•Las arquitecturas Pipeline (Segmentadas) surgen por la necesidad
Anuncio
 surgen por la necesidad")
!"
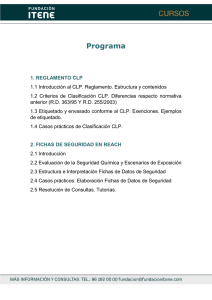
•Las arquitecturas Pipeline (Segmentadas) surgen por
la necesidad de aumentar la velocidad de
procesamiento
•La velocidad, en un sistema secuencial síncrono, está
limitada, entre otros factores, por:
•Tecnológicos
•Consumo
•Restricciones algorítmicas
•Arquitecturales
•Etc
•Segmentar una arquitectura es dividirla en segmentos
o etapas
•Cada segmento (etapa) está definido por un registro
que almacena los datos a procesar y otro que almacena
los resultados
Entrada
Salida
Unidad de Procesamiento no
segmentada
CLK
Salida
Entrada
E1
E2
En
CLK
Arq. Segmentada (n segmentos o etapas)
#%$&$(')$"#+*-,%'$/.!0(132
!"
•CLASIFICACIÓN:
1.- LINEAL: Está formado por un conjunto de etapas
conectadas en cascada, sin bucles de realimentación de
datos
2.- NO LINEAL: Pueden existir bucles hacia delante o
hacia atrás ()HHGEDFNIHHGIRUZDUG)
•Atendiendo a la función que realizan se pueden
clasificar en:
1.- ESTÁTICOS: Realizan una función fija sobre un
conjunto de datos de entrada
2.- DINÁMICOS: Realizan diferentes funciones sobre
un conjunto de datos de entrada
#%$&$(')$"#+*-,%'$/.!0(134
!"
•DEFINICIONES BÁSICAS:
•Partiendo de la arquitectura genérica de un pipeline
estático, como el representado en la figura:
Salida
Entrada
E2
E1
Ek
CLK
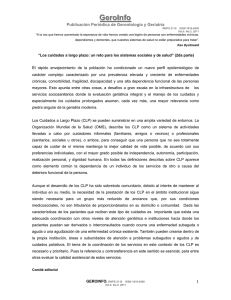
1.- TABLA DE RESERVA de un pipeline lineal
estático de K etapas
t=0
TIEMPO (CICLOS DE CLK)
T1
E1
E2
E3
...
T2
T3 .......................................... Tk
X
X
X
....................................................................
Ek
X
Indican en qué etapa hay datos procesándose, en un
determinado ciclo de reloj
#%$&$(')$"#+*-,%'$/.!0(135
!"
2.- Tal y como se vió, al estudiar el Skew, se ha de
cumplir que:
δ+T≥trmáx+2.ti+τcmáx+tsmáx
Tmin= trmáx +2.ti+τcmáx+tsmáx- δ
•La frecuencia máxima será:
I
máx
=
1
7
PLQ
3.- Se define el THROUGHPUT como el nº de datos
procesados por unidad de tiempo:
TH=f⇒Siempre que se mantenga
un flujo cte de datos de entrada
4.- SPEEDUP(SK):
•En un pipeline lineal estático de K etapas y n datos a
procesar, el nº de ciclos de reloj necesario es:
K+(n-1)
#%$&$(')$"#+*-,%'$/.!0(637
!"
•En una arquitectura no pipeline será:
n.K
•Luego el Speedup (SK), es:
6 :
Q
=
.
..
+ ( Q − 1)
•Si el número de datos, n, es muy grande:
n→∞
SK=SKmáx=K
5.- EFICIENCIA (EK):
(<
=
6<
.
=
Q
.
; →∞
+ (Q −1)
→1
6.- THROUGHPUT (TH):
7>
Q
Q I
= →∞
.
=
=
→ I
[. + (Q −1)].7 . + (Q −1)
#%$&$(')$"#+*-,%'$/.!0(698
!"
