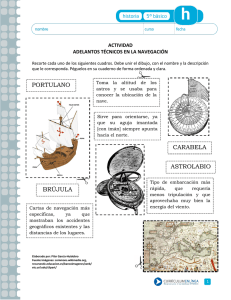
Los Sistemas de Posicionamiento por Satélite en la Navegación
Anuncio

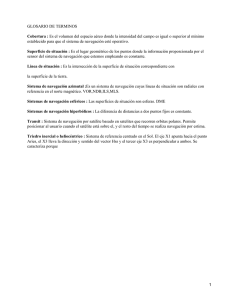
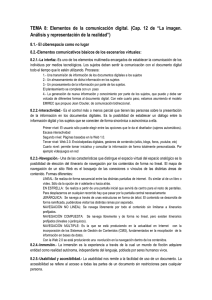
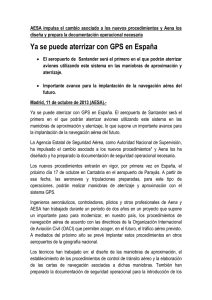
Los Sistemas de Posicionamiento por Satélite en la Navegación Aérea Dr. Luis Pérez Sanz Profesor Titular de Navegación y Circulación Aéreas Escuela Universitaria de Ingeniería Técnica Aeronáutica Departamento de Infraestructura, Sistemas Aeroespaciales y Aeropuertos Universidad Politécnica de Madrid (U.P.M.) Introducción La aparición de los sistemas de posicionamiento por satélite ha originado grandes expectativas en cuanto a los beneficios operacionales que éstos pueden ofrecer al Transporte Aéreo y en particular a la navegación aérea. En este texto se tratará de exponer cual ha sido el impacto que desde sus inicios, estos sistemas están tenido en la navegación aérea, analizándose también la situación actual y futura. La Navegación Aérea. Vuelos VFR e IFR. No es fácil encontrar una definición común al concepto de navegación aérea. Consultando distinta bibliografía se pueden encontrar casi tantas definiciones como autores, por lo tanto no se pretende en estas líneas ofrecer una definición más, sino por el contrario, intentar exponer las actividades que podrían constituir la navegación aérea. La navegación en cualquiera de sus versiones, terrestre, marina o aérea tiene una característica común, es necesario considerar un punto origen y otro destino, para con ellos definir la ruta que debe seguirse de uno a otro. La definición de esos puntos y la ruta que los une son sin duda actividades que formarían parte de la navegación, pero por supuesto que no son las únicas, es necesario además determinar la posición del móvil, para que al compararse con la ruta deseada, se puedan realizar las acciones de guiado sobre el vehículo para que siga esa ruta. En los comienzos de la aviación todos los vuelos requerían poder observar el exterior para realizar la navegación (determinar la posición del móvil), hecho por el cual, cuando la meteorología era adversa, el vuelo debía ser cancelado. La necesidad de conseguir una regularidad en las operaciones aéreas hizo que se desarrollasen los medios técnicos y operacionales de la navegación, llegándose a definir lo que hoy se conoce como vuelos VFR e IFR. Los vuelos VFR (Visual Flight Rules) son aquellos que se realizan bajo las Reglas de Vuelo Visual es decir, es necesario observar el exterior para poder navegar y evitar los obstáculos y a otras aeronaves. Esta necesidad solo puede ser cubierta cuando las condiciones meteorológicas lo permiten. A estos efectos se han definido unos parámetros que sirven para determinar cuando es factible realizar un vuelo VFR. Cuando la meteorología existente permite garantizar los mínimos de separación a las nubes y de visibilidad se dice que existen condiciones VMC (Visual Meteorological Conditions). En estas condiciones se podrán desarrollar vuelos VFR. Por el contrario, si las condiciones meteorológicas que se presentan no hacen posible la separación de las nubes ni se dispone de la visibilidad requerida, se dice que las condiciones son IMC (Instrumental Meteorological Conditions) y en ellas no se podrán realizar vuelos VFR, siendo por lo tanto obligatorio el vuelo IFR. El poder operar cuando la meteorología no es suficientemente buena requerirá de unos medios técnicos y operacionales adicionales respecto a los de los vuelos VFR. Estos requerimientos se refieren tanto a la parte aire, es decir aeronave y tripulación, como a la parte externa a la aeronave, aeropuerto e infraestructura terrestre y/o espacial. La aeronave debe llevar a bordo el equipo de navegación necesario para el vuelo que vaya a realizar, además la tripulación deberá estar en posesión de la calificación IFR. En cuanto a la parte terrestre, deberá existir una infraestructura adecuada, que consistirá en una red de radioayudas para la fase de vuelo en ruta y de un aeropuerto dotado con ciertos sistemas (radioayudas, sistemas de iluminación, etc.) para las fases de aproximación y aterrizaje. Es importante resaltar que un vuelo IFR requerirá que el conjunto aeronave y espacio aéreo/aeropuerto en el que se desenvuelve debe cumplir con los requisitos que a ese efecto se establezcan. Sistemas de Posicionamiento Según se ha indicado una actividad fundamental en la