Espacio de estados y búsqueda (1)
Dibujo de Vlad Guzner publicado en The New York Times Review, EEUU
Según Rich & Knight (1991), la solución de problemas
en IA se aborda en tres fases:
1) Definición del problema, e.g. situación inicial y final.
2) Análisis del problema y representación del
conocimiento.
búsqueda (1)
espacio de estados
y búsqueda
3) Elección y aplicación de una técnica de solución de
problemas.
2
Espacio de estados y búsqueda (2)
Espacio de estados y búsqueda (3)
En la fase de definición del problema se identifican
tres componentes:
El conjunto de todas las posibles configuraciones
válidas es el espacio de estados del problema o
el espacio del problema.
1) Los estados del problema
El objetivo final es el estado al que se quiere llegar.
2) Los operadores
La solución del problema puede verse como la
búsqueda de un camino que lleve de un estado
inicial a un estado final del problema.
3) El objetivo o estado final
Los problemas de la IA tienen grandes espacios de
estados.
3
4
Espacio de estados y búsqueda (4)
Espacio de estados y búsqueda (5)
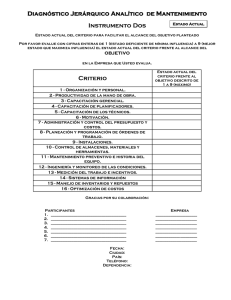
En la fase de análisis del problema, debe buscarse una
representación del problema para una computadora.
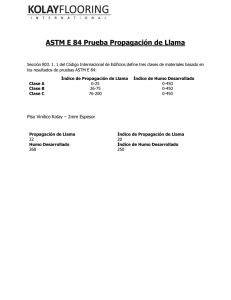
Rompecabezas (8-puzzle)
2
8
3
1
1
6
4
8
5
7
7
2
Los estados como los operadores de este problema pueden
representarse de diversas formas:
3
4
6
5
1-3
estado inicial
posiciones
posiciones
estado final
4-6
7-9
¿De qué tamaño es el espacio de estados de este
problema? 9!, es decir 362,880 estados.
3
1 2 3
8
4
7 6 5
2
1
1 2 3
8
4
7 6 5
1
edofinal([1,2,3,8,0,4,7,6,5]).
2
3
edofinal([2/2, 1/3, 2/3, 3/3, 3/2, 3/1, 2/1, 1/1, 1/2]).
5
6
Espacio de estados y búsqueda (6)
Espacio de estados y búsqueda (7)
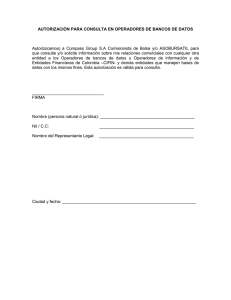
Los operadores que permiten pasar de un estado a
otro del problema, en el ejemplo del 8-puzzle son
los movimientos válidos de las celdas, e.g. el
movimiento de una celda contigua a la celda vacía
en una de cuatro direcciones, arriba, abajo,
izquierda y derecha.
La solución al rompecabezas puede verse como una
secuencia de movimientos de celdas, e.g. “mover
celda 6 hacia abajo”, “mover celda 8 hacia abajo”,
etc.
Los estados del problema al igual que los operadores
para transitar de un estado a otro se capturan en
esquema de representación de conocimiento, por
ejemplo con ayuda de un lenguaje de
programación tipo Prolog.
2
8
3
2
1
6
4
1
5
7
7
estado inicial
7
8
6
3
2
3
4
1
8
4
5
7
6
5
1
...
2
8
7
3
4
6
5
estado final
8
Espacio de estados y búsqueda (8)
Espacio de estados y búsqueda (9)
En la fase de elección de la técnica de solución de
problemas debe considerarse cuál de las técnicas de
búsqueda de soluciones debe aplicarse:
Técnicas de búsqueda con adversiarios: búsquedas
sistemáticas en espacio de estados para encontrar. el
siguiente estado apropiado o mejor, en un escenario
interactivo en donde participan dos entidades/jugadores.
Técnicas de búsqueda ciega o sin información:
búsquedas sistemáticas que recorren exhaustivamente el
espacio de estados para encontrar una ruta que lleve de
un estado inicial a uno final.
Técnicas evolutivas: búsquedas inspiradas en la
evolución, considera nociones como selección en una
“población” de individuos, reproducción y mutación. Los
individuos representan posibles soluciones al problema y
se prueban de forma simultánea, “compiten” entre ellos y
son evaluados con ayuda de una función de selección.
