TESIS DE MAESTRÍA EN CIENCIAS “Emulador de
Anuncio

Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingenierı́a Electrónica
TESIS DE MAESTRÍA EN CIENCIAS
“Emulador de Turbina Eólica para el Banco de
Pruebas de Generación Eoloeléctrica”
presentada por
Roberto II Ovando Domı́nguez
Ing. Electrónico por el I. T. de Veracruz
como requisito para la obtención del grado de:
Maestrı́a en Ciencias en Ingenierı́a Electrónica
Director de tesis:
Dr. Jesús Aguayo Alquicira
Co-Director de tesis:
Dra. Marı́a Cotorogea Pfeifer
Cuernavaca, Morelos, México.
Julio de 2007
Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingenierı́a Electrónica
TESIS DE MAESTRÍA EN CIENCIAS
“Emulador de Turbina Eólica para el Banco de
Pruebas de Generación Eoloeléctrica”
presentada por
Roberto II Ovando Domı́nguez
Ing. Electrónico por el I. T. de Veracruz
como requisito para la obtención del grado de:
Maestrı́a en Ciencias en Ingenierı́a Electrónica
Director de tesis:
Dr. Jesús Aguayo Alquicira
Co-Director de tesis:
Dra. Marı́a Cotorogea Pfeifer
Jurado:
Dr. Jorge Hugo Calleja Gjumlich - Presidente
Dr. Mario Ponce Silva - Secretario
Dr. Francisco V. Canales Abarca - Vocal
Dr. Jesús Aguayo Alquicira - Vocal Suplente
Cuernavaca, Morelos, México.
Julio de 2007
Dedicatoria
Dedico este trabajo:
A Dios, ya que siempre ha estado conmigo al momento de tomar las decisiones que hasta ahora han sido significativas en mi vida.
A mi padres Roberto y Paula, por el apoyo, el amor y los valores que toda la
vida me han dado de corazón; sin ustedes no hubiera sido posible alcanzar
todas las metas propuestas hasta ahora, espero seguir contando con ustedes
para las siguientes, los amo!
A mi hermano Asael por quererme y apoyarme a su modo tan peculiar, te
quiero mucho carnal!
A mis Abuelos: EulalioO , Isabel, Filiberto e Irene por sus sabios consejos.
A las familias Domı́nguez-Avalos, Ramı́rez-Domı́nguez, Gonzales-Domı́nguez,
Domı́nguez-Lagunes, Domı́nguez-Avendaño, Cuevas-Domı́nguez, Barra Ovando, Ciro-Zita, este logro va para todos ustedes, espero los motive a
continuar con la cosecha de éxitos profesionales.
A mi alma mater, Instituto Tecnológico de Veracruz.
Agradecimientos
Agradezco:
A Dios y a mis padres, porque siempre me dieron la fuerza necesaria para
continuar cuando parecı́a que abandonaba el camino.
A mi asesora la Dra. Marı́a Cotorogea por sus comentarios para mejorar
el trabajo de tesis y un agradecimiento muy especial al Dr. Jesús Aguayo
ya que gracias a su apoyo, confianza y perseverancia, el trabajo permitió
obtener más frutos de los esperados; gracias por confiar en mı́!
Al Dr. Gerardo Guerrero por confiarme las herramientas necesarias para
llevar a cabo la implementación de este trabajo de tesis y por los consejos
sugeridos durante el desarrollo del mismo.
A los miembros del comité revisor: Dr. Hugo Calleja, Dr. Francisco
Canales y al Dr. Mario Ponce por los valiosos comentarios que enriquecieron
este trabajo.
A mis profesores: Dr. Abraham Claudio, Dr. Carlos Aguilar, Dr. Jaime
Arau y al Dr. Marco Oliver.
A la Lic. Rosa O. Maquinay, M.I. Elia, Anita y Maira por que siempre me
atendieron de manera educada y atenta.
A Roberto Galindo, Marving Aguilar e Ivan Alcalá por dedicar parte de su
tiempo para ayudarme a aclarar dudas que surgieron durante el desarrollo
del trabajo.
A mis compañeros y a mis amigos: Paloma, Educado, Pachis, Pitta, Rose,
Matis, Frankie, Ansioso, Enrique, Abraham, Jerry, Uribe, Sorcia, Molina,
Vidal, Chaka, Chupis, Chino, Alegrı́a, Gracia, Cesarin, Innombrable, Backstreet, Sabor a mi, Botas, Jalapo, Pachiclon, Rata, Colombia, Barcenas,
Victor, Efren, Leobardo, Diego, Tuyui, Chocotorro, Beneindio, Oaxaco,
Dj, Max, Campeche, Cimazo, Dienton, La tigresa, Gustavo torp, jojojó,
Chikion, Mayito, Oscar, Mosco, Gato, Renata, Laura, Ale B, Karito, Pepe,
Carballo, Calaco, Chuy, Negro, por el compañerismo y su incomparable
amistad que me han brindado de manera desinteresada, gracias por soportarme!
A la Sra. Sara Paniagua y a Karito porque hacerme sentir como un miembro de su familia varios fines de semana durante mi estancia en Cuernavaca.
A todas las demás personas que eh dejado de mencionar y que sin duda
forman parte de mi vida.
Al CENIDET por permitirme crecer profesionalmente un poco más; y a todo
el personal que labora en el centro, por todas las finas atenciones prestadas
durante mi estancia.
Finalmente a CONACYT y a la DGEST por el apoyo económico que me
brindó para la realización del trabajo.
Emulador de Turbina Eólica para el Banco de
Pruebas de Generación Eoloeléctrica
Autor
Roberto II Ovando Domı́nguez
(RESUMEN)
La energı́a eléctrica ha sido el impulsor del desarrollo de la industria mundial en los últimos
doscientos años. Esta energı́a eléctrica ha sido generada comúnmente por medio de la
combustión de combustibles fósiles. Sin embargo, debido a que este tipo de generación es
contaminante, costosa y en algunos años será insuficiente; es necesario encontrar fuentes
alternativas de generación eléctrica, como la energı́a renovable.
Esta tesis presenta la implementación experimental de un emulador de turbina eólica
(WTE) para sistemas de generación eólica, usando un motor de CD de excitación separada
como el impulsor principal. El modelo de la turbina (parte dinámica y parte estática) y
el control del motor de CD se implementan en MATLAB/SIMULINK. El modelo de la
turbina eólica (WT) genera los valores de referencia de velocidad para impulsar el motor
de CD.
El desarrollo de un WTE permite que se estudien este tipo de sistemas sin la necesidad de turbinas eólicas reales. El banco de pruebas se compone por un motor de CD
acoplado con una máquina de inducción doblemente alimentada (MIDA). El motor de CD
con el control actúan como la WT y la MIDA actúa como el generador.
En este trabajo de tesis, se presentan los resultados experimentales obtenidos de
un prototipo de 300W , ası́ como los resultados en simulación en el paquete comercial
MATLAB del mismo sistema.
Wind Turbine Emulator for Wind Energy
Generation Test Bench
Autor
Roberto II Ovando Domı́nguez
(ABSTRACT)
The electric energy has been the booster of the development of the world-wide industry in
the last two hundred years. This electric energy has been commonly generated by means
of the combustion of fossil fuels. However, because this generation type is pollutant,
expensive and in some years it will be insufficient; it becomes necessary to find alternative
sources of electric generation, as the renewable energy.
This thesis presents the experimental implementation of a wind turbine emulator
(WTE) for wind generation systems, using a separately excited DC motor like the prime
mover. The model of the turbine (static and dynamic part) and the control of the DC
motor are implemented in MATLAB/SIMULINK. The model of the wind turbine (WT)
generates the reference values of speed to drive de DC motor.
The development of a WTE enables system studies to be undertaken without the
need for real turbines. The test bench it is composed by a DC motor coupled with a double
fed induction machine (DFIM). The DC motor with its control actuates as the WT and
the DFIM actuates as the generator.
In this thesis work, experimental results obtained from a 300W prototype, as well
as the simulation results in the comercial software MATLAB of the system itself are
presented.
Tabla de Contenido
Lista de figuras
v
Lista de tablas
vii
Notación
ix
1. Introducción
1
1.1
Prefacio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.2
Planteamiento del problema . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.3
Revisión del estado del arte . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.4
Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.4.1
Objetivo general . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.4.2
Objetivos particulares . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.5
Propuesta de solución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.6
Aportación y alcances del trabajo . . . . . . . . . . . . . . . . . . . . . . .
8
1.7
Organización del documento . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2. Sistema de generación de energı́a eólica
2.1
2.2
11
Perspectiva histórica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.1.1
Ventajas de la energı́a eólica . . . . . . . . . . . . . . . . . . . . . .
12
2.1.2
Inconvenientes de la energı́a eólica . . . . . . . . . . . . . . . . . . .
13
Estructura general de una turbina eólica . . . . . . . . . . . . . . . . . . .
13
2.2.1
15
Rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
i
2.2.2
Tren de impulsión . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.2.3
Generador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.2.4
Góndola y sistema de orientación . . . . . . . . . . . . . . . . . . .
17
2.2.5
Torre y cimentación . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
2.2.6
Controles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
2.3
Estructura del sistema implementado . . . . . . . . . . . . . . . . . . . . .
18
2.4
Principio de funcionamiento de una turbina eólica . . . . . . . . . . . . . .
20
3. Modelado del sistema y resultados de simulación
23
3.1
Introducción: modelado y simulación . . . . . . . . . . . . . . . . . . . . .
23
3.2
Tipos de modelos y conceptos de validación . . . . . . . . . . . . . . . . .
24
3.2.1
Modelos fı́sicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3.2.2
Modelos mentales . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
3.2.3
Modelos simbólicos . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
3.2.4
Conceptos de validación . . . . . . . . . . . . . . . . . . . . . . . .
26
Modelo de la turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
3.3.1
Modelo estático . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
3.3.2
Modelo dinámico . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
3.4
Condiciones de operación . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
3.5
Resultados de simulación . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
3.5.1
Simulación del modelo de la turbina eólica . . . . . . . . . . . . . .
33
3.5.2
Simulación del sistema completo . . . . . . . . . . . . . . . . . . . .
34
3.3
4. Implementación del emulador
39
4.1
Estructura del sistema emulador . . . . . . . . . . . . . . . . . . . . . . . .
40
4.2
Motor de CD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.2.1
Modelo del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
4.2.2
Control del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
4.3
Etapa de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
4.4
Plataforma DSC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
4.4.1
Selección de la plataforma DSC . . . . . . . . . . . . . . . . . . . .
49
4.4.2
Programación de la eZdspF2812 en MATLAB/SIMULINK . . . . .
51
4.4.3
Acondicionamiento de señales . . . . . . . . . . . . . . . . . . . . .
54
ii
5. Análisis de resultados
5.1 Perfil de viento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Resultados experimentales . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Desempeño del sistema emulador . . . . . . . . . . . . . . . . . . . . . . .
5.3.1
5.3.2
Índice de desempeño del sistema emulador . . . . . . . . . . . . . .
Desviación estándar del sistema emulador . . . . . . . . . . . . . .
6. Conclusiones y trabajos futuros
6.1
6.2
55
56
59
62
62
65
69
Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Trabajos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
71
Referencias
73
Anexos
77
A. Configuración del RTDX
77
B. Extras de la etapa de potencia
79
C. Guı́a de inicio rápido para la tarjeta eZdspF2812
81
C.1 Requerimientos de hardware . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2 Requerimientos de software . . . . . . . . . . . . . . . . . . . . . . . . . .
C.3 Configuración básica del SIMULINK . . . . . . . . . . . . . . . . . . . . .
iii
81
83
85
iv
Lista de figuras
1.1
Banco de pruebas desarrollado en [1]. . . . . . . . . . . . . . . . . . . . . .
2
1.2
Sistema desarrollado en la Universidad Tecnológica de Delft. . . . . . . . .
3
1.3
Sistema desarrollado en la Universidad Tecnológica de Chemnitz. . . . . .
4
1.4
Sistema desarrollado en la Universidad de New Brunswick. . . . . . . . . .
5
1.5
Sistema desarrollado en la Universidad de Magallanes.
. . . . . . . . . . .
6
1.6
Banco de pruebas para generación eoloeléctrica. . . . . . . . . . . . . . . .
7
2.1
Turbina eólica real. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
2.2
Configuraciones de los rotores HAWT. . . . . . . . . . . . . . . . . . . . .
14
2.3
Componentes principales de una HAWT. . . . . . . . . . . . . . . . . . . .
15
2.4
Diagrama de bloques del sistema de generación de energı́a eólica. . . . . . .
19
2.5
Fuerza de sustentación y fuerza de arrastre. . . . . . . . . . . . . . . . . .
21
3.1
Curva de potencia CP pλ, β q. . . . . . . . . . . . . . . . . . . . . . . . . . .
29
3.2
Modelo estático y dinámico implementado en MATLAB/SIMULINK. . . .
31
3.3
Vw , ωr , Tr y Tg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
3.4
Turbina eólica, MIDA, MSC y carga. . . . . . . . . . . . . . . . . . . . . .
34
3.5
Vw , ωr , Tr y Tg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
3.6
Paso de velocidad sub-sı́ncrona a super-sı́ncrona y viceversa. . . . . . . . .
37
4.1
Diagrama de bloques del sistema emulador. . . . . . . . . . . . . . . . . . .
40
4.2
Acoplamiento mecánico completo. . . . . . . . . . . . . . . . . . . . . . . .
42
4.3
Equivalente eléctrico de un motor de CD de excitación separada. . . . . . .
43
4.4
Esquema de control para el motor de CD. . . . . . . . . . . . . . . . . . .
45
4.5
Clasificación de los troceadores. . . . . . . . . . . . . . . . . . . . . . . . .
47
v
4.6
4.7
4.8
4.9
Convertidor troceador clase “A”. . . . . . . . . . . . . . . . . . . .
Plataforma eZdspF2812 de TI. . . . . . . . . . . . . . . . . . . . . .
Diagrama de flujo para implementación del modelo SIMULINK. . .
Implementación del modelo SIMULINK para la tarjeta eZdspF2812.
.
.
.
.
48
51
52
53
4.10 Diagrama esquemático para el acondicionamiento de señal. . . . . . . . . .
54
5.1
5.2
5.3
Perfil de viento real, La Venta (Enero-06). . . . . . . . . . . . . . . . . . .
Velocidad en el eje de alta velocidad (REALvsSIMULADA). . . . . . . . .
Acercamiento de la Figura 5.2. . . . . . . . . . . . . . . . . . . . . . . . . .
58
59
61
5.4
5.5
5.6
Operación del del sistema durante las transiciones . . . . . . . . . . . . . .
Índices de desempeño del sistema emulador . . . . . . . . . . . . . . . . . .
Acercamiento de la Figura 5.2 para el calculo de la desviación estándar. . .
62
64
66
B.1 Diagrama esquemático de los troceadores. . . . . . . . . . . . . . . . . . .
B.2 Troceadores implementados. . . . . . . . . . . . . . . . . . . . . . . . . . .
80
80
C.1 Contenidos del kit eZdspF2812. . . . . . . . . . . . . . . . . . . . . . . . .
C.2 Librerı́as que conforman el bloque Embedded Target for TI C2000 DSP. . .
C.3 Lista de tarjetas instaladas en el PC. . . . . . . . . . . . . . . . . . . . . .
82
84
85
vi
.
.
.
.
.
.
.
.
.
.
.
.
Lista de tablas
3.1
3.2
3.3
Parámetros de la turbina eólica. . . . . . . . . . . . . . . . . . . . . . . . .
Parámetros de la MIDA. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ganancias del control para la MIDA. . . . . . . . . . . . . . . . . . . . . .
32
35
37
4.1
4.2
4.3
Parámetros del motor de CD. . . . . . . . . . . . . . . . . . . . . . . . . .
Ganancias del control para el motor de CD. . . . . . . . . . . . . . . . . .
Comparación de las familias C2000 y C6000. . . . . . . . . . . . . . . . . .
44
45
50
5.1
Lugares que son evaluados por el IIE . . . . . . . . . . . . . . . . . . . . .
56
5.2
5.3
5.4
5.5
Arreglos de datos crudos adquiridos por el IIE . . . . . . . .
Índices de desempeño IAE e ITAE evaluados numéricamente
Desviación estándar para gráfica de la Figura 5.2 . . . . . .
Desviación estándar para gráfica de la Figura 5.6 . . . . . .
.
.
.
.
57
64
65
67
A.1 Listado para configurar la herramienta RTDX. . . . . . . . . . . . . . . . .
77
B.1 Listado de los dispositivos utilizados . . . . . . . . . . . . . . . . . . . . .
79
C.1 Tarjetas soportadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2 Version del software utilizado . . . . . . . . . . . . . . . . . . . . . . . . .
C.3 Complementos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
83
84
vii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
viii
Notación
Letras mayúsculas
Ar
Beq
Bg
Br
Área que cubre el rotor eólico
Coeficiente de amortiguamiento equivalente
Coeficiente de amortiguamiento del generador
Coeficiente de amortiguamiento del rotor
CO2
CM
CP
Hz
Jg
Dióxido de carbono
Coeficiente de par
Coeficiente de potencia
Ciclos por segundo, Hertz
Inercia del generador
Jr
Jre
Keq
Kg
Inercia del rotor
Inercia reflejada
Coeficiente de dureza equivalente
Coeficiente de dureza del generador
Kr
Lr
Ls
Coeficiente de dureza del rotor
Inductancia del rotor
Inductancia del estator
ix
Llr
Lls
Inductancia de dispersión del rotor
Inductancia de dispersión del estator
Lrm
Lsm
N
P
Pent
Inductancia de magnetización del rotor (trifásico)
Inductancia de magnetización del estator (trifásico)
Razón de la caja de engranajes
Número de polos de la máquina
Potencia de entrada
Pn
Pper
Rr
Rs
Potencia nominal de la turbina eólica
Pérdidas de potencia
Resistencia del rotor
Resistencia del estator
Tg
Tm
Tr
Tre
Par
Par
Par
Par
Va
Vc
Vn
Vrms
Vw
Velocidad de arranque de la turbina eólica
Velocidad de corte de la turbina eólica
Velocidad nominal de la turbina eólica
Tensión raı́z cuadrada media
Velocidad del viento
W
Y
Watts
Tipo de conexión de la MIDA
generador
mecánico
del rotor
del rotor reflejado
x
Letras minúsculas
c
c1 . .c6
Salida real
Coeficientes de potencia
e
ims
kW
m
error en un sistema
Corriente de magnetización estatórica
Kilo Watts
Metros
n
r
rpm
rr
s
Número de elementos de un vector
Salida deseada
Revoluciones por minuto
Radio del rotor
Desviación estándar
x
x̄
Elementos de un vector
Media aritmética
Letras griegas
β
Ángulo de inclinación de las palas
η
θg
θ9g
θr
Eficiencia de las máquinas eléctricas
Posición del eje del generador
Derivada de la posición del eje del generador
Posición del eje del rotor
θ9r
θre
θ9re
λ
ρ
σ
ωg
ω9 g
ωr
ω9 r
ωre
ω9 re
Derivada de la posición del eje del rotor
Posición del eje del rotor reflejada
Derivada de la posición del eje del rotor reflejada
Razón de velocidad de la punta de la pala al centro de la misma
Densidad del viento
Relación de inductancias
Velocidad en el eje de alta (generador)
Derivada de la velocidad en el eje de alta (generador)
Velocidad en el eje de baja (rotor)
Derivada de la velocidad en el eje de baja (rotor)
Velocidad en el eje de baja reflejada
Derivada de la velocidad en el eje de baja reflejada
xi
Acrónimos
ADC
CCS
CD
Convertidor analógico digital
Code Composer Studio
Corriente directa
CENIDET Centro Nacional de Investigación y Desarrollo Tecnológico
DFIM
Máquina de inducción doblemente alimentada
DSC
Controlador digital de señales
DSP
Procesador digital de señales
FPGA
GSC
HAWT
IAE
IIE
Field Programable Gate Array
Convertidor del lado de la red
Turbina eólica de eje horizontal
Integral absoluta del error
Instituto de Investigaciones Eléctricas
ITAE
MCC
MCD
MIDA
Integral del tiempo por el valor absoluto del error
Modo de conducción continuo
Modo de conducción discontinuo
Máquina de inducción doblemente alimentada
MSC
PI
PWM
RTDX
RTW
Convertidor del lado de la máquina
Control proporcional-integral
Modulador de ancho de pulso
Real-Time Data Exchange
Real-Time Workshop
TI
WTE
WT
Texas Instruments
Emulador de turbina eólica
Turbina eólica
xii
Capı́tulo
1
Introducción
1.1
Prefacio
El aprovechamiento de la energı́a eólica es una tecnologı́a que se encuentra en desarrollo y
se está utilizando ampliamente a nivel mundial, debido a la creciente demanda de energı́a
a la red eléctrica. Lo anterior lleva al estudio de la mejora continua de este tipo de
sistemas de generación con el fin de obtener el mayor aprovechamiento de ellos, de reducir
la contaminación y de disminuir la dependencia de los combustibles fósiles.
