CUDA Overview and Programming model - DCC
Anuncio

Departamento de Ciencias de la computación
Universidad de Chile
Modelado en 3D y sus Aplicaciones en Realidad Virtual
CC68W
CUDA Overview and Programming
model
Student:
Juan Silva
Professor:
Dr. Wolfram Luther
Date:
lunes, 22 de noviembre de 2010
Contents
Abstract ............................................................................................................................................... 3
Introducción ........................................................................................................................................ 3
Requerimientos ................................................................................................................................... 4
Conceptos generales ........................................................................................................................... 5
Objetivos de CUDA .......................................................................................................................... 5
Conceptos de programación ........................................................................................................... 5
Device .......................................................................................................................................... 5
Host ............................................................................................................................................. 5
Kernel .......................................................................................................................................... 5
CUDA Threads ............................................................................................................................. 6
Modelo de programación.................................................................................................................... 8
Modelo de memoria........................................................................................................................ 8
Registros ...................................................................................................................................... 8
Memoria local ............................................................................................................................. 8
Memoria compartida .................................................................................................................. 8
Memoria global (Dispositivo) ...................................................................................................... 8
Memoria Host (CPU) ................................................................................................................... 9
Runtime API y Driver API: .............................................................................................................. 10
Driver API................................................................................................................................... 10
Runtime API ............................................................................................................................... 10
Manejo de memoria ...................................................................................................................... 11
Alocar memoria en el dispositivo .............................................................................................. 11
Establecer valores de memoria en el dispositivo ...................................................................... 11
1
Liberar memoria del dispositivo................................................................................................ 12
Copia de datos ........................................................................................................................... 13
Ejecución de código en GPU.......................................................................................................... 14
Calificadores de función ............................................................................................................ 14
Ejecutando Kernel ..................................................................................................................... 15
Descomposición de los datos .................................................................................................... 16
Kernels de ejemplo .................................................................................................................... 16
Ejemplo de código ......................................................................................................................... 17
Sincronización ........................................................................................................................... 17
Proyecto ............................................................................................................................................ 18
Sistema usado para este proyecto ................................................................................................ 18
Entorno de trabajo ........................................................................................................................ 19
Problemas en la implantación del entorno de trabajo ................................................................. 19
Resultados de la comparación ...................................................................................................... 20
Conclusiones del proyecto ............................................................................................................ 21
Conclusiones generales ..................................................................................................................... 21
Referencias ........................................................................................................................................ 22
2
Abstract
El poder de procesamiento de hoy en día se basa en el uso de múltiples núcleos en un solo
procesador para aumentar el rendimiento y poder de cómputo, sin embargo, estos procesadores
involucran un gran costo debido a la tecnología involucrada, pues además del procesador, hay que
comprar memorias y placa madre compatible con el procesador por lo que se podría decir que son
poco escalables, por otro lado están las tarjetas de video que pueden funcionar bajo la mayoría de
los computadores actuales sin restricciones como procesador o placa madre, además estas
cuentan con múltiples procesadores pudiendo procesar miles de threads de forma paralela, otra
ventaja es que varias tarjetas de video pueden trabajar juntas en un solo computador y pueden
ser reemplazadas fácilmente. Es por este motivo que se crea CUDA, con el fin de aprovechar el
poder de cómputo de las tarjetas de video, teniendo una plataforma de cómputo extensible,
potente y de fácil uso.
Introducción
CUDA es el acrónimo para Compute Unified Device Architecture el cual es una arquitectura de
cómputo desarrollada por NVIDIA. CUDA es el motor de computo en unidades de procesamiento
graficas (GPUs) de NVIDIA el cual es accesible para programadores de software mediante variantes
de lenguajes de programación estándar. Los desarrolladores de software pueden usar C para
CUDA, el cual es el lenguaje de programación C con extensiones provistas por NVIDIA y con ciertas
restricciones, y compilar el código mediante un compilador escalable Open64 C para luego ser
ejecutado en tarjetas de video NVIDIA1.
