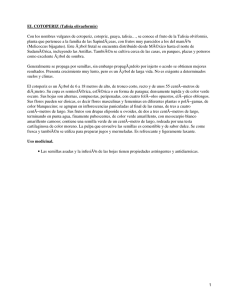
VIBRADOR DE MASA CENTRIFUGA ACCIONADO POR MOTOR
Anuncio

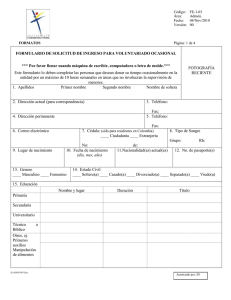
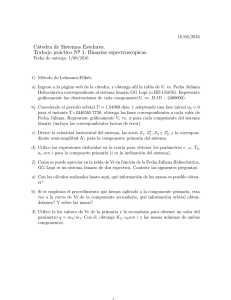
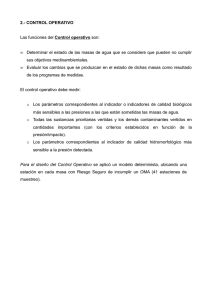
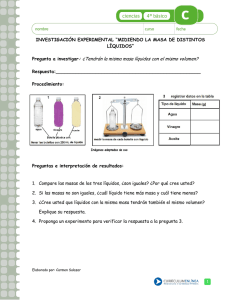
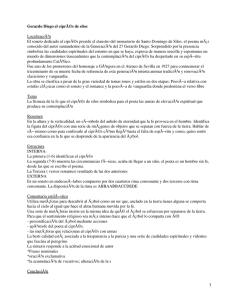
k OFICINA ESPAÑOLA DE PATENTES Y MARCAS 19 k kInt. Cl. : H02K 7/06 11 Número de publicación: 6 51 ESPAÑA k 2 132 718 B06B 1/16 TRADUCCION DE PATENTE EUROPEA 12 kNúmero de solicitud europea: 95934638.8 kFecha de presentación : 23.09.95 kNúmero de publicación de la solicitud: 0 730 792 kFecha de publicación de la solicitud: 11.09.96 T3 86 86 87 87 k 54 Tı́tulo: Vibrador de masa centrı́fuga accionado por motor. k 73 Titular/es: NETTER GMBH k 72 Inventor/es: Kröger, Dietrich k 74 Agente: Dávila Baz, Angel 30 Prioridad: 26.09.94 DE 44 34 221 Fritz-Ullmann-Str. 9 D-55252 Mainz-Kastel, DE 45 Fecha de la publicación de la mención BOPI: 16.08.99 45 Fecha de la publicación del folleto de patente: ES 2 132 718 T3 16.08.99 Aviso: k k k En el plazo de nueve meses a contar desde la fecha de publicación en el Boletı́n europeo de patentes, de la mención de concesión de la patente europea, cualquier persona podrá oponerse ante la Oficina Europea de Patentes a la patente concedida. La oposición deberá formularse por escrito y estar motivada; sólo se considerará como formulada una vez que se haya realizado el pago de la tasa de oposición (art◦ 99.1 del Convenio sobre concesión de Patentes Europeas). Venta de fascı́culos: Oficina Española de Patentes y Marcas. C/Panamá, 1 – 28036 Madrid 1 ES 2 132 718 T3 DESCRIPCION Vibrador de masa centrifuga accionado por motor. La invención se refiere a un vibrador de masa centrı́fuga accionado por motor, según el preámbulo de la reivindicación 1. Esta clase de vibradores de masa centrı́fuga está provista por regla general de accionamientos por motor eléctrico. También se denominan motores eléctricos desequilibrados, en forma similar a la expresión análoga “motores reductores con engranaje”, porque por lo general están diseñados como unidades de construcción compacta, en cuyas prolongaciones de la carcasa están integradas por lo general las masas centrı́fugas, igual que el engranaje en un motor reductor de engranaje. También se denominan vibradores de brida, porque la carcasa por lo general está provista de una brida de sujeción, mediante la cual la unidad de construcción compacta puede ser sujetada a la máquina o al dispositivo que deben ser sometidos a vibraciones con ayuda del vibrador. Los vibradores de masa centrı́fuga de la clase aquı́ descrita trabajan frecuentemente en un campo de números de revoluciones de hasta 25 Hz. Con frecuencia se exige también que se pueda variar el par de trabajo o la masa centrı́fuga útil. En especial con este fin, los vibradores de masa centrı́fuga conocidos tienen cada uno respectivamente masas excéntricas compuestas de dos o más partes, situadas sobre troncos de árbol prolongados hasta el exterior de la carcasa del motor; estas masas excéntricas se pueden enclavar entre sı́ en diferentes posiciones de ángulo de giro, para poder influir de este modo sobre la masa centrı́fuga resultante. Si ambas masas excéntricas son iguales, se anulan mutuamente en una posición de ángulo de 180◦, de modo que entonces no existe desequilibrio. Si se ajustan ambas masas para la misma posición de ángulo, se obtiene la fuerza máxima de vibración del aparato. Entre ambas posiciones es posible graduar un elevado número de posiciones de transición. Con el fin de lograr una configuración de construcción sencilla, la posibilidad de graduación de las masas excéntricas entre sı́ se configura generalmente de modo que una parte de la masa excéntrica esté colocada fijamente sobre el correspondiente tronco del árbol y solo la otra parte esté realizada en forma giratoria respecto a la primera, pudiéndose realizar el enclavamiento mutuo entre ambas, por ejemplo, entre las dos partes de la masa centrı́fuga. En el caso de una posibilidad de graduación de esta clase, al realizar la adaptación de la masa centrı́fuga se modifica la posición