navegación aérea es la determinación de la posición de la aeronave. Cuando la meteorología o la altura de vuelo no permiten identificar visualmente accidentes geográficos o puntos singulares del terreno es necesario disponer a bordo de sistemas que permitan obtener la posición buscada, habiéndose llamado a éstos, “de ayuda a la navegación”. No todos los sistemas de ayuda a la navegación proporcionan la misma información, casi todos ellos materializan una línea de situación1, la cual puede ser bien distinta dependiendo del sistema, así han existido sistemas hiperbólicos, esféricos y acimutales. Con estos sistemas se puede determinar 1 Línea de situación: Lugar geométrico de los puntos que cumplen con el valor de la medida realizada: diferencia de fases, diferencia de tiempos, etc. el punto en el que la aeronave se encuentra mediante la intersección de dos o más líneas de situación. En los inicios de los años 80 se comienza a escuchar el término “Sistema de Posicionamiento Global”. Estos sistemas de cobertura mundial, sirven para determinar la posición de un punto mediante intersección de líneas de situación esféricas. Esta posición tratada adecuadamente puede ser utilizada en múltiples campos. Resumiendo lo hasta ahora expresado, son necesarios sistemas que permitan a la aeronave determinar su posición cuando la meteorología no es la adecuada o cuando el vuelo se desarrolla a altura y/o velocidad no adecuadas para determinar la posición por simple referencia visual exterior. Los sistemas que se utilizan para este fin se denominan de ayuda a la navegación y se pueden clasificar de diversas formas según el criterio que se utilice para ello. Un criterio de clasificación interesante es la ubicación de los sistemas, en este sentido se podrían hacer dos grandes grupos. Por un lado se encontrarán los autónomos que son aquellos que están íntegramente ubicados en el interior de la aeronave y por otro, los que requieren una fuente de información exterior a ella. Dentro de éstos se podrían clasificar a su vez en terrestres y en espaciales. Los terrestres incluyen aquellos que la transmisión de la señal de navegación es realizada desde estaciones fijas en tierra y las espaciales incluyen a los que la fuente de información está en el espacio. Los primeros sistemas espaciales de posicionamiento En la sección anterior se mencionó que en los años 80 se comenzó a extender la utilización del término sistema de posicionamiento global, ello fue debido a la aparición de unos sistemas que según la clasificación descrita se denominarían espaciales. Los dos primeros sistemas espaciales fueron el GPS (Global Positioning System) y el GLONASS (Global Navigation Satellite System). Puesto que este texto solo pretende mostrar el proceso de introducción de estos sistemas en la navegación aérea, no se expondrán sus características técnicas, por el contrario solo se relacionarán algunos datos de interés para el fin que se pretende. GPS: Sistema mundial de determinación de la posición explotado por los Estados Unidos de América Primer satélite del Bloque I lanzado en febrero del 78. Initial Operational Capability (IOC): Diciembre 93. Full Operational Capability (FOC): Abril 95. GLONASS: Sistema de Navegación por Satélite explotado por la Federación Rusa. Primer satélite lanzado en Octubre del 82. Actualmente la constelación no está completa (14 satélites en operación en Mayo de 2006) Según lo anterior, será desde finales de los 70/comienzo de los 80 el inicio de un cambio conceptual en los sistemas de ayuda a la navegación. Comité FANS (Future Air navigation System) Coetáneamente, a comienzo de los años 80 la aviación civil reconoce las limitaciones crecientes de los sistemas CNS/ATM2 del momento. En 1983 la OACI estableció un comité especial con el objetivo de identificar los futuros sistemas de CNS/ATM que permitiesen afrontar con garantías la aviación del siglo 21. Este comité se denominó “FANS: Special Committee on Future Air Navigation Systems”. En 1988, el Comité FANS concluyó que la utilización de la tecnología basada en satélite era la única solución viable de afrontar las limitaciones que existían entonces y las que se presentarían en el futuro. Este comité recomendó un nuevo concepto acerca de: Comunicaciones, Navegación, Vigilancia y Gestión del Tránsito Aéreo (CNS/ATM). En 1991, el nuevo concepto CNS/ATM fue recomendado por la 10ª Conferencia