Para realizar investigación en sistemas de generación eólica en un lugar donde no se
cuenta con el recurso natural del viento, es necesario desarrollar un emulador de turbina
eólica (WTE). El desarrollo de un WTE permite realizar pruebas con perfiles de viento
reales ası́ como la validación experimental de otros trabajos relacionados con la generación
de energı́a eólica.
Por tanto, este trabajo de tesis describe detalladamente cada una de las etapas que
se desarrollaron para llevar a cabo la implementación del sistema WTE en el laboratorio
de máquinas eléctricas de CENIDET.
1.2
Planteamiento del problema
Para el uso masivo de los sistemas de generación eoloeléctrica es importante el estudio
de los sistemas conectados a red. Es deseable que el desarrollo y las pruebas de nuevas
tecnologı́as deban realizarse en un sistema aislado y por lo tanto, controlado. En un
1
2
CAPÍTULO 1. INTRODUCCIÓN
sistema aislado se puede verificar y optimizar la operación de los subsistemas antes de
realizar pruebas con conexión a la red principal.
De acuerdo a lo planteado anteriormente, en CENIDET surgió la necesidad de desarrollar este tipo de sistema para probar diferentes trabajos relacionados con el control
de máquina de inducción doblemente alimentada (MIDA), la cual forma parte del banco
de pruebas de generación eoloeléctrica.
De este modo en [1] se diseñó y construyó un banco de pruebas experimental para
ensayos de recuperación de energı́a en un sistema aislado. El banco está delimitado por
una MIDA de dos polos, especificada para operar con una tensión nominal de 42Vrms entre
terminales y su conexión es en estrella; forma parte del sistema de máquinas eléctricas del
fabricante DE LORENZO.
El banco de pruebas desarrollado no contaba con un emulador de turbina eólica, por
lo que manualmente se emulaba el comportamiento mediante el uso de una fuente variable
de CD. Este comportamiento tenı́a como desventaja que no manejaba perfiles de viento
reales ni se apegaba al funcionamiento real de una turbina.
Aunado a lo anterior, el sistema no tiene la posibilidad de conectarse a la red, debido a
que falta completar el banco de pruebas con un convertidor del lado de la red. Actualmente
en lugar del convertidor se tiene una fuente de CD. La Figura 1.1 presenta el banco de
pruebas desarrollado en [1].
Motor de
CD
r
Carga
resistiva
MIDA
Supersíncrono
Control
FOC
Fuente de
CD
Convertidor
puente completo
con IBGTs
Fuente de
CD
Subsíncrono
Figura 1.1: Banco de pruebas desarrollado en [1].
1.3. REVISIÓN DEL ESTADO DEL ARTE
1.3
3
Revisión del estado del arte
Existen varios grupos de trabajo dedicados a la investigación sobre la generación de energı́a
eólica entre los cuales destacan: la Universidad Tecnológica de Delft Holanda [2]-[3], Universidad Tecnológica de Chemnitz Alemania [4], Universidad de New Brunswick Canadá
[5]-[6] y la Universidad de Magallanes Chile [7].
Del mismo modo que el grupo de trabajo formado en CENIDET, los anteriores se
han visto en la necesidad de implementar diferentes tipos de emuladores de turbinas eólicas
para realizar investigación sobre este tipo de generación de energı́a.
En la literatura que se revisó se presentan las distintas formas de atacar el problema
y las suposiciones hechas por los diferentes grupos de investigación involucrados. Cabe
apuntar que los artı́culos presentados en esta sección son los de mayor provecho en cuanto
a la información extraı́da de cada uno de ellos.
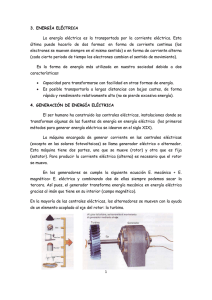
En la referencia [2] se presenta un modelo dinámico de una turbina eólica de velocidad variable con un generador doblemente alimentado y un convertidor back-to-back. El
devanado de estator del generador se acopla directamente a la red. El devanado de rotor se
conecta al convertidor back-to-back. El modelo incluye el control de velocidad, control de
grado de inclinación de las aspas, control de tensión en terminales e ignora la dureza y el
amortiguamiento de los ejes. Del sistema descrito anteriormente (Figura 1.2) se obtienen
las ecuaciones (3.2), (3.3) y (3.5) que describen el comportamiento estático de un rotor
eólico.
Máquina de inducción
doblemente
alimentada
Caja de
engranajes
ROTOR
CONVERTIDOR
Figura 1.2: Sistema desarrollado en la Universidad Tecnológica de Delft.
RED
4
CAPÍTULO 1. INTRODUCCIÓN
Como complemento de [2] en la referencia [3] se resuelve el problema de inicialización
de los sistemas de generación eólica para simulaciones y se describen tres tipos de estos
sistemas. Uno de los sistemas descritos en la referencia [3] es caso de estudio en este
trabajo de tesis y se desglosa en la sección 2.3.
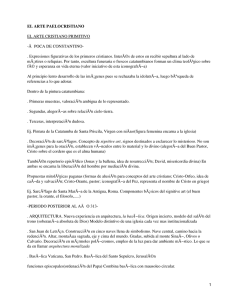
En [4] se presenta el modelo estático y dinámico de una turbina eólica, y su implementación. De esta referencia se obtienen las ecuaciones (3.1) y (3.5) para la parte
estática. Se sabe que el modelado de la parte dinámica incluye la inercia de la turbina y
del generador considerando ejes elásticos ası́ como una caja de engranajes.
Es muy valiosa la aportación de este trabajo en cuanto a la implementación se refiere.
Utiliza un motor de CD de excitación separada operando en su región nominal impulsado
mediante un rectificador trifásico controlado. El esquema de control consta de un lazo
interno de corriente y un lazo externo de velocidad, los controladores son tipo proporcionalintegral (PI). El sistema se implementa en una plataforma del tipo procesador digital de
señales (DSP) de Texas Instruments (TI). La Figura 1.3 presenta el sistema desarrollado
en la Universidad Tecnológica de Chemnitz.
ESTÁTICO
Cm
VW
DINÁMICO
0.5
0
0.4
0.3
ωT
MT
10
0.2
20
-
0.1
30
0
0
Sistema
de 3 masas
Impulsor para
motor de CD
40
5
10
15
Lambda
Md
Figura 1.3: Sistema desarrollado en la Universidad Tecnológica de Chemnitz.
En la referencia [5] se presenta un motor de inducción impulsado mediante un inversor
trifásico para obtener el comportamiento de una turbina eólica. Sólo se presentan algunas
ecuaciones estáticas del sistema, tales como (3.1), (3.5) y se enfatiza en el control empleado
para el motor de inducción que es de tipo PI. La implementación se realiza mediante LAB
Windows y emulan una turbina de 8.5kW , el sistema implementado se presenta en la
Figura 1.4.
1.3. REVISIÓN DEL ESTADO DEL ARTE
5
En [6] se hace énfasis en el algoritmo de control de maxima extracción de potencia,
el modelado estático es similar al de los artı́culos anteriores pero para la parte dinámica
se considera la inercia de la turbina despreciando la dureza y el amortiguamiento de los
ejes. Este modelo dinámico es similar al utilizado en la implementación experimental de
este trabajo de tesis, ecuación (3.12).
Fuente
trifásica
Simulador de viento
Perfil de
viento
Demanda de
corriente
Motor de
inducción
Generador
Demanda de
frecuencia
Inversor trifásico
con IGBT
Par
Velocidad
Figura 1.4: Sistema desarrollado en la Universidad de New Brunswick.
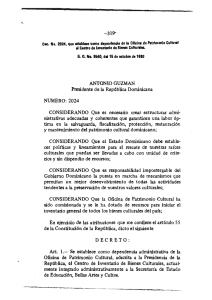
En la referencia [7] se presentan dos casos: la emulación de una turbina eólica y la de
una rueda volante, el primer caso es el de interés. Lo que se debe resaltar en este artı́culo
es el modelo dinámico ya que considera ambos ejes (turbina y generador); lo anterior es
útil para simular el sistema de generación completo.
En la implementación utilizan un motor de CD operado en su región nominal impulsado mediante un rectificador trifásico controlado. Utiliza un esquema de control con un
lazo interno de corriente y un lazo externo de velocidad, los controladores son tipo PI.
El prototipo se implementa en un sistema microprocesador y se comparan los resultados con simulaciones hechas en MATLAB/SIMULINK (Figura 1.5).
Un último documento que se considera fuertemente para el modelo dinámico del tren
de engranajes es la tesis [8] de donde se deduce la ecuación (3.11) que se utiliza para la
simulación del sistema de generación completo.
Otras fuentes de información importantes y que complementan el desarrollo de este
trabajo de tesis son las referencias básicas [9],[10].
6
CAPÍTULO 1. INTRODUCCIÓN
Sistema basado en microprocesador
Interfase
con cliente
Algoritmo
de control
PWM
Entrada
Salida
A/D y D/A
Tarjeta para
interfase de
velocidad
Control de
velocidad para
motor de CD
Tarjeta para
interfase PWM
D/A
A/D
Convertidor
ia ib E ILV1 V2
Va,Vb,Vc
3∅
ωr
ECD
Máquina de
CD
Máquina de
Inducción
Figura 1.5: Sistema desarrollado en la Universidad de Magallanes.
1.4
Objetivos
1.4.1
Objetivo general
Desarrollar un emulador de turbina eólica que permita reproducir el comportamiento de
una turbina ante perfiles de viento reales.
1.4.2
Objetivos particulares
1. Realizar la revisión del estado del arte mediante la cual se conozcan y analicen las
diferentes alternativas de solución en emuladores de turbinas eólicas.
2. Proponer una alternativa de solución mediante la cual se puedan satisfacer los requerimientos del sistema para el estudio de la recuperación de energı́a.
3. Realizar el análisis de la solución propuesta.
4. Validar experimentalmente la solución propuesta.
1.5. PROPUESTA DE SOLUCIÓN
1.5
7
Propuesta de solución
Se propone diseñar e implementar experimentalmente un emulador de turbina eólica con
un motor de corriente directa (CD) controlado a través de dos convertidores tipo troceador.
El emulador complementará el banco de pruebas para generación eléctrica existente basado
en la máquina de inducción doblemente alimentada (MIDA). El esquema del sistema propuesto se presenta en la Figura 1.6.
Emulador de turbina
Fuente de
CD
Pulsador
clase A
r
Motor de
CD
Carga
resistiva
DFIG
Control
Perfiles de
viento
Supersíncrono
Control
FOC
Modelo de
turbina
eólica
Convertidor
puente completo
con IBGTs
Fuente de
CD
Subsíncrono
Figura 1.6: Banco de pruebas para generación eoloeléctrica.
De acuerdo a lo que se revisó en la literatura se propuso la metodologı́a a seguir para
llevar a cabo el trabajo de tesis y se presenta a continuación:
1. Revisión del estado del arte.
2. Estudio del modelo del sistema mecánico.
3. Obtención de las mediciones anemométricas.
4. Estudio del funcionamiento y control del motor de CD.
5. Caracterización del motor de CD.
6. Acoplamiento mecánico del motor de CD con la MIDA.
7. Selección y diseño del propulsor para el motor de CD.
8. Estudio de la construcción y funcionamiento del banco de pruebas.
8
CAPÍTULO 1. INTRODUCCIÓN
9. Implementación del modelo de la turbina eólica al modelo existente del sistema
completo de generación eléctrica y simulaciones con diferentes perfiles de viento.
10. Estudio de la plataforma controlador digital de señales (DSC).
11. Implementación experimental del módulo emulador de turbina eólica en el banco de
pruebas actual.
12. Análisis de resultados y conclusiones.
1.6
Aportación y alcances del trabajo
El desarrollo de este trabajo tiene como aportación principal completar el banco de pruebas
existente en CENIDET, lo que permitirá realizar pruebas con perfiles de viento reales y
la validación experimental de otros trabajos de investigación.
El alcance del trabajo de tesis desarrollado se enlista en los siguientes puntos:
1.7
modelo de un sistema completo de generación eléctrica incluyendo el emulador de
turbina eólica en el software de simulación MATLAB/SIMULINK
ampliación del banco de pruebas experimental incluyendo un motor de CD de suficiente potencia, por lo menos el doble de la potencia nominal de la MIDA (300W )
la potencia total del sistema de generación queda limitada por la MIDA
se modela una turbina eólica de velocidad variable de eje horizontal (HAWT por sus
siglas en inglés Horizontal Axis Wind Turbine)
Organización del documento
Este documento está constituido por 6 capı́tulos, organizados de la siguiente manera:
En el Capı́tulo 2 se define cada una de las partes que conforman un sistema de
generación de energı́a eólica. Lo anterior dará una perspectiva general del sistema
completo y permitirá identificar cada una de las partes que se deberán modelar e
implementar para obtener un sistema emulador de turbina eólica.
1.7. ORGANIZACIÓN DEL DOCUMENTO
9
En el Capı́tulo 3 se describe detalladamente el modelo del sistema emulador de
turbina ası́ como el resultado de la simulación del mismo. También se presenta el
modelo y la simulación del sistema de generación de energı́a eólica (carga resistiva,
generador, convertidor del lado de la máquina, turbina eólica y el control respectivo).
En el Capı́tulo 4 se presenta el desarrollo que se lleva a cabo para implementar el
sistema emulador en el laboratorio, ası́ como cada una de las etapas que se requirieron
para el desarrollo del mismo.
En el Capı́tulo 5 se muestran y comentan los resultados experimentales del sistema
emulador de turbina llevados a cabo en el laboratorio de máquinas eléctricas.
En el Capı́tulo 6 se dan las conclusiones de la tesis y los trabajos futuros propuestos.
10
CAPÍTULO 1. INTRODUCCIÓN
Capı́tulo
2
Sistema de generación de energı́a eólica
2.1
Perspectiva histórica
La energı́a eólica se ha aprovechado desde tiempos muy remotos, tal vez desde el siglo
X, en aplicaciones tan variadas como propulsión de navı́os, molinos, sistemas de bombeo
de agua, etc. Sin embargo, el uso de la energı́a eólica para generar electricidad es más
reciente, apareciendo a finales del siglo XIX, cuando se diseñaban sistemas de operación
a velocidad variable produciendo corriente continua, utilizada para cargar baterı́as ó para
suministrar energı́a a lugares remotos y aislados.
Ya en la década de los 30’s, la corriente alterna se impuso sobre la corriente directa
como forma de distribución de energı́a. El uso de la corriente alterna originó el establecimiento de una normalización para definir la tensión y frecuencia de distribución. Una vez
que se fijó una frecuencia de distribución eléctrica, los sistemas de generación de energı́a
eólica fueron diseñados para operar a velocidad constante permitiendo su conexión directa
a la red principal.
Estos primeros sistemas de generación eran sencillos y bastante estables en su operación, sin embargo en casos de fallas simplemente eran desconectados de la red. Con el
aumento del número de los sistemas de generación eólicos conectados a la red, se tornó poco
práctica la desconexión ante fallas, forzando la búsqueda de nuevos diseños que lograran
estabilizar la red en caso de falla. Este panorama impulsó el desarrollo de nuevos sistemas
que permitieran mayor control [11].
11
12
CAPÍTULO 2. SISTEMA DE GENERACIÓN DE ENERGÍA EÓLICA
A mitad de los 70’s surgen los primeros sistemas de generación de energı́a eólica con
operación a velocidad variable produciendo tensión a frecuencia constante. Los sistemas
construidos presentan ciertas ventajas sobre los de velocidad constante, por ejemplo una
mayor generación eléctrica a mayor velocidad [11].
2.1.1
Ventajas de la energı́a eólica
Es una energı́a renovable, ya que no se gasta ó tarda poco tiempo en volver a regenerarse.
Es una energı́a limpia ya que no requiere una combustión que produzca dióxido de
carbono (CO2 ), y no produce emisiones atmosféricas ni residuos contaminantes.
Si bien no en todos los lugares puede ser utilizada como única fuente de energı́a
eléctrica, su inclusión en un sistema inter-conectado permite, cuando las condiciones
del viento son adecuadas, ahorrar combustible en las centrales térmicas ó agua en
los embalses de las centrales hidroeléctricas.
Puede colocarse en espacios no aptos para otros fines, por ejemplo en zonas desérticas,
próximas a la costa, en laderas áridas y muy empinadas para ser cultivables.
Dado que las turbinas eólicas actuales son de baja velocidad de rotación, el problema
de choque con las aves se está reduciendo.
Crea puestos de trabajo en las zonas en las que se construye y en las plantas de
ensamblaje.
La energı́a eólica es una fuerte alternativa al cambio climático ya que no produce
efecto invernadero.
Su utilización combinada con otros tipos de energı́a, habitualmente la solar, permiten
la auto-alimentación de viviendas, terminando ası́ con la necesidad de conectarse a
distintas redes de suministro [10]-[12].
2.2. ESTRUCTURA GENERAL DE UNA TURBINA EÓLICA
2.1.2
13
Inconvenientes de la energı́a eólica
A pesar de las ventajas señaladas anteriormente, la energı́a eólica está entrando en una
fase de fuerte cuestionamiento por parte de medios ecologistas que sostienen diferentes
razones:
Los lugares más apropiados para su instalación suelen coincidir con las rutas de las
aves migratorias, ó zonas donde las aves aprovechan vientos de ladera, lo que hace
que entren en conflicto las turbinas eólicas con aves y murciélagos. Afortunadamente
los niveles de mortandad son muy bajos en comparación con otras causas como
por ejemplo los atropellos. Sin embargo, expertos independientes aseguran que la
mortandad es alta.
Cuando se instalan en zonas elevadas ó montañosas, es necesario construir caminos
y realizar desmontes, destruyendo ası́ la vegetación natural y originando problemas
erosivos.
Necesita del apoyo de centrales movidas por otros tipos de energı́a para estabilizar
su producción, que sigue las rachas de viento y produce caos en la red de distribución
nacional. Este apoyo se necesita 24 horas al dı́a, y produce más gases invernaderos
al subir y bajar la producción de las centrales térmicas en cada minuto.
Producen el llamado efecto discoteca: este efecto aparece cuando el sol está por
detrás de las turbinas y las sombras de las aspas se proyectan con regularidad sobre
los jardines y las ventanas, parpadeando de tal modo que la gente denominó este
fenómeno: “efecto discoteca”. Esto, unido al ruido, puede llevar a la gente hasta un
alto nivel de estrés, con efectos de consideración para la salud [10]-[12].
