Tema
2
Ejemplos de espacios normados y espacios
de Banach
A continuación vamos a presentar una amplia colección de espacios que nos van a permitir
ilustrar los conceptos y resultados que hemos expuesto hasta ahora, así como los que aparezcan
más adelante. Empezamos presentando unas desigualdades que tendrán un papel clave en todo
lo que sigue:
2.1.
Desigualdades de Young, Hölder y Minkowski
Dado un número real p mayor que 1 (en adelante escribiremos simplemente 1 < p < ∞)
1
1
definimos su exponente conjugado p∗ mediante la igualdad + ∗ = 1 y observamos que tamp p
bién 1 < p∗ < ∞, así como que la relación entre p y p∗ es simétrica: (p∗ )∗ = p.
Pues bien, para cualesquiera a, b ∈ R+ se tiene:
∗
ap bp
+ ∗
ab 6
p
p
(Desigualdad de Young).
La prueba de esta desigualdad es una fácil consecuencia de la convexidad de la función
exponencial real o (equivalentemente) de la concavidad del logaritmo.
De la desigualdad de Young se deduce sin gran dificultad la siguiente:
!1/p
!1/p∗
N
∑ ak bk
k=1
N
6
∑ ak
p
k=1
N
∑ bk p
∗
(Desigualdad de Hölder),
k=1
válida para 1 < p < ∞, cualquier N ∈ N y cualesquiera a1 , a2 , . . . , aN , b1 , b2 , . . . , bN ∈ R+ .
A partir de la desigualdad de Hölder no es difícil deducir:
!1/p
!1/p
!1/p
N
N
∑ (ak + bk ) p
k=1
6
∑ ak p
k=1
N
∑ bk p
+
(Desigualdad de Minkowski),
k=1
igualmente válida para 1 < p < ∞, n ∈ N y a1 , a2 , . . . aN , b1 , b2 , . . . , bN ∈ R+ .
6
2. Ejemplos de espacios normados y espacios de Banach
2.2.
7
Algunos espacios de dimensión finita
Para 1 6 p < ∞ y x = (x(1), x(2), . . . , x(N) ∈ KN , definimos:
N
kxk p =
∑ |x(k)| p
k=1
!1/p
Merece la pena admitir también el valor p = ∞, en cuyo caso escribimos
kxk∞ = máx{|x(k)| : 1 6 k 6 N}.
La notación se justifica por el hecho de que lı́m kxk p = kxk∞ para todo x ∈ KN .
p→∞
Para comprobar que k · k p es una norma (1 6 p 6 ∞), dos de las condiciones a verificar
son evidentes y sólo la desigualdad triangular merece comentario. Tanto para p = 1 como para
p = ∞, dicha desigualdad es inmediata, mientras que, para 1 < p < ∞, es claramente equivalente
a la desigualdad de Minkowski. Observemos que la desigualdad de Hölder toma la forma:
N
∑ |x(k)| |y(k)|
6 kxk p kyk p∗ (1 < p < ∞, x, y ∈ KN )
k=1
y si adoptamos el convenio de que p∗ = ∞ cuando p = 1 y (coherentemente) p∗ = 1 cuando
p = ∞, la desigualdad resulta también cierta para p = 1, ∞.
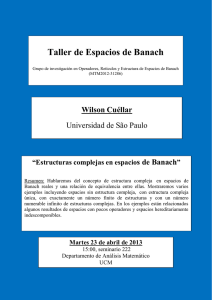
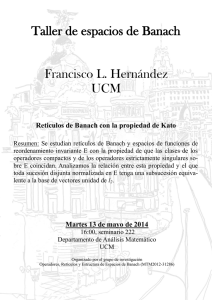
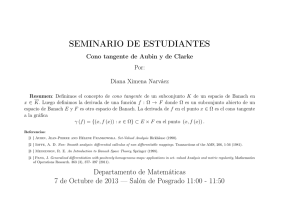
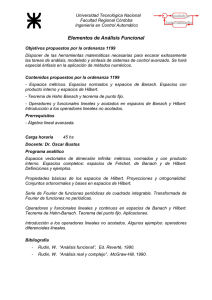
La siguientes figuras muestran la esfera unidad en R2 con la norma k · k p para distintos
valores de p:
p=1
1< p<2
p=2
p>2
p=∞
Todas las normas recién definidas en KN son equivalentes, pues se comprueba fácilmente
que:
kxk∞ 6 kxk p 6 kxk1 6 N kxk∞
(1 6 p 6 ∞, x ∈ KN ),
así que todas generan la topología producto en KN y todas ellas son completas. El espacio de
Banach que obtenemos dotando a KN de la norma k · k p suele denotarse por l Np , notación que se
entenderá mejor cuando presentemos versiones infinito-dimensionales de estos espacios.
2. Ejemplos de espacios normados y espacios de Banach
2.3.
8
Bases y dimensión algebraica
Vamos a recordar algunas nociones elementales de álgebra lineal, expresándolas de forma
que tengan perfecto sentido en cualquier espacio vectorial. Dado un subconjunto no vacío E
de un espacio vectorial X, denotaremos por Lin(E) al subespacio engendrado por E, es decir, la intersección de todos los subespacios de X que contienen a E o, equivalentemente, el
mínimo subespacio de X que contiene a E. Es claro que Lin(E) está formado por todas las
combinaciones lineales (finitas) de elementos de E, es decir,
Lin(E) = {α1 x1 + α2 x2 + αN xN : n ∈ N, α1 , α2 , . . . , αN ∈ K, x1 , x2 , . . . , xN ∈ E}.
