Compensación en atraso-adelanto por el método de respuesta en
Anuncio

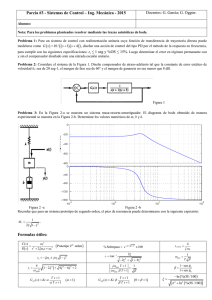
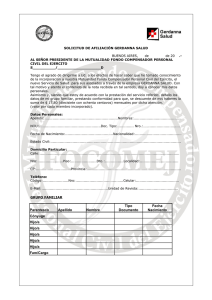
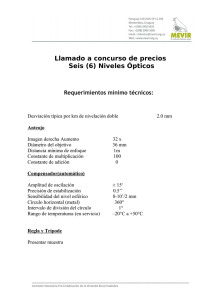
FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Compensación en atraso-adelanto por el método de respuesta en frecuencia CONTROL CLÁSICO 1 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Compensador electrónico en atraso-adelanto con amplificadores operacionales E0 ( s ) Ei ( s ) = ⎤ R4 R6 ⎡ ( R1 + R3 ) C1 s + 1 ⎤ ⎡ R2 C2 + 1 ⎥ ⎢ ⎥⎢ R3 R5 ⎣ R1C1 ⎦ ⎢⎣ ( R2 + R4 ) C2 s + 1 ⎥⎦ T1 = ( R1 + R3 ) C1 T1α = R1C1 T2 = R2 C2 β T2 = ( R2 + R4 ) C2 1 ⎛ s+ ⎜ E0 ( s ) ⎛ T s + 1 ⎞⎛ T2 s + 1 ⎞ T1 = K cαβ ⎜ 1 ⎟⎜ ⎟ = Kc ⎜ Ei ( s ) ⎜s+ 1 ⎝ α T1s + 1 ⎠⎝ β T2 s + 1 ⎠ ⎜ α T1 ⎝ α= R1 <1 R1 + R3 β= R2 + R4 >1 R2 Kc = 1 ⎞⎛ ⎟⎜ s + T 2 ⎟⎜ ⎟⎜ s + 1 ⎟⎜ β T2 ⎠⎝ ⎞ ⎟ ⎟ ⎟ ⎟ ⎠ R2 R4 R6 ( R1 + R3 ) R1 R3 R5 ( R2 + R4 ) La compensación de atraso-adelanto combina las ventajas de las compensaciones de atraso y de adelanto. La compensación de adelanto aumenta la velocidad de respuesta e incrementa la estabilidad del sistema. La compensación de atraso mejora la precisión en estado estable del sistema, pero reduce la velocidad de la respuesta. CONTROL CLÁSICO 2 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Diagrama de Bode de un compensador en atraso-adelanto con α = 0.1 y β = 10 1 ⎛ ⎜⎛ 1 ⎞ S + T 1 Gc ( S ) = ⎜ ⎜ ⎟ 1 α ⎜⎝ ⎠ S + ⎜ α T1 ⎝ 1 ⎞⎛ ⎟ ⎜⎛ 1 ⎞ S + T 2 ⎟ ⎜⎜ ⎟ 1 β ⎟ ⎜⎝ ⎠ S + ⎟⎜ β T2 ⎠⎝ ⎞ ⎟ ⎟ ⎟ ⎟ ⎠ Procedimiento Determine el valor de K para que cumpla con el coeficiente estático de error. Grafique el diagrama de Bode. Obtenga el Margen de fase y el Margen de ganancia con sus respectivas frecuencias. Escoja la nueva frecuencia de transición de ganancia ωm Calcule el ángulo necesario φm que deberá proporcionar el compensador en adelanto φm = −180° − ∠G ( jωm ) + MFesp + φadic (los grados adicionales φadic son aproximadamente 5˚, debido a la caída de ángulo proporcionada por el compensador en atraso, esto, ubicando al cero del compensador a una década antes de la nueva frecuencia de transición de ganancia ωm ). CONTROL CLÁSICO 3 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Si el compensador en adelanto no puede proporcionar este ángulo, porque φm > 65° deberemos escoger otra frecuencia (disminuya la frecuencia de transición de ganancia). Calcule el factor α y 10log α . ⎛ 1 − senφm ⎞ ⎟ ⎝ 1 + senφm ⎠ α =⎜ El compensador en atraso deberá proporcionar suficiente atenuación para que la magnitud en ωm sea de 10log α . La atenuación total que deberá proporcionar el compensador en atraso, es la magnitud G ( jωm ) más los 10log α . 