Cap. 14 Segmentación - Departamento de Electrónica
Anuncio

1
Capítulo 14.
Segmentación.
El procesador tiene registros de segmentación entre etapas, todas las instrucciones pasan por las
mismas etapas, y a medida en que se avanza por la cañería se va propagando el control de las
transferencias asociado a cada instrucción.
Se ejecutan varias instrucciones, que usan recursos diferentes, en forma simultánea. Se
comienza la próxima instrucción mientras se trabaja aún en otra.
La velocidad de avance está limitada por la etapa más lenta. Si las etapas no están balanceadas
en tiempo, se reduce la velocidad.
Durante el llenado y vaciado la velocidad de ejecución de instrucciones es más lenta.
La velocidad puede degradarse si existen dependencias.
14.1 Etapas:
Búsqueda de Instrucción.
Decodificación. Lectura Registros.
Ejecución.
Operación con memoria de datos.
Post-escritura en arreglo de registros.
(BI)
(Dec)
(Eje)
(Mem)
(WR)
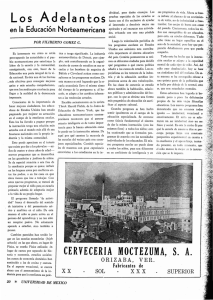
La ejecución de instrucciones puede representarse por el siguiente diagrama, donde cada
renglón representa una instrucción y hacia la derecha se muestra la evolución de la ejecución
individual:
tiempo
BI
Dec
BI
Eje
Dec
BI
Me
Eje
Dec
WR
Me
Eje
WR
Me
WR
flujo de ejecución
Figura 14.1 Flujo de ejecución de instrucciones.
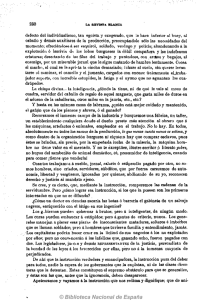
La siguiente figura ilustra las diferencias en las ejecuciones de las instrucciones en
procesadores monociclo, multiciclo y segmentado:
Profesor Leopoldo Silva Bijit
13-11-2008
2
Estructuras de Computadores Digitales
Reloj
Monociclo
Monociclo
Load
Add
Store
Reloj Multiciclo y pipeline
1
Multiciclo
BI
Dec Eje
Me
W
R
BI
Dec
Eje
Me
WR
BI
Dec
Eje
Me
WR
BI
Dec
Eje
Me
Dec Eje
BI
Me
BI
Dec
2
Pipeline
WR
Figura 14.2 Diferentes flujos de ejecución de instrucciones.
En la ejecución monociclo, el período del reloj lo establece la instrucción que más demora en
ejecutarse. A la vez este período es la suma de los tiempos asociados a cada etapa.
En el diagrama los tiempos de acceso a memoria de instrucciones y de datos se asumen iguales
y levemente mayores que la operación de la unidad aritmético lógica; la lectura y escritura de
registros, se asumen iguales y menores que el tiempo de propagación en la alu.
En la ejecución multiciclo, el período del reloj lo establece la etapa que más demora en
realizarse (acceso a memoria).
En el diagrama se aprecia que la instrucción load word demora más en ejecutarse en la máquina
multiciclo. Sin embargo la instrucción store word demora menos, y también es más rápida la
ejecución de la secuencia lw, sw, en el procesador multiciclo (el marcador uno ilustra esta
diferencia).
En la ejecución segmentada o en cañería (pipeline), asumiendo que cada instrucción ocupa las
cinco etapas, la realización individual de una de ellas demora lo mismo que la más lenta en la
ejecución multiciclo.
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
3
Se aprecia que es más rápida la ejecución de la secuencia lw, sw, en el procesador segmentado
que en el multiciclo (el marcador dos ilustra esta diferencia).
Ejemplo:
Calcular el tiempo de ejecución, en los diferentes tipos de procesadores, suponer que se ejecutan
100 instrucciones:
° Procesador monociclo
• 45 ns/ciclo x 1 CPI x 100 inst = 4500 ns
° Procesador Multiciclo
• 10 ns/ciclo x 4.6 CPI (debido a la mezcla) x 100 inst =4600 ns
° Segmentada ideal
• 10 ns/ciclo x (1 CPI x 100 inst + 4 ciclos llenado) = 1040 ns
Si T es la duración de la etapa más lenta.
Con n etapas:
I instrucciones demoran:
T* ( I + (n-1) )
llena
Figura 14.3 Cálculo del tiempo de ejecución en procesador segmentado.
En el diseño de un procesador segmentado se desea mejorar la velocidad de ejecución de una
gran cantidad de instrucciones, en lugar de optimizar la ejecución individual de las
instrucciones.
La segmentación ocupa los recursos que ya están en el procesador, sólo agrega algunos registros
para efectuar la segmentación y propagar el control.
Profesor Leopoldo Silva Bijit
13-11-2008
4
Estructuras de Computadores Digitales
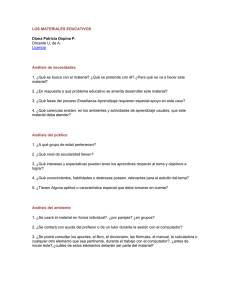
El siguiente diagrama ilustra la ejecución de instrucciones:
tiempo
(ciclos de reloj)
Instrucción 1
Cuando la instrucción 1 está en
escritura de registros WR,
la 2 está en Memoria de datos;
Instrucción 2
Instrucción 3
la 3 está en Ejecución en
Operaciones;
la 4 está en decodificación y
lectura de registros;
Instrucción 4
la 5 está en la etapa de
búsqueda de instrucción.
Instrucción 5
orden de ejecución
todas las etapas están ejecutando una
instrucción diferente en un mismo ciclo.
Figura 14.4 Ejecución de instrucciones en procesador segmentado.
Multiciclo versus segmentación.
En un procesador multiciclo interesa que el número de etapas o microciclos sea mínimo para
cada una de las instrucciones. Esto disminuye el CPI promedio.
En un procesador segmentado interesa disminuir las detenciones debidas a conflictos.
En un camino segmentado las cinco unidades funcionales independientes son:
Memoria de instrucciones para la etapa de búsqueda.
BI (fetch).
Puertas A y B de lectura del arreglo de registros para la etapa de Decodificación y
Lectura de Registros.
Reg/Dec.
Unidad aritmético-lógica para la etapa de Ejecución.
Ejec.
Memoria de Datos para la etapa de acceso a memoria.
Mem.
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
5
Puerta de escritura del arreglo de Registros para la etapa de postescritura.
Wr.
14.2. Análisis de las etapas requeridas por las diferentes instrucciones.
14.2.1. Load.
La instrucción Load requiere pasar por las cinco etapas:
lw $t1, 0($t2)
R
L
M
I
M
I
lw $t4, 0($t5)
tiempo
M
D
R
L
M
D
M
I
lw $t3, 0($t3)
M
D
R
L
Orden de ejecución
Figura 14.5 Ejecución de instrucción Load.
