Práctica 7. Gestión de emergencias y paradas
Anuncio

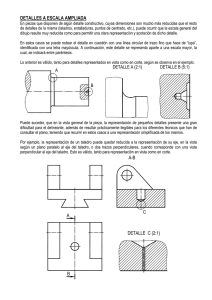
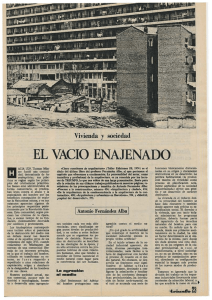
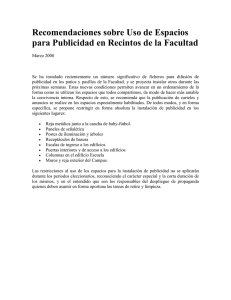
Prácticas de Automatización de Procesos Industriales Área de Sistemas y Automática Práctica 7. Gestión de emergencias y paradas En esta práctica se incluirán cuatro situaciones de parada a un proceso cuyo Grafcet y transcripción se acompaña. El proceso es el que se detalla a continuación. A una máquina de taladrar le llegan piezas de un alimentador vertical. La existencia de piezas en el alimentador se comunicará al autómata mediante una señal SHayPieza. Si el puesto de taladrado está libre, un cilindro A de simple efecto (KAlim) empujará la pieza desde el alimentador hasta dicho puesto (tarda T1 segundos en la ida y T2 en la vuelta). Hecho esto, se actúa sobre la electroválvula (VHidr+) para cerrar la reja de protección y activar el dispositivo de fijación. Cuando esta operación ha concluido, los interruptores de fin de carrera SReja y SFijación estarán accionados y entonces se conecta el accionamiento de giro del taladro (KMT). Si por alguna razón, pasado un tiempo T3 desde que se inicia el desplazamiento de la reja, los interruptores SReja y SFijación no son activados, debe iluminarse una bombilla HAviso de aviso. La bombilla se apagará al cabo de T4 segundos. Si durante o después de estos T4 segundos los interruptores SReja y SFijación se activan, el proceso continuará normalmente. Si no se activan, el proceso no evoluciona. Tras conectar el accionamiento de giro de la broca del taladro, se espera un tiempo T5 a que la broca alcance una velocidad de giro suficiente y se inicia el descenso de la broca (KDescT), comenzándose el taladrado. Para obtener una profundidad de taladro determinada, se utiliza un interruptor de fin de carrera SInf, cuya actuación provoca la elevación del taladro (KAscT). Cuando se alcanza la posición superior (SSup) se detiene dicha elevación, a la vez que se para el accionamiento de la broca (KMT). Entonces los dispositivos de fijación se liberan y se abre la reja de protección, para lo que se actua sobre VHidr- durante T6 s. Tras el taladrado, se activará un émbolo de simple efecto de expulsión de la pieza (KExp). Se supone que el recorrido del cilindro se realiza en T7 segundos en el avance y T8 en el retroceso. Existe un pulsador de arranque BArranque que se activará al comienzo de la jornada. Hasta que se produzca una parada, el puesto funcionará continuamente mientras existan piezas en el alimentador. El alumno deberá analizar el Grafcet que se adjunta y su trascripción. Durante las dos horas de prácticas se analizarán las modificaciones necesarias para incluir la gestión de las siguientes paradas en función del pulsador activado: Parada a Fin de Ciclo (pulsador BFinCiclo). o El pulsador se puede activar en cualquier momento del ciclo, y el proceso debe continuar hasta que se expulse la pieza del puesto de taladrado. El proceso se reinicia cuando se pulse BArranque Parada y situación en Posición Segura (BPosSeg). o Sólo atenderá a dicho pulsador si la rejilla ya estaba cerrada. La rejilla debe permanecer cerrada, el taladro debe llevarse (si no lo estaba) a la posición superior y la broca debe detenerse. Al pulsar BRearme debe abrir la reja. A continuación activará un actuador (KDefect) que cambiará la pista de expulsión de la pieza por considerarla defectuosa y expulsará la pieza (actuando sobre KE). Estas dos acciones se realizarán simultáneamente durante T9 s. Tras esto, volverá a la situación inicial a la espera de reiniciar la tarea pulsando BArranque. Práctica 7. Gestión de emergencias y paradas 1/ 5 Prácticas de Automatización de Procesos Industriales Área de Sistemas y Automática Parada total con congelación de la situación actual (BCong) o Se puede pulsar el botón en cualquier momento. Se desactivarán todas las salidas y no permitirá la evolución del proceso (del GRAFCET) hasta que se pulse BRearme. La congelación de la evolución no se hará incluyendo una condición adicional en cada una de las transiciones del GRAFCET. OPCIONAL: Parada total con reposición manual (BReposMan) o Se puede pulsar el botón en cualquier momento. Se desactivan igualmente todas las salidas. Tras pulsar el botón de rearme BRearme el mando de la máquina será manual. Sólo pasará a automático