Cinemática del movimiento plano
Anuncio

INTRODUCCIÓN AL MOVIMIENTO PLANO
Índice
1. Introducción al movimiento plano
1.1. Definición cinemática de movimiento plano . . . . . . . . . . . . . . . . . .
1.1.1. Caso de Traslación pura . . . . . . . . . . . . . . . . . . . . . . . .
1.1.2. Caso de Rotación pura . . . . . . . . . . . . . . . . . . . . . . . . .
2
2
2
2
2. Polares o Curvas de rodadura
2.1. Propiedades de las curvas de rodadura . . . . . . . . . . . . . . . . . .
2.2. Determinación analítica de las curvas de rodadura . . . . . . . . . . . .
2.2.1. Isomorfismo del plano euclídeo y el plano complejo . . . . . . .
2.2.2. Campo de velocidades del movimiento plano y situación del CIR
2.2.3. Ecuaciones de la base . . . . . . . . . . . . . . . . . . . . . . . .
2.2.4. Trasformación compleja . . . . . . . . . . . . . . . . . . . . . .
2.2.5. Ecuaciones de la Ruleta . . . . . . . . . . . . . . . . . . . . . .
2.3. Determinación geométrica de las curvas de rodadura . . . . . . . . . . .
2.3.1. Perfiles conjugados . . . . . . . . . . . . . . . . . . . . . . . . .
2.4. Teorema de la Escuadra . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.1. Movimiento de la escuadra por una curva . . . . . . . . . . . . .
2.4.2. Teorema de la Escuadra . . . . . . . . . . . . . . . . . . . . . .
3
3
3
3
3
4
4
4
4
4
5
5
5
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3. Relación entre la velocidad de sucesión del centro instantáneo y la velocidad angular
5
4. Punto de velocidad equipolente a la de sucesión del centro instantáneo
4.1. Ejemplo del disco que rueda sin deslizar sobre una recta . . . . . . . . . .
6
6
5. Campo de aceleraciones
5.1. Fórmula del campo de aceleraciones . . . . . . . . . . . . . . . . . . . . . .
5.2. Componentes tangencial y normal de la aceleración . . . . . . . . . . . . .
5.3. Centro de aceleraciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
7
7
7
1
1.
Introducción al movimiento plano
1.1.
Definición cinemática de movimiento plano
Se dice que un sólido S0 tiene un movimiento plano respecto a otro S1 si las velocidades
de todos sus puntos son siempre paralelas a un plano fijo de S1 . Sea ~a un versor normal
a dicho plano.
M
d~a ∀M ∈ S0 , ∃~a (:
· ~a = 0 ∀t
= 0̄) v̄01
1
| dt {z
}
Fijo en 1
Para dos puntos cualesquiera A, B de S0 la fórmula del campo de velocidades es:
∀A, B ∈ S0 ,
A
B
v̄01
= v̄01
+ ω̄01 ∧ BA
Pre-multiplicando escalarmente por ~a se tiene:
A
B
~a ·v̄
~a ·v̄
a · (ω̄01 ∧ BA)
01 = 01 + ~
1.1.1.
= 0̄ = BA · (~a ∧ ω̄01 ),
∀A, B ∈ S0
⇒
ω̄01 = λ ~a
Caso de Traslación pura
Si λ(t) = 0
⇒
ω̄01 (t) = 0̄
Traslación pura permanente.
Su estudio es trivial por la sencillez del campo uniforme de velocidades.
1.1.2.
Caso de Rotación pura
M
Si λ(t) 6= 0 ⇒ vM D = v̄01
·
ω̄01
=0
|ω̄01 |
Rotación pura permanente.
M
N
∃ EIRMD ≡ πM (M; v̄01
) ∩ πN (N; v̄01
)
porque vM D = 0
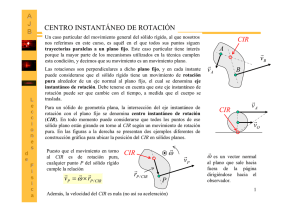
Por la estructura helicoidal del campo de velocidades
de este segundo caso en cualquier plano π perpendicular al vector ω̄01 se dan todas las velocidades posibles y
todas ellas contenidas en el plano (por tener ω̄01 dirección constante esto se produce de forma permanente).
Nos circunscribimos a dicho plano geométrico y consideramos sendos planos π0 (ligado al sólido móvil) y π1
(ligado al referente del movimiento) que coinciden geométricamente en π. El movimiento S0 /S1 es equivalente
al que tiene el plano π0 con respecto al plano π1 . Las ventajas de esta equivalencia se mostrarán posteriormente.