de Navegación Aérea. La 29ª sesión de la Asamblea de OACI adoptó el concepto desarrollado. En 1993, el Comité FANS completa la primera edición del Plan Global. “Global Coordinated Plan for Transition to the ICAO CNS/ATM Systems”. En 1998, OACI publica el documento “Global Air Navigation Plan for CNS/ATM Systems” siendo éste una versión mejorada del realizado en 1993. Necesidad de normalización del uso de los sistemas de posicionamiento por satélite Al inicio de la década de los 90 se vislumbra la inminente puesta en servicio de los sistemas de posicionamiento por satélite hasta ahora en desarrollo3. A mediados de los 90 se comienza a asimilar la capacidad que estos sistemas pueden llegar a ofrecer, no solo en el campo aeronáutico sino en otros muchos completamente distintos. En la navegación aérea se comienza a observar un aspecto inquietante, especialmente para las Autoridades Aeronáuticas y es que debido a las prestaciones en cuanto a exactitud que el GPS ofrece, su facilidad de uso y lo más importante, el precio de los receptores, hacen que su utilización, en particular por la aviación general, se extienda rápidamente originándose la 2 3 CNS/ATM: Communication, Navigation & Surveillance/Air Traffic Management Estas fechas corresponden al Sistema GPS el cual siempre ha ido por delante de GLONASS. necesidad de normalizar su utilización, explicando ampliamente funcionamiento y lo que es más importante, sus limitaciones. su La OACI junto con otras organizaciones ponen en marcha los grupos de trabajo necesarios para la normalización del uso de los sistemas de posicionamiento por satélite, definiéndose así un nuevo término, el GNSS. Estas siglas corresponden a las palabras Global Navigation Satellite System, solución propuesta por la OACI para nombrar a cualquier sistema de navegación por satélite, es decir tanto el GPS como el GLONASS se integrarían dentro de este nombre más genérico. Fases de Vuelo En la década de los 90, aunque se comenzase a utilizar el término GNSS, detrás de él todas las personas conocían que existía solo un sistema dispuesto para su utilización, el GPS; y otro que aún estaba en vías de desarrollo 4 . Debido a ello muchas veces se intercambian los términos GPS y GNSS. Como se ha indicado en la sección anterior, la utilización del GPS se comienza a extender de forma rápida, en algunos casos se utiliza como sistema complementario en vuelos VFR, sin embargo se comienza a detectar su utilización no solo en estos vuelos y además de forma no regularizada. Por otro lado, el anuncio dado por el servicio de Guardacostas de Estados Unidos de que el 30 de septiembre de 1997 el sistema OMEGA quedaría fuera de servicio, “dispara” las alarmas de diversas compañías aéreas, las cuales utilizaban este sistema para hacer los vuelos oceánicos o los denominados remotos (zonas donde las radioayudas terrestres no ofrecen cobertura). Con este anuncio, estas compañías no dispondrían de sistema alternativo de navegación, pues muchas de sus aeronaves no disponían de sistema Inercial. En esas fechas, mediados de los 90, la FAA normaliza el uso del GPS en zonas oceánicas/remotas. De forma similar la JAA edita una TGL (Temporary Guidance Leaflet) la cual tiene la misma finalidad que la correspondiente de la FAA. Con esta TGL, en España la Dirección General de Aviación Civil edita su Circular Operativa 2/97 la cual normalizaría la utilización del GPS como medio suplementario de navegación en áreas oceánicas/remotas. ¿Medio Suplementario de Navegación?. Hasta estos momentos, este término no existía. ¿Cual era su significado?. Los sistemas de ayuda a la navegación utilizados hasta esos momentos eran básicamente los terrestres, NDB; VOR, DME, ILS y en alguna fase de vuelo el sistema Inercial. A todos ellos se les exige unas prestaciones operacionales Exactitud, Disponibilidad, Continuidad del servicio e Integridad. Estos sistemas los cumplían para las fases de vuelo en los que serían utilizados. Sin embargo 4 A la fecha de 4 de Mayo de 2006 la constelación del sistema GLONASS dispone de 14 satélites operativos. el GPS, sistema de finalidad militar y especificado para tal fin, no cumple todas las prestaciones operacionales exigibles a un sistema de ayuda a la navegación civil por lo que su utilización debe hacerse con ciertas precauciones. De esa situación surgen las definiciones de sistemas de navegación como Medio Único, Medio