TEMA 9
Anuncio

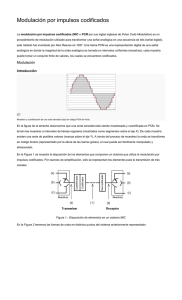
TEMA 9 LAS TECNICAS MIC INTRODUCCION En este tema se van a repasar las técnicas MIC, que son las técnicas que nos permiten convertir señales vocales analógicas en digitales y viceversa. La manera más habitual de aplicar las técnicas MIC: a los canales vocales convierte a estos en flujos digitales de 64 Kbits/s, pero existen otras maneras de aplicar las técnicas MIC como son las técnicas MIC diferencial y la modulación delta de las cuales se hace una breve reseña al final del tema. El objetivo principal de este tema es que Vd. comprenda como un canal vocal analógico es convertido en una señal digital de 64 Kbits/seg y viceversa, de manera que estas señales puedan ser transmitidas con las ventajas de la transmisión digital calidad y economía. ESQUEMA DE CONTENIDO OPERACIONES FUNDAMENTALES - El muestreo - La cuantificación. - La codificación. - Decodificación y filtrado. CANAL MIC OTROS METODOS DE MODULCION DE IMPULSOS - MIC Diferencial - Modulación delta. REDES DIGITALES Y TECNOLOGIAS EMERGENTES. 1 2.1 OPERACIONES FUNDAMENTALES La modulación por Impulsos codificados MIC: (en inglés PCM-Pulse Code Modulation), es el procedimiento más utilizado en telefonía para convertir una señal analógica en digital viceversa. Esta conversión se basa en tres operaciones fundamentales: muestreo, cuantificación codificación. a) Muestreo Es el proceso mediante el cual se transforma una señal analógica en una serie dé impulsos de distinta amplitud, llamados muestras. De acuerdo con la teoría de la información, si queremos enviar una señal de frecuencia de un punto a otro, no es necesario transmitir la señal completa. Es suficiente transmitir muestras trozos de la señal tomadas, por lo menos, a una velocidad doble de la frecuencia máxima de la señal. Esto es lo que se conoce con el nombre de teorema de muestreo. Así, por ejemplo, para transmitir una señal de frecuencia máxima de 4 Khz., es suficiente con tomar muestras a una velocidad de 8 Khz. o más elevada. En estas condiciones, en el terminal distante se puede reconstruir la señal original a partir de sus muestras. En principio de muestreo se ilustra gráficamente en la Fig. 2.1. AMPLITUD SEÑAL ORIGINAL AMPLITUD L17UD AMPLITUD UD MUESTRAS SEÑAL RECONSTRUIDA Figura 2.1. Muestreo 2 La rapidez, o frecuencia, con que se toman las muestras se llama frecuencia de muestreo (fr), pudiéndose expresar en número de muestras por segundo o en hercios. b) Cuantificación Las muestras obtenidas a partir de la señal original no se envían directamente a línea, como podría pensarse en principio a la vista de la fig. 2.1, ya que poseen muy poca inmunidad al ruido. Estas muestras tienen un rango de amplitudes que varía de forma continua. Como no podemos pensar en transmitir las infinitas amplitudes distintas que se pueden presentar, lo que se hace es dividir este rango continuo de amplitudes en un número limitado de Intervalos, llamados intervalos de cuantificación, de forma que a todas las muestras cuya amplitud cae dentro de un mismo intervalo, se les asigna ese intervalo de cuantificación. Este proceso se conoce con el nombre de cuantificación y se ilustra en la fig. 2.2 Figura 2.2. Cuantificación En la cuantificación se introduce un error en la amplitud de las muestras, ya que se sustituye su amplitud real por una aproximada. A este error se le llama error de cuantificación. 3 c) Codificación Una vez cualificadas las muestras, se codifican según un código determinado, el código utilizado en los sistemas MIC es el código binario simétrico. Mediante este código se representa la amplitud de cada muestra cuantificada mediante un número binario, en el que el primer bit indica el signo de la muestra. Sí la muestra es positiva, el primer bit es un “l” y si la muestra es negativa, el primer bit es un "0". El resto de los bits binarios nos dan el valor absoluto de la amplitud de la muestra cuantificada. Lógicamente, cuando la señal numérica llega al terminal distante, ha de ser sometida a los procesos inversos a los efectuados en el lado emisor. Estos procesos son: decodificación, reconstrucción de las muestras y obtención de la señal analógica a partir de estas últimas mediante un filtro paso-bajo. 2.1.1 El Muestreo El proceso de muestreo consiste en tomar valores instantáneos de una señal analógica, a intervalos de tiempo iguales. A los valores instantáneos obtenidos se les llama muestras. Este proceso se ilustra en la fig. 2.3 y se conoce con el nombre de muestreo ideal, por considerarse muestras instantáneas de anchura nula. Figura 2.3. Muestreo Ideal El ideal muestreo no es físicamente realizable. En la práctica, una muestra es una medida de valor instantáneo de una señal, pero tomada durante un tiempo que es muy corto comparado con el tiempo entre dos muestras consecutivas. A este tipo de muestreo se le llama muestreo real y se representa en la fig. 2.4. 4 Figura 2.4. Muestreo real Después del muestreo, la señal obtenida es un tren de impulsos, cada uno de los cuales tiene una amplitud igual al valor que tenía la señal en el instante del muestreo En el caso del muestreo real la muestra no se toma en un instante, sino durante un cierto tiempo. El muestreo se puede considerar también como un proceso de modulación en amplitud de un tren de impulsos (ver fig. 2.5). Por eso, a la señal muestreada se la llamada algunas veces señal M.I.A. Modulación de Impulsos en Amplitud. En inglés P.A.M. – (Pulse Amplitude Modulation). Figura 2.5. El muestreo como modulación de Impulsos en amplitud. 5 El muestreo se efectúa siempre a un ritmo uniforme, que viene dado por la frecuencia de muestreo fm. La condición que debe cumplir fm, viene dada por el teorema de muestreo que, para el caso de una señal que como la señal vocal contiene distintas frecuencias, se puede enunciar de la siguiente forma: "Si una señal contiene únicamente frecuencias inferiores a fmax queda completamente determinada por muestras tomadas a una velocidad igual o superior a 2 fmax. De acuerdo con el teorema del muestreo, las señales telefónicas de frecuencia vocal (que ocupan la banda de 300a 3.400 Hz), se han de muestrear a una frecuencia igual o superior a 6.800 Hz (2 x 3.400). En la práctica, sin embargo, se toma una frecuencia de muestreo fm= 8.000 Hz. Es decir, se toman 8.000 muestras/segundo que corresponden a una separación entre muestras de: T =1/8000 = 0,000125 seg = 125 µs Por tanto dos muestras consecutivas de una misma señal están separadas 125 µs que es el período de muestreo. 