelo’, que es una línea que representa la relación entre las
reflexiones del suelo en el Rojo y el IR. La línea de suelos caracteriza el tipo de suelo y
es calculada por el método de regresión lineal y expresada así:
IR,suelo=a*R,suelo + b,
a y b – parámetros estimados mediante mínimos cuadrados, a es la pendiente y b el
origen de la recta.
18
Perpendicular Vegetation Index (PVI)
PVI ( R , suelo R ,veg ) 2 ( IR ,suelo IR ,veg ) 2
Sustituyendo aquí la ecuación de la línea de suelos:
PVI
IR ,veg a R ,veg b
1 a
2
a,b – parámetros de la línea de suelo
PVI=0 suelo desnudo
PVI <0 agua
PVI > 0 vegetación
Como PVI no depende de la humedad del suelo, es menos variable de un suelo a otro.
Soil-Adjusted Vegetation Index (SAVI)
SAVI
( IR R )
(1 l )
( IR R l )
Normaliza mejor la influencia del suelo que los índices anteriores. La principal
desventaja es la determinación del parámetro l. El autor recomienda tomar un valor l=1
para densidades de vegetación bajas, 0.5 para valores intermedios y 0.25 para alta
densidad, por lo que se requiere información a priori.
Este índice fue mejorado dando lugar al Transformed Soil Adjusted
Vegetation Index (TSAVI):
TSAVI
a ( IR ,veg a R ,veg b)
R ,veg a IR,veg abX (1 a 2 )
X=0.08
TSAVI=0 suelo desnudo
LAI (Leaf area index - índice de superficie de hoja: superficie de hoja por unidad de
superficie de suelo) alto TSAVI proximo a 0.7.
Otras mejoras del SAVI son:
19
Modified SAVI (MSAVI)
MSAVI
2 IR l (2 l ) 2 8( IR R )
2
Optimizad SAVI (OSAVI)
OSAVI
IR R
IR E Y
En diferentes estudios se ha demostrado que estos índices presentan resultados
diferentes dependiendo de las condiciones. Por lo tanto, el mejor índice de vegetación
dependerá del tipo de sensor y de las características de la zona.
Los índices se pueden utilizar en 3 tipos de operaciones:
-
Comparación temporal de diferentes fuentes (imágenes tomadas en diferentes
fechas o desde dos satélites diferentes)
-
Integración en un proceso de clasificación. Debido a su poder discriminatorio
los índices constituyen una fuente de información para delimitar con más
precisión los contenidos de la clasificación.
-
Integración en un proceso de visualización. La calidad visual que aporta el
nuevo canal generado por el cálculo del índice puede usarse también en una
síntesis de canales como es la composición coloreada.
20
TEMA7:TRATAMIENTOSDIGITALESAVANZADOS
1.ANÁLISISDECOMPONENTESPRINCIPALES
Consiste en la creación de unos canales artificiales a partir de los originales, que
contengan el máximo contenido en información, es decir, que tengan una correlación
mínima y una varianza máxima.
Su objetivo es resumir la información contenida en un grupo amplio de
variables en un nuevo conjunto, más pequeño, sin perder una parte significativa de esa
información. Por lo tanto, los factores o componentes principales vendrían a ser como
variables-resumen de las medidas iniciales, preservando lo más sustancioso de la
información original.
Esta capacidad de síntesis es interesante en teledetección porque la adquisición
de imágenes en bandas adyacentes del espectro, implica con frecuencia detectar
información redundante, puesto que las cubiertas suelen presentar un comportamiento
similar en longitudes de onda próximas. Por ello, las medidas realizadas en una banda
pueden presentar una importante correlación con las realizadas en otra banda. El ACP
permite sintetizar las bandas originales, creando unas nuevas bandas, los componentes
principales de la imagen, que recojan la parte más relevante de la información original.
Esta selección de bandas no correlacionadas resulta muy conveniente cuando se está
realizando un estudio multitemporal o cuando se intentan seleccionar las 3 bandas más
adecuadas para una composición de color.
El sentido y la fuerza de la correlación lineal entre dos variables puede
representarse mediante dos ejes, en cada uno de los cuales se representa una variable. Si
los datos de ambas bandas tienen una distribución normal el resultado es una elipse. La
elipse que limita la nube de puntos indica el grado de correlación, de modo que la
correlación será tanto mayor cuanto más se aproxime esta elipse a una recta. En el
contexto de la teledetección la nube de puntos indica la localización de los ND en las
dos bandas consideradas.
21
El eje mayor de la elipse es el primer componente principal de los datos. La
dirección del primer componente principal es el primer eigenvector y la longitud es el
primer eigenvalor. Como el primer componente principal muestra la dirección y
longitud del eje mayor de la elipse es el que mide la mayor variación dentro de los
datos.
El segundo componente principal es el ortogonal al primer componente
principal, en una análisis en 2D es el eje menor de la elipse. Describe la varianza de los
datos que no es descrita por el primer componente principal. Y así sucesivamente: cada
componente principal es el mayor eje de la elipse que es perpendicular al componente
principal anterior y representa la variación de los datos que no está incluida en los
componentes principales anteriores.
Gráficamente se ve que una rotación de los ejes X, Y hacia las direcciones de A
y B mejorará la disposición original de los datos y, probablemente también la
separación entre grupos de ND homogéneos. Esta rotación se obtiene aplicando una
función del tipo
CP1 = a11NDi + a12NDk
CP es el primer componente principal obtenido a partir de los ND de las bandas i y k
tras aplicar los coeficientes a11 y a12. Desde el punto de vista geométrico, como puede
verse en la figura, este nuevo eje sólo supone una rotación de los originales. En
ocasiones, puede ser de gran interés acompañar la rotación con una traslación de los
ejes, situando el origen de coordenadas de los ejes en los valores mínimos de las dos
22
bandas, es decir, una traslación, para ello se le suma a la ecuación anterior dos
constantes a01 y a02.
Para un número p de bandas la ecuación a aplicar será esta
CPj=i=1,paijNDi + Rj
CP es el componente principal j, aij es el coeficiente aplicado al ND de la banda i para
generar el componente j, Rj es una constante que suele introducirse para evitar valores
negativos.
La obtención de los CP implica una transformación matemática compleja.
Algebraicamente el ACP genera nuevos componentes mediante una combinación lineal
de las p variables o bandas originales.
En primer lugar, para realizar el ACP se utiliza una matriz bidimensional, donde
n son los píxeles de una imagen y p son las bandas de la imagen
La i-ésima fila de la matriz contiene los n niveles digitales de la i-ésima banda
1. Con la matriz de varianza-covarianza x
en la que los elementos de la diagonal son las varianzas de los N.D. en cada banda:
ii
n
n
k 1
k 1
n x ik2 ( x ik )2
n ( n 1)
y los elementos fuera de la diagonal son las covarianzas entre los N.D. de dos bandas:
Como la covarianza entre la banda i y la j es la misma que entre la banda j y la i
(sij = sji) la matriz Sx es simétrica. Cuando hay relación lineal entre los N.D. de dos
23
bandas las covarianzas son grandes en comparación con las varianzas, por eso es que
esta matriz sirve para estudiar la relación entre pares de bandas.
A partir de la matriz de varianza-covarianza de las bandas que componen la
imagen original, se extraen los autovalores (). Los autovalores están dados por la
solución de la ecuación
. Los autovalores expresan la longitud de cada uno
de los nuevos componentes, y, en última instancia, la proporción de información
original que retiene el componente principal asociado. Este dato resulta de gran interés
para decidir qué componentes principales son más interesantes; es decir, los que mayor
información original retengan.
Tal y como se obtienen los CP, el autovalor va disminuyendo progresivamente,
del primero a los últimos, pues se pretende maximizar sucesivamente la varianza
extraída en el análisis. La varianza original explicada por cada componente se calcula
como la proporción de su autovalor frente a la suma de todos los autovalores:
Vj
j
j
j 1, p
siendo p el número total de componentes.
A partir de los autovalores se pueden calcular los autovectores mediante la
siguiente expresión
x
a1 1a1
Además de la longitud de cada eje, que nos proporcionaban los autovalores,
resulta también de gran interés conocer su dirección. Además, para calcular las
ecuaciones anteriores se precisa contar con los coeficientes de la transformación.
Ambos aspectos se pueden conocer a partir de los autovectores. El autovector indica la
ponderación que debe aplicarse a cada una de las bandas originales para obtener el
nuevo CP. Es decir, equivale a los coeficientes de regresión de una transformación
lineal estándar, siendo las bandas de la imagen las variables independientes y los CP las
dependientes. Una vez que conocemos los autovectores, el último paso es obtener una
imagen de los componentes principales, a partir de una combinación lineal de las bandas
originales.
CPj=i=1,paijNDi + Rj
Un módulo de ACP de un programa deberá proporcionar:
-
Los mapas de valores de los componentes
24
-
Los auto-valores para determinar el porcentaje de varianza explicada por cada
componente
-
La matriz de auto-vectores que permitirá determinar cuál es el peso de cada
variable (banda) en cada componente.
Ejemplo 1
Suponga que los N.D. de 6 píxeles en 2 bandas son:
Banda 1
2
4
5
5
3
2
Banda 2
2
3
4
5
4
3
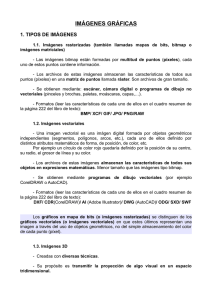
El sentido y la fuerza de la correlación lineal entre dos bandas puede representarse
gráficamente mediante un diagrama de dispersión. Cuanto más se aproximan los puntos
a una recta mayor será el grado de correlación entre bandas.
Para este ejemplo
La matriz de varianza-covarianza de los datos es
Para determinar los componentes principales es necesario encontrar los autovalores y
autovectores de SX. Los autovalores están dados por la solución de la
ecuación
,
es
decir
, es decir
ó
equivalentemente
, que da por resultados
1=2.67 y 2=0.33.
Los autovectores se calculan mediante la expresión
25
x
a1 1a1
1.9 1.1 a11
a11
2,67
1.1 1.1 a12
a12
0,77a11-1,1a12=0
1,57a12-1,1a11=0
Como, además, los autovectores deben estar normalizados a11 a12 1 . Esta
2
2
ecuación conjuntamente con el sistema anterior da por resultado
a11=0,82 a12=0,57
Repitiendo el mismo proceso para el autovalor 0,33 se obtienen los autovectores
a11=--0,57 a12=0,82
y los componentes principales son:
Para los datos del ejemplo resulta:
Como los valores del primer componente son grandes comparados con los del
segundo, la mayor variabilidad se da en la dirección del primer componente principal, lo
cual indica que contiene la mayor parte de la información. Más específicamente, el
primer componente contiene el
de la variación total. De esta
manera, el primer componente muestra un alto contraste visual. Por otra parte el
segundo componente es perpendicular al primero (porque no están correlacionados) lo
que indica que contiene información no incluida en el primer componente. Todo esto se
confirma en la Figura 3, donde se han graficado los datos en los dos sistemas (bandas y
componentes principales).
26
Ejemplo 2
A partir de una muestra sistemática de 1 de cada 8 píxeles se obtuvo la matriz de
varianza-covarianza para esas bandas:
B1
B2
B3
B4
B5
B1
102,83
B2
107,91
123,68
B3
156,30
176,07
271,58
B4
71,71
114,86
127,63
583,76
B5
148,94
183,70
275,91
340,63
516,96
B7
141,22
161,53
251,25
157,26
369,24
B7
314,29
27
Los autovalores extraídos fueron: 1365,72, 410,24, 115,60, 9,64, 9,05 y 2,83.
Según
Vj
j
j
j 1, p
la varianza original asociada con cada uno de estos componentes resultó ser 71,39%
para el primer componente, 21,44% para el segundo, 6,04% para el tercero, 0,5% para el
cuarto, 0,47% para el quinto, y 0.15% para el sexto. De acuerdo a estos porcentajes se
seleccionaron únicamente los 3 primeros componentes, que retenían un total del 98,87%
de la varianza original de la imagen.
La matriz de auto-vectores:
B1
B2
B3
B4
B5
B7
CP1
0,213
0,258
0,374
0,462
0,589
0,434
CP2
-0,213
0,171
-0,354
0,834
-0,041
-0,321
CP3
0,381
0,400
0,464
0,238
-0,585
-0,284
La matriz de autovectores muestra el sentido espectral de los componentes, es
decir, evidencia la asociación entre cada componente y las bandas originales. En esta
tabla puede verse que el primer componente recoge una valoración de las características
espectrales comunes a todas las bandas, lo cual puede asimilarse con el brillo de la
imagen, similar al aspecto que podría presentar una imagen pancromática.
El segundo componente muestra una importante asociación positiva con la
banda 4, apenas perceptible con la 5 y moderadamente negativa con el resto. En
definitiva, está evidenciando el contraste espectral entre el IRC y el resto de las bandas,
lo que muestra una valoración del vigor vegetal.
El tercer componente ofrece un claro contraste entre el visible-infrarrojo
próximo y el infrarrojo de onda corta, con correlaciones positivas para las primeras
bandas y negativas para las segundas. Esto parece indicar una valoración del contenido
de agua, por lo que se denomina componente humedad.
Las imágenes de los CP resultantes parecen demostrar esta interpretación. La
primera presenta una fisonomía similar a la de una imagen pancromática, con valores
promedio de las distintas cubiertas, bajos valores en el agua y la vegetación, medios en
los espacios edificados, y altos en los suelos descubiertos. El segundo componente
evidencia los sectores con una actividad clorofílica más intensa, como los pastizales y
cultivos, con tonos medios para los pinares y urbanizaciones, y tonos oscuros para los
28
suelos descubiertos, aguas y vías de comunicación. El tercer componente remarca con
claridad las láminas de agua, vías de comunicación y espacios edificados.
Para facilitar la interpretación de toda esta información se puede generar una
composición en color con los 3 primeros componentes principales. Esta imagen se ha
obtenido asignando el cañón de color rojo al primero componente, el verde al segundo y
el azul al tercero. Las áreas de mayor vigor vegetal aparecen en verde o cian, mientras
los suelos descubiertos o áreas urbanas aparecen en magenta, y las láminas de agua en
azul.
La capacidad de síntesis del ACP la hace muy apropiada como filtro previo para
el análisis multitemporal. En este caso, el ACP sirve para retener la información más
significativa en cada período. Posteriormente, los CP de cada fecha se combinan, con
objeto de facilitar una mejor discriminación de cubiertas con perfiles estacionales
marcados. En este caso los primeros componentes resultantes del análisis no son los
más interesantes ya que recogen información común a las distintas fechas, es decir, la
información estable. Los últimos componentes son los que ofrecen la información no
común, es decir, la que cambió, que es la que interesa en este contexto.
Un problema inherente al ACP es la dificultad de establecer una interpretación a
priori de los componentes, ya que la transformación es puramente estadística y, por
tanto, muy dependiente de las características numéricas de la imagen. Algunos autores
sugieren que el primer componente siempre indica el brillo general y el segundo el
verdor. No obstante, esta afirmación es cierta cuando la imagen contiene una cantidad
suficiente de cobertura vegetal. De otra forma, el componente de vegetación puede ser
el tercero o cuarto. En definitiva, no pueden aplicarse reglas generales para la
interpretación de los CP.
2.TRANSFORMACIÓNTASSELEDCAP(TTC)
Esta transformación se dirige a obtener nuevas bandas por combinación lineal de
las originales, con objeto de realzar algunos rasgos de interés en la escena. La diferencia
con el ACP es que la TTC ofrece unos componentes con significado físico,
independientes del tipo de imagen. Se basa en la evolución espectral de los cultivos a lo
largo de su período vegetativo.