CUDA aprovecha las ventajas de las tarjetas de video NVIDIA para procesar elementos dentro de
múltiples procesadores con miles de threads concurrentes, facilitando el uso y facilidad de
programación. NVIDIA apoyando y alentando la adopción de esta tecnología, ha sacado al
mercado varios servidores de cómputo llamados TESLA orientados a estaciones de trabajo para
Clusters y también para gran escala para Data Center, siendo estos promocionados por tener un
rendimiento comparable con el ultimo procesador quad-core del mercado consumiendo 1/20 de
energía y a un 1/10 del costo2.
En este trabajo se abordara el cómo programar sobre la plataforma CUDA, usando el sistema
operativo Windows 7 Profesional versión 64bits con Microsoft Visual Studio 2008 Profesional. Se
presentarán los problemas encontrados y las soluciones provistas para luego presentar el proyecto
de ejemplo desarrollado en CUDA.
1
2
http://en.wikipedia.org/wiki/CUDA
http://www.nvidia.com/object/tesla_computing_solutions.html
3
Requerimientos
Para desarrollar con tecnología CUDA es necesario conocer el sistema en el cual se está trabajando
y el sistema objetivo a desarrollar, estos puntos son importantes ya que el kit de desarrollo de
CUDA no implementa un sistema multi-plataformas por lo que es necesario descargar o compilar
las bibliotecas necesarias para determinado sistema. A continuación se presentan los
requerimientos mínimos para desarrollar sobre Sistema operativo Windows3.
Sistema operativo: Windows XP/Vista/7 32/64 bits.
IDE Recomendado: Microsoft Visual Studio 2005 o superior.
NVIDIA Driver para correr aplicaciones en CUDA.
CUDA Toolkit 32/64 bits.
Hardware recomendado:
NVIDIA GeForce 8 series o superior.
Cabe destacar que CUDA Toolkit trae un emulador incorporado en donde mediante las opciones
de preferencias, se puede ejecutar el código de GPU en la CPU del equipo, evitando tener que
forzadamente comprar una tarjeta de video para el desarrollo.
3
http://developer.nvidia.com/object/cuda_3_2_downloads.html
4
Conceptos generales
En esta sección se trataran los conceptos generales sobre CUDA, sus modelos de programación y
modelos de memoria4.
Objetivos de CUDA
Los objetivos de CUDA se basan en la escalabilidad que presentan las tarjetas gráficas de NVIDIA
donde escalan mediante el aumento de multiprocesadores con múltiples núcleos de trabajo lo
cual logra un total de núcleos de procesamiento del orden de
y donde cada núcleo de
procesamiento puede trabajar cientos de threads lo cual genera del orden de
de threads
para poder procesar datos. Otro punto considerado como objetivo es poder ofrecer de manera
sencilla y fácil de usar el poder de procesamiento y para esto se desea facilitar la computación
heterogenea de CPU + GPU.
Conceptos de programación
CUDA introduce varios conceptos de programación asociados a su arquitectura dentro de los
cuales se distinguen el Device, Host y Kernel.
Device
A la unidad de procesamiento grafica o GPU se le llama Device o dispositivo, pueden haber tantos
dispositivos como tarjetas de video tenga el computador distinguiéndose cada una por un
identificador, nombre y poder de computo.
Host
A la unidad central de procesamiento se le denomina Host, es en el Host donde se ejecuta
cualquier código deseado por el programado, sin restricciones y como complemento al código
ejecutado por el dispositivo.
Kernel
Los Kernel son fragmentos de código que se ejecutaran en paralelo dentro del dispositivo. Solo un
kernel es ejecutado a la vez y muchos threads son ejecutados por cada kernel. La principal
diferencia entre los threads de CUDA y los de CPU son que los threads de CUDA son
extremadamente ligeros, requieren un gasto de recursos muy pequeños para su creación y
pueden ser conmutados rápidamente, otro punto es que CUDA ocupa miles de threads para
obtener eficiencia mientras que CPUs de múltiples núcleos solo pueden usar unos pocos.