Cuando Lin(E) = X decimos que E es un sistema de generadores del espacio vectorial X,
puesto que cada vector de X se puede expresar como combinación lineal de vectores de E. Esta
expresión será única cuando los vectores de E sean linealmente independientes. Dado un subconjunto no vacío F (no necesariamente finito) de nuestro espacio vectorial X, decimos que los
vectores de F son linealmente independientes cuando ninguno de ellos puede obtenerse como
combinación lineal de los restantes, equivalentemente, cuando ninguna combinación lineal no
trivial de vectores de F puede anularse:
α1 , α2 , . . . , αN ∈ K
x1 , x2 , . . . , x N ∈ F
=⇒ α1 = α2 = . . . = αN = 0.
α1 x1 + α2 x2 + αN xN = 0
Un sistema de generadores linealmente independientes del espacio vectorial X es lo que
denominamos base algebraica de X.
Dado un conjunto no vacío arbitrario Λ, podemos considerar el espacio vectorial producto
de todas las aplicaciones de Λ en K, cuyas operaciones son fáciles de adivinar:
KΛ ,
[x + y](λ) = x(λ) + y(λ) ; [αx](λ) = α x(λ) (λ ∈ Λ, x, y ∈ K Λ , α ∈ K).
En este momento nos interesa sobre todo el subespacio vectorial de K Λ formado por las
funciones llamadas casi-nulas, porque se anulan salvo en un conjunto finito, es decir, aplicaciones x ∈ KΛ tales que el conjunto {λ ∈ Λ : x(λ) 6= 0} es finito (conjunto que evidentemente
no será el mismo para diferentes funciones x). Este nuevo espacio vectorial, que puede verse
como una suma directa de tantas copias del cuerpo escalar como indique el cardinal del conjunto Λ, suele denotarse por K(Λ) . Nótese que, si el conjunto Λ es finito, tenemos evidentemente
KΛ = K(Λ) = KN donde N es el número de elementos de Λ, pero cuando Λ es infinito, KΛ es
"mucho más grande" que K(Λ) . Por ejemplo, KN es el espacio de todas las sucesiones de escalares, mientras que en K(N) sólo tenemos las sucesiones casi-nulas, que se anulan a partir de
un cierto término en adelante. Así pues, queda claro que existe gran diferencia entre un producto
infinito y la correspondiente suma directa.
De nuevo para un conjunto no vacío arbitrario Λ, es fácil encontrar una base algebraica del
espacio K(Λ) . En efecto, fijado un λ ∈ Λ, podemos considerar la aplicación eλ ∈ K(Λ) que se
anula en todo el conjunto Λ salvo precisamente en el punto λ, donde toma el valor 1. Es bastante
evidente que el conjunto {eλ : λ ∈ Λ} es una base algebraica de K (Λ) . El siguiente enunciado
clasifica, salvo isomorfismos, todos los espacios vectoriales sobre K y pone de manifiesto que,
2. Ejemplos de espacios normados y espacios de Banach
9
también salvo isomorfismos, no hay más espacios vectoriales sobre K que los de la forma K(Λ) .
Por isomorfismo entre espacios vectoriales entendemos naturalmente una biyección lineal.
Teorema.
(i) Todo espacio vectorial admite una base algebraica. Más concretamente, todo conjunto de
vectores linealmente independientes de un espacio vectorial está contenido en una base
algebraica del espacio.
(ii) Todas las bases algebraicas de un espacio vectorial X tienen el mismo cardinal, que
recibe el nombre de dimensión algebraica de X.
(iii) Dos espacios vectoriales sobre el mismo cuerpo K son isomorfos si, y sólo si, tienen la
misma dimensión algebraica.
Aunque no vamos a exponer la demostración de este teorema, conviene resaltar que la
primera afirmación requiere usar de manera esencial el Lema de Zorn. En la práctica esto significa que, aunque conozcamos la dimensión algebraica de un espacio vectorial, rara vez vamos
a disponer explícitamente de una base algebraica del espacio, salvo que la dimensión algebraica
sea finita o, al menos, numerable. Para la segunda afirmación del teorema se usan resultados no
triviales de la teoría de cardinales y la tercera es prácticamente evidente.
Puede merecer la pena recapitular toda la discusión anterior. A cada conjunto no vacío
Λ, hemos asociado un espacio vectorial K(Λ) , que admite como base algebraica el conjunto
{eλ : λ ∈ Λ}, luego la dimensión algebraica de K(Λ) es el cardinal del conjunto Λ. Recíprocamente, dado un espacio vectorial X, podemos encontrar en X una base algebraica, que tendrá la
forma {xλ : λ ∈ Λ} para algún conjunto no vacío Λ, con lo que X resulta ser isomorfo a K(Λ) .
Finalmente los espacios K(Λ) y K(Γ) son isomorfos si, y sólo si, los conjuntos Λ y Γ tienen el
mismo cardinal, es decir, existe una biyección de uno sobre otro. Conviene hacer una precisión,
pues la discusión anterior excluye al espacio vectorial trivial X = {0}; para incluirlo basta asignarle dimensión 0. Por otra parte, conviene saber que toda la discusión es válida para espacios
vectoriales sobre un cuerpo conmutativo arbitrario, aunque aquí sólo nos interesen los espacios
vectoriales reales o complejos.
2.4.
Espacios de sucesiones
Tengamos presente la definición del espacio vectorial producto KN (todas las sucesiones de
escalares) y de la suma directa K(N) (sucesiones casi-nulas). En este apartado vamos a considerar una amplia gama de subespacios de KN que contienen a K(N) y que, dotados de la norma
apropiada en cada caso, se convertirán en importantes ejemplos de espacios de Banach.
2. Ejemplos de espacios normados y espacios de Banach
10
2.4.1. Los espacios l p (1 6 p < ∞)
Fijado 1 6 p < ∞, denotaremos por l p al conjunto de las sucesiones x ∈ KN tales que la serie
∑ |x(n)| p es convergente, abreviadamente:
n>1
l p = x ∈ KN :
∞
∑ |x(n)| p < ∞
(1 6 p < ∞).
k=1
Por ejemplo, l1 está formado por los términos generales de las series de escalares absolutamente
convergentes.
