Revisión de las Teorías de Placas Laminadas
Anuncio

4
Revisión de las Teorías de Placas
Laminadas
4.1 Introducción.
Las estructuras laminadas, como ya fue descrito en el capítulo 3, están formadas por el
apilamiento de láminas de materiales compuestos con diferentes orientaciones de fibra. El
objetivo de este capítulo es describir las teorías de laminados compuestos más comúnmente
utilizadas. De esta forma, para un mejor entendimiento de esta sección sobre el análisis de
placas compuestas laminadas será presentado un pequeño resumen de acuerdo a las siguientes
teorías mostradas por Reddy [27]:
1. Teoría de de Lámina Equivalente, ESLT – Equivalent Single Layer Theory (2-D).
(i) Teoría Clásica de Placas Laminadas, CLPT – Classical Laminated Plate Theory.
(ii) Teoría de Primer Orden de Mindlin, FSDT – First-order Shear Deformation Theory.
(iii) Teoría de Orden Superior, HSDT – Higher-order Shear Deformation Theory.
2. Teoría de Lámina Discreta, LWT – Layerwise Theory (3-D).
Por ser bidimensional, la Teoría de Lámina Equivalente es más simple. Lo que diferencia
a los tres modelos ESLT es la consideración o no, de los efectos del cizallamiento fuera del plano
de la lámina. Por tanto en las próximas secciones se presentarán más detalladamente las teorías
basadas en ESLT. Por otro lado, la Teoría de Lámina Discreta LWT, considera la continuidad
de las tensiones σzz, τxz y τyz en las interfaces de las láminas, representando resultados más
precisos, principalmente para la tensión transversal normal σzz.
El análisis de placas y laminados en materiales compuestos también podría realizarse
por medio de la Teoría Tridimensional de la Elasticidad o bien la Teoría de Placas y Láminas.
En la Teoría de la Elasticidad cada lámina es considerada como un medio continuo, con
propiedades diferentes a la lámina adyacente. Además del número de ecuaciones diferenciales de
equilibrio generadas, [3 x nº láminas] son empleadas ecuaciones adicionales para garantizar la
continuidad de desplazamientos y tensiones. A medida que el número de láminas aumenta, el
sistema de ecuaciones a resolver es cada vez mayor, dificultando su resolución. Por otro lado, en
las teorías de placas laminadas, en cada lámina se considera un estado plano de tensiones con
unión perfecta entre láminas, o sea sin deslizamiento. Las propiedades del material laminado, tal
como la rigidez, son obtenidas integrando las propiedades materiales de cada lámina, a lo largo
del espesor del laminado. Por tanto, las teorías de láminas y placas laminadas pueden ser
23 24
Teoría de Placas Laminadas equivalentes a las teorías de una lámina, reduciéndose así el número de ecuaciones necesarias
para describir el sistema.
A lo largo de este trabajo serán presentadas varias teorías de Placas Laminadas, basadas
en la hipótesis de asumir un campo de desplazamientos. El origen de estas teorías se atribuye a
[Basset, 1890]. El campo de desplazamientos de Basset para una lámina consiste en una
expansión en serie de la coordenada del espesor, ζ. Por ejemplo,
,
,
,
,
donde (ε1,ε2) son las coordenadas curvilíneas de la superficie media de la lámina:
,
,
0,
0,1,2 …
Más tarde, Hildebrand et al [1949] presentaron una teoría de deformación cortante para
laminados, cuyo campo de desplazamientos, (4.1-4.3) originalmente presentado por Hencky
[1947], viene dado por:
,
,
,
,
(4.1)
,
,
,
,
(4.2)
,
,
,
(4.3)
Esta aproximación da origen a cinco ecuaciones diferenciales y es considerada como la
Teoria de Placa de primer orden de Mindlin [1951], quien presentó una teoría dinámica para
placas isótropas basándose en el anterior campo de desplazamientos. Otras teorías de
deformación cortante de orden superior fueron estudiadas por Librescu [1975], Lo et al [1977],
Murthy [1981] y Levinson [1980], entre otros.
4.2 Ecuaciones de Euler-Lagrange.
A continuación se muestran las ecuaciones de placas y láminas, resueltas mediante el
cálculo variacional. El cálculo de variaciones busca un extremo funcional, es decir un mínimo,
máximo o punto de inflexión de una función de funciones (en términos físicos, un mínimo o
máximo). En esta sección se ofrece una explicación simplificada del principio de Hamilton y la
derivación de las ecuaciones de Euler-Lagrange [Maia, 2000; Hazewinkel, 2002; Ramos, 2004].
Las ecuaciones de Euler-Lagrange fueron desarrolladas por Leonhard Euler y Joseph
Louis Lagrange, en un estudio que puede enunciarse como sigue: dados dos puntos A y B en un
plano vertical se quiere que una partícula M que se mueve a través de AMB, bajo la acción de
su propio peso, pase del punto A al punto B en el menor tiempo. Lagrange resolvió este
problema en 1755 y envió la solución de Euler. Los dos desarrollaron el método utilizado por
Lagrange y lo aplicaron en la mecánica, desarrollándose la Mecánica Lagrangiana, y más tarde el
Cálculo de Variaciones, un término utilizado por Euler en 1766.
Considérese el camino definido por la integral que se muestra a continuación entre los
instantes t1 y t2:
, ,
(4.4)
25
Teoría de Placas Laminadas La integral (4.4) se llama integral de acción y traduce matemáticamente el principio de
Hamilton o principio de acción estacionaria. El principio de Hamilton [Hamilton, 1835] fue
creado por William Hamilton y luego generalizado por Ostrogradski [1850]. La acción L se llama
función lagrangiana, y representa un equilibrio entre la energía cinética y la energía potencial de
un sistema. En algunos casos, el valor estacionario corresponde a un mínimo, entonces el
principio puede ser llamado el principio de mínima acción de Hamilton.
