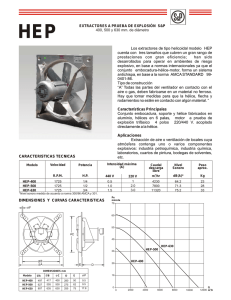
113 ANEXOS ANEXO 1. DIAGRAMA DE FUNCIONAMIENTO DEL
Anuncio

113 ANEXOS ANEXO 1. DIAGRAMA DE FUNCIONAMIENTO DEL MOTOR DIESEL 1.1 Notas Generales El diagrama de funcionamiento del motor diesel sirve como base para cierto número de cálculos, pero una de sus funciones más importantes es indicar los límites de la potencia al freno (PB) y de velocidad (n) que deben ser observados; por ejemplo en diferentes aplicaciones navales. Figura 1.1. Estructura del Diagrama de Funcionamiento de un Motor Diesel La Figura 1.1., muestra el esquema de un diagrama típico de funcionamiento de un motor diesel, con sus designaciones. Este diagrama puede dividirse en varias zonas: - envolvente de funcionamiento, - área de funcionamiento, - curva de la hélice, y 114 - adaptación de la aplicación. Envolvente de funcionamiento La envolvente marca el área de funcionamiento del motor diesel y esta limitada por la línea límite de Potencia Máxima Continua (MCR). En la parte izquierda el límite esta constituido por la velocidad mínima (n), la más baja a la que el motor diesel puede funcionar. Esta velocidad no debe confundirse con la velocidad mínima para embregue, que es ligeramente mayor. La línea entre la velocidad mínima y el punto de ajuste muestra el límite operativo determinado por los esfuerzos térmicos, mecánicos y/o debidos a la combustión. El lado superior esta constituido por la potencia con combustible bloqueado o potencia nominal (100% de la potencia al freno). En función de la aplicación y del TBO elegido, se limitará la potencia máxima disponible a la salida del motor diesel. El rango de velocidades en el que puede obtener la potencia con combustible bloqueado se denomina margen para funcionar a la potencia nominal por encima de cierta velocidad. El punto más a la izquierda de este margen es el punto de ajuste. A la izquierda de este punto el motor diesel no puede desarrollar la potencia nominal. Algunas veces este tipo de potencias, donde la potencia disponible esta limitada por el controlador del motor diesel de llama rango plano. El límite del lado derecho esta constituido por la velocidad nominal (100% de la potencia del motor diesel). 115 Área de funcionamiento El área de funcionamiento está dividida en varias áreas, en función del comportamiento operativo de las turbosoplantes. En el caso de sobrealimentación secuencial, se muestra el estado de la turbosoplante. I, II: Estado de la sobrealimentación secuencial II, UMBL: Los valores del funcionamiento del motor diesel pueden ser mejorados mediante uso de algún dispositivo de soplado en el interior de la conexión de la turbosoplante de gases de escape. Después de la conexión de la segunda turbosoplante, el aire de sobrealimentación pasa sobre el colector de gases de escape controlado por la electrónica del motor diesel para aumentar la masa de aire que pasa a través de la turbina. En combinación con la situación mejorada de la línea de funcionamiento o de trabajo en relación con el rendimiento del compresor, se obtiene una mayor presión de trabajo, y, como consecuencia, se mejoran los valores de funcionamiento del motor diesel. Las áreas están separadas por las Líneas Límite de Conexión de las Turbosoplantes donde los interruptores de control del motor diesel pasan de un estado a otro. Esta conexión no tiene lugar a una relación fija de potencia – velocidad, sino en un cierto rango de velocidades, para evitar la conexión permanente si el motor diesel trabaja en la cercanía de la línea límite. Esta da como resultado un comportamiento específico del motor diesel. Sí el motor diesel funciona sobre una curva de carga desde la línea de potencia Nominal a vacío o viceversa, los puntos de carga serán ligeramente distintos. El funcionamiento normal del motor no se verá afectado pero en las pruebas de aceptación este comportamiento debe ser tenido en cuenta. Debe evitarse el funcionamiento continuo en la línea de conexión de las turbosoplantes. Curva de la Hélice En la Figura 1.1, se muestra una curva sencilla de la hélice con su punto de proyecto en la Potencia nominal (100%) a la Velocidad Nominal (100%). La diferencia entre la curva de la hélice y la curva MCR se llama Reserva para Aceleraciones. Esta reserva puede usarse durante periodos de funcionamiento dinámicos. 116 La curva de la hélice en el diagrama de funcionamiento del motor diesel muestra solamente la situación estacionaria, cuando todas las fuerzas están equilibradas. En este caso, el motor diesel “se mueve solamente” sobre la curva de la hélice y todos los restantes puntos en el área de funcionamiento están fuera del funcionamiento teórico porque no existe relación posible potencia – velocidad. En una situación no estacionaria, esta situación cambia de forma ostensible. Comenzando desde un punto estacionario, el motor diesel tiende a acelerarse. La velocidad del motor diesel aumenta, y, consecuentemente, la de la hélice. Pero la relación entre la velocidad de la hélice (n) y la velocidad del buque (v) no está equilibrada. La hélice intenta moverse más deprisa para mover el buque más rápidamente y absorbe más potencia que en una situación de equilibrio. Para el motor diesel la pendiente de la curva de la hélice tiende a aumentar. En esta situación la potencia de salida del motor diesel a determinada velocidad (n) puede ser mayor que la correspondiente a una situación estacionaria. Sí la aceleración es demasiado rápida la curva MCR actuará como límite. De forma general, una gran reserva para aceleraciones permite una rápida maniobrabilidad sí el reductor u la línea de ejes están proyectados para esta aplicación. 1.2. Curvas de Carga Figura 1.2.1. Monocasco (desplazamiento del buque sin planeo) Existe solo una pequeña diferencia entre las curvas de la hélice teórica e individual (Figura 1.2.1). 