No hay conflictos de escritura, ya que el arreglo de registros se emplea para escritura en ciclos
diferentes. Tampoco de lectura ya que las instrucciones leen registros que permanencen con sus
contenidos sin cambios. Sin embargo la secuencia:
lw $t1, 0($t2)
lw $t4, 0($t1)
requiere usar $t1, que aún no ha sido escrito.
14.2.2. Instrucciones de tipo R.
En un procesador multiciclo las instrucciones de tipo R requieren cuatro etapas.
Si se introducen en la cañería secuencias de lw y de tipo R (con cuatro etapas), se produce un
riesgo estructural. Dos instrucciones intentan escribir en la única puerta de escritura del arreglo
de registros en el mismo tiempo.
add $t1, $t2, $t3
lw $t4, 0($t5)
add $t3, $t3, $t2
M
I
tiempo
R
L
M
I
R
L
M
I
M
D
R
L
Orden de ejecución
Figura 14.6 Ejecución de instrucción de tipo R, en cuatro etapas.
Profesor Leopoldo Silva Bijit
13-11-2008
6
Estructuras de Computadores Digitales
Una solución es insertar una operación nop entre un lw y una de tipo R. Se producen cinco
etapas nulas. Lo que degrada la velocidad de ejecución de instrucciones.
Otra solución es detener la ejecución (stall) de la ejecución de una instrucción de tipo R
siguiente a un lw, insertando una burbuja.
add $t1, $t2, $t3
M
I
M
I
lw $t4, 0($t5)
tiempo
R
L
R
L
M
I
add $t3, $t3, $t2
M
D
R
L
Orden de ejecución
Figura 14.7 Ejecución de instrucción de tipo R, con detención.
Esta solución requiere una lógica de control que resulta compleja. Se prefiere escoger la
solución de insertar un ciclo de memoria nulo en las instrucciones de tipo R. Esto implica que
las instrucciones de tipo R durarán 5 ciclos.
add $t1, $t2, $t3
lw $t4, 0($t5)
add $t3, $t3, $t2
M
I
M
I
tiempo
M
D
R
L
R
L
M
I
M
D
R
L
M
D
Orden de ejecución
Figura 14.8 Ejecución de instrucción de tipo R, con ciclo de memoria nulo.
14.2.3. Instrucción sw
Para la ejecución de la instrucción store word, en un procesador multiciclo, se requieren cuatro
etapas. En la ejecución en la cañería no es necesario agregar un ciclo nulo de postescritura, para
la instrucción store, ya que en este caso se libera el recurso (escritura en el arreglo de registros).
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
7
sw $t1, $t2, $t3
M
I
lw $t4, $t1, $t2
sw $t3, $t3, $t2
R
L
tiempo
M
D
R
L
M
I
M
D
R
L
M
I
M
D
Orden de ejecución
Figura 14.9 Ejecución de instrucción store word.
14.2.4. Bifurcación.
La bifurcación requiere cuatro etapas, si se determina la igualdad empleando la condición cero
generada por la ALU, durante la etapa de memoria de datos (nula obviamente) se actualiza el
valor de PC si debe efectuarse la bifurcación. Nuevamente no se requiere la etapa de
postescritura ya que no se usa el recurso; también la etapa nula de memoria no ocasiona riesgos
con la ejecución de otras instrucciones.
beq
$t1, $t2,
rótulo
M
I
R
L
tiempo
M
D
Orden de ejecución
Figura 14.10 Ejecución de instrucción de bifurcación, en cuatro etapas.
Para disminuir los riesgos de control es mejor solución detectar la igualdad en la etapa de
decodificación y lectura del arreglo de registros y actualizar el valor de PC, en caso de que se
efectúe la bifurcación en la misma etapa. En este caso el beq libera el recurso ALU y memoria.
beq
$t1, $t2,
rótulo
M
I
R
L
tiempo
Orden de ejecución
Figura 14.11 Ejecución de instrucción de bifurcación, en dos etapas.
Se elige esta opción, en la cual la bifurcación requiere dos ciclos para completarse. Un
razonamiento análogo se emplea para el salto incondicional (jump). Se actualizará PC en la
etapa de decodificación y lectura de registros. En este caso se libera el arreglo de registros, ya
que no se emplea.
Profesor Leopoldo Silva Bijit
13-11-2008
8
Estructuras de Computadores Digitales
M
I
j rótulo
tiempo
R
L
Orden de ejecución
Figura 14.12 Ejecución de instrucción de salto dos etapas.
14.3. Problemas de la segmentación. Riesgos de segmentación.
14.3.1. Clasificación de riesgos de datos.
Sea i una instrucción que entrará ha ser procesada y j una instrucción anterior que está en la
cañería, con Rregs( i ) el conjunto de registros que son empleados en lectura y Wregs( i ) el
conjunto(en el repertorio MIPS, es un solo registro) de registros en que se escribe en la
instrucción i, entonces:
° Existe un riesgo Read after Write en el registro r si:
r Rregs( i ) Wregs( j )
° Existe un riesgo Write after Write en el registro r si:
r Wregs( i ) Wregs( j )
° Existe un riesgo Write after Read en el registro r si:
r Wregs( i ) Rregs( j )
El siguiente diagrama ilustra los tipos de riesgos:
BI
De
c
BI
Eje
Me
De
c
BI
Eje
flujo de ejecución
De
c
BI
W
R
tiempo
RAW
W
R
Me
Eje
BI
Me
De
c
WAW
W
R
Dec
Eje
Eje
Me
Me
W
R
W
R
Figura 14.13 Tipos de riesgos.
El riesgo de tipo RAW (read after write) consiste en leer después de escribir, produce conflicto
de datos, ya que se lee el valor anterior de un registro.
El riesgo WAW (write after write) consiste en es escribir después de escribir. Se ilustra con un
tiempo largo de acceso a la memoria de datos. Produce la sobre escritura de un registro con un
valor anterior
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
9
El riesgo WAR (write after Read) escribe después lee, se ilustra con una etapa larga de
decodificación, y produce el leer el valor futuro de un registro, no usando el valor presente.
14.3.2. Tipos de riesgos(hazards)
Estructurales:
Se intenta usar el mismo recurso de dos maneras diferentes, en el mismo tiempo.
Conflicto de datos:
Se intenta usar un dato antes de que sea válido.
Ocurre cuando una instrucción depende de un dato que escribe una instrucción previa que
también está en la cañería.
Conflicto de Control:
Se intenta efectuar una decisión antes de que la condición o flag sea válida.
Todos los riesgos pueden resolverse esperando. Es decir, impidiendo que se ejecuten las etapas
de las siguientes instrucciones, hasta que se resuelva el conflicto.
La unidad de control del procesador segmentado debe detectar los riesgos, y tomar acciones
para solucionar los conflictos.
Ejemplo de riesgo estructural.