2.1.2. La Cuantificación La cuantificación es el proceso mediante el cual se asignan valores, discretos, a las amplitudes de las muestras obtenidas en el proceso de, muestreo. Tras la cuantificación las muestras serán de tipo digital ya que solo podrán tener un número finito de valores. Ya hemos visto que las muestras obtenidas en un muestreo real tienen una duración o anchura finita, pero su amplitud puede tomar infinitos valores comprendidos entre el valor 0 y el valor más alto de la señal a muestrear Sin embargo, se puede utilizar un número finito de valores discretos para representar en forma aproximada la amplitud de las muestras. Para ello, toda la gama de amplitudes que pueden tomar las muestras, o gama de funcionamiento, se divide en intervalos iguales y a todas las muestras cuya amplitud cae dentro de un intervalo, se les da el mismo valor. Este proceso se denomina cuantificación, y a cada intervalo en que se ha dividido la gama de funcionamiento se le llama intervalo de cuantificación. Así pues, lo que se hace en el proceso de cuantificación es asignar a cada muestra el intervalo de cuantificación que le corresponde. Dentro de una determinada gama de funcionamiento, cada intervalo de cuantificación está limitado por dos valores de decisión. Los valores de decisión situados en los extremos de la gama de funcionamiento se llaman valores virtuales de decisión, y limitan la máxima amplitud de señal que se puede transmitir sin recorte de crestas. 6 Se llama nivel de sobrecarga al nivel que tiene una señal sínusoidal cuyos valores de pico coinciden con los valores virtuales de decisión. En los MIC europeos el nivel de sobrecarga corresponde al nivel de +3,14 dBm. En la fig. 2.6 se visualiza estos conceptos Figura 2.6. Cuantificación El proceso de cuantificación introduce necesariamente un error, ya que se sustituye la amplitud real de la muestra, por un valor aproximado. A este error se le llama error de cuantificación. En realidad, el error de cuantificación se aprecia al realizar el proceso de decodificación descuantificación, porque en la cuantificación propiamente dicha se hace corresponder a cada muestra un intervalo de cuantificación, que en la operación inversa a la cuantificación dará como resultado una muestra de amplitud igual al valor medio de esté intervalo de cuantificación. Así pues, el error de cuantificación se comete en la realización de las operaciones de cuantificación y descuantificación. El error de cuantificación se puede reducir aumentando el número de intervalos de cuantificación, pero existen limitaciones de tipo práctico que obligan a que el número de intervalos no sobrepase un determinado valor. Una cuantificación en la que todos los intervalos tienen la misma amplitud, se llama cuantificación uniforme. El error de cuantificación introducido en cada muestra, da lugar a una deformación o distorsión de la señal reconstruida que se denomina distorsión o ruido de cuantificación. El efecto de la distorsión de cuantificación es similar al de un ruido aleatorio superpuesto a la señal. Por tanto, la relación entre el nivel de la señal, y el nivel de la distorsión de cuantificación, ha de ser tal, que dicha distorsión resulte inapreciable por el oído humano. En una cuantificación uniforme la distorsión o ruido de cuantificación es la misma cualquiera que sea el nivel de la señal que se muestrea. 7 Con lo cual, la relación seña/ruido va empeorando al disminuir el nivel de la señal de entrada. La situación se hace ya inadmisible para señales cuya amplitud es similar a la de un intervalo de cuantificación. En la figura 2.7 se puede ver que para señales de amplitud muy pequeñas, el error es casi tan grande como las muestras. Figura 2.7. Error en la cuantificación uniforme Si con este tipo de cuantificación uniforme queremos mantener una relación seña/ruido aceptable para las señales de nivel bajo, es necesario dividir la gama de funcionamiento de las señales vocales en 4.096 intervalos de cuantificación, lo cual daría lugar a una relación señal/ruido innecesariamente buena para las señales de nivel alto. Además, como cada intervalo de cuantificación lo vamos a representar mediante un número binario, para representar los 4096 intervalos se necesitarían números binarias de 12 bits por intervalo (pués 212= 4.096), lo que daría lugar a un excesivo ancho de banda en línea, ya que el ancho de banda depende directamente del número de bits empleados para representar cada intervalo y, por consiguiente, del número de intervalos. Por lo tanto, hemos de buscar un procedimiento en el cual la relación señal/ruido sea aceptable con el menor número posible de intervalos de cuantificación. El problema se resuelve utilizando una cuantificación no uniforme, en la cual se toma un número determinado de intervalos y se distribuyen de forma no uniforme de manera que son más pequeños los intervalos correspondientes a las muestras más pequeñas y son más grandes los intervalos correspondientes a las muestras más grandes. De esta forma, para las señales débiles es como, si se utilizase un número muy elevado de niveles de cuantificación, con lo que se produce una disminución de la distorsión de cuantificación, con la consiguiente mejora de la relación señal/ruido. Sin embargo, para las señales fuertes se tendrá una situación menos favorable que la correspondiente a una cuantificación uniforme, pero todavía suficientemente buena. 8 El proceso de cuantificación no uniforme que se aplica a las señales vocales utiliza una característica de cuantificación o ley de codificación del tipo de segmentos. Cuando se utiliza una ley de codificación de segmentos la gama de funcionamiento se divide en un, número determinado de grupos de intervalos de cuantificación (cada grupo es un segmento de la ley) y cada grupo (segmento) se divide en un cierto número de intervalos de cuantificación de manera que todos los intervalos de cuantificación del mismo segmento son iguales entre sí, pero, en general, distintos de los intervalos de cuantificación de los otros segmentos. Hay dos leyes de codificación recomendadas por el CCITT para las señales de frecuencia vocal y las dos son de segmentos. Estas leyes son la ley A utilizada en los sistemas MIC europeos y la ley µ utilizada en los sistemas MIC americanos. La ley A está formada por 16 segmentos de recta, de los cuales los cuatro centrales están alineados, por lo que se consideran uno sólo, reduciéndose los 15 segmentos a 13. Cada uno de los 16 segmentos está dividido en 16 intervalos de cuantificación iguales entre sí, pero desiguales de unos segmentos a otros, excepto en los 4 segmentos centrales en los que son iguales todos los intervalos de cuantificación. En la figura 2.8 se representa la ley A de codificación. De esta forma, para las señales débiles es como, si se utilizase un numero muy elevado de niveles de cuantificación, con lo que se produce