Interfaces específicas
Anuncio

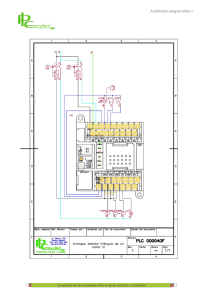
PROGRAMACIÓN DEL AUTÓMATA Tiene una serie de pasos: Determinar qué debe hacer el sistema de control y en qué orden Identificar entradas y salidas al autómata Representar mediante un modelo el sistema de control, funciones, relaciones entre ellas, y secuencia que deben seguir Asignar direcciones de entrada, salida o internas a cada componente que aparece en el sistema Llevar la representación anterior a un lenguaje de autómata programable Depurar, simular y transferir a la memoria del autómata el programa REPRESENTACIÓN DEL SISTEMA DE CONTROL La complejidad de los automatismos y la necesidad de especificar con precisión las tareas => útiles simbólicos de representación Deben ser: Comunes para emisor y receptor (comprensibles por ambos) De empleo coherente (reglas de sintaxis establecidas) Permiten formar un modelo intermedio del sistema para análisis de funcionamiento y síntesis de la solución Clasificación del modelo según los símbolos utilizados: Proposicional: Descripciones literales Algebraico: Funciones booleanas y algebraicas Gráfico: Esquemas de relés, diagramas lógicos, de flujo y técnicas de Grafcet.- Descripciones literales La descripción del proceso y el automatismo se hace por enumeración literal de las acciones, expuestas secuencialmente y con las condiciones de habilitación en cada caso Fácil de realizar (se requiere poca calificación) Poca precisión (suelen faltar especificaciones del proceso, variables e interacción entre ellas) Del ejemplo de la figura se ve: Es incompleto para efectuar el sistema de control Una descripción más exhaustiva lo hará poco legible Funciones algebraicas Acción de mando resultado de una función algebraica a partir de: Especificaciones del cliente Métodos de síntesis del Álgebra de Boole Ejemplo: Alarma S activa cuando C esté cerrado y los contactos A y B estén en estados opuestos S = (A B + A B) C Se expande definiendo operaciones entre variables de varios bits (operaciones aritméticas, de comparación, etc) Representan sistemas combinacionales y secuenciales Uso limitado en sistemas secuenciales (análisis y síntesis de difícil ejecución) Esquemas de relés Representación gráfica mediante símbolos de contactos abierto – cerrado La función de control depende de la conexión entre los distintos contactos (Ver ejemplo anterior en figura) Origen en las tecnologías electromecánicas de los sistemas de control Son deficientes para describir sistemas secuenciales complejos y señales digitales de varios bits Uso difundido en sistemas combinacionales y secuenciales sencillos por su familiaridad (electricistas) Diagramas lógicos Representación gráficas mediante símbolos normalizados que representan funciones directas del Álgebra de Boole (or, and, etc) Ejemplo de la alarma Representación compacta e independiente de la tecnología de implementación del sistema de control (eléctrica, neumática, etc) Diagramas de flujo Representación gráfica útil para describir secuencias de evolución y toma de decisiones Muy utilizado en fases iniciales del diseño Ejemplo en de un posicionamiento hidráulico manual Son claros para describir el funcionamiento general no para representar las variables señales que intervienen y las relaciones entre ellas a no ser que el modelo se complete con expresiones algebraicas que restan claridad inicial. Representación Grafcet (Grafico de Comando Etapa Transición) Combina las ventajas de la representación secuencial gráfica con los modelos preexistentes Normalizado por IEC 848 (Internacional Electrotechnical Commission) Representa las etapas de un proceso productivo, con las transiciones (condiciones) para pasar de una a otra En una etapa activa el control: Ejecuta la función de mando correspondiente Consulta las condiciones de transición Suele utilizarse en todas las fases del diseño: Especificaciones de funcionamiento o GRAFCET del pliego de condiciones Especificaciones tecnológicas o GRAFCET de movimientos Programación del autómata o GRAFCET de mando IDENTIFICACIÓN DE VARIABLES Y ASIGNACIÓN DE DIRECCIONES Con la descripción funcional del sistema => Se determinan las señales de entrada y salida, que están involucradas. Identificación y referenciación de entradas / salidas y variables internas Las variables internas que según la función serán: Variables de usuario: accesibles de la unidad de programación representan parámetros que necesita el programa Variables de cálculo intermedio o memoria Variables de consulta de estados: variables auxiliares definidas por el fabricante que reflejan estados internos del autómata Relés internos (1 bit) Temporizadores, contadores (varios bits) Identificadas las entradas / salidas y las variables internas => asignación de direcciones (Borneras de E/S y direcciones de memoria interna) Direcciones absolutas: Siempre la misma ubicación (E/S autómatas compactos y vbles. internas) Dirección en un solo campo: posición de la bornera o memoria Direcciones relativas: Según la ubicación del módulo que la contiene (E/S autómatas modulares) Dirección dos campos: Dirección del módulo sobre el bastidor Dirección el borne en el módulo Ej.: - 5.7 punto 7 dentro del módulo 5 007 punto 7 dentro del módulo 0 (TI305) LENGUAJES DE PROGRAMACIÓN Son dependientes del autómata empleado Tipo de unidad o software de programación: Literal o gráfica Son similares a los modelos de representación (facilidad en la trascripción) Clasificación: Algebraicos: Lenguajes Booleanos Lista de instrucciones Lenguajes de alto nivel Gráficos: Diagrama de contactos Diagrama de funciones / bloques Intérprete GRAFCET LENGUAJES BOOLEANOS Y LISTA DE INSTRUCCIONES Formato de las instrucciones Campo operación Operando Instrucciones típicas básicas OR AND NOT Booleanas LD OUT SET TIM CNT ADD SBB CMP SHIFT MOV Manejo de datos END JMP Gestión de programa RST Carga y asignación Contador y temporizador MUL