Se trata de encontrar soluciones del funcional I, sin calcular explícitamente
, , . En cuanto al estudio de las placas y láminas, tratamos de encontrar las respectivas
ecuaciones de equilibrio dinámico.
Las soluciones de la integral de acción están dadas por las ecuaciones de Euler Lagrange:
(4.5)
donde Q representa las fuerzas generalizadas no conservativas.
Cualquier solución del problema de Euler-Lagrange se trata de un extremo del problema
variacional (4.4).
Las soluciones del problema de Euler-Lagrange se obtienen de la siguiente manera:
, ,…, , , ,…, ,
donde qk son las
Consideremos una función lagrangiana
coordenadas generalizadas. Los valores estacionarios del funcional I pueden ser encontrados
haciendo,
0:
(4.6)
Integrando el término
por partes, se obtiene:
(4.7)
y sustituyendo se obtiene:
(4.8)
Para garantizar que
coeficiente
:
0 para cualquier pequeña variación de
,
, se tiene para cada
1,2, … ,
(4.9)
La notación δ fue introducida por Lagrange para representar una variación virtual de
una función y aunque tenga un significado físico distinto de la derivada d, tiene las mismas
26
Teoría de Placas Laminadas propiedades matemáticas. No obstante, una variación virtual es considerada independiente de la
variable tiempo. Por ejemplo,
, , :
4.2.1 Ecuaciones de Euler-Lagrange aplicadas a la
Teoría Clásica de Placas.
Las ecuaciones de equilibrio se obtienen usando el Principio de los Trabajos Virtuales.
Consideremos una placa de altura h, área Ω0, densidad ρ0, sometida a una presión
q(x,y). Las componentes energéticas consideradas son la energía de deformación U, la energía
cinética K y la energía producida por las fuerzas externas aplicadas, V.
Para encontrar las ecuaciones de Euler-Lagrange asociadas a la teoría clásica, se
busca un extremo, que en este caso coincide con un mínimo de
.
Aplicando el Principio de los Trabajos Virtuales, e igualando la variación a cero, se
obtiene:
0
(4.10)
con
/
2
/
Ω
(4.11)
Ω
(4.12)
/
Ω
/
(4.13)
Las expresiones de u, v, w se denominan campo de desplazamientos. Estas expresiones
permiten describir el comportamiento de un punto de la placa en torno a los ejes x, y, z.
Diferentes hipótesis dan origen a diferentes campos de desplazamientos, que a su vez dan origen
a diferentes ecuaciones de Euler-Lagrange. En este ejemplo se considera el más simple de los
campos de desplazamientos para una placa, que da origen a la teoría clásica de placas.
El campo de desplazamientos considerado es:
27
Teoría de Placas Laminadas ⁄
⁄
0
(4.14)
Aplicando el tensor de deformaciones infinitesimales ε, se obtienen las ecuaciones
cinemáticas:
⁄
⁄
⁄
⁄
⁄
⁄
⁄
2
(4.15)
Sustituyendo (4.15) en (4.11) se obtiene:
/
Ω
/
2
Ω
/
/
/
/
/
/
/
/
/
/
/
/
/
2
/
Ω
2
(4.16)
Y de la misma manera, sustituyendo (4.14) en (4.13) se obtiene:
/
Ω
/
/
Ω
/
Ω
(4.17)
Los términos Nxx, Nyy y Nxy son los esfuerzos, Mxx, Myy y Mxy son los momentos
resultantes e I0, I1 e I2, son los momentos de inercia. Las ecuaciones de las resultantes son
obtenidas por integración de las componentes a lo largo de la dirección del espesor, de la forma:
28
Teoría de Placas Laminadas (4.18)
(4.19)
en cuanto que los momentos de inercia son obtenidos por:
1
(4.20)
Para obtener las dependencias con δu0, δv0 y δw0 será necesario integrar los términos de (4.16)
por partes:
2
2
2
2
2
(4.21)
Procediendo de la misma manera en (4.17), se obtiene:
(4.22)
29
Teoría de Placas Laminadas (4.23)
Sustituyendo en (4.10) y eliminando los términos
ecuaciones de equilibrio dinámico:
se obtienen las siguientes
:
:
:
2
(4.24)
4.3 Teorías de Deformación de Placas.
4.3.1 Revisión Bibliográfica.
Todas las teorías usadas en este trabajo tienen su origen en un campo de
desplazamientos conocido, dando origen a las ecuaciones de equilibrio de Euler-Lagrange. El
campo de desplazamientos usa las coordenadas generalizadas del problema. En los siguientes
ejemplos se pretende exponer una lista de diferentes campos de desplazamientos. Un análisis
más detallado sobre las distintas teorías de deformación puede ser encontrado en el artículo de
revisión de Rohwer et al [2005], Carrera [2003] y Altenbach [1998].
Teoría Clásica: La teoría clásica considera tan sólo tres grados de libertad. u0, v0 y w0, que
computacionalmente es una ventaja. Esta teoría es adecuada en estructuras de poco espesor.
[Rohwer et al, 2005].
⁄
⁄
0
(4.25)
30
Teoría de Placas Laminadas Teoría de Primer Orden: La teoría de primer orden considera cinco grados de libertad,
u0, v0, w0, u1, u2, y nos proporciona mejor comportamiento para estructuras de bajo espesor que
la teoría clásica, [Rohwer et al, 2005]. Precisa de un coeficiente de corrección a cortante que
dependerá de las relaciones geométricas, propiedades materiales y secuencia de laminación. Esta
teoría de primer orden fue empleada en estructuras compuestas por [Yang et al, 1966] y
[Whitney & Pagano, 1970].