Pasando al límite cuando N → ∞ en la desigualdad de Minkowski, obtenemos que:
∞
∑ (ak + bk ) p
k=1
!1/p
∞
6
∑ ak p
k=1
!1/p
∞
+
∑ bk p
k=1
!1/p
,
para cualesquiera sucesiones {ak } y {bk } de números reales positivos y 1 6 p < ∞. A partir de
esta desigualdad de Minkowski para series, es fácil deducir que l p es un subespacio vectorial
de KN y que definiendo
!1/p
∞
kxk p =
∑ |x(n)| p
(x ∈ l p ),
k=1
se obtiene una norma en l p . Para comprobar su complitud, sea {xn } una sucesión de Cauchy
en l p . Fijado k ∈ N, tenemos claramente que |xn (k) − xm (k)| 6 kxn − xm k, para cualesquiera
n, m ∈ N, así que {xn (k)} es una sucesión de Cauchy en K, luego convergente; definiendo, para
cada k ∈ N, x(k) = lı́m xn (k) obtenemos una sucesión x ∈ KN . No es difícil comprobar que
n→∞
x ∈ l p y que {kxn − xk p } → 0, es decir, {xn } converge a x en l p . Habremos comprobado así que
l p es un espacio de Banach.
Podemos analizar brevemente la relación entre los espacios l p para distintos valores de p.
Si tomamos 1 6 p < q < ∞ y fijamos una sucesión x ∈ l p , como quiera que lı́m x(n) = 0,
n→∞
tendremos |x(n)|q 6 |x(n)| p para n suficientemente grande, con lo que el criterio de comparación
para series de términos positivos nos dice que x ∈ lq . La implicación contraria no es cierta:
la sucesión {n1/p } está en lq pero no en l p . En resumidas cuentas, el espacio l p se agranda
estrictamente al aumentar p.
2.4.2. Los vectores unidad en l p
Observemos que, para cualquier p, siempre con 1 6 p < ∞, el espacio vectorial K(N) está
contenido estrictamente en l p , aunque evidentemente, la norma que K(N) hereda de l p es distinta para distintos valores de p. De hecho, vamos a darnos cuenta de que K(N) es un subespacio
denso de l p . En efecto, recordemos la base algebraica de K(N) definida anteriormente, concretamente {en : n ∈ N} donde, para cada n ∈ N, en es la sucesión cuyo n-ésimo término es 1 y los
demás son 0. Viendo a en como elemento de l p , decimos que en es el n-ésimo vector unidad
2. Ejemplos de espacios normados y espacios de Banach
de l p . Dado un x ∈ l p podemos considerar la serie
11
∑ x(n) en, una serie de vectores de l p cuyas
n>1
sumas parciales pertenecen evidentemente al subespacio K(N) . Fijado cualquier número natural
N, tenemos claramente:
∞
N
x − ∑ x(k) ek p = ∑ |x(n)| p ,
k=1
k=N+1
y usando que el resto de una serie convergente ha de tender a cero, deducimos que la serie
considerada converge a x en l p . En resumen:
∞
x=
∑ x(n) en
(x ∈ l p , 1 6 p < ∞).
n=1
Queda así de manifiesto que K(N) es denso en l p . Dicho de manera equivalente, si consideramos en K(N) la norma que hereda de l p , tenemos un ejemplo de espacio normado no completo,
cuya completación es precisamente l p . No debe extrañarnos que un mismo espacio vectorial dé
lugar a completaciones diferentes dependiendo de la norma con que lo dotemos. Abundando
en la misma idea, tomemos 1 6 p < q < ∞ y veamos a l p como un subespacio vectorial de lq ;
entonces en l p , además de la norma propia k · k p , que le convierte como sabemos en un espacio de Banach, disponemos de la norma que hereda de lq , que podemos seguir llamando k · kq .
Con esta segunda, l p es un subespacio propio denso en lq , ya que contiene al subespacio denso
K(N) ; por tanto, es también un espacio normado no completo cuya completación vuelve a ser
lq . Deducimos que en l p las normas k · k p y k · kq no son equivalentes, puesto que la primera es
completa y la segunda no lo es.
Volviendo al desarrollo en serie obtenido anteriormente, con muy poco esfuerzo adicional se
puede comprobar que, siempre para 1 6 p < ∞ y cualquier x ∈ l p , la serie ∑ x(n) en converge
n>1
incondicionalmente. Por otra parte, es claro que kx(n) en k p = |x(n)| para todo n ∈ N, luego
dicha serie convergerá absolutamente si, y sólo si x ∈ l1 . Por tanto, tomando 1 < p < ∞ y una
sucesión x ∈ l p tal que x ∈
/ l1 , deducimos que la serie ∑ x(n) en converge incondicionalmente
n>1
en l p pero no converge absolutamente. Por ejemplo, para 1 < p < ∞, la serie
en
converge
n>1 n
∑
incondicionalmente en l p pero no converge absolutamente.
2.4.3. Bases de Schauder
Observemos la sucesión {en } en cualquiera de los espacios l p con 1 6 p < ∞. Se trata
evidentemente de una sucesión de vectores linealmente independientes, pero no forman una
base algebraica de l p , el subespacio engendrado es como sabemos K(N) , que es denso en l p pero
no es el total. Sin embargo, cada vector x ∈ l p se expresa como una especie de combinación
∞
lineal infinita de los términos de nuestra sucesión, más concretamente, x =
∑ x(n)en, serie que
n=1
converge (incluso incondicionalmente) en la topología de la norma del espacio l p . Además,
no es difícil convencerse de que dicha expresión es única, es decir, si para una sucesión de
2. Ejemplos de espacios normados y espacios de Banach
12
∞
escalares {αn } tuviésemos también x =
∑ αn en, se tendría obligadamente αn = x(n) para todo
n=1
n ∈ N. Podríamos decir que la sucesión {en : n ∈ N} se comporta como una especie de base
de l p , siempre que no nos limitemos a hacer combinaciones lineales finitas sino que admitamos
sumas de series del tipo que venimos manejando. Ello motiva la siguiente definición.