117 En la Figura 1.2.2., el rango de velocidades del buque ha sido aumentado y la curva individual de la hélice comienza a tomar forma de montículo. El buque se mueve desde pleno desplazamiento a la situación de planeo. Se agrega la curva teórica sin planeo para mostrar que la resistencia del buque disminuye considerablemente cuando tiene lugar el fenómeno del planeo. Las diferencias entre las curvas de las hélices individual y teórica, son obvias. El planeo depende de muchos factores tales como el tamaño del buque y la velocidad del mismo, y puede verse influenciado por las formas del casco. Un buque proyectado para el planeo se moverá más rápidamente en este estado que otros buques. Así pues, no estará claro como se comportará el buque si no se conoce para qué estado se ha proyectado. Figura 1.2.2. Monocasco (buque de desplazamiento con planeo) 118 Figura 1.2.3. Catamarán (multicasco, nunca planeando) Aquí se pueden apreciar formas de tipo catamarán o trimarán que nunca entrarán en fase de planeo debido a su calado y a su pequeña área de planeo. La cresta o montículo que presenta su curva es debido a la interacción de las olas entre los cascos. 119 ANEXO 2: EJEMPLOS DE CÁLCULO DE COMBUSTIBLE 2.1. Ejemplo nº 1 (Motor MTU Serie 2000) Basándonos en algunos datos, como ejemplo, calcularemos el consumo de combustible. Los datos disponibles son: 120 121 Los siguientes ejemplos muestran algunas aplicaciones del cálculo de los consumos de combustible: 2.1.1. Consumo de combustible en la condición de proyecto Motor propulsor principal diesel. PB = 990 kW (Tabla, paso 5) be = 0,218 kg/kWh (Tabla, paso 6) Adición del 1,5% por condiciones ambientales y del 5% por la tolerancia be = 0,218 kg/kWh + 1,5% + 5% = 0,232 kg/kWh ρfuel = 830 kg/m3 Grupo diesel – generador. Pmecánica = Peléctrica/ηGen = 125 kW/0,942 Pmecánica = 133 kW (Tabla, paso 10) be = 0,225 kg/kWh (Tabla, paso 10) (El valor incluye las tolerancias y la corrección por condiciones ambientales) ρfuel = 830 kg/m3 (Tabla, paso 8) El consumo total de combustible (motor propulsor diesel y 1 grupo generador. 122 2.1.2. Volumen del tanque de combustible para una autonomía dada ¿Cual es el volumen del tanque de combustible para una autonomía de 500 millas náuticas (sm) a 18 nudos (kn)? scr = 500 millas (sm) vcr = 18 nudos (kn) PB = 390 kW por buque y por motor diesel propulsor (Tabla, paso 4) nhélice = 470 rpm (velocidad del eje de la hélice) (Tabla, paso 4) ndiesel = 1632 rpm (velocidad del motor diesel propulsor) (Tabla, paso 9) be = 0,203 kg/kWh + 1,5% + 5% = 0,215 kg/kWh (Tabla, paso 6) El consumo de combustible puede calcularse como en el ejemplo (1) El consumo total de combustible (motor propulsor diesel y 1 generador). Autonomía teórica de crucero. Volumen de combustible para la autonomía de crucero. 123 Volumen necesario del tanque: 2.1.3. Autonomía teórica de crucero ¿Cuál es la autonomía teórica de crucero a 12 nudos (kn) y con un tanque de combustible de 5 m3? Vtank = 5 m3 Vfuel = Vtank x 0,95 = 4,75 m3 (Tabla, paso 11) vcr = 12 nudos (kn) PB = 145 kW por buque y motor diesel propulsor (Tabla, paso 4) nhélice = 330 rpm (velocidad del eje de la hélice) (Tabla, paso 4) ndiesel = 1146 rpm (velocidad del motor diesel propulsor) (Tabla, paso 9) be = 0,208 kg/kWh + 1,5% + 5% = 0,222 kg/kWh (Tabla, paso 6) El consumo de combustible puede calcularse como en el ejemplo (1) Consumo total de combustible (motor propulsor diesel y 1 grupos). 124 Autonomía teórica de crucero. 2.1.4. Consumo de combustible anual para un perfil operativo Perfil operativo: (como se ha definido en la tabla, paso 12) Velocidad del Periodo de buque tiempo (v) (t) (%) (%) 10 20 24 70 27,5 10 Datos del buque: (tabla, pasos 4 y 9) Con la relación de reducción (tabla, paso 9) y la velocidad del eje de la hélice, se ha calculado la velocidad del motor diesel (n). Velocidad del Velocidad de Potencia del Velocidad del buque (v) la hélice buque al freno motor diesel (%) (rpm) (kW) (rpm) 10 270 85 938 24 590 690 2049 27,5 670 990 2300 Datos del motor diesel: (tabla, paso 6) Con la potencia al freno del motor (PB) y la velocidad (n) se entra en el diagrama de funcionamiento del motor (tabla, paso 6) y se tienen los consumos específicos de combustible, corrigiéndose según lo especificado. 125 Velocidad Velocidad Potencia del del buque del motor motor diesel be (bruto) be (corregido) (v) diesel (n) (PB) (kg/kWh) (kg/kWh) (kn) (rpm) (kW) 10 938 85 0.220 0.234 24 2049 690 0.203 0.216 27.5 2300 990 0.218 0.232 Consumo de combustible. Velocidad Potencia al del buque freno del be Periodo de B (v) buque (PB) (kg/kWh) tiempo (t) (%) (m3/h) (kn) (kW) 10 85 0.234 20 0.0048 24 690 0.216 70 0.1257 27.5 990 0.232 10 0.0277 Total 0.1582 El consumo total de combustible (motor propulsor diesel y 1 generador). El consumo de combustible anual basado en una utilización estimada de 500 horas. 126 2.1.5. Corrección por el poder calorífico inferior del combustible Sí el poder calorífico de un combustible dado no cumple con el valor requerido, los datos deben corregirse. Utilizar el siguiente procedimiento: 127 ANEXO 3: HÉLICE 3.1. Curva de la hélice 3.1.1. Generalidades Cuando un buque está siendo remolcado y no está equipado con una hélice, la fuerza necesaria para el remolque se llama resistencia (R) y la potencia necesaria para remolcar el buque a cierta velocidad (v) es: donde: PE = Potencia efectiva, en kW RT = Resistencia total en kN v = Velocidad del buque en m/s La base de partida para el proyecto de una hélice es la curva de potencia efectiva (PE) del buque, mostrando la relación entre la potencia efectiva y la velocidad del buque (v). La curva de potencia efectiva es evaluada mediante pruebas o bien estimada para una condición determinada, por ejemplo, normalmente, para la condición de pruebas. Ejemplo: Condición de Pruebas para aceptación del buque - Buque nuevo, casco limpio - Estado de la mar 0 -1 (aguas en calma), fuerza del viento: Beaufort 2 – 3 - Condición de carga (definida, por ejemplo, a plena carga) - Inexistencia de corrientes de agua La carga del dispositivo propulsor o hélice para alcanzar la potencia efectiva es llamada potencia entregada (PD) y la relación entre la potencia efectiva y la potencia entregada es llamada rendimiento propulsivo (ηD). 