4
San Diego Supercomputer Center > Training > NVIDIA CUDA Workshop > Basic of CUDA.
http://www.sdsc.edu/us/training/workshops.php?status=past
5
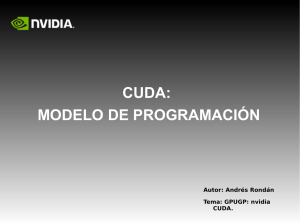
CUDA Threads
Un kernel de CUDA es ejecutado por un arreglo de threads, donde cada thread corre el mismo
código y se diferencian por un identificador o threadID el cual se usa para procesar direcciones de
memoria y tomar decisiones de control.
threadID
1|2|3|4|5|6|7|8
float x = input[threadID];
float y = func(x);
output[threadID] = y;
Ilustración 1: CUDA thread array.
Un kernel lanza una cuadricula de bloques de thread, threads dentro de un bloque cooperan via
memoria compartida o shared memory, threads dentro de diferentes bloques no pueden cooperar
entre sí. Esta característica deja a los desarrolladores escalar transparentemente mediante
diferentes GPUs.
Cuadricula
Bloque
thread 0
Bloque
thread 1
Bloque
thread 2
...
Bloque
thread n
...
Memoria
compartida
Memoria
compartida
Memoria
compartida
Memoria
compartida
Ilustración 2: Cuadricula de bloques de threads.
6
Cada bloque y cada thread pueden tener más de una dimensión. Un ID de bloque puede tener 1 y
2 dimensiones y cada ID de thread puede tener 1, 2 y 3 dimensiones como se muestra en la
ilustración 7. Esto simplifica el acceso a memoria cuando se procesan datos multidimensionales.
Dispositivo
Cuadricula
Bloque
(1,0)
Bloque
(2,0)
Bloque
Bloque
(0,1)Thread (1,1)
Thread
Bloque
(2,1)
Bloque
(0,0)
Bloque (1,0)
Thread
(0,0,0)
Thread
(1,0,0)
(2,0,0)
(3,0,0)
Thread Thread
Thread Thread
Thread Thread
Thread Thread
(0,0,1) (0,1,0)
(1,0,1) (1,1,0)
(2,0,1) (2,1,0)
(3,0,1) (3,1,0)
Thread Thread
Thread Thread
Thread Thread
Thread Thread
(0,1,1) (0,2,0)
(1,1,1) (1,2,0)
(2,1,1) (2,2,0)
(3,1,1) (3,2,0)
Thread Thread
Thread Thread
Thread Thread
Thread Thread
(0,2,1) (0,3,0)
(1,2,1) (1,3,0)
(2,2,1) (2,3,0)
(3,2,1) (3,3,0)
Thread
(0,3,1)
Thread
(1,3,1)
Thread
(2,3,1)
Thread
(3,3,1)
Ilustración 3: Dimensiones de cuadricula, bloques y threads.
7
Modelo de programación
CUDA establece un modelo de programación basado en la idea de Kernel, cuadricula o Grid,
Bloques y threads. Un kernel es ejecutado por una cuadricula la cual contiene varios bloques,
estos bloques son un conjunto de threads que pueden cooperar entre si compartiendo datos vía
memoria compartida y sincronizando su ejecución. Threads de diferentes bloques no pueden
cooperar entre si. Este punto es importante pues dependiendo de la complejidad del problema es
que pueden ser de utilidad pocos bloques de gran tamaño o varios bloques de tamaño pequeño.
Modelo de memoria
CUDA establece acorde a la arquitectura de la GPU varios modelos de memoria y cada uno con un
propósito y un fin distinto.