Se dice que una sucesión {un } en un espacio de Banach X es una base de Schauder de
X cuando cada vector x ∈ X se expresa, de manera única, como suma de una serie de la forma
x = ∑∞
n=1 λn un , para conveniente sucesión {λn } de escalares. Así pues, nuestras consideraciones
anteriores se resumen diciendo que {en } es una base de Schauder de l p para 1 6 p < ∞. Se dice
que {en } es la base de vectores unidad de l p . El concepto de base de Schauder es muy útil en
el estudio de los espacios de Banach.
2.4.4. Espacios normados separables
Notemos que los vectores de una base de Schauder {un }, en cualquier espacio de Banach X,
siempre son linealmente independientes. El subespacio engendrado, Y = Lin({un : n ∈ N}) tiene
dimensión infinito-numerable, luego como espacio vectorial es isomorfo a K(N) ; claramente Y
es denso en X y se comprueba sin mucha dificultad que no puede coincidir con X. Así pues,
todo espacio de Banach que admita una base de Schauder contiene un subespacio denso de
dimensión numerable. Deducimos que X, como espacio topológico, es separable, es decir,
existe un conjunto numerable denso en X. En efecto, como K es separable, disponemos de un
conjunto numerable ∆ denso en K (si K = R podemos tomar ∆ = Q y, si K = C, entonces
∆ = Q + iQ). Formamos ahora combinaciones lineales de los términos de la sucesión {un } con
coeficientes en ∆, es decir, consideramos el conjunto:
E = {δ1 u1 + δ2 u2 + . . . + δn un : n ∈ N, δ1 , δ2 , . . . , δn ∈ ∆}.
Es fácil ver que E es un subconjunto numerable de Y ; además, usando que ∆ es denso en K, se
comprueba también sin dificultad que toda combinación lineal de términos de la sucesión {un }
se aproxima por elementos de E, esto es, que Y está contenido en el cierre de E. Puesto que Y era
denso en X, deducimos que también E es denso en X y tenemos el conjunto numerable denso en
X que buscábamos. Obsérvese que en el último razonamiento no hemos usado la complitud del
espacio X, sino solamente el hecho de que Y tiene dimensión numerable y es denso en X. Así
pues, cualquier espacio normado que contenga un subespacio denso de dimensión numerable
es separable. Resaltemos que los espacios l p con 1 6 p < ∞ son espacios de Banach separables.
Durante algún tiempo, en todos los espacios de Banach separables conocidos se disponía
de una base de Schauder. Ello motivó a S. Banach a preguntar en 1932 si en todo espacio de
Banach separable se puede encontrar una base de Schauder. El problema fue resuelto en 1973
por el matemático sueco Per Enflo, construyendo una gama de espacios de Banach separables
sin base de Schauder.
2. Ejemplos de espacios normados y espacios de Banach
13
2.4.5. Espacios de sucesiones acotadas
En la discusión anterior hemos excluido siempre el caso p = ∞, que ahora vamos a estudiar.
Recordemos que l∞N denotaba el espacio de Banach que se obtiene dotando a KN de la norma
del máximo k · k∞ . Está claro cómo podemos extender esta norma haciendo que tenga sentido
para una sucesión de escalares: la sucesión deberá estar acotada y, como pudiera no tener un
término con módulo máximo, usamos el supremo. Denotaremos por l∞ el subespacio de KN
formado por todas las sucesiones acotadas de escalares, abreviadamente:
l∞ = x ∈ KN : sup{|x(n)| : n ∈ N} < ∞ .
Se comprueba sin dificultad que l∞ , con la norma definida por
kxk∞ = sup{|x(n)| : n ∈ N}
(x ∈ l∞ )
es un espacio de Banach.
Hacemos aquí un inciso para comentar que, al igual que la desigualdad de Minkowski,
también la desigualdad de Hölder tiene su versión para series. Concretamente, tomando x ∈ l p
1
1
e y ∈ l p∗ con 1 6 p 6 ∞, + ∗ = 1 y los convenios ya adoptados de que p∗ = ∞ cuando p = 1
p p
y p∗ = 1 cuando p = ∞, tenemos:
∞
∑ |x(n)| |y(n)|
6 kxk p kyk p∗ .
n=1
Subespacios destacados de l∞ son el espacio c0 de las sucesiones convergentes a cero y
el espacio c de las sucesiones convergentes. Es fácil comprobar que ambos son subespacios
cerrados de l∞ y por tanto espacios de Banach con la norma k · k∞ que ambos heredan de l∞ .
Observemos también que c se obtiene añadiendo una recta a c0 o, con más precisión, c0 es un
hiperplano en c. Concretamente, si denotamos por u a la sucesión constantemente igual a 1, es
claro que c = c0 ⊕ Ku.
Prestemos atención a los vectores unidad {en : n ∈ N} que obviamente están todos ellos en
c0 . El subespacio que engendran (que como espacio vectorial sigue obviamente siendo K(N) ),
visto ahora como subespacio de c0 , suele denotarse por c00 . Pues bien, otra vez c00 es denso en
c0 ; más aún, {en } es una base de Schauder de c0 , ya que es fácil comprobar que
∞
x=
∑ x(n) en
(x ∈ c0 ),
n=1
la serie converge incondicionalmente (pero no siempre absolutamente) y se tiene también la unicidad del desarrollo. En particular, c0 vuelve a ser un espacio de Banach separable. No es difícil
comprobar que, añadiendo a {en } la sucesión u constantemente igual a 1, o más rigurosamente,
tomando e0 = u, se obtiene una base de Schauder {en : n > 0} del espacio c de las sucesiones
convergentes, espacio que también resulta ser separable.