una disminución de la distorsión de cuantificación, con la consiguiente mejora de la relación señal/ruido. Sin embargo, para las señales fuertes se tendrá una situación menos favorable que la correspondiente a una cuantificación uniforme, pero todavía suficientemente buena. El proceso de cuantificación no uniforme que se aplica a las señales vocales utiliza una característica de cuantificación o ley de codificación del tipo de segmentos. Cuando se utiliza una ley de codificación de segmentos la gama de funcionamiento se divide en un, número determinado de grupos de intervalos de cuantificación (cada grupo es un segmento de la ley) y cada grupo (segmento) se divide en un cierto número de intervalos de cuantificación de manera que todos ¡os intervalos de cuantificación de¡ mismo segmento son iguales entre sí, pero, en general, distintos de los intervalos de cuantificación de los otros segmentos. Hay dos leyes de codificación recomendadas por el CCITT para las señales de frecuencia vocal y las dos son de segmentos. Estas leyes son la ley A utilizada en los sistemas MIC europeos y la ley u utilizada en los sistemas MIC americanos. La ley A está formada por 16 segmentos de recta, de los cuales los cuatro centrales están alineados, por lo que se consideran uno sólo, reduciéndose los 16 segmentos a 13. 9 Cada uno de los 16 segmentos está dividido en 16 intervalos de cuantificación iguales entre sí, pero desiguales de unos segmentos a otros, excepto en los 4 segmentos centrales en los que son iguales todos los intervalos de cuantificación. En la figura 2.8 se representa la ley A de codificación. Figura 2.8. Ley "A" Como puede verse en la figura 2..8. en el eje de ordenadas, en los sistemas MIC europeos la gama de funcionamiento se encuentra dividida en 256 intervalos de cuantificación (128 corresponden a muestras positivas y 128 corresponde a muestras negativas), que se agrupan. de 16 en 16, en (8 segmentos para muestras positivas y 8 segmentos para muestras negativas). Normalmente, a los cuatro segmentos de la parte central de la gama de funcionamiento se les considera un único segmento (el 7) de manera que la ley A se conoce desafortunadamente corno ley A de 13 segmentos. 10 Síntesis Las técnicas MIC permiten convertir las señales analógicas en digitales Comprenden tres operaciones básicas: muestreo, cuantificación y codificación. Muestreo: Consiste en tomar valores instantáneos de una señal a intervalos de tiempo iguales. Puede ser ideal o real. Teorema de¡ muestreo: Una señal analógica puede ser reconstruida a partir de sus muestras siempre que éstas se tomen con una frecuencia mayor al dobla de la frecuencia máxima de la señal muestreada. El tren de muestras también se denomina señal MIA. Cuantificación: Es el proceso mediante el cual se asignan valores discretos a las amplitudes de las muestras de la señal MIA. Puede ser uniforme y no uniforme. La cuantificación no uniforme mejora la relación sin aumentar el número de intervalos de cuantificación. En la cuantificación la gama a de funcionamiento se divide en un cierto número de intervalos de cuantificación cada uno de los cuales está limitado por dos valores de decisión. La ley de compresión recomendada por el CCI TT para los MIC Europeos es la ley A de 13 segmentos. 2.1.3 La Codificación. La codificación es el proceso mediante el cual se representa una muestra cuantificada, mediante una sucesión de "1s'', y "0's", es decir mediante una secuencia binaria. Como en los MIC europeos se utilizan 256 intervalos de cuantificación para representar todas las posibles muestras, se necesitan secuencias binarias de 8 bits para representar a todos los intervalos de cuantificación (pues 28= 256). Un grupo de ocho bits de este tipo, constituye una palabra M.I.C (Ver figura 2.9) Figura 2.9 codificación 11 (P) define la polaridad de la muestra. (A) define el segmento de recta dentro del cual cae la amplitud de la muestra a codificar. (B) define el intervalo que representa a la muestra, en el segmento de recta ya localizado. Como (P) comprende un sólo bit, únicamente son posibles 2 estados distintos ("1" y "0"); la polaridad de las muestras positivas se representa por un “1", y la de las muestras negativas por un "0". (A) comprende tres bits mediante los cuales se pueden localizar 23= 8 segmentos de recta para cada polaridad, es decir, un total de 16 segmentos que son los que tiene la ley A. Estos 16 segmentos tienen la siguiente codificación (ver también la fig. 2.8). Segmento Segmento Positivo nº Código negativo nº Código ------------------------------------------------------------------------------------------------------------13 12 11 10 9 8 7 7 (16) (15 ) (14) (13) (12) (11). (10) (9) 1111 1110 1101 1100 1011 1010 1001 1000 7 (8) 7 (7) 6 5 4 3 2 1 0000 0001 0010 0011 0100 0101 0110 0111 El número entre paréntesis indica el número que tendría cada segmento, si no hubiésemos agrupado los cuatro segmentos centrales con el número 7. (B) comprende cuatro bits, que permiten determinar 24=16 intervalos posibles en cada segmento de recta. Los 16 intervalos Posibles dentro de cada segmento, tienen la siguiente codificación: Intervalo nº -------------1 2 3 4 5 6 código ------------0000 0001 0010 0011 0100 0101 12 7 8 9 10 11 12 13 14 15 16 0110 0111 1000 1001 1010 1011 1100 1101 1110 1111 Como hay 16 segmentos habrá un de 16 x 16 = 256 intervalos de cuantificación, que son los recomendados por el CCITT. Otra manera de ver cómo se realiza el proceso de codificación es numerar desde 0 a 127 los intervalos de cuantificación positivos Los negativos se numeran igual de forma simétrica a los positivos (código binario simétrico. Una vez hecho esto la codificación se reduce a poner el bit de signo y poner el intervalo de cuantificación en forma de número binario. Una vez efectuada la codificación, en la palabra MIC obtenida se invierten los bits pares, es decir, los bits 2, 4, 6 y 8 con el fin de evitar la existencia de un elevado número de ceros cuando el canal está libre, es decir, sin señal. Estos ceros serían un inconveniente en el momento de enviar la señal a línea, aunque actualmente con el empleo del código HDB3 queda paliado este problema. Veamos algún ejemplo práctico de codificación: La palabra MIC 01011101 representa la codificación de una muestra negativa (pues el bit de polaridad es un 0 localizada en el segmento 3 y representada por el intervalo 14 del segmento 3. Al invertir los bits pares esta palabra saldría a línea con un contenido de información equivalente a 00001000. En la mayoría de las aplicaciones prácticas las funciones de cuantificación y codificación se realizan simultáneamente en un mismo circuito. El dispositivo que realiza la cuantificación y la codificación se llama codificador. Si la cuantificación que se realiza es uniforme, el codificador se llama lineal, y si la cuantificación es no uniforme, el codificador se llama no lineal 2.1.4 Decodificación y filtrado La decodificación es el proceso mediante el cual se reconstruyen las muestras a partir de la señal numérica procedente de línea. En realidad su función es la de decodificaci6n y descuantificación. Este proceso se realiza en un dispositivo denominado decodificador. 