La TTC fue ideada por la NASA y el USDA en los años 70 con objeto de
mejorar la predicción de cosechas. A partir de una serie de imágenes de zonas agrícolas
29
se trató de sintetizar los ejes de variación espectral de los cultivos en una figura tridimensional, de aspecto parecido a un gorro con borlas (tasseled cap). Considerando la
banda roja e infrarroja, la base de este gorro se define por la línea de suelos, donde se
sitúan los diferentes tipos de suelo.
A medida que crece la vegetación sobre un tipo de suelo, disminuye la
reflectividad en el rojo y aumenta en el infrarrojo cercano, por lo que el punto va
separándose de la línea del suelo en sentido ascendente y hacia la izquierda. Según el
cultivo va ganando en vigor, tiende a separarse de la línea del suelo, aproximándose al
eje de la banda infrarroja, y convergiendo en un punto cuando se produce la máxima
madurez. A partir de ahí el cultivo tiende a marchitarse, retornando hacia la línea de
suelos. La distancia de cada punto a la línea de suelo será, por tanto, proporcional a la
cantidad de vegetación.
La TTC tiende a poner más en evidencia el comportamiento espectral de la
vegetación y el suelo, a partir de crear nuevos ejes mejor ajustados a este espacio físico.
En este nuevo sistema de coordenadas se pretende que sea más nítida la separación entre
30
ambas cubiertas. Para el caso de las imágenes MSS sobre las que se desarrolló esta
transformación, los nuevos ejes se obtuvieron a partir de:
u j R i' x i c
donde u es el vector correspondiente a la imagen transformada, xi el vector de entrada,
Ri el vector de coeficientes de transformación y c una constante para evitar valores
negativos. Los autores sugieren un valor c=32 y estos coeficientes. Los coeficientes
propuestos pueden aplicarse a distintas imágenes del mismo sensor, con la particular de
que fueron obtenidos a partir de las características de la cubierta agrícola del mediooeste
americano.
Los autores de esta transformación sugieren 3 componentes: uno denominado
Brillo (brightness), suma ponderada de las cuatro bandas originales, otro denominado
Verdor (greenness), relacionado con la actividad vegetativa (es similar a un índice de
vegetación y permite llevar a cabo un análisis de la densidad y estado de salud de la
vegetación), un tercero conocido como Marchitez (yellowness) que pretendía
relacionarse con la reducción en el vigor vegetal, y un cuarto sin significado aparente
(Nonsuch).
En un primer momento, esta transformación no se utilizó mucho. En los años 80 se
empezó a utilizar más y se demostró su aplicabilidad a otros sensores, principalmente al
TM y al AVHRR. En el sensor TM se puso de manifiesto la presencia de un nuevo
componente denominado Humedad (Wetness). En consecuencia, una imagen TM
presenta 3 ejes principales de variación:
1. Brillo (Brightness): refleja la reflectividad total de la escena.
2. Verdor (Greenness): indica el contraste entre las bandas visibles y el IRC.
3. Humedad (Wetness): se relaciona con el contenido de agua en la vegetación y en
el suelo, y se marca por el contraste entre el SWIR (infrarrojo de onda corta), en
donde se manifiesta con mayor claridad la absorción de agua, y el visible. Otros
autores han propuesto denominar a este componente Maturity, puesto que se ha
encontrado una clara relación con la madurez de la cubierta vegetal. En algunos
estudios se ha mostrado como un buen indicador de la edad y densidad de la
cobertura forestal. Además se observó que era el componente menos afectado
por la topografía.
31
La combinación de estos ejes o componentes permite distinguir varios planos de
variación, de gran interés para el estudio de suelos y vegetación. Se suelen distinguir 3
planos:
-
Plano de vegetación, formado por el eje de brillo y de verdor
-
Plano de suelos, formado por el eje de brillo y la humedad
-
Plano de transición, formado por el eje de humedad y el de verdor
Una de las ventajas de esta transformación frente al ACP radica en su
interpretabilidad física. Los componentes deducidos mediante la TTC tienen un
significado preciso, independiente de las condiciones de la escena, puesto que se apoyan
sobre las características del sensor y no sobre la radiometría de la imagen. Por lo tanto,
los coeficientes propuestos pueden aplicarse a distintas imágenes del mismo sensor, con
la particular de que fueron obtenidos a partir de las características de la cubierta agrícola
del mediooeste americano.
32
TEMA8:EXTRACCIÓNDELAINFORMACIÓN
1.FUNDAMENTOS
La clasificación supone, en muchos casos, la fase culminante del análisis de
imágenes. Clasificar una imagen implica categorizar dicha imagen, de tal forma que el
ND de un píxel determina la clase donde ha de ser incluido. Si un píxel satisface unos
determinados criterios es asignado a una clase que se corresponde con esos criterios. Un
método de clasificación debería contar con las siguientes características:
1. Exacto
2. Reproducible, por otros para las mismas variables de entrada
3. Robusto, no sensible a pequeños cambios en las condiciones de entrada
4. Exhaustivo, que cubra todo el territorio de estudio
5. Objetivo, que no esté marcado por las decisiones del intérprete. Aunque este
punto es matizable, ya que el conocimiento del intérprete puede resolver algunos
problemas de discriminación de cubiertas.
La clasificación digital implica categorizar una imagen multibanda. En términos
estadísticos, esto supone reducir la escala de medida, de una variable continua (la de los
ND originales) a una escala categórica u ordinal.
Los ND que forman la imagen son una traducción digital de un flujo energético
recibido por el sensor para una determinada banda del espectro. En consecuencia, una
clasificación basada exclusivamente sobre ND puede denominarse propiamente
clasificación espectral. El problema es que puede haber distintas categorías temáticas
con un comportamiento espectral similar. En ese caso se recomienda acudir a las otras
dos dimensiones de información que contiene una imagen: la espacial y la temporal. En
el primer caso se trata de tener en cuenta en la clasificación el contexto espacial en el
que aparece el píxel. El segundo aportaría datos sobre su evolución estacional, lo cual
puede ser especialmente útil para discriminar cubiertas vegetales. Si ninguna de estas
tres dimensiones es suficiente para clasificar ciertas cubiertas, puede ser preciso acudir a
información auxiliar como topografía, suelos, etc.
La clasificación digital es similar a la foto-interpretación. En la foto-interpretación,
en primer lugar el intérprete identifica el patrón visual asociado a cada cubierta.
Posteriormente, delimita sobre el resto de fotografías las zonas que se corresponden con
33
el modelo previamente definido. Por último, verifica sobre el terreno la interpretación
realizada. Este es el mismo esquema de la clasificación digital, en la que se distinguen
las siguientes fases:
-
Definición digital de las categorías (fase de entrenamiento). Consiste en definir
el rango de ND que identifica a cada categoría.
-
Agrupación de los píxeles de la imagen en cada una de esas categorías (fase de
asignación).
-
Comprobación y verificación de resultados. Las técnicas de verificación son
aplicables tanto al tratamiento digital como al análisis visual.
2.FASEDEENTRENAMIENTO
Diversos factores introducen una cierta dispersión en torno al comportamiento
espectral medio de cada cubierta. Esto implica que las distintas categorías no se definen
por un solo ND, sino por un conjunto de ND, más o menos próximos entre sí. Por ello,
la fase de entrenamiento resulta compleja: se trata de definir con rigor cada una de las
categorías que pretenden discriminarse, teniendo en cuenta su propia variabilidad en la
zona de estudio.
La fase de entrenamiento consiste en seleccionar una muestra de píxeles de la
imagen, que representen, adecuadamente, las categorías de interés. A partir de esos
píxeles pueden calcularse los ND medios y la variabilidad numérica de cada categoría.
Hay dos métodos de clasificación: supervisado y no supervisado, de acuerdo a
las formas en que son obtenidas las estadísticas de entrenamiento. El método
supervisado parte de un conocimiento previo del terreno, a partir del cual se
seleccionan las muestras para cada una de las categorías. El método no supervisado
consiste en una búsqueda automática de grupos de valores homogéneos dentro de la
imagen. El usuario definirá posteriormente a qué categorías corresponden estos grupos.
En una clasificación temática hay 2 tipos de clases: informacionales y espectrales. Las
primeras son las que constituyen la leyenda a la que se pretende llegar. Las segundas,
corresponden a los grupos de valores espectrales homogéneos dentro de la imagen, con
una reflectividad similar. Las categorías informacionales se establecen por el usuario,
mientras que las espectrales se deducen de los ND presentes en la imagen. Al comparar
las clases informacionales con las clases espectrales se debe determinar cómo las clases
34
espectrales se transforman en clases informacionales. Lo ideal es que las categorías a las
que se pretende llegar se correspondan con otras tantas clases espectrales.
La diferencia entre el método supervisado y el no supervisado estriba en que el
supervisado pretende definir clases informacionales, mientras que el no supervisado
tiende a identificar las clases espectrales presentes en la imagen.
3.CLASIFICACIÓNNOSUPERVISADAYSUPERVISADA
El método no supervisado.
Se asume que los ND de la imagen forman una serie de agrupaciones de píxeles
con un comportamiento espectral homogéneo y, que por lo tanto, deberían definir clases
temáticas de interés. El método para definir los agrupamientos espectrales se basa en la
selección de 3 parámetros:
1. Variables que intervienen en el análisis
2. Criterio para medir la similitud o distancia entre casos
3. Criterio para agrupar los casos similares
En el contexto de teledetección las variables son las bandas seleccionadas para la
clasificación. Los casos son los píxeles, cada uno definido por tantos ND como bandas.
La delimitación de cada grupo espectral se realiza mediante dos criterios; la similitud
entre píxeles y el algoritmo de agrupamiento.
1) Para medir la similitud o la distancia entre píxeles se han propuesto varios criterios,
el más utilizado se basa en la distancia euclidiana
d a,b
(ND
I 1,m
a ,i
ND b ,i )2
donde dab es la distancia entre dos píxeles a y b, NDai y NDbi son los niveles digitales de
esos píxeles en la banda i, y m es el número de bandas. Aunque hay otras medidas de
distancias.
2) En cuento al algoritmo de agrupamiento, también hay varias opciones. Uno de los
más comunes es el denominado ISODATA que consiste en las siguientes fases:
1. Señalar una serie de centros de clase
2. Se asignan todos los píxeles al centro de clase más próximo utilizando la distancia
euclidiana
3. Se calculan de nuevo los centros de clase, teniendo en cuenta los valores de los
píxeles incorporados en la fase anterior.
35
4. Se reordenan los centros de clase en función de los parámetros de control indicados
por el usuario, como número de grupos, distancia mínima entre grupos, tamaño mínimo
de un grupo y varianza máxima de un grupo.
5. Se vuelven a asignar todos los píxeles al centro más cercano
6. Si el número de píxeles que ha cambiado de grupo es inferior al señalado por el
usuario se termina el proceso.
El problema es la elección de los parámetros de control, ya que no se conoce de
partida el número de grupos espectrales presentes en la imagen, o la distancia entre
grupos. Otro inconveniente es el notable volumen de cálculo que requiere, ya que
normalmente es necesario un elevado número de iteraciones.
El método supervisado.
Requiere un cierto conocimiento de la zona de estudio para delimitar sobre la
imagen unas áreas suficientemente representativas de cada una de las categorías. Estas
áreas se denominan áreas de entrenamiento, se trata de áreas de las que se conoce a
priori la clase a la que pertenecen y que sirven para entrenar al software en el
reconocimiento de las distintas categorías. A partir de ellas, el software establece los
ND que definen cada una de las clases, para luego asignar el resto de los píxeles de la
imagen a una de esas categorías en función de sus ND. Es decir, a partir de los
estadísticos de cada clase, cada píxel de la imagen es comparado con estos valores y
etiquetado con la clase a la que se parece digitalmente.
La mayor parte de los equipos de análisis de imágenes permiten localizar
interactivamente las áreas de entrenamiento. Con el ratón el usuario introduce los
36
vértices que definen estas áreas, asignándolas a una de las categorías definidas
previamente en la leyenda. También hay un método automático, llamado ‘semillado’,
en el que se localiza un píxel central a partir del cual se agregan los píxeles vecinos en
función de su proximidad espectral hasta formar un polígono. Para ello el usuario debe
introducir un valor límite de varianza espectral para el polígono. Conviene que exista un
control de campo suficiente para estas áreas de entrenamiento.
Los píxeles seleccionados deben ser lo suficientemente representativos de cada
clase y que reflejar adecuadamente su variabilidad espectral en la zona de estudio. En
cuanto al número de píxeles a seleccionar, se requiere un mínimo de m+ 1 píxeles por
categoría, siendo m el número de bandas. Conviene, no obstante, superar con creces este
límite mínimo. Diversos autores recomiendan seleccionar un número de píxeles
comprendido entre 10*m y 100*m por categoría. Además resulta más conveniente
elegir varias áreas de entrenamiento de pequeño tamaño que una sola de mayores
dimensiones, ya que sino tenderá a infravalorarse la variabilidad espacial de esa
categoría. Algunos autores sugieren que ningún área de entrenamiento debería ser
superior a 10 píxeles, debido al efecto de auto-correlación. Esto significa que los píxeles
adyacentes tienen una alta probabilidad de tener valores de brillo similares, por lo que
tienden a tener una varianza reducida que puede ser debida más al modo en que el
sensor toma los datos que a las propias condiciones de la cubierta. Esto se debe a que la
mayoría de los detectores se detienen sobre un píxel durante un breve período de tiempo
pudiendo arrastrar información espectral desde un píxel a otro adyacente. Algunos
autores recomiendan seleccionar píxeles aislados para cada categoría, o seleccionar
píxeles aleatoriamente dentro de campos de mayor tamaño. Finalizada la selección de
las áreas de entrenamiento, el software calcula las estadísticas de cada categoría; media,
rango, desviación típica, matriz de varianza-covarianza, etc. a partir de los ND de todos
los píxeles incluidos en las áreas de entrenamiento asignadas a esa clase.
4.MEDIDADELASEPARABILIDADENTRECLASES
Antes de empezar el proceso de clasificación se analiza la separabilidad real de
las categorías seleccionadas. Esto consiste en saber si estadísticamente existen
diferencias significativas entre las distintas categorías. Si se comprueba que dos o más
categorías son muy similares, sería probable que hubiera confusión entre ellas, por lo
que resultaría aconsejable:
37
1. Confirmar que las estadísticas de entrenamiento son correctas
2. Adoptar una leyenda más general
3. Recabar información auxiliar.
Existen varios métodos para evaluar las estadísticas de entrenamiento. Por ejemplo,
un gráfico en el que en abscisas figuran las bandas que intervienen en el análisis y en
ordenadas los ND medios de cada categoría. Las líneas paralelas y próximas indican un
probable solape entre categorías. Pero este gráfico sólo refleja la tendencia media, no
considera la variación propia de cada categoría.
Esto se puede representar a partir de un gráfico de solape espectral, que es un
diagrama de barras que recoge en cada banda y para cada categoría, el rango digital
cubierto por la media una o dos desviaciones típicas.
Otra forma de representar los solapes entre categorías es el histograma de
frecuencias de los ND que componen cada categoría. Se supone que los ND se
distribuyen normalmente, esto permite estimar su distribución a partir de su media y
desviación típica. De esta forma se construye una figura así, dibujando la elipse de la
distribución normal para todas las categorías, fijando la extensión de la elipse a 2
desviaciones típicas de la media. Este gráfico permite observar con mayor nitidez los
posibles solapes entre categorías.