Suplementario y Medio Primario. El sistema de ayuda a la navegación como Medio Único satisface por si mismo las prestaciones operacionales exigibles en la fase de vuelo en la que va a ser utilizado. Dado que el GPS no cumplía con todas ellas hubo de normalizarse su utilización bajo alguna de las otras dos formas. Lo primero que se planteó fue normalizar su utilización como Medio Suplementario. Un sistema de navegación como medio suplementario es aquel que satisface Exactitud e Integridad, pero no disponibilidad ni continuidad del servicio para las fases de vuelo en las que vaya a utilizarse. Como solución a esta deficiencia se propone llevar a bordo un sistema de navegación certificado como medio único para la fase de vuelo en cuestión. Sin embargo con esta solución el problema aún no estaba resuelto. ¿Como podrían desarrollar sus vuelos las aeronaves que sin tener inercial (recuérdese que el Omega dejaría de estar en uso) tuviesen que hacer vuelos oceánicos/remotos?. La utilización como medio suplementario no era suficiente pues requería llevar a bordo otro sistema como medio único. La solución que se encontró, analizada la fuente del problema del GPS, fue definir una nueva clase, Medio de navegación Primario. Un medio primario de navegación se definiría como aquél que satisface exactitud e integridad y los otros dos parámetros se evaluarían con anterioridad al vuelo, es decir mediante un método normalizado se evaluaría el estado que la constelación GPS tendría durante el periodo de tiempo en que la aeronave solo dispondría del sistema GPS para navegar, es decir no tendría un medio único adicional. Si el resultado de la verificación previa al vuelo fuese positiva, el vuelo podría desarrollarse con el sistema GPS como medio primario de navegación, es decir sin llevar a bordo otro sistema certificado como medio único para esa fase de vuelo. Aterrizaje Aproximación Llegada (STAR) Ruta Salida (SID) Figura 1: Fases de Vuelo Despegue Utilización del GNSS en cualquier fase de vuelo El comité FANS concluyó que la utilización de la tecnología basada en satélite era la única solución viable para afrontar las limitaciones que existían entonces y las que se presentarían en el futuro. De ello surge la idea de la utilización del GNSS en cualquier fase de vuelo. Recordando que los sistemas GPS y GLONASS son de origen militar, al tratar de utilizarlos en cualquier fase de vuelo se comprueba que sus prestaciones no son suficientes por lo que se necesita incorporarlos ciertas mejoras de tal forma que se logren las exigidas en cada caso. La solución vino a llamarse “Aumentaciones”. Este término traducido del inglés “Augmentation” hace referencia a las soluciones técnicas que se propusieron para que los sistemas GPS y GLONASS pudieran ser utilizados en las distintas fases de vuelo. Así se distinguen tres clases de aumentaciones: • SBAS (Space Based Augmentation System): Sistema de aumentación basado en el espacio. En un sistema de amplia cobertura (Área Regional), por el cual el usuario recibe información de aumentación transmitida desde un satélite. El SBAS complementa las constelaciones principales de satélites “aumentando” la exactitud, integridad, continuidad y disponibilidad para la navegación, suministradas dentro de un área de servicio que ordinariamente abarca múltiples aeródromos. Las funciones del SBAS son las siguientes: • • • • Telemetría: proporcionar señal adicional de pseudodistancia con indicador de exactitud a partir de un satélite SBAS. Estado de los satélites GNSS: Determinar y transmitir el estado de funcionalidad de los satélites GNSS. Correcciones diferenciales básicas: Correcciones de efemérides y de reloj de los satélites GNSS (rápidas y a largo plazo) que han de aplicarse a las medidas de pseudodistancia. Correcciones diferenciales precisas: determinar y transmitir correcciones ionosféricas. El SBAS se pensó para ser un sistema a utilizar desde la fase de vuelo en ruta hasta aproximaciones de precisión de categoría I5 • GBAS (Ground Based Augmentation System): aumentación basado en estaciones terrestres. Sistema de En este sistema la información en cuanto a aumentación recibida por el usuario proviene directamente de un transmisor terrestre. 