13 Al conjunto de un codificador y de un decodificador en un mismo equipo, se le llama codec. Con el fin de que el error entre las muestras transmitidas y las reconstruidas sea mínimo, las muestras se reconstruyen con una amplitud igual al valor central del intervalo de cuantificación al que pertenecen. En la fig. 2.10 podemos ver esta reconstrucción. Figura 2.10. Decodificación Una vez recuperadas las muestras, sólo es necesario hacer pasar el tren de muestras por un filtro paso bajo adecuado para recuperar la señal analógica original. CANAL MIC En los puntos anteriores hemos visto que cuando se aplican las técnicas MIC a los canales vocales, se muestrea la señal con una velocidad de 8.000 muestras/seg. Como cada muestra la codificamos con ocho bits, resulta que un canal vocal queda transformado en un circuito de 8.000 muestras/seg. x 8 bits/muestra = 64.000 bits/seg. A esta señal de datos de 6.4.000 bits/seg se le denomina canal MIC. Sintesis 14 La codificación es la operación que ¿socia a cada muestra cuantificada una palabra MIC de 8 bits según el código binario simétrico. Para recuperar la señal analógica a partir de la señal digital obtenida con las técnicas MIC, es preciso decodificar las palabras MIC, reconstruyendo las muestras con una amplitud igual al valor central del intervalo de cuantificación que le ha correspondido. El tren de muestras obtenido es posteriormente filtrado, con lo cual obtenemos una señal analógica igual a la original pero con la distorsión de cuantificación. Se denomina canal MIC al flujo de 64.000 bits/seg. en que se convierte un canal vocal al aplicar las técnicas MIC. 2.3 OTROS METODOS DE MODULACION POR IMPULSOS Además de la modulación por impulsos codificados, existen otros métodos de modulación por impulsos, entre los que destacan por su importancia, la MIC diferencial (MICD) y la modulación delta (MD). 2.3.1 LA M.I.C. DIFERENCIAL En las señales de frecuencia vocal, predominan generalmente las bajas frecuencias, por ello las amplitudes de dos muestras consecutivas difieren generalmente en una cantidad muy pequeña. Aprovechando esta circunstancia, se ha ideado la MICD. En la MICD, en lugar de tratar cada muestra separadamente, se cuantifica y codifica la diferencia entre una muestra y la que te precede. Como el número de intervalos de cuantificación necesarios para cuantificar la diferencia entre dos muestras consecutivas es lógicamente inferior al necesario para cuantificar una - muestra aislada, la MICD permite una reducción sensible de la frecuencia de transmisión en línea, ya que esta es proporcional al número de intervalos de cuantificación En la fig. 11 se representa el diagrama de bloques de un terminal MICD. En el instante k, la muestra Ak se compara con una aproximación a la muestra precedente A'k-1 en el comparador C. La diferencia resultante se cuantifica y codifica como en la MIC. La señal codificada se envía a línea, pero también se decodifica localmente y se añade en el integrador I el valor A'k-1 que estaba almacenado en I. En el instante siguiente, I envía a C una aproximación A'k de la muestra Ak para compararla con la nueva muestra que se tome Ak+l. Este proceso continua indefinidamente. 15 FIG. 11 DIAGRAMA DE BLOQUES DE UN TERMINAL MICD 2.3.2 LA MODULACION DELTA Si en un sistema MICD si vamos aumentando la frecuencia de muestreo, llega un momento en que dos muestras consecutivas tienen una amplitud tan próxima, que no se necesita más que un solo intervalo de cuantificación para cuantificar la diferencia. En este caso solo se necesitaría un bitio por muestra, y la velocidad de transmisión en línea sería igual a la velocidad de muestreo. Este tipo de modulación se conoce con el nombre de modulación delta (MD) En la fig. 12 se representa el diagrama señales obtenidas en un terminal da MD. FIG. 12 DIAGRAMA DE BLOQUES Y SEÑALES EN UN TERMINAL DE M.D. En este tipo de modulación, se determina en el comparador C el signo (no la magnitud) de la diferencia entre la muestra Ak y la aproximación de la muestra precedente A'k-l. La codificación es muy sencilla: se transmite cuando Ak es mayor que A'k-1 y se transmite un "0" en caso contrario. En el primer caso, el integrador incrementa su salida en un escalón unidad positivo y en el segundo caso reduce su salida en un escalón unidad negativo. 16 El resultado es una curva escalonada que se aproxima a la señal de entrada. La curva escalonada se obtiene comparando la amplitud real de la señal de entrada, en un instante determinado, con la amplitud del escalón precedente La modulación delta descrita, se denomina modulación delta lineal (MDL) porque la magnitud de la variación producida a la salida del integrador I es fija. Existen otros tipos de modulación delta mas sofisticados, en los cuales dicha variación no es fija sino que depende de las variaciones de la señal de entrada. La modulación delta se puede aplicar en telefonía lo mismo que la MIC, para conseguir sistemas de transmisión multicanales. 17 RESUMEN Las técnicas ventajas de la MIC permiten convertir una sella¡ analógica en digitales con el fin de aprovechar las transmisión digital. Las técnicas MIC se basan en tres operaciones: muestreo, cuanlificación y codificación. Una vez transmitida la señal, para recuperar la señal analógica original es preciso realizar las operaciones inversas (decodificación, recuoeraci6n de las muestras y filtrado). Muestreo: Es el proceso mediante el cual se transforma una señal analógica en una serie de impulsos de distinta amplitud llamada tren de muestras o señal MIA El muestreo realizado es el real que supone muestras con una cierta duración, aunque esa duración es pequeña comparada con el tiempo entra dos muestras consecutivas. Se llama frecuencia de muestreo a la frecuencia con que se toman las muestras. Esta frecuencia tiene que ser constante. Teorema de Muestreo: Es posible recuperar una señal analógica a partir de sus muestras, siempre que estas hayan sido tomadas con una frecuencia de muestreo mayor que el doble de la frecuencia máxima de la señal analógica original. Cuantificación: Es el proceso mediante el cual se sustituyen los infinitos valores que pueden las muestras por un número discreto de valores. Para ello se