Además de los procedimientos gráficos, existen algunos criterios cuantitativos,
el más sencillo es la distancia normalizada entre dos categorías:
dn
A ,B
ND A ND B
sA sB
ND es la media de las categorías A y B, y SA y SB sus desviaciones típicas. Este
cálculo se aplica a cada par de bandas.
Existen otras medidas estadísticas más complicadas basadas en las divergencias. Cuanto
mayor sea el valor de la divergencia mayor será la separabilidad entre clases.
5.FASEDEASIGNACIÓN
Se trata de adscribir cada uno de los píxeles de la imagen a cada una de las clases
previamente seleccionadas en función del ND de cada píxel. Los criterios más comunes
son:
-
Mínima distancia, por el cual el píxel se asigna a la clase más cercana.
38
-
Paralelepípedos, que permiten establecer umbrales de dispersión asociados a
cada clase
-
Máxima probabilidad, asigna el píxel a la clase a la que tiene mayor
probabilidad de pertenecer.
6.ALGORITMOSDECLASIFICACIÓN
Clasificador de mínima distancia
El criterio más sencillo para asignar un píxel a una de las categorías consiste en
incluirlo en la categoría más cercana, es decir, en aquella que minimice la distancia
entre ese píxel y el centroide de la clase. Se trata de la distancia espectral no geométrica,
es decir, la distancia entre el ND de cada píxel y el ND de los centros de las distintas
categorías. Esta distancia se puede medir de varias formas, la más empleada es la
distancia euclidiana
d x ,A
(ND
i 1,m
x ,i
ND A ,i )2
donde dx,A es la distancia entre el píxel x y la categoría A, NDx,i es el ND del píxel x
en la banda i y NDA,i es el valor medio de esa categoría en la banda i.
Tras calcular esta distancia para todas las categorías, se asigna el píxel a la
categoría para la cual esta distancia sea la más pequeña. Este algoritmo es sencillo,
rápido y ofrece buenos resultados cuando no hay un gran solape entre categorías. No
deja píxeles sin clasificar, esto puede provocar errores de comisión, sobre todo cuando
no se incluye en la leyenda alguna categoría presente en la imagen. La distancia que
utiliza este algoritmo es lineal, no considera la varianza, por lo que tiende a delimitar
grupos circulares de radio proporcional a la situación de cada categoría.
Clasificador de paralelepípedos
La clasificación de paralelepípedos o hipercubos es un método que consiste en
fijar áreas de dominio para cada categoría y posteriormente asignar a esta categoría el
píxel si su ND pertenece a su correspondiente área en todas las bandas de la imagen. En
consecuencia, un píxel que presenta un nivel digital NDx,i en la banda i será atribuido a
la clase A si se verifica
ND A ,i R A ,i ND x ,i ND A ,i R A ,i
39
para todas las bandas, siendo RA,i es el rango de dispersión de la categoría A en la
banda i. Es decir, un píxel es asignado a una categoría si sus ND se encuentran a menos
de una determinada distancia del centro de esa clase. Esta distancia es fijada con el
usuario, aunque suele fijarse en la desviación típica, o en un múltiplo suyo. Cuanto
mayor sea esta distancia mayor será el número de píxeles incluidos en cada clase pero
también será mayor el riesgo de confusiones con categorías vecinas. Del mismo modo,
un valor pequeño garantiza mayor fiabilidad en las asignaciones, pero supone un mayor
número de píxeles sin clasificar.
Es un algoritmo bastante rápido, puesto que sólo requiere operaciones lógicas sencillas,
del tipo IF…THEN. Entre los principales problemas de este método se encuentra el que
haya píxeles en zonas comunes a dos o más categorías o que algunos píxeles queden sin
clasificar. Algunos autores han propuesto introducir el criterio de mínima distancia en
estas áreas en conflicto. Respecto a los píxeles sin clasificar, la solución pasa por
ampliar paulatinamente el rango de dispersión, estableciendo un equilibrio entre los
píxeles no clasificados y los solapes entre categorías.
Clasificador de máxima probabilidad
Este método considera que los ND de cada clase se ajustan a una distribución
normal. Eso permite describir cada categoría mediante una función de probabilidad, que
sirve para calcular la probabilidad de que un píxel pertenezca a dicha categoría. Se
asigna el píxel a la categoría para la cual la función de probabilidad es mayor. La
función de probabilidad se estima a partir de las medidas realizadas sobre las áreas de
entrenamiento, basta con conocer la media y la desviación típica de cada categoría:
p (x / A )
1
2
2
A
exp (ND X ND A )2 /2 A2
la probabilidad de que un píxel x definido por un NDx pertenezca a la clase A, se puede
calcular a partir de la media de la categoría, NDA y la varianza de esa clase.
El clasificador de máxima probabilidad demanda un mayor volumen de cálculo.
Sin embargo, es el más empleado en teledetección, porque se ajusta con más rigor a la
disposición original de los datos. Es posible reducir los errores de comisión
estableciendo unos umbrales de probabilidad para cada categoría. Esto, a su vez,
conllevará la aparición de píxeles no clasificados.
40
Clasificadores en árbol
Uno de los métodos más sencillos pero también más eficientes es el clasificador
en árbol, que consiste en discriminar secuencialmente cada una de las categorías,
basándose en los valores espectrales, o en la textura o en información auxiliar. Para cada
clase se establecen unas reglas que permiten discriminarla a partir de las variables en
que mejor se discrimina.
Estas reglas se introducen en el algoritmo en forma de operadores lógicos
condicionales, del tipo IF…THEN… (si ‘se cumplen determinadas condiciones’
entonces…), que intentan simular la toma de decisiones que realiza una persona. Por
ejemplo
IF NDIRC/NDR>2 AND Textura=Rugosa THEN Bosque
IF NDIRC/NDR>2 AND Textura=Lisa THEN Prados
De modo que se pueden introducir variables no obtenidas por teledetección. Es
decir, este método tiene una gran facilidad para integrar datos provenientes de fuentes
distintas de los satélites de teledetección. El establecimiento de estos criterios de
decisión se realiza por un experto en el reconocimiento de cada categoría. Una vez
ajustadas adecuadamente las reglas el clasificador en árbol resulta un criterio muy
rápido y que permite introducir información auxiliar.
Clasificadores basados en el contexto espacial
Para discriminar dos cubiertas puede ser necesario acudir a criterios no
estrictamente espectrales como los criterios espaciales, derivados de la situación de un
píxel respecto al resto de píxeles que forman la imagen. Es decir, habrá que tener en
cuenta criterios de textura y contexto.
La distinción entre textura y contexto se basa en el área que se considera en la
medición de las relaciones espaciales. La textura se relaciona con la variación espacial
dentro de grupos contiguos de píxeles. El contexto mide las relaciones espaciales de
cada píxel con el resto de la escena.
Los métodos para incluir el contexto espacial en la interpretación digital se
pueden agrupar en función de la fase de la clasificación en la que intervienen:
1 métodos que generan bandas texturales previas a la clasificación
2 métodos que emplean el contexto durante la clasificación
3 métodos que consideran el contexto después de la asignación con el fin de
refinar los resultados.
41
1. Los primeros métodos consisten en realizar una serie de medidas de textura
previas a la clasificación. Aunque también se puede realizar en la fase de
entrenamiento, por ejemplo el clasificador ECHO (Extraction and Classification
of Homogeneous Objects), que propone clasificar una imagen, no a partir de
píxeles, sino de áreas compuestas por píxeles de similares características. Es
decir, se trata de extraer previamente objetos homogéneos, que luego son
asignados a categorías. La delimitación de estas áreas homogéneas se basa en
criterios de similitud espectral y contigüidad.
2. Los clasificadores de contexto que incorporan el criterio del contexto en el
propio algoritmo de asignación, consisten en asignar un determinado píxel a una
categoría no sólo a partir de sus ND, sino también de los ND de los píxeles
vecinos. Una manera de aplicar este criterio es incorporar alguna variante de la
vecindad espacial a los clasificadores que ya vimos. P. ej. el en clasificador de
máxima probabilidad puede considerarse la probabilidad de asignación de los
píxeles vecinos. Esto permite incluir la información de los píxeles vecinos para
tomar una decisión en caso de que las probabilidades para dos clases sean
similares o no exista una clase con probabilidades de pertenencia
suficientemente altas.
3. Los métodos que introducen el contexto para refinar los resultados de la
clasificación.
Es frecuente que los resultados de una clasificación digital estén excesivamente
fragmentados, es decir, que manchas de una categoría se encuentran salpicadas
por píxeles asignados a otras categorías, dificultando su interpretación y la
representación cartográfica de los resultados. Este fenómeno se denomina efecto
de ‘sal y pimienta’, en inglés ‘salt and pepper’. Para solucionar este problema
suele aplicarse una técnica de suavización de resultados, similar a los filtros de
paso bajo. P. ej., se compara la clase de un píxel con la de sus vecinos, si esta
clase es la misma en la mayor parte de los píxeles se mantiene la asignación
original, en caso contrario, se modifica. Normalmente esta comparación se
realiza a partir de una ventana móvil de 3*3 píxeles. Se distinguen dos tipos de
filtros de este tipo:
-
Filtro modal. El píxel situado en el centro de la matriz se asigna a la categoría
más frecuente entre los píxeles vecinos.
42
-
Filtro de mayoría. El píxel central se asigna a la categoría que cuente con la
mitad más uno de los píxeles vecinos. En caso de que ninguna categoría rebase
ese valor, el píxel central mantiene su asignación primitiva.
El primero ofrece una mayor generalización que el segundo, por lo que puede
ser más conveniente en el caso de paisajes muy complejos. Se ha demostrado
que estos filtros aumentan la exactitud conseguida en la clasificación, pero su
principal problema es la difícil decisión sobre el tamaño de la ventana.
Redes neuronales artificiales (RNA)
Es una de las nuevas técnicas de clasificación de imágenes con mayor
potencialidad y que más se está utilizando actualmente. Las RNA predicen un
comportamiento complejo, a partir de una muestra de entradas y salidas observadas.
Con los datos de esta muestra la red ‘aprende’ a reconocer el resultado a partir de los
valores de entrada. Una RNA está formada por un conjunto de elementos simples
(neuronas) distribuidos en capas. Las unidades que forman una capa están
conectadas con la capa o capas inmediatas a través de unas funciones de activación.
Estas funciones se definen a partir de una serie de pesos (wij), que se calculan de
modo iterativo en el proceso de aprendizaje de la red. El objetivo de este aprendizaje
es estimar unos resultados conocidos a partir de unos datos de entrada (muestra de
control), para posteriormente calcular resultados desconocidos a partir del resto de
datos de entrada.
El número de unidades y de capas depende de las condiciones del problema,
siendo más complicado el proceso de aprendizaje cuanto mayor es la dimensión de
la red. En clasificación de imágenes es frecuente que las RNA estén formadas por 3
capas, denominadas capa de entrada, oculta y de salida. El número de las unidades
de entrada está relacionado con los valores que sirven para entrenar la red,
habitualmente una por cada banda empleada en la clasificación. El número de
unidades de salida coincide con el número de clases en que se pretende clasificar la
imagen. El número de unidades en la capa oculta puede variar, aunque se
recomienda que sea al menos igual al de la capa de entrada.
La parte esencial de esta técnica es el denominado aprendizaje de la red, en el
que se configuran las conexiones y pesos entre las unidades de la red. El criterio de
aprendizaje más conocido es el de retro-propagación:
43
1. Se asignan unos pesos arbitrarios a la red. Los resultados con estos pesos para la
muestra de control se comparan con los resultados conocidos. Esto permite obtener
una tasa de error inicial. La medida habitual del error es la desviación cuadrática
entre el resultado esperado (tk) y el producido por la red (ok)
E
(t
k 1,n m 1,c
k ,m
o k ,m ) 2
donde m son los resultados esperados (en este caso las c categorías) y k son las
unidades de entrada (en este caso las n bandas).
2. Se van modificando iterativamente los pesos de las distintas capas con el objetivo
de reducir este error, hasta que el error sea muy pequeño o nulo, o bien hasta que se
haya cumplido el número de iteraciones indicadas por el intérprete. Al principio del
entrenamiento los factores de ponderación cambian muy deprisa. Pero si las áreas de
entrenamiento se han seleccionado correctamente, llega un momento en el que los
factores de ponderación se estabilizan, es decir, no se modifican aunque se vuelvan
a introducir los píxeles de entrenamiento. En este momento finaliza la fase de
entrenamiento. En ese momento ya se pueden introducir los ND de los píxeles cuya
clase no se conoce y se adjudican a la clase que de la respuesta más alta.
En el contexto de la clasificación de imágenes se ha comprobado la potencialidad de
las RNA como alternativa a los clasificadores estadísticos tradicionales, sobre todo
cuando no se pueden asumir distribuciones normales. Aunque se han obtenido
resultados mejores que con los clasificadores tradicionales, la calidad de la
discriminación depende en gran medida de la calidad del entrenamiento. Las RNA
pueden incluir bandas auxiliares no espectrales, correspondientes, p ej, a un mapa de
suelos. Además, se ha comprobado la robustez de esta técnica para incluir elementos
texturales, ofreciendo así una clasificación con menos ruido. Entre los problemas de las
RNA se puede citar la falta de criterios generales para diseñar la estructura de la red, su
lento y tedioso entrenamiento (que desaconseja su empleo cuando el número de clases
o de bandas es muy grande).
Clasificación borrosa (fuzzy)
Los clasificadores que hemos visto hasta ahora son clasificadores ‘rígidos’ (hard
classifiers), en donde cada píxel se asigna a una única categoría. Esto puede conducir a
errores, p ej, en el criterio de máxima probabilidad, un píxel se asigna a la clase a la que
44
es más probable que pertenezca, independiente de que la probabilidad de pertenecer a
esa categoría sea 0,9 o escasamente 0,55. En el primer caso la probabilidad de error es
bastante baja, mientras que en el segundo caso la asignación es muy arriesgada. Las
nuevas técnicas de clasificación borrosa o fuzzy permiten aliviar este problema. En este
enfoque cada píxel tendrá un grado de pertenencia a cada categoría. Este valor de
pertenencia se obtiene mediante una función de pertenencia que proporciona valores
comprendidos entre 0 y 1.
Uno de los métodos más habituales para obtener estos valores de pertenencia es la
variante borrosa de máxima probabilidad.
U*A =
i= 1,n U A ( Mi ) Mi * i= 1,n U A ( Mi )( Mi - U*A )( Mi - U*A ) T
VA =
i= 1,n U A ( Mi )
i= 1,n U A ( Mi )
donde UA es el grado de pertenencia a la clase A, M es el vector de ND formado por los
n píxeles utilizados en la muestra, y VA la matriz de varianza-covarianza para esa clase.
A partir de estos dos valores se puede calcular la probabilidad de pertenencia, variando
ligeramente la fórmula de probabilidad
P* (x/a) = (2)-m/2 |V*a|-0,5 exp {-0,5 (Mx- M*A)T V*A-1 (Mx - M*A )}
Esta probabilidad se considera el grado de pertenencia de ese píxel a dicha categoría.
Por tanto, se obtienen tantas imágenes como categorías.
Las aplicaciones de esta lógica borrosa son de especial interés cuando se
pretende analizar coberturas con alto grado de mezcla, como en el caso de categorías
urbanas. Es muy útil por ejemplo para el inventario forestal, para la estimación de
densidades y superficies.