Por el contrario l∞ no es separable. Para comprobarlo, como casi siempre que se quiere
probar que un espacio métrico no es separable, bastará encontrar un subconjunto no numerable
2. Ejemplos de espacios normados y espacios de Banach
14
A ⊂ l∞ tal que, para algún δ > 0, se tenga ka − bk > δ cualesquiera sean a, b ∈ A con a 6= b. Pues
bien, sea P(N) el conjunto de todas las partes de N que, como bien sabemos, no es numerable;
para cada E ∈ P(N) sea xE la función característica de E, es decir, xE (n) = 1 cuando n ∈ E y
xE (n) = 0 cuando n ∈
/ E. Es claro que si E, F ∈ P(N) y E 6= F, entonces kxE − xF k∞ = 1, con
lo que tomando A = {xE : E ∈ P(N)} obtenemos un subconjunto no numerable de l∞ tal que
cualesquiera dos elementos distintos de A están a distancia 1. Intuitivamente l∞ es mucho más
grande que c0 o que c, no posee ningún subespacio denso de dimensión numerable.
Tal vez merezca la pena observar las relaciones de inclusión entre todos los espacios de
sucesiones que han aparecido hasta aquí. Para 1 < p < q < ∞, como espacios vectoriales (prescindiendo de normas) tenemos:
c00 ⊂ l1 ⊂ l p ⊂ lq ⊂ c0 ⊂ c ⊂ l∞ ,
1
inclusiones todas estrictas. La sucesión
está en c0 pero no está en ningún l p con
log(n + 1)
p < ∞.
2.5.
Espacios de familias sumables
Para presentar otra amplia gama de espacios de Banach, que incluirá las estudiadas hasta
ahora y proporcionará nuevos ejemplos de espacios de Banach no separables, conviene precisar
el siguiente concepto.
2.5.1. Familias sumables de números positivos
Sea {aλ : λ ∈ Λ} una familia de números, con aλ ∈ R y aλ > 0 para todo λ ∈ Λ. Consideremos todas las posibles sumas (finitas) de elementos de la familia; más concretamente,
denotando por F(Λ) el conjunto de todas las partes finitas de Λ, formamos el conjunto
S = { ∑ aλ : F ∈ F(Λ)}.
λ∈F
Cuando S está acotado decimos que {aλ : λ ∈ Λ} es sumable y definimos su suma por:
∑ aλ = sup S,
λ∈Λ
es decir, el supremo de todas las posibles sumas finitas de elementos de la familia. También es
costumbre escribir ∑ aλ < ∞ para indicar que la familia {aλ : λ ∈ Λ} es sumable. Veamos los
λ∈Λ
tres casos que pueden darse:
Cuando Λ es finito, digamos Λ = {1, 2, . . . , N}, no hemos inventado nada nuevo, cualquier
familia {aλ : λ ∈ Λ} va a ser sumable y, obviamente,
suma finita.
N
∑ aλ = ∑ ak no es más que una
λ∈Λ
k=1
2. Ejemplos de espacios normados y espacios de Banach
15
Cuando Λ es infinito-numerable, usando cualquier biyección σ de N sobre Λ, es fácil
comprobar que la familia {aλ : λ ∈ Λ} es sumable si, y sólo si, la serie ∑ aσ(n) es conn>1
∞
vergente, en cuyo caso,
∑ aλ = ∑ aσ(n). Tampoco en este caso parece que hayamos
λ∈Λ
n=1
inventado nada nuevo. Sin embargo, cabe pensar que podemos tener Λ = Z (o aún peor,
Λ = Q) y no necesitamos especificar ninguna biyección concreta de N sobre Λ, que nos
permita formar la correspondiente serie, para definir de manera coherente la suma de la
familia.
Supongamos finalmente que el conjunto Λ no es numerable. Aparentemente hemos podido definir la suma de una familia no numerable, afirmación que debe
ser matizada. Si
1
α = ∑ aλ < ∞, para cada k ∈ N podemos considerar el conjunto Λk = λ ∈ Λ : aλ >
,
k
λ∈Λ
que ha de ser finito, más concretamente su número de elementos no puede exceder de kα,
pues de lo contrario tendríamos sumas finitas de elementos de la familia mayores que α,
cosa que no puede ocurrir. Si ahora consideramos el conjunto Λ0 = ∪∞
k=1 Λk , es claro que
Λ0 es numerable, así como que aλ = 0 a menos que λ ∈ Λ0 . Por tanto, hemos definido la
suma de una familia no numerable de números, pero la familia sólo será sumable cuando
todos ellos sean cero salvo un conjunto numerable, con lo que recaemos claramente en el
caso anterior (Λ numerable). Pensemos, sin embargo lo que ocurre cuando consideramos
muchas familias sumables simultáneamente. Supongamos
o cada i en un ciern que, para
(i)
to conjunto de índices I tenemos una familia sumable aλ : λ ∈ Λ ; ciertamente, para
o
n
(i)
cada i ∈ I, el conjunto λ ∈ Λ : aλ 6= 0 es numerable, pero dicho conjunto depende
obviamente de i, pudiendo ocurrir (si I no es numerable) que no podamos encontrar un
(i)
subconjunto numerable fijo Λ0 tal que aλ = 0 para todo λ ∈ Λ\Λ0 y todo i ∈ I. Enseguida
veremos abundantes ejemplos de esta situación.
2.5.2. Los Espacios l Λ
p (1 6 p < ∞)
Fijemos pues nuestro conjunto no vacío, pero por lo demás arbitrario, Λ; sea 1 6 p < ∞ y
consideremos el subconjunto del espacio vectorial producto KΛ dado por:
p
Λ
|x(λ)|
<
∞
.
lΛ
=
x
∈
K
:
∑
p
λ∈Λ
Λ
Es fácil ver, usando la desigualdad de Minkowski, que l Λ
p es un subespacio vectorial de K y
que definiendo:
!1/p
kxk p =
∑ |x(λ)| p
λ∈Λ
(x ∈ l Λ
p ),
se obtiene una norma en l Λ
p que lo convierte en un espacio de Banach. Los comentarios previos
sobre familias sumables nos permiten ahora considerar los siguientes casos particulares:
2. Ejemplos de espacios normados y espacios de Banach
16
Si Λ es finito con N elementos, el espacio l Λ
p no es otra cosa que el espacio de dimensión
N
N que habíamos denotado l p .