divide la cama de Funcionamiento en un conjunto de intervalos de cuantificación que se encuentran limitados por los valores de decisión. El límite superior e interior de la gama de funcionamiento se denominan « valores virtuales de decisión superior e inferior y coinciden con los valores de pico de una sinusoide cuyo nivel es +3,14 dBmO. A este nivel se le denomina nivel de sobrecarga. En la cuantificación a cada muestra se le da el valor correspondiente al intervalo de cuantificación, con lo cual se comete un error de cuantificación que es la diferencia entra el valor de la muestra antes de la cuantificación y después de la descuantificación (valor medio del intervalo de cuantificación). Se denomina cuantificación uniforme a aquella en que todos los intervalos de cuantificación son iguales. Se denomina cuantificación no uniforme a aquella en que se emplean intervalos de cuantificación más pequeños para las muestras más pequeñas e intervalos de cuantificación más grandes para las muestras más grandes. 18 RESUMEN El CC1TT ha recomendado para los MIC europeos la le Y A de codificación de 13 segmentos Con ella se consigue una mejora de la relación señal ruido de las señales pequeñas. Codificación: Es el proceso mediante el cual a cada muestra codificada se le hace corresponder una palabra MIC de 8 bits según un. código binario ,électrico; el primer bit corresponde al signo de la muestra, los tres siguientes al segmento, y los cuatro siguientes al intervalo de cuantificación dentro del segmento. Después de la codificación se invierten los bits pares. Con los tres procesos hemos convertido el canal vocal en un circuito de S. 000 muestras/seg. x 8 bits/muestra 64 Kbits / seg que se denomina canal MIC. Una vez transmitido el canal MIC, para recuperar la señal analógica es necesario decodificar las palabras MIC haciéndoles corresponder a las muestras el valor medio del intervalo de cuantificación Iras la cual son filtradas con un filtro paso bajo adecuado. La señal recuperada está afectada por la distorsión de cuantificación producida por los errores de cuantificación. Existen otras técnicas de modulación de impulsos Las más importantes son la MICD (MIC diferencial), que se diferencia de la MIC normal en que cuantifica y codifica las diferencias entre muestras consecutivas, y la MD (Modulación Delta), que muestrea muy rápidamente las señales de tal manera que, sólo utiliza un bit para codificar ¡a diferencia entra dos muestras consecutivas. 19 3. 1. Redes Digitales y tecnologías emergentes. 3.1.2. Ruido inducido El ruido en las conexiones digitales es la causa predominante de los errores que ocurren. El ruido se añada a la señal transmitida a lo largo del medio de transmisión y causa que la señal sea mal interpretada por el receptor. Son muchas las causas del ruido y actúan de diversa maneras. Si examinamos el espectro de ruido podemos distinguir dos tipos: ● Ruido blanco, que se caracteriza por tener un espectro de potencia igual a todas las frecuencias. Ejemplo es el ruido térmico ● Ruido 1 /f, en el que la potencia de ruido es grande a las frecuencias bajas y decrece conforme ésta aumenta. Ejemplo, el ruido impulsivo (flicker). CROSSTALK En los sistemas digitales, si el medio de transmisión no tiene los canales de transmisión suficientemente aislados, se produce la inducción de la señal transmitida en el otro canal (diafonía o crosstalk, lo que puede original errores en la decodificación de la señal. Los dos casos posibles que se dan (Figura 3.3) son: CROSSTALK (UN PAR EN OTRO) Figura 3.3. Near-End Crosstalk (NEXT) y Far-End Crosstaik (FEXT). NEXT (Near-End Crosstalk ). Ocurre entre pares que operan en sentido contrario. Es el caso más peligroso, ya que la relación entre la señal transmitida y la inducida es muy desfavorable. FEXT (Far-End Crosstalk). Ocurre entre pares que transmiten la señal en el mismo sentido. Este tipo produce alteraciones leves, ya que los niveles de señal son inferiores. 0 3.2. Sistemas de enlaces digitales En la década de los 70, numerosas administraciones de telecomunicaciones con la idea de ofrecer un mejor servicio a los usuarios deciden promover el empleo de la tecnología digital en las redes públicas, lo que, como consecuencia directa exigiría la renovación de la planta instalada, tanto de las centrales de conmutación como los medios de transmisión. Así comienza el estudio para el desarrollo e implantación de la RDSI (Red Digital de Servicios Integrados), una red con el objetivo 20 de ofrecer conectividad digital extremo a extremo lo que implica que todos los medios empleados han de ser digitales. 3.2.1. Jerarquía Digital Plesiócrona JDP) La técnica ampliamente empleada en las redes telefónicas para la transformación (proceso de muestreo, cuantificación y codificación) de las señales analógicas en digitales es conocida como MIC (Modulación por Impulsos Codificados) o PCM, que permite la utilización múltiple de una línea. Mediante la múltiplexación por división en el tiempo. Esto ha dado origen al florecimiento de toda una generación de multiplexores y la aparición de diferentes normas para la agrupación de señales en otras de orden superior (Figura 5.4); así, tenemos la jerarquía europea -basada en una velocidad de transmisión básica de 64 kbít/s y una primaria de 2.048 Kbits-, y la americana -56 kbit/s y 1.544 kbit/s, respectivamente-, además de otras, todas ellas pleisócronas, lo que dificulta la interconexión mundial y restringe el uso de equipos de diferentes fabricantes en redes públicas y/o privadas. 2 Figura 3.4. Niveles de la jerarquía Digital Plesiócrona en Europa ,Estados Unidos y Japón. El funcionamiento de la JDP es conceptualmente muy sencillo (Figura 3.5): al nivel más bajo se multiplexan las señales de entrada, por cada canal, a nivel de octeto, mientras que en los niveles superiores se hace a nivel de bit. Siempre que la velocidad sea exactamente igual para todos los canales de entrada no hay ningún problema, pero si no es así se hace necesario insertar bits de relleno (Justificación) para acomodar las velocidades de entrada a la del multiplexor. La operación de inserción y extracción de bits de justificación se realiza al multiplexar en cada uno de los niveles de la jerarquía, por lo que localizar una de las señales supone tener que demultiplexar todos los niveles uno a uno identificando y eliminando estos bits, una operación bastante compleja. 21 Figura 3.5. Niveles de multi / desmulti-plexación en la jerarquía Digital Plesiócrona. 