0
(4.26)
Teoría de Orden Superior: De forma general, las teorías de orden superior tienen un
campo de desplazamientos de la forma:
(4.27)
El parámetro n es normalmente inferior a 3, de manera que no aumente excesivamente el coste
computacional. Estas teorías se caracterizan por no necesitar de factor de corrección a cortante,
teniendo una buena aproximación de la energía de corte transversal.
Teorías de Tercer Orden: Según [Jemlelita, 1990] la primera teoría de deformación de
tercer orden fue propuesta por Vlasov en 1957. La propuesta por Vlasov necesitaba siete grados
de libertad. Fueron presentadas varias teorías que manteniendo los términos de tercer orden,
reducían el número de grados de libertad. [Murphy, 1981] y [Reddy, 1984], presentaron teorías
de tercer orden con cinco grados de libertad, y con idéntica precisión. Diferentes consideraciones
en la formulación de las teorías originan los campos de desplazamientos indicados a
continuación:
[Murphy, 1981]
⁄
⁄
5
5
0
⁄
⁄
4
5
3
0
(4.28)
[Reddy, 1984]
⁄
⁄
0
4
3
(4.29)
Basándose en la teoría de Reddy, [Senthilnathan et al, 1987] desarrolló una teoría de
tercer orden con cuatro grados de libertad. Sin embargo la teoría de Senthilnathan tiene una
precisión inferior a la teoría de Reddy.
⁄
⁄
0
⁄
⁄
0
4
3
31
Teoría de Placas Laminadas (4.30)
Otra teoría de tercer orden con siete grados de libertad es la conocida como teoría de Kant
[Manjunatha y Kant, 1992]
0
0
(4.31)
En este trabajo será utilizada la teoría de tercer orden de Reddy con cinco grados de libertad.
Otras Teorías de Orden Superior: Otras teorías de orden superior aumentan el
grado del polinomio en el desplazamiento transversal
, [Kwon y Akin, 1987]. En este caso el
número de grados de libertad es cinco. No precisa de coeficiente de corrección a cortante, sin
embargo los resultados obtenidos con esta teoría son peores a los obtenidos con la teoría de
primer orden con coeficiente de corrección.
0
0
0
(4.32)
Reissner [1975] propuso la combinación de una expansión de z2 de los desplazamientos
transversales junto con una expansión cúbica de los términos en u y v. Esta teoría produce
resultados muy precisos a costa de tener ocho grados de libertad. Fue aplicada a placas
laminadas por [Lo et al, 1977] y desarrollada por [Pandya y Kant, 1988].
[Reissner 1975]
0
0
0
0
(4.33)
[Pandya y Kant 1988]
0
0
0
(4.34)
Teorías Trigonométricas: Las teorías trigonométricas usan una función trigonométrica
para formular el campo de desplazamientos. Los resultados de la teoría propuesta por [Idlbi et
al, 1997] están más próximos de los resultados obtenidos mediante la formulación 3D de la
elasticidad que de los resultados de la teoría clásica, de primer orden o de tercer orden de
Reddy, y con sólo cinco grados de libertad.
[Idlbi et al 1997]
⁄
⁄
0
⁄
⁄
0
(4.35)
32
Teoría de Placas Laminadas [Shimpi et al 2003]
0
0
⁄
⁄
0
0
(4.36)
Existe una variación de la teoría de Shimpi que elimina el término del desplazamiento
transversal expresado en coseno.
⁄
⁄
0
0
(4.37)
Teoría Zig-zag: Las teorías zig-zag presentan la forma:
,
,
,
,
,
,
(4.38)
En un laminado con N láminas, el número de grados de libertad es 3(n+1)N lo que resulta ser
computacionalmente muy exigente. La teoría de zig-zag de [Arya et al, 2002] introduce los
términos
,
,
y
que mejoran los resultados para placas de espesor grande, sin
aumentar el número de grados de libertad a pesar de ser una teoría de zig-zag.
Teoría Zig-zag trigonométrica: Una teoría zig-zag con términos trigonométricos para
vigas fue propuesta por [Arya et al, 2002]. El número de grados de libertad es cinco.
⁄
⁄
0
0
0
0
(4.39)
4.3.2 Análisis utilizando CLPT. Teoría de Placas
Laminadas de Kirchhoff.
La primera teoría aplicada para el estudio de las estructuras laminadas fue la CLPT,
.que fue desarrollada por Gustav Kirchhoff [1850]. Es una extensión de la Teoría Clásica de
Placas - CPT, o sea, una adaptación de la Teoría de Kirchhoff para laminados, de manera que
obedece a las mismas hipótesis del modelo para placas:
1.
2.
El laminado consiste en la unión de láminas unidas perfectamente entre sí. La capa de resina
se utiliza para unir las láminas entre sí, es fina e indeformable por cizallamiento, por tanto
no se considera en el análisis;
Secciones planas, o sea, las líneas perpendiculares a la superficie media en la configuración
indeformada, permanecen planas y perpendiculares después de la deformación, pues el
33
Teoría de Placas Laminadas laminado es considerado delgado. Esto se cuantifica de manera bastante arbitraria y según
Reddy [24]:
(a) Laminados delgados: la relación longitud frente a espesor, a/h, debe ser mayor o igual a 50;
(b) Laminados medios: 20 ≤ a/h < 50;
(c) Laminados de espesor grande: a/h < 20;
3. Los segmentos normales a la superficie son considerados inextensibles, por tanto, de longitud
constante, es decir, no se produce deformación transversal de la placa.