de ángulo del desequilibrio resultante en el árbol, de modo que en accionamientos con varios vibradores, por ejemplo para producir vibraciones orientadas y sincronizadas, se debe prefijar de nuevo el ajuste del ángulo de giro en el dispositivo de sincronización. Esto requiere un trabajo innecesario. Con el fin de conseguir una carga lo más simétrica posible sobre los cojinetes, los vibradores conocidos están provistos casi siempre de masas excéntricas o de pares de masas excéntricas en los extremos del motor de accionamiento. Esta forma de realización tiene adicionalmente la ventaja de que, por medio de 2 5 10 15 20 25 30 35 40 45 50 55 60 65 2 diferentes masas excéntricas o de diferentes posiciones de las masas excéntricas en ambos extremos, se pueden producir también movimientos de oscilación . Aplicaciones a tı́tulo de ejemplo de los vibradores de masa centrı́fuga considerados aquı́ son, por ejemplo, las máquinas pulidoras y los aparatos de desbarbar, en los que componentes mecánicos son sometidos a tratamiento en una artesa, o bien las cribas vibrantes. En un gran número de estos casos de aplicación, los vibradores para producir las vibraciones se montan en planos horizontales con posición de eje vertical, concretamente por lo general debajo de la pieza de trabajo del aparato correspondiente. En una posición de montaje de este tipo, las masas excéntricas superiores son casi siempre relativamente accesibles, por ejemplo para efectuar una graduación, después de desmontar una pieza de protección de la máquina. En cambio, en el caso de las masas excéntricas inferiores, esta accesibilidad resulta frecuentemente muy difı́cil. Desde el punto de vista de la construcción o diseño, esta accesibilidad resulta dificultada además porque los vibradores son relativamente largos, a causa de la disposición de masas excéntricas en ambos extremos del árbol, de modo que las masas excéntricas inferiores quedan situadas en la proximidad de la base de la máquina o bien, en el caso de aparatos relativamente grandes, tienen que ser colocadas en un foso realizado en el suelo, con el fin de facilitar el acceso a la zona de trabajo de estas máquinas, cuando es necesaria una altura de trabajo pequeña. Un motor vibratorio con las caracterı́sticas del preámbulo de la reivindicación 1 está descrito en el documento DE -OS- 22 00 170. Este motor tiene una longitud de construcción axial relativamente grande, que es más de tres veces mayor que la longitud de construcción necesaria para alojar el rotor y el estator, de los que depende la potencia del accionamiento. Esto es considerado como un inconveniente. Por los Resúmenes de Patentes de Japón “Patent Abstracts of Japan”, vol. 016, n◦ 240 (E1211) del 3 de Junio de 1992 y por el documento JP -A- 04 049 831 (C. I. KASEICO LTD) del 19 de Febrero de 1992 se ha dado a conocer un motor cilı́ndrico sin escobillas, que se puede utilizar como motor vibratorio. Este motor se caracteriza por tener una pequeña altura de construcción. El motor tiene un árbol que está apoyado en un cilindro hueco, que en uno de sus extremos tiene una brida que se extiende radialmente en dos escalones. A la brida está unido un cuerpo cilı́ndrico de soporte para el bobinado del estator. El árbol está unido en uno de sus extremos a dos piezas con forma de vaso, situadas concéntricamente, de las cuales la pieza interior sirve como soporte para los imanes. La pieza exterior rodea al cuerpo de soporte para el estator y puede ser parcialmente separada, si el motor tiene que ser utilizado para producir vibraciones. El inconveniente de este motor es que solo puede ser fabricado para potencias muy pequeñas, porque su configuración de construcción es relativamente complicada y prácticamente no es realizable para mayores tamaños de construcción y para grandes 3 ES 2 132 718 T3 potencias. Además, naturalmente la construcción especial del motor es esencialmente más cara, en comparación con motores normales. La presente invención tiene por objeto crear un vibrador de masa centrı́fuga de la clase mencionada al principio, en el que se han suprimido los inconvenientes antes