Compensación en atraso por el método de respuesta en frecuencia
Anuncio

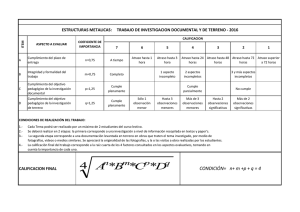
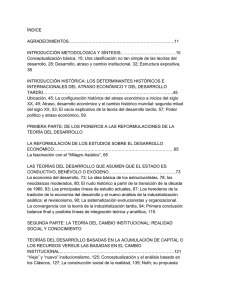
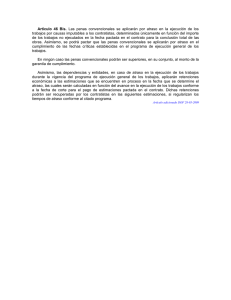
FIME COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Compensación en atraso por el método de respuesta en frecuencia CONTROL CLÁSICO 1 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Compensación en atraso por el método de respuesta en frecuencia Compensador electrónico en atraso con amplificadores operacionales 1 1 s+ R1C1 Ts + 1 T = Kc β = Kc 1 1 β Ts + 1 s+ s+ R2 C 2 βT R4 C1 β T = R2 C 2 T = R1C1 Kc = R3 C 2 R R RC β= 2 2 Kcβ = 2 4 R1 R3 R1C1 E 0 (s ) R2 R4 R1C1 s + 1 R4 C1 = = E i (s ) R1 R3 R2 C 2 s + 1 R3 C 2 s+ Ésta es una red de atraso si R1C1 < R2 C 2 . La ganancia del compensador en atraso es K c β El compensador tiene un cero en s = −1 T y un polo en s = −1 (βT ) . Dado que β > 1 , vemos que el cero siempre se ubica a la derecha del polo en el eje de frecuencia. El valor máximo de β está limitado por la construcción física del compensador de atraso 1 < β < 17. La función principal de un compensador de atraso es proporcionar una atenuación en el rango de las frecuencias altas a fin de aportar un margen de fase suficiente al sistema. CONTROL CLÁSICO 2 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Diagrama de Bode de un compensador en adelanto con K c = 1 y β = 10 ⎛ ⎜ s+ 1 1 T Gc (s ) = ⎜ β ⎜s+ 1 ⎜ βT ⎝ CONTROL CLÁSICO 3 ⎞ ⎟ ⎟ ⎟ ⎟ ⎠ M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Ejemplo 1 La función de transferencia de lazo abierto de un sistema de control es G (s ) = 4K s (s + 2 ) Se desea que el sistema cumpla con las siguientes especificaciones 1. El coeficiente estático de error de velocidad K v = 20 seg −1 2. El margen de fase MF ≥ 50° 3. El margen de ganancia MG ≥ 10 dB Solución El coeficiente estático de error de velocidad del sistema original K v = lim sG (s ) = lim s s →0 s →0 4K = 2K s (s + 2 ) Como se desea que K v = 20 seg −1 entonces 2 K = 20 K = 10 El sistema sería G (s ) = El margen de fase para este sistema es MF = 17.96° 40 s (s + 2 ) ω c = 6.17 rad / seg MG = ∞ El ángulo que debe de proporcionar el compensador en atraso φ m = −180° + MFesp + φ adic Se consideran 5° como grados adicionales φadic , si se piensa en ubicar el cero del compensador en atraso a una década antes del la nueva frecuencia de transición de ganancia ωm φ m = 180° + 50° + 5° = −125° en ω = 1.4 tenemos una defasamiento de -125° y una magnitud de 21.366 dB, ésta será la nueva frecuencia de transición de ganancia ω m = 1.4 CONTROL CLÁSICO 4 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL El compensador en atraso deberá proporcionar la ganancia de 21.366 dB 20 log β = 21.366 ⇒ β = 11.703 Se ubica al cero del compensador a una década antes de la nueva frecuencia de transición de ganancia El cero del compensador sería 1 ω m 1. 