La primera hipótesis impone la condición de que no se produce desplazamiento entre las
láminas, más allá de los desplazamientos continuos a través de las láminas. La segunda hipótesis
se refiere a no considerar los efectos del cizallamiento transversal, o sea, γxz y γyz son
despreciados y la tercera hipótesis implica que el desplazamiento transversal es independiente
del espesor y que la deformación lineal, εzz, es nula. En la formulación de este modelo, de
acuerdo con algunas de estas hipótesis, surgen las siguientes restricciones:
1. El material de cada lámina es lineal elástico, por tanto asumimos la hipótesis de pequeñas
deformaciones;
2. El modelo presenta dos planos de simetría, o sea, es ortótropo.
El campo de desplazamientos, de acuerdo a las hipótesis de Kichhoff viene dado por la
expresión:
, , ,
, ,
, , ,
, ,
, ,
, ,
, ,
, , ,
(4.40)
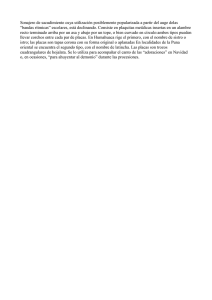
donde u0, v0, w0 son los desplazamientos de la superficie media a lo largo de los ejes xyz,
respectivamente y ∂w0/∂x y ∂w0/∂y son las rotaciones en torno a y y x, respectivamente. La
figura 4.1 [Moura Belo, 2006] muestra las configuraciones indeformada y deformada de acuerdo a
las hipótesis de Kirchhoff en el plano xz, como el plano de referencia es el plano medio (z=0), un
problema que originalmente debía ser tratado como 3D, pasa a ser bidimensional.
Fig. 4.1. Configuración de placa deformada e indeformada según las hipótesis de Kirchhoff.
34
Teoría de Placas Laminadas Consecuentemente el campo de deformaciones viene dado por:
2
(4.41)
donde εxx y εyy son las deformaciones normales al plano y γxy es la deformación cortante en el
plano xy. En este punto, son definidas las deformaciones coplanarias de la superficie de
referencia como las deformaciones de membrana. Estas deformaciones son aquellas que son
independientes de z en la Eq. (4.41) y se relacionan con los deslizamientos de membrana por u0 y
v0:
(4.42)
Los términos dependientes de z en la Eq. (4.41) son deformaciones asociadas a la flexión
de la superficie media y son denominadas curvaturas y vienen dadas por la derivada segunda del
desplazamiento transversal:
4.43)
Por tanto se representa el vector de deformaciones como:
(4.44)
o en forma compacta con:
(4.45)
Conociendo los valores de los desplazamientos de membrana (u0,v0,w0) es posible
determinar deformaciones en cualquier punto (x,y,z) de la placa empleando la Eq. (4.44).
35
Teoría de Placas Laminadas Como en la CLPT todas las deformaciones transversales (εzz, γxz, γyz) son nulas por
definición, para un laminado formado por láminas ortótropas las tensiones cortantes
transversales (τxz,τyz) también son nulas. A pesar de que εzz tenga valor nulo, la tensión σzz no es
nula, sin embargo es despreciada en el modelo de Kichhoff. Con esto, aplicando la Eq. (4.44) en
(3.46a) la relación tensión-deformación de la k-ésima lámina será:
0
1
0
1
0
1
(4.46)
o simplemente,
(4.47)
A pesar de que los valores de {ε0} son constantes a lo largo del espesor del laminado, los
valores {ε1} varían linealmente. De esta forma, las deformaciones varían linealmente de forma
continua a lo largo del espesor. Con todo, los valores de tensión, siendo lineales, presentan
discontinuidades a lo largo del espesor h del laminado, pues las propiedades elásticas varían de
una lámina a otra conforme se muestra en la Eqs. (4.46) y (4.47). La Fig. 4.2 también muestra
esta variación, además de representar la enumeración que se realiza de las láminas.
Fig. 4.2: Enumeración típica de un laminado con la variación de las tensiones y deformaciones
normales a lo largo del espesor según la CLPT.
Los valores de tensión obtenidos por las Eqs. (4.46) y (4.47) pueden ser evaluados a
partir de las resultantes de tensión en el laminado. Estas resultantes son obtenidas por la
integración de las tensiones a través del espesor del laminado. De esta forma, la Eq. (4.48a)
representa los esfuerzos normales resultantes en una placa, en tanto que la Eq. (4.48b) muestra
los momentos resultantes, o sea:
,
,
,
,
(4.48a)
36
Teoría de Placas Laminadas ,
,
,
,
(4.48b)
Tanto {N} como {M} vienen dados por unidad de longitud de la placa y su orientación
se muestra en la Fig. 4.3.
Fig. 4.3. Elemento diferencial de placa sujeta a flexión con la resultante de tensión y distribución
de tensiones según la CLPT.
Las integrales definidas mediante la Eq. (4.48) pueden ser convertidas en un sumatorio
de integrales a lo largo del espesor de cada lámina k, o sea:
(4.49)
y
(4.50)
donde zk+1 se refiere a la cota superior de la lámina y zk es la cota inferior. (ver Fig.4.2).