3.2.2. SONET La jerarquía de transmisión síncrona supone un paso más en la evolución de los sistemas de transmisión, al igual que lo supuso la técnica PCM. Los primeros sistemas se empezaron a desarrollar en los Estados Unidos bajo el nombre de SONET, seguidos por los adoptados poco más tarde por el CCITT bajo la denominación de JDS. La transmisión a alta velocidad requiere el empleo de medios capaces de soportarla; así, la fibra óptica se presenta como el más adecuado para ello. En base a su empleo. En EEUU, Bellcore ha desarrollado el estándar SONET (Synchronotís Optical NETvork) que emplea la velocidad básica binaria de 51,84 Mbit/s, que constituye el primer nivel jerárquico (OC-I Optical Carrier-1), constando la trama STS-1 (Señal de Transporte Síncrono- 1) de 9 filas de 90 bytes, de los que la tara de sección ocupa 3 bytes por fila. Este estándar se encuentra recogido en las normas TI 101 a TI. 107 de ANSI. (Anierican National Standards Institute). 3.2.3. Jerarquía Digital Síncrona (JDS) La Jerarquía Digital Síncrona (JDS) o en inglés SDH normalizado por el ITU-T (Recomendaciones G.700) es un sistema de transmisión que resuelve varias de las limitaciones de la actual red de transmisión plesiócrona, entre ellas la más importantes: la sincronización. Entre sus características cabe resaltar: ● Es un estándar de transmisión mundial. ● Las tramas de JDS pueden transmitirse por fibras ópticas monomodo, multirmodo y par de cobre trenzado. ● Las tramas pueden extraerse mediante una técnica sencilla. ● Cada trama está identificada por un puntero para su localización. ● Presenta una gestión eficaz de la red. La JDS fue estandarizada por el ITU-T (antes CCITT) adoptando, en gran medida, la norma TI. 105 de ANSI. Ésta a su vez, no hizo más que adoptar como norma el sistema SONET (Synchronous Optical NETwork) creado por la empresa Bellecore. 22 Existen ligeras diferencias entre la JDS y SONET aunque son perfectamente interconectables. Una de las diferencias estriba en que el primer nivel jerárquico en SONET es de 51,84 Mbit/s (STS-1 o Synchronous Transpon Signal Level 1, también denominado OC-1 u Optical Carrier level mientras que en la JDS la velocidad básica binaria es de 155.52 Mbít/s (MTS-1), siendo éste coincidente con el nivel STS-3 de SONET. Ambos sistemas son capaces de transmitir 2.488,32 Mbit/s en su último nivel jerárquico (MTS- 16 en JDS y STS-48 en SONET). Frente a la actual JDP, el acceso primario de la JDS es de 2.048 Mbit/s y el último nivel corresponde a la velocidad de transmisión de 564,992 Mbit/s. La JDS se presenta como la futura red de transporte de los operadores de telecomunicaciones para soportar aplicaciones de los usuarios que requieran banda ancha. 3.3. Jerarquía Digital Síncrona Disponer de una red de transmisión homogénea en todo el mundo más flexible, con interfaces normalizados, fácil de gestionar y rentable, es la razón que ha llevado al desarrollo de la Jerarquía Digital Síncrona (JDS) o SDH (Synchronous Digital Hierarchy), con la idea de reemplazar a la existente plesiócrona (JDP) a largo plazo (Figura 5.6). JDS se presenta como la red de transporte futura para los servicios de banda ancha, basados en tecnologías como ATM (Modo de Transferencia Asíncrono). Figura 3.6 La Jerarquía Digital Síncrona JDS) donde va reemplazar a la plesiócrona existente, tanto en Europa como en Estados Unidos. Las ventajas de la JDS frente a las jerarquías actuales existentes, como se ha visto, entre otras son: ● Estándar de transmisión mundial, incluyendo especificaciones para interfaces ópticos, velocidades, códigos de línea y estructura de las tramas. ● Alta velocidad de transmisión sobre fibra óptica. ● Facilidad para funciones de inserción/extracción y cross/connect, debido a la capacidad de acceso directo para tributarios por encima de 64 kbit/s. ● Gestión eficaz de la red. 23 ● Aplicable a todo tipo de equipos. 3.3.1. Características de la JDS JDS es la versión europea de SONET (Figura 3.7), aunque con algunas diferencias, tales como una mayor velocidad básica, diferente estructura de la trama (matriz con 9 líneas de 270 bytes de longitud) y unidades de empaquetado. SONET Velocidad Mbits JDS OC-1 ( STS-1) 51,84 OC-3 ( STS-3) 155,52 OC-9 (STS-9) 466,56 OC-12 (STS-12) 622.08 OC-18 (STS-18) 933,12 OC-24 (STS-24) 1.244,16 OC-36 (STS-36) 1.866,24 OC-48 (STS-48) 2.488,32 (MTS-1) (MTS-4) (MTS-16 Figura 3.7.Tabla comparativa entre las velocidades normalizadas en SONET y JDS., 5.3.2. Normativa para la JDS Las normas sobre JDS (interfaces, tramas y velocidades binarias) están recogidas en la serie de recomendaciones G.700 del CCITT (libro azul de 1988). Las más importantes son: • • • • G.707: Velocidades binarias de la JDS. G.708: Interfase del nodo de red en la JDS. G.709: Estructura de la múltiplexación síncrona. G.704: Gestión de la JDS. La trama múltiplex primaria de 2,048 Mbit/s es la única realmente síncrona en la transmisión digital, ya que no emplea bits de relleno ni punteros. Los sistemas múltiplex plesiócronos requieren de una señal de alineación de trama para recuperar el sincronismo en el receptor, por los que la velocidad binaria de un sistema de orden "n" es algo mayor que la suma de las velocidades tributarias correspondientes, ya que requiere una serie de bits adicionales para enviar información de la trama y de relleno. Esto, complica enormemente la inserción/extracción de tramas y hace que los sistemas JDP sean muy poco flexibles, ya que, por ejemplo, para extraer una trama de 64 kbit/s de un flujo de velocidad superior hay que proceder paso a paso -demultiplexación- bajando de uno a otro nivel sin posibilidad de hacerlo directamente. 3.3.3. Estructura de la trama 24 En JDS, los flujos de datos digitales de los sistemas básicos mediante un proceso de entramado, forman señales de mayor velocidad y orden jerárquico superior, siendo las señales múltiplex de orden superior (MTS-4 a 622,080 Mbit/s MTS-16 a 2.488.320 Mbit/s) múltiplos enteros de la velocidad binaria básica (MTS-1/Módulo de Transporte Síncrono1) de 155,520 M.bit/s (OC-3). Los multiplexores síncronos colocan -empaquetan- las señales afluentes procedentes de la jerarquía plesiócrona en contenedores virtuales (CV) que poseen un tamaño uniforme. JDS se basa. pues, en la utilización del Módulo de Transporte Síncrono de 155,52 Mbit/s, cuatro de los cuales se intercalan para formar el STM-4 a 622,08 Mbit/s y 16 de ellos para formar el STM-16 a 2.488,32 Mbit/s. En la Figura 5.8 se aprecia la relación existente entre los módulos STM de la JDS Y los niveles de múltiplexación de la JDP. Figura 3.8 relación existente entre los módulos STM de la JDS y los niveles de mulfiplexación de la JDP. 5.3.4. Contenedores La capacidad de transmisión que proporciona la trama STM es divisible dinámicamente mediante los llamados contenedores, de los que existen varios tipos, según se muestra en la Figura 5.9; C-12 para las señales primarias en Europa a 2.049 Mbit/s, C- 11 para las americanas de 1,544 Mbit/s, C-4 para las señales cuaternarias a 139,264 Mbit/s, etc., siendo estos contenedores los que proporcionan la transmisión de las señales procedentes de las distintas jerarquías. A éstos se les añade además, una cabecera que constituye la tara del trayecto (POH/Path OverHead), que aporta información sobre estado del trayecto, canales, errores, etc., para formar lo que se denomina un Contenedor Virtual (CV). Contenedores Virtuales CV Señal Tributaria 1,5 Mbit/s VC-11 VC- 12 VC- 21 VC 3 VC- 4 21 2 Mbit/s 6 Mbit/s 34 y 45 Mbit/s 140 Mbit/s Figura 3.9. Contenedores Virtuales y sus señales tributarias de la JDS. 3.3.5. Sectores 25 Una trama JDS se denomina módulo de transporte Síncrono de primer nivel (MTS-1) y consta de 2.430 bytes u octetos (270 columnas x 9 líneas), con una duración de 125 µs. Se divide en tres sectores principales: la tara de sección, los punteros de unidades administrativas y el área de carga útil (Figura 3. 