20log β = G ( jωm ) − 10log α (Recuerde que el factor β debe ser menor a 17). Se ubica al cero del compensador en atraso una década por debajo de la nueva frecuencia de transición de ganancia ωm . El cero y el polo del compensador en atraso serán 1 ωm = T2 10 1 β T2 El cero y el polo del compensador en adelanto serán 1 = ωm α T1 1 α T1 El compensador en atraso- adelanto sería: 1 ⎛ ⎜⎛ 1 ⎞ S + T 1 Gc ( S ) = ⎜ ⎜ ⎟ 1 α ⎜⎝ ⎠ S + ⎜ α T1 ⎝ CONTROL CLÁSICO 4 1 ⎞⎛ ⎟ ⎜⎛ 1 ⎞ S + T 2 ⎟ ⎜⎜ ⎟ 1 β ⎟ ⎜⎝ ⎠ S + ⎟⎜ β T2 ⎠⎝ ⎞ ⎟ ⎟ ⎟ ⎟ ⎠ M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Ejemplo 1 La función de transferencia de lazo abierto de un sistema de control es G (s) = 24 K s ( s + 2 )( s + 6 ) Se desea que el sistema cumpla con las siguientes especificaciones: 1. El error en estado estable para una entrada rampa con pendiente 2π debe ser menor o iguala 2. Un margen de fase MF ≥ 45° 3. La frecuencia de cruce de ganancia ωc ≥ 1 rad seg π 10 Solución El coeficiente estático de error de velocidad del sistema original 24 K = 2K s ( s + 2 )( s + 6 ) K v = lim sG ( s ) = lim s s →0 El error de estado estable sería ess = Como se desea que el ess = π 10 s →0 R1 Kv para una entrada R1 = 2π , entonces 2π π = entonces K = 10 2 K 10 El sistema sería G (s) = 240 s ( s + 2 )( s + 6 ) El margen de fase para este sistema es MF = −20.78° MG = −7.93 dB ωc = 5.3 rad / seg ω = 3.47 rad / seg Se escoge como frecuencia de transición de ganancia la misma que la original o la que se encuentre más cercana a ella ωm = 4.7, ∠G ( jωm ) = −195°, G ( jωm ) = 2.356 dB φm = −180° − ∠G ( jωm ) + MFesp + φadic [los grados adicionales φadic son aproximadamente 5° , debido a la caída de ángulo proporcionada por el compensador en atraso, no se proporcionan grados adicionales debido al compensador en adelanto ya que no existe corrimiento de frecuencia]. φm = −180° − ( −195° ) + 45° + 5° = 65° CONTROL CLÁSICO 5 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Si el compensador en adelanto no puede proporcionar este ángulo (porque φm > 65° ) debemos escoger una frecuencia de transición de ganancia menor. Entonces ⎛ 1 − senφm ⎞ ⎛ 1 − sen65° ⎞ ⎟=⎜ ⎟ = 0.049 ⎝ 1 + senφm ⎠ ⎝ 1 + sen65° ⎠ α =⎜ 10log α = −13.098 dB Para determinar la ganancia que deberá proporcionar el compensador en atraso, recuerde que en la frecuencia de transición de ganancia ωm se debe de tener una magnitud de 10log α (magnitud negativa), entonces debemos de bajar la magnitud de G ( jωm ) hasta los 10log α (Recuerde que el factor β debe ser menor a 17) 20log β = G ( jωm ) − 10log α = 2.356 − ( −13.098) = 15.454 β = 5.925 Con los términos de ωm , α y β , podemos determinar la ubicación de los polos y ceros del compensador. El cero y el polo del compensador en adelanto sería CONTROL CLÁSICO 6 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL 1 = ωm α = 4.7 0.049 = 1.04 T1 1 1.04 = = 21.232 α T1 0.049 El cero y el polo del compensador en atraso sería 1 ωm = = 0.47 T2 10 1 0.47 = = 0.079 β T2 5.925 El compensador en atraso-adelanto