Sustituyendo las tensiones laminares dadas por las Eqs. (4.10) y (4.11)por la relación
tensión- deformación de la Eq. (4.7), se obtienen los esfuerzos normales:
1
1
0
1
0
1
0
1
(4.51)
Efectuando el sumatorio y resolviendo la integral, tenemos:
37
Teoría de Placas Laminadas 0
1
0
1
0
1
(4.52)
Análogamente para las resultantes de Momentos, se obtiene:
1
1
0
1
0
1
0
1
(4.53)
y finalmente,
0
1
0
1
0
1
(4.54)
Es posible colocar los esfuerzos normales y momentos resultantes expresados por (4.52)
y (4.54) en un único vector, esto es:
0
0
0
1
(4.55)
1
1
o de manera compacta:
(4.56)
donde los términos Aij, Bij y Dij son definidos en términos de la rigidez de la lámina Qij(k) (para
i,j=1,2,6) por:
,
,
1, ,
1, ,
(4.57a)
o,
1
2
38
Teoría de Placas Laminadas 1
3
(4.57b)
Una parte de la fuerza normal resultante causada por la deformación normal es descrita
en la matriz [A] también llamada matriz de rigidez extensional. En cuanto a la matriz [D], o
matriz de rigidez a flexión, como su propio nombre indica representa la parte del momento
resultante causado por la flexión del laminado. El acoplamiento entre los modos de deformación,
es decir, la parte de la fuerza normal resultante causada por la flexión y la parte del momento
resultante causado por la deformación normal es representada por la matriz [B], o matriz de
rigidez de acoplamiento tracción-flexión. Conforme al ángulo θ formado entre la dirección de la
fibra de la lámina y el eje de coordenadas absoluto del problema, la matriz [B] puede ser nula.
Las ecuaciones de equilibrio de Euler-Lagrange son expresadas mediante las siguientes
ecuaciones:
2
(4.58)
4.3.3 Análisis utilizando FSDT. Teoría de Mindlin.
En un análisis mediante FSDT (First-order Shear Deformation Theory), no se considera
la hipótesis de Kirchhoff de que las secciones normales transversales permanecen perpendiculares
tras la deformación. De esta manera se considerarán las componentes cortantes o de cizalladura.
De hecho, estas componentes además de no ser nulas, pueden alcanzar valores importantes en
las interfaces de las láminas de los materiales compuestos, pudiendo causar la delaminación.
Las primeras teorías de placas que tienen en cuenta los efectos de cizallamiento
trasversal son atribuidas a Heinrich Hencky [1947], Eric Reissner [1944,1945] y Raymond
Mindlin [1951]. Una teoría de lámina equivalente fue introducida por Paul Naghdi [1957].
Mindlin y Reissner propusieron el estudio de las tensiones cortantes en las placas homogéneas
isótropas, es por esto por lo que se conoce como a la Teoría de Primer Orden de Mindlin.
Posteriormente estos estudios fueron extendidos para el análisis de laminados por Yang y
Whitney.
Considerando que las ecuaciones fundamentales de la FSDT son análogas a las
presentadas en la sección 4.3.2, a continuación se muestran las relaciones más relevantes que
diferencian una teoría de otra. Con esto, el campo de desplazamientos dado por la Eq. (4.40) es
ahora:
, , ,
, ,
, ,
, , ,
, ,
, ,
, ,
, , ,
(4.59)
39
Teoría de Placas Laminadas donde (u0,v0,w0,øx,øy) son las incógnitas por determinar, también llamados desplazamientos
generalizados. Al igual que en la CLPT, u0,v0,w0 son los desplazamientos de un punto cualquiera
de la superficie de referencia, o sea, en el plano z=0. Las rotaciones øx y øy pueden ser expresadas
por:
;
(4.60)
e indican las rotaciones respecto de los ejes y y x, respectivamente. En la Fig. 4.4 se muestran
estas rotaciones en la configuración indeformada en el plano xz, o sea en torno a y.
Fig. 4.4. Configuración de la Placa deformada e indeformada según la
Teoría de Primer Orden de Mindlin.
Asumiendo que el material trabaja en régimen lineal elástico, por tanto despreciando la
parte no lineal de las deformaciones y aplicando (4.2) en (4.19)
(4.61)
o vectorialmente:
0
0
(4.62)
40
Teoría de Placas Laminadas Donde el primer vector contiene las deformaciones de membrana y el segundo las
curvaturas.
Las ecuaciones de equilibrio para la Teoría de Placas de Primer Orden se obtienen
usando la versión dinámica del Principio de los Trabajos Virtuales, e igualando la variación a
cero:
0
(4.63)
donde la energía virtual de deformación viene dada por:
/
/
Ω
(4.64)
y la energía virtual de las fuerzas externas, se obtiene:
Ω
(4.65)
la energía virtual producida por las fuerzas de inercia viene expresada por:
/
/
Ω
(4.66)
Sustituyendo las expresiones anteriores e integrando a lo largo del eje z, se obtiene:
0
Ω
(4.67)
donde:
41
Teoría de Placas Laminadas 1
(4.68)
Las ecuaciones de Euler-Lagrange son obtenidas
coeficientes δu0, δv0, δw0, δφx, δφy en Ω0 a cero, independientemente.
igualando
los
:
:
:
:
:
(4.69)
Aplicando el concepto de las resultantes de tensión, esto es, integrando las
tensiones cortantes en términos del espesor del laminado, como se realizó en las Eqs
(4.48a) y (4.48b), se tiene:
,
,
(4.70)
donde Qx y Qy son los esfuerzos cortantes resultantes debido a las tensiones
transversales.
Es importante observar en la Eq. (4.62) que las deformaciones εxx, εxy, γxy, son
lineales a lo largo del espesor del laminado, mientras que γxz, γyz son constantes. De esta
forma, las tensiones correspondientes τxz y τyz, también son constantes. Entre tanto, la Teoría de
la Elasticidad nos dice que la tensión de cortadura a lo largo del espesor de la placa es
parabólica, de esta forma se concluye que la FSDT no consigue demostrar esta característica.
Esta incoherencia entre la Teoría y el modelo numérico se consigue solucionar mediante la
introducción de coeficientes de corrección para la tensión de cortadura en la Eq. (4.23), de tal
manera que:
(4.71)
donde K es el llamado factor de cizallamiento.