128 donde: ηD = rendimiento propulsivo PE = Potencia efectiva, en kW PD = Potencia entregada, en kW El rendimiento propulsivo es el producto de: - Rendimiento del propulsor aislado (η0), dependiente del tipo, tamaño, velocidad; por ejemplo, en el punto de proyecto, aproximadamente η0 = 0,60 – 0,75 - Rendimiento del casco (ηH) dependiente del coeficiente de estela y del coeficiente de succión (en el punto de proyecto, aproximadamente 0,90 – 1,10) - Rendimiento rotativo relativo (ηR) dependiente del rendimiento de la hélice detrás del buque y del rendimiento del propulsor aislado (en el punto de proyecto, aproximadamente, 0,95 – 1,02) donde: η0 = Rendimiento del propulsor aislado ηH = Rendimiento del casco ηR = Rendimiento rotativo relativo ηD = Rendimiento propulsivo La potencia efectiva requerida del buque no depende solamente de la velocidad del buque (v), sino también de las condiciones ambientales (viento, estado de la mar), rugosidad del casco (limpio, sucio), así como de la condición de carga del mismo. 129 Fig. 3.1.1. Influencia del cambio en la resistencia en la curva de potencia efectiva (Ejemplo) Fig. 3.1.2. Paso de la curva de potencia efectiva a potencia entregada (ejemplo) 130 Partiendo de la base de una potencia efectiva definida (Figura 3.1.2., parte 1) se proyecta una hélice. La relación entre potencia entregada (PD) y velocidad del buque (v) o velocidad de la hélice (n) se muestran en sendos diagramas sencillos o bien en un solo diagrama utilizando ambos parámetros como ejes de coordenadas. La Figura 3.1.2., partes 2 a 4, muestran algunos ejemplos. El diagrama con la velocidad de la hélice (n) como abscisas (Eje X) tiene la ventaja de que el diagrama de características del motor diesel puede ser dibujado en el mismo diagrama. Cada cambio en la curva de la potencia efectiva puede apreciarse también en la curva de la hélice. El ejemplo de la Figura 3.1.3., muestra que, debido a que la curva de la hélice suele ser una cúbica, pequeños cambios en la curva de la hélice pueden dar lugar a grandes consecuencias. Fig. 3.1.3. Efectos del cambio de la resistencia sobre la potencia entregada (ejemplo) Pese a que las curvas de las Figuras 3.1.1., y 3.1.3., son de forma similar, en realidad son muy diferentes. Las potencias efectiva y entregada están relacionadas con el rendimiento propulsivo (ηD). Esto significa que la curva de la hélice solamente es válida para cada proyecto de hélice. Cuando cambia la geometría de la hélice (por ejemplo, el diámetro, el área, el paso o el número de palas), cambia también la relación potencia – velocidad a una nueva relación, en resumen, a una nueva curva de la hélice. Sí la curva de la potencia 131 efectiva cambia, por ejemplo, de la condición de casco limpio y buen tiempo a casco sucio y malas condiciones atmosféricas, también cambiará la curva de la hélice. Todo esto nos lleva a la siguiente conclusión: cualquier cambio en la curva de la hélice puede ser debido al propio buque (potencia efectiva) o a una modificación de la hélice. La curva de la hélice tiene una relación fija con la curva de la potencia efectiva y solamente será influenciada por el buque (potencia efectiva). Cada paso posible tiene su propia relación fija con la curva de potencia efectiva. Esto conduce a múltiples curvas para una sola hélice (Figura 3.1.4.). La curva de la hélice puede verse influenciada por el buque (potencia efectiva) y por el paso de la hélice. Fig. 3.1.4. Efectos de diferentes pasos de la hélice en la potencia entregada (ejemplo) El diferente comportamiento tiene distintas consecuencias en el proyecto de la hélice elegida. 132 3.1.2. Curva teórica de la hélice El diámetro (D), la potencia entregada (PD) y la velocidad del eje (n) de la hélice pueden ser calculados por el fabricante de la misma, siempre que sean conocidas la curva de la potencia efectiva, y hayan sido seleccionadas la velocidad de proyecto (v) y la potencia al freno instalada (PB). La potencia y la velocidad de la hélice (n) deben ajustarse a la potencia del motor diesel instalado. Sí solamente se conoce el punto de proyecto de la hélice o el motor diesel, mediante la expresión siguiente puede calcularse una aproximación de la curva teórica de la hélice. donde: PD = Potencia entregada, en kW PD’ = Potencia ajustada entregada, en kW nprop = Velocidad de la hélice, en rpm n’prop = Velocidad ajustada de la hélice, en rpm (GEOMETRÍA DE HÉLICE DE PASO FIJO) donde: PB = Potencia del motor diesel al freno, en kW PB’ = Potencia ajustada del motor diesel al freno, en kW nprop = Velocidad de la hélice, en rpm n’prop = Velocidad ajustada de la hélice, en rpm (GEOMETRÍA DE HÉLICE DE PASO FIJO) El motor diesel y la hélice tienen una relación fija a través del eje de la hélice, por lo que la ecuación puede usarse tanto con PB como con PD. 133 Existen diferencias entre esta aproximación y la curva real, en función de las formas del casco que es un factor decisivo, y sobre todo, teniendo en cuenta, que se ha tomado la geometría de la hélice de paso fijo. Esto implica que la aproximación para una hélice de palas orientables sólo es válida para un paso fijo y determinado. Existe otra restricción para el rango inferior de velocidades. Por debajo de cierta velocidad (v) las fuerzas del viento pueden llegar a ser dominantes y la potencia entregada no puede disminuir más. 3.1.3. Estimación de la potencia necesaria del motor diesel requerido En ciertos casos, la potencia necesaria al freno del motor diesel (PB) para un buque determinado, debe ser estimada en una etapa preliminar del proyecto, cuando solo se dispone de estimaciones de la potencia efectiva (PE) o de la resistencia total (RT). Con las ecuaciones de potencia anteriormente vistas, se puede hacer una estimación preliminar “grosera” de la potencia al freno necesaria del motor diesel (PB) para una velocidad dada del buque (v) o donde: PB = Potencia total al freno del motor diesel, en kW PE = Potencia efectiva, en kW RT = Resistencia total a la velocidad del buque (v), en kN V = Velocidad del buque, en nudos (kN*0,5144 = m/s) 134 ηD = Rendimiento propulsivo ηm = Rendimiento mecánico En el punto de proyecto o diseño, se puede usar la siguiente expresión para calcular los rendimientos: ηm = 0,97, ηD = 0,60 El resultado es la potencia total al freno del motor diesel (PB) para el buque. Este valor debe ser distribuido en el número deseado de motores diesel. 135 3.2. Geometría de la hélice Para entender la acción hidrodinámica de una hélice es imprescindible tener un minucioso conocimiento de la geometría básica de este elemento y de las correspondientes definiciones. La Figura 3.2.1., muestra que se entiende por lanzamiento axial de la pala y el lanzamiento circunferencial de una hélice. El uso del lanzamiento circunferencial se ha demostrado muy efectivo en la reducción de esfuerzos vibratorios, vibraciones inducidas por la presión del casco, y en retrasar el desarrollo de la cavitación. Con el lanzamiento axial, los esfuerzos sobre la pala pueden controlarse y pueden utilizarse secciones de pala ligeramente más delgadas, lo que puede ser ventajoso desde el punto de vista de consideraciones hidrodinámicas de la propia pala. Fig. 3.2.1 Esquema de la geometría de la hélice (lanzamiento circunferencial y lanzamiento radial) Cada hélice precisa de un núcleo para fijar las palas de la hélice y para ubicar el mecanismo de control de las mismas en el caso de hélices de palas orientables (CPP). Esto da como resultado diferentes tipos y tamaños de núcleos para hélices de palas fijas (FPP) y para las hélices de palas orientables (CPP), y es una característica diferencial entre ambos tipos de hélices. Otra diferencia es la relación de área proyectada – área disco (A/A0). La relación del área proyectada - área disco es simplemente el área de la pala, proyectada sobre un plano normal al eje de la hélice, dividida por el área del disco de la hélice (A0). Dado 136 que las hélices de palas orientables son totalmente reversibles en el sentido de que las palas pueden pasar a través de la condición de paso 0, se debe prestar atención a que las palas no interfieran entre sí. Con igual número de palas, una hélice CPP tendrá una relación de área proyectada – área disco ligeramente inferior. La expresión (P/D) se conoce, de forma general, como relación paso - diámetro. Otra opción es que sea conocido el ángulo de paso θ. Debido a la geometría de la pala, el ángulo de paso varía desde el núcleo hasta la punta de la pala. D = Diámetro de la hélice, en metros R = Radio de la hélice, en metros r = Ubicación del radio de la hélice, en metros x = Ubicación adimensional del radio de la hélice (r/R) De forma general, el ángulo de paso característico, se define a una relación de la hélice de x = 0,7 Existen varias definiciones de paso y la distinción entre las mismas es fundamental para evitar errores analíticos: 1 Paso raíz - punta 2 Paso de la cara o pala La línea recta que conecta las extremidades de la raíz y de la punta de la pala, se llama línea de paso raíz – punta. Los ángulos de la sección de ataque están definidos en relación a la línea raíz – punta. La línea de paso de la cara o pala es básicamente una tangente a la sección de la superficie del lado de presión, y pueden trazarse muchas líneas que cumplan esta definición. Consecuentemente, la definición no es clara. Se utiliza muy raramente, pero puede encontrarse en planos antiguos, como los de la serie B de Wageningen. 137 Fig. 3.2.2. Definiciones de paso de una hélice La ecuación siguiente puede usarse para convertir el paso de P/D a θ o viceversa. P/D = Relación paso de la hélice/ Diámetro de la hélice x = Ubicación adimensional del radio de la hélice (r/R) Θ = Ángulo de paso 3.3. Selección del tipo de hélice 3.3.1. FPP o CPP La selección de una hélice para una aplicación particular es el resultado de la consideración de diferentes factores. Estos factores pueden determinarse para conseguir el máximo rendimiento respecto a: - Limitación de ruido - Facilidad de mantenimiento - Coste de la instalación, y así sucesivamente. 138 Cada buque debe ser estudiado y considerado en relación con su aplicación especial. La elección entre una hélice de paso fijo (FPP) y una hélice de palas orientables (CPP) ha constituido durante muchos años un gran debate entre los componentes de los sistemas implicados. Las hélices de palas orientables (CPP) tienen predominio total en buques Roll On – Roll Off (Ro-Ro), ferries, y en el sector de los remolcadores de más de 1.500 Kw. de potencia propulsora instalada con un perfil operativo que puede ser satisfecho mejor con una hélice CPP que con un reductor de dos velocidades o inversor. Para las restantes aplicaciones, la solución sencilla de hélices de paso fijo, parecen ser, en principio, une solución satisfactoria. Comparando la fiabilidad entre la solución sencilla de una hélice FPP y la solución, mecánicamente más compleja, de una hélice CPP, se ha demostrado que las hélices CPP han conseguido un estatus excelente como componente esencial de la propulsión. La hélice CPP tiene la ventaja de permitir el funcionamiento de la hélice a velocidad constante. Pese a que esto conduce a una pérdida de rendimiento, también es cierto que permite el uso de generadores accionados por el eje de cola, en el caso de que este sea un requisito del perfil operativo del buque. Durante los últimos años la propulsión eléctrica con propulsores del tipo POD ha emergido en el mercado. Sin la necesidad de disponer de reductor y con la controlabilidad del motor eléctrico, una hélice de paso fijo parece ser la mejor opción. Pero no debe olvidarse la comparación del costo económico de un control extendido de un motor eléctrico con el costo de una hélice CPP. 3.4. Tamaño de la hélice La determinación del diámetro de la hélice (D) para una cierta potencia entregada (PD) a una velocidad de la hélice (n) y una velocidad del buque (v) es un trabajo complejo. Para algunas hélices existen procedimientos de cálculo, que pueden encontrarse en la literatura relativa al tema, con todas las suposiciones y variantes necesarias que pueden plantearse, o, simplemente dirigir directamente las cuestiones al fabricante. El tamaño de una hélice no pude calcularse solamente de forma teórica, sino que también debe adaptarse al buque. El buque debe disponer del espacio suficiente para la hélice, incluyendo un huelgo suficiente entre la hélice y el casco. Debido a los efectos hidrodinámicos y o a cavitación el casco del buque y el timón pueden ser excitados 139 mecánicamente, lo que puede causar fuertes vibraciones en la popa y en el timón, con la posibilidad de fallos mecánicos. 