Si Λ es infinito numerable l Λ
p se identifica totalmente (mediante una biyección lineal que
conserva la norma) con l p . Sin embargo, formalmente puede ser útil, como se verá más
adelante, considerar por ejemplo el espacio l Zp .
Si Λ no es numerable l Λ
p es, como veremos, un espacio de Banach no separable.
Así pues, aparte de englobar ejemplos anteriores, aparecen nuevos ejemplos de espacios de Banach cuando Λ no es numerable. Muchas de las afirmaciones hechas para espacios de sucesiones
(Λ)
tienen sus análogas en este caso. Por ejemplo, l Λ
p se agranda estrictamente al aumentar p y K
es un subespacio denso de l Λ
p para 1 6 p < ∞. Si consideramos nuevamente los vectores unidad
{eλ : λ ∈ Λ}, observamos que la distancia entre cualesquiera dos de ellos (distintos) es 21/p , de
Λ
ahí la afirmación de que l Λ
p no es separable. Al igual que en el caso Λ = N, cada vector x ∈ l p
tiene un único desarrollo en la forma x = ∑ x(λ)eλ , pero este hecho requiere el concepto de
λ∈Λ
familia sumable de vectores en un espacio normado, que trataremos más adelante.
2.6.
Espacios de funciones continuas
En el apartado anterior hemos excluido intencionadamente el caso p = ∞ para el que la
noción de familia sumable no se precisa; consideremos ahora este caso.
Dado nuevamente un conjunto no vacío Λ, denotaremos naturalmente por l∞Λ al espacio
vectorial de todas las funciones acotadas de Λ en K:
l∞Λ = x ∈ KΛ : sup{|x(λ)| : λ ∈ Λ} < ∞ ,
dotado de la norma:
kxk∞ = sup {|x(λ)| : λ ∈ Λ}
x ∈ ℓΛ
∞ .
Es fácil comprobar que la convergencia en esta norma equivale a la convergencia uniforme
en Λ, lo que nos lleva a probar sin dificultad que ℓΛ
∞ es un espacio de Banach. Como casos
particulares ya conocidos tenemos obviamente l∞ (cuando Λ = N) y l∞N (cuando Λ es finito con N
elementos). Nos interesan ahora determinados subespacios de l∞Λ que aparecen de forma natural
cuando Λ está provisto de una topología que asegure la abundancia de funciones continuas de
Λ en K.
Si L es un espacio topológico localmente compacto y de Hausdorff, C00 (L) es por definición el subespacio de ℓL∞ formado por las funciones continuas de soporte compacto, esto es
funciones continuas f : L → K tales que el conjunto
sop( f ) = {t ∈ L : f (t) 6= 0},
llamado soporte de la función f , es compacto. Es claro que una tal función está acotada y, de
hecho su valor absoluto (o módulo) alcanza un valor máximo en algún punto de L:
k f k∞ = máx{| f (t)| : t ∈ L}
( f ∈ C00 (L)) .
2. Ejemplos de espacios normados y espacios de Banach
17
El cambio de notación no habrá pasado desapercibido: hasta el apartado anterior, trabajábamos con funciones definidas en un conjunto Λ en el que no se tenía en cuenta, aunque la
hubiera, ninguna estructura adicional, es decir, Λ sólo hacía el papel de conjunto de índices;
era lógico, por tanto, pensar en las funciones de Λ en K como simples familias de números
con subíndices en Λ y usar una notación típica de vectores x, y . . . Los espacios normados que
han ido apareciendo se denotaban con letras minúsculas. Sin embargo, ahora hemos empezado
a considerar funciones que tienen alguna propiedad (continua, soporte compacto) relacionada
con una estructura del conjunto L donde están definidas (una topología); para resaltar este hecho, empezamos a usar una notación típica de funciones ( f , g . . .) y el espacio normado que
consideramos se denota con letra mayúscula.
En general, C00 (L) puede no ser un subespacio cerrado de l∞L (es lo que ocurre, por ejemplo,
cuando L = R). En cualquier caso, el cierre de C00 (L) en l∞L es el espacio de Banach C0 (L)
de las funciones continuas que se anulan en el infinito. Decimos que una función continua
f : L −→ K se anula en el infinito si, para cada ε > 0, el conjunto {t ∈ L : | f (t)| > ε} es compacto. Si recordamos la compactación por un punto L̂ = L ∪ {∞}, nuestra terminología resulta
coherente, ya que una función continua f : L → K pertenece a C0 (L) si, y sólo si lı́m f (t) = 0,
t→∞
equivalentemente, f se puede extender a una función continua en L̂ definiendo f (∞) = 0.
Es evidente que si una función continua f : L → K tiene soporte compacto, entonces f se
anula en el infinito, ya que para todo ε > 0, el conjunto {t ∈ L : | f (t)| > ε} es cerrado y está
contenido en el soporte de f . El hecho de que C00 (L) es denso en C0 (L) se deduce fácilmente
del Lema de Urysohn.
En particular, tomando L = N con la topología discreta, cuyos únicos subconjuntos compactos son los finitos, reaparecen el espacio c00 de las sucesiones casi-nulas y el espacio c0 de
las sucesiones convergentes a cero. En general, si Λ es un conjunto arbitrario con la topología
discreta, entonces C00 (Λ) coincide con K(Λ) mientras que C0 (Λ) está formado por las funciones
f ∈ KΛ tales que el conjunto {λ ∈ Λ : | f (t)| > ε} es finito para todo ε > 0.