•Control de arquitecturas segmentadas
•Se trata de saber cuándo y cómo introducir un dato
nuevo en el pipeline:
•Para obtener un rendimiento máximo
•Y que no existan colisiones, es decir, que no se
introduzca un nuevo dato en una etapa antes de
haber procesado el anterior
•Máximo rendimiento≡Throughput máximo
7L
máx
=
1
º GDWRV ?A@CBDEGFIHJBKF
WLHPSR
•EJEMPLOS:
1.- Pipeline estático lineal que realiza la función A
(con 3 etapas)
t0
E1
E2
E3
t1
t2
t3
t4
A1 A2 A3 A4 A5
A1 A2 A3 A4
A1 A2 A3
..........
tn
...
...
... An-1
t0=t1=t2=.................=tn=T(periodo de reloj)
A1=dato1;A2=dato2......;An-1=daton-1
“llenado” del pipeline=LATENCIA INICIAL
#%$&$(')$"#+*-,%'$/.!0(631
MNOPQ
RSOMQTUQVTNSWQO
MXVTY Z!VZ"O
•El control de este tipo de pipelines es trivial:
•Se introduce un dato en cada ciclo de reloj (sin
colisiones)
•Para procesar A1 (a la salida de E3) transcurren
3 ciclos de reloj: Latencia Inicial
•A partir de ese instante se obtiene un resultado
por cada ciclo de reloj
•Para procesar n datos:
[
.
+ (Q −1)].7 = [3+ Q −1].7 = (Q + 2).7
•SPEEDUP(S3):
6
Q
3
.3.7
=
( Q + 2).7
d → ∞
→ 3 ⇒ 1 º (WDSDV
•Eficiencia (E3):
(
3
=
6
3
3
=
Q
Q
+ 2
e →∞
→ 1
[%\]\(^)\"[+_-`%^\/a!b(c3c
MNOPQ
RSOMQTUQVTNSWQO
MXVTY Z!VZ"O
•THROUGHPUT (TH):
7h
=
Q
Q
.I
+ 2
g →∞
→
I
1
=
7
•Se define la Latencia Media como:
•Nº de unidades de tiempo (T) transcurridas
entre 2 entradas consecutivas
/DWHQFLD
_
0HGLD
=
1
7i
•Se define la utilización media de una etapa o
segmento (en %) como:
7LHPSR
_ GH _ XVR _ GH _ XQD _ HWDSD
7LHPSR _ WRWDO _ GH _ SURFHVDGR ( Q _ GDWRV )
[%\]\(^)\"[+_-`%^\/a!b(cfa
MNOPQ
RSOMQTUQVTNSWQO
MXVTY Z!VZ"O
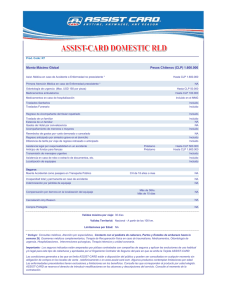
2.- Pipeline estático no lineal que realiza la función B
con 3 etapas
t0
E0
t1
B
t2
t3
t4
t5
t6
B
B
B
E1
t7
B
B
B
E2
B
TABLA DE RESERVA