4 = = = 0.14 T 10 10 El polo 1 βT = 0.14 = 0.012 11.703 El compensador sería ⎛ 1 ⎜ s+ 1⎜ T Gc (s ) = β ⎜s+ 1 ⎜ βT ⎝ ⎞ ⎟ ⎟ = 1 ⎛⎜ s + 0.14 ⎞⎟ ⎟ 11.703 ⎝ s + 0.012 ⎠ ⎟ ⎠ El ángulo que aporta el compensador en atraso sobre la nueva frecuencia de transición de ganancia ω m = 1.4 es ω ω ∠Gc ( jω ) = tan −1 − tan −1 = 84.289° − 89.509° = −5.22° 0.14 0.012 El sistema compensado es ⎛ 40 ⎞⎛ s + 0.14 ⎞ 1 ⎟⎟⎜ G (s )Gc (s ) = ⎜⎜ ⎟ ⎝ s (s + 2 ) ⎠⎝ s + 0.012 ⎠ 11.703 Para el sistema compensado MF = 49.79° ω m = 1.4 rad / seg MG = ∞ CONTROL CLÁSICO 5 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME CONTROL CLÁSICO COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA 6 UANL M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Ejemplo 2 La función de transferencia de lazo abierto de un sistema de control es G (s ) = 24 K s (s + 2 )(s + 6 ) Se desea que el sistema cumpla con las siguientes especificaciones: El error en estado estable para una entrada rampa con pendiente 2π debe ser menor π o iguala 10 Un margen de fase MF ≥ 45° La frecuencia de cruce de ganancia ω c ≥ 1 rad seg Solución El coeficiente estático de error de velocidad del sistema original K v = lim sG (s ) = lim s s →0 Como se desea que e ss = π s →0 24 K = 2K s(s + 2 )(s + 6) entonces 10 R1 2π π π π = = por lo que entonces K = 10 e ss = = K 10 K v 2K K El sistema sería G (s ) = El margen de fase para este sistema es MF = −20.78° MG = −7.93 dB 240 s (s + 2)(s + 6) ω c = 5.3 rad / seg ω = 3.47 rad / seg El ángulo que debe de proporcionar el compensador en atraso φ m = −180° + MFesp + φ adic Se consideran 5° como grados adicionales φadic , si se piensa en ubicar el cero del compensador en atraso a una década antes del la nueva frecuencia de transición de ganancia ωm φ m = 180° + 45° + 5° = −130° CONTROL CLÁSICO 7 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL En ω = 1.13 tenemos una defasamiento de -130° y una magnitud de 23.604 dB, ésta será la nueva frecuencia de transición de ganancia ω m = 1.13 El compensador en atraso deberá proporcionar la ganancia de 23.604 dB 20 log β = 23.604 ⇒ β = 15.142 Se ubica al cero del compensador a una década antes de la nueva frecuencia de transición de ganancia ω m = 1.13 El cero del compensador sería 1 ω m 1.13 = = = 0.113 T 10 10 El polo 1 0.113 = = 0.0075 βT 15.142 El compensador sería ⎛ 1 ⎜ s+ 1⎜ T G c (s ) = β ⎜s+ 1 ⎜ βT ⎝ ⎞ ⎟ ⎟ = 1 ⎛⎜ s + 0.113 ⎞⎟ ⎟ 15.142 ⎝ s + 0.0075 ⎠ ⎟ ⎠ El ángulo que aporta el compensador en atraso sobre la nueva frecuencia de transición de ganancia ω m = 1.13 es ω ω ∠Gc ( jω ) = tan −1 − tan −1 = 84.289° − 89.62° = −5.33° 0.113 0.0075 El sistema compensado es ⎛ ⎞⎛ s + 0.113 ⎞ 1 240 ⎟⎟⎜ G (s )Gc (s ) = ⎜⎜ ⎟ ( )( ) s s + s + 2 6 ⎝ ⎠⎝ s + 0.0075 ⎠ 15.142 Para el sistema compensado MF = 44.54° MG = 15 dB CONTROL CLÁSICO ω m = 1.13 rad / seg ω f = 3.34 rad / seg 8 