Registros
Los registros son los elementos más pequeños dentro de la arquitectura, estos registros se asignan
por thread y tienen un ciclo de vida igual al thread.
Memoria local
Al igual que los registros, la memoria local es asignada a cada thread y respetan el ciclo de vida del
mismo, sin embargo este tipo de memoria se encuentra físicamente en la memoria DRAM del
dispositivo.
Memoria compartida
La memoria compartida es asignada a cada bloque de threads y se encuentra físicamente en la
tarjeta de video. Esta memoria tiene un ciclo de vida igual al ciclo de un bloque.
Memoria global (Dispositivo)
Esta memoria es accesible por todos los threads al igual que el Host, la vida útil de este tipo de
memoria respeta los alocamientos y de alocamientos de memoria y es controlado por el
programador.
8
Memoria Host (CPU)
La memoria del host respeta los alocamientos y de alocamientos y no es accesible por los threads
de CUDA.
Bloque 0
Registro
Memoria
compartida
Memoria
local
Bloque 0
Bloque 1
Bloque 2
…
Bloque n
Bloque 2
…
Bloque n
Kernel 1
Bloque 0
Bloque 1
Memoria Global
Kernel 0
Ilustración 4: Modelo de memoria en CUDA.
9
Runtime API y Driver API:
Existen dos interfaces de programación de aplicaciones (API).
Driver API
La de más bajo nivel es la llamada Driver API la cual contiene funciones con prefijo
API tiene varias ventajas, dentro de las cuales se encuentran:
esta
No depende de bibliotecas de tiempo de ejecución o runtime library.
Posee más control sobre los dispositivos pudiendo, un thread de CPU, controlar múltiples
GPUs.
No existen extensiones C en el código del host, pudiendo asi usar cualquier otro
compilador de CPU del por defecto en el Host( ejemplo: icc, etc…)
Posibilita el uso de Parallel Thread eXecution (PTX) Just-in-Time (JIT) compilation.
Runtime API
La API de más alto nivel es la llamada Runtime API la cual contiene funciones con prefijo
esta API también tiene ventajas, dentro de las cuales se encuentran:
Facilita el manejo por código del dispositivo proveyendo inicialización implícita.
Provee manejo de contextos y manejo de módulos.
Más fácil de utilizar que Driver API.
Todo el código del dispositivo es idéntico usando una u otra API.
Por razones de simplicidad se explicara el uso de Runtime API.
10
Manejo de memoria5
Lo primero que hay que tener en cuenta es que tanto la memoria de uso de CPU y GPU tienen
distintos espacios. Lo segundo es que la memoria del dispositivo es manejada mediante código
desde el Host. El host puede alocar y liberar memoria, copiar datos hacia y desde el dispositivo y
administrar la memoria global del dispositivo.
Alocar memoria en el dispositivo
Alocar memoria en el dispositivo permite trabajar con datos y esto se realiza mediante la función:
𝒄𝒖𝒅𝒂𝑬𝒓𝒓𝒐𝒓_𝒕 𝒄𝒖𝒅𝒂𝑴𝒂𝒍𝒍𝒐𝒄 𝒗𝒐𝒊𝒅
𝒑𝒐𝒊𝒏𝒕𝒆𝒓, 𝒔𝒊𝒛𝒆_𝒕 𝒏𝒃𝒚𝒕𝒆𝒔
Esta función asigna a pointer la dirección de memoria alocada y aloca un tamaño de memoria
dictado por nbytes. Devuelve un código de error dictado por cudaError_t de existir alguno. Existen
variantes de esta función las cuales son:
cudaMalloc3D, cudaMalloc3DArray, cudaMallocArray, cudaMallocHost y cudaMallocPitch.