Usar, en forma compartida, una memoria para datos e instrucciones provoca un riesgo
estructural. Por ejemplo, la instrucción load, en su etapa de lectura de memoria, y el fetch de la
instrucción 4, intentan leer al mismo tiempo la única memoria.
La siguiente secuencia de ejecución de instrucciones ilustra un conflicto estructural:
M
I
Load word
R
L
M
I
Instrucción 2
R
L
M
I
Instrucción 3
M
D
R
L
M
I
Instrucción 4
tiempo
M
D
M
D
R
L
M
I
Instrucción 5
M
D
R
L
M
D
Orden de ejecución
Figura 14.14 Ejemplo de riesgo estructural.
En las unidades de memoria y registros, se sombrea la parte derecha para indicar que se está
leyendo el recurso; y se sombrea a la izquierda para indicar que se está escribiendo en el
recurso.
Profesor Leopoldo Silva Bijit
13-11-2008
10
Estructuras de Computadores Digitales
Ejemplo de Riesgo de Control.
En el siguiente camino multiciclo, y con registros de segmentación:
Figura 14.15 Ejemplo de riesgo de control.
La bifurcación se resuelve después de la etapa de ejecución; es decir se escribe en PC la
dirección de salto en la etapa de memoria, si es que se cumple la condición para realizar el salto.
La bifurcación puede realizarse o no. En caso de tomar la bifurcación ya habrán ingresado a la
cañería las dos instrucciones siguientes a la bifurcación y comenzado a ejecutarse; si no se
efectúa la bifurcación, ya se tendrá adelantada la ejecución de las instrucciones siguientes a la
bifurcación.
beq $t1, $t2, loop
add $t3, $t4, $t5
add $t3, $t6, $t3
add $t3, $t8, $t7
M
I
R
L
M
I
tiempo
M
D
R
L
M
I
M
D
R
L
M
I
este fetch es seguro
M
D
R
L
M
I
M
D
R
L
M
D
Orden de ejecución
Figura 14.16 Ejemplo de riesgo de control, en bifurcación en cuatro etapas.
Se puede solucionar este riesgo de control, deteniendo el procesamiento de las próximas
instrucciones hasta que la decisión pueda efectuarse. Esto implica tres ciclos de reloj de
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
11
detención (stall) por cada branch. No puede efectuarse fetch: durante la etapa de decodificación,
durante la etapa de cálculo del flag de cero a la salida de la alu de la instrucción beq, y durante
la escritura de PC de la instrucción beq que se efectúa en la etapa mem; sólo en la etapa WR de
la instrucción beq puede efectuarse confiablemente el fetch de la instrucción siguiente.
La detención puede lograrse evitando leer la memoria de instrucciones, mediante la
deshabilitación de WE IR y desactivando las señales de control que modifican el estado del
procesador (WrReg, MemWr); o bien, limpiando el registro IR en la etapa de decodificación del
beq. Esto intercala burbujas en la cañería. Lo cual se ilustra en el siguiente diagrama:
beq $t1, $t2, loop
M
I
R
L
tiempo
M
D
burbuja
burbuja
burbuja
M
I
este fetch es seguro
R
L
M
D
Orden de ejecución
Figura 14.17 Inserción de burbujas.
Ésta es una solución por hardware; también puede delegarse la tarea de detención al compilador,
el que debe intercalar tres instrucciones nop (no operación) después de cada beq; el diagrama
que representa esta situación es similar al visto antes, pero se está ejecutando la instrucción nop.
El texto assembler, modificado por el compilador, para asegurar la ejecución sin riesgos de
control en la cañería es el siguiente:
beq
nop
nop
nop
add
add
add
$t1, $t2, loop
$t3, $t4, $t5
$t3, $t6, $t3
$t3, $t8, $t7
Profesor Leopoldo Silva Bijit
#este fetch es seguro.
13-11-2008
12
Estructuras de Computadores Digitales
14.3.3. Solución de riesgo de control anticipando la comparación.
Puede mejorarse el diseño de la cañería, anticipando la comparación, para esto es preciso
agregar hardware, que permita generar la condición "equal" en la etapa de decodificación y a la
vez escribir el valor de PC.
En este caso:
beq $t1, $t2, loop
M
I
add $t3, $t4, $t5
este fetch es seguro
R
L
M
I
tiempo
M
D
R
L
M
I
M
D
R
L
M
D
Orden de ejecución
Figura 14.18 Riesgo con bifurcación en dos etapas.
Existen varias soluciones para este riesgo de control:
14.3.3.1. Detención.
La solución por hardware consiste en detener por un ciclo el fetch de la instrucción siguiente a
un branch.
La solución por software consiste en intercalar un nop, después de cada branch.
14.3.3.2. Bifurcaciones retardadas.
No se detiene la ejecución después de una bifurcación; es decir la instrucción siguiente a una
bifurcación comienza a ejecutarse siempre.
Esta solución (delayed branch) agrega un ciclo por cada branch, si el compilador no puede
encontrar una instrucción que sea útil, y que pueda realizarse después del branch.
14.3.3.3. Vaciamiento. (flush)
La tercera solución es efectuar el fetch, después del branch. Si el salto no se realiza, se continúa
la ejecución. Si el salto se realiza, se debe descartar la instrucción leída y volver a efectuar el
fetch.
14.3.3.4. Predicción de las bifurcaciones.
Basado en la observación que en muchos lazos repetitivos, las bifurcaciones ocurren
normalmente en el fondo de un bloque, y saltan hacia el inicio del bloque; puede predecirse que
las bifurcaciones hacia atrás tienen mayor probabilidad de ser realizadas (ésta es una predicción
estática). Un esquema más refinado es el de las predicciones dinámicas: se mantiene una
máquina secuencial que recuerda si las bifurcaciones anteriores (una, dos o más) se han o no
realizado; en caso de haberse efectuado las anteriores se asume que la próxima también se
efectuará; en caso contrario se asume que no efectuará la bifurcación. En caso de que la
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
13
suposición de no efectuarla sea incorrecta, el control debe modificar las instrucciones siguientes
a la de la bifurcación o salto para no afectar la integridad de los datos. Si el número de etapas
de la cañería es muy largo se tiende a emplear la predicción dinámica del flujo de ejecución.
El primer procesador MIPS empleó la solución por software, de intercalar nops después de los
saltos y bifurcaciones. La siguiente versión empleó el diseño de efectuar siempre la siguiente
instrucción después de un salto o bifurcación (así está implementado el simulador SPIM, en
modo raw, realiza bifurcaciones retardadas en una instrucción).
14.3.4. Más sobre bifurcaciones retardadas (Delayed Branches).
En un procesador MIPS la instrucción después de un branch se ejecuta siempre, aún cuando se
efectúe la bifurcación. En el simulador esto se logra en modo "raw".
La máquina virtual MIPS (modo no raw) no ejecuta la instrucción siguiente a la bifurcación.
Esta interpretación de las bifurcaciones permiten al compilador generar código para usar más
eficientemente la segmentación.
Por ejemplo, en el siguiente texto, el addi después del beq se ejecuta aún cuando se efectúe la
bifurcación:
.text
.globl main
main:
rótulo:
addi
beqz
addi
......
slt
$t2, $zero,0
$t1, rótulo
$t2, $t0, 1
;se ejecuta siempre
$t1, $t0, $t3
Al finalizar la etapa de decodificación del branch, se conoce si el salto tendrá o no lugar.
Sin embargo, ya se habrá realizado el fetch de la instrucción siguiente no importando si se
realiza o no el salto.
La mitad de las veces un compilador puede encontrar una instrucción útil para colocar después
de un branch, esto en promedio. Si no puede encontrar una instrucción debe intercalar una
instrucción que no haga nada (nop).
Una técnica para rellenar los huecos en la cañería es que el compilador intercale un nop después
de cada branch, y luego intente reemplazar el nop por una instrucción que pueda adelantarse.
Para esto existen diversas opciones:
a) Para encontrar una instrucción que se pueda ejecutar después del branch, se mueve hacia el
rótulo y se observa si la instrucción puede moverse en forma segura (que no haya riesgos), si es
Profesor Leopoldo Silva Bijit
13-11-2008
14
Estructuras de Computadores Digitales
posible ésta reemplaza al nop. El segmento siguiente ilustra el procedimiento, con una
bifurcación hacia adelante.
rótulo:
addi
beqz
NOP
...
addi
slt
$t2, $zero,0
$t1, rótulo
$t2, $t0, 1
$t1, $t0, $t3
El addi puede moverse ya que no tiene conflictos. El texto quedaría igual al que se mostró
antes. Esto es en caso de bifurcaciones hacia adelante; existe un procedimiento similar cuando
la bifurcación es hacia atrás.
b) Otra opción es rellenar el nop(intercalado en una primera etapa por el compilador), con una
instrucción que se encuentre antes de la bifurcación. En el ejemplo, el addi que está antes de la
bifurcación, no tiene riesgos y puede moverse, quedando:
rótulo:
beqz
addi
...
addi
slt
$t1, rótulo
$t2, $zero,0
; una que está antes rellena el hueco.
$t2, $t0, 1
$t1, $t0, $t3
No es tan difícil encontrar instrucciones para rellenar el hueco si existen instrucciones de punto
flotante, ya que éstas emplean registros separados del procesador central.
Otra técnica empleada, por los compiladores, para mejorar el tratamiento de las detenciones por
riesgos de control, es aumentar el tamaño de los bloques de instrucciones que se repiten. Una
iteración puede desenrollarse; es decir efectuar el paso i y el i+1(o más pasos, si es posible)
dentro del bloque, lo cual disminuye el número de bifurcaciones promedio realizadas para
ejecutar el lazo.
14.3.5. Conflicto de datos en operaciones de tipo R o inmediatas.
Estudiemos la ejecución de cinco instrucciones de tipo R.
El primer add escribe en $t1 en la etapa WR. Las tres instrucciones siguientes tienen conflictos
de dependencia de datos, ya que usan un valor que aún no ha sido escrito. Esto puede detectarse
en los diagramas, observando las líneas hacia atrás en el tiempo.
El and, que es la cuarta instrucción después del add, no tiene riesgos en $t1 (puede detectarse
por una línea hacia delante en la cañería).
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
15
M
I
add $t1, $t2, $t3
R
L
R
L
M
I
add $t4, $t1, $t2
tiempo
M
D
M
D
R
L
M
I
sub $t2, $t3, $t1
M
D
M
I
or $t6, $t1, $t3
R
L
M
D
M
I
and $t2, $t1, $t1
R
L
M
D
Orden de ejecución
Figura 14.19 Riesgo en secuencias de tipo R.
Si el arreglo de registros se implementa con latchs transparentes el or (la tercera después del
add) no tendría conflicto en $t1. Ya que se puede leer y escribir en el mismo registro, en el
mismo ciclo del reloj. En este tipo de registros la salida se modifica cuando cambia la entrada
(modo transparente), entonces lo que se escriba es lo que comienza a salir.
La solución de los conflictos de datos, puede realizarse mediante la anticipación de los datos.
Esto considerando que el dato que será escrito en un registro por una instrucción de tipo R o de
tipo inmediata, ya está disponible en la cañería después de terminada la etapa de operaciones.
También dicho valor está disponible al terminar el ciclo de memoria (nulo en este caso, ya que
la instrucción de tipo R o inmediata no emplea la memoria).
Esto implica modificar la ruta de datos, para que la alu pueda adquirir sus datos de entrada
desde la salida de la alu, o desde la salida de la memoria.
add $t1, $t2, $t3
add $t4, $t1, $t2
sub $t2, $t3, $t1
or $t6, $t1, $t3
and $t2, $t1, $t1
M
I
R
L
M
I
tiempo
M
D
R
L
M
I
M
D
R
L
M
I
M
D
R
L
M
I
M
D
R
L
M
D
Orden de ejecución
Figura 14.20 Solución de riesgos mediante anticipación.
Profesor Leopoldo Silva Bijit
13-11-2008
16
Estructuras de Computadores Digitales
Se detecta el conflicto de datos de las instrucciones siguientes que lean registros con una que
escriba en registros (de tipo R o inmediata pero no de tipo load word), estando la instrucción
que escribe en registros en operaciones y la que le sigue en decodificación, si el registro destino
(se denomina RD más adelante) de la que está en operaciones es igual al campo rs o rt de la que
está en decodificación. En este caso, mediante muxes, debe escribirse la salida de la alu en el
registro A (en lugar del busA) si el conflicto es con rs; o en el registro B (en lugar del busB) si
el conflicto es con rt. Puede detectarse que la que está en operaciones es de tipo R o inmediata,
ya que debe tener MemRd y MemWr iguales a cero y RegWr igual a uno.
Si se tiene en la etapa nula de memoria una operación de tipo R o inmediata que escribirá en un
registro (que se denomina RD1 más adelante), y en decodificación una operación de tipo R cuyo
campo rs o rt sean iguales a RD1, deberá anticiparse la salida de la etapa memoria hacia el
registro A o B, dependiendo de si el conflicto es con rs o rt, respectivamente.
Puede detectarse que la que está en memoria es de tipo R o inmediata, ya que debe tener
MemRd1 y MemWR1 iguales a cero y RegWr1 igual a uno.
Si en la etapa de operación y de memoria existen instrucciones que escriban en un registro que
deba ser leído por la instrucción que está en decodificación, debe adelantarse el dato que está a
la salida de la alu, por ser el más reciente.
En el diagrama, que se mostró anteriormente, se ilustran las anticipaciones desde la salida de la
alu(del valor de $t1) y de la salida de la memoria(con el valor de $t1) hacia la entrada de la alu
de las instrucciones siguientes. También se muestra, el efecto anticipatorio, del uso de registros
en base a latchs transparentes.
14.3.6. Conflicto de datos en transferencias.
La anticipación de datos hacia la unidad de operaciones resuelve los riesgos para instrucciones
de tipo R o inmediatas, pero los conflictos de datos en las transferencias no pueden anticiparse,
como se ilustra a continuación.
lw $t1, 0($t2)
add $t3, $t1, $t5
M
I
R
L
M
I
tiempo
M
D
R
L
M
D
Orden de ejecución
Figura 14.21 Riesgos en secuencia de transferencia.
En una instrucción de carga el valor que será escrito en el registro destino está disponible en la
cañería al terminar la etapa de memoria. Sin embargo, la instrucción siguiente al lw requiere
leer el registro con riesgo de datos en el ciclo anterior.
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
17
La solución de este riesgo de datos es detener el ingreso de nuevas instrucciones(detención por
hardware), o introducir nop(si se delega la detención al compilador), hasta resolver el conflicto.
Si se anticipa la salida de la memoria como entrada a la alu (como se muestra en el diagrama
anterior), es preciso detener en un ciclo; sin esta anticipación la detención es de dos ciclos.
Detención por hardware.
El siguiente diagrama ilustra la detención por hardware(stall) de la instrucción siguiente a un
load word, pudiendo ser ésta una de tipo R, bifurcación o store word, pero que lea el registro en
el que escribe la instrucción load word.
M
I
lw $t1, 0($t2)
add $t3, $t1, $t5
R
L
M
I
R
L
M
I
inicio fetch
siguiente
R
L
M
I
repite fetch
siguiente
tiempo
M
D
M
D
R
L
M
D
Orden de ejecución
Figura 14.22 Detención por hardware.
Nótese que cuando el load word está en operaciones y la siguiente en decodificación se puede
detectar el riesgo, y detener (en ese ciclo) la actualización del registro IR y del registro PC. De
esta forma cuando lw está en memoria: se anula la etapa de operación (se indica con una
burbuja, la cual debe deshabilitar los controles que modifican el estado del procesador: MemWr
y RegWr); como IR no cambió sigue estando la operación add en decodificación, y como PC no
cambió, vuelve a realizarse el fetch de la instrucción siguiente al add.
El diagrama anterior ilustra el uso de las etapas en el tiempo por cada instrucción en ejecución
(en cada ciclo del reloj deben estar presentes todas las etapas). Existe una forma alternativa de
emplear el diagrama, mostrando la ejecución individual de las instrucciones en el tiempo, en
este caso cada línea horizontal muestra la ejecución individual en las etapas. Esto se muestra a
continuación.
Profesor Leopoldo Silva Bijit
13-11-2008
18
Estructuras de Computadores Digitales
M
I
lw $t1, 0($t2)
R
L
M
I
add $t3, $t1, $t5
proceso siguiente inst.
tiempo
M
D
R
L
R
L
M
I
M
I
M
D
R
L
M
D
Orden de ejecución
Figura 14.23 Ejecución individual de instrucciones.
En el diagrama anterior se muestra que al final del ciclo de operación del load word, se detiene
el procesamiento del add(no se actualiza IR) y la instrucción siguiente(no se cambia PC).
Cuando el load word entra a su ciclo de memoria, se repite la decodificación del add y el fetch
de la siguiente al add. El esquema no muestra la etapa de operación nula en el ciclo en que se
procesa en memoria el load word.
Solución por software.
El siguiente diagrama ilustra la solución por software, en la cual el compilador intercala una
operación nop, después de cada load word.
lw $t1, 0($t2)
nop
add $t3, $t1, $t5
M
I
R
L
M
I
tiempo
M
D
R
L
M
I
M
D
R
L
M
D
Orden de ejecución
Figura 14.24 Solución por software.
Después del load word, el compilador inserta una operación nop, y ésta se ejecuta en la cañería.
La decodificación de la operación nop, debe deshabilitar los controles de escritura en registro y
en memoria. Si la siguiente instrucción al nop, lee un registro que aún no se ha escrito, puede
anticiparse el valor del contenido del registro en conflicto, que ya está a la salida de la memoria
y escribirlo en el registro A (en el caso del ejemplo); en lugar de lo leído en la etapa de
decodificación por la instrucción(ubicada dos líneas más abajo que el load word). Esto explica
que sólo sea necesario perder un ciclo del reloj, después de instrucciones load word que tengan
conflictos de datos.
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
19
Secuencia lw seguida de sw.
Una excepción a lo anterior es la secuencia lw seguida de un sw que puede resolverse, en caso
que el registro en que escribe lw sea usado para escribir en la memoria en la instrucción store
word. Esto se ilustra a continuación:
M
I
lw $t1, 0($t2)
R
L
M
I
sw $t1, 0($t3)
tiempo
M
D
R
L
M
D
Orden de ejecución
Figura 14.25 Secuencia lw seguida de sw.
Igual situación sucede en secuencias de instrucciones que escriban en un registro (tipo R o
inmediatas) seguidas de un store word que emplea el contenido de ese registro para escribir en
la memoria.
Para resolver este riesgo se requiere anticipar desde la salida de la memoria hacia el registro D
(en el diagrama que se verá más adelante) con el valor que será escrito en la siguiente etapa de
memoria. Para esto debe poderse ingresar al bus de escritura de la memoria (mediante un mux)
el contenido del busB y también la salida de la memoria (Mout), cuando se tenga en la etapa de
operaciones un sw y en la etapa de memoria: una instrucción lw o de tipo R o inmediata, y se
tenga conflicto en el registro que se escribe, con el que graba sw.
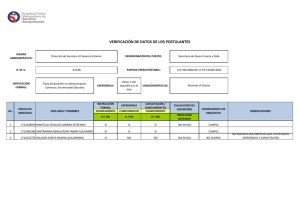
Cargas retardadas. (Delayed Loads)
Una forma de evitar las detenciones, en el caso de conflicto de datos de cargas (load) seguidas
de operaciones de tipo R o bifurcaciones, es optimizar el orden de las instrucciones mediante el
compilador. Se muestran las detenciones, debidas a cargas, para tres programas (un compilador
C (gcc), un analizador de circuitos (spice), y un procesador de textos (tex) ) con y sin
optimización.
70
60
50
%
40
detención30
20
10
0
Sin
Con
optimizar
optimización
gcc spice text
Figura 14.27 Cargas retardadas para evitar detenciones.
Profesor Leopoldo Silva Bijit
13-11-2008
20
Estructuras de Computadores Digitales
En este caso el compilador intercala un nop después de cada load word que tenga conflictos con
la instrucción siguiente. Y luego trata de reemplazarlo por una instrucción que no tenga
conflictos, ubicada antes o después del load word. Las frecuencias de detención disminuyen
apreciablemente, como puede observarse en el diagrama anterior.
14.4. Camino de datos y control.
A continuación se muestra el camino de datos y el control para un procesador segmentado en
cinco etapas. Se asume la detección de la igualdad en la etapa de lectura de registros, esto puede
hacerse si el número de etapas de segmentación es reducido.
Las señales de control se generan en la etapa de lectura de Registros y Decodificación, ciclo en
el cual se sabe cuál instrucción debe ejecutarse.
Las señales de control para la etapa de ejecución (ExtOpt, AluSrc, AluCtr) se emplean un ciclo
después y son pasadas a dicha etapa a través del registro de segmentación, que separa las etapas.
Las señales de control para la etapa de memoria (MemWr, MemRd, MemtoReg) son usadas dos
ciclos más tarde.
Las señales de control para la etapa de postescritura (RD, RegWr) se emplean tres ciclos
después. RD es el número del registro en el que debe escribirse.
El diagrama muestra el control y los datos fluyendo en la cañería.
El camino no muestra los recursos necesarios para lograr detenciones, anticipaciones y
descartes, para solucionar los riesgos, los que se verán más adelante.
Camino de datos y control del procesador segmentado (pipeline).
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
21
PCsel
COp
funct
rt
rd
IR
PC
Mem.
Inst.
Decodi
ficador
RegWr
MemtoReg
MemtoReg1
MemWr
MemRd
MemWr1
MemRd1
AluCtr
AluSrc
br j
inm16
rs
rt
ExtOp
Inm16a
RegWr2
Opera
ciones
A
Reg
B
M
br j
M
S
RD2
PC+4
RD2
RegWr2
RD1
RegWr1
RD
D
Mem.
Dat.
MDout
equal
inm16
add26
nPC
Next
PC
Figura 14.28 Camino de datos en procesador segmentado.
En un ciclo de reloj se activan simultáneamente las siguientes transferencias de control:
RD1 = RD; RegWr1 = RegWr; MemtoReg1 = MemtoReg;
MemWr1 = MemWr; MemRd1 = MemRd;
RD2 = RD1; RegWr2 = RegWr1;
A la vez se activan simultáneamente las siguientes transferencias en el camino de datos:
/* etapa de búsqueda de instrucción */
IR = MI[PC]; nPC = PC + 4; if (PCsel==0) PC = PC+4; else PC = NextPC;
/* riesgo control*/
/* etapa de decodificación */
if (Op == add) { AluCtr=”add” (010); AluSrc=”B”(0); ExtOp= ;
MemRd = 0; MemWr=0; Memtoreg = “S” (0);
RD= rd; RegWr =1; PCsel =”+4” (0) }
Profesor Leopoldo Silva Bijit
13-11-2008
22
Estructuras de Computadores Digitales
if (Op == sub) { AluCtr=”sub” (110); AluSrc=”B” (0); ExtOp= ;
MemRd = 0; MemWr=0; Memtoreg = “S” (0);
RD= rd; RegWr =1; PCsel ="+4" (0) }
if (Op == slt) { AluCtr=”slt” (111); AluSrc="B" (0); ExtOp= ;
MemRd = 0; MemWr=0; Memtoreg = “S” (0);
RD= rd; RegWr =1 ; PCsel = "+4" (0) }
if (Op == ori) { AluCtr=”or” (001); AluSrc="Op32" (1); ExtOp=”zero” (0);
MemRd = 0; MemWr=0; Memtoreg = “S” (0);
RD= rt; RegWr =1 ;PCsel = "+4" (0) }
if (Op == lw) { AluCtr="add" (010); AluSrc="OP32) (1); ExtOp="sign" (1);
MemRd = 1; MemWr=0; Memtoreg = "MDout" (1);
RD= rt; RegWr =1; PCsel ="+4" (0) }
if (Op == sw) { AluCtr="add" (010); AluSrc="Op32" (1); ExtOp="sign" (1);
MemRd = 0; MemWr=1; Memtoreg = ;
RD= rt; RegWr =0; PCsel ="+4" (0) }
if (Op == beq) {br =1; j=0; /*Señal de control br */
AluCtr="nop" (
); AluSrc= ; ExtOp= ;
MemRd = ; MemWr=0; Memtoreg = ;
RD= 0; RegWr =0 ; if(Equal) PCsel =1; else PCsel =0; }
if (Op == j ) { br =0; j=1 ;
/* Señal de control j */
AluCtr="nop" (
); AluSrc= ; ExtOp= ;
MemRd = ; MemWr=0; Memtoreg = ;
RD= 0; RegWr =0; PCsel =1 }
/* lectura de registros */
A = R[rs]; B = R[rt]; inm16a = inm16;
/*escritura de registros */
if (RegWr2 ==1) R[RD2] = M;
/* riesgo de datos*/
/* cálculo de direcciones de bifurcación y salto /*
equal = (R[rs] == R[rt]);
if ( (Op == beq) & equal ) NextPC = nPC + SignExt(inm16)*4;
if ( Op == j) NextPC = nPC&F0000000 | (add26<<2);
/* segmento de operaciones */
if (AluCtr="add" (010) & AluSrc="B" (0) ) S = A + B;
if (AluCtr="sub" (110) & AluSrc="B" (0) ) S = A - B;
if (AluCtr="slt" (111) & AluSrc="B" (0) ) if (A<B) S = 1;else S = 0;
if (AluCtr="or" (001) & AluSrc="OP32" (1) & ExtOp="cero" (0) )
S = A or CeroExt(Inm16a);
if (AluCtr="add" (010) & AluSrc="Op32" (1) & ExtOp="sign" (1) )
S = A + SignExt(Inm16a);
D = B; /* dato a escribir en memoria en sw */
/* segmento memoria de datos */
if (MemRd1 ==1)
M = MD[S];
if (MemWr1 ==1) MD[S] = D;
Profesor Leopoldo Silva Bijit
13-11-2008
/* add
/* sub
/* slt
*/
*/
*/
/* ori
*/
/* lw y sw */
Segmentación
23
if (Memtoreg1=="S" (0 ) )
M = S;
if (Memtoreg1=="Mdout" (1 ) ) M = MDout;
14.5. Solución de riesgos.
14.5.1. Unidad de anticipación de datos hacia la unidad de operaciones.
El riesgo se detecta cuando en operaciones se tiene una instrucción de tipo R o inmediata que
escriba en un registro (RD), y en decodificación una instrucción que lea el registro rs (add, sub,
ori, beq, lw) o que lea el registro rt (add, sub, beq). Nótese que no se considera en ningún grupo
a la instrucción store word que también lee rs y rt, ya que este riesgo se trata aparte.
También existe riesgo cuando en etapa de memoria se tiene una de tipo R o inmediata y en
decodificación una instrucción que lee rs o rt, con igual valor al del registro en que se escribirá
(RD1).
Para solucionar por anticipación de datos hacia la unidad de operaciones se requiere agregar
muxes a las entradas de la alu, que permitan ingresar las salidas de la alu y de la memoria,
además de los contenidos de los buses de salida del arreglo de registros (busA y busB).
Para detectar que la operación que está en la etapa de operaciones sea de tipo R o inmediata se
tiene la siguiente condición:
TipoRI = (MemWr==0) & (MemRd==0) & (RegWR==1)
Para detectar que la operación que está en la etapa de memoria sea de tipo R o inmediata se
tiene la siguiente condición:
TipoRI1 = (MemWr1==0) & (MemRd1==0) & (RegWR1==1)
Las instrucciones que leen el registro con campo rs son: add, sub, ori, lw y beq. Exceptuando la
instrucción sw que se trata aparte.
Las instrucciones que leen el registro con campo rt son: add, sub y beq. Exceptuando la
instrucción sw que se trata aparte. Notar que las inmediatas escriben en el registro indicado por
el campo rt, también lw escribe en R[rt].
Los controles de los muxes se diseñan según:
if (TipoRI ) & (lee_rs) & (rs == RD ) A = Aluout; /*AntA = 1 */
if (TipoRI1) & (lee_rs) & (rs == RD1) A = Mout; /*AntA = 2 */
if (MemRd1==1) && (Cop==”sw”) &&(rs == RD1) A = Mout;
en el resto de los casos A = R[rs];
/*AntA = 0 */
if (TipoRI ) & (lee_rt) & (rt == RD )
if (TipoRI1) & (lee_rt) & (rt == RD1)
en el resto de los casos B = R[rt];
Profesor Leopoldo Silva Bijit
B = Aluout; /* AntB = 1 */
B = Mout; /* AntB = 2 */
/* AntB = 0 */
13-11-2008
24
Estructuras de Computadores Digitales
14.5.2. Anticipación de escritura en memoria.
Las instrucciones que escriben en un registro, seguidas de un store word que escriba el
contenido del registro que aún no se ha grabado, no requieren detener la ejecución de la
escritura en memoria si se adelanta la salida de la etapa de memoria (Mout) en el registro de
segmentación que almacena el valor que será escrito en la memoria (D).
El riesgo se detecta cuando la instrucción que escribe en registro está en la etapa de memoria y
el store word en operaciones; y si el número del registro cuyo contenido debe escribirse en
memoria (RD) es igual al número del registro en que escribirá la instrucción que está en etapa
de memoria (RD1).
La señal que controla el mux que anticipa datos, para escritura en memoria, se diseña según:
if ( (MemWr == 1) & (RegWr1==1) & (RD==RD1 ) ) D = Mout; /* AntM = 1 */
en el resto de los casos D = B
/* AntM = 0 */
Esto considerando que en la decodificación de sw se almacena en el registro destino(RD) el
valor del campo rt.
14.5.3. Detención de un ciclo en secuencias: lw-alu
Esta solución impide la optimización a nivel del compilador de intercalar un nop e intentar
sustituirlo por una instrucción que no genere conflicto con el load word.
Se detecta el riesgo cuando el lw está en operaciones (MemRd en 1) y la instrucción que le
sigue (que lea el registro en el cual el lw escribe) en decodificación.
La condición para la detención está separada en dos partes:
Primero las secuencias lw seguidas por instrucciones que leen el registro rs (tipo R,
transferencias, inmediatas y beq); que se detectan por:
(MemRd == 1) & ( OP != j) & ( rs ==RD)
En segundo lugar las secuencias lw seguidas de instrucciones que leen el registro rt(tipo R y
beq) que se detectan según:
(MemRd == 1) & (Op==tipoR | Op==beq ) & ( rt ==RD)
Si la instrucción siguiente es otro load word no produce riesgos, ya que escribe en rt después
del anterior (lo sobreescribe). Si la siguiente instrucción es store word, emplea el contenido de rt
para escribir en la memoria y puede solucionarse. Las instrucciones inmediatas no leen en
registro rt; lo usan para escribir el resultado.
Juntando las dos condiciones, se tiene:
if ( ( MemRd == 1) & ( Op != j) & ( rs ==RD) |
( MemRd== 1)& ( Op==tipoR | Op==beq) & (rt ==RD)
) { burbuja = 1; válido = 0;}
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
25
en el resto de los casos burbuja = 0; válido =1;
La señal burbuja debe detener el reloj en PC e IR o inhabilitar los write enable de esos registros
(WEPC =0; WEIR = 0), esta última es mejor solución electrónica. También debe escribir en la
señal de control válido un 0, para propagar una acción nula (o burbuja) en la cañería.
Entonces: válido = ( burbuja)
14.5.4. Descarte(flush) en caso de saltos incondicionales.
En caso de no ejecutar la instrucción siguiente a un jump, que ya pasó por etapa de fetch deben
eliminarse los efectos de la instrucción siguiente, para esto basta que la instrucción que
completó su fetch no modifique un registro o escriba en la memoria. Se detecta mediante:
if ( PCsel==1)&(Op==j) flush =1;
La señal flush implica limpiar el registro IR, para que cuando se decodifique, en el siguiente
ciclo, se generen RegWr=0, MemWr=0 con lo cual se propagan acciones nulas.
Esto equivale a reemplazar la instrucción leída por un nop, en forma electrónica.
14.5.5. Descarte(flush) en caso de bifurcaciones.
En caso de no ejecutar la instrucción siguiente a un beq, que ya pasó por la etapa de fetch deben
eliminarse los efectos de la instrucción siguiente, para esto basta que la instrucción que
completó su fetch no modifique un registro o escriba en la memoria. Se detecta mediante:
if ( PCsel==1)&(Op==beq) flush =1;
También puede diseñarse, según:
if ( Equal==1)&(Op==beq) flush =1;
14.5.6. Instrucción No operación.
Esta instrucción tiene los 32 bits iguales a cero. Es de tipo R, con el campo funct = 0.
Se indica a continuación la decodificación de la instrucción nop, en caso de que el compilador
los intercale.
if (Op == nop) { AluCtr=
; AluSrc= ; ExtOp= ;
MemRd = ; MemWr=0; Memtoreg = ;
RD= 0; RegWr =0; PCsel =0; válido = 0}
además si es nop: rs=0, rt=0, rd =0.
14.6. Camino de datos con solución de riesgos.
Las ecuaciones anteriores implican modificaciones a la ruta de datos y el control, las que se
ilustran a continuación.
Profesor Leopoldo Silva Bijit
13-11-2008
26
Estructuras de Computadores Digitales
valido
PCsel
flush
COp
funct
Decodi
ficador
rt
rd
RD
RD1
RD2
RegWr
RegWr1
RegWr2
MemtoReg
MemtoReg1
MemWr
MemWr1
MemRd
MemRd1
AluCtr
IR
PC
Mem.
Inst.
AluSrc
b j
ExtOp
inm16
rs
rt
Inm16a
RegWr2
Opera
ciones
A
RD2
PC+4
Mem.
Dat.
B
M
D
equal
inm16
add26
Next
PC
M
S
MDout
AntB
AntA
nPC
Mout
AntM
burbuja
AluOut
reloj
Figura 14.29 Camino de datos en procesador segmentado, con soluciones de riesgos.
No se muestran las unidades combinacionales que generan las señales: burbuja, AntA, AntB,
AntM.