mencionados, el cual por lo tanto puede ser fabricado con una longitud de construcción lo más pequeña posible, para una potencia prefijada, y además no requiere construcciones especiales del motor, sino que se pueden utilizar motores normalizados acreditados en la práctica, por lo menos en cuanto a los componentes decisivos para la potencia de accionamiento. Además, todos los trabajos de graduación en el vibrador, en caso de montaje vertical, deben poder ser realizados desde arriba, en su caso después de desmontar un revestimiento superior de la máquina, debiéndose mantener naturalmente también la posibilidad de variación de los pares de desequilibrio. Además se pretende poder realizar la variación de los pares de desequilibrio de forma que se mantenga la posición de ángulo resultante de la masa excéntrica para el árbol de accionamiento, con el fin de no tener que modificar el ajuste de accionamientos con varios vibradores para formas de vibración definidas especialmente, después de realizar una variación del desequilibrio. Este objeto se soluciona según la presente invención haciendo que por lo menos un cuerpo excéntrico tenga, en por lo menos un tronco del árbol, una parte situada radialmente en el exterior, que se extiende en sentido axial a través de la carcasa del motor y que puede girar alrededor de esta última, estando el centro de inercia de por lo menos un cuerpo excéntrico situado entre los cojinetes de soporte del cuerpo del rotor. Otras variantes y desarrollos ventajosos de la idea de la invención están descritos en las reivindicaciones dependientes 2 a 12. En los aparatos conocidos se procuraba por regla general, que las masas excéntricas colocadas en ambos extremos del árbol del motor de accionamiento no sobrepasaran el contorno exterior del motor, e incluso que quedaran más bien con su diámetro por debajo del contorno exterior del motor, por ejemplo para que las masas excéntricas pudieran ser incluidas en la carcasa prolongada del motor por motivos de seguridad, para obtener de esta forma una unidad de construcción con las medidas externas máximas a ser posible constantemente iguales. Esto ha sido realizado por lo general también en aquellos aparatos, cuyas masas excéntricas no necesitaban ser aisladas en un espacio cerrado de la máquina de aplicación. Si no se sobrepasa el contorno exterior del motor por medio de las masas excéntricas en las construcciones conocidas, estas últimas deben tener un grosor necesario para el respectivo par de trabajo, con lo cual se aumenta en la forma correspondiente la longitud total axial de construcción. Diferenciándose directamente de esta costumbre existente hasta ahora, la presente invención prevé aumentar el diámetro de las masas centrı́fugas y doblar hacia atrás sobre sı́ mismas por encima de la carcasa del motor, en extensión 5 10 15 20 25 30 35 40 45 50 55 60 65 4 axial respecto al aparato, las partes de los cuerpos excéntricos situadas radialmente en el exterior, que desarrollan la máxima efectividad a causa de la dependencia cuadrática de la distancia, haciéndolas girar alrededor de la carcasa. Por medio de esta realización se consigue directamente una menor longitud de construcción del vibrador, puesto que, debido a la mayor efectividad de las secciones de las masas excéntricas situadas radialmente más hacia el exterior, disminuye esencialmente la masa de las partes de sujeción en los troncos del árbol y se pueden reducir las dimensiones en su extensión axial. El diámetro del conjunto del vibrador aumenta ciertamente en la realización preconizada en la invención, pero esto no es ningún inconveniente en la mayor parte de los casos de aplicación. También serı́a posible un cierre de protección de las masas excéntricas rotativas, utilizando una carcasa superpuesta, que podrı́a estar unida a una brida de sujeción ampliada. Dado que los vibradores, sin embargo, en muchos casos de aplicación se montan en un espacio cerrado de una máquina de trabajo, en la realización preconizada en la invención no es necesario por lo general cerrar con una protección las masas excéntricas. También serı́a básicamente posible