Establecer valores de memoria en el dispositivo
Establecer valores en memoria del dispositivo se realiza mediante la función:
𝒄𝒖𝒅𝒂𝑴𝒆𝒎𝒔𝒆𝒕 𝒗𝒐𝒊𝒅
𝒑𝒐𝒊𝒏𝒕𝒆𝒓, 𝒊𝒏𝒕 𝒗𝒂𝒍𝒖𝒆, 𝒔𝒊𝒛𝒆_𝒕 𝒄𝒐𝒖𝒏𝒕
Esta función recibe como parámetro una dirección de memoria en el dispositivo referenciada por
pointer, asigna los primeros count valores de la dirección de memoria el valor value. Otras
funciones similares son:
cudaMemsetAsync, cudaMemset2D, cudaMemset2DAsync, cudaMemset3D y
cudaMemset3DAsync.
5
http://developer.download.nvidia.com/compute/cuda/3_2/toolkit/docs/online/group__CUDART__MEMORY.html
11
Liberar memoria del dispositivo
Liberar memoria permite reutilizar espacios de memoria para un posterior uso, esto se realiza
mediante la función:
𝒄𝒖𝒅𝒂𝑭𝒓𝒆𝒆 𝒗𝒐𝒊𝒅
𝒅𝒆𝒗𝑷𝒕𝒓
Esta función recibe como parámetro una dirección de memoria en el dispositivo referenciada por
pointer para luego liberar la memoria del espacio indicado. Otras funciones similares son:
cudaFreeArray y cudaFreeHost.
Ejemplo de manejo de memoria
int total_ints = 1024;
int nbytes = total_ints*sizeof(int);
int *device_allocation = 0;
// Aloca nbytes en memoria y retorna la dirección mediante device_allocation
cudaMalloc( (void**) &device_allocation, nbytes );
// Establece en 0 todos los valores del espacio de memoria device_allocation
cudaMemset( device_allocation, 0, nbytes );
// Libera el espacio de memoria utilizado
cudaFree( device_allocation );
12
Copia de datos
Copiar datos permite rescatar resultados o pasar parámetros para el posterior uso, esto se realiza
mediante la función:
𝒄𝒖𝒅𝒂𝑴𝒆𝒎𝒄𝒑𝒚 𝒗𝒐𝒊𝒅 𝒅𝒔𝒕, 𝒄𝒐𝒏𝒔𝒕 𝒗𝒐𝒊𝒅 𝒔𝒓𝒄 , 𝒔𝒊𝒛𝒆_𝒕 𝒄𝒐𝒖𝒏𝒕,
𝒆𝒏𝒖𝒎 𝒄𝒖𝒅𝒂𝑴𝒆𝒎𝒄𝒐𝒑𝒚𝑲𝒊𝒏𝒅 𝒌𝒊𝒏𝒅
Esta función copia los count primeros bytes del área de memoria apuntada por src al espacio de
memoria apuntado por dst en la dirección que indique kind la cual puede ser:
cudaMemcpyHostToDevice: copia desde el Host al dispositivo.
cudaMemcpyDeviceToHost: copia desde el dispositivo al Host.
cudaMemcpyDeviceToDevice: copia desde un Dispositivo a otro Dispositivo.
Otras funciones similares son:
cudaMemcpy2D, cudaMemcpy2DArrayToArray, cudaMemcpy2DAsync,
cudaMemcpy2DFromArray, cudaMemcpy2DFromArrayAsync, cudaMemcpy2DToArray,
cudaMemcpy2DToArrayAsync, cudaMemcpy3D, cudaMemcpy3DAsync,
cudaMemcpyArrayToArray, cudaMemcpyAsync, cudaMemcpyFromArray,
cudaMemcpyFromArrayAsync, cudaMemcpyFromSymbol, cudaMemcpyFromSymbolAsync,
cudaMemcpyToArray, cudaMemcpyToArrayAsync, cudaMemcpyToSymbol y
cudaMemcpyToSymbolAsync.
13
Ejecución de código en GPU
Los Kernel son funciones en C con algunas restricciones, estas restricciones son:
Solo se puede acceder a memoria de GPU.
