Posición Coord. X Coord. Y Descripción
Anuncio

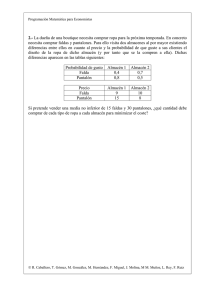
Procedimiento 3 CÉLULA FLEXIBLE Listado de coordenadas del manipulador cartesiano 14-1-2006 Puesto 5 Objetivo Determinar las coordenadas precisas (X,Y) de cada posición de cogida o dejada de pieza para el robot cartesiano. Ámbito de aplicación Si estas posiciones se conservan y aparece un desajuste en la cogida o la dejada, la solución debería pasar por corregir el origen del manipulador. Comentarios Las coordenadas están almacenadas en el DB110 del programa del PLC del puesto 5. Autores: Moisés Pérez Ignacio Latorre Tabla Posición Coord. X P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 P12 P13 P14 P15 P16 P17 P18 P19 134.7 218.7 150.8 286.3 336.3 386.2 436.3 16.5 108.5 108.5 166.5 166.5 284.4 377 470.4 284.4 378.3 470.4 137 Coord. Y Descripción 84.5 332.5 334.85 166 166 166 166 167.5 64.55 107 64.55 107 9.8 9.8 9.8 84.8 84.8 84.5 85.8 Posición de montaje. Caja. Posición de paleta. Caja. Posición de paleta. Eje desmontado. Almacén de ejes. Almacén de ejes. Almacén de ejes. Almacén de ejes. Posición de cogida de bulones. Posición de montaje. Dejada de bulón. Posición de montaje. Dejada de bulón. Posición de montaje. Dejada de bulón. Posición de montaje. Dejada de bulón. Almacén de tapas. Almacén de tapas. Almacén de tapas. Almacén de tapas. Almacén de tapas. Almacén de tapas. Posición de montaje. Eje.