5 El diseño se realiza para alcanzar la CAT I, con posterioridad se comprueba que las prestaciones exigidas para esta categoría no se conseguirían con este sistema. El GBAS complementa las constelaciones principales de satélites “aumentando” la exactitud, integridad, continuidad y disponibilidad para la navegación, suministradas dentro de un área de servicio local. Las funciones del GBAS son las siguientes: • • • • • Proporcionar correcciones locales de pseudodistancia. Proporcionar datos relativos al GBAS. Proporcionar datos del tramo de la aproximación final. Proporcionar datos pronosticados de disponibilidad de fuente telemétrica; y Proporcionar vigilancia de la integridad de las fuentes telemétricas GNSS. El GBAS es un sistema cuyas prestaciones permitirían aproximaciones de precisión en cualquiera de sus categorías. • ABAS (Airborne Based Augmentation aumentación basado en la aeronave. System): realizar Sistema de En este sistema la información en cuanto a aumentación recibida por el usuario proviene directamente de la información disponible en la aeronave. El ABAS es una aumentación para proporcionar datos de navegación en las fase de vuelo en ruta. Investigaciones recientes van encaminadas a demostrar la viabilidad de su utilización hasta en diversos procedimientos de aproximación. Navegación Convencional y Navegación de Área (RNAV) En la navegación convencional las rutas o segmentos de los procedimientos sobrevuelan la vertical de las instalaciones que los definen. Esta situación hace que la capacidad en determinados sectores del espacio aéreo sea pequeña en comparación con la demanda existente. Para incrementar esta capacidad una de las soluciones es que el diseño de las rutas ATS fuese menos restrictivo es decir, salvar la necesidad de dirigirse hacia las estaciones. Se debería disponer de la posibilidad de diseñar rutas más directas, adaptándose a las necesidades operativas reales. Esta situación es facilitada por la navegación de área, usualmente conocida como RNAV. En la navegación de área, la aeronave puede volar en cualquier trayectoria marcada por puntos que a su vez, son fijados por las distintas radioayudas, no siendo necesario el sobrevuelo de las mismas. En la figura 2 se muestra una representación de rutas convencionales y una ruta RNAV Con carácter teórico la navegación de área podría realizarse utilizando distintos sensores, así podrá haber navegación de área VOR/DME, DME/DME, GNSS. Sin embargo cuando se intenta llevar a la práctica, pueden requerirse muchas estaciones terrestres en el caso del VOR/DME o DME/DME, especialmente si se pretenden diseñar procedimientos de aproximación o salida instrumental, en los cuales por encontrarse la aeronave a bajas altitudes, la posibilidad de recepción de las estaciones terrestres disminuye. Con esta situación se prevé que el GNSS con sus distintos elementos o configuraciones se convertirá en el principal sistema de ayuda a la navegación para facilitar este tipo de navegación. Ruta Convencional Ruta RNAV Figura 2: Navegación Convencional/Navegación de Área Estrategia de navegación para la CEAC La planificación de la implantación de las aplicaciones RNAV para los Estados de la CEAC6 es la que Eurocontrol presenta en su Estrategia de Navegación y que se incluye en la figura 3. Figura 3: Implantación de aplicaciones RNAV en la CEAC 6 CEAC: Conferencia Europea de Aviación Civil. Como hitos importantes en la implantación de la RNAV, se menciona que en Abril del 98 se puso en servicio la BRNAV7 por encima del nivel de vuelo 245 en los Estados de la CEAC. Actualmente se está en proceso de implantación de la PRNAV 8 en determinadas Áreas Terminales (TMA’s). En un futuro próximo se estará en disposición de implantar la RNP RNAV9, aplicación que presentará todos los beneficios de la RNAV en conjunción con la no dependencia de un sensor de navegación determinado. Para todas estas aplicaciones, el GNSS será sin duda alguna el elemento técnico clave del éxito. Racionalización de la infraestructura De forma similar, Eurocontrol también ofrece en su estrategia de navegación unas líneas generales en cuanto a la planificación del despliegue/retirada de la infraestructura de navegación para todas las fases de vuelo. Por supuesto las fechas son orientativas y deben utilizarse como declaración de intenciones que los Estados deben considerar al realizar sus planificaciones. Figura 4: Planificación despliegue/retirada de infraestructura Observando la figura 4 puede comprenderse la importancia que tendrán en el futuro de la navegación el sistema DME y los sistemas GNSS en sus distintas configuraciones. Se prevé el uso del DME en la navegación de área, especialmente en el área terminal por proporcionar exactitudes de ± 1 NM. Los sistemas GNSS serán utilizados en cualquier fase de vuelo 7 BRNAV: Navegación de área básica. Exactitud ± 5NM en el 95% del tiempo de vuelo PRNAV: Navegación de área de precisión. Exactitud ± 1NM en el 95% del tiempo de vuelo 9 RNP RNAV: Prestaciones de Navegación Requeridas (Required Navigation Performance) RNAV. Aplicación de navegación en la que no se especifica el sensor utilizado. 