10). Figura 3.10. Una trama JDS se divide en tres sectores principales: la tara de sección, los punteros de unidades administrativas y el área de carga útil. La tara de sección (SOH) además de los bytes necesarios para la sincronización de tramas, comprende una serie adicional para fines de gestión e identificación. Los punteros de unidades administrativas indican el inicio de los contenedores virtuales (CV) dentro de la trama MTS- 1. El puntero permite localizar directamente cada canal de datos en todas las tramas MTS- 1. El área de carga útil es la reservada a los datos de usuario (bytes 10 al 270). Los canales tributarios individuales se transportan en este campo y pueden ser afluentes procedentes de todos los niveles de la JDP. 3.4. ATM. Modo de transferencia asíncrono A mediados de la década de los 80 el CCITT empieza a trabajar en una segunda generación de la RDSI, conocida como RDSI de Banda Ancha. En su reunión de 1988 en Seúl, se propone la recomendación de utilizar la tecnología ATM para la RDSI-BA Con la idea de soportar nuevas aplicaciones, como el vídeo o la imagen de alta definición, la extensión del ancho de banda por encima de los 150 Mbit/s se hace evidente; de aquí surgen nuevas técnicas, basadas en el tratamiento de células sobre un medio Síncrono de transmisión (SDH/Jerarquía Digital Síncrona) y de conmutación (ATM/Modo de Transferencia Asíncrono), frente a las tradicionales PDH y STM, que constituyen los fundamentos de la nueva RDSI-BA. Para aprovechar al máximo la capacidad de transmisión que ofrece la SDH se necesita una técnica de conmutación capaz de tratar cualquier tipo de información, al tiempo que optimiza la utilización del ancho de banda, sobre la base de asignación bajo demanda, como es ATM. En el período de estudio comprendido entre 1984 y 1988 el CCITT concluye con la recomendación 1.121 (Aspectos de Banda Ancha de la RDSI) y define el formato de una célula ATM, como compuesto por una cabecera (header) de 5 bytes u octetos y un campo de información (payload) de 48, de lo que resultan 53 bytes (Figura 3. 11) 26 Figura 3.11. Formato de una celda ATM, con la cabecera y datos de usuario. Al estar basado ATM en paquetes de longitud reducida y fija, se simplifica en gran medida el diseño de los conmutadores, se reduce el retardo de proceso -puede efectuarse por hardwarey se disminuye su variabilidad, lo que resulta esencial para aquellos servicios sensibles al mismo, como los de voz o vídeo. Las células con una longitud fija también implican el uso de buffer de longitud fija para gestionar el tráfico y evitar las congestiones y, por extensión, técnicas de control más sencillas. 3.4.1. Conceptos básicos en ATM ATM es una técnica de transferencia rápida de información binaria de cualquier naturaleza, basada en la transmisión de células de longitud fija, sobre las actuales redes plesiócronas (PDH) y/o síncronas (SDH). Debido a su naturaleza asíncrona, un flujo de células ATM puede ser transportado de forma transparente como una serie de bytes estandarizados, tanto en una trama PDH como en un contenedor SDH, de esta manera no es necesario realizar grandes inversiones en infraestructura de red (Figura 3.12). La cabecera consta de dos campos independientes (VPI y VCI) que identifican a la célula y la conexión virtual a la que pertenece. Antes de la emisión de una célula se establece una conexión virtual extremo-a-extremo mediante un procedimiento de control que acepta o rechaza la misma, en base al grado de servicio solicitado y otros parámetros definidos por el usuario. Figura 3.12. ATM es adecuado para transportar cualquier tipo de información, con independencia de su naturaleza Como ATM es una tecnología de múltiplexación orientada a conexión, la señalización constituye uno de sus aspectos fundamentales, ya que se pone en marcha siempre al querer establecer una conexión. Solamente en el caso en que el destino acepte la llamada, por medio de 27 un proceso de negociación entre los extremos, se establece la misma, dando lugar a la apertura de un canal virtual. Uno de los aspectos a tener en cuenta en el proceso de negociación es la calidad de servicio (QoS/Quality of Service) -parámetros de caudal, retardo y seguridadsolicitada y aceptable que, en función de si es posible o no de satisfacer por la red, dará lugar a la aceptación o rechazo de la llamada. 5.4.2. Niveles de ATM El modelo para ATM de la RDSI-BA consta de tres niveles, siguiendo la estructura de capas del modelo OSI, que definen como los distintos tipos de tráfico se pueden mezclar en la misma red (Figura 3.13); estos son: Figura 3.13. ATM contempla distintos niveles para soportar tráfico de voz, datos y vídeo. ● Nivel de adaptación AAL (ATM Adaptation Layer) Nivel de Adaptación, que es el superior y establece la relación entre el dispositivo que genera el tráfico y el siguiente nivel; es el que da a ATM la flexibilidad para transportar distintos tipos de servicio dentro del mismo formato. El principal propósito de este nivel es solucionar cualquier diferencia existente entre un servicio requerido por un usuario y los disponibles en el nivel AAL. Este nivel lee la información de usuario celdas para comprobar que no existen errores de transmisión. Formado por dos subniveles: "Segmentación y Reensamblaje", en el que los diferentes tipos de información se combinan en un único flujo de datos, y "Convergencia", que segmenta este flujo en bloques de 48 octetos. Este nivel esta dividido en cinco clases, en función de las características del tráfico a manejar: AAL 1 (servicio de emulación de circuitos, con velocidad binaria constante [CBR] y orientado a conexión), AAL 2 (vídeo bajo demanda [vídeo comprimido], con velocidad binaria variable [VBR] y orientado a conexión), AAL3/4 (Frame Relay y SMDS, con y sin conexión) y AAL 5, una versión más efectiva de la anterior, (Frame Relay, con y sin conexión, adecuado para la conexión de LANs de alta velocidad). ● AAL-1 se usa para la transferencia constante de bits CBR (Constant Bit Rate) los cuales son dependientes del retardo. Por lo tanto, la red ATM provee un determinado ancho de banda para toda la comunicación. Se utiliza para aquellas aplicaciones sensibles al retardo tales como la videoconferencia y la videotelefonía. 