3.5. Cavitación y perturbación del empuje La mayoría de los buques de aproximadamente 100 toneladas de desplazamiento o mayores, pueden controlar, pero no eliminar los efectos de la cavitación. Esto significa que se reduce el efecto erosivo sobre el material y se mejoran las características hidrodinámicas así como su comportamiento como fuente de excitación de vibraciones. Pero, también debe recordarse, que existen muy pocas hélices que estén libres de cavitación. La mayoría experimentan cavitación en alguna posición del disco de la hélice. La densidad de potencia de una hélice puede ser aumentada sólo hasta cierto límite, que depende de los parámetros de la hélice y especialmente de la relación de área de la pala. Obviamente, la cavitación tiene lugar primero en la sección extrema de la pala, extendiéndose hacia el núcleo con mayor consumo de potencia. Es una cuestión de definición cuando estos efectos llegan a ser llamados “perturbación del empuje”, por ejemplo, si la cavitación es alta por debajo del 0,5 del radio. Consecuentemente el rendimiento de la hélice disminuye rápidamente. 3.6. Hélices para buques de alta velocidad Para buques de alta velocidad, en los que las velocidades de giro y de avance son altas y la inmersión de la hélice es baja, se puede alcanzar un punto donde no sea factible controlar apropiadamente los efectos de la cavitación. Para solventar este problema se permite que las secciones de la pala caviten plenamente, de forma que la cavidad desarrollada en la parte posterior de la pala se extienda más allá del borde de trabajo y colapsa dentro de la estela de la pala. Tales hélices son llamadas supercavitantes y se utilizan normalmente en aplicaciones tales como buques militares de alta velocidad y embarcaciones de recreo. Para pequeños buques de alta velocidad el concepto de hélice de superficie ha tenido éxito. Estas hélices trabajan parcialmente dentro y parcialmente fuera del agua. El calado de la hélice medido desde la superficie libre del agua hasta la línea de centro de la misma hélice, puede ser reducido a cero, o es controlable. En la condición de inmersión parcial, las palas de la hélice están, normalmente, proyectadas para trabajar 140 de tal forma que la superficie de presión de la pala permanezca plenamente mojada y la cara de succión esté seca. 3.7. Sentido de giro de la hélice El sentido de giro puede tener consecuencias respecto a la maniobrabilidad y el rendimiento. Pese a que las explicaciones dadas en numerosa literatura al respecto no son plenamente convincentes, se pueden dar las siguientes recomendaciones: Un solo eje: (Mirando desde la popa de la hélice hacia proa) 141 Dos ejes: (Mirando desde la popa de la hélice hacia proa) Para conocer algo más sobre las razones para las disposiciones anteriores, a continuación algunas explicaciones tomadas de literatura especializada. Rendimiento de la hélice Se ha detectado y comprobado que el giro presente en el campo de la estela, debido al flujo alrededor del buque, en el disco de la hélice puede conducir a un incremento en el rendimiento de la hélice cuando el sentido de giro de la misma es opuesto al sentido de giro del campo de la estela. Maniobrabilidad (una sola hélice) Para buques con una sola hélice, la influencia sobre la maniobrabilidad está determinada completamente por el “efecto rueda de paletas”. Cuando el buque está 142 parado y la hélice comienza a moverse, la hélice moverá la parte posterior del buque en el sentido de giro. De esta forma, con una hélice de paso fijo, la dirección inicial del movimiento cambiará con el sentido de giro; por ejemplo, con empuje avante o atrás. En el caso de hélice de palas orientables, el movimiento tenderá a ser unidireccional porque solamente cambia el paso (se mueve la pala) desde la posición de avante a ciar. El sentido de giro de la hélice no cambia nunca. En la posición de empuje ciando, las hélices FPP y CPP tienen el mismo sentido de giro y suponiendo que estribor es el lado principal para atraque, existe clara ventaja para desatracar con empuje hacia atrás (ciando) Maniobrabilidad (con dos hélices) Además del efecto rueda de paletas, otras fuerzas debidas al efecto de la presión diferencial sobre el casco, y a la excentricidad del eje ejercen su influencia. La presión diferencial, debido al empuje inverso de la hélice de la otra banda da como consecuencia un empuje lateral y un par de giro. Desde el punto de vista de la maniobrabilidad puede deducirse de las pruebas efectuadas que las hélices de paso fijo se comportan mejor cuando giran hacia fuera. Para las hélices de palas orientables, no existe una conclusión tan clara. Pese a que estos efectos son de pequeña magnitud, el proyecto debería seguir las recomendaciones dadas, pero sí no se observan las mismas, no existen grandes desventajas. 3.8. Selección del número de palas de la hélice El número de palas varía, normalmente, de tres a siete. Para los buques mercantes, se utilizan cuatro, cinco, o seis palas, pese a que muchos remolcadores y buques pesqueros utilizan normalmente hélices con tres palas. En aplicaciones navales militares, donde el ruido generado es un factor muy importante, predominan hélices con un número de palas, que como mínimo es cinco. El número de palas estará determinado, en primer lugar, por la necesidad de evitar frecuencias de resonancia perjudiciales para la estructura del buque, así como frecuencias de vibración torsional de la maquinaría. Dado que el número de palas 143 aumenta los problemas de cavitación en la pala, puede aumentarse la raíz de la misma, con lo que el huelgo de pala llega a ser menor. También se ha demostrado que el rendimiento de la hélice y el diámetro óptimo aumentan a medida que disminuye el número de palas, y en alguna medida, la velocidad de la hélice (n) dependerá del número de palas. 3.9. Tiro Para un remolcador el objetivo del proyecto es el tiro requerido (o empuje; la hélice no parece que sea una fuente de resistencia). Eso implica que para la selección del motor diesel, el parámetro más importante es el empuje o tiro, y no la potencia efectiva y la velocidad del buque (v). El punto de diseño en el diagrama de funcionamiento del motor diesel debe ser elegido en relación con este parámetro. Para el tiro o empuje, existen, generalmente, varias definiciones. - Máximo tiro que es el promedio máximo de la tensión medida en el cabo de remolque durante un periodo de un minuto en la situación de prueba correspondiente. El máximo tiro generalmente corresponde a la potencia máxima del motor diesel. - Tiro sostenido que es la tensión continuamente mantenida en el cabo de remolque que se puede lograr durante un periodo de 5 minutos en la situación de pruebas conveniente. - Tiro efectivo que es el tiro que un buque puede lograr en aguas abiertas pero que no es comprobable en una situación del ensayo normal. Generalmente se caracteriza como un cierto porcentaje del tiro sostenido (por ejemplo 75–80%). Después de haber seleccionado la hélice (Diámetro (D), P/D, relación de área de la pala, etc.) para el tiro también puede estimarse que se comporta como una curva cúbica en base a los parámetros de la hélice (Figura 3.9.1.). Esta curva también puede interpretarse como el resultado de la curva límite de potencia efectiva, que no puede ser desplazada hacia la izquierda porque la velocidad del buque ya está cercana a cero. Las pruebas de tiro deben efectuarse en una zona que tenga la profundidad suficiente y aguas no estancadas. Los efectos de recirculación en la hélice requieren 144 una extensión suficiente de agua porque en la condición de tiro la velocidad del avance del agua entrante sería cero. La recirculación del agua causa pérdidas o reducciones en el empuje de la hélice. Para condición de tiro se debe elegir un punto de diseño o proyecto a la potencia nominal (100% PB) del motor diesel y a la velocidad nominal del motor (n) en la zona media del rango de potencias máximas, por ejemplo, debería elegirse el Punto 1 en la Figura 3.9.1. Es preciso reservar un margen de velocidad del motor (n) a la izquierda para posibles tolerancias de proyecto. El margen de velocidad de reserva a la derecha permite una velocidad superior del buque. Fig. 3.9.1. Tiro 3.10. Paso de la hélice 3.10.1. Hélice de paso fijo (FPP) El proyecto de un sistema propulsivo con una hélice de paso fijo es absolutamente crítico para las características del buque. La potencia al freno (PB) curva (B) debería pasar a través de la potencia nominal a la velocidad nominal del motor diesel. Pero debido a las tolerancias geométricas y a 145 los deterioros hidrodinámicos, la curva de la hélice (C) puede tener más altura que la estimada inicialmente en las predicciones. Esta situación es factible de superar proyectando la curva de la hélice (A) a una velocidad ligeramente superior para el buque. En función del tipo de motor diesel se pueden realizar dos aproximaciones diferentes. Fig. 3.10.1.1. Elección del punto de proyecto para una hélice de paso fijo. Procedimiento estándar (Utilizable con cualquier tipo de motor) Punto 1: Punto de proyecto o diseño de la hélice preferido / recomendado En el punto de proyecto o diseño la hélice funciona a la velocidad nominal (100% n) y una pequeña cantidad (margen de proyecto o de diseño) por debajo de la potencia nominal (100% de PB). En este caso el motor diesel está efectivamente trabajando en condición de “desratización” (Punto 1, curva de potencia efectiva para condiciones de pruebas = Curva de la hélice A). Con mala mar (desplazamiento ambiental) o con el paso del tiempo la curva de la hélice se moverá hacia la izquierda, con lo que llegará a estar disponible la potencia nominal (Punto 2, curva de la hélice B). 146 El proyecto permite que la hélice funcione al 100% de rpm (velocidad nominal) en tanto que la curva de la hélice no pase del Punto 2. La velocidad del buque (v) aumentará con el desplazamiento de la curva de la hélice, y alcanzará su máximo en el punto 2. Utilizando este procedimiento, el proyectista debe considerar que puede no ser posible demostrar la capacidad del buque para alcanzar la velocidad máxima (v) en las condiciones de pruebas, dado que la velocidad del motor diesel (n) está limitada a la velocidad nominal (100%n). La diferencia entre la potencia nominal y la potencia de proyecto se llama “margen marino” = margen de proyecto. Sí no existen requisitos específicos, debe usarse un margen de proyecto de aprox. 6 – 10%. La potencia nominal debe coincidir con la curva de la hélice A a una velocidad (n) del 101 – 103,5% de n, pero estos son valores puramente teóricos. 3.10.2. Hélice de palas orientables (CPP) La hélice de palas orientables puede considerarse como una extensión de las hélices de paso fijo. Cada paso dará lugar a una nueva curva de la hélice. Se muestra un ejemplo típico en la Figura 3.10.2.1., donde la característica de la hélice de palas orientables está superpuesta sobre el diagrama característico de un motor diesel. Fig. 3.10.2.1. Características de una hélice CPP sobre un diagrama típico de características de un motor diesel 147 Cada cambio en el paso de la hélice cambia la relación entre la velocidad de proyecto (n) y la potencia al freno (PB) para un buque determinado. Debido al posible ajuste posterior del paso de la hélice, no existen restricciones para el punto de diseño o proyecto dentro del diagrama de funcionamiento del motor diesel. Debe elegirse un punto al 100% de la potencia el freno (PB) y a la velocidad (n), Figura 3.10.2.2. No se fija a priori el margen de variación del paso disponible. Es una parte de la especificación del cliente para la hélice. Por parte del fabricante de la misma, este margen está limitado por el tamaño del núcleo de la hélice y la magnitud de las fuerzas máximas sobre la pala. Normalmente, el margen de paso disponible o utilizable estará referido al paso de proyecto o diseño, y se da en grados. El margen por encima del paso de proyecto o diseño es muy pequeño porque, en general, no es necesario, excepto para aplicaciones muy especiales. Fig. 3.10.2.2. Punto de diseño o proyecto de una hélice de palas orientables (CPP) La característica de una hélice de palas orientables (CPP) en el punto de proyecto puede calcularse como una hélice de paso fijo (FPP). Debe evitarse la necesidad de usar las características de una hélice de paso fijo (FPP) sobrepasando en 148 5º el paso de proyecto, porque el efecto de la distorsión de la sección afecta de forma considerable a los cálculos. La hélice de palas orientables permite varias operaciones: - Sí la curva de potencia entregada en el punto de diseño o proyecto (paso de proyecto) no pasa a través de la zona de mínimos consumos de combustible, es factible ajustar el paso en condiciones de carga parcial. - Sí la curva de potencia llega a estar demasiado cercana al límite operativo MCR del motor diesel, la curva de funcionamiento puede moverse fuera de esta zona. - Sí el buque, durante las pruebas de mar, no es capaz de conseguir la potencia al freno de proyecto (PB), puede corregirse el paso de proyecto o cuando aumenta la resistencia del buque con la vida operativa, la potencia al freno de proyecto (PB) y la velocidad (n) permanecerán inalterables. - Puede elegirse una hélice de palas orientables (CPP) con una posición de plena reversibilidad y el buque puede moverse ciando sin necesidad de reductor inversor. La distancia de frenado del buque es significativamente menor que con una hélice de paso fijo (FPP). De forma general, las características de maniobrabilidad son mejores. - Puede elegirse una hélice de palas orientables (CPP) con una posición de las palas “en bandera” (mínima resistencia), sí el modo de funcionamiento con un solo eje forma parte del perfil operativo del buque. - En cierto margen, el motor diesel puede funcionar a velocidad constante. En este modo, el motor puede accionar, además de la hélice, un alternador o una bomba contraincendios. Pero, como contrapartida de las ventajas: - La hélice de palas orientables (CPP) es más cara que una hélice de paso fijo (FPP). - Sí la hélice se ajusta fuera del paso de proyecto, el rendimiento disminuye. - Es necesario espacio adicional en el interior del buque para ubicar la unidad de control de la hélice. 149 - Debido a su mecanismo interno, la hélice de palas orientables (CPP) tiene un núcleo de mayor tamaño (Del orden de un 50% en comparación con la de paso fijo) que una hélice de paso fijo (FPP), lo que puede conducir a un mayor diámetro. - Sí una hélice es totalmente reversible, debe tenerse cuidado de que las palas no interfieran entre sí cuando pasen por paso cero. El área de la parte superior de la pala estará limitada. 150 ANEXO 4: WATERJET 4.1. Geometría y punto de proyecto La principal aplicación de un Waterjet se encuentra en el sector de la alta velocidad; es decir por encima de los 20 nudos. El rendimiento propulsivo de Waterjet un disminuye considerablemente con reducción de la velocidad (v). Para velocidades inferiores a los 20 a 24 nudos, es preferible una hélice. Un Waterjet se parece a una hélice como elemento hidrodinámico propulsor, pero está instalado en el interior del buque, y se comporta más como una bomba que como una hélice. Fig. 4.1.1. Waterjet Las principales diferencias entre una hélice y un Waterjet son: - La hélice es muy sensible a la velocidad y dirección del flujo de agua que le llega. Percibe el buque en su situación hidrodinámica (estado de la mar, viento, calado, etc.), así como al motor diesel. 151 - El Waterjet funciona como una bomba en tanto que existe agua en el colector de admisión y transforma la potencia efectiva al freno (PB) en empuje. Hay una mínima sensibilidad al buque. Por esta razón cuando el motor diesel se conecta a un Waterjet tiene menores ciclos de carga. Fig. 4.1.2. Punto de proyecto del Waterjet Debido a la insensibilidad a la resistencia del buque (curva de potencia efectiva) no existen restricciones para elegir un punto de proyecto en el interior del diagrama de funcionamiento del motor diesel. Pero el Waterjet, desde el punto de vista mecánico, se parece a una hélice, y deben tenerse en cuenta las tolerancias de fabricación. Esta relación puede conducir al hecho de que al 100% de la velocidad (n) del eje, el Waterjet puede no absorber la potencia al freno del motor diesel (PB). Por lo tanto debe elegirse un punto de proyecto a la potencia nominal y a una velocidad inferior en, aproximadamente, un 1-2% a la de funcionamiento del motor (n) (margen de proyecto) 152 (En la Figura 4.1.2., Punto de proyecto 1). Sí la curva de la potencia efectiva se mueve hacia la izquierda, la velocidad del buque (v) disminuirá, pero los cambios no pueden apreciarse en la Figura 4.1.2., porque el todavía está funcionando con su velocidad requerida (n) y la potencia al freno (PB) necesaria. El comportamiento del buque no puede apreciarse en la Figura 4.1.2. Esta es la razón por la que el diagrama tiene un uso limitado para elegir un punto de proyecto del Waterjet. Sólo da una idea acerca de la relación entre la curva de la hélice, las líneas de consumo de combustible constante, el margen de proyecto y el margen a la curva límite MCR del motor diesel. Estas relaciones permanecerán independientes de la carga del buque, como antes. Tomando en consideración estas consideraciones, puede elegirse el Punto 2 de proyecto (Figura 4.1.2.). El punto de proyecto de la velocidad del eje (n) más a la izquierda deberá ser 1,5% superior al punto de adaptación. La ventaja radica en un menor consumo de combustible, pero a costa de disminuir el margen a la curva MCR (reserva para aceleración). Dado que este comportamiento es muy importante, se da a continuación un ejemplo. Imaginemos un carro, sobre cuya plataforma se instala un tanque de agua y una bomba. El agua será expelida horizontalmente en la dirección opuesta al movimiento. El carro comenzará a moverse sobre el suelo, y, con independencia de cuan rápido se mueva, la bomba siempre expelerá la misma cantidad de agua, utilizando la misma potencia. Esto también es cierto, incluso en el caso de que un obstáculo frene la plataforma. La bomba no se verá afectada por el comportamiento del carro. En otras palabras, el empuje generado depende únicamente de la cantidad de agua expelida. Pese a todo, esta simplificación, muestra la diferencia fundamental entre una hélice y un Waterjet. Pero demos un paso más adelante. Incluso si existen dos bombas separadas en el área de carga, no existe interferencia de una con la otra, con independencia de sí tienen o no el mismo tamaño o de si las bombas están expeliendo diferentes cantidades de agua. Por estas razones, debe utilizarse otro diagrama que muestra más en detalle el comportamiento del (Figura 4.1.3.). 153 Fig. 4.1.3. Diagrama de funcionamiento de un Waterjet La figura muestra la curva de proyecto de la hélice junto con el diagrama de funcionamiento del Waterjet, y en lugar de potencia efectiva, se utiliza el empuje. Dado que la velocidad del buque (v) y la velocidad del motor diesel (n) no están relacionadas entre sí, el diagrama de funcionamiento del motor diesel no se representa en la figura. Una pequeña explicación sobre la línea de comienzo de la cavitación: estas líneas son específicas para elegir el Waterjet y no deben compararse entre sí las correspondientes a varios fabricantes. Por ejemplo, Kamewa divide sus diagramas por dos líneas en tres zonas, mostrando diferentes etapas de cavitación. Generalmente, estas líneas no deben tomarse como límites absolutos, sino como bases de guía para proyectos. Sí la curva de la hélice se desplaza hacia la izquierda la velocidad del buque (v) disminuirá y la distancia al límite de inicio de la cavitación se reducirá. La razón para este comportamiento es que la presión de estanqueidad en el colector de admisión baja y el Waterjet comienza a aspirar el agua a través del colector. El empuje de un es el producto del caudal de agua y de la velocidad del agua expelida. Esto significa que se puede generar un determinado empuje con un Waterjet 154 menor o mayor. En el pequeño, la velocidad del agua será mayor, y por ejemplo, la distancia entre el punto de proyecto y la línea límite de cavitación también será menor. Sí existen limitaciones de espacio para la instalación, o el tiempo de funcionamiento de un Waterjet va a ser corto, el proyectista, probablemente, elegirá un más pequeño con una distancia menor al área de cavitación. El riesgo de aspirar aire en el colector de admisión del depende de la disposición específica en el buque y del estado de la mar. En tal caso, el sistema de control debe proteger el motor diesel de cualquier riesgo de sobrevelocidad, dado que debido a la baja masa inercia del eje la condición es más exigente que para una hélice. 4.2. Funcionamiento en paralelo Pese a que se han comentado algunos aspectos en el Capítulo 3.5.1., son precisas algunas explicaciones adicionales sobre el “funcionamiento en paralelo”, referido a los Waterjet. Se pueden distinguir dos clases diferentes de disposición: 1. El buque está equipado con dos Waterjet. Cada es independiente, y accionado por un motor diesel. 2. El buque está equipado con un Waterjet. El está accionado por dos motores diesel, que están conectados por medio de una reductora. La pregunta que se plantea es ¿Qué sucede si uno de los motores se detiene? Caso 1: Tal y comos e ha comentado en el Capítulo 4.1., ambos trabajan de forma independiente y no se experimenta cambio alguno en la potencia efectiva. El Waterjet que permanece en funcionamiento continuaría funcionando como antes de la avería. Solamente disminuiría la velocidad del buque. Este caso puede ser considerado como “un problema externo al Waterjet, que no interfiere con su comportamiento operativo” Caso 2: La curva de la hélice del Waterjet no cambia, pero el diagrama de funcionamiento de los motores diesel se divide por la mitad (Figura 4.2.1.). Con ambos motores diesel en funcionamiento, en paralelo, el Waterjet experimenta los diagramas de funcionamiento combinados de ambos motores. (MCR Curva 1); con un motor diesel 155 sólo se transmitiría la mitad (MCR Curva 2). Sí debe utilizarse la potencia total al freno de un solo motor, será necesaria una reductora de dos etapas. Fig. 4.2.1. Funcionamiento de un Waterjet con dos motores diesel 4.3. Estimación del tamaño y de la velocidad del eje La velocidad de proyecto (n) del eje de un depende del tipo, tamaño y aplicación y debe ser realizado por el suministrador del Waterjet. Sí son conocidas la potencia al freno instalada (PB) y la velocidad del buque (v), pueden usarse las Figuras 4.2.2., y 4.2.3. para una estimación preliminar rápida. 156 Fig. 4.2.2. Estimación del tamaño de un Waterjet (diámetro colector admisión) Fig. 4.2.3. Estimación de la velocidad del impulsor de un Waterjet 157 ANEXO 5: FICHAS DE INSPECCIÓN PROCEDIMIENTO DE ALINEAMIENTO 5.1. Ficha de inspección 1 FICHA DE INSPECCION 1.- Calibración de Soportes Amortiguadores Dobles. Cliente : Informe Nº: OT : Fecha: Descripción: Controló: Equipo: Revisó: Nº serie: MOTOR: POSICION POSTE 1 a b POSTE 2 c d a A A B B C C X X Y Y b Observación: Datos en milímetros. NOMBRE CARGO FIRMA c d 158 5.2. Ficha de inspección 2 FICHA DE INSPECCION 2.- Calibración de Soportes Amortiguadores Simples Cliente : Informe Nº: OT : Fecha: Descripción: Controló: Equipo: Revisó: Nº serie: MOTOR: POSICION POSTE 1 a b c d A B H1 H2 NOMBRE CARGO FIRMA 159 5.3. Ficha de inspección 3 FICHA DE INSPECCION 3.- Alineamiento entre Conjunto Motor-Caja. Cliente : Informe Nº: OT : Fecha: Descripción: Controló: Equipo: Revisó: Nº serie: (Medidas en mm) NOMBRE CARGO FIRMA 160 5.4. Informe técnico de vibraciones INFORME TECNICO DE VIBRACIONES FECHA BOSQUEJO MAQUINARIA BUQUE / UNIDAD EQUIPO / SISTEMA VELOCIDAD CLASIF. DE LA MQ. INSTRUMENTO TIPO DE MONTAJE RANGO UNIDAD DE MEDIDA OPERADOR A.- OBSERVACIONES: C.- DIAGNOSTICO: D.- RECOMENDACIONES: NOTA: Se requiere que los informes técnicos de vibraciones sean entendibles por cualquier persona, pudiendo tener otro formato.