2.2
Estructura general de una turbina eólica
Una turbina eólica es una máquina que convierte la energı́a del viento en electricidad. Ası́
como los generadores eléctricos, las turbinas eólicas se conectan a algunas redes eléctricas.
Estas redes abarcan circuitos para carga de baterı́as, sistemas de potencia residenciales,
sistemas aislados y extensas redes de servicio. Una turbina eólica tı́pica conectada a la
red se presenta en la Figura 2.1.
14
CAPÍTULO 2. SISTEMA DE GENERACIÓN DE ENERGÍA EÓLICA
Dirección del
Viento
Dirección del
Viento
Barlovento
Figura 2.1: Turbina eólica real.
Sotavento
Figura 2.2: Configuraciones de los rotores HAWT.
Para entender la operación de las turbinas eólicas es conveniente considerar brevemente algunos aspectos fundamentales de su operación. En las turbinas eólicas modernas,
el proceso de conversión utiliza la fuerza aerodinámica de sustentación para producir un
par neto positivo en un eje giratorio, resultando primeramente la producción de potencia
mecánica y posteriormente la transformación en electricidad mediante un generador.
Actualmente, el diseño más común de una turbina eólica, y el único discutido a
detalle en esta tesis, es la HAWT, donde el eje de rotación es paralelo al suelo. Los rotores
de las HAWT se clasifican comúnmente de acuerdo a la orientación del rotor (barlovento
ó sotavento), diseño de buje (rı́gido ó flexible), control del rotor (ángulo de inclinación
ó perdida de sustentación), número de palas (comúnmente dos ó tres palas), y como se
encuentran alineadas con el viento (orientación de curso libre ó activa). La Figura 2.2
muestra las configuraciones de los rotores HAWT de acuerdo a la orientación del rotor
(barlovento y sotavento) [9].
Los componentes principales de una HAWT tı́pica se presentan en la Figura 2.3 y se
enlistan en los siguientes puntos:
El rotor, que consiste en las palas y el buje que las soporta.
El tren de impulsión, está formado por las partes giratorias de la turbina eólica (exclusivas del rotor); tı́picamente formada por ejes, caja de engranajes, acoplamientos,
freno mecánico y el generador.
La góndola y el bastidor principal, alojan la turbina eólica y el sistema de orientación.
2.2. ESTRUCTURA GENERAL DE UNA TURBINA EÓLICA
15
La torre y la cimentación.
El control de la máquina.
La estabilización del sistema eléctrico, el cual comprende: cables, dispositivo de
regulación, transformadores y convertidores electrónicos de potencia.
Cubierta de la
góndola
Rotor
Control
Buje
Tren de
impulsión
Generador
Torre
Bastidor principal
Estabilización
del sistema
eléctrico
Cimentación
Figura 2.3: Componentes principales de una HAWT.
A continuación se presenta una breve introducción y un vistazo general de algunos
de los componentes más importantes. En las secciones posteriores se describe a detalle
cada uno de los componentes considerados para el desarrollo de esta tesis.
2.2.1
Rotor
El rotor está formado por el buje y las palas, y es considerado uno de los componentes
más importantes de una turbina eólica desde el punto de vista del desempeño y costo
total. La mayorı́a de las turbinas hoy en dı́a son de rotor a barlovento con tres palas. Hay
algunos rotores a sotavento y muy pocos diseños a dos palas. Las turbinas de una pala se
construı́an en el pasado y no se encuentran actualmente en producción. La mayorı́a de las
turbinas de tamaño intermedio, especialmente las de Dinamarca, han utilizado el control
por pérdida de sustentación y el ángulo de inclinación fijo.
Un número considerable de fabricantes en los Estados Unidos ha utilizado el control
por ángulo de inclinación y existe una tendencia que apunta hacia el incremento por el
uso del control por ángulo de inclinación, especialmente en turbinas grandes [9].
16
CAPÍTULO 2. SISTEMA DE GENERACIÓN DE ENERGÍA EÓLICA
2.2.2
Tren de impulsión
Las partes giratorias de una turbina eólica forman el tren de impulsión, comúnmente por
un eje de baja velocidad (lado del rotor), una caja de engranajes y un eje de alta velocidad
(lado del generador). Otros componentes del tren de impulsión son los rodamientos, uno
ó más acoplamientos, un freno y las partes giratorias del generador.
El propósito de la caja de engranajes es aumentar la razón de velocidad de giro del
rotor, que es de un valor bajo (decenas de rpm), a una velocidad adecuada para operar un
generador estándar (cientos ó miles de rpm). Algunas turbinas eólicas utilizan generadores
de baja velocidad, que son diseñados especialmente para que no requieran ninguna caja
de engranajes.
2.2.3
Generador
Casi todas las turbinas eólicas utilizan generadores sı́ncronos ó de inducción. Ambos
diseños operan a una velocidad giratoria constante ó casi constante cuando el generador
está conectado directamente a la red de servicio.
La mayorı́a de las turbinas eólicas instaladas en aplicaciones conectadas a red utilizan
generadores de inducción. Un generador de inducción opera dentro de un estrecho lı́mite
de velocidad ligeramente mayor que su velocidad sı́ncrona (un generador de cuatro polos
operando en una red de 60 Hz tiene una velocidad sı́ncrona de 1800 rpm). La ventaja
principal es que son robustos, baratos y fáciles de conectar a una red eléctrica.
Una alternativa para la generación de energı́a eléctrica involucra el uso de una turbina
eólica de velocidad variable (es el tipo de turbina que se emula en esta tesis). Son numerosos los beneficios que ofrece este sistema, incluyendo la reducción del desgaste y la
posibilidad de operar la turbina eólica a su máxima eficiencia a diferentes velocidades del
viento, obteniendo como resultado un incremento en la captura de energı́a. Aunque hay
un gran número de opciones de hardware para la operación a velocidad variable, se utilizan
opciones de electrónica de potencia en la mayorı́a de las máquinas actualmente diseñadas,
lo que permite que los generadores sı́ncronos ó de inducción puedan operar a velocidad
variable cuando se utilizan convertidores de potencia adecuados [9].
2.2. ESTRUCTURA GENERAL DE UNA TURBINA EÓLICA
2.2.4
17
Góndola y sistema de orientación
Está etapa aloja a la turbina eólica, al bastidor principal y al sistema de orientación. El
bastidor principal facilita el montaje y la alineación apropiada de los componentes del
tren de impulsión. La cubierta de la góndola protege el contenido de las condiciones
climatológicas.
El sistema de orientación se requiere para mantener el eje del rotor alineado apropiadamente con la dirección del viento, la pieza principal es un rodamiento grande que conecta
el bastidor principal con la torre. Se utiliza generalmente un sistema de orientación activo
para turbinas eólicas a barlovento, contiene uno ó mas motores, este mecanismo se alinea
automáticamente mediante un sensor que determina la dirección del viento y se encuentra
montado en la góndola. En algunas ocasiones existen frenos en este tipo de diseños para
mantener la góndola en posición. Los sistemas de orientación libres (se auto alinean con
el viento) se utilizan comúnmente en turbinas eólicas con rotor a sotavento.
2.2.5
Torre y cimentación
Actualmente los principales diseños de torres son del tipo auto soportada utilizando tubos
de acero y de concreto, la altura de la torre es normalmente de 1 a 1.5 veces el diámetro
del rotor, pero en cualquier caso debe tener al menos 20m. Para la selección de la torre son
de gran importancia las caracterı́sticas del sitio, la dureza de la torre es el factor que más
influye en la dinámica de la turbina1 , debido a la posibilidad de que se acoplen vibraciones
entre la torre y el rotor.
Para turbinas eólicas con rotor a sotavento debe considerarse el efecto sombra que
produce la torre ya que genera fluctuaciones de energı́a y de ruido. Debido al efecto sombra
que produce la torre, las turbinas con rotor a sotavento son más ruidosas que las de rotor
a barlovento [9].
2.2.6
Controles
El sistema de control para una turbina eólica es muy importante con respecto a la operación
de la máquina y a la producción de energı́a. Un sistema de control de una turbina eólica
contiene los siguientes componentes:
1
La dinámica de la turbina se refiere a la acción de fuerzas a la que se somete el sistema mencionado,
cuyas variables que influyen son la inercia, coeficiente de fricción y dureza del sistema.
18
CAPÍTULO 2. SISTEMA DE GENERACIÓN DE ENERGÍA EÓLICA
Sensores – velocidad, posición, flujo, temperatura, corriente, voltaje, etc.
Controladores – mecanismos mecánicos, circuitos eléctricos y computadoras
2.3
Amplificadores de potencia – interruptores, amplificadores eléctricos, bombas hidráulicas
y válvulas
Actuadores – motores, pistones, magnetos y solenoides [9].
Estructura del sistema implementado
Con el desarrollo de la sección anterior se obtiene un panorama general de las partes principales que forman una turbina eólica real (Figura 2.1). Sin embargo, no necesariamente
se implementa cada una de las etapas definidas anteriormente en el sistema a desarrollar.
En esta sección se presenta la estructura del sistema implementado, donde se incluyen
las partes que se consideran para llevar a cabo el desarrollo de dos de las metas de principal
importancia en este trabajo de tesis:
la implementación en simulación del modelo del sistema completo de generación
eléctrica, incluyendo el emulador de turbina eólica en MATLAB/SIMULINK, y el
desarrollo de
un emulador de turbina eólica que permita reproducir el comportamiento de una
turbina ante perfiles de viento reales.
Tanto para llevar a cabo la implementación en simulación como experimentalmente,
se debe desarrollar un modelo matemático que represente el comportamiento del sistema
real. El sistema real que se toma como base para este trabajo de tesis se desarrolló
en CENIDET y se encuentra en la referencia [1], donde se implementa experimentalmente un sistema de generación de energı́a eléctrica para aplicaciones aisladas. El modelo
matemático del sistema desarrollado en [1] se encuentra implementado en el software de
simulación PSpice.
Debido a su robustez y a las caracterı́sticas de esta tesis el software elegido es MATLAB/SIMULINK. Por lo tanto, se cambió el modelo del sistema de generación eléctrica
realizado en PSpice a MATLAB/SIMULINK, para poder acoplar ambos modelos (turbina
eólica y sistema de generación de energı́a).
2.3. ESTRUCTURA DEL SISTEMA IMPLEMENTADO
19
En la Figura 2.4 se presenta un diagrama a bloques de los sistemas acoplados; se
incluye la turbina eólica y el sistema de generación de energı́a eléctrica desarrollado en [1].
Posteriormente se presenta una lista con la descripción de cada bloque, comentándose las
caracterı́sticas principales de cada uno de ellos.
Implementación en simulación
Implementación
experimental (Emulador)
Rotor
Tren de
impulsión
Generador
Carga
Convertidor del
lado de la máquina
Control
Figura 2.4: Diagrama de bloques del sistema de generación de energı́a eólica.
ROTOR – Este modelo representa las caracterı́sticas estáticas del rotor y se utiliza
para la implementación tanto en simulación como experimental; contempla un rotor de
tres palas e incluye la posibilidad de controlar el ángulo de inclinación de las mismas.
Consta de tres entradas, velocidad del viento (Vw ), velocidad del rotor (ωr ) y el ángulo
de inclinación (β) de las palas, que permanece fijo en este caso; como salida se obtiene
un par rotor (Tr ). Las ecuaciones que describen la caracterı́sticas estáticas del rotor son
las siguientes: (3.1), (3.2), (3.3), (3.4) y (3.5). En esta tesis también se le conoce como
modelo estático, y se presenta a detalle en la sección 3.3.1.
TREN DE IMPULSIÓN – El modelo del tren de impulsión se encuentra formado por un eje de baja velocidad, una caja de engranajes, un eje de alta velocidad, la
dinámica de la turbina eólica y la dinámica del generador. Consta de dos entradas, el par
mecánico del rotor (Tr ) proveniente del modelo estático y par mecánico del generador (Tg )
proveniente del modelo del generador. Consta de dos salidas, velocidad en el eje de alta
(ωg ) y velocidad en el eje de baja (ωr ).
En esta tesis también se le conoce como modelo dinámico, se presenta a detalle en
la sección 3.3.2, la ecuación (3.11) representa el comportamiento del tren de impulsión,
utilizado para la implementación en simulación. Para la implementación experimental se
utiliza la ecuación (3.12) que se deriva de la ecuación (3.11), omitiendo la dinámica del
generador.
GENERADOR – El tipo de máquina utilizada es una MIDA de dos polos, es-
20
CAPÍTULO 2. SISTEMA DE GENERACIÓN DE ENERGÍA EÓLICA
pecificada para operar con una tensión nominal de 42Vrms entre terminales y su conexión
es en “Y”; forma parte del sistema de máquinas eléctricas DE LORENZO. La MIDA se
encuentra disponible en el laboratorio de máquina eléctricas de CENIDET. En esta tesis
no se desarrolla el modelo de la MIDA2 , ni se aborda a detalle ya que sólo se implementa el
modelo en otra plataforma de simulación. Sin embargo, en el disco adjunto a esta tesis se
incluye el programa desarrollado en MATLAB/SIMULINK donde se encuentra la función
S del modelo de la MIDA.
CONVERTIDOR DEL LADO DE LA MÁQUINA – En un sistema de
generación eléctrica de velocidad variable y frecuencia constante como el caso abordado
en esta tesis, el estator suele estar conectado a la red ó a alguna carga aislada, mientras
que el rotor lo hace a través de un convertidor electrónico de potencia de cuatro cuadrantes
[13]. Únicamente se modela el convertidor del lado de la máquina (MSC) ya que el banco
de pruebas se encuentra incompleto, faltando el convertidor del lado de la red (GSC). El
modelo del convertidor se desarrolla con interruptores ideales (MSC) y sólo se implementa
en simulación.
CONTROL – El bloque de la Figura 2.4, correspondiente al controlador del MSC,
es el encargado de generar las señales de tensión y frecuencia adecuadas en el circuito del
rotor, para mantener constante la tensión y la frecuencia en el circuito del estator. Como
no es objetivo de esta tesis el control de la MIDA, se implementa un controlador sencillo
tipo PI empleando el método de sintonización lugar de las raı́ces; cabe apuntar que el
controlador se implementa únicamente en simulación.
CARGA – Como se trata de una aplicación aislada el modelo de la carga es del tipo
puramente resistivo de un valor fijo, trifásico y únicamente se implementa en simulación.
2.4
Principio de funcionamiento de una turbina eólica
Las turbinas eólicas son dispositivos que convierten la energı́a cinética del viento en energı́a
mecánica. La captación de la energı́a se produce mediante la acción del viento sobre las
palas. El principio aerodinámico por el cual el conjunto de palas gira, es similar al que
hace que los aviones vuelen. Según este principio, el aire es obligado a fluir por las caras
superior e inferior de un perfil inclinado, generando una diferencia de presiones entre ambas
caras, y dando origen a una fuerza resultante que actúa sobre el perfil.
2
El modelo matemático ası́ como detalles de la MIDA se encuentran en la tesis [1].
2.4. PRINCIPIO DE FUNCIONAMIENTO DE UNA TURBINA EÓLICA
21
Si descomponemos esta fuerza en dos direcciones obtendremos:
Fuerza de sustentación, ó simplemente sustentación de dirección perpendicular al
viento.
Fuerza de arrastre, de dirección paralela al viento.
Según cómo estén montadas las palas con respecto al viento y al eje de rotación, la
fuerza que producirá el par motor será dominante de arrastre ó de sustentación. Con excepción de las turbinas de eje vertical, hoy en todas las turbinas eólicas la fuerza dominante
es la de sustentación, pues permite obtener, con menor peso y coste, mayores potencias
por unidad de área de rotor, la Figura 2.5 describe lo antedicho.
Fuerza de
sustentación
Flujo del
viento
Fuerza de
arrastre
Figura 2.5: Fuerza de sustentación y fuerza de arrastre.
Para que una turbina eólica arranque se necesita de un valor mı́nimo del viento
para vencer los rozamientos y comenzar a producir trabajo útil. A este valor mı́nimo se
le denomina velocidad de conexión ó de arranque, sin la cual no es posible arrancar una
turbina (esta velocidad esta comprendida entre 3-5 m{s). A partir de este punto empezará
a rotar convirtiendo la energı́a cinética en mecánica, ocurriendo de esta forma hasta que
alcance la potencia nominal, generalmente la máxima que puede entregar.
Una vez en la región de operación, los mecanismos activos ó pasivos de regulación
empiezan a actuar para evitar que la máquina trabaje bajo condiciones para las que no
fue diseñada. Aunque continúe operando a velocidades mayores, la potencia que entrega
no será diferente a la nominal, y esto se producirá hasta que alcance la velocidad de corte,
donde, por razones de seguridad, se detiene (esta velocidad se considera a partir de 25
m{s) [9]-[12].
22
CAPÍTULO 2. SISTEMA DE GENERACIÓN DE ENERGÍA EÓLICA
Capı́tulo
3
Modelado del sistema y
resultados de simulación
3.1
Introducción: modelado y simulación
El modelado y la simulación son procedimientos inseparables que incluyen actividades
complejas, asociadas con la construcción de modelos que representan procesos reales y
con la experimentación de los modelos para obtener datos del comportamiento del sistema
que se modela. Ası́, el modelado trata principalmente las relaciones entre los procesos
dinámicos reales y sus modelos; la simulación se refiere a todas las relaciones entre el
modelo y la herramienta de simulación.
En la actualidad el enfoque del modelado y la simulación ha ido en aumento inevitablemente, esto para resolver diferentes tipos de problemas prácticos. Los modelos
matemáticos de sistemas dinámicos y las simulaciones en computadora encuentran aplicación en áreas técnicas y no técnicas tan diversas como ingenierı́a, economı́a, medicina,
ecologı́a y algunas ciencias sociales. El propósito de estudiar sistemas mediante el enfoque del modelado y la simulación tiene como objetivo llevar a cabo diferentes metas
sin la necesidad de construir u operar procesos reales [14]. Algunas de las metas son las
siguientes:
aumentar la comprensión de algunos mecanismos en el proceso estudiado
predecir el comportamiento del sistema en diferentes situaciones dónde cualquier
nivel de predicción representa un beneficio
23
24
CAPÍTULO 3. MODELADO DEL SISTEMA Y RESULTADOS DE SIMULACIÓN
permitir el diseño y evaluación de sistemas de control compuestos
estimar aquellas variables de proceso las cuales no son medibles directamente
probar la sensibilidad de los parámetros del sistema
optimizar el comportamiento del sistema
permitir diagnóstico de fallas eficiente
hacer posible la exploración de tales situaciones que en el sistema real serı́a arriesgado, problemático ó caro y ası́ lograr un entrenamiento al operador seguro y barato
verificar modelos obtenidos de algún otro modo.
Aunque existe una variedad de técnicas de modelado y de herramientas de simulación,
ni la computadora ni el modelo pueden reemplazar completamente las decisiones humanas,
los criterios, la intuición y la experiencia las cuales siguen jugando un papel significante
determinando la validación y utilidad de modelos para aplicaciones prácticas.
3.2
Tipos de modelos y conceptos de validación
Los modelos pueden ser divididos en varios tipos; en esta sección se presentará brevemente
una de la posibles clasificaciones: modelos fı́sicos, mentales y simbólicos. Además, se
comentarán algunos métodos para verificar ó validar los mismos. Lo anterior tiene como
objetivo identificar dónde se encuentra clasificado el modelo que se implementa en esta
tesis y verificar su validez [14].