El caso más interesante se presenta cuando tenemos de hecho un espacio topológico compacto de Hausdorff K. Es claro que entonces C00 (K) = C0 (K) es el espacio de Banach de todas
las funciones continuas en K con valores escalares, al que denotamos simplemente por C(K),
dotado por supuesto con la norma del máximo. Si de nuevo tomamos en N la topología discreta
y K es la compactación por un punto de N, entonces C(K) no es otra cosa que el espacio c de
las sucesiones convergentes. Pero es claro que aquí tenemos una amplísima gama de espacios
de Banach, entre los que cabe destacar, por ejemplo a C[0,1].
2.7.
Espacios de funciones integrables
Sea Ω un subconjunto medible de RN con medida (de Lebesgue) positiva. Para N = 1 los
casos más frecuentes son Ω = [0, 1] (o cualquier intervalo compacto), Ω = R+ y Ω = R; para
N > 1, es frecuente tomar como Ω cualquier subconjunto compacto (con medida positiva) o
cualquier subconjunto abierto (no vacío) de RN . Trabajaremos con funciones medibles de Ω en
K identificando dos funciones que coincidan casi por doquier (c.p.d.), esto es, que coincidan
salvo en un conjunto de medida nula. Denotaremos por L(Ω) al espacio vectorial formado por
2. Ejemplos de espacios normados y espacios de Banach
18
tales funciones. Rigurosamente hablando, los elementos de este espacio son clases de equivalencia, pero es mucho menos engorroso y más intuitivo pensar que los elementos de L(Ω) son
funciones, con las debidas precauciones.
2.7.1. Desigualdades integrales de Hölder y Minkowski
A partir de la desigualdad de Young, obtenemos fácilmente que si f , g ∈ L(Ω), 1 < p < ∞
1
1
y, como siempre, + ∗ = 1, entonces:
p p
Z
1/p Z
1/p∗
Z
p
p∗
| f (t)g(t)|dt 6
| f (t)| dt
|g(t)| dt
Ω
Ω
Ω
A partir de esta desigualdad integral de Hölder, obtenemos fácilmente la correspondiente desigualdad integral de Minkowski:
Z
1/p
1/p
1/p
Z
Z
p
p
p
| f (t) + g(t)| dt
| f (t)| dt
|g(t)| dt
6
+
,
Ω
Ω
Ω
válida también para cualesquiera f , g ∈ L(Ω) y 1 < p < ∞. Nuevamente la desigualdad de
Minkowski es evidente para p = 1.
2.7.2. Los espacios L p (Ω)
Todo está ya preparado para una nueva e importante gama de espacios de Banach. Fijado,
una vez más, 1 6 p < ∞, definimos:
L p (Ω) = f ∈ L(Ω) :
Z
Ω
| f (t)| p dt < ∞ .
La desigualdad de Minkowski nos asegura claramente que L p (Ω) es un subespacio vectorial de
L(Ω) y que, definiendo
Z
1/p
p
k f kp =
( f ∈ L p (Ω)),
| f (t)| dt
Ω
se obtiene una norma en L p (Ω). Conviene resaltar que la identificación de funciones que coinciden c.p.d. es esencial para poder deducir de k f k p = 0 que f = 0. La complitud de L p (Ω) es
un importante teorema en teoría de la integración. Al menos en el caso Ω = RN , este teorema
debe ser conocido y la demostración es casi literalmente la misma en cualquier otro caso:
Teorema de Riesz-Fisher. Para cualquier conjunto medible Ω ⊆ RN de medida positiva y
1 6 p < ∞, L p (Ω) es un espacio de Banach.
Comparemos de nuevo los espacios L p (Ω) para distintos valores de p. La situación es muy
distinta (en algún caso la opuesta) de la que teníamos para los espacios de sucesiones o de
familias sumables. Concretamente, dados 1 6 p < q < ∞, no es demasiado difícil comprobar
las siguientes afirmaciones:
2. Ejemplos de espacios normados y espacios de Banach
19
Si Ω tiene medida finita (por ejemplo, si Ω está acotado), entonces Lq (Ω) está estrictamente contenido en L p (Ω).
Si Ω tiene medida infinita (por ejemplo Ω = RN ), los conjuntos L p (Ω) y Lq (Ω) no son
comparables, es posible encontrar funciones de cualquiera de ellos que no están en el
otro.
Concretando al caso en que Ω es un abierto de RN , conviene observar que el espacio vectorial C00 (Ω), de las funciones continuas de soporte compacto, está contenido
de forma natural
Z
en L p (Ω). En efecto: por una parte, es claro que si f ∈ C00 (Ω), entonces
Ω
| f (t)| p dt < ∞; por
otra, hay que pensar que un conjunto de medida nula tiene forzosamente interior vacío y, por
tanto, dos funciones continuas en Ω que coincidan casi por doquier, han de ser idénticas. Pues
bien, otro importante teorema en teoría de la integración asegura que C00 (Ω) es denso en L p (Ω)
para 1 6 p < ∞. De hecho, con cierto esfuerzo adicional, se puede demostrar que toda función
de L p (Ω) se puede obtener como límite en dicho espacio de una sucesión de funciones de clase
C∞ con soporte compacto contenido en Ω. Así pues, siempre para 1 6 p < ∞ y cualquier abierto
Ω ⊆ RN , la situación de C00 (Ω) en L p (Ω) es enteramente análoga a la que tenía c00 dentro de
l p . Para destacar otro caso importante, cuando Ω = [0, 1], también es cierto que C[0, 1] es un
subespacio denso de L p [0, 1] para 1 6 p < ∞.
2.8.