28 El servicio CBR queda definido por un único parámetro, la tasa máxima de transmisión de celdas PCR (Peak Cell Rate). El PCR se mide en celdas por segundo y dado que las celdas tienen un número fijo de bits este parámetro puede también darse en bits por segundo. Todas las celdas transmitidas por el usuario hasta el PCR tienen garantía estadística de llegar a su destino. Las celdas trasmitidas por encima de esa velocidad son directamente descartadas. ●AAL-2. Este servicio del nivel AAL se utiliza para servicios orientados a conexión, dependientes del retardo y con transferencia de datos a una velocidad de transmisión variable VBR (Variable Bit Rate). Las aplicaciones que más se adaptan a este tipo de servicio son las que no requieren un ancho de banda constante, como por ejemplo la transmisión de datos. El tráfico de datos suele ser a ráfagas, es decir, requiere altas velocidades durante cortos intervalos de tiempo. El servicio VBR queda definido por dos parámetros: ● La tasa máxima de transmisión de celdas PCR. Este parámetro es idéntico al definido en el servicio ATM CBR. ● La tasa media de transmisión de celdas SCR (Sustained Cell Rate). También se mide en celdas por segundo y es el número de celdas que, en valor medio, puede transmitir el usuario. El usuario puede transmitir ráfagas a la velocidad máxima PCR, pero luego debe estar inactivo durante otros periodos. En media, la velocidad no puede ser superior a SCR. Gracias al uso del servicio VBR las aplicaciones con tráfico a ráfagas pueden obtener conexiones más económicas que si realizaran estas con CBR. ● AAL-3. Para este tipo de servicio que suministra el nivel de adaptación ATM, las aplicaciones que mejor se adaptan son aquellas que requieren una velocidad de transmisión variable, no son dependientes del retardo y ser orientadas a conexión. Actualmente existen redes ATM que utilizan este servicio para soportar Frame Relay. ●AAL-4. Está diseñado para el transporte de datos a una velocidad variable independientemente del tráfico y en modo sin conexión, es decir, tiene la capacidad de transferencia de datos sin el establecimiento previo de una conexión con el extremo remoto. Provee comunicaciones punto a punto o multipunto y servicios como SMDS pueden adaptarse a este tipo. Funciones indispensables de este nivel de adaptación son adaptar el servicio a los requerimientos de ATM: en el emisor se combina en un único flujo de datos los diferentes tipos de información que le proporciona el usuario y lo segmenta en celdas de 48 bytes que posteriormente en destino se volverán a ensamblar. Los servicios que se han mencionado anteriormente pueden ser configurados por el usuario en cada comunicación permitiendo adaptar la red ATM a las necesidades que tenga el usuario en cada momento. De esta forma, la red ATM está dotada de flexibilidad para poder implementar sobre ella un número ilimitado de aplicaciones. La tabla de la Figura 3.14 resume los diferentes servicios que ofrece el nivel de adaptación de ATM Servicios del nivel adaptación Clase de servicio RDSI-BA 29 AAL-1 (A) AAL-2 (B) AAL-3 (C) AAL-4 (D) ● Nivel ATM. El nivel ATM es el responsable de añadir el campo de cabecera para establecer los mecanismos de encaminamiento, control de flujo y de corrección de errores. Recogida en las recomendaciones 1. 150 e 1.361. Añade a los 48 bytes de información de usuario la cabecera de 5 bytes con la información de protocolo, necesaria para que la celda se encamine por la red ATM y llegue a su destino. La cabecera está dividida en los campos GFC, VPI, VCI, PT, CLP y HEC. Existe una pequeña diferencia del tamaño en bits de cada campo si se trata de una celda UNI (User Node Interface) (bien de una celda NNI (Network Node Interface). En los servicios orientados a conexión se necesita establecer un enlace entre el origen y el destino antes de poder enviar cualquier tipo de información de usuario. ATM ofrece (Figura 5.15) dos tipos de conexión de transporte: caminos virtuales (VP) y canales virtuales (VC). Figura 3.15. Circuitos y canales virtuales en ATM. Un camino virtual es una asociación lógica unidireccional o un conjunto de canales virtuales. Un canal virtual es un canal de comunicaciones que ofrece un transporte unidireccional y secuencial de celdas ATM. En resumen, pueden existir varios canales virtuales por camino virtual y varios caminos virtuales por cada canal físico. Los campos VPI (Virtual Path Identifier o Identificador de Camino Virtual) y VCI (Virtual Channel Identifier o Identificador de Canal Virtual) tienen como misión contener los números de identificación de camino o de canal de forma que se puedan distinguir las celdas que pertenecen a diferentes canales lógicos dentro de un mismo enlace físico. 30 ● Nivel de transporte. El nivel de transporte físico, que consta de dos subniveles: "Convergencia de Transmisión, se encarga de los aspectos independientes del medio de transmisión empleado y "nivel medio físico, que establece las características del medio físico a emplear y el tipo de transmisión (cable coaxial o fibra óptica, codificación y decodificación de línea, inserción y extracción de información de temporización, etc.) Los conmutadores ATM únicamente disponen de los niveles Físico y ATM, encargándose este último de que las celdas se dirijan por el camino adecuado 3.4.3. Las redes y servicios ATM Las redes ATM están orientadas a conexión, por lo que antes de empezar cualquier transmisión de información se ha de proceder al establecimiento del enlace. Los dos identificadores en la cabecera de la célula (VPI y VCI) permiten distinguir dos tipos distintos de conexión; el campo VPI (VirtualPath Identifíer) identifica un trayecto virtual, y el VCI (Virtual Cliannel Identifier) un canal virtual, pudiendo existir varios VC por VP y varios VP por cada canal físico. Las redes ATM se muestran adecuadas para tratar cualquier tipo de información en base a señales digitales. Las cinco capas de adaptación ATM (AALs) son las encargadas de adaptar el flujo de señales binarias generadas por los terminales para poder ser tratadas por los conmutadores ATM, segmentándolos en bloques de 48 bytes y reagrupándolos después. 31