sería ⎛ ( s + 1.04 ) 1 ⎞ ⎛ ( s + 0.47 ) 1 ⎞ Gc ( s ) = ⎜⎜ ⎟⎟ ⎜⎜ ⎟⎟ ⎝ ( s + 21.232 ) 0.049 ⎠ ⎝ ( s + 0.079 ) 5.925 ⎠ El ángulo que aporta el compensador en atraso en la nueva frecuencia de transición de ganancia ωm ∠Gc ( jωm ) = tan −1 ωm 0.47 − tan −1 ωm 0.079 = 84.289° − 89.037° = −4.75° El sistema compensado en atraso-adelanto ⎛ ⎞⎛ ( s + 1.04 ) 240 1 ⎞⎛ ( s + 0.47 ) 1 ⎞ G ( s ) Gc ( s ) = ⎜⎜ ⎟⎜ ⎟⎜ ⎟⎟ ⎟⎜ ⎟⎜ ⎝ s ( s + 2 )( s + 6 ) ⎠⎝ ( s + 21.232 ) 0.049 ⎠⎝ ( s + 0.079 ) 5.925 ⎠ K v = lim sG ( s ) Gc ( s ) = 19.91 seg −1 s →0 En ωm = 4.7 G ( jωm ) Gc ( jωm ) = 0.043 dB ∠G ( jωm ) Gc ( jωm ) = −134.73° Para el sistema compensado MF = 45.1° MG = 13.5 dB CONTROL CLÁSICO ωm = 4.72 rad / seg ω f = 11.9 rad / seg 7 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME CONTROL CLÁSICO COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA 8 UANL M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Ejemplo 2 Si seleccionamos una nueva frecuencia de transición de ganancia ω m = 2 ωm = 2 ∠G ( jω m ) = −153.43° G ( jω m ) = 16.532 dB φ m = −180° − ∠G ( jω m ) + MFesp + φ adic φ m = −180° − (− 153.43°) + 45° + 5° = 23.43° Entonces ⎛ 1 − senφ m α = ⎜⎜ ⎝ 1 + senφ m ⎞ ⎛ 1 − sen 23.43° ⎞ ⎟⎟ = ⎜⎜ ⎟⎟ = 0.431 ⎠ ⎝ 1 + sen 23.43° ⎠ 10 log α = −3.655 dB Para determinar la ganancia que deberá proporcionar el compensador en atraso, recuerde que en la frecuencia de transición de ganancia ω m se debe de tener una magnitud de 10 log α , entonces debemos de bajar la magnitud de G ( jω m ) hasta los 10 log α (Recuerde que el factor β debe ser menor a 17) 20 log β = G ( jω m ) − 10 log α = 16.532 + 3.655 = 20.187 β = 10.218 Con los términos de ω m , α y β , podemos determinar la ubicación de los polos y ceros del compensador El cero del compensador en adelanto sería 1 = ω m α = 2 0.431 = 1.313 T1 El polo 1 1.313 = = 3.046 αT1 0.431 El cero del compensador en atraso sería 1 ωm = = 0.2 T2 10 El polo 1 0.2 = = 0.019 βT2 10.218 El compensador en atraso-adelanto sería ⎛ (s + 1.313) 1 ⎞ ⎛ (s + 0.2 ) 1 ⎞ ⎟⎟ ⎜⎜ ⎟⎟ Gc (s ) = ⎜⎜ ⎝ (s + 3.046) 0.431 ⎠ ⎝ (s + 0.019) 10.218 ⎠ CONTROL CLÁSICO 9 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL El ángulo que aporta el compensador en atraso en la nueva frecuencia de transición de ganancia ω m ∠Gc ( jω m ) = tan −1 ωm ω − tan −1 m = 84.289° − 89.456° = −5.167° 0.2 0.019 El sistema compensado en atraso-adelanto ⎛ ⎞⎛ (s + 1.313) 1 ⎞⎛ (s + 0.2 ) 240 1 ⎞ ⎟⎟⎜⎜ ⎟⎟⎜⎜ ⎟⎟ G (s )Gc (s ) = ⎜⎜ ⎝ s (s + 2 )(s + 6) ⎠⎝ (s + 3.046) 0.431 ⎠⎝ (s + 0.019) 10.218 ⎠ K v = 20.606 seg −1 En ω m = 2 G ( jω m )Gc ( jω m ) = 0.043 dB ∠G ( jω m )Gc ( jω m ) = −135.17° Para el sistema compensado ω m = 2 rad / seg ω f = 4.71 rad / seg MF = 44.82° MG = 11.746 dB CONTROL CLÁSICO 10 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME CONTROL CLÁSICO COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA 11 UANL M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Ejemplo 3 La función de transferencia de lazo abierto de un sistema de control es G (s) = K s ( s + 1)( s + 2 ) Se desea que el sistema cumpla con las siguientes especificaciones: • El coeficiente estático de error de velocidad K v = 10 seg −1 • Un margen de fase MF = 50° • Un margen de ganancia de MG ≥ 10 dB Solución El coeficiente estático de error de velocidad del sistema original K v = lim sG ( s ) = lim s s →0 s →0 K K = s ( s + 1)( s + 2 ) 2 Como se desea que K v = 10 entonces K = 10 por lo que K = 20 2 El sistema sería G (s) = 20 s ( s + 1)( s + 2 ) El margen de fase para este sistema es ωc = 2.43 rad / seg MG = −10.51 dB ω f = 1.41 rad / seg MF = −28.17° Se escoge como frecuencia de transición de ganancia ωm = 0.5 ∠G ( jωm ) = −130.601° ωm = 0.5 G ( jωm ) = 24.788 dB φm = −180° − ∠G ( jωm ) + MFesp + φadic φm = −180° − ( −130.601° ) + 50° + 5° = 5.601° Entonces ⎛ 1 − senφ m ⎝ 1 + senφ m α = ⎜⎜ ⎞ ⎛ 1 − sen 5.601° ⎞ ⎟⎟ = ⎜⎜ ⎟⎟ = 0.822 ⎠ ⎝ 1 + sen 5.601° ⎠ 10 log α = −0.8507 dB CONTROL CLÁSICO 12 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Para determinar la ganancia que deberá proporcionar el compensador en atraso, recuerde que en la frecuencia de transición de ganancia ωm se debe de tener una magnitud de 10log α , entonces debemos de bajar la magnitud de G ( jωm ) hasta los 10log α (Recuerde que el factor β debe ser menor a 17) 20log β = G ( jωm ) − 10log α = 24.788 + 0.8507 = 25.639 β = 19.14 Como la β es mayor a 17, se puede aumentar la frecuencia de transición de ganancia ωm para que aumente el ángulo de adelanto φ m y disminuya la β . Seleccionamos una nueva frecuencia de transición de ganancia ω m = 1 ωm = 1 ∠G ( jωm ) = −161.565° G ( jωm ) = 16.02 dB φm = −180° − ∠G ( jωm ) + MFesp + φadic φm = −180° − ( −161.565° ) + 50° + 5° = 36.565° Entonces ⎛ 1 − senφm ⎝ 1 + senφm α =⎜ ⎞ ⎛ 1 − sen 36.565° ⎞ ⎟=⎜ ⎟ = 0.253 ⎠ ⎝ 1 + sen 36.565° ⎠ 10log α = −5.969 dB Para determinar la ganancia que deberá proporcionar el compensador en atraso, haremos. 20log β = G ( jωm ) − 10log α = 16.02 + 5.969 = 21.989 β = 12.573 Con los términos de ωm , α y β , podemos determinar la ubicación de los polos y ceros del compensador El cero y el polo del compensador en adelanto sería 1 = ωm α = 0.253 = 0.503 T1 1 0.503 = = 1.988 α T1 0.253 El cero y el polo del compensador en atraso sería CONTROL CLÁSICO 13 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL 1 ωm = = 0.1 T2 10 1 0.1 = = 0.0079 β T2 12.573 El compensador en atraso-adelanto sería ⎛ ( s + 0.503) 1 ⎞ ⎛ ( s + 0.1) 1 ⎞ Gc ( s ) = ⎜⎜ ⎟⎟ ⎜⎜ ⎟⎟ ⎝ ( s + 1.988 ) 0.253 ⎠ ⎝ ( s + 0.0079 ) 12.573 ⎠ El ángulo que aporta el compensador en atraso en la nueva frecuencia de transición de ganancia ωm ∠Gc ( jωm ) = tan −1 ωm 0.1 − tan −1 ωm 0.0079 = 84.289° − 89.547° = −5.258° El sistema compensado en atraso-adelanto ⎛ ⎞ ⎛ ( s + 0.503) 1 ⎞ ⎛ ( s + 0.1) 20 1 ⎞ G ( s ) Gc ( s ) = ⎜⎜ ⎟⎟ ⎜⎜ ⎟⎟ ⎜⎜ ⎟⎟ ⎝ s ( s + 1)( s + 2 ) ⎠ ⎝ ( s + 1.988 ) 0.253 ⎠ ⎝ ( s + 0.0079 ) 12.573 ⎠ K v = 10.068 seg −1 En ωm = 1 G ( jωm ) Gc ( jωm ) = 0.044 dB ∠G ( jωm ) Gc ( jωm ) = −130.23° Para el sistema compensado ωm = 1 rad / seg MG = 11.37 dB ω f = 2.33 rad / seg MF = 49.77° CONTROL CLÁSICO 14 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME CONTROL CLÁSICO COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA 15 UANL M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Ejemplo 1 La función de transferencia de lazo abierto de un sistema de control es G (s) = 4K s ( s + 2) Se desea que el sistema cumpla con las siguientes especificaciones 1. El coeficiente estático de error de velocidad K v = 20 seg −1 2. El margen de fase MF ≥ 50° 3. El margen de ganancia MG ≥ 10 dB Solución El coeficiente estático de error de velocidad del sistema original K v = lim sG ( s ) = lim s s →0 s →0 Como se desea que K v = 20 seg −1 entonces 2 K = 20 4K = 2K s ( s + 2) K = 10 El sistema sería G (s) = 40 s ( s + 2) El margen de fase para este sistema es MF = 17.96° ωc = 6.17 rad / seg MG = ∞ El ángulo que debe de proporcionar el compensador en atraso φm = −180° + MFesp + φadic Se consideran 5° como grados adicionales φadic , si se piensa en ubicar el cero del compensador en atraso a una década antes del la nueva frecuencia de transición de ganancia ωm φm = 180° + 50° + 5° = −125° en ω = 1.4 tenemos una defasamiento de -125° y una magnitud de 21.366 dB, ésta será la nueva frecuencia de transición de ganancia ωm = 1.4 El compensador en atraso deberá proporcionar la ganancia de 21.366 dB 20log β = 21.366 ⇒ β = 11.703 CONTROL CLÁSICO 16 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA UANL Se ubica al cero del compensador a una década antes de la nueva frecuencia de transición de ganancia El cero del compensador sería 1 ωm 1.4 = = = 0.14 T 10 10 El polo 1 0.14 = = 0.012 β T 11.703 El compensador sería ⎛ 1 s+ 1⎜ T Gc ( s ) = ⎜ β ⎜s+ 1 ⎜ βT ⎝ ⎞ ⎟ 1 ⎛ s + 0.14 ⎞ ⎟= ⎜ ⎟ ⎟ 11.703 ⎝ s + 0.012 ⎠ ⎟ ⎠ El ángulo que aporta el compensador en atraso sobre la nueva frecuencia de transición de ganancia ωm = 1.4 es ∠Gc ( jω ) = tan −1 ω 0.14 − tan −1 ω 0.012 = 84.289° − 89.509° = −5.22° El sistema compensado es ⎛ 40 ⎞ ⎛ s + 0.14 ⎞ 1 G ( s ) Gc ( s ) = ⎜⎜ ⎟⎟ ⎜ ⎟ ⎝ s ( s + 2 ) ⎠ ⎝ s + 0.012 ⎠ 11.703 En ωm = 1.4 G ( jωm ) Gc ( jωm ) = 0.043 dB ∠G ( jωm ) Gc ( jωm ) = −130.21° Para el sistema compensado MF = 49.79° ωm = 1.4 rad / seg MG = ∞ CONTROL CLÁSICO 17 M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ. FIME CONTROL CLÁSICO COMPENSACIÓN EN ATRASO-ADELANTO POR EL MÉTODO DE RESPUESTA EN FRECUENCIA 18 UANL M.C. JOSÉ MANUEL ROCHA NUÑEZ M.C. ELIZABETH GPE. LARA HDZ.