DIV MCS Aritméticas DIAGRAMAS DE CONTACTOS (Ladder Diagram) El lenguaje de contactos expresa las relaciones entre señales binarias como una sucesión de contactos en serie y en paralelo Adoptado por muchos fabricantes de autómatas (norteamericanos y japoneses) como lenguaje base de programación Contactos de relés => componentes de dos estados (0: contacto abierto y 1: contacto cerrado) Álgebra de Boole con contactos: cualquier función lógica puede ser transcrita directa e inmediatamente a diagrama de contactos y viceversa Incluyen bloques funcionales: temporizadores y contadores Incluyen bloques funcionales complejos: para la manipulación de datos y variables digitales de varios bits Como en las extensiones al lenguaje booleano no todos los modelos acceden a la totalidad de extensiones del lenguaje DIAGRAMA DE FUNCIONES El diagrama lógico o de funciones es la representación de las tareas de automatización utilizando los símbolos contenidos en las normas DIN 40700 y DIN 40719 Incluye como bloques normalizados funciones secuenciales típicas y algunos bloques de tratamientos numéricos Ejemplo: Puerta corrediza con dos pulsadores que sirven para cerrarla o abrirla en forma indistinta. Desde la posición de abierta hasta la posición de cerrada el mecanismo demora 10 segundos. Ventajas e inconvenientes de los lenguajes vistos Listado de instrucciones Para PLC de funciones limitadas, las instrucciones son mnemónicos fáciles de entender. La carga se realiza mediante teclados básicos que pueden estar en el PLC. No requiere una interfaz gráfica. Hay dificultad para interpretar la función de un listado de instrucciones. Hay dificultad para realizar análisis y modificaciones. Diagramas de contactos Es de fácil aprendizaje para quien tiene conocimientos básicos de electricidad. La interpretación y modificación del diagrama es sencilla. Permite la incorporación de comentarios y referencias. Requiere un recurso que pueda presentar gráficos. Para la carga se requiere un software para convertir los diagramas en lenguaje de máquina. Diagramas de funciones La interpretación y modificación del diagrama es sencilla en programas chicos Permite la incorporación de comentarios y referencias. Permite la incorporación de comentarios y referencias. Requiere un recurso que pueda presentar gráficos. Para la carga se requiere un software para convertir los diagramas en lenguaje de máquina. LENGUAJES DE ALTO NIVEL Los autómatas de gamas altas realizan aplicaciones reservadas a las computadoras industriales Los lenguajes tradicionales son insuficientes para estas aplicaciones => se utilizan leguajes informáticos tradicionales convenientemente adaptados Basic (el más difundido), C, etc. Disponen de instrucciones de manipulación de cadenas de caracteres Constituyen posibilidades adicionales pero no el lenguaje básico (lista de instrucciones y diagramas de contactos) Estructuras de programación Introducción Tarea: Se define como el conjunto de instrucciones ejecutables que describen un tratamiento limitado y completo sobre variables de proceso Estructura monotarea: aplicación desarrollada sobre una tarea única, que contiene el total del programa con todas sus variables de entrada / salida y sentencias de operación Estructura multitarea: aplicación que divide el programa en subconjuntos, independientes o no, que forman tareas aisladas, normalmente en correspondencia con tratamientos particulares de la aplicación. Monotarea: Un ciclo de operación Multitarea: Múltiples ciclos de operación, uno por tarea, de desarrollo simultaneo.Tareas periódicas o no Programa Tarea Programación Lineal Programación estructurada Programación lineal El problema de control se realiza escribiendo las instrucciones según una secuencia lineal, una tras otra desde la primera a la última. La secuencia de ejecución se puede alterar mediante el empleo de instrucciones de modificación de ciclo. El programa lineal se divide en partes o bloques de ejecución condicionada. Dos tipos de instrucciones: Saltos: incluyendo las sentencias de alto nivel IF... THEN... ELSE, GOTO...WHILE, etc. Habilitación de bloques: Master Control Set / Master Control Reset, Block Program Pause, etc. Programación estructurada Se divide la tarea a programar en subprogramas o módulos, que corresponden a tratamientos parciales, y son llamados durante el escrutinio desde un programa raíz. Estos bloques están diferenciados por el tipo de tratamiento que realizan. El agrupamiento por tipo de instrucciones permiten optimizar el tiempo de ejecución, si los bloques son ejecutados sobre un sistema de coprocesadores o multiprocesadores especializados. Modular Programación estructurada Subrutinas Programación modular: La tarea está contenida en módulos independientes entre sí, cuya ejecución está organizada desde un módulo raíz, que básicamente contiene las llamadas, condicionales o no, a los módulos de programa. Uso de subrutinas: Bloques de programa de uso reiterado dentro de la ejecución; que son llamadas desde diferentes puntos del programa principal. Estructuras multitarea Tarea maestra: Lectura / escritura de E/S y programa de aplicación Tarea rápida: De ejecución opcional, es periódica y permite la ejecución de programas muy cortos Tareas de eventos: Tratamiento de eventos producidos por módulos de entrada (interrupciones) Prioridades: La tarea maestra está siempre activa, la tarea rápida interrumpe a la maestra y la tarea de evento interrumpe a las anteriores. Equipos y Software de Programación Permiten realizar la programación y proveen utilitarios y funciones como: Escribir y editar un programa en los lenguajes permitidos por el autómata Simular el funcionamiento fuera del autómata o “en línea” pudiendo incluso forzar valores de las variables. Brindan utilidades como leer programas, cambio de parámetros, etc. Permiten presentaciones gráficas y colocación de comentarios para una mejor interpretación.