8 Procedimientos futuros en el espacio aéreo terminal Si la implantación de la navegación de área está suponiendo un cambio sustancial en la organización, diseño y gestión del espacio aéreo en general, donde realmente la situación será más notoria es en el Área Terminal, en el cual la gestión del tráfico es más complicada por estar las aeronaves en vuelo de evolución, es decir ascendiendo desde la fase inicial del despegue hasta incorporarse al vuelo en ruta o descendiendo desde ésta hasta la fase de aterrizaje. La situación que se prevé en cuanto a los procedimientos de vuelo en el TMA en los próximos años será la siguiente: Procedimientos de salida instrumental (SID’s): Con aplicación de la PRNAV Procedimientos de llegada instrumental (STAR’s): Con aplicación de la PRNAV Transiciones al Localizador (desde el punto de finalización de las llegadas hasta la aproximación intermedia o final): Con aplicación de la PRNAV (Véase figura 5). Procedimientos de aproximación instrumental: Convencionales, RNAV y RNP x RNAV, donde la x significa la exactitud requerida en millas náuticas. Figura 5: Transiciones al Localizador. Ejemplo En un futuro un poco más lejano se utilizará en todos ellos la aplicación RNPxRNAV con unos valores de exactitud inferiores a 0,3 es decir inferiores a ± 0,3 NM. En resumen, el futuro será: • • a corto plazo: la RNAV en sus distintas aplicaciones a medio y largo plazo: la RNP RNAV En estos momentos con el fin de normalizar conceptos relativos a la navegación de área se está desarrollando un nuevo concepto que es el de “Performance Based Navigation” (PBN) 10 dentro del mismo se incluyen la RNAV y la RNP, sin embargo debido a que el concepto aún está en desarrollo y por ello sujeto a modificaciones, no se desarrollará en este texto. Procedimientos de aproximación instrumental Previamente a la aparición del GNSS los procedimientos de aproximación se clasificaban en dos grupos, Precisión y No Precisión Los procedimientos de Precisión (PA) son los que disponen de guiado electrónico horizontal y vertical en la aproximación final. La aeronave vuela el procedimiento utilizando el concepto de Altitud de Decisión (DA), es decir cuando se llega a ese punto si no se han obtenido las referencias visuales exteriores se interrumpe la aproximación y se comienza la aproximación frustrada. La figura 6 muestra este concepto. Aproximación de Precisión Aproximación Frustrada DA/H OCA/H Aproximación Final RWY Figura 6: Aproximación de Precisión La aproximación de No Precisión (NPA) es aquella en la que solo existe guiado horizontal en la aproximación final, utilizándose por ello el concepto de mínima altitud de descenso (MDA). La aeronave sin guiado vertical desciende hasta esta altitud, continua en vuelo horizontal hasta el punto de aproximación frustrada, llegado al cual si el piloto no ha obtenido las referencias visuales exteriores se interrumpe la aproximación comenzándose la aproximación frustrada. La figura 7 muestra este concepto. 10 Performance Based Navigation: Este es un nuevo concepto promovido por la OACI para armonizar y clarificar el concepto de Prestaciones de Navegación Requerida (RNP) dentro de un escenario RNAV. Aproximación de No Precisión Aproximación Frustrada Aproximación Final MDA/H OCA/H RWY Figura 7: Aproximación de Precisión Con la aparición del GNSS se comenzaron a analizar las posibilidades de este sistema para soportar aproximaciones instrumentales. El sistema ofrecía guiado horizontal y vertical, sin embargo sus prestaciones operacionales no eran suficientes para que se pudiesen realizar con él aproximaciones de Precisión. Se decidió por ello incluir una nueva categoría de las aproximaciones la cual se denominaría en un principio procedimientos NPV (Non Precision Approach with Vertical Guidance), Aproximación de No Precisión con Guiado