Técnicas de búsqueda heurística o con información:
búsquedas “guiadas” que recorren selectivamente el
espacio de estados para encontrar una ruta que lleve de
un estado inicial a uno final. Se basan en criterios de
“pesado” o evaluación para la guiar la búsqueda.
9
Espacio de estados y búsqueda (10)
10
Espacio de estados y búsqueda (11)
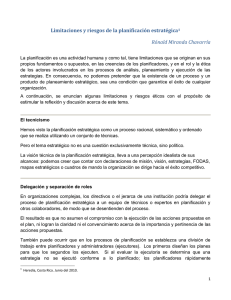
Consideraciones importantes para aplicar técnicas de
búsqueda, tanto ciegas como heurísticas
Búsqueda
básica
Los estados del problema y los
operadores de transicion entre
estados pueden caracterizarse
sin ambigüedad.
2 8 3
1 6 4
Búsqueda
heurística
7
2 8 3
1 6 4
7 5
5
2 8 3
1
4
2 8 3
1 6 4
7 5
7 6 5
2 8 3
6 4
1 7 5
!
11
...
...
...
...
Los estados del problema pueden
compararse en ambas búsquedas,
y pueden calificarse para guiar
una búsqueda heurística, con
base en conocimiento previo del
problema.
Debe considerarse el historial
de estados visitados. En muchas
aplicaciones no se visitan
estados ya visitados.
12
Planificación basada en campos potenciales (13)
Planificación basada en propagación (1)
Planificador deKoren & Borenstein (1991)
La familia de planificadores basados en propagación
(wavefront
based
planners)
basada en
idea propuesta
Nilsson
N.J.
(1980)está
Principles
ofuna
Artificial
Intelligence,
por J.C Latombe
y
su
grupo
(Hsu et al. 1999).
Morgan Kaufmann Pub.
Referencias
Espacio de estados y búsqueda (12)
Estas consideraciones
siempre
son aplicables
¿Cuáles
son los problemas no
de un
planificador
de este tipo?a todos
los problemas
IA: por
ejemplo
en problemas
de
¿Cuáles
situacionesde
pueden
resolverse
y cuáles
no?
robótica o de sistemas de apoyo médico.
EstosRich
planificadores
se basan
en la
E. & Knight
K. (1991)
hipótesis de expansividad del
espacio Hill.
de estados, consistente en
la posibilidad de “muestrear” de
manera uniforme el Cspace en
subconfiguraciones conectadas por
una línea recta o por una iteración
de tiempo n.
Considere por ejemplo el siguiente caso
!!!!!!"# !!!!!!!!!
!!!!!!"# !!!!!!!!$
!!!!!!"# !!!!$$$$$
!!!!!!"#
$$$%%%%%%&&
$$$$$$$$$$$$$%%%%&&
%%%%%%&&
%%%%%%%%%%&&
%%%%
&' %%%%%%%%%%&&
%%%%&&&' %%%%%%%%%%&&
El equilibrio de fuerzas
Presión arterial 120/80
repulsivas y atractivas
Glucosa en sangre 110
Colesterol HDL
120
debe ser cuidadosamente
Colesterol LDL
110
establecido. Las acciones
del robot podrían comprometerse Presión
en regiones
de paso
arterial 120/80
Glucosa
en sangre
200
obligatorio
en las
cuales
HDL
210
abundanColesterol
las fuerzas
Colesterol
LDL
150
repulsivas.
Artificial Intelligence, McGraw
Expansividad del Cspace, y secuencia de
conexiones entre p y q, tomado de Hsu et
al. (1999)
- 15 -
- 16 -
13
14
Planificación basada en propagación (2)
Planificación basada en propagación (3)
El funcionamiento de estos planificadores se resume a los
siguientes pasos:
La evaluación no es estática, aún cuando se hace sobre
un subespacio del Cspace, considera información global
del problema, muchas veces actualizada en tiempo de
ejecución.
(1) Muestrear el Cspace
(2) Evaluar el subespacio muestreado y seleccionar una
nueva posición del robot, de acuerdo con algún criterio
previamente determinado.
Estos planificadores son adecuados para un Cspace
representado en forma de rejilla de ocupación.
La evaluación del paso (2) debe permitir a un robot llegar al
estado final a partir de cualquier estado inicial, siguiendo
generalmente un gradiente, e.g. positivo para planificadores
basados en campos potenciales, o negativo para los basados
en propagación.
- 17 -
- 18 -
 0
0