en la realización preconizada en la invención prever masas excéntricas en ambos extremos del árbol y también realizar estas masas divididas en dos partes, como ocurre en los aparatos ya conocidos. Ası́, por ejemplo, esta construcción en dos partes podrı́a estar configurada de modo que las partes radiales de ambas partes de la masa excéntrica estén situadas una tras otra sobre el tronco del árbol, igual que en el estado de la técnica, pero las partes axiales estén configuradas con un desplazamiento concéntricamente entre sı́, para poder hacer que coincidan entre sı́ en superposición de una sobre otra cuando se desplazan en sentido giratorio en direcciones opuestas. Las partes axiales de los cuerpos excéntricos pueden llegar desde ambos lados hacia atrás hasta casi el centro longitudinal de la carcasa, debiendo quedar entonces en el centro de la carcasa todavı́a espacio suficiente para prever allı́ una brida perimetral para la sujeción del vibrador. La configuración básica realizada según la invención, sin embargo, proporciona precisamente ahora la otra ventaja decisiva de que se puede renunciar a estas clases de configuración convencionales. En primer lugar por medio del doblado hacia atrás de la parte axial del cuerpo de masa excéntrica por encima de la carcasa, se puede reducir la carga sobre los cojinetes a través de los troncos del árbol del rotor en la forma correspondiente, igual que en los aparatos ya conocidos, incluso si se prevé un cuerpo de masa excéntrica solo en un extremo del aparato, si la parte axial del cuerpo de masa excéntrica está doblada hacia atrás por encima de la carcasa hasta una distancia adecuada, de modo que el punto de gravedad de la masa o bien el centro de inercia resultante en un plano de sección longitudinal a través del aparato quede entre los cojinetes, también en la realización según la presente invención, y pueda llegar incluso hasta cerca del centro entre los cojinetes, si se alarga axialmente en forma adecuada 3 5 ES 2 132 718 T3 el cuerpo de masa excéntrica. En una forma de realización de esta clase, los medios de sujeción en la carcasa deben ser desplazados hasta el extremo de la carcasa del motor que está más apartado del cuerpo de masa excéntrica. Pero, la configuración realizada según la invención ofrece además también la posibilidad de poder renunciar a la realización en dos partes en el sentido convencional, concretamente la posibilidad de desplazamiento mutuo en sentido giratorio de las dos partes, para conseguir la variabilidad de las masas excéntricas. De este modo se disminuye adicionalmente la longitud de construcción del aparato. Concretamente, debido a que en la realización preconizada en la invención la parte de la masa centrı́fuga que se extiende axialmente está colocada a una distancia relativamente grande del eje de giro del aparato, aumenta su efecto debido a la dependencia cuadrática de la distancia, de modo que en la realización según la presente invención es decisiva que esta distancia axial, situada radialmente en el exterior, del cuerpo de masa excéntrica, que determina el desequilibrio total resultante. Por lo tanto, las variaciones en esta parte situada radialmente en el exterior tienen una influencia correspondientemente grande sobre el par de trabajo resultante. Para la variación de la masa excéntrica, por lo tanto, está previsto en una forma preferida de realización según la presente invención realizar unas escotaduras en la parte axial situada radialmente en el exterior del cuerpo de masa excéntrica, en las cuales se pueden introducir masas adicionales cuando sea necesario. Estas escotaduras se extienden convenientemente en sentido axial, partiendo desde el lado frontal exterior del vibrador hasta el interior de la parte axial de la masa excéntrica, de modo que los pesos adicionales pueden ser introducidos sin esfuerzo desde el exterior en sentido axial en el cuerpo de masa excéntrica. Si el vibrador está montado verticalmente y el cuerpo de masa excéntrica está situado arriba, las masas adicionales pueden ser introducidas en el cuerpo de masa excéntrica no solo en forma sencilla, dada