Muchos autores comparan y evalúan este factor de corrección, una buena aproximación
será K=5/6. De todas formas, para compuestos laminados, son muchos los factores que deberán
42
Teoría de Placas Laminadas ser analizados para el análisis de esta constante. Algunos de estos factores son: secuencia de
apilamiento, geometría del laminado, ángulo de las fibras y tipo de carga. Para cargas estáticas,
el análisis de K es más simple que en un análisis dinámico, debido a las fuerzas de inercia.
Reissner, para determinar el factor de cizallamiento, consideró la distribución de tensiones
cortantes dada por la Resistencia de Materiales.
3
2
1
2
,
2
2
(4.72)
donde Q es el esfuerzo cortante, b es el largo de la viga y h es la altura. La misma tensión para
viga, utilizando FSDT viene dada por:
(4.73)
aplicando el concepto de energía de deformación cortante con ambas teorías, tenemos:
1
3
2
5
(4.74a)
1
2
2
(4.74b)
El coeficiente de cizallamiento se obtiene de la razón entre las Eqs. (4.74b) y (4.74a),
esto es 5/6.
Owen y Figueiras [1983] presentaron un método eficiente para calcular el factor de
corrección para esfuerzo cortante, suponiendo flexión pura en dos direcciones. Este factor de
corrección es importante si cambia el material a lo largo de la dirección de espesor, como es el
caso de las estructuras tipo sándwich. Si no se produce el cambio de material a lo largo del
espesor, sino que tan sólo se modifica el ángulo del laminado, el factor 5/6 es suficiente.
La ecuación de equilibrio para una placa heterogénea, se puede expresar mediante:
0
(4.75)
Para simplificar asumimos flexión cilíndrica.
(4.76)
Donde Qx es la fuerza cortante en el plano xz.
(4.77)
43
Teoría de Placas Laminadas Donde:
es la rigidez a flexión en la dirección x.
R1:
z:
es la coordenada a lo largo del espesor.
(4.78)
g(z):
es la función de forma del cortante.
La función g(z) que modela el diagrama de tensión cortante, en el caso de una sección
homogénea, adquiere la expresión:
1
8
4
(4.79)
La energía de deformación vendría dada por:
(4.80)
donde G13(z) es el Módulo a Cortante a lo largo del espesor, en el plano xz.
La energía de deformación, suponiendo constante la deformación por cortante, vendría dada por:
(4.81)
donde:
(4.82)
donde
es el valor medio de la deformación por cortante.
Entonces será posible calcular el factor de corrección por cortante k1 en el plano xz:
(4.83)
el procedimiento es idéntico para k2.
Retornando a la Eq (4.62) y sustituyendo en (3.46b), la relación tensión-deformación de
la k-ésima lámina será:
(4.84)
Teniendo en cuenta que los coeficientes Qij vienen dados por la Eq. (3.46c), sustituyendo
la Eq. (4.84) en (4.71) y resolviendo la integral y el sumatorio, tenemos:
44
Teoría de Placas Laminadas 0
(4.85)
0
donde la rigidez extensional [Aij] es definida, haciendo (i,j=4,5), por:
(4.86)
Y finalmente, relacionando los esfuerzos resultantes para la teoría de primer orden con
los desplazamientos generalizados, se obtiene:
0
0
0
0
(4.87) 0
0
0
0
(4.88)
0
0
(4.89)
Las orientaciones de {N}, {M} y {Q} se muestran en la Fig. 4.5.
Fig. 4.5. Elemento diferencial de placa sujeto a flexión con los esfuerzos resultantes y la
distribución de tensiones según la FSDT.
45
Teoría de Placas Laminadas 4.3.4 Análisis utilizando HSDT. Teoría de Reddy.
La teoría clásica de laminados y la teoría de primer orden son las teorías más simples
dentro de las teorías de lámina equivalente. Así mismo, estas muestran satisfactoriamente el
comportamiento mecánico de la mayoría de laminados, pero no de todos. En este contexto
surgió la teoría de orden superior, basada en las mismas hipótesis que las teorías presentadas en
la secciones 4.3.2 y 4.3.3, excepto en la expansión del polinomio que representa el campo de
desplazamientos a un orden superior. La teoría de orden superior describe el comportamiento de
un laminado de forma más precisa, y distribuye mejor las tensiones a lo largo del espesor del
laminado, principalmente para las tensiones interlaminares, además de no ser necesaria la
utilización de factores de corrección, como el factor de cizalladura.
Inicialmente podría expandirse el campo de desplazamientos por un polinomio de
cualquier orden, pero el caso más común es la expansión a un polinomio de tercer orden. Dicho
esto, el motivo fundamental de expandir el campo de desplazamientos de forma cúbica es la de
obtener una variación cuadrática para las tensiones y deformaciones cortantes, a través de cada
lámina. De esta forma, la Eq. (4.34) representa el campo de desplazamientos definidos por la
HSDT de Reddy [27].