Debe tener retorno de tipo void.
No se aceptan argumentos variables ( varargs ).
No se acepta recursión.
No se aceptan variables estáticas.
Los argumentos de la llamada a función son automáticamente copiados desde la memoria de la
CPU a la memoria de la GPU.
Calificadores de función
Los Kernel deben establecer una calificación de la función que representa desde donde se puede
invocar la función. Así estos calificadores son los siguientes:
__global__ : Este tipo de función se invocan desde el interior del código del host y no
pueden ser llamados desde el código del dispositivo y solo pueden retornar void.
__device__ : Este tipo de función puede ser llamado desde otras funciones dentro del
código del dispositivo y no pueden ser llamadas dentro del código del host.
__host__ : Solo pueden ser ejecutadas y llamadas dentro del host.
Los calificadores __host__ y __device__ pueden ser combinados usando sobrecargas de función y
el compilador generara código tanto para CPU como para GPU.
14
Ejecutando Kernel
La sintaxis de ejecución de un kernel tiene en cuenta los parámetros de configuración de la
ejecución en el dispositivo dando así la siguiente sintaxis.
𝒌𝒆𝒓𝒏𝒆𝒍 <<< 𝒅𝒊𝒎𝟑 𝒈𝒓𝒊𝒅, 𝒅𝒊𝒎𝟑 𝒃𝒍𝒐𝒄𝒌 >>> 𝒂𝒓𝒈𝒔
Kernel es la función que se ejecutara dentro del dispositivo, dim3 grid son las dimensiones de la
cuadricula de ejecución (medidas en bloques) la cual puede tener 1 o 2 dimensiones, dim3 block
son las dimensiones de cada bloque (medidas en threads) dentro de la cuadricula y puede tener 1,
2 o 3 dimensiones y args son los parámetros de ejecución de la función kernel. Así la ejecución de
un kernel se puede expresar como:
dim3 grid(65535, 65535);
dim3 block(512, 512, 64);
// Llama a la funcion kernel para ser ejecutada en el dispositivo, devuelve inmediatamente.
kernel <<<grid, block>>>(args);
Todos los kernel calificados como __global__ y __device__ tienen acceso a las siguientes variables
definidas automáticamente.
dim3 gridDim: representa las dimensiones de la cuadricula en bloques.
dim3 blockDim: representa las dimensiones del bloque en threads.
dim3 blockIdx: representa el índice del bloque dentro de la cuadricula.
dim3 threadIdx: representa el índice del thread dentro del bloque.
15
Descomposición de los datos
Generalmente se querrá que cada thread dentro de un kernel acceda a diferentes elementos
dentro de un arreglo de datos. Es así como se presenta un ejemplo de la descomposición de los
datos dentro de un kernel.
Grid
blockIdx.x
Block 0
Block 1
Block 2
01234
01234
01234
0 1 2 3 4
5 6 7 8 9
10 11 12 13 14
blockDim.x = 5
threadIdx.x
blockIdx.x * blockDimx
+ threadIdx.x
Ilustración 5: Modelo de descomposición de datos.
Kernels de ejemplo
Algunos ejemplos de kernels sencillos se presentan a continuación:
__global__ void kernel_set( int* d_a)
{
*d_a = 13;
}
// Asigna a cada elemento del arreglo el valor designado por value
__global__ void assing( int* d_a, int value)
{
Int idx = blockDim.x * blockIdx.x + threadIdx.x;
d_a[idx] = value;
}
Cabe destacar que la penúltima línea de código, donde se declara la variable idx sigue un patrón
común dentro de los desarrollos y es debido al acceso a datos dentro de un arreglo mediante cada
thread, así cada thread accede a un solo dato dentro de un arreglo.
16
Ejemplo de código
A continuación se presenta un ejemplo de código que suma una constante a cada elemento de un
arreglo, se presenta el código de CPU y el código en CUDA.