3.2.1
Modelos fı́sicos
Estos modelos representan a los sistemas fı́sicos; su construcción a menudo es costosa,
consume tiempo y es poco práctica. Los modelos fı́sicos que tienen carácter estático pueden
ser cualquier modelo-escalado (modelo en pequeña escala de autos, edificios, barcos, etc.)
ó modelos artificiales (estructuras moleculares, muñecas, caricaturas, etc.).
Aquellos con carácter dinámico son divididos en modelos análogos - el sistema modelado será representado con la ayuda de la analogı́a correspondiente, la cual probablemente
es adecuada por varias razones (por ejemplo, ratas ó monos representan un tipo de modelo
3.2. TIPOS DE MODELOS Y CONCEPTOS DE VALIDACIÓN
25
análogo de humanos en las pruebas de nuevas drogas); y prototipos - copias en pequeña
escala de sistemas reales, laboratorios y plantas piloto de diferentes procesos industriales,
sistemas de lı́neas ferroviarias en miniatura, etc.
3.2.2
Modelos mentales
Estos tipos de modelos tienen caracterı́sticas intuitivas y existen únicamente en la mente
humana. Son poco claros, imprecisos y problemáticos para la comunicación. Las experiencias humanas acumuladas representan a los modelos mentales que apoyan la planeación y
decisión manufacturando procesos. Los puntos de vista personales de un objeto ó de un
evento se pueden basar tanto en un modelo mental como en la capacidad humana para
interpretar funcionamientos, etc.
3.2.3
Modelos simbólicos
Los modelos simbólicos son menos problemáticos de manipular y construir que los fı́sicos,
adicionalmente pueden dividirse en matemáticos y no-matemáticos. El último mencionado
puede ser lingüı́stico (descripción de eventos verbal ó escrita, experiencias, escenas, etc.);
gráfico (pinturas, fotografı́as, dibujos); ó esquemáticos (diagramas de flujo, mapas, diagramas de red, etc.). La propiedad común de este tipo modelos es con frecuencia la
problemática para obtener información precisa de ellos, particularmente de los expresados
verbalmente.
Por varias razones los modelos matemáticos son los más importantes y la categorı́a
más ampliamente utilizada. Son concisos, claros y se interpretan fácilmente; además, la
manipulación y la evaluación de diferentes alternativas es relativamente barata.
Un modelo matemático puede definirse como el mapeo de relaciones entre las variables fı́sicas del sistema que será modelado en la estructura matemática correspondiente.
Cuando tales relaciones están determinadas únicamente para el estado estable, el modelo
tiene carácter estático y se describe con ecuaciones algebraicas. Por otro lado, los modelos
matemáticos dinámicos incluyen el comportamiento del transitorio ası́ como del estado
estable del sistema y son descritos por un sistema de ecuaciones diferenciales (de varios
tipos) y por una serie de condiciones de operación [14].
26
CAPÍTULO 3. MODELADO DEL SISTEMA Y RESULTADOS DE SIMULACIÓN
3.2.4
Conceptos de validación
Antes de asegurar ó afirmar decisiones acerca de la versión final del modelo del sistema a
simular y antes de comenzar con la experimentación, deben realizarse los procedimientos
de verificación y validación de modelos.
El término “validación” es el interesado en demostrar que el modelo es una representación adecuada de la realidad, mientras que el término “verificación” se relaciona
con la comprobación de la consistencia del diseño (precisión y exactitud del modelado y
metodologı́as de solución, algoritmos, programas de computadora, etc.). Es decir, se desea
probar que el modelo trabaja como se ha pensado.
Como el sistema real nunca es completamente conocido y el modelo nunca es una
representación exacta del sistema real, la validación puede aproximarse pero nunca lograrse
con exactitud. Un modelo no tiene valor hasta que se juzgue válido, excepto quizás, siempre que ayude a mejorar la comprensión del sistema que será modelado. Se ha prestado
muy poca atención a la validación, la cual es más problemática comparada con la verificación.
Se tratará de explicar el método para validación de modelos para el cual no existe
un procedimiento sistemático ó inclusive un algoritmo. Una gran mayorı́a de la gente
dedicada a modelar sistemas no está interesada en acercarse a la realidad bajo ningún
precio, más bien, prefieren desarrollar y validar modelos prácticos a un precio razonable y
dentro de lı́mites de tiempo aceptables.
Aunque anteriormente se daba muy poca importancia a la validación, varios modelos
relativamente buenos fueron desarrollados e implementados en el pasado (especialmente
en las ciencias de la ingenierı́a). Ası́ pues, el objetivo de la validación debe inclinarse más
hacia establecer el grado de confianza para demostrar que tan atinadamente el modelo
representa el sistema real. En este sentido, debe considerarse lo siguiente:
Validez de conceptos – En el enfoque racionalista, se acepta que el modelo es un
conjunto de deducciones lógicas de una serie de teoremas ó axiomas cuyas afirmaciones son incuestionables, y en este sentido la validación se concentra en cuestionar
las suposiciones básicas en las cuales se basa el modelo. Por otro lado, el enfoque
empı́rico declina el aceptar cualquier axioma ó teorema, y la validación involucra la
colección de evidencia empı́rica para soportar los postulados ó suposiciones [14].
3.3. MODELO DE LA TURBINA
27
Validez de metodologı́a – Aquı́ se examina la justificación de la metodologı́a empleada en la formulación del modelo y la solución del problema (aproximación de un
problema no-lineal mediante métodos lineales, representación de sistemas continuos
por su equivalente en discreto, uso inapropiado de métodos computacionales, etc.).
Es obvio que con la metodologı́a equivocada puede conducir a soluciones absurdas.
Validez de datos – Los datos pueden ser de valor cuestionable por varias razones y
deben admitirse ası́ antes de concluir cualquier cosa. Los datos pueden ser defectuosos como consecuencia de errores de observación, errores de calibración, interpolación/extrapolación, estimación inapropiada de parámetros, etc.
Validez de resultados – Aquı́ juegan un papel importante el grado de ajuste entre
la respuesta del modelo y los resultados teóricos ó los datos medidos. El grado
de ajuste se obtiene usando métodos estadı́sticos tales como análisis de variación,
regresión, análisis espectral, etc; lo cual brinda datos útiles para la interpretación de
los resultados.
Validez de inferencia – La validez de inferencia trata un modelo como válido cuando
la conclusión del estudio realizado por diferentes personas relacionadas con el tema
es la misma [14].
En la siguiente sección se presentaran el modelo estático y dinámico de la turbina
y algunos resultados en simulación. De acuerdo a lo mencionado en la sección anterior
se puede ubicar el modelo que se desarrolla en esta tesis, que es del tipo matemático,
dentro de los modelos simbólicos. El criterio que se aplica para asegurar que el modelo
desarrollado en esta tesis es válido es el de validez de inferencia.
3.3
Modelo de la turbina
El modelo de la turbina eólica se divide principalmente en dos partes. La primera parte
es el modelo estático de la turbina, que incluye la curva de potencia, el par desarrollado,
etc. Las entradas para este modelo son la velocidad del viento Vw , la velocidad angular
del eje de baja ωr y el ángulo de inclinación de las palas β, que en este caso permanece
fijo, mientras que la salida es el par rotor generado Tr .
La segunda parte es el modelo dinámico de la turbina, que incluye la inercia, el
amortiguamiento y la dureza, tanto de la turbina como del generador, el eje de baja
28
CAPÍTULO 3. MODELADO DEL SISTEMA Y RESULTADOS DE SIMULACIÓN
velocidad, el eje de alta velocidad y la caja de engranajes. Las entradas para este modelo
son el par rotor generado Tr y el par generador Tg mientras que la salidas son la velocidad
en el eje de baja ωr y la velocidad en el eje de alta ωg .
3.3.1
Modelo estático
Las ecuaciones que representan el comportamiento estático del rotor eólico se enlistan a
continuación. La ecuación (3.1) define la razón de la velocidad de la punta de la pala al
centro de la misma. Dónde rr es el radio del rotor en metros (m), ωr es la velocidad del
rotor en el eje de baja velocidad en (rad{s) y Vw la velocidad del viento en (m{s).
λ
r r ωr
Vw
(3.1)
La potencia del viento extraı́da de un rotor eólico se ve limitada por su diseño
aerodinámico. La curva de potencia se define por medio de las ecuaciones (3.2) y (3.3), en
las que CP es el coeficiente de potencia y β el ángulo de inclinación de las palas del rotor
eólico. c1 , c2 , c3 , c4 , c5 y c6 son los coeficientes de potencia dependientes del diseño de cada
rotor eólico. La Figura 3.1 presenta la curva de potencia de la turbina eólica CP , contra
la razón de velocidad de la punta de la pala al centro de la misma λ, para varios valores
del ángulo de inclinación de las palas β.
CP pλ, β q c1
1
λi
λ
c2
λi
c3β c4
1
0.08λ
e
c5
λi
β0.035
3
1
c6 λ
(3.2)
(3.3)
El coeficiente de par se define mediante la ecuación (3.4), definición necesaria para
determinar el par mecánico desarrollado por la turbina eólica y que está definido por la
ecuación (3.5). Donde ρ es la densidad del viento en (kg {m3 ) y Ar es el área que cubre el
rotor eólico en (m2 ) [2]-[7].
CλP
(3.4)
12 ρAr rr Vw2CM
(3.5)
CM
Tm
3.3. MODELO DE LA TURBINA
29
←β=0
0.45
0.4
β=5
↓
Coeficientes CP(λ
λ,β
β)
0.35
0.3
β=10
↓
0.25
0.2
β=15
↓
0.15
0.1
←β=20
0.05
0
-0.05
0
5
10
15
LAMBDA
Figura 3.1: Curva de potencia CP pλ, β q.
Todos los sistemas existentes cambian con una razón de tiempo y cuando esa razón
es significativa, se les denomina sistemas dinámicos. La principal caracterı́stica es que la
salida en cualquier instante de tiempo depende del estado anterior y no únicamente de la
entrada actual (“efecto memoria”) [14], la sección 3.3.2 presenta el modelo dinámico de la
turbina eólica.
3.3.2
Modelo dinámico
El par mecánico calculado a partir del modelo estático se usa como entrada del modelo
dinámico. En este trabajo se presentan dos modelos dinámicos; el que se describe por
medio de la ecuación (3.11) correspondiente a la inercia, el amortiguamiento y la dureza,
tanto de la turbina como del generador, el eje de baja velocidad, el eje de alta velocidad y
la caja de engranajes. Este modelo de aquı́ en adelante se le llamará caso I y se utilizará
para realizar la implementación en simulación del sistema completo (Figura 3.4).
Al modelar el caso I se obtiene un conjunto complicado de ecuaciones, por tanto se
deben tomar en cuenta las ecuaciones (3.6), (3.7) y (3.8). Lo anterior se considera para
reducir la complejidad del sistema, reflejando los parámetros del eje de baja velocidad al
eje de alta velocidad.
Jre
NJr2
(3.6)
30
CAPÍTULO 3. MODELADO DEL SISTEMA Y RESULTADOS DE SIMULACIÓN
ωre
N ωr
(3.7)
TNr
(3.8)
Tre
Donde Jr , ωr y Tr son la inercia-velocidad-par del rotor eólico. Jre , ωre y Tre son
inercia-velocidad-par reflejados del eje de baja velocidad al eje de alta velocidad. La
fricción y dureza equivalentes entre ambos ejes se determinan por las ecuaciones (3.9) y
(3.10) respectivamente. Donde Br , Bg y Beq son los coeficientes de amortiguamiento del
rotor-generador-equivalente del sistema dinámico, de igual modo Kr , Kg y Keq son los
coeficientes de dureza del rotor-generador-equivalente del mismo sistema; N es la razón
de engranajes de la caja de velocidades [8],[13],[15].
Beq
Bg
Br
N2
(3.9)
Keq
Kg
Kr
N2
(3.10)
De acuerdo a las ecuaciones planteadas anteriormente, se obtiene una ecuación de
estado que representa el modelo dinámico para el caso I y se ilustra en la ecuación (3.11)
[16],[17].
ω9 re ωg θre 9
9 θ9g
Beq
Beq
re
Jre
J
Beq
Beq
Jg
J
1
0
Keq
Keq
re
Jre
J
Keq
Keq
Jg
J
0
0
0
1
0
0
g
g
ωre ωg θre θg
1
N Jre
0
0
0
0
Jg 0 1
Tre
Tg
(3.11)
0
Para realizar la simulación del caso I se implementa el esquema presentado en la
Figura 3.2 y el resultado de la simulación se presenta en la Figura 3.3.
3.4. CONDICIONES DE OPERACIÓN
V
31
w
ωr
Br
Tr
N
β
0
ωg
Jg
Bg
Kr
Tg
ωr
Jr
Kg
Figura 3.2: Modelo estático y dinámico implementado en MATLAB/SIMULINK.
El segundo modelo dinámico que se implementa se denomina caso II. Está formado
por una caja de engranajes, inercia y amortiguamiento del eje de baja velocidad y la
relación de la caja de engranajes N ; el comportamiento del sistema descrito anteriormente
se obtiene mediante la ecuación (3.12).
Como puede observarse en el modelo del caso II no se toma en cuenta el generador,
ni sus caracterı́sticas dinámicas, debido a que se encuentra disponible fı́sicamente en la
implementación experimental en el banco de pruebas. Por el momento no se requieren
emular las caracterı́sticas de un generador de mayor capacidad, ya que se está emulando
un sistema de muy baja potencia.
ω9 r
Br
J
r
θ9r
1
0
0
ωr
θr
Jr 1
0
Tr
0
(3.12)
La implementación se hace de igual forma en MATLAB/SIMULINK, esquema similar
al mostrado en la Figura 3.2 pero con la diferencia que la parte dinámica sólo tiene una
entrada Tr y una salida ωr .
Cabe señalar que aunque en las secciones anteriores se menciona un modelo estático
y un modelo dinámico, para realizar tanto la simulación como la implementación experimental se considera todo como un sólo modelo matemático.
3.4
Condiciones de operación
En todo sistema que se modela se requiere definir bajo qué condiciones va a operar y
bajo qué condiciones es válido el modelo. Una turbina eólica tiene diferentes formas de
32
CAPÍTULO 3. MODELADO DEL SISTEMA Y RESULTADOS DE SIMULACIÓN
operación: velocidad variable, velocidad constante, control del ángulo de inclinación y
control por pérdida aerodinámica. Por lo tanto, se elige el tipo de turbina de acuerdo a lo
siguiente:
Debido a que esta tesis completa el trabajo desarrollado en [1] se selecciona una
turbina eólica de velocidad variable con la posibilidad de controlar el ángulo de inclinación
de las palas. Las turbinas eólicas con control del ángulo de inclinación de las palas son
más interesantes, basándose en el hecho de que pueden operar en un amplio intervalo de
velocidades de viento, logrando ası́ la capacidad de mantener constante la extracción de
potencia a bajas y altas velocidades.
Uno de los obstáculos que se presentaron durante el desarrollo de esta tesis fue la
selección de los parámetros fı́sicos de la turbina eólica y la comprobación de los modelos
por comparación con medidas reales. Lo anterior resulta difı́cil dada la escasez de registros
detallados de variables eléctricas y mecánicas en sistemas de generación de energı́a eólica.
Por esta razón, se realiza un escalamiento de parámetros para el sistema desarrollado
en esta tesis (300W ), basándose en los parámetros reportados de los diferentes sistemas
estudiados en la sección 1.3.
En la Tabla 3.1 se enlistan los parámetros utilizados para realizar la simulación y la
implementación experimental del sistema de generación completo.
Tabla 3.1: Parámetros de la turbina eólica.
Parámetros de la
turbina eólica
Potencia nominal, Pn
Radio del rotor, rr
Densidad del viento, ρ
Velocidad de arranque, Va
Velocidad nominal, Vn
Velocidad de corte, Vc
Inercia del rotor, Jr
Inercia del generador, Jg
Amortiguamiento del rotor, Br
Amortiguamiento del generador, Bg
Dureza del rotor, Kr
Dureza del generador, Kg
Razón de la caja de engranajes, N
Valor
300W
1m
1.225kg {m3
3.5m{s
12m{s
25m{s
0.3N ms2
0.025N ms2
0.024N ms
0.0055N ms
1.5e4 N m
1.5e2 N m
4
3.5. RESULTADOS DE SIMULACIÓN
33
Con las caracterı́sticas de la turbina eólica seleccionadas se procede con las simulaciones del modelo. Los parámetros seleccionados y presentados en la Tabla 3.1 son los
utilizados para llevar a cabo todas las pruebas en este trabajo de tesis. En la sección 3.5
se presentan los resultados de la simulación del modelo matemático de la turbina eólica
en MATLAB/SIMULINK.
3.5
Resultados de simulación
3.5.1
Simulación del modelo de la turbina eólica
De acuerdo al desarrollo de los modelos en la sección anterior, en la Figura 3.3 se presenta
el resultado de la simulación realizada con el modelo descrito por las ecuaciones (3.1), (3.2),
(3.5) y (3.11). Para realizar esta simulación se propone un par generador Tg constante con
un perfil de viento propuesto. La razón para proponer un par de carga Tg constante se
debe a que si se realiza la simulación con el sistema de generación completo (Figura 3.4)
los tiempos de simulación resultarı́an enormes.
Velocidad del viento
9
m/s
8
7
6
5
0
100
200
300
400
500
600
t (segundos)
700
800
900
1000
Velocidad del rotor eólico (eje de baja)
100
80
60
0
100
200
300
400
500
600
700
800
t (segundos)
Par Mecanico del rotor Tr y Par constante del generador Tg
900
1000
0
100
200
300
400
900
1000
4
3
Nm
rad/s
120
2
1
0
500
600
t (segundos)
Figura 3.3: Vw , ωr , Tr y Tg .
700
800
34
CAPÍTULO 3. MODELADO DEL SISTEMA Y RESULTADOS DE SIMULACIÓN
Por el momento, la carga en el banco de pruebas permanece a un valor fijo, provocando un par de carga constante por parte del generador, por lo tanto puede hacerse la
consideración anterior, resultando tiempos de simulación mucho menores.
Comentando brevemente los resultados presentados en la Figura 3.3, se debe observar
que la velocidad en el rotor sigue al perfil de viento aplicado, lo que provoca un aumento
ó una disminución en el par del rotor eólico. Debido a la dinámica del sistema el par del
rotor eólico trata de igualarse al par de carga, estos cambios pueden notarse ya que se
propone un perfil de viento adecuado.
3.5.2
Simulación del sistema completo
Un punto que forma parte de la metodologı́a es la implementación del modelo de la turbina
eólica al modelo existente del sistema completo de generación eléctrica. Cabe recordar que
el objetivo de esta tesis no trata el estudio del generador ni del convertidor; por lo tanto,
no se profundiza en el modelado del sistema, sólo se presenta el esquema del mismo en
MATLAB/SIMULINK Figura 3.4, este esquema se encuentra en el disco adjunto a este
documento de tesis.
V
ωr
0
w
Br
Tr
N
ωg
Bg
β
Kr
Tg
Jr
Figura 3.4: Turbina eólica, MIDA, MSC y carga.
Jg
ωr
Kg
[wm]
3.5. RESULTADOS DE SIMULACIÓN
35
En la Tabla 3.2 se presentan los parámetros de la MIDA disponible en el laboratorio
de máquinas eléctricas de CENIDET, forma parte del sistema de DE LORENZO. Estos
parámetros se obtuvieron mediante una caracterización utilizando la norma IEEE112 [18]
y se utilizan para realizar la simulación del sistema completo (Figura 3.4).
Tabla 3.2: Parámetros de la MIDA.