Vertical. Dado que esta denominación contenía conceptos opuestos (No precisión implica sin guiado vertical), se decidió sustituir el término NPV por el de APV (Approach Procedure with Vertical Guidance) Procedimiento de Aproximación con Guiado Vertical, término que se mantiene en la actualidad. En la figura 8 se muestra la nueva clasificación de los procedimientos de aproximación, si bien es cierto que en estos momentos se está trabajando mucho en este campo existiendo ciertos desacuerdos entre los expertos, por lo que la clasificación final puede ser algo diferente. Procedimiento de Aproximación No Precisión NPA Aproximación con guiado vertical APV-I ------- APV-II ------- PA-I Precisión Sistemas de Navegación Navegación de Area Convencional RNAV NDB VOR/DME VOR DME/DME LOC GNSS Básico Guiado lateral: Igual a NPA. PA-II PA-III ILS MLS ILS MLS ILS MLS Guiado Vertical: VNAV-Baro SBAS GBAS SBAS GBAS SBAS GBAS GBAS GBAS Figura 8: Aproximación de Precisión En la figura 8 se muestran las tres categorías NPA, APV y PA. Dentro de las APV existen dos tipos de procedimientos APV I y APV II, los cuales se refieren a distintas prestaciones operacionales, de forma similar a las categorías I, II y III de las de Precisión. En la misma figura se incluyen los sistemas que podrán soportar cada uno de los procedimientos, llamando la atención que si el futuro es la navegación de área, los procedimientos serán realizados utilizando algún elemento del GNSS. Nueva Terminología en las IAC’s La utilización del GNSS en los procedimientos de aproximación instrumental ha suscitado la necesidad de definir nuevos métodos y términos, en particular en lo relativo a la publicación de los valores de la OCA/H11 según el tipo de guiado disponible. En la figura 9 se muestra el método para publicar los valores de la OCA/H en un procedimiento convencional de no precisión. En la tabla inferior izquierda de la figura se muestra para las categorías de aeronave A, B, C y D el valor de la OCA/H que en el ejemplo es 2330/400 pies. Aproximación de No Precisión Aproximación Frustrada Aproximación Final MDA/H OCA/H RWY Figura 9: Publicación de la OCA/H en un NPA 11 OCA/H. Altitud/Altura de franqueamiento de obstáculos. Es la altitud o altura por debajo de la cual no se podrá continuar la aproximación en condiciones instrumentales. Actualmente, al disponerse de nuevos medios técnicos los cuales proporcionan también distintos niveles de prestaciones, se está trabajando para normalizar la publicación del valor de la OCA/H en un entorno RNAV según el tipo de guiado ofrecido en la aproximación. Según se muestra en la figura 10 se propone utilizar tres nuevas líneas12 en la tabla de la OCA/H. • LNAV (Lateral Navigation) corresponderían al valor de la OCA/H cuando solo existe guiado lateral. Dentro de esta clase existen a su vez dos subgrupos o Con perfil vertical volado manualmente, equivalente a un procedimiento de no precisión y utilizando el concepto de MDA/H descrito anteriormente. El guiado lateral sería ofrecido por GPS + RAIM13 o SBAS. o Con perfil vertical volado automáticamente. A efectos de diseño del procedimiento es un procedimiento de no precisión, con la diferencia de que se vuela bajo el concepto de DA en lugar de MDA. Los sistemas que pueden utilizarse para el guiado lateral son los mismos que en el caso anterior y para el guiado vertical se puede utilizar la información procedente el baroaltímetro. Como el procedimiento se vuela bajo el concepto DA debe aumentarse el valor de la OCA/H para considerar la pérdida de altura al iniciar la frustrada. • LNAV/VNAV (Lateral/Vertical navigation). Esta línea de la tabla correspondería a un procedimiento con prestaciones APV (existe guiado vertical). El procedimiento se calcula como APV, se vuela con concepto DA y los sensores que se utilizan para el guiado lateral son GPS+RAIM o SBAS y para guiado vertical la información barométrica. En Estado Unidos para el guiado vertical también se utiliza el SBAS. • LPV (Localizer Performance with vertical guidance). Es un procedimiento en el cual el guiado lateral tiene las mismas prestaciones que el proporcionado por el Localizador del ILS, siendo en este caso proporcionado por el SBAS. El perfil vertical se vuela automáticamente utilizando para ello la información obtenida del SBAS. Es un procedimiento con prestaciones APV volado con el concepto DA. 12 Esta propuesta está