, , ,
, ,
, ,
4
3
, ,
, , ,
, ,
, ,
4
3
, ,
, ,
, , ,
(4.90)
Aplicando la Eq. (4.34) para el análisis de las deformaciones lineales y las deformaciones
angulares en régimen lineal elástico, resulta la siguiente expresión:
2
1
1
(4.91)
donde α=4/(3h2) y β=4/ h2. Con esto:
46
Teoría de Placas Laminadas (4.92)
(4.93)
En la Eq. (4.36) el primer vector contiene las deformaciones de membrana, el segundo
las curvaturas de primer orden y el tercero las curvaturas de tercer orden. En la Eq. (4.93) las
deformaciones de membrana están contenidas en el primer vector, mientras que el segundo
vector computa las curvaturas de orden superior. De esta forma:
(4.94a)
4
3
2
(4.94b)
4
(4.94c)
De la misma manera que se hizo en la teoría de Kichhoff y Mindlin para laminados,
integrando las tensiones a través del espesor – Eqs. (4.48a), (4.48b) y (4.70), se obtiene los
esfuerzos resultantes de orden superior, {P} y {R}:
,
,
,
,
47
Teoría de Placas Laminadas (4.95a)
,
,
(4.95b)
Integrando las Eqs. (4.95a) y (4.95b), se obtiene:
(4.96)
y
(4.97)
Aplicando la relación tensión-deformación en las Eqs. (3.46a) y (3.46b) para la k-ésima
lámina e aplicando a (4.92), (4.93), (4.96) y (4.97), se obtiene:
0
1
3
0
1
3
0
1
3
(4.98)
0
2
0
2
(4.99)
Aplicando los esfuerzos resultantes de primer orden y sumando las resultantes de orden
elevado, se llega:
0
0
0
1
1
1
3
3
3
y,
(4.100a)
48
Teoría de Placas Laminadas 0
0
(4.100b)
2
2
Las Eqs. (4.100a) y (4.100b) puede ser escritas de forma compacta como:
(4. 101a)
y,
(4. 101b)
con,
,
,
,
,
1, ,
,
,
,
,
(4.102a)
,
1,
,
,
(4.102b)
Los términos Aij, Bij y Dij ya fueron definidos en términos de la rigidez de la lámina Qij(k)
por las Eqs. (4.57b) y (4.86). La Eq. (4.102a) es definida para i,j=1,2,6; mientras que la Eq.
(4.102b) es obtenida computando i,j=4,5. De esta forma los demás términos de rigideces
adicionales se obtiene mediante:
1
4
1
5
1
7
(4.103)
Las matrices [E], [F] y [H] representan un orden superior a la cuarta a través del
espesor, consecuentemente, la contribución de estos términos para la solución de laminados
delgados es pequeña, mientras que para laminados de cierto espesor, la presencia de estos
términos es fundamental para la correcta distribución de tensiones a lo largo del espesor del
laminado.
49
Teoría de Placas Laminadas Los momentos y fuerzas resultantes, son definidos:
1
(4.104)
1
(4.105)
(4.106)
donde α y β representan a x e y e i=0,1,2,…,6.
Usando el Principio de los Trabajos Virtuales y procediendo de manera similar al caso
anterior, en la teoría de primer orden.
:
:
:
2
:
:
(4.107)
donde
;
2
1,4
;
;
;
3
4.3.5 Teoría de deformación trigonométrica para
placas.
La evolución de la dirección de los desplazamientos generalizados puede ser obtenida
a través de muchas funciones. Por ejemplo, el campo de desplazamientos que se muestra a
continuación, usa las funciones trigonométricas [Shimpi et al,2003] y [Ayra et al, 2002].
50
Teoría de Placas Laminadas , , ,
, ,
, , ,
, ,
, ,
, ,
, ,
, , ,
, ,
, ,
(4.108)
donde u, v son los desplazamientos de un punto cuyas coordenadas son (x,y,z), u0,v0 son los
,
y
son las
desplazamientos de un punto (x,y,0) en el plano medio, w es la flexión,
rotaciones de la normal al plano medio en torno a los ejes x, y, z.
Las deformaciones pueden ser expresadas mediante:
0
0
0
0
0
0
0
0
0
(4.109)
Las deformaciones pueden ser escritas de la forma:
(4.110)
2
(4.111)
(4.112)
(4.113)
La teoría de deformación trigonométrica satisface la condición de anulación de las
tensiones cortantes en los extremos de la placa, siendo por tanto mejor aproximación que la
teoría de primer orden.
51
Teoría de Placas Laminadas La energía de deformación virtual δU, para esta teoría es:
/
/
Ω
Ω
(4.114)
y la energía virtual de las fuerzas externas, se obtiene:
Ω
(4.115)
donde Ω representa la superficie media del laminado y q es la fuerza externa aplicada.
La energía virtual producida por las fuerzas de inercia viene expresada por:
/
Ω
/
Ω
δ
δ
(4.116)
habiéndose definido las fuerzas y momentos resultantes de la forma:
1
(4.117)
(4.118)
52
Teoría de Placas Laminadas 1
(4.119)
donde α y β representan a x e y, por tanto podemos escribir las ecuaciones de equilibrio como:
:
:
:
2
:
:
(4.120)
4.3.6 Teoría de deformación trigonométrica en zigzag para placas.
En la teoría trigonométrica en zig-zag, el campo de desplazamientos de la lámina k,
para una placa con espesor h y nl láminas, viene dado por:
, , ,
, ,
, , ,
, ,
, ,
, ,
, ,
, ,
, , ,
, ,
(4.121)
donde uk, vk son los desplazamientos de un punto cuyas coordenadas son (xk, yk, z) de la lámina
k; u0, v0 son los desplazamientos de un punto en el plano medio, w es la flexión, θx, θy son las
rotaciones en torno a los ejes y, x. Los parámetros Ak, Bk, Ck y Dk, se obtienen imponiendo la
continuidad de las tensiones transversales y los desplazamientos en cada interface, siendo
obtenidos mediante:
1
1
53
Teoría de Placas Laminadas ,
2, … ,
(4.122)
Para laminados simétricos, pueden obtenerse los parámetros de la primera lámina y
así comenzar el proceso iterativo, de la siguiente manera:
0 ;
∑
0 ;
∑
(4.123)
Las deformaciones pueden ser expresadas mediante:
(4.124)
(4.125)
donde:
;
0
0
;
;
2
0
;
0
54
Teoría de Placas Laminadas ;
0
0
(4.126)
La energía de deformación virtual δU, para esta teoría es:
/
Ω
/
Ω
(4.127)
y la energía virtual de las fuerzas externas, se obtiene:
Ω
(4.128)
donde Ω representa la superficie media del laminado y q es la fuerza externa aplicada en la
superficie media de la placa.