45
TEMA9:VERIFICACIÓNDERESULTADOS
La verificación de resultados permite al usuario valorar el riesgo que asume al
tomar decisiones sobre la información que ha generado. Este proceso de verificación
requiere siempre comparar los resultados obtenidos con una fuente externa que
represente la realidad presente en el terreno cuando se adquirió la imagen. Como
lógicamente no se dispone de esa información de referencia para toda el área de estudio,
ya que si fuera así no tendría sentido generarla de nuevo mediante teledetección, el
proceso de verificación requiere aplicar técnicas de muestreo.
La verificación de resultados incluye las siguientes fases:
1. Diseño del muestreo, señalando cuántas parcelas deben muestrearse y cómo se
seleccionan.
2. Recolectar datos de referencia y resultados sobre esas parcelas seleccionadas.
3. Comparar los datos de referencia y nuestros resultados, mediante distintos tests
estadísticos y la generación de una matriz de confusión.
4. Análisis de los errores encontrados y validación de la calidad del proceso.
1.FUENTESDEERRORENLACLASIFICACIÓNTEMÁTICA
La fiabilidad de los resultados depende de distintas variables, como; las
características del sensor, que puede no tener la resolución necesaria para nuestra
aplicación, el método de trabajo, que puede no ser capaz de extraer toda la información
de la imagen, y la propia complejidad del área de estudio. Además también hay que
considerar los propios errores del proceso de verificación.
Limitaciones del sensor
Además de los posibles errores debidos a fallos del sensor, de la plataforma o de
los sistemas de recepción y grabación de la señal, las limitaciones intrínsecas del sensor
pueden ser una fuente importante de problemas, especialmente cuando se hayan
señalado unos objetivos poco realistas para los datos disponibles. La elección del sensor
más conveniente será un compromiso entre la inversión que supone y el nivel de error
que se puede tolerar.
Métodos de análisis
46
Los errores también se pueden deber a no aplicar el método más apropiado a ese
problema. También se puede incluir entre los errores derivados del método de análisis la
incorrecta selección de la fecha de adquisición de la imagen.
Estructura del territorio
En regiones con una morfología parcelaria con solares de muy pequeña
extensión, inferior incluso al tamaño del píxel, el sensor detecta una señal radiométrica
promedio entre dos o más cubiertas, haciendo prácticamente imposible su
discriminación. Este efecto es habitual en aplicaciones agrícolas con paisajes con
parcelamiento muy minucioso.
Además está el efecto de la disposición espacial de los tipos de cubierta. Es
decir, si las cubiertas vecinas tienen comportamientos espectrales muy distintos son más
fácilmente discriminables que si sus comportamientos espectrales son similares.
Además, la orientación, la pendiente y la densidad con que aparece una cubierta
implica una variabilidad espectral que dificulta la clasificación, provocando solapes y
confusiones con categorías vecinas.
El proceso de verificación
Una última fuente de error es el proceso de verificación. Por ejemplo, una mala
georreferenciación de la imagen que estamos utilizando para verificar implica
considerar valores de referencia incorrectos. También se pueden producir problemas
cuando la verificación se realiza por varias personas simultáneamente, debido a una
definición poco precisa de las categorías temáticas que lleva a una interpretación
diferente. Por último, el documento de referencia también puede incluir errores. P. ej. si
se utiliza una foto aérea la fotointerpretación puede no ser correcta. También puede
haber un desfase entre el momento de adquisición de la foto aérea y el momento de
adquisición de la imagen satélite.
2.MEDIDASDEFIABILIDAD
La medida de la exactitud alcanzada por los resultados de una clasificación se
realiza por varios procedimientos. El más sencillo es una valoración cualitativa, es
decir, el intérprete da por buenos los resultados si ofrecen una visión acorde con su
conocimiento de la realidad. Aunque esto parezca inaceptable todavía sigue siendo el
procedimiento más utilizado para valorar los resultados, ya que es el menos costoso y
mucho más rápido que una verificación rigurosa.
47
El siguiente método, en orden de dificultad, implica comparar los resultados con
una fuente estadística convencional, como pueden ser los inventarios agrícolas o
forestales que se hacen mediante encuestas. Esta opción se denomina ‘verificación no
espacial’ y, en el mejor de los casos, proporciona el grado de ajuste entre dos fuentes,
pero no informa sobre dónde se presentan los errores. Además no siempre resulta
sencillo ajustar la leyenda de la fuente estadística a la extraída de la imagen.
El tercer método de verificación implica utilizar como datos de comprobación
los mismos que se hayan empleado para ajustar el modelo. Esto reduce el trabajo de
campo pero implica un importante sesgo positivo en la valoración de los resultados. Es
decir, al utilizar las mismas áreas para entrenar y verificar es lógico que los píxeles
incluidos en ellas tengan una mayor probabilidad de clasificación certera que el resto de
los píxeles de la imagen.
Finalmente, el método más adecuado para verificar es seleccionar una serie de
muestras independientes que permitan generar una medida estadística más sólida. Esta
selección y recolección de muestras supone un coste adicional que no repercute
directamente en una mejora de su fiabilidad, lo cual explica las reticencias que puede
implicar esta fase.
A partir de estas muestras independientes puede estimarse el error de los
resultados, mediante algún estadístico, como el error medio cuadrático, o mediante una
matriz de confusión. Al tratarse de un muestreo espacial, el resultado permite conocer
no sólo el grado global de acierto, sino también en qué categorías se producen las
confusiones. Estas verificaciones se denominan espaciales, porque ofrecen una imagen
del patrón espacial del error.
Los valores de error obtenidos pueden utilizarse para corregir las estimaciones
de superficie para cada cobertura. P ej si obtenemos una superficie de trigo de 680 ha y
un error de omisión del 0,15, podría estimarse la superficie real cultivada en 782 ha
(680+0,15*680).
3.DISEÑODELMUESTREOPARALAVERIFICACIÓN
La muestra debe ser suficientemente representativa del área de estudio, y además
debe minimizarse el tamaño de la muestra para reducir los costes del proceso de
verificación. La unidad de muestreo es el elemento sobre el que se extraerá la
información de referencia para comparar con nuestros resultados. Con frecuencia se
48
identifica con el píxel, pero no tiene por qué. De hecho, en muchas ocasiones será más
conveniente utilizar como unidad de muestreo un grupo de píxeles, lo que permitirá
reducir posibles errores de georreferenciación. También se puede utilizar como unidad
de muestreo los polígonos temáticos resultantes de la clasificación.
Los tipos de muestreo más empleados son:
1. Aleatorio simple. Los elementos a verificar se eligen de tal forma que todos
cuenten con la misma probabilidad de ser seleccionados, y que la elección de
uno no influya en la del siguiente. Este muestreo es bastante sólido
estadísticamente, pero presenta problemas en su aplicación porque puede
suponer elevados costes de desplazamiento. Por otra parte, existe cierta
probabilidad de no recoger adecuadamente la variación espacial del error
presente en la imagen, y que algunas categorías poco frecuentes no estén
representadas en la muestra.
2. Aleatorio estratificado. La muestra se selecciona dividiendo la población en
regiones o estratos, de acuerdo a una variable auxiliar, p ej las categorías
temáticas. Es más complejo de diseñar que el anterior pero reduce el error de
muestreo siempre que la variable auxiliar esté claramente relacionada con la
distribución del error.
3. Sistemático. La muestra se distribuye a intervalos regulares, a partir de un punto
de origen señalado aleatoriamente. Garantiza un muestreo completo de la
superficie, pero puede facilitar estimaciones erróneas si existe algún tipo de
patrón periódico en el área observada.
4. Sistemático no alineado. Modifica el anterior al variar aleatoriamente, en cada
línea y columna del muestreo, una coordenada, manteniendo fija la otra. Esto
permite introducir una cierta aleatoriedad en la elección de la muestra, y reduce
el riesgo derivado de la periodicidad. Al mismo tiempo sigue garantizando una
revisión completa del territorio
5. Por conglomerados. La unidad de muestreo es un grupo de observaciones,
denominado conglomerado (cluster), en lugar de individuos aislados. Es decir,
en cada punto a verificar ser toman varias muestras, en punto vecinos al elegido
aleatoriamente, y de acuerdo a un esquema prefijado. Por ej. un conglomerado
podría estar constituido por 5 puntos, a cierta distancia del punto central y en
forma de L. Este método reduce los costes de transporte pero es menos preciso
que los anteriores.
49
El tamaño de la muestra depende, como en cualquier otro muestreo, del nivel
de confianza que se quiere, del error tolerable y de la heterogeneidad de la variable. La
muestra será tanto más grande cuanto mayor sea el nivel de confianza, menor el margen
de error y mayor la heterogeneidad.
Para calcular el tamaño de la muestra hay que fijar ese nivel de confianza, en
función de la precisión que queremos darle a los resultados. Para un nivel de confianza
o valor de probabilidad z se puede estimar el tamaño de la muestra, dependiendo del
tipo de muestreo seleccionado. P ej para el aleatorio simple:
s 2 (N n )
L z
n N
2
2
donde L es e intervalo de error tolerable, z la abscisa de la curva normal para un valor
determinado de probabilidad, s2 la varianza muestral, N el tamaño de la población, y n
el tamaño de la muestra. Para calcular el tamaño de la muestra es necesario fijar un
intervalo de error tolerable L, un rango de probabilidad z y estimar la varianza muestral
s2. Despejando en la fórmula anterior el tamaño de la muestra se calcula como
n
z 2s 2
s 2z 2
2
L
N
De estos parámetros el más complicado de cuantificar es la varianza muestral ya
que sólo se conoce al terminar el muestreo. Se puede estimar a priori a partir de
muestreos previos o se ha sugerido que la varianza es 0,29/0,21*rango de la variable, en
el caso de variables continuas. En el caso de variables categóricas se recomienda
emplear la expresión
z 2 pq
n 2
L
donde z es la abscisa de la curva normal (buscar tabla dist normal), p es el porcentaje
estimado de aciertos y q el porcentaje estimado de errores (p=1-q) y L el nivel permitido
de error. Los valores de p y q pueden estimarse a partir de datos auxiliares o
simplemente igualarse a 50.
Si quiere conocerse el número de puntos de muestreo para estimar, con el 95%
de probabilidad, el error de un mapa, suponiendo que los aciertos son del 85% y el error
máximo permitido es de 5%, tendríamos
1,96 2 85 15
n
195,92
52
50
es decir, se han de tomar 196 muestras para obtener los niveles de exactitud marcados
en el muestreo. Algunos autores proponen un valor mínimo de 50 píxeles por cada clase
temática.
4.RECOGIDADEINFORMACIÓN
Una vez diseñado el método y tamaño de la muestra, el paso siguiente consiste
en obtener para cada uno de los puntos el valor de la variable a verificar o la clase
temática de referencia. Este valor de referencia puede obtenerse por medición directa o
a partir de fuentes de información auxiliares. La medición directa requiere realizar un
trabajo de campo simultáneo a la adquisición de la imagen. Si la variable es muy
dinámica, p. ej. la temperatura, es especialmente crítica la sincronía con la imagen,
mientras que en otro caso puede aceptarse un cierto desfase.
Algunas de las variables estimables con teledetección pueden obtenerse en
terreno a partir de varios procedimientos (p. ej., métodos gravimétricos para estimar el
contenido en agua, estaciones meteorológicas). Es muy frecuente el empleo de
radiómetros de campo, que también se emplean en la fase de entrenamiento. Estos
equipos permiten medir la misma zona observada por el satélite en condiciones muy
controladas y sin influencia de la atmósfera, también facilitan el análisis de la
variabilidad espacial de las firmas espectrales.
En el caso de verificar mapas de clasificación, el intérprete en terreno tiene que
aplicar la misma definición de categorías temáticas que se hizo para clasificar la
imagen. Otro aspecto a considerar en el trabajo de campo es la correcta localización de
las parcelas de control, con objeto de controlar los errores debidos más a errores de
posición que de asignación, ya que en muchos casos la identificación de ciertos rasgos
sobre el terreno no es sencilla en la imagen. El empleo de cartografía a gran escala y de
GPS permiten una georreferenciación precisa y facilitan esta localización.
La alternativa a los trabajos de campo, que siempre son costosos y lentos, es el
empleo de documentos auxiliares de mayor detalle (como fotografías aéreas, mapas de
cultivos, …) El empleo de fotos aéreas es muy frecuente y adecuado si la foto y la
imagen son de la misma fecha. Por otra parte, el proceso de foto-interpretación
necesario puede conllevar errores de verificación.
51
5.MEDIDASDELERRORPARAVARIABLESCONTINUAS
Una vez obtenidos los datos de referencia puede calcularse el error de
estimación utilizando medidas estadísticas. La más habitual es el error medio cuadrático
(RMSE):
RMSE
( xˆ
i 1,n
i
x i )2
n
donde x^ es el valor estimado a partir de la imagen, xi el valor medido en el terreno.
El valor de RMSE es sólo una estimación del error real, puesto que se ha obtenido por
un muestreo.
6.MEDIDASDELERRORPARAIMÁGENESCLASIFICADAS:
MATRIZDECONFUSIÓN
En el caso de una imagen clasificada, tendremos un listado de puntos de
verificación, para los que poseemos tanto su cobertura real como la deducida por la
clasificación. Con esta lista puede generarse una tabla, denominada “matriz de
confusión”, ya que recoge los conflictos presentes entre categorías.
En esta matriz las columnas suelen indicar las clases de referencia y las filas las
categorías deducidas de la clasificación.
Ambas tendrán el mismo número y
significado, por lo tanto, se trata de una matriz cuadrada nn, donde n es el número de
categorías. Cada elemento de la matriz está ocupado por un número que representa la
cantidad de unidades de la muestra que, asignadas a la categoría que marca su fila,
realmente la verificación ha demostrado pertenencia a la clase que indica su columna.
La diagonal de la matriz expresa el número de puntos de verificación donde se
produce un acuerdo entre las
dos fuentes (imagen y realidad), mientras que los
elementos fuera de la diagonal suponen errores de clasificación. La relación entre el
número de puntos correctamente asignados y el total expresa la fiabilidad global del
mapa. Los residuales en columnas indican tipos de cubierta real que no se incluyeron
en el mapa, mientras los residuales en filas implican cubiertas del mapa que no se
ajustan a la realidad. En definitiva, representan los errores de omisión y de comisión
respectivamente.
El interés de esta matriz de confusión es su capacidad para plasmar los conflictos
entre categorías. De esta forma, no sólo se conoce la fiabilidad global de la
52
clasificación, sin también la fiabilidad para cada una de las clases, así como los
principales conflictos entre ellas.
7.ANÁLISISESTADÍSTICODELAMATRIZDECONFUSIÓN
A partir de la matriz de confusión pueden generarse una serie de medidas
estadísticas que permite validar numéricamente los resultados.
Fiabilidad global
La medida más simple es la fiabilidad global del mapa, relacionando el número
de celdas correctamente clasificadas con el total de celdillas muestreadas.
Fˆ
x
i 1,n
ii
x
i 1,n j 1,n
ij
A partir de este valor puede calcularse el intervalo de confianza donde se situará
la fiabilidad real alcanzada por la clasificación:
F Fˆ z .EM
El error del muestreo puede generarse a partir de la fórmula del muestreo
aleatorio simple:
EM
pq
n
Fiabilidad del usuario y del productor
En el caso de las columnas, los marginales indican el número de píxeles que,
perteneciendo a una determinada categoría, no fueron incluidos en ella. Son los que se
denominan errores por omisión, Eo:
E o ,i
x i x ii
x i
donde x+i es el marginal de la columna i, y xii la diagonal de dicha columna.
De un modo similar, las celdas no diagonales de las filas expresan los errores
por comisión, es decir, los píxeles que se incluyeron en una determinada categoría
perteneciendo realmente a otra:
E c ,i
x i x ii
x i
donde xi+ indica el marginal de la fila i, y xii la diagonal de dicha fila.