Consecuencias:
S0
S1
EIRMD
~a
C0
~t
~
N
C1
I
π
El EIRMD corta al plano π en un punto I denominado centro instantáneo de rotación
(CIR).
Las axoides del movimiento son cilindros de generatrices paralelas a ~a.
2
2.
Polares o Curvas de rodadura
Se llama base o polar fija a la intersección de la axoide fija con el plano π1 (coincide
con el lugar geométrico que describe el CIR en el plano π1 ).
Se llama ruleta o polar móvil a la intersección de la axoide móvil con el plano π0
(coincide con el lugar geométrico que describe el CIR en el plano π0 ).
2.1.
Propiedades de las curvas de rodadura
Sea I el CIR del movimiento S0 /S1 . Se tiene:
I
v̄M D = v̄01
= 0̄
Movimiento sin deslizamiento
Sea el mosquito (sólido 2) al que le gusta estar siempre en el centro instantáneo de rotación.
Por composición de movimientos se tiene:
I
I
I
v̄21
= v̄20
+ v̄01
= v̄ I (denominada velocidad de sucesión del centro instantáneo)
Sean C1 y C0 las polares fija y móvil respectivamente. Tomemos origen de arcos de ambas
en la posición inicial y sean s1 y s0 los parámetros longitud de arco respectivos. Por
definición, se tiene:
I I ( ~I
I
tC1 = ~tCI 0 = ~t I
Tangencia de las curvas de rodadura
v̄21 =v̄20
v̄21
= dsdt1 ~tCI 1
⇒
ds0 ~ I
I
v̄20 = dt tC0
s1 = s0 + Cte
Igualdad de arcos recorridos
Supongamos que π es el plano z = 0 de un sistema de referencia. Sean ω̄01 = λ~k la
velocidad angular y ~t I el versor tangente común a las curvas de rodadura en el CIR.
La componente de pivotamiento sería:
p
~ )N
~
ω̄01
= (ω̄01 · N
p
⇒ ω̄01
= 0̄ Movimiento sin pivotamiento
I
~
~
N = t ∧ ~a ⊥ ω̄01
Luego el movimiento plano consiste en una rodadura sin pivotamiento y sin deslizamiento. De aquí que a las polares se las denomine también curvas de rodadura.
2.2.
Determinación analítica de las curvas de rodadura
2.2.1.
2.2.2.
Isomorfismo del plano euclídeo y el plano complejo
ω̄
R2
↔ C
r̄ = x~ı + y~
↔ x + iy = zb
O
y↔ℑ
2
~
ω̄01 = ω01 k ⊥ R ⊲⊳ ω01 = ω̄01 · ~k ∈ R
r̄ ↔ ẑ
α
ω̄ ∧ r̄ ↔ i(ω̄ · ~k)r̂
ω̄01 ∧ r̄ ∈ R2
↔ i(ω̄01 · ~k)b
z∈C
ω̄ ~ π
O
ω̄ ∧v̄O
( |ω̄|
· k) 2
c = i bv01
OI = 01ω2 01
↔ OI
ω
01
x
↔
ℜ
01
α
Campo de velocidades del movimiento plano y situación del CIR
y1
I
y
M
I
d = iω01 IM
d
vb01
=b
v01
+ iω01 IM
˙
c = i (ξ˙ + iη̇) = 1 (−η̇ + iξ)
OI
θ̇
θ̇
x
(CVMP)
0
(CIR)
O
η
θ
O1
3
ξ
1
x1
2.2.3.
Ecuaciones de la base
d
d
c
O
1 I = O1 O + OI
2.2.4.
Componentes
⇒
Trasformación compleja
I
x1 = ξ −
yI = η +
1
ρ⌊α = ρ⌊β+θ = ρ⌊β 1⌊θ
zb1 = zb0 eiθ ⇒
⇒ zb0 = zb1 e−iθ Giro de ángulo − θ
2.2.5.
Ecuaciones de la Ruleta
η̇
θ̇
Geometría
⇒
y1I = η +
dη
dθ
dξ
dθ
y
ρ
x
β
θ
ρ
O
α
x1
O1
˙ ⇒
c 0 = OI|
c 1 e−iθ = 1 (cos θ − i sin θ)(−η̇ + iξ)
OI|
θ̇
I
ξ̇ sin θ−η̇ cos θ
I
x =
x =
θ̇
Componentes
Geometría
⇒
⇒
I
y I = ξ̇ cos θ+η̇ sin θ
y =
θ̇
2.3.
ξ̇
θ̇
y1
I
x1 = ξ −
dξ
dθ
sin θ −
dη
dθ
cos θ
dξ
dθ
cos θ +
dη
dθ
sin θ
Determinación geométrica de las curvas de rodadura
2.3.1.