la accesibilidad al aparato asegurada desde arriba, sino que además incluso no necesitan ninguna sujeción especial, puesto que debido a la fuerza centrı́fuga son mantenidas constantemente en contacto con la pared exterior de la escotadura en el cuerpo de masa excéntrica y no se pueden salir tampoco hacia arriba desde el cuerpo de masa excéntrica. Las escotaduras están configuradas convenientemente en forma cilı́ndrica, de modo que como masas adicionales se pueden introducir cuerpos cilı́ndricos simples con medidas ajustadas a estas escotaduras. Se ha comprobado que en una realización especial según la presente invención, por medio de esta medida se puede duplicar o reducir a la mitad el par de trabajo. Un margen de esta clase es por lo general suficiente. Utilizando cuerpos encajables con una masa especı́fica diferente, es posible realizar una adaptación adicional. Para agotar en gran parte la posibilidad de una variación de la masa en esta forma, es conveniente prever a lo largo del segmento del contorno ocupado por el cuerpo de masa excéntrica una serie de escotaduras, de manera que opcionalmente 4 5 10 15 20 25 30 35 40 45 50 55 6 se pueden introducir o sacar una o varias masas adicionales. Para ello, las escotaduras se deben prever preferentemente en posición simétrica respecto al punto de gravedad efectivo de la masa excéntrica, de modo que se pueden introducir y sacar masas adicionales también simétricamente respecto al mismo, para no tener que modificar el ángulo del punto de gravedad de la masa del cuerpo de masa excéntrica respecto a la posición de giro del eje de accionamiento, según se desea en forma preferente. En el caso de una extensión axial correspondiente de la parte axial del cuerpo de masa excéntrica, es posible también con esta forma de realización realizar movimientos oscilantes, colocando en las escotaduras masas adicionales que se extienden solo a lo largo de una determinada zona de la escotadura axial. El espacio que queda puede ser mantenido libre por medio de distanciadores o similares. En una forma preferida de realización con un único cuerpo de masa excéntrica, situado solo sobre un muñón del árbol y previsto para su montaje vertical, un vibrador configurado de este modo según la presente invención cumple todas las exigencias mencionadas al principio. Para el montaje vertical, el cuerpo de masa excéntrica se debe prever en el extremo superior del vibrador, extendiéndose hacia abajo el cuerpo de masa excéntrica con su parte axial hasta sobrepasar el centro longitudinal de la carcasa. En la forma correspondiente, en el extremo inferior de la carcasa están previstos medios de sujeción del tipo de bridas, distribuidos por su contorno, cuyas superficies de apoyo quedan orientadas hacia abajo. El hecho de que en el tronco inferior del árbol no hay ninguna masa excéntrica, puede ser aprovechado para prever aquı́ en el extremo de la carcasa de forma sencilla un transductor angular para fijar el ángulo de la posición. En un vibrador configurado de esta forma, montado en posición vertical en un aparato de trabajo, se pueden realizar de forma sencilla desde arriba todas las medidas de graduación en las masas excéntricas. A continuación se explica detalladamente y de forma adicional la invención por medio de un ejemplo preferido de realización de un vibrador de masa centrı́fuga para montaje vertical, por medio de los dibujos adjuntos, en los que se muestran: - en la figura 1 una sección axial a través de un vibrador de masa centrı́fuga; - en la figura 2 una vista lateral del vibrador de la figura 1; - en la figura 3 una vista lateral girada en 90◦ respecto a la de la figura 2; y 60 65 - en la figura 4 una vista desde arriba sobre el vibrador de la figura 1. El vibrador de masa centrı́fuga accionado por motor representado en sección longitudinal en la figura 1 tiene una carcasa 2 del motor, con una envoltura 4 esencialmente cilı́ndrica para la carcasa y con dos tapas 6 en los lados finales de la carcasa, que tienen cada una un cojinete de rodamientos 8. La envoltura 4 de la carcasa tiene 7 ES 2 132 718 T3 en el interior zapatas polares 