Parámetros
Resistencia del estator Rs
Resistencia del rotor Rr
Inductancia Lsm
Inductancia Lrm
Inductancia Lls
Inductancia Llr
Polos P
Valor
0.37895Ω
0.2857Ω
17.2807mH
17.2807mH
0.5319mH
0.5319mH
2
Es importante ver el comportamiento conjunto entre ambos sistemas para que posteriormente puedan cotejarse resultados en simulación con resultados experimentales. El
modelo del sistema de generación está formado por una MIDA, un convertidor del lado de
la máquina (MSC), la carga y su control PI correspondiente.
Para verificar el control y el acoplamiento de los modelos se realiza la simulación del
sistema completo y el resultado se presenta en la Figura 3.5. El perfil de viento utilizado
en esta simulación se elige para verificar el comportamiento del sistema del paso de la
velocidad sub-sı́ncrona a super-sı́ncrona. Este perfil es constante de 0s a 35s para verificar
la estabilidad del sistema y de 35s a 75s es variable para observar el paso de velocidad
sub-sı́ncrona a super-sı́ncrona.
Se debe notar que el par de la turbina Tr y el par generador Tg no alcanzan a igualarse
cuando el perfil de viento es variable, esto se debe a que el perfil de viento presenta cambios
mucho más rápidos que el perfil de viento utilizado en el sistema de la Figura 3.3, donde
Tr y Tg si se alcanzan a igualar.
La razón de elegir un perfil de viento con esos cambios mucho más rápidos, se debe
a que el tiempo de simulación aumenta considerablemente ya que el sistema completo
contiene señales de control y moduladores de ancho de pulso, por lo que se requiere un
paso de integración demasiado pequeño en la configuración del programa utilizado para
realizar la simulación. El tiempo de cómputo requerido para la simulación de la Figura
3.5 fue de aproximadamente dos semanas.
36
CAPÍTULO 3. MODELADO DEL SISTEMA Y RESULTADOS DE SIMULACIÓN
Velocidad del viento
m/s
10
8
6
4
0
10
20
30
40
t (segundos)
50
60
70
80
40
50
60
t (segundos)
Par Mecanico del rotor Tr y Par generador Tg
70
80
70
80
Velocidad del rotor eólico (eje de baja)
rad/s
120
100
80
60
0
10
20
30
0
10
20
30
10
Nm
5
0
-5
40
t (segundos)
50
60
Figura 3.5: Vw , ωr , Tr y Tg .
Nuevamente se puede observar que la velocidad del rotor sigue satisfactoriamente a
la velocidad del viento y que los pares generador-rotor tratan de igualarse.
La siguiente gráfica (Figura 3.6) presenta la misma simulación pero con un acercamiento en la región donde el perfil de viento es variable (35s a 75s), esto con el objeto
de observar el comportamiento que presenta la MIDA cuando cruza por la velocidad de
sincronı́a.
El perfil de viento fue creado con la intención de que la velocidad del generador
iniciara en una velocidad sub-sı́ncrona y pasara a su velocidad super-sı́ncrona. Esto se
puede observar en la corriente del rotor en la fase “A” aproximadamente a los 38s de
la simulación. De igual modo, mediante el perfil de viento adecuado la MIDA cruza de
velocidad super-sı́ncrona a sub-sı́ncrona, y esto se presenta aproximadamente a los 50s
de la simulación. En la misma figura se ilustran la velocidad del rotor en el eje de baja
velocidad y la velocidad del viento.
3.5. RESULTADOS DE SIMULACIÓN
37
Velocidad del viento
10
m/s
8
6
4
35
40
45
40
45
40
45
50
55
60
t (segundos)
Velocidad del rotor eólico (eje de baja)
65
70
75
50
65
70
75
65
70
75
rad/s
120
100
80
60
35
55
60
t (segundos)
Corriente de la fase A del rotor
10
A
5
0
-5
-10
35
50
55
t (segundos)
60
Figura 3.6: Paso de velocidad sub-sı́ncrona a super-sı́ncrona y viceversa.
Como ya se mencionó anteriormente no es objetivo de control la MIDA, sin embargo
hubo la necesidad de sintonizar los controladores para el MSC que son del tipo PI. Se
utiliza el método de sintonización lugar de la raı́ces y en la Tabla 3.3 se enlistan las
ganancias seleccionadas.
Tabla 3.3: Ganancias del control para la MIDA.
Tipo de
controlador
Controlador de voltaje
para la MIDA
Controlador de corriente
d, q para la MIDA
Función de
transferencia
ims psq
1
idr psq
1 sTm
ipd,qqr
Vpd,qqr
R
r
1
sσLr
PI sin
ganancia
s 50
s
s
500
s
KP
Ki
ts
4.48
224
77.186ms
1.56
780
1.96ms
38
CAPÍTULO 3. MODELADO DEL SISTEMA Y RESULTADOS DE SIMULACIÓN
Capı́tulo
4
Implementación del emulador
En este capı́tulo se describe cada una de las etapas que se desarrollaron para llevar a cabo
la implementación experimental del sistema emulador de turbina eólica en el laboratorio
de máquina eléctricas de CENIDET. La Figura 4.1 presenta un diagrama de bloques del
sistema emulador y posteriormente se define cada uno de ellos.
En la sección 4.1 se presenta a detalle la estructura del sistema emulador implementado en este trabajo. El motor de CD, su modelo y su control forman una etapa
importante del sistema emulador, ya que es la encargada de reproducir el comportamiento
de una turbina eólica real1 y se presenta en la sección 4.2.
Para impulsar al motor de CD se utiliza un convertidor tipo troceador y se presenta
en la sección 4.3. Finalmente, el modelo de la turbina eólica genera una señal a partir de
la velocidad del viento, que sirve como referencia para el control del motor de CD, todo el
procesamiento se realiza con la tarjeta de desarrollo eZdspF2812 de TI, esto se presenta
en la sección 4.4.
La implementación del sistema emulador desarrollada en este trabajo de tesis es la
primera realizada en CENIDET (utilizando la tarjeta eZdspF2812 y programándola mediante MATLAB/SIMULINK). Por lo tanto, es importante completar el trabajo anexando
los requerimientos mı́nimos del sistema, ası́ como una guı́a rápida de programación para
la tarjeta, esto se agrega en el Anexo C.
1
Las caracterı́sticas de la turbina eólica se obtienen mediante un escalamiento de parámetros y se
presentan en la Tabla 3.1, esto debido a que no existe en el mercado una turbina con esas caracterı́sticas.
39
40
CAPÍTULO 4. IMPLEMENTACIÓN DEL EMULADOR
4.1
Estructura del sistema emulador
Para entender la estructura del sistema emulador se deben tener en cuenta las partes que
lo conforman y se debe entender el funcionamiento que éste debe tener. Como puede
observarse en la Figura 4.1 el sistema emulador esta formado por el perfil de viento2 ,
la tarjeta de desarrollo DSC, el modelo de la turbina eólica, la etapa de potencia, el
acondicionamiento de las señales, el control y el motor de CD.
Emulador de turbina eólica
Modelo de la turbina
Vector de datos
con el perfil de
viento
eZdsp F2812
Etapa de potencia
Control del motor
iMac
Acondicionamiento
de señal
Motor de
CD
Figura 4.1: Diagrama de bloques del sistema emulador.
Se debe recordar que se requiere reproducir el comportamiento de una turbina eólica
real. Por lo tanto, cada bloque que conforma el sistema emulador debe cumplir con una
función especı́fica:
el vector de datos que contiene el perfil de viento funge como una de las entradas
que excita el modelo de la turbina, se envı́a a la tarjeta eZdspF2812 mediante la herramienta de comunicación RTDX por sus siglas en inglés Real-Time Data Exchange
2
el modelo de la turbina se encarga de enviar las señales de referencia al control del
motor de CD
el control del motor de CD envı́a las señales de control adecuadas a la etapa de
potencia
Se le llama perfil de viento al vector de datos ubicado en el espacio de trabajo de MATLAB, este se
obtiene a partir de la medición de la velocidad del viento, por el IIE.
4.2. MOTOR DE CD
la etapa de potencia impulsa al motor de CD
el motor de CD reproduce el comportamiento de la turbina eólica
41
la tarjeta eZdspF2812 se encarga del procesamiento de las señales producidas por el
modelo de la turbina, por el control del motor de CD y de recibir el perfil de viento
proveniente del espacio de trabajo de MATLAB
finalmente el acondicionamiento de señal adapta las señales de los sensores de corriente y de velocidad del motor de CD, al nivel requerido por los convertidores
analógico-digital (ADC) de la tarjeta eZdspF2812
En las siguientes secciones se presentan a detalle sólo algunas de las etapas que
conforman el sistema emulador, se omite en este capı́tulo el modelo de la turbina ya que
se presentó a detalle en el capı́tulo 3 y se omite el perfil de viento ya que se presenta a
detalle en el capı́tulo 5.
4.2
Motor de CD
Una máquina de CD puede operar como motor ó como generador, dependiendo de la
dirección del flujo de potencia a través de ella [19]. En este trabajo, la máquina de CD se
utiliza en modo motor. La clasificación de los motores de CD, de acuerdo con su modo de
conexión, es la siguiente:
excitación separada
excitación en derivación
imán permanente
serie
compuesto
De acuerdo con la literatura revisada en la sección 1.3, se observó que el criterio
para seleccionar el motor que emula a la turbina eólica debe ser de al menos el doble de la
potencia del generador. Este criterio está relacionado con la eficiencia η de las máquinas
eléctricas, determinada por la ecuación 4.1.
42
CAPÍTULO 4. IMPLEMENTACIÓN DEL EMULADOR
La eficiencia de los motores a plena carga, en promedio, es de cerca de 74% para los
de 1HP , 89% para los de 50HP , 93% para los de 500HP y 97% para los de 5000HP .
La eficiencia de los motores lentos es usualmente menor que los de alta velocidad, y la
dispersión entre los valores es de 4% [20]. La eficiencia se define como:
η
1 PPper
(4.1)
ent
De la referencia [1] se sabe que la MIDA con que cuenta el banco de pruebas de
DE LORENZO es de 300W . Para seleccionar el motor a utilizar se revisó la relación
de motores disponibles en CENIDET y de acuerdo al criterio se eligió el motor Baldor
CD3475 de 560W de excitación separada.
Debido a que el banco donde se monta el motor Baldor CD3475 está optimizado
para un motor del fabricante de DE LORENZO, se presentaron algunos problemas para
colocar el nuevo motor ya que tanto la altura del eje de la MIDA como la del eje del motor
de CD no coincidı́an.
Por lo tanto, hubo la necesidad de maquinar una placa de acero para realizar el
acoplamiento mecánico entre el banco de DE LORENZO y el motor Baldor CD3475. En
la Figura 4.2 se presenta el banco de pruebas con la MIDA y el motor Baldor CD3475
acoplados mecánicamente.
Figura 4.2: Acoplamiento mecánico completo.
4.2. MOTOR DE CD
43
Ya que se requiere que el motor de CD tenga la respuesta de una turbina eólica real,
se debe modelar y caracterizar el motor de CD, para que de este modo se obtengan las
ganancias necesarias de los controladores. Lo que permitirá obtener la respuesta deseada
de acuerdo a la referencia obtenida a partir del modelo de la turbina desarrollado en la
sección 3.3.
4.2.1
Modelo del motor
El equivalente eléctrico del motor de CD de excitación separada se presenta en la Figura
4.3. De acuerdo a este equivalente eléctrico se obtiene la ecuación de estado que modela
al motor de CD de excitación separada, ecuación (4.2).
+
ia,Ia
if,If
+
Lf
La
vf,Vf
va,Va
Rf
Ra
-
+
eg
w
-
Td
TL
Figura 4.3: Equivalente eléctrico de un motor de CD de excitación separada.
El modelo del motor se representa en términos de las variables de estado y de este
modo se implementa en MATLAB/SIMULINK para simular las caracterı́sticas dinámicas
y para calcular las ganancias de los controladores.
En el caso del motor de CD estudiado, la corriente de campo, la corriente de armadura, la velocidad del rotor y la posición son las variables de estado. La posición del
rotor se define como la integral de la velocidad y es considerada una variable de estado
sólo cuando la posición del eje es una variable controlable. En este trabajo la posición no
es una variable controlable, debido a que una turbina eólica gira libremente sin importar
su posición; por ende el emulador tendrá el mismo comportamiento [21].
44
CAPÍTULO 4. IMPLEMENTACIÓN DEL EMULADOR
i9 f
i
a
9
ω9 m
Rf
L
0
0
Ra
L
a
0
if LAF La Bm 0
f
if LAF
Jm
J
if
ia ωm
1
0
Lf
0
0
1
0
La
0
m
0
1
J
vf
va (4.2)
TL
m
Los parámetros del motor Baldor CD3475 se obtienen mediante una caracterización
realizada en el laboratorio de máquina eléctricas utilizando la norma IEEE113 [22], estos
parámetros se presentan en la Tabla 4.1 ası́ como la definición de cada parámetro que
aparece en la ecuación (4.2).
Tabla 4.1: Parámetros del motor de CD.
Parámetros
Resistencia de armadura Ra
Resistencia de campo Rf
Inductancia de armadura La
Inductancia de campo Lf
Inductancia mutua LAF
Inercia Jm
Amortiguamiento Bm
4.2.2
Valor
1.276Ω
163.39Ω
23.62mH
23.13H
821.6mH
25e3 N ms2
1e3 N ms
Control del motor
Antes de elegir el esquema de control del motor de CD se debe definir la región en la que
estará operando el motor. Para ello se sabe que la región de operación nominal de la MIDA
es de 3600rpm y el motor de CD debe alcanzar esa velocidad y un 30% más. Sin embargo,
la región de operación nominal del motor de CD es de apenas 1800rpm. Para poder
cumplir con lo establecido se debe operar el motor de CD en la zona de debilitamiento
de campo. Este esquema de operación permite alcanzar dos ó tres veces más la velocidad
nominal sin problema.
Si se requiere operar el motor en la zona de debilitamiento se debe controlar tanto el
circuito de armadura como el circuito de campo. Para poder operar el motor en esa zona
se deben implementar dos convertidores de potencia, uno para el circuito de armadura y
4.2. MOTOR DE CD
45
otro más para el circuito de campo.
El control de armadura utiliza un lazo interno de corriente y un lazo externo de
velocidad, ambos controladores son del tipo PI. El control por campo utiliza un lazo
de velocidad y también es tipo PI. El control de armadura se conoce como esquema en
cascada y se muestra en la Figura 4.4 que también es el esquema MATLAB/SIMULINK
implementado en la plataforma DSC seleccionada [21].
Control de velocidad por campo
Wref
IF
Iref
VF
Wr
u
Referencia de
velocidad
fcn
y
Wref
Iref
Wr
Iref
Wr
Embedded
MATLAB Function
VA
VA
Control de velocidad por armadura
Ia
IA
Controlador de corriente
-C-
TL
Te
Constant
DC Motor
Figura 4.4: Esquema de control para el motor de CD.
En la Tabla 4.2 se presentan las ganancias de los controladores PI para el motor
Baldor CD3475. El cálculo de las ganancias de los controladores se hizo mediante el
método del lugar de las raı́ces.
Tabla 4.2: Ganancias del control para el motor de CD.
Tipo de
controlador
Controlador de corriente
circuito de armadura
Controlador de velocidad
circuito de armadura
Controlador de velocidad
circuito de campo
Función de
transferencia
ia psq
1
Va psq ra sLa
ωr psq
Laf if
i a ps q
Bm sJ
ωr psq
Laf ia
if psq
Bm sJ
PI sin
ganancia
s 600
s
s
20
s
s
1.5
s
KP
Ki
ts
0.0732
43.92
157ms
1.15
23
387ms
0.0181
0.2715
2.98s
46
CAPÍTULO 4. IMPLEMENTACIÓN DEL EMULADOR
4.3
Etapa de potencia
Los motores de CD tienen caracterı́sticas variables, su uso es extenso en aplicaciones de
velocidad variable. Además, pueden proporcionar un alto par motor de arranque y también
permiten obtener control de la velocidad en un amplio intervalo. Los métodos de control
de la velocidad, por lo general son más simples y menos costosos que los de CA.
Hay tres formas distintas para controlar la velocidad en un motor de CD: variando resistencia de campo, variando la resistencia de armadura y variando el voltaje de
armadura-campo. Las dos primeras provocan grandes pérdidas, por esta razón en este
caso se empleará el control variando el voltaje de armadura y campo.
En muchas aplicaciones industriales, es necesario convertir una fuente de CD de
voltaje fijo a una fuente de CD de voltaje variable. Un circuito troceador convierte directamente de CD a CD, por lo que también se conoce como convertidor de CD a CD. Los
troceadores se utilizan ampliamente en el control de los motores de tracción de automóviles
eléctricos, tranvı́as eléctricos, grúas marinas, montacargas y elevadores de minas. Proporcionan control en aceleraciones continuas, una alta eficiencia y una respuesta dinámica
rápida. El voltaje de salida promedio esta dado por la ecuación (4.3) donde D es el ciclo
de trabajo del troceador.
Vo
T1
s
» t1
0
vo dt DVi
(4.3)
Existen dos modos de operación en los circuitos troceadores y son los siguientes:
1. Operación a frecuencia constante. La frecuencia de pulsación fs se mantiene constante variando sólo el tiempo activo t1 . Este tipo de control se conoce como control
de modulación por ancho de pulso (PWM).
2. Operación a frecuencia variable. Varı́a la frecuencia de pulsación fs ya sea el tiempo
activo t1 ó el tiempo inactivo t2 . Esto se conoce como modulación por frecuencia,
la frecuencia debe variarse en un amplio intervalo para obtener todo el intervalo de
salida de voltaje deseado. Este tipo de control generará armónicas a frecuencias no
predecibles lo que provocarı́a contaminación a la red eléctrica [23].
El modo de operación adecuado para esta aplicación debe ser el de operación a
frecuencia constante, debido a que en dado caso que se necesite diseñar los filtros de CA
4.3. ETAPA DE POTENCIA
47
y de CD resulte sencillo el diseño de los mismos.
El modo de conducción adecuado debe ser el modo de conducción continuo (MCC)
ya que generalmente no se diseñan convertidores en alta frecuencia para que operen en
modo de conducción discontinuo (MCD). La razón es que la energı́a pico del inductor y el
estrés de la corriente pico en el dispositivo semiconductor son muy altos, comparados con
los valores en un convertidor operando al mismo nivel de potencia en MCC.
Existen diferentes tipos de convertidores de tipo troceador y se clasifican dependiendo
de la dirección en que fluyan la corriente y el voltaje. En la Figura 4.5 se presentan las
diferentes regiones de operación de los convertidores tipo troceador [23].
vL
vL
VL
0
vL
VL
VL
IL
iL
iL
Clase A
-IL
0
-IL
Clase B
0
Clase C
VL
VL
IL
iL
-IL
0
-VL
Clase D
iL
vL
vL
0
IL
IL
iL
-VL
Clase E
Figura 4.5: Clasificación de los troceadores.
Troceador clase A – La corriente de la carga fluye hacia la carga. Tanto el voltaje
como la corriente son positivos. Este es un troceador de un sólo cuadrante, llamándole
operado como rectificador.
Troceador clase B – La corriente de la carga fluye fuera de la carga. El voltaje de
la carga es positivo, pero la corriente de la carga es negativa. Este también es un troceador
de un sólo cuadrante, pero opera en el segundo cuadrante por lo que se dice que opera
como inversor.
Troceador clase C – La corriente de la carga es positiva ó negativa, el voltaje en
la carga es siempre positivo. Este se conoce como un troceador dos cuadrantes. Se puede
combinar troceadores de clase A y de clase B para formar un troceador de clase C. Un
48
CAPÍTULO 4. IMPLEMENTACIÓN DEL EMULADOR
troceador de clase C puede operarse como rectificador ó como inversor.