Funciones esencialmente acotadas
Sea como antes Ω un subconjunto medible de RN con medida positiva. Decimos que una
función f : Ω → K está esencialmente acotada cuando existe una constante M > 0 tal que
| f (t)| 6 M para casi todo t ∈ Ω, equivalentemente | f | 6 M c.p.d. Denotamos por L∞ (Ω) al
espacio vectorial formado por todas las funciones medibles y esencialmente acotadas de Ω en
K, en el que seguimos identificando funciones que coincidan c.p.d. Definimos en dicho espacio:
k f k∞ = ess sup | f | = mı́n{M > 0 : | f | 6 M, c.p.d.} ( f ∈ L∞ (Ω)).
Es fácil comprobar que el conjunto de constantes que aparece en el último miembro de la
igualdad anterior (los mayorantes esenciales de | f |) tiene efectivamente un mínimo, al que
es lógico llamar supremo esencial de | f |. Seguidamente, también resulta fácil comprobar que
mediante este supremo esencial se consigue efectivamente una norma en L∞ (Ω). Una sucesión
{ fn } converge en L∞ (Ω) si y sólo si, converge uniformemente c.p.d. en Ω, cosa que requiere
una explicación: lo que se quiere decir es que, eligiendo para cada n ∈ N cualquier función ϕn
que represente a la clase de equivalencia fn , existe un conjunto de medida nula E ⊂ Ω tal que
la sucesión {ϕn } converge uniformemente en Ω \ E. A partir de aquí se puede deducir ya sin
dificultad que L∞ (Ω) es un espacio de Banach.
Conviene comentar la diferencia entre los espacios L∞ (Ω) y l∞Ω . Nótese que si f ∈ L∞ (Ω)
podemos modificar f en un conjunto de medida nula, obteniendo otra función fˆ, que hemos
identificado con f , y para la cual la desigualdad | fˆ| 6 k f k∞ es válida en todo punto de Ω y no
sólo c.p.d., con lo cual fˆ ∈ l∞Ω e incluso sup | fˆ| = ess sup | f |. Dicho de otra forma, cada clase de
equivalencia en L∞ (Ω) tiene un representante en l∞Ω con la misma norma. Esto no nos debe llevar
2. Ejemplos de espacios normados y espacios de Banach
20
a confundir ambos espacios: para empezar, en l∞Ω hay funciones que no son medibles; peor aún,
una función no nula f ∈ l∞Ω podría anularse c.p.d. y cuando la vemos en L∞ (Ω) se hace cero;
en cualquier caso, para f ∈ l∞Ω el supremo esencial de | f | puede ser mucho más pequeño que el
supremo usual.
Comparamos ahora L∞ (Ω) con L p (Ω) para 1 6 p < ∞. Es fácil comprobar:
Si Ω tiene medida finita, entonces L∞ (Ω) está contenido estrictamente en L p (Ω).
Si Ω tiene medida infinita, entonces L∞ (Ω) y L p (Ω) no son comparables.
Así pues, tomando por ejemplo el caso especialmente interesante Ω = [0, 1], para 1 < p < q < ∞,
tenemos las siguientes inclusiones, todas ellas estrictas:
C[0, 1] ⊂ L∞ [0, 1] ⊂ Lq [0, 1] ⊂ L p [0, 1] ⊂ L1 [0, 1].
Nótese que C[0, 1] sí se identifica totalmente con un subespacio cerrado de L∞ [0, 1].
2.9.
Los espacios L p(µ)
La Teoría de la Medida proporciona un marco general en el que encuentran su lugar la gran
mayoría de los espacios de Banach que hemos considerado en este tema. Claro está que para
ello se necesitan algunos conocimientos básicos de dicha teoría.
Sea µ una medida (positiva, no necesariamente finita) en un conjunto arbitrario Ω. Denotemos por L(µ) al espacio vectorial de todas las funciones medibles de Ω en K, identificando
funciones que coincidan c.p.d. con respecto a la medida µ. Podemos entonces definir, para
1 6 p < ∞:
Z
L p (µ) = f ∈ L(µ) : | f (t)| p dµ(t) < ∞ .
Ω
Con la versión adecuada de la desigualdad de Minkowski, comprobamos que L p (µ) es un subespacio vectorial de L(µ) que, con la norma:
k f kp =
Z
1/p
| f (t)| dµ(t)
p
Ω
( f ∈ L p (µ))
se convierte en un espacio de Banach, pues el Teorema de Riesz-Fisher es igualmente válido en
este ambiente más general. Lo mismo ocurre en el caso p = ∞, tomando
L∞ (µ) = f ∈ L(µ) : ess sup | f | < ∞ ,
con la norma:
k f k∞ = ess sup | f |
Como casos particulares tenemos:
( f ∈ L∞ (µ)).
2. Ejemplos de espacios normados y espacios de Banach
21
Sea Λ un conjunto no vacío arbitrario y, para cada subconjunto E ⊆ Λ, sea µ(E) el número
de elementos de E, entendiendo que el conjunto vacío tiene 0 elementos y que µ(E) = ∞
cuando E es infinito. Obsérvese que todo subconjunto de Λ es medible y que no tenemos
más conjuntos de medida nula que el vacío. Por tanto, todas las funciones de Λ en K son
medibles y dos funciones que coincidan c.p.d. son idénticas. Se comprueba sin mucha
dificultad que para 1 6 p 6 ∞, se tiene L p (µ) = l Λ
p . En particular, como ya sabíamos,
N
L p (µ) = l p cuando Λ es finito con N elementos y L p (µ) = l p si Λ es infinito numerable.
Si µ es la medida de Lebesgue en un conjunto medible con medida positiva Ω ⊆ RN , es
claro que L p (µ) = L p (Ω) para 1 6 p 6 ∞.
Los espacios de la forma L p (µ) para alguna medida µ reciben el nombre genérico de espacios
L p o también espacios de Lebesgue (de ahí la letra L), pues son las propiedades clave de la
integral de Lebesgue (concretamente el Teorema de la Convergencia Dominada) las que hacen
que estos espacios sean completos. Para los "hermanos pequeños" de la familia usamos la letra
minúscula l.
 0
0
Anuncio
Documentos relacionados




Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados