p200602647 método de posicionamiento espacial de objetos
Anuncio

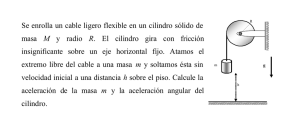
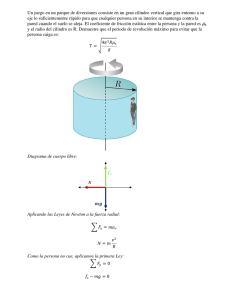
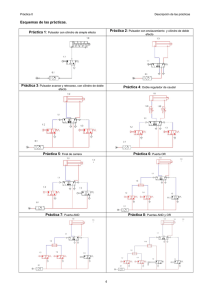
P200602647 MÉTODO DE POSICIONAMIENTO ESPACIAL DE OBJETOS CILÍNDRICOS MEDIANTE ANÁLISIS DE IMÁGENES Descripción Un grupo de investigación de la Universidad Politécnica de Madrid ha desarrollado un método para determinar la posición espacial de un objeto cilíndrico basado en el procesamiento de la imagen captada por una única cámara. Las fuentes de información que necesitan son únicamente la información de las imágenes de vídeo captadas por la cámara, el campo de visión de la misma y el diámetro del cilindro. La posición 3D del objeto cilíndrico se obtiene mediante un análisis de la sección transversal de éste y de los bordes del cilindro visualizados en la imagen captada. Esta solución resulta interesante en el campo de la cirugía laparoscópica (cuyas herramientas presentan un vástago de forma cilíndrica) con tres aplicaciones concretas: El análisis automático de intervenciones quirúrgicas para obtener parámetros de evaluación de las mismas Las aplicaciones de realidad aumentada que permitan guiar al cirujano. Los sistemas computerizados inteligentes de cirugía. Este método de posicionamiento puede resultar útil, además de en el sector médico, en otros sectores como el de producción industrial, de control o robótica. Perspectiva de un cilindro (A) en el espacio y la proyección sus bordes en el plano de la imagen (B1) y (B2), fijando el centro óptico en el punto (C). La recta perpendicular al eje del cilindro que intersecta a éste y que contiene al centro óptico, corta a dicho eje en el punto (N). El punto (P) es un punto cualquiera del eje del cilindro. Los planos de vista de los bordes del cilindro (Ω1) y (Ω2) determinan los bordes proyectados del cilindro en su corte con el plano de la imagen (Γ). Sección transversal del cilindro contenida en el plano ortogonal al eje del cilindro que pasa por el centro óptico (C) y presenta como centro el punto (N). El ángulo (2λN) es el ángulo diedro que forman los planos de vista (Ω1) y (Ω2) en dicha sección. Los vectores (uΩ1) y (uΩ2) son los vectores normales a dichos planos de vista. Innovación/Ventajas La novedad de este método de localización espacial de objetos cilíndricos es que determina la posición de cualquier punto de un cilindro analizando exclusivamente las secuencias de imágenes captadas por una única cámara. De esta forma, el método es capaz de estimar las tres componentes espaciales haciendo uso de información 2D de las imágenes captadas de forma monoscópica. Además, no necesita ningún tipo de elemento adicional en la escena, como marcadores (como ocurre en algunos sensores de posición) cosa muy interesante en el campo de la cirugía de mínima invasión. El hecho de utilizar imágenes captadas de forma monoscópica y no necesitar más elementos adicionales hace que este método resuelva los inconvenientes que presentan los sensores de localización espacial tradicionales: elimina la aparatosidad del uso de los sensores mecánicos, los problemas de interferencias con objetos metálicos de los sensores electromagnéticos así como la necesidad de un campo de visión sin obstáculos necesario con los sensores ópticos. Situación de la propiedad intelectual Patente española P200602647 concedida en 2008. Patente internacional PCT/ES2007/000579. Inventor/es Enrique J. Gómez Aguilera Dpto. Tecnología Fotónica ETSI Telecomunicación [email protected] Alicia María Cano Rodríguez Dpto. Tecnología Fotónica ETSI Telecomunicación Francisco Gayá Moreno Dpto. Tecnología Fotónica ETSI Telecomunicación Enlaces de interés http://www.gbt.tfo.upm.es/gbt.html Pablo Lamata de la Orden Dpto. Tecnología Fotónica ETSI Telecomunicación Francisco del Pozo Guerrero Dpto. Tecnología Fotónica ETSI Telecomunicación Elena Hernando Pérez Dpto. Tecnología Fotónica ETSI Telecomunicación