Troceador clase D – La corriente en la carga es siempre positiva. El voltaje en la
carga es positivo ó negativo. Un troceador clase D también puede operar como rectificador
ó como inversor.
Troceador clase E – La corriente de la carga puede ser positiva ó negativa. El
voltaje en la carga también puede ser positivo ó negativo. Este se conoce como troceador
de cuatro cuadrantes. Se puede combinar dos troceadores clase C para formar un troceador
clase E [23].
En este caso el motor opera en el primer cuadrante, quiere decir que tanto el voltaje
como la corriente son positivos, por lo tanto se escoge implementar un convertidor troceador clase “A” y el circuito se presenta en la Figura 4.6.
Como complemento de esta sección, en el Anexo B se presenta el listado de los
dispositivos utilizados en la implementación de la etapa de potencia, ası́ como el diagrama
esquemático y la fotografı́a del prototipo.
Io
VCD
Carga
Vo
Figura 4.6: Convertidor troceador clase “A”.
Tanto para enviar las señales de control al circuito troceador como para realizar
todo el procesamiento3 del sistema emulador se requiere una plataforma lo suficientemente
poderosa. En la sección 4.4 se presenta la tarjeta utilizada en la implementación de esta
tesis y se resaltan sus ventajas respecto a otra familia que se encuentra disponible al
momento de realizar la investigación.
3
Si se habla de “todo el procesamiento” se refiere al procesamiento del modelo, la adquisición de las
señales, el control del motor de CD y el envı́o de las señales de control al circuito troceador; todo lo realiza
la tarjeta eZdspF2812.
4.4. PLATAFORMA DSC
4.4
49
Plataforma DSC
De acuerdo a la literatura que se revisó se detectó que la mayorı́a de los grupos de trabajo
utilizan plataformas DSP para llevar a cabo la implementación de sus emuladores. En
gran parte se debe al poder de procesamiento de señales digitales, y es por la misma razón
que en este trabajo se elige una basada en DSP, para implementar el emulador de turbina
eólica.
4.4.1
Selección de la plataforma DSC
Por la amplia diversidad de plataformas DSP en el mercado, la búsqueda se reduce al
fabricante TI debido a que tiene familias optimizadas para el control de motores y se
encuentran disponibles fı́sicamente en CENIDET. En el momento de realizar la implementación se encontraban disponibles dos familias del fabricante TI, la TMS320C2000 y
la TMS320C6000.
A la familia C2000 se hace referencia como DSP’s orientados a control, se emplean en
sistemas industriales, control de motores, fuentes de alimentación, automóviles, sistemas
médicos, por mencionar algunos.
Combina la integración de periféricos con un uso fácil, a estos DSP’s también se le
llaman DSC’s (controlador digital de señales) por su similitud a los microcontroladores.
Este es un nuevo tipo de microcontrolador, ya que combina en un dispositivo el poder de
procesamiento de un DSP, con periféricos usados en los sistemas de control como: puertos
de comunicación, convertidores analógico-digital (AD), temporizadores, moduladores de
ancho de pulso (PWM), tal como los periféricos que contiene un microcontrolador.
La familia C6000 a la cual se hace referencia como DSP’s de alto desempeño, cuenta
con altas velocidades y mayor paralelismo en el procesamiento. Presenta subdivisiones
para aplicaciones especı́ficas como interfaces con computadoras, internet, multimedia, pero
también como atmósfera de desarrollo estándar para la industria.
Es la de mayor capacidad de procesamiento, con frecuencias de operación hasta de
1GHz. Cuentan con escasos pines de propósito general, en su lugar, tienen una interfaz
paralela de entrada-salida para la interconexión con otros dispositivos [24].
Las caracterı́sticas principales de las plataformas (TMS320C2000) y (TMS320C6000)
se resumen en la Tabla 4.3.
50
CAPÍTULO 4. IMPLEMENTACIÓN DEL EMULADOR
La columna izquierda corresponde a la familia orientada a control y se presentan las
plataformas (TMS320C24x, TMS320C28x), y la columna de la derecha a las de alto desempeño (TMS320C62(67)x, TMS320C6410(13)x). Para seleccionar a la familia adecuada
se debe tomar en cuenta el proceso para el cual se requiere utilizar el DSC [24].
Bus fı́sico
Frecuencia
de operación
Comunicación
sı́ncrona
Comunicación
ası́ncrona
Comunicación
especializada
ADC
Tabla 4.3: Comparación de las familias C2000 y C6000.
DSP’s dedicados a control
DSP’s de alto desempeño
TMS320C24x
TMS320C28x
TMS320C62(67)x
TMS320C6410(13)x
16bits
32bits
32bits
32bits
40Mhz
100Mhz y 150Mhz 200Mhz a 300Mhz
400Mhz a 720Mhz
SPI a 10Mbps
SPI a 37Mbps
McBSP a 100Mbps
McBSP a 125Mbps
SCI a 2.5Mbps
SCI a 9.3Mbps
McBSP a 9.3Mbps
McBSP a 11.25Mbps
CAN
CAN 2.0
HPI
HPI
12bits, 200ns de
conversión,
(disminuye
según el número
de muestras),
16 canales
multiplexados,
2 muestreos
simultáneos
3-32 bits, con
Temporizadores 2-16 bits, con
manejador de
manejador de
eventos que
eventos que
permite generar permite generar
PWM’s desde
PWM’s desde
hardware
hardware
Hasta 56 pines
Interfaz I/O
Hasta 41 pines
de propósito
de propósito
general
general
organizados en
organizados en
puertos
puertos
Conjunto de
RISC
instrucciones
Multiplicadores
1,1
y ALU’s
Formato de
Punto fijo
números
Memoria RAM
2.5kB-5kB
20kB-40kB
en el chip
10bits, 375ns de
conversión, 16
canales
multiplexados,
1 muestreo
simultáneo
no se inluye
2-32 bits, sin
manejador de
eventos, los
PWM’s
requieren
software
EMIF de 32 bits
3-32 bits, sin
manejador de
eventos, los
PWM’s
requieren
software
EMIF de 64 bits
VLIW
2,6
Punto fijo
(punto flotante)
72kB-896kB
Punto fijo
160kB-544kB
4.4. PLATAFORMA DSC
51
Por tanto, de acuerdo a las caracterı́sticas que presenta cada una de ellas se opta por
trabajar con la familia C2000 que está optimizada para el control de motores. En particular, con la plataforma de desarrollo eZdspF2812 presentada en la Figura 4.7 que aparte de
las caracterı́sticas antes mencionadas, permite su programación en MATLAB/SIMULINK.
En la siguiente sección se explicará como se realiza la programación de la tarjeta en
MATLAB/SIMULINK.
Figura 4.7: Plataforma eZdspF2812 de TI.
4.4.2
Programación de la eZdspF2812 en
MATLAB/SIMULINK
Una caracterı́stica importante que se busca en la implementación del emulador de turbina
eólica es que el sistema a implementar debe ser robusto y de fácil manejo para el usuario.
Lo anterior es necesario debido a que si se requiere hacer algún cambio en cualquiera de los
parámetros del modelo de la turbina, ganancias de los controladores ó del perfil de viento
aplicado, cualquier usuario pueda hacerlo sin necesidad que éste sea experto en el tema,
y esto se logra con MATLAB/SIMULINK que es un software poderoso y de uso común
entre estudiantes.
La herramienta de SIMULINK que permite la implementación del emulador de
turbina eólica en la tarjeta eZdspF2812 es la Embedded Target for TI C2000 DSP, que
integra MATLAB/SIMULINK con las herramientas eXpressDSP de TI.
52
CAPÍTULO 4. IMPLEMENTACIÓN DEL EMULADOR
El Embedded Target for TI C2000 DSP utiliza la herramienta Real-Time Workshop
(RTW) para automáticamente generar, empaquetar y compilar el código fuente del modelo
SIMULINK, creando aplicaciones de software en tiempo real en una variedad de sistemas;
RTW compila un proyecto Code Composer Studio (CCS) a partir del código C generado
del modelo SIMULINK. Para ilustrar el proceso anterior se presenta un diagrama de flujo
en la Figura 4.8.
SIMULINK Y RTW
Concepto
Embedded Target for TI C2000
Link for Code Composer Studio
Code Composer Studio
Implementación
eZdspF2812
Figura 4.8: Diagrama de flujo para implementación del modelo SIMULINK.
Como puede observarse en el primero y segundo nivel del diagrama de flujo se encuentra SIMULINK, RTW y la Embedded Target for TI C2000 DSP ; ahı́ se implementa
un modelo en tiempo discreto ya que el RTW no soporta bloques en tiempo continuo y se
configuran los periféricos que se requieran para llevar a cabo la implementación.
En el tercer nivel se encuentra el Link for CCS que permite usar funciones de MATLAB para comunicarse con el CCS y con información almacenada en memoria y en registros
del DSC. En el penúltimo nivel se encuentra el CCS que es el compilador por defecto de
TI y que utiliza el RTW para generar el código ejecutable para el DSC. En la parte más
baja se encuentra la aplicación final donde se descarga el código ejecutable [25].
La implementación del emulador de turbina eólica en MATLAB/SIMULINK se presenta en la Figura 4.9, donde el bloque del control de velocidad que puede observarse
corresponde al esquema presentado en la Figura 4.4, el modelo estático de la turbina
eólica corresponde al presentado en la sección 3.3.1 y el modelo dinámico al de la sección
3.3.2 (caso II) pero con la diferencia que aquı́ se encuentra en tiempo discreto.
4.4. PLATAFORMA DSC
53
From RTDX
ichan1
COMUNICACIÓN
RTDX
Vw
[Wr]
Unbuffer
Wr
[Wr]
TM
[Wg]
B
0
BETA
MODELO
DINÁMICO
DISCRETO
MODELO
ESTATICO
DISCRETO
eZdspF2812
[Wg]
WREF
RTDX
To RTDX
ochan1
Al RTDX
CONTROL DE VELOCIDAD
DISCRETO
Figura 4.9: Implementación del modelo SIMULINK para la tarjeta eZdspF2812.
Existen dos bloques nuevos en el esquema de la Figura 4.9 uno indica la plataforma
que se está usando, en este caso la tarjeta eZdspF2812 y el otro bloque sirve para obtener
la comunicación en tiempo real4 entre MATLAB y el proceso ejecutándose en la tarjeta,
a esta herramienta se le conoce como RTDX.
La herramienta RTDX se utiliza para enviar el vector de datos que contiene la información del perfil de viento utilizado (Figura 5.1) y para adquirir la velocidad en el eje
del generador.
Los datos que se envı́an y se reciben son almacenados en un vector de datos en
el espacio de trabajo de MATLAB, la configuración básica para poder realizar la implementación se encuentra en el Anexo C en el se presenta una guı́a rápida paso a paso para
la puesta en marcha de la tarjeta eZdspF2812 de TI. El listado utilizado para configurar
la herramienta RTDX se encuentra en el Anexo A, sı́ se requieren mayores detalles revisar
la referencia [25].
4
En este trabajo se le considera que está en “tiempo real” el intercambio de datos entre la tarjeta
eZdspF2812 y el espacio de trabajo en MATLAB, lo anterior derivado del nombre en inglés (Real Time
Data Exchange) de la herramienta de comunicación de MATLAB, RTDX.
54
CAPÍTULO 4. IMPLEMENTACIÓN DEL EMULADOR
4.4.3
Acondicionamiento de señales
Los ADC’s del DSC tienen un intervalo de lectura entre 0V y 3V , el sensor de corriente
(CSLA2CD) que se utiliza para el circuito de armadura entrega una señal de 0V a 5V con
el cero en 2.5V . Es decir, el sensor mide corrientes negativas y el valor es representado
entre 0V y 2.5V .
Ya que no interesa sensar corrientes negativas, se debe ajustar esa señal utilizando el
amplificador de instrumentación INA128 conectado como restador; moviendo entonces el
cero del sensor de 2.5V a 0V , de ese modo se ajusta el sensor CSLA2CD para que pueda
operar en el mismo intervalo que el ADC de la tarjeta eZdspF2812.
Para sensar la velocidad en el eje de la MIDA se utiliza el sensor de velocidad
disponible en el sistema del fabricante de DE LORENZO. Nuevamente se debe ajustar el
intervalo de medición que entrega que es de 0V a 6V , para ello se utiliza el amplificador
OPA2241 conectado como seguidor, con una ganancia en la entrada de k 0.5. El
diagrama esquemático del acondicionamiento de señal se presenta en la Figura 4.10.
Figura 4.10: Diagrama esquemático para el acondicionamiento de señal.
Capı́tulo
5
Análisis de resultados
En este capı́tulo se analizan los resultados obtenidos experimentalmente en el laboratorio
de máquinas eléctricas de CENIDET a partir del sistema descrito por el diagrama de
bloques presentado en la Figura 4.1.
En la sección 3.5.2 se presentó el acoplamiento en simulación entre el modelo de
la turbina eólica y el modelo del sistema de generación de energı́a. De manera experimental también se acoplan ambos sistemas; sin embargo, el desarrollo de este trabajo
de tesis únicamente contempla la implementación en laboratorio del sistema emulador de
turbina eólica. Tomando entonces la implementación experimental existente del sistema
de generación de energı́a desarrollada en la referencia [1].
Por esta razón, se enfatizan los resultados experimentales obtenidos del sistema emulador, y únicamente se reproducen los del sistema de generación de energı́a para comprobar
que ambos sistemas están funcionando de manera conjunta.
El capı́tulo 5 se encuentra dividido en tres secciones: en la sección 5.1 se presentan las
condiciones y caracterı́sticas que tiene el perfil de viento utilizado en la implementación realizada. En la sección 5.2 se presentan y comentan los resultados experimentales obtenidos
del sistema emulador y del sistema de generación eléctrica. Finalmente, en la sección 5.3,
se presenta un análisis del ı́ndice de desempeño ó comportamiento del sistema emulador
de turbina eólica.
55
56
CAPÍTULO 5. ANÁLISIS DE RESULTADOS
5.1
Perfil de viento
Una de las limitantes de la referencia [1] se presenta en la velocidad que transmite el
motor de CD al eje de la MIDA. Lo anterior se realiza manualmente, impidiendo obtener
el comportamiento de una turbina eólica real como si la estuviera impulsando el viento.
Entre los alcances de este trabajo de tesis está el implementar un emulador que sea
capaz de aceptar perfiles de viento reales (está tarea ya se realizó en su totalidad). Para
ello, se investigó qué instituciones en México se dedicaban a realizar la medición del recurso
natural del viento. Y resultó que el Instituto de Investigaciones Eléctricas (IIE) cuenta
con una gerencia de energı́as no-convencionales y dentro de esa gerencia se encuentra la
rama eólica, esta última dedicada a la medición del recurso natural.
El IIE cuenta con una base de datos donde se encuentra disponible la información
de las mediciones anemométricas1 . Estas mediciones provienen de las diferentes estaciones
de medición instaladas a lo largo de la República Mexicana. En la Tabla 5.1 se presentan
los sitios en donde el IIE cuenta con estaciones de medición.
Tabla 5.1: Lugares que son evaluados por el IIE
Lugar
La Venta, Juchitán
La Ventosa, Juchitán
Cerro Pelón, Singuilucan
Cd. Cuauhtémoc, Chihuahua
Samalayuca, Cd. Juárez
Alchichica, Tepeyahualco
Perote, Perote
Punta Delgada, Alto Lucero
Sisal, Hunucmá
Cieneguillas, Zacatecas
Los Naranjos, La Pesca
Francisco Villa, San Fernando
Estado
Oaxaca
Oaxaca
Hidalgo
Chihuahua
Chihuahua
Puebla
Veracruz
Veracruz
Yucatán
Zacatecas
Tamaulipas
Tamaulipas
Estación
LV01
OA01
HG01
CH01
CH02
PB01
VZ01
VZ02
YC01
ZC01
TM01
TM02
La evaluación del recurso eólico se realiza con base en recomendaciones internacionales que indican que el dato que se debe adquirir es el promedio en 10min, a partir de
muestras cada 2s como mı́nimo [26]. En el ámbito internacional, la velocidad promedio en
10min se considera como la “velocidad estacionaria” ya que es la que afecta los cambios
1
Medición de la velocidad del viento y almacenamiento en un vector de datos.
5.1. PERFIL DE VIENTO
57
de potencia en la salida de una turbina.
Es decir, se considera que los cambios de velocidad en intervalos menores, debido
al gran tamaño del rotor2 de éstas máquinas, no influyen sobre el desempeño dinámico
en potencia vs velocidad del viento y que los cambios de velocidad en intervalos menores
únicamente influyen en las cargas dinámicas sobre el rotor y en general en la estructura.
El IIE realiza arreglos de los datos adquiridos mediante archivos EXCEL, en donde
el significado de cada columna lo podemos descifrar gracias a la Tabla 5.2.
Columna
A
B
C
D
E
F
G
H
I
Tabla 5.2: Arreglos de datos crudos adquiridos por el IIE
Dato
Unidades
Comentarios
3
Dı́a juliano
Número
Consecutivo del año
consecutivo
Hora y minutos
(hhmm)
Al final del perı́odo
Valor promedio de la velocidad del
(m{s)
Obtenida de muestras cada 2s
viento a 15m de altura
Dirección dominante del viento
(Grados)
Medidos a partir del norte en el
sentido de las manecillas del reloj
Desviación estándar de la velocidad
(m{s)
Obtenida de muestras cada 2s
del viento a 15m de altura
Velocidad máxima del viento a 15m
(m{s)
Valor máximo del conjunto de
de altura
muestras cada 2s
Valor promedio de la velocidad del
(m{s)
Obtenida de muestras cada 2s
viento a 32m de altura
Desviación estándar de la velocidad
(m{s)
Obtenida de muestras cada 2s
del viento a 32m de altura
Velocidad máxima del viento a 32m
(m{s)
Valor máximo del conjunto de
de altura
muestras cada 2s
Para el experimento realizado en esta tesis se selecciona el perfil de viento correspondiente a La Venta, Oaxaca, ya que las con las evaluaciones del recurso eólico se ha
establecido que las condiciones eólicas en el Istmo de Tehuantepec son de las mejores a
nivel mundial. En Oaxaca hay zonas con velocidades del viento medidas a 50m de altura
superiores a 8.5m{s [27].
2
El tamaño del rotor está relacionado con la masa y con la inercia del mismo, a mayor tamaño mayor
inercia y mayor masa.
3
Cada uno de los dı́as contados ininterrumpidamente desde las doce horas del dı́a el 1 de enero de 4713
AC hasta la fecha actual.
58
CAPÍTULO 5. ANÁLISIS DE RESULTADOS
Perfil de viento de La Venta, Juchitán (Enero 2006)
40
35
Velocidad del viento m/s
30
25
20
15
10
Perfil de viento
remuestreado
5
0
0
0.5
1
1.5
2
2.5
3
3.5
Escala de tiempo 0 a 31 días ó 0 to 44640min
4
4.5
4
x 10
Figura 5.1: Perfil de viento real, La Venta (Enero-06).
En la Figura 5.1 se presenta el perfil de viento correspondiente al mes de Enero
(duración de 744Hrs) de 2006 en La Venta, Oaxaca. El perfil de viento presentado corresponde a la columna “G” de la Tabla 5.2, qué es el valor promedio de la velocidad del
viento a 32m de altura.
Del mismo modo que se selecciona la columna “G” para realizar el experimento en el
laboratorio, también se pudieron seleccionar cualesquiera de las columnas restantes (“C”,
“F” e “I”). Sin embargo, se prefirió seleccionar la columna “G” ya que por ser la medición a
32m de altura se obtiene una mayor cantidad de viento y como el vector de datos contiene
el promedio de las muestras durante 10min el perfil presentará menos variación que el
contenido de las otras columnas.