N
Perfiles conjugados
0
2
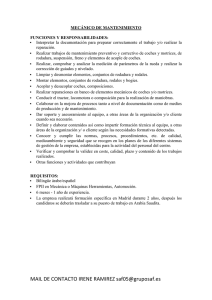
Se denominan Pareja de perfiles conjugados a
1 M
S0
una curva S0 del plano móvil y su envolvente S1
en el plano fijo o viceversa. Los casos degenerados
Q
S
1
también tienen interés, como pronto veremos.
Propiedad fundamental de los perfiles conjugados: la
C0
perpendicular común a una pareja de perfiles conjugados pasa por el CIR.
I
C1
Demostración:
Sea una escuadra NMQ (sólido 2) que se mueve de forma que su lado MN permanece
siempre normal en M a la pareja de perfiles conjugados en su punto de contacto. Por
composición de movimientos se tiene:
M
M
M
vb21
=b
v20
+b
v01
De las propiedades de los movimientos se concluye que:
)
M
vb21
k ~tSM1
M
M
d
~
v
b
k
t
⊥
MN
M
⇒ 01
⇒
vb20
k ~tSM0
M
d ⊥ IM
d
v01
b
= iω01 IM
~tSM = ~tSM ≡ ~t M (Envolvente e Involuta)
1
0
d k IM
d , M común ⇒ I, M, N alineados
⇒ MN
4
2.4.
Teorema de la Escuadra
N
0
2.4.1.
Movimiento de la escuadra por una curva
Q
1
M
Se tiene una escuadra NMQ (plano 0) que se mueve por un
plano 1 de forma que su lado MQ es siempre tangente una curva
S1 del mismo en M (y por tanto MN perpendicular a la curva
en M). A este movimiento le denominamos movimiento de la
escuadra por una curva. Coincide, obviamente, con el movimiento
del triedro intrínseco de una curva plana.
S1
Γ
γ
2.4.2.
Q
Teorema de la Escuadra
En el movimiento de la escuadra la base es la evoluta plana Γ de la curva S1 y la ruleta
es el lado normal MN de la escuadra.
Demostración:
M y S1 son una pareja de perfiles conjugados, y en la perpendicular común MN estará
el centro instantáneo.
MN y Γ son una pareja de perfiles conjugados y en su perpendicular común γQ estará el
centro instantáneo.
La intersección MN ∩ γQ = γ ≡ I (centro de curvatura).
El lugar geométrico que describe el punto I en el plano fijo 1 es la evoluta plana Γ de
la curva, que será la base del movimiento de la escuadra.
El lugar geométrico que describe el punto I en el plano móvil 0 es el lado normal NM
de la escuadra, que será la ruleta del movimiento de la escuadra.
Relación entre la velocidad de sucesión del centro
instantáneo y la velocidad angular
γ0
Sean C1 y C0 la base y la ruleta de un movimiento plano
genérico con CIR en I y Γ1 y Γ0 su evolutas planas respectivas.
Sea la escuadra NIQ (sólido 2) que se mueve con su vértice en I
por la base/ruleta.
( I
v
bI
v21 = iω21 γc
b
bI ⇒ ω21 = i Iγ
1I = v
d1
ω01 = ω21 − ω20
I
v I = iω20 γc
b
bI ⇒ ω20 = i vb
0I = v
20
ω01
d0
Iγ
1
1
= ib
v (
−
)
c1 Iγ
c0
Iγ
Γ0
N
C0
0
I
C1
Γ1
I
γ1
5
Q
2
1
3.
4.
Punto de velocidad equipolente a la de sucesión del
centro instantáneo
Si el movimiento plano no es una traslación pura, obligatoriamente hay un único
punto del movimiento π0 /π1 cuya velocidad es equipolente a la de sucesión del centro
instantáneo.
c=b
∃J ∈ S0 | vbJ ≡ b
vI
⇒
v J = iω01 IJ
b
vI
01
01
entrando con la relación entre la velocidad angular y la velocidad de sucesión nos queda:
vbI = (ii)b
vI (
4.1.