si se pulsa BArranque en cuyo caso la máquina se situará en posición inicial y comenzará de nuevo el proceso. Antes de comenzar el proceso, realizará la acción de expulsión de pieza considerándola defectuosa de igual forma que en el apartado anterior. SHayPieza SReja SFijación Ssup Sinf BFinCiclo BPosSeg BReposMan BCong BArranque BRearme BKA BVHidr+ BVHidrBKMT BDescT BAscT KAlim VHidr+ VHidrHAviso KDescT KAscT KMT KE KDefect E4.0 E4.1 E4.1 E4.2 E4.3 E4.4 E4.5 E4.6 E4.7 E5.0 E5.1 E5.2 E5.3 E5.4 E5.5 E5.6 E5.7 A8.0 A8.1 A8.2 A8.3 A8.4 A8.5 A8.6 A8.7 A9.0 Existe alguna pieza en el alimentador Espacio protegido por la reja La pieza ha sido fijada. Taladro ha vuelto a posición superior Taladro ha llegado a posición inferior Parar al final del ciclo Para y llevar a posición segura Parada de emergencia Parada con congelación de la situación actual Iniciar el proceso Rearmar el proceso Orden de activar/desactivar émbolo de alimentación Orden para actuar sobre reja y fijadores Orden para retornarlos a posición de reposo Orden para activar/desactivar el taladro Orden para bajar el taladro Orden para subir el taladro Activar émbolo de alimentación Actuar sobre reja y fijadores Retornar reja y fijadores a posición de reposo Anomalía en el circuito hidráulico Bajar el taladro Subir el taladro Accionamiento de la broca Émbolo de expulsión de pieza Actuador para desviar pieza defectuosa Práctica 7. Gestión de emergencias y paradas Por falta de entradas, se supondrá que E4.1 es el producto lógico de SReja y SFijación. 2/ 5 Prácticas de Automatización de Procesos Industriales Área de Sistemas y Automática Nota: El mando manual se caracterizará por una etapa desde la que se llama a una función FC1. En esta función, sin utilizar GRAFCET: • Se asignará las salidas KAlim, KDescT y KAscT a los botones BKA , BDescT, BAscT; para estos tres, se activa la salida correspondiente mientras se pulse el botón • Se asignarán las salidas VHidr+ y VHidr- a los botones BVHidr+, BVHidr-; la pulsación del primero activará la salida VHidr+ que se detiene al activarse SReja y SFijación; la pulsación del segundo activará VHidr- que se detiene pasados T6 segundos • Se asignará la salida KMT al interruptor BKMT, de dos posiciones estables (0 o 1). • Las acciones (salvo VHidr-) no se detendrán en función de temporizadores, sino cuando lo prevea el operario. • El proceso de taladrado (conectar el accionamiento de la broca o mover el taladro) se impedirá por programación mientras que los sensores SReja y SFijación estén inactivos. • Si el taladro está ascendiendo, no puede conectarse el contactor para descender y viceversa Se emplearán los tiempos T1 = 0.8 s T2 = 0.8 s T3 = 1.2 s T4 = 6 s T5 = 10 s T6 = 1 s Práctica 7. Gestión de emergencias y paradas T7 = 0.7 s T8 = 0.8 s T9 = 0.8 s 3/ 5 Prácticas de Automatización de Procesos Industriales Área de Sistemas y Automática ET0 BArranque ET1 SHayPieza KAlim ET2 Arranca T1 T1 Arranca T2 ET3 Impulso prolongado T2 VHidr+ ET4 Arranca T3 T3·(SReja+SFijac) SReja·SFijac ET5 Activa HAviso T4 s SReja·SFijac KMT ET6 Arranca T5 T5·SReja·SFijac KDesc KMT ET7 SInf·SReja·SFijac KAsc ET8 KMT SSup ·SReja·SFijac VHidr- ET9 Arranca T6 T6 ·(SReja·SFijac) KExp ET10 Arranca T7 T7 Arranca T8 ET11 T8 Práctica 7. Gestión de emergencias y paradas 4/ 5 Prácticas de Automatización de Procesos Industriales OB100 L T T DW#16#0 MW 0 AW 8 SET = "ET0" OB1 Área de Sistemas y Automática U U R S T 5 "SRejaFij" "ET6" "ET7" = "KMT" U = "ET7" "KDescT" U U U R S "ET7" "SInf" "SRejaFij" "ET7" "ET8" U = "ET8" "KAscT" U = "ET9" "VHidr-" U U U R S "ET8" "SSup" "SRejaFij" "ET8" "ET9" U = "ET10" "KExp" U U UN S R "ET9" T 6 "SRejaFij" "ET10" "ET9" U "ET2" L S5T#400MS SE T 1 U U S R "ET10" T 7 "ET11" "ET10" U U R S "ET11" T 8 "ET11" "ET1" U U R S "ET0" "BArranque" "ET0" "ET1" U U R S "ET1" "SHayPieza" "ET1" "ET2" U U R S "ET2" T 1 "ET2" "ET3" U U R S "ET3" T 2 "ET3" "ET4" U U R S "ET4" "SRejaFij" "ET4" "ET6" U UN U R S "ET4" "SRejaFij" T 3 "ET4" "ET5" U = "ET2" "KAlim" U = "ET4" "VHidr+" U U R S "ET5" "SRejaFij" "ET5" "ET6" U = T 4 "HAviso" U "ET10" L S5T#400MS SE T 7 U "ET6" O O O "ET6" "ET7" "ET8" U "ET11" L S5T#800MS SE T 8 // Salidas Práctica 7. Gestión de emergencias y paradas // Temporizad. U "ET3" L S5T#800MS SE T 2 U "ET4" L S5T#6S SE T 3 U "ET5" L S5T#10S SV T 4 U "ET6" L S5T#3S SE T 5 U "ET9" L S5T#600MS SE T 6 5/ 5