en estudio por lo que no se descarta que exista alguna modificación en el sentido de ampliar con alguna línea más. 13 RAIM: Receiver Autonomous Integrity Monitoring. Función del receptor para asegurar el cumplimiento de la integridad. En la IAC Volado como Performance MDA/DA LNAV con perfil vertical volado manual. LNAV LNAV con perfil vertical volado automático. Usa Baro como sensor MDA NPA MDA volado como DA LNAV/VNAV APV/Baro VNAV, perfil vertical automático. Altura barométrica como sensor en el FMS APV DA LPV APV/SBAS con perfil vertical automático. Altura geométrica como sensor. APV DA Sistemas LNAV GNSS (GPS + RAIM o SBAS) Sistemas VNAV N/A Baro as Advisory GNSS Baro o (GPS + RAIM SBAS (USA) o SBAS) GNSS (SBAS) GNSS (SBAS) Figura 10: Significado de las nuevas líneas en las cartas de aproximación Un ejemplo de aplicación de esta nueva forma de publicar los valores de la OCA/H se muestra en la figura 11. Esta carta corresponde a un procedimiento con prestaciones APV utilizando como sensor de guiado lateral el GNSS o el DME/DME y como guiado vertical la información de altimetría barométrica. Este procedimiento fue realizado dentro del 5º Programa Marco de la Comisión Europea en el proyecto denominado APPROVE. Aproximación de Precisión APV Aproximación Frustrada DA/H OCA/H Aproximación Final RWY Figura 11: Proyecto APPROVE. AD Sevilla, Procedimiento APV Conclusiones A lo largo de este texto se ha querido resaltar como la aparición de los sistemas de posicionamiento por satélite está modificando el concepto de los procedimientos de navegación aérea. Desde sus inicios, en los que no se tenía experiencia en la utilización de los mismos, hasta el momento actual en el que habiéndose aprendido muchísimo se es consciente del largo camino que queda por recorrer. Durante este tiempo se ha avanzado principalmente en la mejora de las prestaciones de las constelaciones básicas, lanzando satélites de nueva generación los cuales cubren parte de las deficiencias de sus predecesores. Se ha lanzado un nuevo proyecto de sistema de posicionamiento global, el Galileo. En la especificación de este sistema se ha utilizado la experiencia adquirida con los sistemas GPS y GLONASS proporcionando soluciones a sus limitaciones y principalmente identificando los servicios que los usuarios necesitan. El sistema Galileo está en fase de despliegue, habiéndose puesto en órbita con éxito en estos momentos el primer satélite, el cuál formará parte de la constelación final. Por otro lado, se han desarrollado las especificaciones técnicas y operacionales de la aumentación SBAS, siendo al día de hoy sistemas disponibles, entre ellos el EGNOS (Sistema Europeo) y el WAAS (Sistema Americano). La aumentación GBAS aunque también se ha desarrollado en gran medida, aún no ha sido certificada para las aproximaciones de precisión de categoría I; no obstante se espera que en breve tiempo se consiga este hito. Las categorías II y III deberán esperar aún algunos años hasta verse implantadas. La utilización de estos sistemas en la navegación aérea no ha hecho más que empezar. Se está en la fase de adquisición de experiencia, que por otro lado es un aspecto esencial si la implantación quiere hacerse con seguridad. Como conclusión final cabe mencionar que en estos momentos no se está en disposición de fijar fechas en cuanto a retirada de los sistemas tradicionales o si todos ellos se retirarán, lo que no cabe duda es que los sistemas de posicionamiento por satélite jugarán un papel esencial en los futuros procedimientos de navegación aérea. Bibliografía • • AIP España Documentos de Trabajo del Grupo de Aproximaciones RNAV (RAFG RNAV Approaches Focus Group) Eurocontrol. • • • • • • • Performance Based Navigation Manual, Vol I & II. Draft Version 1.1 RNP Special Operational Requirements Study Group (RNPSORSG). OACI, February 2006. Anexo 6. Operación de Aeronaves. OACI. Operación de Aeronaves. PANS-OPS. Doc 8168. OACI Navigation Strategy for ECAC. NAV.ET1.ST16.001, Eurocontrol. Marzo 1999 Utilización del Sistema de Posicionamiento Global (GPS) como medio suplementario de navegación según las reglas del vuelo instrumental (IFR). Circular Operativa 01-97. 27 de Febrero de 1997. Dirección General de Aviación Civil. Proyecto “APPROVE”. 5º Programa Marco. Comisión Europea Websites: o ICAO.int o ecacnav.com o tycho.usno.navy.mil/gps o glonass-center.ru o navcen.uscg.gov/omega