Se omiten las gráficas de las columnas “D”, “E”, y “H” ya que no se considera que
contengan alguna aportación relevante para este trabajo de tesis.
En la siguiente sección se presentan los resultados experimentales obtenidos de la implementación realizada en el laboratorio de máquinas eléctricas de CENIDET, en dónde
se incluyen las pruebas del sistema emulador y del sistema de generación eléctrica funcionando ambos de manera conjunta.
5.2. RESULTADOS EXPERIMENTALES
5.2
59
Resultados experimentales
Dadas las caracterı́sticas de la turbina eólica que se emula en este trabajo de tesis (Tabla
3.1), el perfil de viento no es el adecuado, ya que la dinámica de la turbina es mucho más
rápida que la del perfil real adquirido por el IIE, cuyas caracterı́sticas son adecuadas para
turbinas eólicas grandes, es decir, en el orden de los Kilowatts y más.
Por lo tanto, se debe muestrear el perfil real de 744Hrs y con una razón de muestreo
de cada 10min (600s), a una razón más rápida (cada 5s), para observar el comportamiento
de la dinámica del sistema. Para acortar la duración del experimento únicamente se
remuestrea el área punteada de la Figura 5.1, resultando finalmente una nueva escala de
tiempo de 1Hr, que es la duración de la prueba realizada en el laboratorio.
Ya con el perfil de viento remuestreado4 (1Hr de duración), se realiza una simulación
con el modelo implementado en MATLAB/SIMULINK (Figura 4.9) y se realiza una prueba
en laboratorio, ambos resultados se presentan en la Figura 5.2.
Velocidad simulada VS Velocidad real
5000
Velocidad en el eje de alta rpm
4500
4000
3500
3000
2500
2000
1500
1000
500
0
0
500
1000
1500
2000
2500
3000
3500
Escala de tiempo 0 a 3600s
Figura 5.2: Velocidad en el eje de alta velocidad (REALvsSIMULADA).
4
El perfil de viento remuestreado es el área punteada de la Figura 5.1.
60
CAPÍTULO 5. ANÁLISIS DE RESULTADOS
En la Figura 5.2 se puede observar la velocidad del eje de alta, tanto del modelo
(lı́nea punteada) como del sistema emulador (lı́nea en negrita). Con la escala de tiempo
presentada a simple viste se podrı́a decir que el resultado es excelente, sin embargo mediante ciertos análisis que se presentan en la sección 5.3 se verá que existe cierto error debido
a diversos factores, y pesar del error el resultado obtenido seguirá siendo satisfactorio.
Como se mencionó en la sección 4.1, el vector de datos que contiene el perfil de
viento se encuentra en el espacio de trabajo de MATLAB. Éste a su vez funge como una
de las entradas del modelo de la turbina y es enviado a la tarjeta eZdspF2812 mediante la
herramienta de comunicación RTDX (en el Anexo A se presenta un algoritmo que configura
la herramienta RTDX y arranca el sistema), esta tarjeta se encuentra conectada al PC
por el puerto paralelo. En el Anexo C se presenta en forma un poco más detallada el
funcionamiento de la tarjeta.
Para adquirir el vector de datos de la velocidad del eje del generador ó eje de alta
y graficarlo en la Figura 5.2 se utiliza la misma tarjeta eZdspF2812, siendo esta la única
herramienta disponible para adquirir los datos de la prueba cuya duración es de 1Hr.
Se adquiere cada dato almacenado en la memoria de la tarjeta mediante la herramienta de comunicación RTDX y se guarda en el espacio de trabajo de MATLAB en forma
de vector, para que sea procesado posteriormente.
Se presenta una acercamiento5 en la Figura 5.3 para observar el error en una escala
de tiempo menor, el resultado obtenido es satisfactorio (en la sección 5.3 se analiza el
desempeño del sistema).
Puede observarse en esta nueva escala de tiempo que el sistema a simple vista ya
no presenta carácter de “excelente”, como se habı́a apreciado anteriormente con la escala mayor. La lı́nea punteada indica la velocidad de referencia obtenida a partir de la
simulación y la lı́nea en negrita indica la velocidad real adquirida mediante la tarjeta
eZdspF2812.
5
El acercamiento corresponde al intervalo comprendido entre 2100s y 2300s de la Figura 5.2
5.2. RESULTADOS EXPERIMENTALES
61
Velocidad simulada VS Velocidad real
5000
Velocidad en el eje de alta rpm
4800
4600
4400
4200
4000
3800
3600
3400
3200
3000
2100
2120
2140
2160
2180
2200
2220
2240
2260
2280
2300
Escala de tiempo 2100 a 2300s
Figura 5.3: Acercamiento de la Figura 5.2.
La siguiente prueba consistió en poner en funcionamiento ambos sistemas6 , se propuso un perfil que provocara el paso de la velocidad subsı́ncrona a la supersı́ncrona y
viceversa; Figura 5.4(a) y 5.4(b) respectivamente.
En el cambio de velocidad subsı́ncrona a supersı́ncrona se obtiene el comportamiento
detallado de la tensión generada en el estator y de la corriente inyectada en el devanado
del rotor. En el cambio de velocidad supersı́ncrona a subsı́ncrona permite observar el
seguimiento del control ante cambios de velocidad en sentido opuesto.
El cambio de fases de la corriente del rotor para cambios de velocidad por abajo y
por arriba de la velocidad sı́ncrona, comprueban la operación del banco de pruebas similar
al presentado en simulación, esto se puede apreciar en la Figura 5.4. El objeto de presentar
esta figura se debe a que se quiere mostrar que ambos sistemas se encuentran acoplados y
funcionando, sin embargo para mayores detalles se debe consultar la referencia [1].
6
Sistema de generación eléctrica y sistema emulador.
62
CAPÍTULO 5. ANÁLISIS DE RESULTADOS
(a) Paso de velocidad subsı́ncrona a supersı́ncrona.
(b) Paso de velocidad supersı́ncrona a subsı́ncrona.
Figura 5.4: Operación del del sistema durante las transiciones
5.3
Desempeño del sistema emulador
En esta sección se presenta la valoración cuantitativa de las bondades del sistema emulador de turbina eólica mediante el ı́ndice de desempeño ó comportamiento y mediante la
desviación estándar. En el diseño de un sistema de control, es importante que el sistema
cumpla con las especificaciones de comportamiento deseadas.
5.3.1
Índice de desempeño del sistema emulador
Como los sistemas de control son dinámicos, se puede evaluar su comportamiento en
función de términos de respuesta transitoria ante determinadas entradas, tales como escalón, rampa y otras; ó se pueden dar especificaciones en términos de un ı́ndice de desempeño ó comportamiento.
Un ı́ndice de desempeño es un número que indica el grado de beneficio del sistema,
es decir, es una medida cuantitativa del desempeño que señala la desviación respecto al
comportamiento ideal. La evaluación de un sistema se puede considerar aceptable si los
valores de los ı́ndices de desempeño son un mı́nimo ó un máximo, según el caso.
Los requerimientos de los ı́ndices de desempeño deben:
brindar selectividad, es decir, un ajuste óptimo de los parámetros que se distingue
claramente de los ajustes que no son óptimos,
presentar un único valor numérico positivo ó cero, este último se obtiene sı́ y solamente sı́ la medida de desviación es idénticamente cero,
5.3. DESEMPEÑO DEL SISTEMA EMULADOR
63
ser una función de los parámetros del sistema y debe presentar un máximo ó un
mı́nimo,
ser fácilmente calculables, en forma analı́tica ó mediante computadora.
Sea un sistema de control cuya salida deseada sea r ptq y salida real sea c ptq, el error
e ptq se define como:
e ptq r ptq c ptq
(5.1)
En la literatura se han propuesto varios ı́ndices de desempeño basados en el error,
que son integrales de alguna función de la salida del sistema en sı́, con la entrada deseada.
Los ı́ndices de desempeño más comúnmente utilizados son la Integral Absoluta del Error
(IAE) y la Integral del Tiempo por el valor Absoluto del Error (ITAE) cuyas formulas son:
IAE
IT AE
»t
0 |e ptq| dt
»t
0
t |e ptq| dt
(5.2)
(5.3)
Un sistema evaluado con el criterio IAE es un sistema con amortiguamiento razonable
y con caracterı́stica satisfactoria de respuesta transitoria. Sin embargo, este ı́ndice de
desempeño no se puede evaluar fácilmente por medios analı́ticos.
Por otro lado, en el sistema evaluado con el criterio ITAE, un error inicial grande en
la respuesta transitoria pesa poco y los errores que se presentan más tarde son penalizados
severamente. El sobreimpulso en la respuesta transitoria es pequeño, las oscilaciones son
bien amortiguadas y posee buena selectividad [28]-[29].
A continuación se presentan los resultados obtenidos aplicando los ı́ndices de rendimiento al sistema emulador. En la Figura 5.5(a) se presenta el error absoluto de ambas
señales donde se puede observar que el error máximo es de 1000rpm aproximadamente.
El error se evalúo durante 1Hr el mismo tiempo que dura la prueba en el laboratorio.
En la Figura 5.5(b) y en la Figura 5.5(c) se presentan las gráficas de los ı́ndices de
rendimiento del sistema emulador, el IAE y el ITAE respectivamente. En estas gráficas se
puede observar la tendencia del error a permanecer constante. En la Tabla 5.3 se presentan
los ı́ndices numéricamente y se puede observar que el IAE es de 40.86 rpm
mientras que el
hr
64
CAPÍTULO 5. ANÁLISIS DE RESULTADOS
ITAE es de 70392.22 rpmhrseg .
Tabla 5.3: Índices de desempeño IAE e ITAE evaluados numéricamente
IAE
40.86 rpm
hr
ITAE
70392.22 rpmhrseg
Error absoluto entre la velocidad deseada y la real
1500
Error en rpm
1000
500
0
0
500
1000
1500
2000
2500
3000
3500
Escala de tiempo 0 a 3600s
(a) Error absoluto eptq
IAE entre la velocidad deseada y la real
4
15
x 10
ITAE entre la velocidad deseada y la real
8
3
x 10
2.5
10
rpm
rpm
2
5
1.5
1
0.5
0
0
500
1000
1500
2000
2500
3000
Escala de tiempo 0 a 3600s
(b) Índice de desempeño IAE.
3500
4000
0
0
500
1000
1500
2000
2500
3000
Escala de tiempo 0 a 3600s
(c) Índice de desempeño ITAE.
Figura 5.5: Índices de desempeño del sistema emulador
3500
4000
5.3. DESEMPEÑO DEL SISTEMA EMULADOR
5.3.2
65
Desviación estándar del sistema emulador
Para definir la desviación estándar, que por mucho es la medida de variación usada con
mayor frecuencia, primero se debe comenzar definiendo la “media”, que es la medida más
popular de la tendencia central y lo que los estadistas llaman media aritmética, esta se
define como sigue: La media aritmética o promedio, de una cantidad finita de números, es
igual a la suma de todos ellos dividida entre el número de sumandos (ecuación 5.4).
x̄ °
x
n
(5.4)
La desviación estándar es una medida del grado de dispersión de los datos de la
media. Dicho de otra manera, la desviación estándar es simplemente la variación esperada
respecto a la media aritmética y por tanto, se mide en las mismas unidades que la variable.
Para conocer con detalle un conjunto de datos, no basta con conocer las medidas de
tendencia central, sino que necesitamos conocer también la desviación que representan los
datos en su distribución, con objeto de tener una visión de los mismos más acorde con la
realidad a la hora de describirlos e interpretarlos para la toma de decisiones.
Una desviación estándar grande indica que los puntos están lejos de la media, y una
desviación pequeña indica que los datos están agrupados cerca de la media. La ecuación
5.5 expresa la desviación estándar [30].
s
g
f°
f
e
px x̄q2
n1
(5.5)
Por lo tanto se utiliza el criterio de la desviación estándar para evaluar qué tanta
variación tiene el sistema real contra la simulación y ası́ determinar qué “tan bueno” es el
sistema desarrollado. Aplicando las ecuaciones 5.4 y 5.5 a las gráficas presentadas en la
Figura 5.2 se obtiene la Tabla 5.4 con los valores para la media y la desviación estándar.
Tabla 5.4: Desviación estándar para gráfica de la Figura 5.2
Señal
Media
Deseada
2518.9
Desviación
estándar
1176.4
Real
2532
1174.8
Diferencia
1.6
66
CAPÍTULO 5. ANÁLISIS DE RESULTADOS
Mediante la tabla anterior se puede observar que tanto la media como la desviación
estándar en ambos sistemas (real y simulado) son bastante similares, obteniendo una
diferencia de apenas 1.6rpm para la desviación estándar. Lo anterior suena algo anormal
ya que si observamos la Figura 5.3 a simple vista se nota que la desviación deberı́a ser
mayor.
Sin embargo, el cálculo de la desviación estándar se realizó para todo el conjunto de
muestras obtenido a partir de la prueba de 1Hr realizada en el laboratorio de máquinas
eléctricas. Por lo tanto, para el total de la prueba se obtiene un resultado satisfactorio.
Para corroborar lo anteriormente mencionado se presenta un acercamiento de la
prueba realizada, en donde se presenta un mayor error entre ambas señales (Figura 5.6).
El cálculo de la desviación estándar se realiza en una escala de apenas 120s.
Velocidad simulada VS Velocidad real
1900
Velocidad en el eje de alta rpm
1800
1700
1600
1500
1400
1300
1200
400
420
440
460
480
500
520
Escala de tiempo 400s a 520s
Figura 5.6: Acercamiento de la Figura 5.2 para el calculo de la desviación estándar.
En la Tabla 5.5 se presentan los valores de la media y la desviación estándar calculados a partir de la gráfica presentada en la Figura 5.6. Se puede observar que ahora la
diferencia es mayor 9rpm, lo que ı́ndica un peor ajuste y se puede observar claramente en
la Figura 5.6.
Para concluir, se puede decir que de todo el conjunto de muestras obtenidas durante
5.3. DESEMPEÑO DEL SISTEMA EMULADOR
67
la prueba realizada en el laboratorio, la mayorı́a ajustan de mejor manera con la referencia,
obteniendo ası́ un buen desempeño del sistema.
Tabla 5.5: Desviación estándar para gráfica de la Figura 5.6
Señal
Media
Deseada
1567.9
Desviación
estándar
150.705
Real
1570.7
141.70
Diferencia
9
68
CAPÍTULO 5. ANÁLISIS DE RESULTADOS
Capı́tulo
6
Conclusiones y
trabajos futuros
6.1
Conclusiones
Hoy en dı́a el estudio y el mejoramiento de la generación de energı́as alternas se encuentra
en crecimiento continuo a nivel mundial. Con la creciente demanda de energı́a a la red
eléctrica y con los altos niveles de contaminantes producidos por la generación mediante
combustibles fósiles, es necesario desarrollar tecnologı́a que contribuya con el estudio y
mejoramiento de la generación de energı́as alternas.
Por tanto, el trabajo desarrollado en esta tesis contribuye con el reto del estudio de
la generación de energı́as alternativas que se tiene actualmente a nivel mundial. Particularmente estudia la generación eólica, permitiendo realizar estudios en zonas donde no se
tenga el recurso natural del viento.
Con el desarrollo, análisis e investigación de este trabajo de tesis se válida la propuesta de solución1 planteada al inicio del trabajo de tesis, ya que sı́ es posible reproducir
el comportamiento de una turbina eólica real mediante el uso de un motor de CD (Figura
5.2), controlado mediante una estructura de control tipo PI (Figura 4.4) e impulsado por
dos convertidores tipo troceador (Figura B.2).
Se lograron dos de los principales alcances propuestos inicialmente:
1
Como propuesta de solución se propone diseñar e implementar experimentalmente un emulador de
turbina eólica que permita reproducir perfiles de viento reales mediante el uso de un motor de CD.
69
70
CAPÍTULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
la implementación en simulación del modelo del sistema completo de generación
eléctrica, incluyendo el emulador de turbina eólica en MATLAB/SIMULINK, y el
desarrollo de
un emulador de turbina eólica que permita reproducir el comportamiento de una
turbina ante perfiles de viento reales.
De las etapas que conforman el sistema emulador, el motor de CD que emula el
comportamiento de una turbina eólica opera satisfactoriamente en ambas zonas (nominal
y de debilitamiento). En el laboratorio de máquina eléctricas de CENIDET fue posible
operar el emulador con una dinámica mucho más rápida de la que normalmente se presenta
en las turbinas reales y a pesar de la mala calidad del sensor de velocidad se logra un
seguimiento aceptable de la referencia de velocidad. Esto se puede verificar mediante los
ı́ndices de desempeño en la sección 5.3.
Para optimizar el tiempo de la prueba se remuestrea el perfil de viento medido por
el Instituto de Investigaciones Eléctricas en La Venta, Oaxaca durante el mes de Enero de
2006. Tanto el perfil como las caracterı́sticas de la turbina eólica (Tabla 3.1) corresponden
a un sistema con una dinámica mayor al que normalmente ofrecerı́a un sistema real del
orden de los Kilowatts ó más.
Finalmente, se enlistan las aportaciones que ofrece este trabajo de tesis; algunas de
ellas fueron pensadas y buscadas desde el inicio del trabajo, pero otras simplemente se
dieron naturalmente debido a la relevancia que tiene actualmente el tema de investigación.
Se completa el banco de pruebas disponible en el laboratorio de máquinas eléctricas
de CENIDET, con un emulador de turbina eólica y se aumenta la capacidad mediante
un motor de CD de suficiente potencia.
La implementación realizada en este trabajo (utilizando la tarjeta eZdspF2812 y
MATLAB/SIMULINK) es la primera realizada en CENIDET y en la literatura revisada a la fecha.
Se genera un artı́culo y se acepta para su publicación en el congreso internacional
Power Electronics Specialist Conference (PESC’07) para celebrarse en la ciudad de
Orlando, Florida, USA.
6.2. TRABAJOS FUTUROS
71
De lo anterior se puede concluir que los resultados obtenidos cumplen con las metas
y objetivos fijados al inicio del trabajo de investigación. En la siguiente sección se presentarán los posibles trabajos futuros, propuestos gracias a la experiencia obtenida a partir
del desarrollo de esta tesis.
6.2
Trabajos futuros
Los posibles trabajos futuros que se proponen en base a lo observado durante el desarrollo
de este trabajo de tesis se enlistan a continuación:
realizar un escalamiento en potencia del banco de pruebas actual; aumentar la potencia del motor de CD, la MIDA y la carga
re-implementar todo el sistema completo mediante el uso de la tarjeta eZdspF2812,
englobando el sistema emulador de turbina eólica y el sistema de generación de
energı́a basado en la máquina de inducción doblemente alimentada MIDA; ó bien
buscar otra alternativa de implementación, por ejemplo un Field Programable Gate
Array (FPGA) por sus siglas en inglés
implementar el sistema de generación con la posibilidad de conectarlo a la red de
distribución
completar el banco de pruebas con el convertidor del lado de la red Grid Side Converter (GSC) por sus siglas en inglés y optimizar el convertidor back-to-back de
acuerdo a la potencia del sistema de generación
implementar diferentes tipos de controladores para la MIDA una vez que todo lo
anteriormente mencionado este optimizado y se encuentre disponible para trabajar
72
CAPÍTULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
Referencias
[1] J. Rodrı́guez, “Diseño e implementación de un sistema aislado de generación eléctrica
basado en un convertidor back-to-back,” Tesis de Maestrı́a, CENIDET, Cuernavaca,
Mor, junio 2005.
[2] J. G. Slootweg, H. Polinder, and W. Kling, “Dynamic modelling of a WT with a
DFIG,” Power Engineering Society Summer Meeting, vol. 1, pp. 644–649, July 2001.