Programa en CPU
void increment_cpu(float *a, float b, int N)
{
for(int idx = 0; idx < N; idx ++)
a[idx] = a[idx] + b;
}
Programa en CUDA
__gloabl__ void
increment_gpu(float *a, float b, int N)
{
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if( idx < N)
a[idx] = a[idx] + b;
}
…
…
void main()
{
…
increment_cpu(a, b, N);
}
void main()
{
dim3 dimBlock(blocksize);
dim3 dimGrid(ceil( N/ (float) blocksize));
Increment_gpu <<< dimGrid,
dimBlock >>> (a, b, N);
}
Sincronización
Todas las llamadas a kernel son asíncronas, por lo que estas devuelven el control a la CPU de
inmediato, además la llamada a kernel se ejecuta después de haber terminado todas las llamadas
previas de CUDA. Este punto es importante para el correcto acceso a datos, para esto CUDA
maneja una serie de funciones para poder sincronizar el código y dentro de estas la más útil y
simple de usar es la llamada a la siguiente función:
𝒄𝒖𝒅𝒂𝑻𝒉𝒓𝒆𝒂𝒅𝑺𝒚𝒏𝒄𝒉𝒓𝒐𝒏𝒊𝒛𝒆 𝒗𝒐𝒊𝒅
Esta función genera un bloqueo hasta que el dispositivo ha completado todas las operaciones
anteriores.
17
Proyecto
El proyecto de presentación consistió en la implantación del entorno de trabajo y el desarrollo de
una comparación de tiempo entre CPU y GPU de cálculo de cuadraturas presentando previamente
la información del dispositivo.
Sistema usado para este proyecto
A continuación se describe en detalle el sistema ocupado para el desarrollo del proyecto
Sistema operativo: Windows Vista 7 Professional 64bits.
IDE: Microsoft Visual Studio 2008 Professional.
CUDA Toolkit 64bits versión 3.2.
NVIDIA GeForce GTX 275 (Ver ilustración 1).
Procesador Intel Core i5 – 750 (Ver ilustración 2).
4GB Ram DDR3.
Ilustración 7: Detalle de CPU
Ilustración 6: Detalle de tarjeta de video.
18
Entorno de trabajo
Para empezar a desarrollar es recomendado tener instalado un entorno integrado de desarrollo,
con esto en mente se recomienda instalar Microsoft Visual Studio 2008. Luego es necesario
instalar el kit de desarrollo CUDA Toolkit 3.26 (ver ilustración 3).
Una vez instalado el Toolkit, se procede a instalar los proyectos de ejemplo llamados GPU
Computing SDK code samples7 (ver ilustración 4).
Ilustración 8: NVIDIA CUDA Toolkit installer.
Ilustración 9: GPU Computing SDK code samples installer.
Una vez instalados estos elementos se tiene un ambiente listo para desarrollar en CUDA.
Problemas en la implantación del entorno de trabajo
Debido las distinciones entre sistemas operativos de 32 y 64 bits, el montaje del entorno de
trabajo para 64 bits es complicado, la causa principal de esto es que los archivos de ejemplo
vienen con una configuración para entornos de trabajo de 32 bits y los archivos de configuración
no se encuentran debidamente escritos por lo que se debió recurrir a ayuda desde internet donde
se planteaban los mismos problemas. Además, al instalar todos los elementos recomendados y los
ejemplos existían conflictos por los archivos descriptores de compilación de código CUDA (*.rule)
que no se encontraban en el lugar que deberían por lo que se debió copiar a la ruta indicada.