53
Además, algunos autores hablan de exactitud del usuario y del productor. La
exactitud del usuario está en relación inversa con los errores de comisión, y la exactitud
del productor con los errores de omisión:
F p ,i
x ii
x i
F u ,i
x ii
x i
para cada una de las n categorías.
Clase 1
Clase 2
Referencia
Clase 3
Clase n
Total
Exactitud
Error
Comisión
P. ej., si en una especie forestal el error de omisión es bajo, existe unaUsuario
alta probabilidad
X11
Clase 1
X1+
X11/X1+
1-X11/X1+
Clasificación
de que
ocupada por esa cubierta estéX incluidaXen/Xel mapa,
que
Clasela
2 superficie realmente
X
1-Xlo /X
22
2+
22
2+
22
2+
Clase 3 un logro para el productor del
significa
haber
un
alto
X33 mapa. Sin embargo,Xpuede
X33/Xa3+la vez
1-X
3+
33/X
3+
Clase n
Xnn forestal
Xn+ haya Xsido
1-Xnn/Xen
nn/Xn+ asignada
n+
error
de comisión, es decir, que la superficie
Total
X+1
X+2
X+3
X+n
Exactitud
X11/X+1
X22/X+2
X33/X+3
Xnn/X+n
1-X11/X+1
1-X22/X+2
1-X33/X+3
1-Xnn/X+n
ΣXij
localizaciones correspondientes a otras cubiertas, lo cual supone un grave riesgo para el
Productor
usuario
de esa información.
Error
Omisión
El estadístico Kappa
Resulta de gran interés para analizar las relaciones múltiples entre las distintas
categorías. El estadístico kappa (k) mide la diferencia entre el acuerdo mapa-realidad
observado y el que cabría esperar simplemente por azar. La estimación de k se obtiene
a partir de la siguiente fórmula
̂
n x ii x i x i
i 1,n
i i ,n
n x i x i
2
i i ,n
donde n es el tamaño de la muestra, xii el acuerdo observado y el producto de los
marginales (xi+ x+i) el acuerdo esperado en cada categoría. El acuerdo esperado indica el
ajuste que puede deberse al azar.
De modo que, el estadístico k permite conocer si el grado de acuerdo observado
se aleja o no del esperado al azar. Es decir, este índice pretende evaluar si la
clasificación ha discriminado las categorías de interés con exactitud significativamente
mayor a la que se hubiera obtenido con una asignación aleatoria. Un valor de k igual a 1
indica un acuerdo pleno entre la realidad y el mapa, mientras un valor cercano a 0
sugiere que el acuerdo observado es puramente debido al azar.
54
El estadístico k también puede calcularse para una determinada categoría de
interés, es el denominado k condicional, o puede ponderarse en función de algún
criterio definido por el usuario. Ya que no todas las confusiones son igualmente
importantes, p ej no es lo mismo que la confusión se produzca entre matorral y
matorral-arbolado, que entre matorral y cultivos. En consecuencia, se puede obtener un
valor ponderado de k, a partir de unos pesos wij que asigne el usuario en función de la
gravedad que estime si se produce confusión entre las categorías i y j, el nuevo valor de
k sería.
ˆ
w
i 1,n
ii
x ii / n w ij x i x i / n
i i ,n
1 w ij x i x i / n
i i ,n
Normalización de la matriz de confusión
Se emplea cuando se intenta comparar la fiabilidad de dos mapas con distinto
tamaño de muestreo. Consiste en un método iterativo que ajusta los totales de filas y
columnas a un valor común (+1), mediante sucesivos incrementos o reducciones en las
celdillas de la matriz. El proceso se detiene cuando los marginales de cada fila y
columna sumen +1, o un valor muy próximo.
Esta matriz ofrece una nueva medida de fiabilidad global. El valor medio de los
elementos de la diagonal indica el acuerdo entre filas y columnas, y en una situación
ideal todos los elementos diagonales de la matriz serían 1, mientras que una pobre
clasificación se muestra en valores diagonales muy bajos. Esta matriz normalizada
ofrece una visión complementaria, y permite compara matrices con distinto número de
muestras.
Verificación de análisis multitemporales
Se trata de ver la fiabilidad alcanzada por una interpretación de dos fechas
simultáneamente, lo que implica considerar la fiabilidad de cada fecha por separado y
de las dos en conjunto. Esto complica notablemente el análisis de las matrices de
confusión. Las dos novedades de estas matrices son:
-
El número de categorías pasa a ser el cuadrado del número de categorías en una
sola imagen. De modo que el número de celdas de la matriz será n4, siendo n el
número de clases en una sola imagen.
55
-
Al aumentar el número de categorías a verificar implica una mayor complejidad
en el muestreo, y habrá que aumentar notablemente el tamaño de las muestra
para poder verificar los cruces. En este caso, el muestreo estratificado o el
muestreo basado en información auxiliar puede ser una buena alternativa.
Para explicar mejor la estructura de una matriz de confusión multitemporal se
puede utilizar esta notación, donde 1 indica áreas detectadas como estables cuando
realmente lo son y el 2 áreas detectadas como un cambio que se corresponde con la
realidad. La suma de ambos indica la fiabilidad global.
Los errores se representan por 3, cuando zonas señaladas como estables son
estables pero en una categoría que no les corresponde, 4 identifica sectores en donde se
señalaron cambios cuando en realidad se mantuvo la misma categoría, el 5 determina
cambios reales no discriminados, y el 6 cambios incorrectamente clasificados.
56
TEMA10:CARACTERÍSTICASDELOSSENSORESACTIVOS:
RADARYLIDAR
1.INTRODUCCIÓN
El radar utiliza microondas, las cuales cubren el rango del espectro
electromagnético con longitudes de onda comprendidas entre 1cm y 1m. Gracias a estas
grandes longitudes de onda, en comparación con el visible y el infrarrojo, las
microondas tienen propiedades especiales. Pueden penetrar a través de nubes, lluvia y
polvo y no son susceptibles a la dispersión atmosférica. Estas propiedades permiten la
detección de energía de microondas bajo casi cualquier condición climática y ambiental.
Además, el uso de longitudes de onda mayores, que no se encuentran en los espectros
solar o terrestre, implica la necesidad de utilizar sensores activos, es decir, aquellos que
generan su propio flujo de radiación. Como los radares activos tienen su propia fuente
de energía, pueden funcionar durante el día o la noche y en condiciones de iluminación
controlables. Otra ventaja es que al ser un haz artificial puede manipularse la forma en
la que se emite para, así, obtener el máximo de información. Además, a diferencia de
los sensores ópticos, con los radares se pueden identificar características asociadas a la
rugosidad del terreno.
Algunas características de la superficie se pueden distinguir mejor en las
imágenes de radar:
-
hielo, ondas en la superficie del mar
-
humedad del suelo, cantidad de vegetación
-
objetos creados por el hombre, p ej edificios
-
estructuras geológicas
RADAR es el acrónimo del inglés de detección y localización por radio, RAdio
Detection And Ranking. Un sistema de radar tiene 3 funciones primordiales:
-
Transmitir señales de microondas (radio) hacia una escena
-
Recibir la porción de la energía transmitida, que se refleja hacia el sensor desde
la escena iluminada
-
Observar la potencia de la señal reflejada y el tiempo necesario para que la señal
regrese al sensor
57
2.RADARDEAPERTURASINTÉTICA(SAR)
Es un sistema de radar de iluminación lateral que produce una imagen de
resolución fina de la superficie bajo observación. Al moverse a lo largo de su
trayectoria, el radar ilumina hacia un lado de la dirección de vuelo franjas continuas y
paralelas entre sí y acumula la información de las microondas que se reflejan.
La distancia entre el radar y el objetivo en la superficie en la dirección
perpendicular al vuelo se llama alcance. La distancia a lo largo de la trayectoria se
conoce como azimut.
En un sistema de radar, la resolución tiene dos dimensiones, una en la dirección
del alcance y otra en la del azimut. La resolución en la dirección del alcance depende
de la longitud del pulso transmitido; un pulso corto proporciona mejor resolución. En
una radar convencional, por ejemplo en un radar de apertura real, la resolución en la
dirección del azimut se determina por el ancho angular del haz. Para que dos objetos
puedan ser identificados independientemente, deben estar separados en la dirección del
azimut por una distancia mayor al ancho del haz en el terreno.
La anchura del haz es inversamente proporcional a la longitud de la antena
(también denominada apertura), de modo que una mayor antena o apertura producirá un
haz más estrecho y una mayor resolución. La longitud de la antena está limitada a 1 o 2
m en aviones y a 10 o 15 m en satélites. Por este motivo el principal problema del radar
fue en principio su baja resolución espacial, que puede calcularse como:
Rs
H
donde Rs es la resolución, la longitud de onda, H la altura de observación y el
diámetro de la antena. Si el radar se coloca sobre un avión, la altura es reducida y se
58
obtienen resoluciones adecuadas, todo lo contrario ocurre en el caso de utilizar un
satélite para transportarlo.
Este problema se ha solventado con el uso del Radar de Apertura Sintética, SAR,
que sintetiza una antena virtual muy grande al grabar la fase de la señal de las
microondas que recibe. La longitud física de la antena de un SAR es corta pero
mediante modificaciones del registro de los datos y de las técnicas de procesamiento se
simula el efecto de una antena más grande.
Se envían pulsos de la señal a los mismos puntos de la superficie terrestre en dos
o más momentos distintos de la trayectoria del radar y la resolución que se obtiene es
equivalente a la que se obtendría si se utilizara una antena de longitud similar a la
distancia entre los pulsos.
3.BANDASDELRADAR
La mayoría de los radares operan con señales de longitud de onda comprendida
entre 5 cm y 75 cm. Estas microondas se clasifican de manera arbitraria en bandas
identificadas por letras. Las que se emplean más comúnmente son:
Banda-X: Ampliamente utilizada para el reconocimiento militar y a nivel comercial. Se
utiliza en el SAR CV-580 aerotransportado y en el satélite SIR-C.
Banda-C: Se utiliza en muchos SARs especiales, tales como el ERS-1 y RADARSAT.
Banda-S: Utilizada en el satélite ruso Almaz.
Banda-L: Se utilizó en el americano SEASAT y en el japonés JERS-1.
Banda-P: Es la más larga, utilizada en el aerotransportado AIRSAR de JPL/NASA.
Banda
(cm)
Frecuencia (GHz)
Ejemplos de sensores
Ka
0.8-1.1
40-26.5
Aerotransportados
K
1.1-1.7
26.5-18
Aerotransportados
Ku
1.7-2.4
18-12.5
Aerotransportados
X
2.4-3.75
12.5-8
SIR-C
C
3.75-7.5
8-4
ERS, RADARSAT, SIR-C
S
7.5-15
4-2
ALMAZ
L
15-30
2-1
JERS-1, SEASAT, SIR-C
P
30-100
1-0.3
Aerotransportados (AIRSAR)
59
La capacidad de penetración aumenta con la longitud de onda. De modo que a
los radares que operan con longitudes de onda mayores de 2 cm casi no les afectan las
nubes. Y a partir de los 4 cm tampoco les afecta la lluvia.
La longitud de onda del radar se selecciona de acuerdo a la escala del fenómeno
o de las características del terreno que se desean identificar, por ejemplo;
-
la banda-X para identificación de hielo y características de escalas relativamente
pequeñas
-
la banda-L para cartografía geológica, características grandes
-
la banda-P, la penetración de estas ondas es mayor por lo que se usan cuando
hay que penetrar el follaje.
4.APARIENCIADELASIMÁGENES
El brillo de las entidades de una imagen radar depende de la porción de la
energía transmitida que es retornada al radar. La magnitud e intensidad de esta energía
depende de cómo interacciona con la superficie, lo cual es función de varias variables o
parámetros. Estos parámetros incluyen características del sistema radar (frecuencia,
polarización, etc), así como de las características de la superficie (tipo de uso del suelo,
topografía, relieve, etc). Muchas de estas características están relacionadas y es
imposible separar las contribuciones individuales de cada característica. El brillo de las
entidades de una imagen es una combinación de varias de estas variables. Sin embargo,
estas características se pueden agrupar en 3 aspectos que controlan fundamentalmente la
interacción de la energía con la superficie, y que son:
-
la rugosidad de la superficie
-
la relación entre la geometría del radar y la de la superficie
-
el contenido en humedad de la superficie
La rugosidad es generalmente el factor dominante de los tonos, la brillantez de
una imagen de radar. Las superficies horizontales lisas reflejan casi toda la energía
incidente en forma especular, en una dirección alejándose del radar. Estas superficies,
llamadas especulares, como aguas tranquilas o autopistas, aparecen oscuras en las
imágenes de radar. Las microondas incidentes sobre una superficie rugosa se reflejan en
muchas direcciones. Esto se conoce como
reflexión difusa o esparcimiento. Las
superficies con vegetación causan reflexión difusa, y se presentan con tonos brillantes
en las imágenes de radar.
60
La rugosidad de una superficie reflectora se determina de manera relativa con
respecto a la longitud de onda del radar y al ángulo de incidencia. Generalmente, una
superficie se considera lisa si sus variaciones de altura son considerablemente menores
que la longitud de onda del radar. Para una longitud de onda determinada, una superficie
es relativamente más rugosa al aumentar el ángulo de incidencia. Cuando las
variaciones de altura de la superficie se aproximan al tamaño de la longitud de onda la
superficie aparecerá rugosa. En general, se define una superficie rugosa como aquella
que tiene variaciones de altura del orden de la mitad de la longitud de onda del radar. En
las imágenes radar las superficies rugosas aparecen más brillantes que las superficies
lisas, aunque estén compuestas de los mismos materiales.
Reflectores angulares
Algunos objetos pequeños pueden aparecer extremadamente brillantes en las
imágenes de radar, dependiendo de su configuración geométrica, son los reflectores
angulares. El lado de un edificio o un puente, combinado con reflexión procedente del
terreno es un ejemplo de reflector angular.
Dos superficies que se intersectan y forman un ángulo recto de cara al radar,
definen un reflector angular llamado diedro. La señal que regresa al radar a partir de un
reflector diedro es intensa, sólo cuando las superficies reflectoras tienen una orientación
casi perpendicular a la dirección de la iluminación.
Se pueden producir reflexiones más intensas con un reflector triedro. Estos están
formados por la intersección de tres superficies planas perpendiculares entre sí y
abiertas de cara al radar.
Los reflectores angulares se utilizan comúnmente en investigación porque al
colocarlos en unas posiciones determinadas pueden funcionar como puntos de
referencia en las imágenes radar.
También aparecen como puntos muy brillantes en las imágenes radar los objetos
hechos de metal, ya que es un material que incrementa la reflexión de las microondas.
Ejs.: barcos en el mar, puentes sobre el río, coches, etc.
Reflexión difusa por volumen
La reflexión difusa por volumen (esparcimiento por volumen) está relacionada
con procesos de reflexión múltiple dentro de un medio físico, como un maizal o las
copas de los árboles de un bosque. Este tipo de reflexión también puede ocurrir por
capas de suelo muy seco, capas de arena o hielo.La reflexión por volumen es importante
61
ya que influye en la retro-reflexión total observada por el radar. El radar recibe ambas
señales, la energía reflejada por la superficie y la reflejada por volumen.
Contenido en humedad
La presencia de humedad aumenta la constante dieléctrica de un material. La
constante dieléctrica influye en la capacidad del material para absorber, reflejar y
transmitir la energía de las microondas. Esto hace que la apariencia de materiales
idénticos pueda ser diferente, según la cantidad de humedad que contengan. La
reflectividad, y en consecuencia, la brillantez de la imagen de la vegetación y las
superficies naturales aumenta con el contenido en humedad.
