AUTOMATIZACIÓN DE UNA CASA A ESCALA. DOMÓTICA. Autor
Anuncio

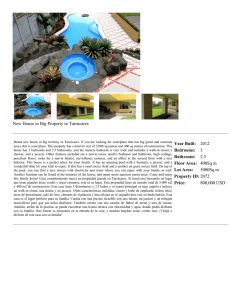
AUTOMATIZACIÓN DE UNA CASA A ESCALA. DOMÓTICA. Autor: Gregorio Grande, Pedro de. Director: Sánchez Miralles, Álvaro. Entidad Colaboradora: ICAI – Universidad Pontificia Comillas. RESUMEN DEL PROYECTO 1. Introducción Vivimos inmersos en un mundo inteligente. Teléfonos móviles que van más allá de las llamadas, automóviles que se conducen solos, o televisores capaces de servir contenido bajo demanda son sólo algunos de los objetos inteligentes que no hace tanto parecían de ciencia ficción y que ahora existen o existirán en un futuro próximo. Sin embargo, hay un campo en el que no se puede decir que dicha supuesta inteligencia esté presente hoy en día, o no al menos en la forma en que lo está en otros ámbitos, como los ya citados. Este no es otro que el de la domótica. 1.1 Estado de la técnica En la actualidad, los sistemas domóticos que se pueden encontrar en el mercado están enfocados principalmente al control centralizado del hogar, ya sea desde dentro o desde fuera, a través de internet. Un control centralizado es un paso adelante en el control del hogar, pero no se puede considerar como un sistema inteligente. Para serlo, tendría que controlar diferentes parámetros internos y externos de la casa y ser capaz de responder ante ellos, sin intervención directa de ninguna persona. Actualmente, los sistemas comerciales descuidan este aspecto, relegando la automatización a meras reglas IFTTT (IF This, Then That – si ocurre esto, entonces haz esto otro) o tareas programadas. Además, no siempre se le ofrece al usuario una interfaz de control sencilla de usar, lo que hace difícil su uso y su aceptación. La investigación actual y los nuevos productos derivados de ella sí que tienen en cuenta, en cambio, otros factores también importantes para el desarrollo de la domótica como son la interconexión de los diferentes elementos del hogar a través de la red (la llamada “internet de las cosas”) o el control desde el Smartphone de la climatización o la iluminación. Que exista una interconexión sólida entre los diferentes sistemas de una casa al más bajo nivel es fundamental para el desarrollo de los sistemas domóticos (se podrá tener un mayor control sobre dichos elementos y sistemas) y la integración del control centralizado en una herramienta como el Smartphone, presente en los bolsillos de cada vez más personas, acerca esta tecnología al usuario, haciéndola más natural y sencilla de usar. Sin embargo, todos estos desarrollos no definen en sí mismos la domótica, sino que son un vehículo indispensable para que la automatización pueda tener lugar. 1.2 Motivación y objetivos La motivación de este proyecto es conseguir crear un demostrador que permita probar y desarrollar algoritmos inteligentes de control y demostrar el funcionamiento de dichos algoritmos. Por tanto, se pretende: Desarrollar un sistema de control centralizado (empleando un ordenador), que permita una gestión automática de todos los parámetros de la casa, con el fin de dotarla de una autonomía real, sin necesidad de intervención humana, a la hora de controlar aspectos como la iluminación, la climatización, la seguridad y el riego de zonas exteriores. Dicho control también permite al usuario establecer diferentes parámetros de forma manual, así como actuar directamente sobre los distintos elementos de la casa a voluntad. El sistema también tiene en cuenta el consumo energético de la vivienda y es capaz de ajustar los niveles de confort de la misma con el fin de limitar el gasto si fuera necesario. Construir una maqueta a escala de una vivienda donde sea posible demostrar el control una vez desarrollado. Por un lado, una maqueta permite ser trasladada con facilidad, pudiendo así demostrar su funcionamiento donde sea necesario. Y, por otro lado, aun tratándose de un modelo a escala, se controla de la misma forma que una vivienda a tamaño real, con los mismos algoritmos de control y mismo software y se obtienen resultados escalables. Además, los costes del proyecto (incluyendo sensores y actuadores, con todo el material y cableado necesario para su instalación, y la propia casa), son mucho menores en el caso de la maqueta. 2. Metodología En el proyecto se pueden distinguir tres grandes bloques de funcionamiento: SENSORES/ ACTUADORES MICROCONTROLADORES dsPIC30F3010 SOFTWARE DE CONTROL (PC) Figura 1- Bloques principales del sistema El primer bloque, el de los sensores y actuadores, es el que permite obtener la información de los cambios internos y externos de la casa (luminosidad, temperatura, humedad y presencia) y, a su vez, permite que la casa responda de forma que se cumplan las consignas dictadas por el control. No existen circuitos de acondicionamiento de la medida de los sensores, esto es, no hay circuitos de puesta a cero ni de linealización. Esto se decidió realizar así por dos motivos: simplicidad y robustez. Es simple debido a que se reduce sensiblemente el número de componentes necesarios por cada sensor y se considera que es una solución más robusta debido a que se eliminan posibles fuentes de fallo intermedias o desajustes de la calibración que afecten a las medidas. Aprovechando la potencia de cálculo del software de control del ordenador, se ha preferido tomar la medida en bruto de la tensión correspondiente a cada sensor y operarla para obtener el valor de la magnitud medida. Los actuadores, por su parte, tienen la electrónica necesaria para su alimentación, así como la necesaria para poder controlar su funcionamiento, bien sea a base de transistores o de relés. Los microcontroladores empleados son los dsPIC30F3010 de Microchip. Como placa base para los mismos, se ha empleado una placa PicTrainer por cada uno de ellos. Estas placas contienen el zócalo para insertar el microcontrolador, pines accesibles para conectar circuitos electrónicos al microcontrolador, una zona apta para soldar componentes (en este caso, todos menos los sensores y actuadores en sí mismos, que están instalados en la casa empleando cables) y la circuitería necesaria para permitir la conexión al PC por medio de un cable USB. Figura 2- Placa PicTrainer con circuitos de acondicionamiento Para la programación de los microcontroladores, se ha usado el entorno de trabajo MPLAB IDE 8, empleando el lenguaje C. Para la labor de depuración y la programación definitiva de los mismos, se ha empleado un programador y debugger PICKit 3, también de Microchip. Los microcontroladores hacen de intermediarios entre los sensores y actuadores y el ordenador de control. Están programados con las funciones necesarias para poder medir la tensión de los sensores, empleando convertidores A/D, controlar los actuadores y comunicarse con el software de control del PC para transmitirle los valores medidos y recibir las órdenes que ejecutar sobre los actuadores. El software de control de PC, por su parte, es la interfaz de control de la casa, propiamente dicha. Permite controlar todos los parámetros de la casa, tanto de forma automática (empleando los algoritmos correspondientes) como de forma manual si se desea. Figura 3- Interfaz del software de control Consiste en una aplicación para Windows, desarrollada con Microsoft Visual Studio 2008 en Visual C++. Dispone de una interfaz gráfica en la que el usuario puede modificar las consignas de control por medio de controles visuales (que serán intuitivos y familiares para el usuario, tales como deslizadores o botones) y activar o desactivar las funciones del control automático que desee, así como obtener información sobre qué está ocurriendo en la casa (qué temperatura hay, qué nivel de iluminación hay en cada habitación, si se está regando o no, cuánta potencia se está consumiendo y cuántas personas hay y dónde se encuentran). El programa, en modo automático, sigue un bucle en el que lee los valores necesarios de los microcontroladores, realiza los cálculos correspondientes para transformarlos en las magnitudes de interés y aplica en cada caso el algoritmo correspondiente de control para conseguir que dichos valores se aproximen con la mayor exactitud posible a las consignas fijadas tanto por el usuario como por el propio control en caso de necesitar recortar el gasto energético. 3. Conclusiones Una vez que se juntan los tres grandes bloques del proyecto y se integran con la propia maqueta, el resultado obtenido es el de una casa a escala completamente automatizada que responde adecuadamente a las consignas que se fijan desde el control y es capaz de cambiar lo que sea necesario. A partir de aquí, este demostrador ya está preparado para poner a prueba la bondad de nuevos algoritmos de control, más rápidos, precisos y eficientes, que puedan llevarse después a una vivienda real. Por otro lado, tras evaluar el funcionamiento del demostrador se puede afirmar que se han cumplido satisfactoriamente los objetivos marcados al comienzo del proyecto. Figura 4- Aspecto final del demostrador AUTOMATION OF A MODEL HOUSE. DOMOTICS. SUMMARY 1. Introduction We live in an intelligent world. Mobile phones can do much more than just calling, there are cars that can be driven by themselves and televisions offer on-demand contents. These are just some intelligent objects that seemed like almost like sci-fi not so long ago but they do exist right now or will exist soon. However, there is still a field in which that intelligent is not present today or it is not in the way it is in other areas, such as those already mentioned. This is domotics, or home automation. 1.1 State of the art Nowadays, home automation systems are mainly aimed to offer the user a centralized control of the house whether from inside or from outside, through the internet. Centralized control is a step forward towards home automation, but cannot be considered as an intelligent system by itself. To be an intelligent system, that control should be able to control many internal and external parameters of the house and respond to them without the direct intervention of the user. Currently, most of the commercial home automation systems available in the market do not take care of this, offering automation systems based on IFTTT rules (IF This Then That) or scheduled tasks. Also, they do not pay enough attention to the user interface, turning the control of the system into a difficult task and making home automation systems undesirable. Current research and the new products derived from it, however, are focused on two important features for domotics such as the interconnection of different devices of the home through the internet (so called “the internet of the things”) or integrating lightning or climate control on the Smartphone. The first one, the interconnection between the different systems of the house at the lowest level is essential to develop the home automation systems in a way that let the system control almost everything in the house. The second one, the Smartphone integration of the control brings domotics nearer to the users, making them to interact with home automation systems in an easier and more natural way. However, all of those developments do not define domotics by themselves, but they are key features needed to make possible a real home automation. 1.2 Motivation and main aims The motivation for this project is to build a demonstrator that allows researchers to develop and try intelligent control algorithms and demonstrate its behaviour. Therefore, the aims of this project are: To develop a centralized control system (using a computer) able to manage automatically all parameters of the house without human intervention. It has to be able to control lightning, climate, security and irrigation. That control system also allows the user to set any parameter manually and control any device of the home. The control system also takes into account the power consumption of the house and is able to adjust the comfort levels of it to limit that consumption if necessary. To build a scale model of a house to demonstrate the behaviour of the developed control system. On one hand, a model can be moved easily making it possible to show its behaviour where necessary. And on the other hand, even being a scale house, it is controlled in the same way a full-size house is, with the same algorithms and the same control software. Also, the cost of the project is lower with a model house than with a full-size one (including the cost of bigger sensors and actuators, wiring and the house itself). 2. Methodology The automation system has three main parts: SENSORS/ ACTUATORS MICROCONTROLLERS dsPIC30F3010 CONTROL SOFTWARE (PC) Figure 1 - Main parts of the system The first one, the sensors and actuators one, lets the system to get the information of the internal and external changes of the house (light, temperature, humidity and presence) and also lets the house to respond to them in order to match the levels set by the control. There are no sensor-conditioning circuits (no zero adjustment or linearization circuits). This was decided so because it reduces significantly the number of necessary electronic components for each sensor and because it is considered a way more robust solution as it removes possible sources of failure or calibration mismatches that may alter the measurements. Taking advantage of the computing power of the computer control system, it was preferable to let the microcontroller read the raw voltage value coming from the sensor and calculate the actual measurement in the corresponding scale (lux, ºC…) on the computer. The actuators have circuits to supply them power and to control their behaviour, using transistors or relays. Microcontrollers used are dsPIC30F3010, made by Microchip. Each of these microcontrollers is installed on a PicTrainer board. These boards have the socket to insert the microcontroller, I/O pins to connect electronic circuits directly to the microcontroller pins, an area in which electronic components can be soldered (in this case, all components are soldered there but the sensors and actuators, which are installed in the house) and the circuitry necessary to connect the board to the PC via USB. Figure 2- PicTrainer board with some conditioning cirtcuits on it The development environment used to develop the microcontrollers’ software is MPLAB IDE 8, programming in C language. For the debugging and the programming of the microcontrollers, it has been used a PICKit 3, a Microchip programmer and debugger. The microcontrollers act as intermediaries between sensors and actuators and the control computer. They are programmed with the necessary functions to make them able to read the voltage of the sensors (using A/D converters), control the actuators and communicate with the control software on the PC to transfer the read values and receive the commands to control the actuator. The PC control software is the control interface of the house. It allows to control all the parameters of the house in an automatic way (using the right algorithms) or in a manual way if desired. Figure 3- Control software interface It is a Windows application, developed with Microsoft Visual Studio 2008 using Visual C++ language. It has a graphical interface in which the users can set any parameter they want using visual controls that will be familiar to them (such as sliders or buttons) and activate or deactivate any automatic function. They also can get information of what is happening in the house (what is the temperature or the lightning level on each room, if the garden is being irrigated or not, how many power is the house consuming and how many people are there in the house and where are they). The program, running in automatic mode, follows a loop in which reads the necessary values from the microcontrollers, calculates the real magnitudes behind those voltages and applies the corresponding control algorithm to get those values nearer to the user settings (or the control system own settings, in case of a cut in power consumption is needed). 3. Conclusion The result of these three parts working together and integrated with the model house is a fully automated model house capable to respond accurately to the commands of the control system and to make the necessary changes if there is any external change to hold the value of the controlled variables. From this point forward, this demonstrator is ready to try the goodness of new algorithms, making possible to develop in an easy way faster, more accurate and more efficient algorithms that can be installed later on a real house. Furthermore, after evaluating the performance of the demonstrator is proven that all the aims of this project have been reached successfully. Figure 4- Final appearance of the model house