10 del estator, que están rodeadas por bobinados 12 del estator. En los cojinetes de rodamientos 8 está apoyado en forma giratoria el inducido o rotor 14 del motor, que tiene un cuerpo de rotor 16 que está provisto en sus extremos opuestos entre sı́ de troncos 18 y 20 del árbol, por medio de los cuales se apoya el inducido 16 en los cojinetes 8. En su extremo inferior, la envoltura 4 de la carcasa está provista de una placa de brida 22 en todo su contorno, configurada en forma rectangular en el ejemplo de realización, la cual está apoyada además respecto a la carcasa por medio de nervios de refuerzo 24. La placa de brida 22 está provista además de orificios roscados 26 (figura 4), que sirven para la sujeción del vibrador en su lugar de colocación. En el extremo superior del tronco superior 18 del árbol está situado un cuerpo de masa excéntrica 30, que está unido por medio de una unión de cuña 28 fijamente, a prueba de giro, al tronco 18 del árbol, según se ve en la figura 4. El cuerpo de masa excéntrica 30 tiene una parte radial 32, que está configurada esencialmente como disco con forma semicircular, según puede verse en la figura 4, pero que está ensanchada en forma de triángulo en la zona del punto central del cı́rculo, para poder disponer en la zona central del cı́rculo del material suficiente para un taladro para la sujeción sobre el tronco18 del árbol. Además, el cuerpo de masa excéntrica 30 tiene una parte axial 34, que está configurada con forma de envoltura semicilı́ndrica, según puede verse en especial en las representaciones de las figuras 2 y 3, estando representada en la figura 3 una vista girada en 90◦ respecto a la de la figura 2 en la misma posición del cuerpo de masa excéntrica 30. La parte axial 34 está unida en el ejemplo de realización por medio de tornillos a una parte perimetral 36 con forma de anillo circular situada radialmente en el exterior de la parte radial 32 del cuerpo de masa excéntrica 30 (figura 1). Los orificios 38 para tornillos previstos para ello pueden verse en la vista desde arriba de la figura 4. Por las representaciones de los dibujos puede verse claramente que en el ejemplo de realización, la parte radial 32 del cuerpo de masa excéntrica 30 está configurada como disco con un grosor relativamente pequeño, mientras que por el contrario el grosor de la parte de la envoltura cilı́ndrica de la parte axial 34 del cuerpo de masa excéntrica 30 es esencialmente mayor y por lo tanto está configurado con una masa más grande. Esta masa de rotación de la parte axial 34, situada radialmente y relativamente extendida hacia el exterior, determina de forma decisiva el desequilibrio del vibrador. Además, especialmente en las figuras 1 y 2 se puede ver claramente que la parte axial 34 del cuerpo de masa excéntrica 30 se extiende en sentido axial hasta sobrepasar el centro longitudinal de la envoltura 4 de la carcasa, concretamente hasta muy cerca de los nervios de refuerzo de la placa de brida 22, con lo cual el punto de gravedad de la rotación del cuerpo de masa excéntrica 30 está desplazado hasta una zona axial situada entre los cojinetes de rodamientos 8. De este modo, a pesar de que el cuerpo de masa excéntrica está apoyado en forma volante en uno de los lados, se 5 10 15 20 25 30 35 40 45 50 55 60 65 8 obtiene una carga relativamente uniforme sobre ambos cojinetes 8. Por la figura 4 puede verse que el cuerpo de masa excéntrica 30 tiene una corona de escotaduras en forma de taladros axiales 40, de los que solo uno está indicado mediante lı́neas de trazos intermitentes en la representación en sección de la figura 1, no coincidiendo su posición exactamente con una de las posiciones de la figura 4, debido a una simplificación de la representación en el dibujo. En la representación de la figura 4 están introducidas en forma ajustada masas adicionales cilı́ndricas 42 en los taladros axiales 40. Las masas adicionales 42 están provistas en su extremo superior de un taladro roscado 44 central en cada una de ellas, en el que se puede introducir a rosca una empuñadura para extraer las masas adicionales. Las masas adicionales 42 se colocan