6
7
http://www.nvidia.com/object/thankyou.html?url=/compute/cuda/3_2_prod/toolkit/cudatoolkit_3.2.16_win_64.msi
http://developer.download.nvidia.com/compute/cuda/3_2_prod/sdk/gpucomputingsdk_3.2.16_win_64.exe
19
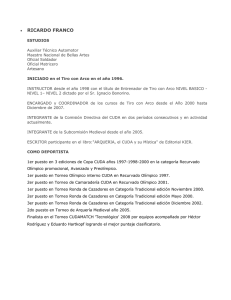
Resultados de la comparación
Una vez implementada la comparación, se precedió a ejecutar el código y registrar los datos. La
ejecución del código contemplo una iteración de 200 datos incrementales, estos datos fueron
generados al azar mediante la función rand() iniciando con un tamaño de 1 llegando a un tamaño
de 8.000.000. Primeramente se procedió a calcular la cuadratura de cada número dentro del
arreglo mediante GPU para luego medir el tiempo de cálculo mediante CPU de forma iterativa.
Los resultados de esta ejecución se muestran a continuación:
100
Procesamiento de cuadraturas mediante CPU
y GPU
Tiempo de procesamiento (ms)
10
1
0,1
0,01
0,001
1
512
3375
10648
24389
46656
79507
125000
185193
262144
357911
474552
614125
778688
970299
1191016
1442897
1728000
2048383
2406104
2803221
3241792
3723875
4251528
4826809
5451776
6128487
6859000
7645373
0,0001
Cantidad de numero procesados
GPU-Time [ms]
CPU-Time [ms]
Ilustración 10: Tabla comparativa de tiempos de procesamiento de datos.
20
De los datos obtenidos se calculó la desviación estándar de los tiempos de GPU, tiempos de CPU y
de la diferencia de tiempos, los datos son los siguientes:
Tiempos
GPU
CPU
Diferencia entre GPU y CPU
Desviación Estándar (ms)
0,209329566
12,07943149
11,91521632
Se puede observar del gráfico que antes de los 25.000 elementos la CPU procesa mucho más
rápido, sin embargo la GPU procesa con tiempos casi constantes en todo su trayecto. Se obtuvo el
porcentaje de la diferencia de tiempos desde que se cruzan las líneas y se obtuvieron los
siguientes resultados:
Porcentaje de diferencia
Promedio 92,22 %
Máximo
98,40 %
Mínimo
16,48 %
Conclusiones del proyecto
Como conclusiones del proyecto, se puede notar una notable ventaja por parte de la GPU en
cálculo de grandes arreglos de datos donde se puede encontrar una diferencia del 90%
aproximadamente, lo cual presenta una ventaja amplia respecto de solo el cómputo dentro de la
CPU. Si además le agregamos el poder de cómputo conjunto, se puede suponer un aumento del
rendimiento cercano a un 100%.
Conclusiones generales
CUDA presenta un modelo de programación y de memoria bastante simple y de fácil uso, que
facilita lidiar con procesamientos múltiples de datos y hace uso del poder de cómputo de la GPU,
por lo que logra potenciar el rendimiento general a un nivel bastante amplio. CUDA además
presenta un modelo escalable independiente al modelo de programación por lo que resulta un
esfuerzo muy pequeño o nulo el escalar el código.
21
Referencias
Wikipedia:
http://es.wikipedia.org/wiki/CUDA, http://en.wikipedia.org/wiki/CUDA
NVIDIA developer zone:
http://developer.nvidia.com/object/cuda_training.html
NVIDIA Cuda Home:
http://www.nvidia.com/object/cuda_home_new.html
Dr. Dobb’s – CUDA, Supercomputing for the masses:
http://www.drdobbs.com/high-performance-computing/207200659
NVIDIA TESLA product information:
http://www.nvidia.com/object/tesla_computing_solutions.html
NVIDIA CUDA Download
http://developer.nvidia.com/object/cuda_3_2_downloads.html
San Diego Supercomputer Center – Training
http://www.sdsc.edu/us/training/workshops.php?status=past
NVIDIA CUDA Library Documentation
http://developer.download.nvidia.com/compute/cuda/3_2/toolkit/docs/online/index.html
22