•Estrategias de Control:
1ª.- “Introducir un nuevo dato en cuanto se pueda”
t0
E1
E2
E3
t1
B1 B1
t2 t3
t4
t5
t6
t7
t8 t9 t10 t11 t12 t13 t14 t15
B2 B2
B1 B1
B2 B2 B3 B3
B1
B1 B2
B2
B3
B3
B1
B1 B2
B2
B3
•Ciclo estable=11.T ciclos de reloj
•Secuencia de latencias <3T,8T,3T,8T,...>
•Ciclo estable (3T,8T)=11.T
[%\]\(^)\"[+_-`%^\/a!b(c3j
MNOPQ
RSOMQTUQVTNSWQO
MXVTY Z!VZ"O
•Latencia media=5’5 (11ciclos de reloj/2 datos
procesados)
•Utilización de etapas:
E1⇒8/11≈73%
E2 ⇒4/11≈36%
E3 ⇒4/11≈36%
•Speedup (S3):
2datosx8ciclosxT
S3=16.T/11.T ≈1’45
•Eficiencia (E3):
E3=S3/3 ≈0’48 ⇒50% máximo
•Throughput (TH):
TH=11 ciclos/2 datos
[%\]\(^)\"[+_-`%^\/a!b(c3k
MNOPQ
RSOMQTUQVTNSWQO
MXVTY Z!VZ"O
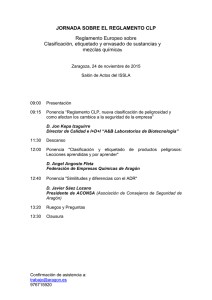
2ª.- “Prueba y Error: Esperamos 4 ciclos de reloj y
analizamos el pipeline”
t0
E1
E2
E3
t1
B1 B1
t2
t3 t4
t5 t6
t7
t8
t9 t10 t11 t12 t13 t14 t15
B2 B2 B1 B1 B3 B3 B2 B2 B4 B4 B3 B3
B1
B1
B2
B2
B3
B3
B4
B1
B1
B2
B2
B3
B3
B4
Ciclo estable ≡ 8.T
•Ritmo de entrada=2 datos/8.T
•Secuencia de latencias <4,4,....>
•Ciclo estable (4T,4T) = 8.T
•Latencia Media = 8 ciclos/2 datos = 4
•Utilización de etapas (en el ciclo estable):
E1⇒100% ⇒¡Es óptimo, no se puede mejorar!
E2 ⇒50%
E3 ⇒50%
•Speedup (S3):
S3=16.T/8.T= 2
•Eficiencia (E3):
E3=S3/3≈0’66.... ⇒ 66’6%
[%\]\(^)\"[+_-`%^\/a!b(c3l
MNOPQ
RSOMQTUQVTNSWQO
MXVTY Z!VZ"O
•Throughput (TH):
TH=1/latencia media=0’25
•Hay que formalizar el método, no vale con “prueba y
error”
•Hay que demostrar que el control es óptimo
•Se puede demostrar que: “LA MÍNIMA LATENCIA
ALCANZABLE (M.A.L.) ES MAYOR O IGUAL
QUE EL MÁXIMO DEL Nº DE VECES QUE SE
UTILIZA UNA ETAPA PARA PROCESAR UN
DATO”
•En el ejemplo anterior, para la función B, de la tabla de
reserva original se ve que:
•E1 se utiliza 4 veces, E2 se utiliza 2 veces y E3 2
veces.