sueltas en los taladros 40 y no se sujetan de forma especial, lo cual es suficiente en el caso de una posición de montaje vertical del vibrador. Los taladros 40 están situados simétricamente respecto a la lı́nea central vertical del cuerpo de masa excéntrica 30, según se ve en la figura 4, a través de cuya lı́nea pasa en perpendicular respecto al plano del dibujo el plano de simetrı́a de la masa del cuerpo de masa excéntrica. Por medio del equipamiento simétrico del cuerpo de masa excéntrica 30 con masas adicionales 42 a ambos lados del plano de simetrı́a, éste permanece invariable en su posición de ángulo en relación con el tronco 18 del árbol. Las masas adicionales 42 no es necesario que se extiendan por toda la longitud de los taladros 40. Si se eligen masas adicionales con la mitad de la longitud, las cuales se posicionan en un lado del plano de simetrı́a de la masa en la parte superior de los taladros 40 y en el otro lado en la parte inferior, se pueden producir con el vibrador también vibraciones oscilantes. Si se utilizan metales pesados para las masas adicionales en el ejemplo de realización, se puede triplicar aproximadamente el par de trabajo del vibrador en comparación con un funcionamiento sin masas adicionales. Si se utiliza hierro del mismo modo para el cuerpo de masa excéntrica, ası́ como también para las masas adicionales, se consigue duplicar aproximadamente el par de trabajo, si todos los taladros 40 están equipados con masas adicionales 42. Por las figuras 2 y 3 puede verse además que en el extremo inferior del vibrador está situado un transductor angular 46 para fijar el ángulo de giro, el cual explora la posición de ángulo del rotor 16 y por lo tanto también del cuerpo de masa excéntrica 30 en el tronco inferior 20 del árbol. En un accionamiento vibratorio con varios vibradores para formar una vibración orientada en un sentido determinado, es necesario sincronizar adecuadamente el ángulo de giro de estos diversos aparatos cuando se encuentran en rotación las masas excéntricas. Esto es posible por medio de motores eléctricos con un mando adecuado, y es ya conocido de forma general por los técnicos. El vibrador de masa centrı́fuga que funciona mediante motor eléctrico, representado en los dibujos, es ideal para su montaje con el eje alineado 5 9 ES 2 132 718 T3 poca altura de construcción y permite realizar una variación deseada de la masa excéntrica en forma cómoda solamente desde el lado superior. verticalmente en las correspondientes máquinas de trabajo, puesto que precisamente en máquinas que exigen una alineación vertical ocupa muy 5 10 15 20 25 30 35 40 45 50 55 60 65 6 10 11 ES 2 132 718 T3 REIVINDICACIONES 1. Vibrador de masa centrı́fuga accionado por motor, con: - una carcasa (2) del motor, con una envoltura (4) de la carcasa, con tapas (6) en los lados de sus extremos, que está provista de medios de sujeción, en especial una brida de sujeción (22) para la sujeción del vibrador en su lugar de colocación; - un cuerpo (16) de rotor del motor, situado en forma rotativa dentro de la carcasa (2) del motor, que en cada uno de sus extremos opuestos entre sı́ está provisto de un tronco (18, 20) del árbol; - cojinetes (8) para los troncos (18, 20) del árbol, situados en las tapas (6) de la carcasa (2) del motor, en las que está apoyado el cuerpo del rotor (16) por medio de los troncos (18, 20) del árbol; y - por lo menos un cuerpo rotativo de masa excéntrica (30) apoyado sobre por lo menos un tronco (18) del árbol, que puede ser unido fijamente a prueba de giro al tronco (18) del árbol fuera de los cojinetes (8); caracterizado porque por lo menos un cuerpo de masa centrı́fuga (30) tiene sobre por lo menos un tronco (18) del árbol una parte (34) situada radialmente en el exterior, que se extiende en sentido axial por encima de la carcasa (2) del motor y puede girar alrededor de ésta, estando el centro de inercia de por lo menos un cuerpo de masa centrı́fuga (30) situado entre los cojinetes (8) del cuerpo de rotor (16). 