El tratamiento de excepciones también requiere efectuar modificaciones al control y a la ruta de
datos, que no se discuten en estos apuntes.
Profesor Leopoldo Silva Bijit
13-11-2008
Segmentación
27
Índice general.
CAPÍTULO 14. ...................................................................................................................................... 1
SEGMENTACIÓN. ............................................................................................................................... 1
14.1 ETAPAS: ....................................................................................................................................... 1
Ejemplo: .......................................................................................................................................... 3
Multiciclo versus segmentación. ...................................................................................................... 4
14.2. ANÁLISIS DE LAS ETAPAS REQUERIDAS POR LAS DIFERENTES INSTRUCCIONES. .............................. 5
14.2.1. Load. ................................................................................................................................... 5
14.2.2. Instrucciones de tipo R. ........................................................................................................ 5
14.2.3. Instrucción sw ...................................................................................................................... 6
14.2.4. Bifurcación. ......................................................................................................................... 7
14.3. PROBLEMAS DE LA SEGMENTACIÓN. RIESGOS DE SEGMENTACIÓN. ................................................ 8
14.3.1. Clasificación de riesgos de datos. ........................................................................................ 8
14.3.2. Tipos de riesgos(hazards) .................................................................................................... 9
Ejemplo de riesgo estructural. .............................................................................................................................. 9
Ejemplo de Riesgo de Control. ........................................................................................................................... 10
14.3.3. Solución de riesgo de control anticipando la comparación. ............................................... 12
14.3.3.1. Detención. ............................................................................................................................................ 12
14.3.3.2. Bifurcaciones retardadas. .................................................................................................................... 12
14.3.3.3. Vaciamiento. (flush) ............................................................................................................................ 12
14.3.3.4. Predicción de las bifurcaciones. .......................................................................................................... 12
14.3.4. Más sobre bifurcaciones retardadas (Delayed Branches). .................................................. 13
14.3.5. Conflicto de datos en operaciones de tipo R o inmediatas. ................................................. 14
14.3.6. Conflicto de datos en transferencias................................................................................... 16
Detención por hardware. ..................................................................................................................................... 17
Solución por software. ........................................................................................................................................ 18
Secuencia lw seguida de sw. ............................................................................................................................... 19
Cargas retardadas. (Delayed Loads) ................................................................................................................... 19
14.4. CAMINO DE DATOS Y CONTROL. ................................................................................................. 20
14.5. SOLUCIÓN DE RIESGOS. .............................................................................................................. 23
14.5.1. Unidad de anticipación de datos hacia la unidad de operaciones. ...................................... 23
14.5.2. Anticipación de escritura en memoria. ............................................................................... 24
14.5.3. Detención de un ciclo en secuencias: lw-alu ...................................................................... 24
14.5.4. Descarte(flush) en caso de saltos incondicionales. ............................................................. 25
14.5.5. Descarte(flush) en caso de bifurcaciones. .......................................................................... 25
14.5.6. Instrucción No operación. .................................................................................................. 25
14.6. CAMINO DE DATOS CON SOLUCIÓN DE RIESGOS. .......................................................................... 25
ÍNDICE GENERAL. ............................................................................................................................... 27
ÍNDICE DE FIGURAS............................................................................................................................. 28
Profesor Leopoldo Silva Bijit
13-11-2008
28
Estructuras de Computadores Digitales
Índice de figuras.
FIGURA 14.1 FLUJO DE EJECUCIÓN DE INSTRUCCIONES. .............................................................................. 1
FIGURA 14.2 DIFERENTES FLUJOS DE EJECUCIÓN DE INSTRUCCIONES. ......................................................... 2
FIGURA 14.3 CÁLCULO DEL TIEMPO DE EJECUCIÓN EN PROCESADOR SEGMENTADO. ................................... 3
FIGURA 14.4 EJECUCIÓN DE INSTRUCCIONES EN PROCESADOR SEGMENTADO.............................................. 4
FIGURA 14.5 EJECUCIÓN DE INSTRUCCIÓN LOAD. ...................................................................................... 5
FIGURA 14.6 EJECUCIÓN DE INSTRUCCIÓN DE TIPO R, EN CUATRO ETAPAS. ................................................. 5
FIGURA 14.7 EJECUCIÓN DE INSTRUCCIÓN DE TIPO R, CON DETENCIÓN. ...................................................... 6
FIGURA 14.8 EJECUCIÓN DE INSTRUCCIÓN DE TIPO R, CON CICLO DE MEMORIA NULO. ................................ 6
FIGURA 14.9 EJECUCIÓN DE INSTRUCCIÓN STORE WORD. ........................................................................... 7
FIGURA 14.10 EJECUCIÓN DE INSTRUCCIÓN DE BIFURCACIÓN, EN CUATRO ETAPAS. .................................... 7
FIGURA 14.11 EJECUCIÓN DE INSTRUCCIÓN DE BIFURCACIÓN, EN DOS ETAPAS............................................ 7
FIGURA 14.12 EJECUCIÓN DE INSTRUCCIÓN DE SALTO DOS ETAPAS. ........................................................... 8
FIGURA 14.13 TIPOS DE RIESGOS. .............................................................................................................. 8
FIGURA 14.14 EJEMPLO DE RIESGO ESTRUCTURAL. .................................................................................... 9
FIGURA 14.15 EJEMPLO DE RIESGO DE CONTROL. ..................................................................................... 10
FIGURA 14.16 EJEMPLO DE RIESGO DE CONTROL, EN BIFURCACIÓN EN CUATRO ETAPAS. ........................... 10
FIGURA 14.17 INSERCIÓN DE BURBUJAS. .................................................................................................. 11
FIGURA 14.18 RIESGO CON BIFURCACIÓN EN DOS ETAPAS. ....................................................................... 12
FIGURA 14.19 RIESGO EN SECUENCIAS DE TIPO R. .................................................................................... 15
FIGURA 14.20 SOLUCIÓN DE RIESGOS MEDIANTE ANTICIPACIÓN. .............................................................. 15
FIGURA 14.21 RIESGOS EN SECUENCIA DE TRANSFERENCIA. ..................................................................... 16
FIGURA 14.22 DETENCIÓN POR HARDWARE. ............................................................................................ 17
FIGURA 14.23 EJECUCIÓN INDIVIDUAL DE INSTRUCCIONES....................................................................... 18
FIGURA 14.24 SOLUCIÓN POR SOFTWARE. ................................................................................................ 18
FIGURA 14.25 SECUENCIA LW SEGUIDA DE SW. ........................................................................................ 19
FIGURA 14.27 CARGAS RETARDADAS PARA EVITAR DETENCIONES. .......................................................... 19
FIGURA 14.28 CAMINO DE DATOS EN PROCESADOR SEGMENTADO. ........................................................... 21
FIGURA 14.29 CAMINO DE DATOS EN PROCESADOR SEGMENTADO, CON SOLUCIONES DE RIESGOS. ............ 26
Profesor Leopoldo Silva Bijit
13-11-2008