1
1 c
−
)IJ ⇒
c1 Iγ
c0
Iγ
1
1
1
=
−
c
c0 Iγ
c1
IJ
Iγ
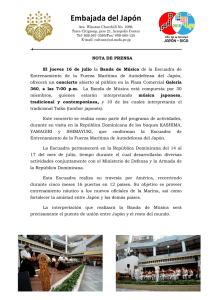
Ejemplo del disco que rueda sin deslizar sobre una recta
y1
Sistema de referencia ligado al disco:
O≡C
Ox y Oy
origen en el centro del disco
diámetros ortogonales del disco
y
Posicionamiento y Cinemática:
d
dO
1 C C
d
= ξ˙
O
b01
=
1 C = ξ + iR → v
dt 1
ang(~ı1 ,~ı) = −θ → ω01 = −θ̇
O1
ξ
C≡O
R
θ
I
Condición de no-deslizamiento:
I
C
c = (ξ˙ − Rθ̇) ⇒ ξ˙ = Rθ̇
v01
b
=b
0=b
v01
− iω01 CI
x1
x
Curvas de rodadura:
La determinación del CIR en este caso es más sencilla por consideraciones cinemáticas que
por geométricas. Una pareja de perfiles conjugados puede ser la circunferencia del disco
y el eje O1 x1 , por ser curva del plano móvil y su envolvente en el plano fijo. Una segunda
pareja de perfiles conjugados sería el punto M del la periferia del disco que coincide con
I en el instante en cuestión y su trayectoria en el plano fijo (la cicloide). Las normales a
ambas parejas serían respectivamente IC y O1 I. I ≡ IC ∩ O1 I.
La determinación geométrica de las curvas de rodadura es sencilla una vez conocida
la posición del CIR y sus lugares geométricos en ambos planos.
base: El punto I describe en el plano π1 el eje O1 x1 .
ruleta: El punto I describe en el plano π0 la periferia del disco.
Punto de velocidad equipolente a la de sucesión del centro instantáneo.
Usando la definición cinemática:
)
d
vbI = dOdt1 I = ξ˙ = Rθ̇
J
c ) ⇒ IJ
c = iR ⇒ J ≡ C
vI = b
b
v01
⇒ Rθ̇ = θ̇(−i
IJ
c
vbJ = −iθ̇ IJ
01
Usando la fórmula geométrica:
1
1
1
1
1
c = iR ⇒ J ≡ C
=
−
=
− ⇒ IJ
c
c0 Iγ
c1
iR ∞
IJ
Iγ
6
5.
Campo de aceleraciones
5.1.
Fórmula del campo de aceleraciones
Dada la fórmula de campo de velocidades:
d
v M = iω01 IM
b
01
vamos a obtener por derivación la fórmula para el campo de aceleraciones.
M
dω01 d
d [ d
db
v01
M
d
|1 = i
|1 IM + iω01 (O
v01
−b
vI ) =
1 M − O1 I)|1 = iα01 IM + iω01 (b
dt
dt
dt
M
J
d + iω01 (b
d + iω01 (iω01 IM
d − iω01 IJ)
c =
= iα01 IM
v01
−b
v01
) = iα01 IM
d − ω 2 (IM
d − IJ)
c = iα01 IM
d − ω 2 JM
d
= iα01 IM
M
b01
γ
=
01
5.2.
01
Componentes tangencial y normal de la aceleración
Como la velocidad de un punto es tangente a su trayectoria, la componente tangencial
es paralela a la velocidad de M. De la fórmula del campo de velocidades del sólido se
deduce que IM es perpendicular a la velocidad de M, luego la componente normal es
paralela a IM. Sea M’ la proyección ortogonal de J sobre IM. Se tendrá:
(
M
d − ω 2 JM
d′
(b
γ01
)t = iα01 IM
M
01
d − ω 2 (JM
d′ + \
γ01
b
= iα01 IM
M ′M ) ⇒
01
M
2 \
(b
γ01
)n = −ω01
M ′M
5.3.
Centro de aceleraciones
Se denomina centro de aceleraciones al punto H del plano 0 que tiene aceleración nula.
c − ω 2 JH
d=b
c = ω 2 (JI
c + IH)
c ⇒
H ∈ S0 | γbH = b
0 ⇒ iα01 IH
0 ⇒ iα01 IH
01
01
⇒
01
c
c = IJ
IH
1 − i αω01
2
β=arctan (
=
01
α01
)
ω2
01
c iβ cos β
IJe
M
d − ω 2 JM
d = iα01 (
c
d ) − ω 2 (
d
d
b01
γ
= iα01 IM
IH
+ HM
01
0 JH + HM) =
d −ω 2 HM
d
= iα01 HM
| {z } | 01{z }
d
d
⊥ HM
k HM
El campo de aceleraciones se comporta en cada instante como el de una rotación
alrededor del centro instantáneo de aceleraciones H, cuya localización directa está dada
por:
M
d −ω 2 HM
d = iα01 −ω 2 HM
d
b01
γ
= iα01 HM
01
01
7
⇒
d =
MH
M
2
b01
γ
ω01
+ iα01 M
=
γ01
b
2
4
2
ω01 − iα01
ω01 + α01