5.DISTORSIONESDEUNAIMAGENRADAR
La dirección de observación de los radares es oblicua. En las fotos aéreas, los
objetos altos se observan desplazados radialmente alejándose del nadir. En las imágenes
de radar la distorsión del terreno es perpendicular a la trayectoria del vuelo o del
satélite, es decir, los objetos más altos se observan desplazados hacia el sensor.
La presencia de relieves modifica el ángulo de incidencia (ángulo que forma la
dirección de observación con la perpendicular al objetivo) de la señal de radar,
transforma la superficie real en superficie proyectada modificando las distancias y
además supone la presencia de sombras.
Sombra
62
La región de la superficie del terreno que no se ilumina por el radar se representa
como sombra en la imagen. Las sombras se presentan detrás de las cumbres, en la
dirección del alcance. Son indicadoras de la dirección de iluminación del radar. El
ángulo de incidencia (que es el ángulo entre la dirección de iluminación y la normal a la
superficie de la Tierra) aumenta al alejarse del radar en la dirección del alcance. Como
resultado, se inducen sombras más prominentes en las regiones más alejadas del radar.
Las sombras también proporcionan información sobre la escena, tal como la altura de un
objeto. Las sombras en las imágenes de radar son una clave importante en la
interpretación del relieve del terreno.
Escorzo
El escorzo consiste en la apariencia de compresión de aquellas características de
la escena que están inclinadas hacia el radar. Los efectos del escorzo disminuyen al
aumentar el ángulo de incidencia. Cuando el ángulo de incidencia se aproxima a 90º los
efectos del escorzo se eliminan prácticamente (aunque en este caso puede presentarse un
sombreado severo). Al elegir el ángulo de incidencia debe considerarse un equilibrio
entre la presencia de escorzo y de sombras en la imagen.
Inversión por relieve
Se produce cuando la energía reflejada por la porción superior de un objeto se
recibe antes que la que proviene de la porción inferior. En este caso, al procesar la
imagen, la parte superior del objeto se verá desplazada, o ‘puesta por encima’ de su
base. En general, la inversión por relieve es más dominante para geometrías de
visualización con ángulos de incidencia pequeños, como los de radares en satélites.
6.PROPIEDADESDELASIMÁGENESRADAR
Desvanecimiento y moteado
Son procesos inherentes, del tipo ‘ruido’, que degradan la calidad de la imagen.
El desvanecimiento se debe a la presencia de varias superficies en una misma célula de
resolución con una diferencia de posición en la dirección del alcance menor a una
longitud de onda.
El moteado aparece con una textura ‘sal y pimienta’. Añade una textura
aleatoria a la textura correspondiente a la escena. Es causado por una interferencia
constructiva y destructiva aleatoria que aparece en la imagen como moteado brillante y
oscuro. La interferencia constructiva produce una señal mayor que la media, resultando
63
en píxeles más claros. La interferencia destructiva produce una señal más baja que la
media, resultando en píxeles más oscuros.
La reducción de este efecto se puede conseguir de 2 formas:
-
Procesamiento de observaciones múltiples
-
Filtrado espacial.
El procesamiento de observaciones múltiples se refiere a la división del haz de
radar en varios sub-haces más estrechos. Cada una de estas observaciones también
estará sujeta a moteado, pero sumando y promediándolas todas para formar la imagen
final, se reduce la cantidad de moteado. Este procesamiento de observaciones múltiples
es hecho normalmente durante la adquisición de los datos.
Mientras que el filtrado espacial se realiza sobre la imagen final, en un entorno
de análisis de imágenes. .
7.ECUACIÓNRADAR
La ecuación radar proporciona una explicación de los parámetros del sistema, la
geometría de propagación y las propiedades de la superficie que determinan la potencia
de retorno del radar. La ecuación radar presentada es simplística porque no incluye los
efectos de polarización.
Cuando la energía es transmitida en el espacio en todas las direcciones, la
densidad de potencia (potencia por unidad de área) se define por la potencia transmitida
(PT) dividida por la superficie de una esfera con un radio igual a la distancia de alcance?
(RT) o 4R2T.
Power density at range R
PT
4R 2T
Sin embargo, los radares de iluminación lateral dirigen o concentran la energía
centrando o incrementando la potencia en la dirección deseada. Este incremento de
potencia se conoce como ganancia (G) de la antena (GT). La ecuación que define la
densidad de potencia en la superficie es
PS
PTG T
4R 2T
La cantidad total de energía interceptada por el objetivo es proporcional a la
superficie de este objetivo (AS). Alguna de la energía recibida por el objetivo es
absorbida () y el resto es reflejada (1-). El objetivo actúa como un transmisor que
radia energía en alguna dirección relacionada con el tamaño y la geometría del objetivo.
64
Esta dirección puede tener alguna ganancia gs hacia el sistema radar. Estos factores son
combinados en un único parámetro denominado ‘radar cross-section’ ().
=AS(1-)gS
La potencia total redireccionada hacia el receptor viene dada por
PT G T
( )
4RT2
La energía de retorno debe viajar la distancia desde el objetivo al receptor (RR),
por lo que para determinar la densidad hay que dividir nuevamente por 4R2R
1
PT G T
( )
2
2
4RT
4R R
Para definir la potencia total recibida por el sensor se introduce un nuevo
parámetro, la apertura efectiva A o el área de la antena que actúa como receptor AR.
PR
1
PT G T
(
)
2
4RT2
4R R
( A R )
Esta es la ecuación radar. La potencia total recibida es directamente
proporcional a la potencia transmitida (PT) e inversamente proporcional a la distancia.
Esta ecuación pone de manifiesto que la relación entre la señal recibida por la antena y
la transmitida es función de la ganancia, de las dimensiones de la antena, de la longitud
de onda utilizada, de la sección eficaz de la superficie iluminada y de la distancia que la
separa del sensor.
8.TIPOSDERADARES
El Convair-580 C/X SAR del Centro canadiense de teledetección, su objetivo
era la investigación experimental en aplicaciones de los sensores SAR, como
preparación a los futuros SAR para satélites. Es un radar plenamente polarimétrico en
las dos bandas. Ángulos de incidencia, de 5 a casi 90º.
Otro radar de avión es el STAR (Sea Ice and Terrain Assessment), también
canadiense, que fue de los primeros usados comercialmente en el mundo. Fue diseñado,
en un principio, para el seguimiento del hielo en el mar, y para análisis del terreno.
El radar AirSAR de la NASA, un avanzado SAR polarimétrico, que puede
recoger datos de las 3 bandas en todas las posibles combinaciones de polarización y con
un gran rango de ángulos de incidencia. .
65
Tras los avances y el éxito de los radares en aviones, el siguiente paso fue los
radares en satélites para complementar a los sensores ópticos. El SEASAT fue lanzado
en 1978, fue el primer satélite civil en llevar un sensor SAR. Esta geometría fue
diseñada en principio para observaciones del océano y los icebergs, pero al final
también se recogieron imágenes de zonas terrestres. Sin embargo, los pequeños ángulos
de incidencia provocaban escorzo e inversión del relieve en terrenos de gran relieve,
limitando su utilidad en estas zonas. Aunque este satélite sólo fue operacional 3 meses,
demostró la gran riqueza de la información que podía proporcionar un radar en satélite.
Estos éxitos llevaron a la Agencia Espacial Europea (ESA) a lanzar el ERS-1 y
ERS-2. Se diseñó en principio para aplicaciones de seguimiento de los océanos pero
también se ha empleado en gran número de aplicaciones en entornos terrestres. Aunque
sus ángulos de incidencia limitan su utilidad para algunas aplicaciones terrestres debido
a los efectos de la geometría. Los sensores de ERS-1 y ERS-2 puede funcionar
conjuntamente para proporcionar pares de imágenes para interferometría.
Después del ERS-1, la Nacional Space Development Agency de Japón lanzó el
satélite JERS-1. Produce imágenes con sombras ligeramente mayores que el SEASAT o
el ERS, porque el ángulo de incidencia es mayor, 35º. Pero, como consecuencia
también, las imágenes de este satélite son menos susceptibles a los efectos del terreno y
las geometrías. Además al usar la banda-L, con mayor longitud de onda, permite alguna
penetración a través de la vegetación y otros tipos de superficies.
Posteriormente, la agencia espacial canadiense lanzó el RADARSAT (1995),
que lleva un SAR de banda-C y polarización HH, con rangos que pueden variar de 35 a
500 km, con resoluciones de 10 a 100 m. Lo cual permite una cierta flexibilidad en la
resolución espacial, que también es posible en el ángulo de incidencia.
9.LIDAR
En instrumentos LIDAR aerotransportados, la distancia del sensor a cualquier
superficie reflexiva por debajo de la plataforma se determina midiendo el tiempo
transcurrido entre la generación del impulso y el retorno del mismo. Estos datos del
láser se combinan con la posición y orientación de la plataforma durante un postproceso para crear una nube de puntos georreferenciada que, esencialmente, constituyen
un modelo digital 3D de la superficie que se encuentra por debajo de la plataforma
utilizada.
66
Una técnica alternativa al método básico del láser en tiempo de vuelo consiste en
registrar toda la señal de retorno de los impulsos emitidos por el láser. La diferencia
entre estas dos propuestas se ve en la figura 1. Al capturar toda la señal, se obtiene
información detallada sobre la estructura vertical completa dentro del trazado del láser,
e incluso se puede registrar la topografía del terreno aunque exista una cubierta vegetal
que ofrezca escasa transparencia. Desde el punto de vista comercial y de producción
cartográfica, el hecho de poder determinar la superficie de la tierra por debajo de una
cubierta vegetal es interesante.
La denominación LIDAR aerotransportado se refiere a un equipo que consta de
un distanciómetro láser y de un espejo que desvía el haz de luz perpendicularmente a la
trayectoria del avión. Este desplazamiento lateral combinado con la trayectoria de
vuelo, permite realizar un completo barrido del terreno.
El sistema mide la distancia del sensor al terreno a partir del tiempo que tarda el
rayo de luz en alcanzar el suelo y regresar al sensor. Si se conocen las coordenadas y
ángulos del avión y del espejo, podemos calcular a partir de estos datos y de las
distancias medidas las coordenadas de los puntos.
El LIDAR funciona como un radar ordinario, solo que emite pulsos de luz en
vez de ondas de radio. El escáner está constituido por un transmisor láser que genera
pulsos ópticos, estes al entrar en contacto con un objeto son reflejados y recogidos a
través de un receptor óptico-electrónico. La velocidad de la luz es conocida, y un
contador de alta velocidad mide el tiempo de vuelo desde el inicio del pulso hasta el
momento en que es devuelto y finalmente este es convertido en la distancia desde el
escáner hasta el objeto.
El LIDAR aerotransportado trabaja en combinación con un sistema de GPS
diferencial (DGPS) y un sistema inercial de navegación (INS). EL DGPS calcula de
modo diferencial la posición de la aeronave en la tierra obteniendo precisiones
inferiores a 10 cm. Por otro lado, el INS informa de los giros del avión y de su
trayectoria.
Combinando la información del GPS y el INS y aplicando las técnicas
avanzadas de filtrado, se determina la posición y altitud precisas.
El procesado de la información de la posición de los puntos es realizado por una
unidad de grabación que combina las distancias medidas, el ángulo del espejo, la
posición del GPS y la información dada por el INS para cada pulso, y realiza una serie
67
de transformaciones haciendo la rotación y translación del alcance del láser desde la
coordenada local del avión hasta las coordenadas WGS84.
El conjunto de puntos con coordenadas conocidas, según el sistema, puede llegar
a 50000 puntos por segundo, desde una altitud máxima de 3000 m sobre el térreno. Para
cada pulso emitido se pueden detectar varios ecos, y para cada uno de ellos se registra
también la intensidad reflejada, proporcionando las alturas del terreno y las de la
vegetación.
El ángulo y la frecuencia del barrido lateral se pueden ajustar teniendo en cuenta
la altitud sobre el terreno y la velocidad del avión, de forma que la densidad de puntos
sobre el terreno sea la deseada. También es posible variar la divergencia del haz de luz
con lo que el diámetro de la superficie iluminada por cada pulso puede variar entre 20 y
100 cm dependiendo de la altitud de vuelo. Hay una serie de fórmulas para realizar estos
cálculos.
Actualmente ya existe un número considerable de sistemas comerciais LIDAR
en el mercado. Los parámetros de altura de vuelo, ángulo del haz, velocidad de escáneo,
velocidad de vuelo, etc., son determinantes para la densidad de puntos que se pretende.
Por lo tanto, será necesario planear cuidadosamente un vuelo según el tipo de proyecto,
atendiendo a los objetivos específicos de este.
La precisión de los datos depende de la configuración específica del sistema
LIDAR. Hoy en día se exigen precisiones verticales de por lo menos 15 cm y 0,3-1 m
horizontalmente. Algunos estudios revelan que se pueden alcanzar errores verticales
inferiores a 10 cm a una altitud baja de vuelo (p ej a 400 m).
La regulación de la densidad de puntos y el control de diversos parámetros
permiten detectar pequeñas diferencias en la altura y estructura de los puntos; identificar
el modelo del terreno en zonas densamente arboladas, aumentar la productividad de
generación del MDE en áreas elevadas, reducir el esfuerzo de post-proceso en suelos
descubiertos, y disminuir las dependencias sobre las condiciones atmosféricas, así como
reducir al máximo los trabajos de campo.
En el procesamiento de datos Lidar se distinguen 4 etapas en el proceso de
datos; cálculo de la trayectoria y orientaciones del sensor mediante el GPS diferencial y
el INS, generación de los archivos de puntos con coordenadas, clasificación de los
puntos y generación de modelos a partir de los puntos clasificados.
Al final de una campaña LIDAR se obtiene una colección de puntos con
coordenadas conocidas. Los puntos estarán situados tanto sobre el terreno como sobre
68
los objetos que se encuentran sobre él; vegetación, edificios, vehículos, etc. Para que
estos datos sean útiles es preciso clasificarlos o filtrarlos. Como el número de puntos es
muy grande es necesario disponer de herramientas para realizar la clasificación
automática de estos puntos. Para clasificar los puntos se puede utilizar su altura, la
intensidad reflejada,... Existen diferentes algoritmos para obtener el modelo digital del
terreno, MDT, pero todos se basan en la selección de los puntos más bajos en un
entorno.
69
TEMA11:TRATAMIENTOSPROPIOSDEIMÁGENESRADAR
1.REALCERADIOMÉTRICO
Métodos para mejorar las características radiométricas de una imagen, usando
filtros de reducción del moteado, filtros de realce espacial y mejoras visuales.
Reducción del moteado
El moteado es el factor dominante en las imágenes radar. Las imágenes
procesadas con pocas ‘observaciones’ presentan una distribución de las intensidades
muy asimétricas, debido al ruido asociado al moteado. Debido al moteado los píxeles se
agrupan en los límites extremos de la distribución de intensidades.
Normalmente se realiza una la reducción del moteado para mejorar el realce de
la imagen y los resultados de la clasificación. Para reducir el moteado se pueden usar los
filtros no adaptativos o preferentemente filtros adaptativos. Los filtros adaptativos
tienen en cuenta las propiedades locales de la retro-reflexión difusa del terreno, mientras
que los filtros no adaptativos no lo hacen.