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME CONTROL CLÁSICO COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA 9 UANL M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Ejemplo 3 La función de transferencia de lazo abierto de un sistema de control es G (s ) = K s (s + 1)(s + 2) Se desea que el sistema cumpla con las siguientes especificaciones: El coeficiente estático de error de velocidad K v = 10 seg −1 Un margen de fase MF = 50° Un margen de ganancia de MG ≥ 10 dB Solución El coeficiente estático de error de velocidad del sistema original K v = lim sG (s ) = lim s s →0 s →0 K K = s (s + 1)(s + 2) 2 Como se desea que K v = 10 entonces K = 10 por lo que K = 20 2 El sistema sería G (s ) = 20 s (s + 1)(s + 2) El margen de fase para este sistema es ω c = 2.43 rad / seg MG = −10.51 dB ω f = 1.41 rad / seg MF = −28.17° El ángulo que debe de proporcionar el compensador en atraso φ m = −180° + MFesp + φ adic Se consideran 5° como grados adicionales φadic , si se piensa en ubicar el cero del compensador en atraso a una década antes del la nueva frecuencia de transición de ganancia ωm φ m = −180° + 50° + 5° = −125° En ω = 0.425 tenemos una defasamiento de (-125°) y una magnitud de 26.519 dB, ésta será la nueva frecuencia de transición de ganancia ω m = 0.425 CONTROL CLÁSICO 10 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL El compensador en atraso deberá proporcionar la ganancia de 26.519 dB 20 log β = 26.519 ⇒ β = 21.181 Como la β es mayor a 17 se utilizaran dos compensadores iguales, por lo tanto deberán ser 10 los grados adicionales (5° por compensador) φ m = −180° + 50° + 10° = −120° En ω = 0.36 tenemos una defasamiento de (-125°) y una magnitud de 28.206 dB, ésta será la nueva frecuencia de transición de ganancia ω m = 0.36 El compensador en atraso deberá proporcionar la ganancia de 28.206 dB 2 * 20 log β = 28.206 ⇒ β = 5.072 Se ubica al cero del compensador a una década antes de la nueva frecuencia de transición de ganancia ω m = 0.36 El cero del compensador sería 1 ω m 0.36 = = = 0.036 T 10 10 El polo 1 0.036 = = 0.0071 βT 5.072 El compensador sería ⎛ ⎜ ⎜1 Gc (s ) = ⎜ ⎜β ⎜ ⎝ 2 1⎞ ⎞ ⎛ ⎜s + ⎟ ⎟ 2 ⎛ 1 ( s + 0.036 ) ⎞ T⎠ ⎟ ⎝ ⎟ = ⎜⎜ 5.072 (s + 0.0071) ⎟⎟ ⎛ 1 ⎞⎟ ⎝ ⎠ ⎜⎜ s + ⎟⎟ ⎟ βT ⎠ ⎠ ⎝ El ángulo que aporta el compensador en atraso sobre la nueva frecuencia de transición de ganancia ω m = 0.36 es ω ω ⎞ ⎛ ∠Gc ( jω ) = 2⎜ tan −1 − tan −1 ⎟ = 2(84.289° − 88.87°) = 2(− 4.581°) = −9.162° ⎝ 0.036 0.0071 ⎠ El sistema compensado es ⎞⎛ (s + 0.036 ) 1 ⎞ ⎛ 20 ⎟⎟ ⎟⎟⎜⎜ G (s )Gc (s ) = ⎜⎜ ( )( ) 1 2 s s + s + ⎠⎝ (s + 0.0071) 5.072 ⎠ ⎝ CONTROL CLÁSICO 11 2 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Para el sistema compensado G ( jω )Gc ( jω ) ω =0.36 = 0.082 dB ∠G ( jω )Gc ( jω )ω =0.36 = −129.16° MF = 50.84° MG = 16.9 dB CONTROL CLÁSICO ω m = 0.36 rad / seg ω f = 1.35 rad / seg 12 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ.