AVID Pneumatic Controls, Model EaziCal
Anuncio

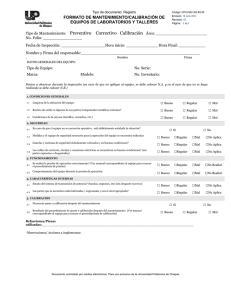
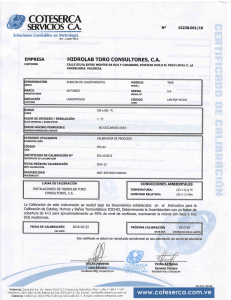
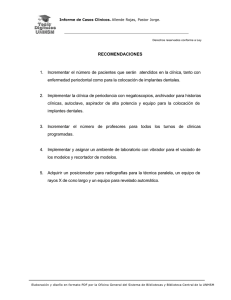
Posicionador AVID EaziCal IR Instrucciones de instalación y operación Instrucciones de instalación y operación para el posicionador AVID EaziCal IR con calibración mediante pulsador AutoCal o con señal remota infrarroja AVID Posicionador EaziCal IR Montaje ModMount® * Inserción en la transmisión Actuador Nota Estos dispositivos precisan de un suministro de aire instrumental exento de aceite, seco y limpio, a través de un regulador de filtrado de aire con un tamaño de malla de 5 micrones. * La inserción para la transmisión tiene que proporcionarse con actuadores Keystone para instalaciones ModMount. Instrucciones de montaje Nota Todos los productos AVID® van equipados de fábrica con el montaje directo Pentair. Para montaje estándar Namur véase Apéndice “A”. Cerciórese de que el actuador Pentair/Keystone va provisto de la transmisión estándar 16 dia x 11 af. Figura 1 1. Lleve el actuador a la posición totalmente cerrada. 2. Monte el posicionador EaziCal IR en el actuador usando (4) tornillos de cabeza hueca M5 x 12 mm y (4) arandelas M5 uniendo su eje de salida en la entrada del actuador (fig.1). 3. Afloje los (4) tornillos prisioneros que fijan la cubierta del indicador de posición EaziCal. Gire la cubierta aproximadamente 45° y levántela (fig.2). (Diagrama de cableado en el interior de la cubierta del indicador de posición EaziCal). 4. Cerciórese de que está instalado el collarín correcto para la capacidad apropiada. Gire la cubierta 45° y luego tire verticalmente hacia arriba Figura 2 Conexión neumática Manómetro de la Conexión de Salida 1 Actuador de simple efecto (con retorno por muelle) En el caso de los actuadores de simple efecto se debe obturar la Conexión de Salida 2. La Conexión de Salida 1 debe conectarse mediante un tubo a la conexión de entrada del actuador que actúa contra el muelle. (El aumento de la señal hace que la presión aumente en la Conexión de Salida 1 del posicionador). Manómetro de alimentación Actuador de doble efecto (doble retorno): En el caso de los actuadores de doble acción la Conexión de Salida 2 está conectada de manera que lleve el actuador hacia la posición en fallo. La Conexión de Salida 1 está conectada para apartar el actuador de la posición en fallo. (El aumento de señal hace que aumente la presión en la Conexión de Salida 1 del posicionador y que la presión disminuya el la Conexión de Salida 2 del posicionador). Alimentación (Conexión de Entrada) Conexión de Salida 1 Conexión de Salida 2 Identificación de rosca * Figura 3 www.pentair.com/valves *Nota: El aire de alimentación del posicionador ha de ser aire de instrumentos limpio, seco, exento de aceite (5 micrones) s/ ISA-S7.3 & ISO 8573-1. La máxima presión de alimentación es 8,3 bar. Todas las conexiones neumáticas son de 1/4” NPT ó G1/4 ISO 228. Véase manifold para identificación del tipo de rosca. Nota * Identificación de rosca “B” = G1/4 ISO 228 Sin marca = 1/4” NPT Pentair se reserva el derecho a cambiar el contenido sin previo aviso AVDSB-0030-ES-1409 Posicionador AVID EaziCal IR Instrucciones de instalación y operación Conexión eléctrica Entrada (-) 4-20 mA La conexión eléctrica (bucle de entrada de 4-20 mA) del posicionador EaziCal es crítica respecto a la polaridad. Conecte el bucle de entrada de 4-20 mA a la regleta de bornes J1 en la placa de conectores como se ilustra a continuación (el cable positivo al terminal 3 y el cable negativo al terminal 2). El cable puede estar entre los tamaños 20 a 14 AWG. J1 es extraíble (se enchufa en un conector de patillas soldado a la tarjeta electrónica) para un conexionado y servicio más cómodos.Entrada (+) 4-20 mA Entrada de cables Interruptores Dip Interruptor Dip #1 Posición “OFF” (Ajuste de fábrica): Acción normal (4 mA representa la posición cero/en fallo, y 20 mA representa el valor máximo). Posición “ON”: Acción inversa (20 mA representa la posición cero/en fallo y 4 mA representa el valor máximo). Interruptor Dip #2 Posición “OFF”: Activa el requisito de código de seguridad para operación remota por infrarrojos. Posición “ON” (Ajuste de fábrica): Desactiva el requisito de código de seguridad (se puede emplear el remoto por infrarrojos sin código de seguridad). Interruptor Dip #1 Interruptor Dip # 2 Interruptores Dip tal como salen ajustados de fábrica Reductor del detector de posición Ángulo inicial del indicador de posición (modo ajuste) El indicador de posición Eazical, que mide la posición absoluta de la válvula, tiene un ángulo limitado de operación para una medición apropiada de la posición. El Detector de Posición tiene que permanecer dentro del ángulo de operación en las posiciones abierta y en fallo de la válvula. Esto se consigue ajustando inicialmente el ángulo del detector de posición mientras la válvula se encuentra en la posición en fallo. El Eazical tiene un modo de operación para conseguir el ajuste de este ángulo inicial llevando a cabo las siguientes acciones. 1. Aplique la corriente del bucle al posicionador y ajústela a 12 mA. 2.Pulse y mantenga apretados los botones alto y bajo hasta que los LEDs amarillo y verde comiencen a destellar. Suelte ambos botones para eliminar la presión de aire de la Conexión de Salida 1. 3.Si la válvula falla en sentido horario y lleva a cabo la carrera en sentido antihorario, lleve el conmutador SW1 a la posición CCW (sentido antihorario). Si la válvula falla en sentido antihorario y lleva a cabo la carrera en sentido horario, lleve el conmutador SW1 a la posición CW (sentido horario). Vea la figura a la derecha. 4.Sin botones apretados y con el actuador en la posición en fallo, empuje el reductor principal del eje (el mayor de los dos) hacia abajo hasta que se separe de su posición de bloqueo del eje. 5.Haga girar el reductor principal del eje (girarán ambos reductores), hasta que sólo esté destellando el LED verde. Nota: Si el LED ya está verde, pase por alto el punto 5 y pase al 6. 6.Tire hacia arriba el reductor principal del eje permitiendo que vuelva a engranar con el eje, y bloquéelo en posición. 7 Pulse y mantenga el botón de Calibración Alta (High Cal) hasta que la válvula haga toda la carrera fuera de la posición en fallo mientras vigila los LEDs. No se deben iluminar los LEDs rojo ni amarillo mientras mantenga apretado el botón de Calibración Alta (High Cal). Si el LED rojo o el amarillo se iluminan mientras mantiene apretado el botón de Calibración Alta (High Cal), ello significa que las líneas de aire de la orientación del detector y de posición y del actuador están fuera de fase. Corrija el error de fase cambiando la posición de SW1 y repita este procedimiento comenzando desde el punto 2. 8.Libere el botón de Calibración Alta (High Cal) y vigile el LED rojo. El LED rojo destellará hasta que la válvula llegue a la posición en fallo. 9.Pulse el botón de Calibración Baja (Low Cal) para salir del Modo de Ajuste del detector de posición (si no se aprietan botones, se saldrá automáticamente de este modo en aprox. 2 minutos). Pentair se reserva el derecho a cambiar el contenido sin previo aviso Figura 4 página 2 Conmutador (SW1) Reductor principal del eje FAULT CAL/ SLEW NORMAL LOW CAL FCTN HIGH CAL Figura 5 Posicionador AVID EaziCal IR Instrucciones de instalación y operación Nota especial sobre caudal El diseño del EaziCal para caudal estándar es apropiado para volúmenes desplazados del actuador desde un mínimo de 60 pulg3 (0,98 litros) hasta un máximo de 225 pulg3 (3,7 litros) para una funcionalidad apropiada de autocalibración. También se debería observar que esto debe emplearse solo como un criterio general. La dinámica del conjunto actuador/ válvula dictará el éxito de la rutina de la autocalibración y podría quedar comprometida por los siguientes factores: capacidad volumétrica de la alimentación de aire del instrumento, dimensión del actuador, tamaño de los conductos y estado del conjunto actuador/válvula. El diseño opcional del EaziCal para caudal elevado es apropiado para volúmenes desplazados del actuador desde un mínimo de 200 pulg3 (3.3 litros) hasta un máximo de 600 pulg3 (9.8 litros) para una funcionalidad apropiada de autocalibración. También se debería observar que esto debe emplearse solo como un criterio general. La dinámica del conjunto actuador/válvula dictará el éxito de la rutina de la autocalibración y podría quedar comprometida por los siguientes factores: capacidad volumétrica de la alimentación de aire del instrumento, dimensión del actuador, tamaño de los conductos y estado del conjunto actuador/válvula. Calibración completa: **Para gama distribuida introduzca los valores de entrada deseados durante la calibración baja y alta. Calibración del posicionador EaziCal Una vez el Eazical y el actuador están conectados y se ha ajustado el ángulo inicial se pueden llevar a cabo la calibración baja y alta en el EaziCal. Calibración baja se refiere al valor de la corriente de entrada que lleva la válvula a la posición en fallo. Calibración alta se refiere al valor de la corriente de entrada que lleva la válvula a la posición máxima de la gama. La calibración ajusta los parámetros internos de EaziCal específicos del actuador, y los valores de corriente de entrada. Los parámetros ajustados son la ganancia del bucle interno de EaziCal, la posición final (cero/ valor máximo) de la carrera de la válvula, y el umbral (el nivel de corriente de entrada en el que el transductor es forzado a la posición extrema, para asegurar que la válvula queda totalmente abierta o cerrada). La rutina de calibración usa el valor de la corriente de entrada para establecer su ajuste interno, de modo que es importante que la corriente de entrada no sufra cambios durante la rutina de calibración. Para efectuar una calibración baja: (Posición Cero) 1. Establezca el nivel de corriente de entrada en el valor que lleve la válvula a la posición totalmente cerrada (generalmente 4 mA). 2.Inicie la rutina de calibración baja pulsando y manteniendo apretado el botón LOW CAL (calibración baja) en el EaziCal hasta que el LED amarillo comience a destellar, o apretando el botón LOW en el IR Remoto (puede que precise de la introducción de un código de seguridad). 3.Observe el LED amarillo destellante en el EaziCal que denota las varias etapas de la rutina de calibración: a. Un destello indica la rutina de Ganancia Gruesa. b. Dos destellos indican la rutina de Ganancia Fina. c. Tres destellos indican la rutina de ajuste de la posición Cero. d. Cuatro destellos indican la rutina de umbral inferior. 4.Cuando el LED verde comienza a destellar, queda terminada la calibración. Si el LED rojo destella, es indicación de que no se ha podido completar una de las rutinas de calibración. El número de destellos del LED rojo indica qué rutina de calibración ha fallado. Para efectuar una calibración alta: (Posición máxima de la gama) 1. Establezca el nivel de corriente de entrada en el valor que lleve la válvula a la posición totalmente abierta (generalmente 20 mA). 2.Inicie la rutina de calibración alta pulsando y manteniendo apretado el botón HIGH CAL (calibración alta) en el EaziCal hasta que el LED amarillo comience a destellar, o apretando el botón HIGH en el IR Remoto (puede que precise de la introducción de un código de seguridad). 3.Observe el LED amarillo destellante en el EaziCal que denota las varias etapas de la rutina de calibración: a. Un destello indica la rutina de Ganancia Gruesa. b. Dos destellos indican la rutina de Ganancia Fina. c. Tres destellos indican la rutina de ajuste de la posición de valor máximo de la gama. d. Cuatro destellos indican la rutina de disparo alto. 4.Cuando el LED verde comienza a destellar, queda terminada la calibración. Si el LED rojo destella, es indicación de que no se ha podido completar una de las rutinas de calibración. El número de destellos del LED rojo indica qué rutina de calibración ha fallado. Funciones avanzadas El Eazical tiene la capacidad de admitir cambios de los ajustes de calibración (Ganancia, Cero, Valor máximo de la gama y Umbral) de forma manual. Esta función tenía el propósito de hacer cambios menores en los valores de calibración después de llevar a cabo la calibración Baja y Alta. Algunos ejemplos de donde podría emplearse esta capacidad son disminuir la Ganancia si la válvula sigue mostrando algún sobrepasaje o cambios rápidos de posición, o un aumento del umbral superior de modo que no sea efectivo a 20 mA. Se debe tener precaución si se emplea la calibración manual, el mal ajuste de estos parámetros en el posicionador Eazical puede tener como resultado un comportamiento errático o un fallo en la operación, y puede precisar del reajuste de la EEPROM antes de poder volverse a efectuar una autocalibración. Para llevar a cabo un ajuste manual de la calibración 1. Aplique corriente de entrada al Eazical (generalmente 12 mA). 2.Inicie la rutina de la calibración manual pulsando y manteniendo apretado el botón de función (central) en el Eazical hasta que los LEDs verde y amarillo destellen juntos. 3.Observe los LEDs verde y amarillo destellando en el Eazical. El número de destellos denota las diversas etapas de la rutina de calibración manual. Apretando el botón de Función (central) se avanza a la siguiente etapa: a. Dos destellos indican el modo de ajuste manual de ganancia. b. Tres destellos indican el modo de ajuste de la posición de cero. c. Cuatro destellos indican el modo de ajuste de umbral inferior. d. Cinco destellos indican el modo de ajuste de valor máximo de la gama. e. Seis destellos indican el modo de ajuste del umbral superior. Pentair se reserva el derecho a cambiar el contenido sin previo aviso página 3 Posicionador AVID EaziCal IR Instrucciones de instalación y operación 4. Para alterar cualquier característica del posicionador, siga los siguientes pasos: a. Ganancia manual Aumente la ganancia del posicionador pulsando el botón High Cal (Calibración alta). Disminuya la ganancia del posicionador pulsando el botón Low Cal (Calibración baja). Siga aumentando o disminuyendo la ganancia pusando repetidas veces los botones respectivos. Se ha conseguido el ajuste máximo cuando se encienda el LED rojo. b. Posición cero [Para ajustar la posición cero a un punto diferente del paro físico de la válvula se tiene que haber llevado a cabo la calibración baja del posicionador a un valor ligeramente inferior al de la corriente de posición cero. (P. ej., si la corriente de la posición cero es de 4,0 mA la calibración baja como se ha descrito en la sección anterior tiene que fijarse en 3,9 mA.)] Aumente la posición cero pulsando el botón de calibración baja. Disminuya la posición cero pulsando el botón de calibración alta. Siga aumentando o disminuyendo la posición cero pulsando los botones repetidas veces. c. Umbral inferior Aumente la señal de entrada de mA para que el posicionador pierda presión de la conexión de salida 1 pulsando el botón Low Cal (calibración baja). Disminuya la entrada de mA para que el posicionador pierda presión de conexión de salida 1 pulsando el botón High cal (calibración alta). Siga aumentando o disminuyendo el umbral inferior pulsando repetidas veces los botones. d. Valor máximo [Para ajustar el valor máximo en un punto distinto del tope mecánico de la válvula la calibración alta del posicionador tiene que haberse realizado a una corriente ligeramente superior a la de la posición del valor máximo de la gama. (P. ej. Si el valor máximo actual es de 20,0 mA la calibración alta como se describe en la sección anterior tiene que efectuarse a 20,1 mA.)] Disminuya el valor máximo pulsando el botón High Cal (calibración alta). Aumente el valor máximo de la gama pulsando el botón Low Cal (calibración baja). Siga aumentando o disminuyendo el valor máximo de la gama pulsando repetidas veces los botones. e. Umbral superior Disminuya la señal de entrada de mA para que el posicionador pierda presión en la conexión de salida 2 pulsando el botón High Cal. Aumente la señal de entrada de mA para que el posicionador pierda presión de la conexión de salida 2 pulsando el botón Low Cal. Siga aumentando o disminuyendo el umbral pulsando repetidas veces los botones. 5. La corriente de entrada puede cambiarse durante el ensayo para observar los efectos del ajuste sobre la operación del EaziCal. 6. Para guardar los ajustes y salir del modo de calibración manual, se tiene que mantener apretado el botón de función (centro) durante aproximadamente 5 segundos (los LEDs verde y amarillo parpadeantes cambiarán a un parpadeo solo verde cuando se hayan guardado los ajustes). Este procedimiento para guardar y salir se puede llevar a cabo a partir de cualquier etapa de la calibración manual. 7. Pulsando el botón de función (centro) durante los ajustes del umbral superior se sale del modo de calibración manual sin guardar ningunos ajustes hechos. Indicador visual HiVue Abierto Cerrado Figura 6 Tornillo de cabeza ranurada Ajuste del indicador visual HiVue 1. Vuelva a poner la cubierta del alojamiento. Asegure que ha anotado la posición final de la válvula (totalmente abierta o totalmente cerrada). 2.Cerciórese de que el indicador visual HiVue coincide con la posición de la válvula (fig. 4). 3.Si el indicador visual HiVue no coincide con la posición de la válvula, extraiga los (4) tornillos de cabeza ranurada que fijan la cubierta del indicador visual HiVue a la cubierta del alojamiento. Haga girar la cubierta del indicador 90° de modo que se exhiba el símbolo correcto para la posición de la válvula (fig. 5). 4.Cuando haya asegurado que el indicador visual coincide con la posición de la válvula, fije la cubierta del indicador visual a la cubierta del alojamiento empleando los (4) tornillos de cabeza ranurada. Cubierta del indicador visual HiVue Indicador visual HiVue Cubierta del alojamiento Figura 7 Importante: No sobrepase 1,13 Nm de par para cada tornillo. Pentair se reserva el derecho a cambiar el contenido sin previo aviso página 4 Posicionador AVID EaziCal IR Instrucciones de instalación y operación Control remoto (IR) con el posicionador El posicionador posee la capacidad de ser operado (calibrado) por medio de un control remoto de rayos infrarrojos (IR). El posicionador puede calibrarse empleando los botones en el módulo del posicionador; sin embargo, esto demanda la extracción de la cubierta superior. Con el control remoto (IR) se puede calibrar el posicionador sin extraer la cubierta superior. Si no está disponible la corriente de entrada de 4-20 mA conectada al posicionador o si se tiene que ajustar el ángulo inicial del detector de posición, entonces es necesario extraer la cubierta superior. Aunque el posicionador está configurado para su uso con el control remoto, dicho control remoto (IR) no se entrega con el posicionador. El control remoto (IR) es una opción y debe ser adquirido por separado. Botones del control remoto de infrarrojos BOTÓN DE PROGRAMACIÓN Empleado para el ajuste inicial del mando remoto de IR BOTÓN DE LUZ TRASERA Enciende y apaga la luz trasera del mando remoto IR LED ROJO Se ilumina cuando se envía la señal IR 'D' POWER P1 P2 + HIGH - DROP-OFF LOW BOTONES DE MODO Activa uno de los 2 modos, que permanece en efecto hasta que se pulsa otro de estos botones. El Modo P2 es el que se emplea para el posicionador. BOTÓN DE CALIBRACIÓN ALTA (HIGH) Empleado para comenzar la rutina de calibración alta GAIN BOTÓN DE CALIBRACIÓN BAJA (LOW) Empleado para iniciar la rutina de calibración baja BOTONES NUMÉRICOS Empleado para seleccionar el código de tres dígitos para la dirección de seguridad del posicionador Programación del control remoto IR El control remoto IR se programa en fábrica y no debería volverse a programar, excepto si se sacan las baterías durante un tiempo excesivo (mayor a 10 minutos). Para programar el control remoto IR pulse el botón “P1” y luego pulse y mantenga apretado el botón “P” hasta que el LED rojo destelle una vez, y luego pulse “0”, “0”, “8”, “1”, después de lo que el LED rojo en el control remoto IR destella dos veces para confirmar la entrada. Pulse el botón “P2” y luego pulse y mantenga apretado el botón “P” hasta que el LED rojo destelle dos veces, y luego pulse “0”, “0”, “5”, “4”, tras lo que el LED rojo destella dos veces para confirmar la entrada. MANUAL ENTER B A C EXIT UNDO Figura 8 BOTÓN DE ENTRADA Empleado para entrar el código de 3 dígitos para la dirección de seguridad del posicionador Empleo del control remoto IR El posicionador tiene dos modos de operación cuando se emplea el mando remoto IR. En el primer modo, el posicionador actuará de inmediato sobre órdenes del mando remoto IR (se puede emplear cuando el posicionador que se calibra es el único que esté dentro del campo de acción de la señal del mando remoto IR, como un posicionador en una estancia cerrada). Este modo se activa ajustando el interruptor DIP posición 2 del posicionador (el más cercano al botón Low Cal - Calibración Baja) a la posición “ON” (alejándolo de los LEDs). En el segundo modo, el posicionador no actuará sobre órdenes del mando remoto IR hasta que se introduzca un código de seguridad de tres dígitos (se puede usar cuando haya múltiples posicionadores dentro del campo de acción de la señal remota IR). Este modo se activa ajustando el interruptor DIP 2 del posicionador (el más cercano al botón Low Cal - Calibración Baja) a la posición “OFF” (hacia los LEDs). Cuando se introduce el código correcto (tres dígitos seguidos del botón ENTER), el posicionador queda activado para actuar sobre órdenes remotas IR durante 5 minutos. El tiempo de activación de órdenes IR hace una cuenta atrás, o se ajusta a cero (el posicionador deja de actuar en base de órdenes) cuando el posicionador recibe un ENTER del mando remoto IR sin ir precedido del código correcto de seguridad de tres dígitos. Pentair se reserva el derecho a cambiar el contenido sin previo aviso página 5 Posicionador AVID EaziCal IR Instrucciones de instalación y operación Ajuste del código de seguridad del posicionador El código de seguridad se ajusta inicialmente introduciendo un código de 3 dígitos, mientras el posicionador está en el modo de ajuste de “Ángulo inicial del indicador de posición”. Para imponer un código de seguridad entre en el modo de ajuste del “Ángulo inicial del indicador de posición” pulsando y manteniendo los botones de calibración High y Low (alta y baja) en el posicionador hasta que parpadeen los LEDs amarillo y verde. Pulse los 3 dígitos para el código de seguridad en el control remoto de infrarrojos y luego pulse el botón ENTER en el control remoto de infrarrojos (si entra el código demasiado rápidamente puede impedir que el posicionador lo lea correctamente, haga una pausa de al menos medio segundo entre la pulsación de cada botón y tenga apretado cada botón al menos medio segundo en el control remoto de infrarrojos). Cuando se pulsa el botón de calibración baja en el posicionador para salir del modo de ajuste del “Ángulo inicial del indicador de posición” el código de seguridad de 3 dígitos queda almacenado en la EEPROM y permanecerá allí incluso si se corta el suministro eléctrico. Cerciórese de que el código de seguridad que asigna sea diferente para cada uno de los posicionadores de la zona. Reajuste de la EEPROM a los valores de fábrica El posicionador tiene una Memoria Programable y Eléctricamente Borrable de sólo Lectura (EEPROM) que se emplea para almacenar los valores de calibración y el código de seguridad del mando remoto IR. Estos valores permanecen en la memoria EEPROM incluso si el posicionador se queda sin energía eléctrica. Durante la operación normal del posicionador, no se tendrá que reajustar la EEPROM. La memoria puede quedar corrompida si se va la corriente mientras el posicionador está escribiendo en la EEPROM, lo que sólo sucede al final mismo del ciclo de calibración o al final del ajuste del ángulo inicial del detector de posición. Esta memoria puede volver a ajustarse a los valores de fábrica manteniendo apretado el botón High Cal cuando se enciende el posicionador. Después de reajustar la EEPROM, se tendrá que volver a calibrar el posicionador y se tendrá que volver a establecer el código de seguridad del mando remoto IR. Inversión de las posiciones de 4 mA y de 20 mA (acción inversa) Normalmente, 4 mA de corriente de entrada representa la posición cerrada de la válvula y 20 mA representa la posición abierta. El posicionador tiene la opción de cambiar esto de forma que 20 mA represente la posición cerrada de la válvula y 4 mA represente la posición abierta de la válvula. El modo normal se escoge llevando el interruptor DIP en posición 1 del posicionador (el más cercano a los LEDs) a la posición “OFF” (hacia los LEDs). El modo de acción inversa se escoge llevando el interruptor DIP en posición 1 del posicionador a la posición “ON” (lejos de los LEDs). El posicionador se debería calibrar de nuevo cada vez que se cambia la posición del interruptor. Leva superior Empuje hacia abajo gire y suelte Ajuste de los ruptores 1. Opere el actuador llevándolo a un extremo. Escoja el ruptor que quiere que señale esta posición (ruptor superior o inferior). Desacople la leva del ruptor correspondiente del portalevas empujando o tirando contra el muelle (empujar para el ruptor superior, levantar para el ruptor inferior). 2.Gire la leva hasta que el ruptor quede accionado. El accionamiento del ruptor se puede controlar usando un tester de continuidad o un medio semejante. 3.Suelte la leva dejando que vuelta a acoplarse con el portalevas. 4.Opere el actuador llevándolo al extremo opuesto y repita los pasos 1 a 3 para el otro ruptor. Figura 9 Esquema de conexiones RUPTOR NC #1 SUPERIOR NO Leva inferior Tire hacia arriba gire y suelte C RUPTOR NC #2 INFERIOR NO C MARRÓN PÚRPURA AMARILLO NARANJA AZUL ROJO 1 2 3 4 5 6 TIERRA Pentair se reserva el derecho a cambiar el contenido sin previo aviso página 6 Posicionador AVID EaziCal IR Instrucciones de instalación y operación Descripción de las piezas del EaziCal 3 Artículo # Cant. Descripción 1 2 3 4 5 6 7 8 9 10 1 Conjunto del alojamiento 1 Conjunto del eje 1 Conjunto de la cubierta 1Modmount 1 Conjunto del manifold 1 Conjunto electrónico 1 Conjunto de la placa de conectores 1 Conjunto del motor 1 Conjunto de ruptores mecánicos 1 Reductor de transmisor de salida * 7 8 2 5 6 1 Figura 10 Conjunto opcional de ruptores mecánicos o detector de proximidad 4 9 Procedimiento de calibración del transmisor del posicionador electroneumático 1. Calibre el posicionador según el manual de operación proporcionado con el producto. 2. Accione la válvula hasta el extremo horario total. 3. Haga bajar el engranaje principal del eje para desengranarlo de su posición de bloqueo, con un cuidado sumo en no hacer girar el engranaje principal del eje, porque esto descalibraría el posicionador. 4. Con el engranaje principal del eje abajado, haga girar el engranaje del transmisor hasta la posición del extremo antihorario, y observe la lectura (mA) del transmisor. Luego, haga girar el engranaje del transmisor en sentido horario hasta que el transmisor no cambie más de 0,5 mA a partir de la lectura anterior. 5. Gire el tornillo de ajuste horario de mA para ajustar la lectura del transmisor a la salida deseada para esta posición de válvula (normalmente son 4 mA ó 20 mA). 6. Lleve la válvula a su extremo antihorario completo. 7. Gire el tornillo de ajuste antihorario de mA para ajustar la lectura del transmisor a la salida deseada para esta posición de válvula. 8. Lleve la válvula por toda su carrera entre las posiciones totalmente horaria y totalmente antihoraria, comprobando y reajustando la salida (mA) según sea necesario. Eje principal Nota Engranaje principal del eje Solo están disponibles o bien interruptores o bien retransmisión. No están disponibles juntos. Tornillo de ajuste de mA para posición horaria Terminales 1 y 2 de salida de transmisor (no dependientes de polaridad) Tornillo de ajuste de mA para posición antihoraria * Reductor de transmisor de salida Figura 11 Pentair se reserva el derecho a cambiar el contenido sin previo aviso página 7 Posicionador AVID EaziCal IR Instrucciones de instalación y operación Datos técnicos Especificaciones de funcionamiento Corriente de entrada Tensión Presión del aire de alimentación Resolución Linealidad Histéresis Reproducibilidad Coeficiente térmico Caudal de salida Consumo de aire Temperatura de operación Ganancia Conexiones de aire Impedancia de entrada 4 a 20 mA (análoga) 9 volts (baja) 1 a 3 bar (akta) 2,6 a 7,8 bar 0,5% de gama ±1% de gama 0,4% de gama 0,4% de gama 3%/100°C 458 l/m @ 6.2 bar 0,225 l/m @ 6.2 bar -40°C a 85°C (-40°F a 185°F) Ajustable eléctricamente 1/4” NPT/G1/4 ISO 228 400 ohms 15 a 45 psi 40 a 120 psi Materiales de construcción Alojamiento Resina técnica (Nylon) Tapa Resina técnica transparente (Nylon) Eje Acero inoxidable Pasadores Acero inoxidable HiVueCopoliéster Montaje ModMount® Resina técnica (Nylon) Manifold Aluminio anodizado Interruptores mecánicos V3 Tipo Capacidad eléctrica SPDT forma C 15 amps/125/250 V ca 6 amps/24 V cc 0,5 amps/125 V cc 0,25 amps/250 V cc Clasificación de área y homologaciones A prueba de intemperie Homologación IP66 para propósitos generales Detectores de proximidad inductivos • Los detectores de proximidad inductivos están disponibles en configuraciones de cc a dos o tres hilos (5-36 V cc) PNP/NPN (NO/NC) o a dos hilos ca/cc (20-140 ca/10-140 cc). • Los detectores están disponibles en versiones con cuerpo rectangular para montaje enrasado. Alojamiento Entradas de cables 1 x 1/2” NPT 1 X M20 (nota 1) Nota 1 2 x M20 cuando se suministran interruptores o detectores. Pentair se reserva el derecho a cambiar el contenido sin previo aviso página 8 Posicionador AVID EaziCal IR Instrucciones de instalación y operación Cotas (mm) - Posicionador EaziCal IR - Montaje directo Pentair M20 PG 13.5 1/2” NPT 59 Dia. 190 54 133 151 93 98.8 67 Montaje ModMount® Actuador 130 108 19 Vista lateral 11 Vista superior 40,1 CRS 93,5 CRS Orificios de paso M5 19.0 ø 16.0 11.0 Flat Figura 12 Eje de salida estándar Pentair/Keystone Apéndice “A” Instrucciones para el montaje del posicionador EaziCal IR empleando una salida Namur estándar: 1. Extraiga el conjunto de brida de montaje directo Pentair del posicionador EaziCal IR. Nota: El posicionador EaziCal IR se entrega con un eje de salida Namur estándar. 2.Sustituya el conjunto de brida con una brida de montaje Namur estándar. Nota: La brida de montaje Namur estándar no está incluida. Detalles del eje Namur Pentair se reserva el derecho a cambiar el contenido sin previo aviso página 9