El hecho de filtrar el moteado permitirá:
-
Una mejor identificación de los objetivos o blancos de una escena
-
Una segmentación automática de la imagen más fácil
-
La aplicación de las herramientas clásicas para el realce desarrolladas para
imágenes de sensores ópticos, tales como: detectores de bordes, clasificadores de
texturas y clasificadores en base a los píxeles.
Un filtro ideal para reducir el moteado debería reducir el moteado con una
pérdida mínima de información. En las áreas homogéneas, el filtro debería preservar la
información radiométrica y los bordes entre distintas áreas. En las áreas con cierta
textura, el filtro debe preservar la información radiométrica y la variabilidad de la señal
espacial, es decir, la información de textura.
Los filtros existentes para reducir el moteado se dividen en filtros de paso bajo
(filtro por la media y la mediana) y filtros adaptativos (filtro de Lee, de Frost, map
gamma,…):
Filtros de paso bajo.
Los filtros de paso bajo pueden utilizarse en imágenes SAR con áreas
relativamente homogéneas.
70
Un filtro de paso bajo básico es el filtro por la media, el cual reemplaza el valor
del píxel central en una ventana de tamaño fijo con el promedio del valor original de
éste y los demás píxeles dentro de la ventana. El filtro por la media degrada la
resolución de la imagen, por lo que tiene que decidirse entre reducción de ruido y
conservar los detalles finos y textura de la imagen.
El filtro por la mediana es un filtro suavizante de paso bajo no lineal, en el cual
el valor de cada píxel es reemplazado por la mediana de los niveles de gris en el entorno
del píxel. Este filtro está limitado porque no preserva detalles finos de la imagen por
ejemplo, sus bordes.
Filtros adaptativos
La técnica de filtrado utilizada más frecuentemente son los filtros adaptativos.
Este tipo de técnica puede usarse en áreas en las que se requiera conservar algunos
detalles y textura de la imagen. Algunas versiones de filtros de moteado adaptativos
usan una ventana de tamaño fijo, centrada en el píxel. Por un lado, se puede seleccionar
una ventana grande para minimizar la varianza de las estimaciones de los estadísticos
locales. Pero por otro lado, una ventana de tamaño grande podría incrementar la medida
de heterogeneidad local, de tal forma que la reducción del ruido se debilite. En estos dos
esquemas, debe decidirse entre la reducción del ruido y la capacidad de detectar los
detalles finos de la imagen. Diversos estudios han demostrado que los filtros adaptativos
y los detectores de bordes consiguen mejores clasificaciones que los filtros no
adaptativos.
Los filtros adaptativos (ej Map Gamma) reducen el moteado al mismo tiempo
que conservan los bordes. Estos filtros modifican la imagen basándose en estadísticas
extraídas del entorno local de cada píxel.
La mayoría de los filtros adaptativos requieren el cálculo del promedio local
observado y de la desviación estándar normalizada (coeficiente de variación). El filtro
adaptativo proporciona una estimación precisa del coeficiente de retro-reflexión de
áreas homogéneas (estacionarias). Además, conserva la estructura de los bordes y de la
textura en escenas no estacionarias.
Filtro Frost
Es un filtro simétrico circular donde el valor de gris resultante para el píxel
suavizado es
71
( p m p 2 m 2 ... p n m n )
x(t ) 1 1
( m 1 m 2 ... m n )
donde p1, …, pn son los niveles de gris de cada píxel en la ventana de filtrado, y m1,…,
mn son los pesos asociados a cada píxel. Estos pesos se obtienen de la siguiente forma
m(t)=exp(-A|t|)
donde A está dada por
Var ( z )
A K
2
z
(
t
)
donde t es la distancia del píxel central a sus vecinos, var(z) es la varianza y z-(t)2 es el
cuadrado del nivel de gris medio dentro de la ventana de filtrado, K es un factor de
amortiguamiento que depende de la imagen no filtrada y puede requerir realizar
experimentos de prueba para determinar su mejor valor. El valor por omisión es 1.
En regiones uniformes, el filtro de Frost actúa como un filtro por la media. En
regiones heterogéneas, actúa como un filtro de paso alto. De esta forma, el filtro
suavizará las regiones homogéneas y removerá el moteado, mientras que los bordes de
contraste alto y otros objetos conservarán su valor.
Filtro Lee
El valor del píxel sin moteado es la suma ponderada del valor del píxel central y
del valor promedio. El coeficiente de ponderación es función de la heterogeneidad local
del terreno medida en términos del coeficiente de variación. El filtro lee también
minimiza la pérdida de información radiométrica y textural. El algoritmo de filtrado está
dado por
xˆ (t ) z (t ) W (t ) z (t ) (1 W (t ))
donde
t es la coordenada del píxel
x(t) es el píxel filtrado
z(t) es el píxel observado en la imagen (es el píxel central dentro de la ventana de
filtrado)
z-(t) es la media de la intensidad dentro de la ventana de filtrado
w(t) es la función de pesos, que está dada por
C v2
W (t ) 1 2
C I (t )
72
donde CV es el coeficiente de variación del ruido y CI es el coeficiente de variación del
conjunto de datos, que a su vez están dados por
Cv
v
v
donde v es la desviación estándar del ruido y v- es la media del ruido
C I (t )
(z )
z (t )
(z) es una aproximación de la desviación estándar de la imagen, obtenida mediante la
desviación estándar de los píxeles dentro de la ventana de filtrado.
En una región homogénea el valor de la salida filtrado es un promedio lineal de
los píxeles de su vecindad, mientras que en regiones extremadamente concurridas, la
salida llega a ser el mismo valor del píxel de entrada. Aunque el filtro de Lee puede
preservar los bordes, el uso de ventanas muy grandes produce una pérdida de detalles en
la imagen. Los filtros de Lee y Frost funcionan de manera similar.
Filtro de Kuan
Tiene la misma forma que el filtro de Lee pero la función de peso está dada por
1 C v2 /C I2 (t )
w (t )
1 C v2
Filtro MAP Gamma
Se basa en la suposición de que la intensidad (sin moteado) de la escena tiene
una distribución gamma. Este filtro minimiza la pérdida de información textural aún
mejor que los filtros frost y lee en el caso de escenas con distribución Gamma, como
áreas arboladas, agrícolas y océanos.
Para aplicarlo se requiere un conocimiento a priori de la función de probabilidad
de la escena. Se asume que la reflectividad de la escena tiene una distribución gamma y
se establecen dos umbrales, Cu y Cmaz.
Algoritmo:
El nivel de gris resultante (R) para el píxel suavizado es:
R=I
para Ci menor o igual a Cu
R = (B*I + SQRT(D))/(2*ALFA)
para Cu < Ci < Cmax
R = CP
para Ci mayor que o igual a Cmax
donde:
73
NLOOK = Número de observaciones
VAR = Varianza en la ventana del filtro
CP = Valor de nivel de gris del pixel central
I = Nivel de gris medio en la ventana del filtro
Cu = 1/SQRT(NLOOK)
Ci = SQRT(VAR) / I
Cmax = SQRT(2)*Cu
ALFA = (1+Cu^2)/(Ci^2-Cu^2)
B = ALFA-NLOOK-1
D = I*I*B*B+4*ALFA*NLOOK*I*CP
Es decir, se distinguen 3 tipos de regiones según su heterogeneidad, cuando Ci es menor
o igual a Cu son regiones homogéneas por lo que el filtro devuelve el valor promedio,
cuando Ci es mayor o igual a Cmax, son regiones heterogéneas por lo que devuelve el
mismo valor de entrada, y entre Cu y Cmax son regiones intermedias por lo que
devuelve un valor intermedio.
Filtros de tamaño de ventana adaptativa
En estos filtros el tamaño de la ventana se ajusta automáticamente dependiendo
de las características de la región. Considera dos clases de reflectividad del terreno: la
clase homogénea, que corresponde a las zonas en las cuales los píxeles son constantes y
la clase heterogénea, que corresponde a las áreas con textura, bordes o algún punto
objetivo que se busque dentro de la imagen. La homogeneidad del terreno puede
estimarse a partir del coeficiente de variación, el cual está en función de la media y
desviación estándar de z(t) de la siguiente manera:
C
z
z (t )
Si C es menor o igual a la desviación estándar del ruido, la zona se considera
homogénea, en caso contrario se considera heterogénea.
En este algoritmo de ventana adaptativa se determina el tamaño de ventana más
adecuado; en una región homogénea, incrementa el tamaño de la ventana siguiente y en
74
regiones heterogéneas, lo reduce (esto dentro de unos límites máximo y mínimo
establecidos). Una vez que se ha determinado el tamaño de ventana más adecuado para
ese píxel se efectúa un filtro adaptativo (uno de los anteriores) para reducir el moteado.
Esta técnica elimina el problema de la mayoría de filtros de moteado adaptativos: el de
definir un tamaño de ventana fijo adecuado para toda la imagen.
Es decir, el valor del píxel sin moteado se estima mediante una subventana de la
ventana de procesamiento. El tamaño de la subventana varía en función de la
heterogeneidad local del terreno medida en términos del coeficiente de variación.
Cuanto mayor sea el coeficiente de variación más estrecha será la subventana de
procesamiento. Esto minimiza la pérdida de información radiométrica y textural.
Detección de bordes
La detección de bordes y de líneas son operaciones importantes en el
procesamiento digital de imágenes. Por ejemplo, en cartografía geológica interesa trazar
líneas, que pueden ser líneas de falla o estructuras estratificadas. Para este propósito, la
detección de bordes y de líneas son las principales técnicas de realce.
Los detectores de borde clásicos (ej Sobel) desarrollados para las imágenes de
los sensores ópticos, no son adecuados para las imágenes de SAR. Debido al moteado
estos filtros detectan más bordes falsos. Antes de usar estos detectores clásicos las
imágenes deben ser filtradas.
El Detector de Proporción de Bordes es apropiado para las imágenes de SAR y
no requiere prefiltrado, de modo que no se pierde información durante la fase de
prefiltrado. El detector de proporción de bordes es la proporción del promedio de los
valores del píxel en dos vecindades que no se sobreponen, situadas en los lados
opuestos del punto.
El nombre en inglés de este filtro es Likelihood Ratio Edge Detector, en el cual
la imagen es modificada usando una ventana móvil hecha de dos regiones R1 y R2 del
mismo tamaño n/2. Para cada localización, píxel (x,y), de la ventana, la expresión del
filtro es:
m (t ) m 2 (t ) log m 1 (t ) log m 2 (t )
x (t ) n log 1
2
2
donde t es la coordenada del píxel, x(t) es el píxel filtrado, n es el tamaño de la región 1
más la 2, m1 y m2 son las medias empíricas estimadas en las regiones R1 y R2.
75
Este filtro es óptimo para la detección de bordes porque da la mejor
compensación entre la probabilidad de detección de un borde y la probabilidad de una
falsa alarma. Sin embargo, este filtro es usado principalmente para extraer la
localización de los bordes cuando son los valores máximos de la imagen. Algunos
autores dicen que este filtro da errores en determinadas situaciones.
2.ANÁLISISDETEXTURA
La textura es la variación espacial de los tonos de una imagen. En una imagen
SAR, la textura tiene dos componentes: 1) variabilidad espacial en las propiedades de
reflexión difusa de la escena, 2) moteado.
Se han sugerido variables de textura basadas en estadísticas de primer orden
(media, desviación estándar, varianza) y estadísticas de segundo orden (basadas en la
matriz de co-ocurrencias).
Las medidas texturales de primer orden son calculadas a partir de los valores de
gris originales de la imagen y su frecuencia. En estas medidas no se considera la
relación entre los píxeles.
Las medidas de segundo orden son las que consideran la relación de coocurrencia entre grupos de dos píxeles de la imagen original y a una distancia dada.
Las medidas de tercer y más orden consideran las relaciones entre 3 y más
píxeles. Si bien su cálculo es teóricamente posible, no se implementan pues requieren
mucho tiempo de cálculo y su resultado es de difícil interpretación.
Medidas de primer orden
Aunque la textura ha sido típicamente una medida cualitativa, esta puede
mejorarse con algoritmos matemáticos. Algunos de estos algoritmos son:
-
distancia media euclidiana
-
varianza
-
oblicuidad
-
curtosis
La distancia media euclidiana viene dada por
( x c x ij )2
n 1
1/ 2
xij es el valor del ND para la banda espectral l y píxel (i,j) de una imagen multiespectral
xc es el valor del ND para la banda espectral l del píxel central de la ventana
76
n es el número de píxeles en la ventana
x
La varianza
ij
M 2
n 1
donde xij es el valor del ND del píxel (i,j), n es el número de píxeles en la ventana y M
es la media de la ventana móvil
La oblicuidad igual a
x
ij
M 3
( n 1)(V )3 / 2
donde xij es el valor del ND del píxel (i,j), n es el número de píxeles de la ventana, M es
la media de la ventana móvil y V es la varianza
x
La kurtosis es igual a
ij
M 4
( n 1)(V )2
donde xij es el valor del ND del píxel (i,j), n es el número de píxeles en la ventana, M es
la media de la ventana móvil y V es la varianza.
Medidas de segundo orden
La suposición es que la información textural de una imagen está contenida en la
relación espacial que los tonos de grises tienen entre ellos. Estas relaciones están
especificadas en la matriz de co-ocurrencia espacial (o de niveles de grises).
El método más común para medir la textura está basado en la Matriz de coocurrencia del nivel de gris (Grey Level Co-Ocurrence Matriz, GLCM). Esta matriz es
un histograma de los niveles de grises de dos dimensiones para un par de píxeles (píxel
de referencia y píxel vecino). La matriz de co-ocurrencia describe la frecuencia de un
nivel de gris que aparece en una relación espacial específica con otro valor de gris,
dentro del área de una ventana determinada.
En el ejemplo mostrado a continuación se toman los valores de gris de la imagen
en su totalidad para realizar los cálculos, dando como resultados un solo valor. Cuando
se trabaja con imágenes de mayores dimensiones se utiliza el procedimiento, que ya
vimos, de ventanas móviles.
0
0
1
1
0
0
1
1
77
0
2
2
2
2
2
3
3
La matriz de co-ocurrencia considera la relación espacial entre 2 píxeles,
llamados píxel de referencia y píxel vecino. P ej, si se escoge el píxel vecino que está
situado un píxel a la derecha de cada píxel de referencia, esto se expresa como (1,0): 1
píxel en la dirección x, 0 píxel en la dirección y. Se pueden utilizar diferentes relaciones
entre píxeles, p ej (-1,0) un píxel a la izquierda del píxel de referencia, (1,1) un píxel a la
derecha y un píxel abajo (en diagonal).
Vamos a utilizar un píxel de separación, pero cuando la ventana es
suficientemente grande se puede usar una separación mayor sin que haya diferencias en
la metodología de cálculo. La distancia de muestreo se selecciona en base al grosor o la
finura de las texturas presentes en la imagen. Para texturas finas sería óptima una
distancia corta de muestreo, mientras que para imágenes de textura grosera sería más
apropiada una distancia mayor. Una distancia de 1 píxel suele ser válida para
caracterizar diferentes grados de textura. Por lo tanto, vamos a calcular la matriz de coocurrencia (1,0) para la imagen prueba. Las posibles combinaciones de niveles de grises
para la imagen de prueba se presentan en esta tabla
(0,0) (0,1) (0,2) (0,3)
(1,0) (1,1) (1,2) (1,3)
(2,0) (2,1) (2,2) (2,3)
(3,0) (3,1) (3,2) (3,3)
La primera celda debe ser llenada con la cantidad de veces que ocurre la
combinación 0,0. Cuantas veces en el área de la ventana un píxel con valor de gris igual
a 0 (píxel vecino) está situado a la derecha de otro píxel con valor 0 (píxel de
referencia). Por lo tanto existen tantas matrices de co-ocurrencia como relaciones
espaciales, según se considere el vecino de arriba, el del costado o en diagonal.