La energía virtual producida por las fuerzas de inercia viene expresada por:
55
Teoría de Placas Laminadas /
/
Ω
Ω
δ
δ
2
2
2
2
2
2
(4.129)
Las ecuaciones de equilibrio se obtienen usando la versión dinámica del Principio de
los Trabajos Virtuales:
:
:
:
2
:
2
2
2
2
2
2
:
(4.130)
56
Teoría de Placas Laminadas Las fuerzas resultantes de membrana, cortantes, los momentos flectores y los
términos de inercia vienen dados por:
1
Θ
Θ
(4.131)
Θ
(4.132)
1
Θ
Θ Θ
Θ
Θ
Θ Θ
Θ
Θ
Θ Θ
(4.133)
donde α y β representan a x e y, y Θ sustituye a A, B, C, D.
4.3.7 Teoría de Orden Superior de Kant.
Una de las teorías de orden superior propuestas por [Manjunatha y Kant, 1992],
presenta el siguiente campo de desplazamientos:
, , ,
, ,
, ,
, ,
, , ,
, ,
, ,
, ,
, ,
, , ,
(4.134)
57
Teoría de Placas Laminadas donde
y
primer orden
representan las rotaciones de orden superior, independientes de las rotaciones de
y .
Nótese que esta teoría, produce al igual que la teoría de Reddy, deformaciones
transversales parabólicas, lo que evita el uso de factores de corrección. Sin embargo al contrario
de lo que ocurre con la teoría de Reddy, no está garantizada la anulación de las tensiones
cortantes transversales en ±h/2. Esta teoría tiene especial acogimiento en la formulación por
elementos finitos ya que puede ser formulada con elementos finitos que tengan continuidad C0, a
diferencia que la teoría de Reddy que presenta continuidad C1. La presencia de grados de
y
, hace que esta formulación sea computacionalmente más cara que
libertad adicionales
la de Reddy.
Las ecuaciones cinemáticas para le teoría de Kant son:
0
0
0
0
0
0
0
(4.135)
donde:
;
0
0
(4.136)
3
3
0
0
0
;
0
0
(4.137)
De forma análoga a las teorías anteriores, la energía virtual de deformación viene dada por:
58
Teoría de Placas Laminadas /
/
Ω
Ω
3
3
(4.138)
y la energía virtual de las fuerzas externas, se obtiene:
Ω
(4.139)
la energía virtual producida por las fuerzas de inercia viene expresada por:
/
Ω
/
Ω
(4.140)
Considerando las fuerzas y momentos resultantes se obtienen las ecuaciones de
equilibrio:
1
(4.141)
1
(4.142)
(4.143)
59
Teoría de Placas Laminadas 1
(4.144)
:
:
:
:
:
:
3
:
3
(4.145)
4.4
Comparación entre las Teorías de Lámina
Equivalente.
Con la intención de mostrar el comportamiento mecánico de un laminado y,
principalmente, buscando una teoría de placas laminadas que represente satisfactoriamente la
solución correcta de tensiones y desplazamientos a través del espesor del laminado, las teorías
mostradas en las secciones 4.3.2, 4.3.3 y 4.3.4 son las más empleadas para tal análisis.
Las teorías de primer exigen elementos con menos grados de libertad por nodo, (cinco
son suficientes). El modelo de Kirchhoff es el más antiguo para el análisis de placas. El modelo
de Mindlin necesita el mismo número de grados de libertad por nodo que la CLPT, sin embargo
es más satisfactoria de cara a representar las tensiones cortantes. Como se ha dicho, la FSDT es
más fácilmente de implementar con elementos finitos, puesto que exige funciones de continuidad
C0. Entre tanto, los elementos presentan una rigidez excesiva llamada shear-locking.
Esa inconsistencia numérica aparece en la matriz de rigidez del elemento. Para
elementos bidimensionales, tal matriz se obtiene por una parte de la suma de la rigidez debida a
la flexión y otra debida al cortante. Con el incremento de la relación a/h, o sea, en laminados
delgados, la parte debida al cortante puede ser despreciada, en virtud de la disminución excesiva
del espesor.
Entre las numerosas teorías de orden superior, en este trabajo se utiliza la teoría de
orden superior de Reddy. Esta teoría representa de forma adecuada el comportamiento de los
60
Teoría de Placas Laminadas desplazamientos y las tensiones a lo largo del espesor del laminado. A pesar de todo, en el caso
de laminados espesos y semi-espesos la CLPT y la FSDT obtienen resultados satisfactorios y con
menor esfuerzo computacional, Como se ha mencionado, es necesario implementar elementos con
continuidad C1. También es importante destacar que el elemento HSDT, exige un número
importante de grados de libertad por nodo, siete como mínimo.
Existen otras teorías de orden superior más eficaces computacionalmente, pues necesitan
de elementos de continuidad C0. Un ejemplo de esto es la teoría de orden superior de Kant.
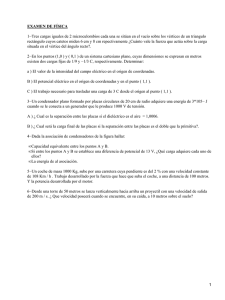
Finalmente la Fig. 4.6 representa una comparación entre las teorías explicadas.
Fig. 4.6. Comparación de la deformación conforme a las teorías CLPT, FSDT y HSDT.