[3] J. G. Slootweg, H. Polinder, and W. K., “Initialization of wind turbine models in
power system dynamics simulations,” Power Tech Proceedings, vol. 4, p. 6, Sept.
2001.
[4] B. Rabelo, W. Hofmann, and M. Gluck, “Emulation of the static and dynamic behavior of a wind turbine with a dc machine drive,” PESC, vol. 3, pp. 2107–2112, June
2004.
[5] H. M. Kojabadi, L. Chang, and T. Boutot, “Development of a novel wind turbine
simulator for wind energy conversion systems using an inverter-controlled induction
motor,” IEEE Transactions on Energy Conversion, vol. 19, pp. 547–552, Sept. 2004.
[6] Q. Wang and L. Chang, “An intelligent maximum power extraction algorithm for
inverter-based variable speed wind turbine systems,” IEEE Transactions on Power
Electronics, vol. 19, pp. 1242–1249, Sept. 2004.
[7] R. Cardenas, R. Peña, G. M. Asher, and J. Clare, “Experimental emulation of wind
turbines and flywheels for wind energy applications,” EPE, vol. 1, p. 10, Aug. 2001.
73
74
REFERENCIAS
[8] F. Iov, “Contributions to modelling, analysis and simulation of ac drive systems.
application to large wind turbines,” Master’s Thesis, Dunarea de Jos University,
Galati, ROM, june 2003.
[9] J. F. Manell, J. G. McGowan, and A. L. Rogers, Wind Energy Explained Theory,
Design and Application. West Sussex, England: John Wiley and Sons, 2002.
[10] S. Heier and R. Waddington, Grid Integration of Wind Energy Conversion Systems.
West Sussex, England: John Wiley and Sons, 1998.
[11] P. Carlin, A. Laxson, and E. Muljadi, “The history and the state of the art of variablespeed wind turbine technology,” National Renewable Energy Laboratory (NREL),
1617 Cole Blvd, Golden CO, USA, Technical Report NREL/TP500-28607, 2001.
[12] T. Burton, D. Sharpe, N. Jenkins, and E. Bossanyi, Wind Energy Handbook.
West
Sussex, England: John Wiley and Sons, 2001.
[13] A. Petersson, “Analysis, modeling and control of doubly-fed, induction generators for
wind turbines,” Master’s Thesis, Chalmers Technical University, Sweden, june 2003.
[14] D. Matko, R. Karba, and B. Zupančič, Simulation and modelling of continuous systems. Salisbury, UK: Prentice Hall, 1992.
[15] B. C. Kuo, Automatic Control Systems. New York, USA: John Wiley, 2003.
[16] K. Ogata, Dinámica de Sistemas. México: Prentice-Hall, 1987.
[17] C. M. Close, Modeling and analysis of dynamic systems.
1993.
Dallas: Houghton Mifflin,
[18] IEEE Standard Test Procedure for Polyphase Induction Motors and Generators, IEEE
Power Engineering Society Std. 112, 2004.
[19] J. S. Chapman, Máquinas Eléctricas. Bogota, COL: Mcgraw hill, 1993.
[20] A. E. Fitzgerald, C. Kingsley, and S. D. Umans, Máquinas Eléctricas.
USA: Mcgraw hill, 1992.
New York,
[21] P. C. Krause, O. Wasynczuk, and S. D. Sudhoff, Analysis of Electric Machinery and
Drive Systems. Piscataway, NJ: Wiley-Interscience, 2002.
Referencias
75
[22] IEEE Guide: Test Procedures for Direct-Current Machines, IEEE Power Engineering
Society Std. 113, 1985.
[23] M. H. Rashid, Electrónica de Potencia: Circuitos, Dispositivos y Aplicaciones. New
Jersey, N.Y.: Prentice Hall, 1995.
[24] A. Cortés, “Control digital aplicado a un tipo de convertidor corrector del factor de
potencia monofásico,” Tesis de Maestrı́a, CENIDET, Cuernavaca, Mor, Agosto 2006.
[25] The MathWorks, Inc. (2006, Nov.) Embedded target for ti c2000 dsp. [Online].
Available: http://www.mathworks.com/access/helpdesk/help/toolbox/tic2000/
[26] M. A. Borja, O. A. Jaramillo, and F. Mimiaga, Primer Documento del Proyecto
Eoloeléctrico del Corredor Eólico del Istmo de Tehuantepec. Cuernavaca, Morelos,
México: IIE, 2005.
[27] M. A. Borja, Estado del arte y tendencia de la tecnologı́a eoloeléctrica. Cuernavaca,
Morelos, México: IIE, 1998.
[28] V. O. Segura, “Control neurodifuso multivariable aplicado al control de velocidad, potencia y temperatura de gases de escape de una unidad turbogas,” Tesis de Maestrı́a,
CENIDET, Cuernavaca, Mor, noviembre 2004.
[29] K. Ogata, Ingenierı́a de Control Moderna, Segunda Edición. México: Prentice-Hall,
1993.
[30] J. E. Freund and G. A. Simon, Estadı́stica Elemental. México: Prentice-Hall, 1994.
76
REFERENCIAS
Anexo
A
Configuración del RTDX
En la Tabla A.1 se enlistan las instrucciones que se utilizan para configurar la herramienta
de comunicación RTDX.
Tabla A.1: Listado para configurar la herramienta RTDX.
Listado
if myexist(‘CC Obj’)
cc=CCS Obj;
else
cc=ccsdsp;
end
outfile=‘C:zMATLABzR2006azworkzRESULTADOS2zWTE2 c2000 rtwzWTE2.out’;
load(cc,outfile);
configure(cc.rtdx,1024,8);
open(cc.rtdx,‘ichan1’,‘w’);
open(cc.rtdx,‘ochan1’,‘r’);
set(cc.rtdx,‘timeout’,20);
enable(cc.rtdx,‘ichan1’);
enable(cc.rtdx,‘ochan1’);
enable(cc.rtdx);
disp(‘Escribe un perfil de Viento de tamaño [720x1] de tipo double’);
disp(‘con la siguiente instrucción: writemsg (cc.rtdx,‘ichan1’,Vw)’);
pause disp(‘Para saber cuantos msgs hay en el buffer utilize:’);
disp(‘msgcount(cc.rtdx,‘ochan1’)’);
pause
disp(‘Para leer un numero determinado de msgs utilizar:’);
disp(‘readmsg(cc.rtdx,‘ochan1’,‘double’,3)’);
disp(‘Arranque el emulador con run(cc)! ! ! !’);
77
78
ANEXO A. CONFIGURACIÓN DEL RTDX
Anexo
B
Extras de la etapa de potencia
En la Tabla B.1 se enlistan los dispositivos utilizados en la implementación de la etapa de
potencia destinada a impulsar el motor de CD.
Tabla B.1: Listado de los dispositivos utilizados
Tipo de dispositivo
regulador de voltaje 5V
regulador de voltaje 15V
optoacoplador
impulsor
sensor de corriente
diodo
diodo
rectificador
interruptor
interruptor
Número de parte Cantidad
MC78L05ACP
2
PTB48510C
1
HCPL 2611
2
MIC 4452
2
CSLA2CD
2
MUR 620CTG
1
MUR 1560
1
BR84D
1
IRF840
1
NTP30N20G
1
Se utiliza el programa para realizar circuitos esquemáticos y circuitos impresos PCB
ProtelDXP, el esquemático se presenta en la Figura B.1 y la fotografı́a con el prototipo
terminado se presenta en la Figura B.2.
En el disco adjunto en este documento de tesis se incluyen los archivos con los
circuitos realizados en ProtelDXP.
79
80
ANEXO B. EXTRAS DE LA ETAPA DE POTENCIA
1
2
1
5V2
1
C33
100nf
A
JP1
A1
2
JUMPER
SIGNALgnd
ARM
+
SIGNALgnd
A
5V
15V
A2
puente6
PWMA
E
2
5
3
C1
100n
C4
10uf
C5
100n
VIN
C6
10uf 4
OP1
PWR1
VS
OUT
NC
OUT
GND
GND
Sarm
5V
8
SENSOR
7
5
C13
100n
6
C14
10uf
2
Vcc
K
nc
6
5
R5
IMP1
1
G
10
puente4
1
2
C15
.33uf
Q1
NTP30N20G
3
5V2
Scurr
1
2
3
in Vss
out
4
out gnd
PWR2
CSLA2CD
DS
1
PWMA
3
4
C
2
8
7
2
1
390
1
2
MIC-4452
1
VS
2.7K
Ve
R1
nc
A
D1
MUR-1560
1
-
R3
1
2
A
2
Vin Vout
GND
K A
1 2
C22
.33uf
2
2
C3
100nf
4
100V
GND
15V 3
1
Vin Vout
GND
C2
.33uf
5V
1
GND
15V 3
3
U2
MC78L05ACP
2
U1
MC78L05ACP
puente5
OP2
HCPL-2611
OUT
NC
OUT
8
GND
GND
F1
puente1
7
C11
100n
6
C12
10uf
5
F4
R6
IMP2
10
Ñ
100V
FIELD
M
A
A
VIN
K
3
C10
10uf 4
2
C9
100n
2
C8
10uf
D2
MUR620CTG
1
3
1
1 2
1 2
PWMF
C7
100n
VS
2
1
1
2
390
1
2
R2
PWMF
2
100V
MIC-4452
1
VS
2.7K
1
2
B
puente7
R4
1
15V
2
B
5V2
PWR3
SENSOR2
5
in Vss
out
4
out gnd
Sfield
Scurr2
1
2
3
1
2
C20
.33uf
PWR4 CSLA2CD
C
GNDPW
cn100V
cn100V
G
Q2
IRF840
70V
2
1
2
C18
2
.068@250V
T SEC
D
T_SEC
in
OUT
in
OUT
CMC UT20
4
2
3
3
AC
V+
AC
V-
1
4
1
cn15V
15V
CDCD
1
EMI_filter
1
2
3
1
DS
1
2
2
C
C19
220uf@100V
3
4
BR84D
+Vin
+Vout
Sync In
com
Enable
Vo Adj
-Vin
-Vout
5
6
puente2
R7
1.5240K
7
8
D
Title
PTB48510C
Circuito Chopper con Impulsores
70Vgnd
Size
Number
Revision
Legal
Date:
File:
1
2
04/12/2006
Sheet of
C:\Archivos de progr ama\..\CHOPPERS.SchDoc
Drawn By:
3
4
Figura B.1: Diagrama esquemático de los troceadores.
+
+ F4
Cn100V F1
+
A2
A1
Sarm +
+
PWMA
T_SEC
+
Sfield
+ PWMF
Cn15V
-+
Figura B.2: Troceadores implementados.
Anexo
C
Guı́a de inicio rápido para la tarjeta
eZdspF2812
La información presentada en este anexo tiene como objetivo facilitar la puesta en marcha
de la tarjeta eZdspF2812 mediante MATLAB/SIMULINK. Al inicio de esta investigación
se presentaron ciertos problemas para poner en marcha la tarjeta, sin embargo sı́ se sigue
con lo descrito en este anexo se evitarán los mismos.
Se tratará de ser breve y conciso en la explicación de cada uno de los puntos necesarios
para la puesta en marcha de la tarjeta. Ya que esta sólo es una guı́a de inicio rápido en
dónde cualquier usuario con conocimientos únicamente de SIMULINK será capaz de poner
en marcha la tarjeta eZdspF2812.
La información de este anexo esta organizada de la siguiente manera:
1. Requerimientos mı́nimos de hardware y tarjetas soportadas.
2. Requerimientos de software del sistema y modo de instalación.
3. Configuración básica del SIMULINK.
C.1
Requerimientos de hardware
La computadora debe cumplir con los siguientes requerimientos mı́nimos necesarios para
poder arrancar la tarjeta eZdspF2812 mediante MATLAB/SIMULINK.
procesador Intel Pentium ó compatible
81
82
ANEXO C. GUÍA DE INICIO RÁPIDO PARA LA TARJETA EZDSPF2812
64M B de memoria RAM (recomendado 128M B)
3.1GB libres de disco duro para instalar (MATLAB/SIMULINK y CCS)
monitor a color
un puerto paralelo para conectar la tarjeta eZdspF2812 a la computadora
unidad lectora de CD ó DVD
Las tarjetas soportadas por la herramienta de SIMULINK Embedded Target for TI
C2000 se enlistan en la Tabla C.1; entre las abajo listadas se encuentra la tarjeta utilizada
en la implementación de este trabajo de tesis. El contenido del kit eZdspF2812 se presenta
la Figura C.1, con lo que se concluye con la sección C.1.
Tabla C.1: Tarjetas soportadas
Tarjetas de inicio (DSK) de la
compañı́a Spectrum Digital
DSK eZdsp320F2812
DSK eZdsp320F2808
DSK eZdsp320LF2407
Tarjetas basadas en cualquiera
de los siguientes DSC’s de TI
TMS320F2801
TMS320F2810
TMS320F2802
TMS320C2811
TMS320F2806
TMS320F2811
TMS320F2808
TMS320R2811
TMS320F2809
TMS320C2812
TMS320C2810
TMS320F2812
Figura C.1: Contenidos del kit eZdspF2812.
C.2. REQUERIMIENTOS DE SOFTWARE
C.2
83
Requerimientos de software
En esta sección se presentan los puntos claves necesarios para la instalación del software
MATLAB/SIMULINK y del CCS. El espacio requerido en disco duro para la instalación
del MATLAB/SIMULINK es de 2.65GB y para la instalación del CCS es de 450M B.
Antes de comenzar con la instalación es necesario considerar la compatibilidad entre
ambos paquetes, ya que es necesario instalar la versión adecuada de cada uno de
ellos; si no se instalan las versiones adecuadas se generarán errores al momento de compilar
algún archivo. En la Tabla C.2 se muestra la version de cada software instalado en la PC
dónde se implementó el sistema emulador.
Una última consideración que debe tomarse en cuenta es la ruta de instalación de
ambos paquetes, ya que no debe tener espacios en blanco; si se dejan espacios en
blanco en la ruta de instalación se generarán errores al momento de compilar. En la Tabla
C.2 se muestran las rutas de instalación utilizadas en este trabajo de tesis para ambos
paquetes.
Tabla C.2: Version del software utilizado
Software
MATLAB
CCS
Versión
R2006A
3.1
Carpeta de instalación
C:zR2006a
C:zCCStudio v3.1
Junto con lo anterior, se debe verificar que se incluyen los complementos adicionales
de MATLAB, ya que estos son necesarios para que el funcionamiento del sistema sea
correcto. Los complementos deben incluirse al inicio de la instalación, sin embargo si ya
se cuenta con una instalación únicamente se debe instalar el complemento faltante. Los
complementos necesarios se listan en la Tabla C.3.
Por otro lado, con la instalación del software CCS también se instalan complementos
adicionales y se debe verificar que estos se hayan instalado. En la Tabla C.3 se presentan los
complementos que deben instalarse junto con el CCS. Si se instalan las versiones sugeridas
en la sección C.2, todo el software anteriormente descrito y presentado en la Tabla C.3
será compatible entre sı́.
84
ANEXO C. GUÍA DE INICIO RÁPIDO PARA LA TARJETA EZDSPF2812
Tabla C.3: Complementos
Complementos de MATLAB
SIMULINK Fixed Point
Link for Code Composer Studio
Real-Time Workshop
Fixed-Point Toolbox
Signal Processing Toolbox
Real-Time Workshop Embedded Coder
Signal Processing Blockset
SIMULINK Accelerator
Complementos de CCS
Assembler
Compiler
Linker
TI C2000 miscellaneous utilities
Code Composer Setup Utility
Para determinar si la Embedded Target for TI C2000 DSP esta instalada en el sistema, se debe teclear en el espacio de trabajo de MATLAB el siguiente comando:
c2000lib
MATLAB despliega el bloque Embedded Target for TI C2000 DSP (Figura C.2)
conteniendo las librerı́as que lo conforman.
General
Chip Support
Optimized Libraries
C2800 RTDX
Instrumentation
C281x DSP
Chip Support
C28x IQmath
Library
C2000 Target
Preferences
C280x DSP
Chip Support
C28x DMC
Library
Host-side
CAN Blocks
C2400 DSP
Chip Support
Info
Demos
Block Libraries for
Embedded Target for Texas Instruments(tm)
TMS320C2000 DSP Platform
Copyright 2003-2005 The MathWorks, Inc.
Figura C.2: Librerı́as que conforman el bloque Embedded Target for TI C2000 DSP.
C.3. CONFIGURACIÓN BÁSICA DEL SIMULINK
85
Sı́ no se despliega el bloque que se presenta en la Figura C.2 ó MATLAB no reconoce
el comando, entonces será necesario instalar el Embedded Target for TI C2000 DSP. Sin
este software no será posible utilizar SIMULINK y Real-Time Workshop para desarrollar
aplicaciones en la tarjeta eZdspF2812.
Para verificar si el software CCS se encuentra instalado en el sistema teclear el
siguiente comando en el espacio de trabajo de MATLAB:
ccsboardinfo
Con el CCS instalado y configurado, MATLAB regresa información acerca de las
tarjetas que son reconocidas en la PC. En la Figura C.3 se muestra la manera en que
MATLAB despliega la información en pantalla.
Figura C.3: Lista de tarjetas instaladas en el PC.
Cumpliendo con lo anteriormente descrito se tendrá un sistema listo para operar,
restando configurar algunas opciones de SIMULINK que son presentadas en la siguiente
y última sección de esta tesis.
C.3
Configuración básica del SIMULINK
Antes de generar un modelo en SIMULINK se deben configurar ciertos parámetros básicos.
En esta sección se presentará la configuración utilizada en esta tesis, pero debe dejarse
claro que esta configuración podrı́a variar según la aplicación que se desee generar.
Cuando se arrastra el bloque Target Preferences en el diagrama SIMULINK, automáticamente se configuran los parámetros básicos de la simulación. Sin embargo, también
se pueden modificar esos valores de modo manual, accediendo mediante: Simulation Ñ
Configuration Parameters.
En modo manual, se configura lo siguiente:
86
ANEXO C. GUÍA DE INICIO RÁPIDO PARA LA TARJETA EZDSPF2812
Siguiendo la ruta Simulation Ñ Configuration Parameters Ñ Solver Ñ Solver
Options se debe especificar el método de integración que en este caso se selecciona
el Fixed-step y discrete (no continuous states).
Ahora bajo la ruta Simulation
Ñ
Configuration Parameters
Ñ
Real-Time
Workshop Ñ System target file se especifica el tipo de sistema que se requiere
trabajar y en este caso se selecciona el archivo ti c2000 ert.tlc, enseguida se justifica
el motivo de esta configuración..
Un sistema genérico en tiempo real (GRT por sus siglas en inglés), es la configuración
destinada a generar código para un sistema en tiempo real si el código resultante será ejecutado en una estación de trabajo ó PC, si se requiere un sistema con estas caracterı́sticas
se debe elegir el archivo ti c2000 grt.tlc bajo la ruta Simulation
rameters Ñ Real-Time Workshop Ñ System target file.
Ñ Configuration Pa-
Un sistema embebido en tiempo real (ERT por sus siglas en inglés), es la configuración destinada a generar código para un sistema en tiempo real si el código resultante será
ejecutado de modo independiente en una tarjeta de desarrollo, si se requiere un sistema
con estas caracterı́sticas se debe elegir el archivo ti c2000 ert.tlc bajo la ruta Simulation
Ñ
Configuration Parameters Ñ Real-Time Workshop Ñ System target file.
Esta opción requiere del complemento Real-Time Workshop Embedded Coder.
Con la configuración anterior se genera código en tiempo real y se descarga en la
tarjeta eZdspF2812 dando clic en Build bajo la ruta Simulation Ñ Configuration
Parameters Ñ Real-Time Workshop.