Por lo tanto, la matriz de co-ocurrencia para la relación espacial será (1,0)
2
2
1
0
0
2
0
0
0
0
3
1
0
0
0
1
En esta matriz se cuenta cada píxel de referencia con su vecino de la derecha.
Pero el número de veces que aparece la combinación 2,3 no es el mismo que el que
78
aparece la combinación 3,2, por lo tanto la matriz no es simétrica respecto a la diagonal.
La simetría necesaria para el cálculo se logra si cada par de píxeles se cuenta dos veces,
una vez a la derecha y otra a la izquierda.
La forma más sencilla de obtener una matriz simétrica, en vez de contar dos
veces, es sumarle a esta matriz su matriz traspuesta. La matriz traspuesta se logra
intercambiando las filas y columnas de la matriz original.
2
2
1
0
0
2
0
0
0
0
3
1
0
0
0
1
2
0
0
0
2
2
0
0
1
0
3
0
0
0
1
1
4
2
1
0
2
4
0
0
1
0
6
1
0
0
1
2
+
=
Una vez obtenida la matriz simétrica, el paso siguiente es expresar esta matriz
como probabilidad. La definición más simple de la probabilidad es ‘el número de veces
que un evento ocurre, dividido por el número total de posibles eventos’:
P i,j
V i,j
N 1
V
i , j 0
i,j
donde i es el número de filas y j el de columnas, V es el valor de la celda i,j de la
ventana, Pi,j es la probabilidad de la celda i,j y N es el número de filas o columnas.
En la imagen de prueba el número total de posibles pares es 12, y para una
relación horizontal este número se duplica, 24. P. ej., la combinación 2,2 ocurre 6 veces
79
sobre 24 posibles, por lo que la probabilidad es 0,25. Esta ecuación transforma la matriz
de co-ocurrencia en una aproximación de tabla de probabilidad. Este proceso se
denomina normalización de la matriz. Se obtiene esta tabla, donde la suma de todos los
elementos debe ser 1.
0,166 0,083 0,042 0
0,083 0,166 0
0
0,042 0
0,25
0,042
0
0,042 0,083
0
En general, cuanto mayor es el número de la diagonal de la matriz de coocurrencia, más homogénea es la textura en esa parte de la imagen que está siendo
analizada. De esta matriz se pueden destacar una serie de aspectos:
Los elementos de la diagonal representan pares de píxeles que no tienen
diferencias en su nivel de gris.
Sumando los valores de la diagonal tenemos la probabilidad de que un píxel
tenga el mismo nivel de gris que su vecino.
Las líneas paralelas a la diagonal separadas una celda representan los pares de
píxeles con una diferencia de 1 nivel de gris. De la misma manera, sumando los
elementos separados dos celdas de la diagonal, tenemos los pares de píxeles con
dos valores de grises de diferencia. A medida que nos alejamos de la diagonal la
diferencia entre niveles de grises es mayor.
Sumando los valores de estas diagonales paralelas obtenemos la probabilidad de
que un píxel tenga 1,2,3 etc niveles de grises de diferencia con su vecino.
Esta suma de las diagonales se denomina vector de diferencia de nivel de gris,
GLDV Grey Level Difference Vector, que también es utilizado como una medida
textural en vez de la GLCM. De esta matriz pueden derivarse diferentes medidas
texturales:
Homogeneidad
Se calcula mediante esta ecuación
N 1
P
i , j 0
i,j
/1 ( i j )2
siendo P la probabilidad de co-ocurrencia de los valores de gris i y j para una distancia
dada. Así para los píxeles de referencia y vecino =0,0, el resultado es 0,166/1+(00)2=0,166. Para el elemento (0,1) tenemos 0,083/1+(0-1)2=0,0415. Sumando el
80
resultado para todos los elementos obtenemos el valor de la medida de Homogeneidad
para esta imagen y esta relación espacial.
Una forma más fácil de calcularlo es multiplicando la matriz de probabilidades
por la matriz de pesos. Estos pesos surgen de la ecuación anterior suponiendo una
probabilidad igual a 1.
Pesos
1
0,5
0,2
0,1
0,5
1
0,5
0,2
0,2
0,5
1
0,5
0,1
0,2
0,5
1
0,166 0,042 0,08
0
0,042 0,166 0
0
0,08
0
0,25
0,021
0
0
0,021 0,083
Suma de todos los elementos=0,807
Sumando todos los elementos de la matriz resultante obtenemos el valor de la
medida de homogeneidad. La homogeneidad es alta cuando la matriz de co-ocurrencia
se concentra a lo largo de la diagonal.
Contraste
Es lo opuesto a la homogeneidad, es decir, es una medida de la variación local
en una imagen. Tiene un valor alto cuando la región dentro de la escala de la ventana
tiene un alto contraste.
N 1
P
i , j 0
i,j
( i j )2
La matriz de pesos toma valores que crecen exponencialmente a medida que nos
alejamos de la diagonal.
Disimilaridad
Es similar al contraste, es alta cuando la región tiene un contraste alto
N 1
P
i , j 0
i,j
|i j |
Los pesos de la matriz de pesos crecen linealmente a medida que nos alejamos
de la diagonal.
GLCM media
81
La ecuación para su cálculo es la siguiente.
N 1
iP
i , j 0
i,j
Esta GLCM media es diferente a la media aritmética de los valores de grises de
la ventana, ya que el valor del píxel no es ponderado por su frecuencia sino por la
frecuencia de su co-ocurrencia en combinación con un determinado valor del píxel
vecino.
Desviación standard
Es la desviación estándar de los niveles de grises en la ventana.
i2
N 1
P
i , j 0
i,j
( i i )2
Esta medida se basa en la media y la dispersión alrededor de la media de los
valores de las celdas de la matriz de co-ocurrencia. No es igual a la varianza de los
niveles de grises de la imagen original porque utiliza la varianza de la combinación
entre píxeles de referencia y vecinos.
Entropía
Es alta cuando los elementos de la matriz de co-ocurrencia tienen relativamente
valores iguales. Es baja cuando los elementos son cercanos a 0 o 1.
N 1
P
i , j 0
i,j
ln(P i , j )
Cuanto más pequeño sea el valor de Pij, es decir, que la ocurrencia de esa
combinación de píxeles es poco común, el valor absoluto de ln(Pij) será mayor.
Correlación
( i i )( j j )
P
i,j
i , j 0
( i2 )( i2 )
N 1
El resultado es entre -1 y 1.
Esta ecuación se calcula de forma diferente a las anteriores medidas, por lo cual
la información que suministra es esencialmente distinta, por lo tanto puede ser usada en
combinación con otra medida textural. La correlación es más alta cuanto más
homogénea es la textura.
ASM Angular Second Moment
N 1
P
i , j 0
2
i,j
82
Esta medida da valores altos cuando la matriz de co-ocurrencia tiene pocas
entradas de gran magnitud, y es baja cuando todas las entradas son similares. Es una
medida de la homogeneidad local. También se usa como medida textural la raíz
cuadrada de esta ASM, que se denomina energía o uniformidad.
b es la imagen orinal y d y c las texturas de Homogeneidad derivadas de tamaños de
ventana de 5*5 y 25*25.
Se observa que el cuerpo de agua, que es una región homogénea de la imagen,
adquiere valores altos, representados en blanco. Ocurre lo mismo en algunos lotes
agrícolas grandes. En cambio, en la región ubicada al SO del cuerpo de agua, donde la
cobertura del suelo es muy heterogénea, los valores son bajos, sobre todo para la venta
de 25 píxeles de lado.
Todas estas imágenes de segundo momento angular, entropía, contraste o
correlación, se pueden emplear como bandas adicionales en los procesos de
clasificación.
3.TÉCNICASAVANZADAS
INTERFEROMETRÍA
Los datos de radar proporcionan una información rica que no se basa sólo en una
imagen derivada de la intensidad sino también en otras propiedades de los datos que
miden características de los objetos. Un ejemplo es la interferometría de radar, un
método de procesamiento avanzado que aprovecha la información de fase de las
83
microondas. La interferometría es el proceso por el cual imágenes radar de la misma
zona de la superficie terrestre son grabadas por antenas en 1)diferentes localizaciones o
2) diferentes tiempos. El análisis de los dos interferogramas resultantes permite una
medida muy precisa de cualquier punto x,y,z del par inteferométrico.
La interferometría SAR se basa en adquirir datos desde dos ángulos diferentes.
Estas dos medidas pueden ser desde dos radares colocados en la misma plataforma
separados por unos pocos metros. Esto recibe el nombre de single-pass interferometry o
interferometría de paso único. El primer SAR interferométrico de paso único es el
Shuttle Radar Topography Misión (SRTM). La interferometría también se puede
obtener usando un único radar que obtiene dos medidas en diferentes pasos de órbita
que están próximos pero se diferencian en un día o algo más. Esta es la metodología
usada por el SIR-C y ERS-1,2, y es llamada multiple-pass o interferometría de paso
repetido.
Los datos SAR interferométricos pueden proporcionar información topográfica
extremadamente precisa, tan precisa como los modelos digitales de elevación derivados
usando técnicas fotogramétricas tradicionales. La precisión puede estar en la escala de
la longitud de onda (X-2.4-3.8 cm, C-3.9-7.5cm, S- 7.5-15cm, L-15-30cm, P-30100cm). Pero además puede funcionar a través de las nubes y de noche.
Las imágenes SAR contienen información de distancia en forma de fase. Esta
distancia es simplemente el número de longitudes de onda de la radiación desde el
sensor a un punto determinado del suelo. Esta información de fase en una sola imagen
SAR está mezclada con ruido de fase debido a otros efectos. Por esta razón, es
imposible extraer justo la distancia de fase desde la fase total de una sola imagen SAR.
Sin embargo, si están disponibles dos imágenes SAR que cubre la misma área desde
puntos de mira ligeramente diferentes, la fase de uno puede ser restada de la fase de otro
para producir la diferencia de distancia de dos imágenes SAR. Esto es porque los otros
efectos de fase para las dos imágenes son aproximadamente iguales y se anulan cuando
son restadas. Lo que queda es una medida de la diferencia de distancia de una imagen a
la otra. A partir de esta diferencia y de la información de la órbita, la altura de cada
píxel puede ser calculada. Esto permite la producción de un Modelo Digital de
Elevaciones (DEM).
Además de información de altura también se puede obtener información sobre el
movimiento de la Tierra, del movimiento de glaciares, parámetros de las olas del
océano, movimientos debido a terremotos, de deslizamientos del terreno. Si se
84
mantienen constantes los ángulos de observación de múltiples adquisiciones de datos,
no habrá sensibilidad a la topografía y la interferometría puede ser usada para extraer
información sobre cosas que cambian en la escena. Así se puede obtener información
sobre la velocidad de los objetos que se mueven entre dos observaciones.
RADARGRAMETRÍA
La radargrametría es la estimación de medidas de distancia y altitud del terreno
para cartografía topográfica a partir de datos radar estereo. Es una alternativa a la
interferometría para calcular la altura del terreno. La elevación del terreno se deriva de
la representación estereoscópica de las imágenes del SAR. La radargrametría utiliza
imágenes tomadas con un paralaje perpendicular a la trayectoria (un paralaje mucho
mayor que el que se utiliza en interferometría).
La radargrametría trata de identificar cuánto se ha desplazado una característica
en una imagen en comparación con una segunda imagen. Las diferencias de paralaje que
pueden ser observadas en dos imágenes superpuestas son convertidas en diferencias de
elevación mediante relaciones geométricas simplificadas.
Generalmente es menos sensitiva que la interferometría. La baja sensibilidad de
la radargrametría proviene del hecho de que se necesita un cambio relativamente grande
en la topografía para mover una característica por un píxel, mientras que el mismo
cambio en topografía causará un cambio de fase de muchos radianes en un
interferograma.
Su limitación principal en SAR proviene del moteado, ya que el patrón de
moteado cambia con el paralaje, de modo que hace difícil correlacionar características
entre las dos imágenes. Además, al adquirir una misma escena desde diferentes
direcciones de observación o ángulos de incidencia, las imágenes resultantes pueden
parecer muy diferentes. Esto puede hacer que la visualización estereoscópica y la
coincidencia de puntos sea más complicada que en las imágenes ópticas.
POLARIMETRÍA
Polarización
La energía no polarizada vibra en todas las posibles direcciones perpendiculares
a la dirección de propagación. Las antenas radar envían y reciben energía polarizada.
Esto significa que el pulso de energía es filtrado de modo que la onda eléctrica vibre en
85
un único plano perpendicular a la dirección de propagación. La señal puede ser vertical
u horizontalmente polarizada.
Una onda es no polarizada si varía aleatoriamente durante la propagación de la
onda, una onda polarizada tiene un valor constante de durante la propagación de la
onda. Si =0 es una polarización lineal, es decir, E tiene una dirección fija durante su
propagación.
Cuando la energía transmitida es polarizada en la misma dirección que la
recibida, al sistema se le conoce como de polarización similar. HH cuando la energía
se transmite y recibe horizontalmente polarizada, y VV cuando la energía se transmite y
se recibe verticalmente polarizada.
Si la energía transmitida se polariza en una dirección ortogonal a la recibida, al
sistema se le conoce como de polarización cruzada. HV indica que la transmisión es
horizontalmente polarizada mientras que la recepción es verticalmente polarizada, y VH
al revés.
La reflexión de una onda de radar al chocar con una superficie puede modificar
la polarización, dependiendo de las propiedades de la superficie. Por esta razón, una
superficie puede representarse de forma distinta al recibir ondas con diferente polaridad
mediante un radar polarimétrico. Es decir, la polarización múltiple ayuda a identificar
las características de la superficie reflectora.
Polarimetría
El sistema SAR polarimétrico transmite con dos polarizaciones ortogonales de
modo que se generan 4 canales de datos. Cada uno de estos canales de polarización
tienen sensibilidades diferentes a las diferentes características de las superficies.
Además de grabar la magnitud de la señal retornada para cada polarización, para que un
radar sea polarimétrico tiene que grabar la información de fase de las señales de retorno.
Sino no obtendrá imágenes polarimétricas sino simplemente imágenes con multipolarización. El análisis de las combinaciones de polarización transmitida y recibida
constituye la ciencia de la polarimetría de radar.
Para representar la polarización de una onda se recurre a expresiones complejas
como el vector de Stokes, el vector de Jones o el ratio de polarización, que son función
de la amplitud del campo eléctrico en el eje x y en el eje x y de la diferencia de fase. Las
imágenes con multipolarización pueden analizarse con gráficos de ratios cross-polarized
y co-polarized.
86
Para analizar las imágenes polarimétricas se utiliza:
-
la matriz de dispersión. Es el conjunto de coeficientes de dispersión
polarimétricos. Es difícil obtener información útil de la matriz de dispersión
directamente, por lo que se usan varios métodos para extraer información de la
matriz de dispersión, como los basados en la covarianza, coherencia…
-
las firmas de polarización (polarization signatura) de cada superficie
E y O son la Elipticidad y la Orientación, que determinan la polarización, y P es
la potencial de la señal obtenida para cada polarización para esa superficie
- A partir de la firma de polarización se pueden obtener variables polarimétricas como la
‘pedestal height’
- Otras variables polarimétricas (grado de polarización, extremo del componente
totalmente polarizado, extremo del componente no polarizado, polarización
fraccional,…)
-Técnicas de clasificación específicas para imágenes polarimétricas basadas en esas
variables
87