2. Vibrador según la reivindicación 1, caracterizado porque cada cuerpo de masa excéntrica (30) tiene una parte radial (32) que tiene esencialmente la configuración de una parte o de un sector de un disco circular que incluye la zona central del disco circular, con el fin de sujetar el cuerpo de masa excéntrica sobre el tronco (18) del árbol, y porque esta parte axial (34) que se extiende en sentido axial por encima de la carcasa está configurada como parte de una envoltura cilı́ndrica, que en uno de sus lados está unida a una zona del contorno exterior (36) con forma circular de la parte radial (32). 3. Vibrador según las reivindicaciones 1 ó 2, caracterizado porque por lo menos un cojinete (8) para cada uno de los troncos (18, 20) del árbol está situado en un extremo (6) de la carcasa (2) y por lo menos un cuerpo de masa excéntrica (30) está situado sobre por lo menos un tronco (18) de árbol, sobre una prolongación de este tronco (18) del árbol que se extiende hasta sobrepasar por lo menos un cojinete (8) del tronco (18) del árbol. 4. Vibrador según por lo menos una de las reivindicaciones 1 a 3, caracterizado porque solo sobre uno de los troncos (18) del árbol está situado por lo menos un cuerpo de masa excéntrica (30). 5. Vibrador según por lo menos una de las reivindicaciones 1 a 4, caracterizado porque sobre por lo menos un tronco (18) del árbol está colocado solo un cuerpo de masa excéntrica (30). 5 10 15 20 25 30 35 40 45 12 6. Vibrador según la reivindicación 5, caracterizado porque este cuerpo de masa excéntrica (30) está configurado en forma variable en una masa, en especial en la parte (34) situada radialmente en el exterior y que se extiende en sentido axial por encima de la carcasa (2, 4). 7. Vibrador según la reivindicación 6, caracterizado porque para la variación de la masa del cuerpo de masa excéntrica (30) están previstas masas adicionales (42), que se pueden introducir en sentido axial en escotaduras axiales (40) de la parte axial (34) del cuerpo de masa excéntrica (30) y se pueden fijar en estas escotaduras en caso necesario. 8. Vibrador según la reivindicación 7, caracterizado porque un determinado número de escotaduras axiales (40) para masas adicionales (42) está situado simétricamente respecto a un plano radial de simetrı́a de la masa del cuerpo de masa excéntrica (30). 9. Vibrador según por lo menos una de las reivindicaciones 4 a 8, caracterizado porque por lo menos un cuerpo de masa excéntrica (30) se extiende con su parte axial (34) hasta sobrepasar el centro longitudinal de la carcasa (2, 4) y los medios de sujeción (22) están previstos en la proximidad del otro extremo de la carcasa (2, 4). 10. Vibrador según por lo menos una de las reivindicaciones 4 a 9, para montaje vertical, caracterizado porque por lo menos un cuerpo de masa excéntrica (30) está situado en forma volante sobre una prolongación del tronco superior (18) del árbol y rodea a la carcasa (2, 4) estando orientado hacia abajo, y porque los medios de sujeción (22) en la carcasa (2, 4) están configurados como una brida que rodea al extremo inferior de la carcasa (2, 4) o bien como consolas de apoyo distribuidas por todo el perı́metro en el extremo inferior de la carcasa, con superficie de apoyo orientada hacia abajo. 11. Vibrador según por lo menos una de las reivindicaciones 1 a 10, caracterizado porque el motor es un motor eléctrico. 12. Vibrador según por lo menos una de las reivindicaciones 1 a 11, caracterizado porque un tronco (20) del árbol, en especial un tronco del árbol que no lleva ningún cuerpo de masa excéntrica, está provisto de un transductor angular (46) para fijar el ángulo de giro. 50 55 60 NOTA INFORMATIVA: Conforme a la reserva del art. 167.2 del Convenio de Patentes Europeas (CPE) y a la Disposición Transitoria del RD 2424/1986, de 10 de octubre, relativo a la aplicación del Convenio de Patente Europea, las patentes europeas que designen a España y solicitadas antes del 7-10-1992, no producirán ningún efecto en España en la medida en que confieran protección a productos quı́micos y farmacéuticos como tales. 65 Esta información no prejuzga que la patente esté o no incluı́da en la mencionada reserva. 7 ES 2 132 718 T3 8 ES 2 132 718 T3 9 ES 2 132 718 T3 10