•La M.A.L es 4
•FORMALIZACIÓN DEL MÉTODO
•Se define el vector de colisiones, Vc, como:
Vc(i)=ARRAY (0..H-1) OF BOOLEAN
H⇒Nº de ciclos de reloj para procesar un dato en
la tabla de reserva
1 ⇒Colisión si entra un nuevo dato en i ciclos de reloj
Vc(i) 0 ⇒No habrá colisión
[%\]\(^)\"[+_-`%^\/a!b(c3m
MNOPQ
RSOMQTUQVTNSWQO
MXVTY Z!VZ"O
•Se define el conjunto de latencias prohibidas por
cada segmento o etapa:
CLP(n)n≡Nº de etapas⇒Indica cuando se produce
colisión
•Se define el CLP de todo el pipeline, como:
CLP=UnCLP(n)
•Se obtendrá el vector de colisiones Vc, a partir del
CLP del pipeline:
1⇒Si i está en el CLP
Vc(i)
0 ⇒Si i no está en el CLP
•EJEMPLO:
E0
E1
E2
t0
t1
B
B
t2
t3
B
t4
t5
B
B
t6
t7
B
B
CLP(1)={0,1,2,5,6,7}
CLP(2)={0,2}
B
CLP(3)={0,2}
CLP=U3CLP(i)={0,1,2,5,6,7}
Vc(i)=<1,1,1,0,0,0,1,1,1>
[%\]\(^)\"[+_-`%^\/a!b(c3n
opqrs
tuqosvwsxvpuysq
ozxv{ |!x|"q
•Diagrama de estados de Vc(i)
Vector inicial
11100111
La
ten
cia
≥
8
≥8
c ia
ten
La
=3
a
i
nc
e
t
La
Latencia≥8
La
te n
cia
=
4
11110111
11111111
Latencia=4
*Se obtiene haciendo
*Se obtiene haciendo
el OR lógico:
el OR lógico:
00111000
11100111
11111111
Vc DESPLAZADO
Vc ORIGINAL
01110000
11100111
11110111
•CICLO (3,8) → CICLO “ANSIOSO”
•CICLO (8,8) → CICLO “TONTO”
•CICLO (4,4) → CICLO “ÓPTIMO”
LATENCIA MEDIA = M.A.L.=4
}%~~()~"}+-%~/!K
opqrs
tuqosvwsxvpuysq
ozxv{ |!x|"q
•En ocasiones no es posible alcanzar MAL, o
Throughput máximo
•Una posible solución (a veces no se consigue) es
insertar ciclos de espera.
•EJEMPLO: Pipeline con 3 etapas, Función A.
t0
E1
E2
E3
t1
A
A
A
t2
A
A
CLP(1)={0,2}
CLP(2)={0,1}
CLP(3)={0}
CLP=U3CLP(n)={0,1,2}
Vc(i)=<1,1,1>
•Diagrama de estados de Vc(i):
111
Latencia≥3
•Se sabe que MAL=2, pues es el máximo Nº de veces
que se utiliza E1 y E2 para procesar un dato
}%~~()~"}+-%~/!
opqrs
tuqosvwsxvpuysq
ozxv{ |!x|"q
•Si se introduce un estado de espera D, se obtiene:
t0
t1
t2
A
E1
t3
CLP(1)={0,2}
A
A
A
E2
E3
A
X
CLP(2)={0,2}
CLP(3)={0}
A
D
CLP(4)={0}
•CLP=U4CLP(i)={0,2}
•Vc=<1,0,1,0>
•Diagrama de estados de Vc:
L
cia≥3
n
e
t
a
L
1010
=1
a
i
nc
e
t
a
Lat
enc
ia≥
3
1110
•Latencia media=1+3/2(datos)=2=M.A.L.
t0
E1
E2
E3
D
t1
t2
t3
t4
t5
A1 A2 A1 A2 A3 A4
A1 A2 A1 A2 A3
A3
A1 A2
A1 A2
t6
t7
t8
A3 A4 A5
A4 A3 A4
A4
A3 A4
Ciclo estable (2 datos procesados)
}%~~()~"}+-%~/!K
opqrs
tuqosvwsxvpuysq
ozxv{ |!x|"q
•CONCLUSIONES:
1.- En una arquitectura pipeline, los datos QRVH
SURFHVDQPiVGHSULVD; incluso más despacio (más Hw,
estados de espera, etc)
2.- Se procesan mayor nº de datos por unidad de tiempo
(Throughput)
3.- Una vez alcanzado el ciclo estable (pipelines
estáticos no lineales) el throughput es máximo
4.- En los lineales, una vez “llenado” el pipeline
(latencia inicial), se obtiene un resultado por ciclo de
reloj
5.- Para que 3 y 4 sean ciertos, el flujo de datos de
entrada debe ser continuo y grande
6.- El control de los pipelines lineales es muy simple; el
de los no lineales requiere de autómatas que “decidan”
cuándo y cómo introducir nuevos datos y su ruta por la
arquitectura
}%~~()~"}+-%~/!K