Análisis Dinámico - Ingeniería Mecánica Aplicada y Computacional
Anuncio

ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Análisis Dinámico
Definición
La Dinámica es la rama de la Mecánica que se ocupa
del estudio del movimiento, considerando las causas
que lo producen y sus efectos.
efectos
PROBLEMAS
DINÁMICOS:
TEORÍA DE MÁQUINAS
J.M. Pintor Borobia
J.M. Jiménez Bascones
Posición de equilibrio estable.
Dinámica directa o simulación dinámica.
Dinámica inversa.
Linealización de las ecuaciones del movimiento.
- 4.1
4.1 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Posición de Equilibrio
Estable
OBJETIVO:
PLANTEAMIENTO DEL PROBLEMA:
OBSERVACIONES:
Obtención de la posición de equilibrio del mecanismo
sometido a la acción de un conjunto de solicitaciones
exteriores.
exteriores
J.M. Pintor Borobia
J.M. Jiménez Bascones
Incógnitas: Vector de coordenadas dependientes q.
Datos:
Datos inerciales y geométricos del mecanismo.
Solicitaciones exteriores.
Aproximación inicial del vector de coordenadas.
Se trata de un problema no lineal ⇒ MÉTODOS ITERATIVOS
TEORÍA DE MÁQUINAS
- 4.2
4.2 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Simulación Dinámica
OBJETIVO:
Determinar de la respuesta en el tiempo del mecanismo sometido a la
acción de un conjunto de solicitaciones exteriores.
PLANTEAMIENTO DEL PROBLEMA:
Incógnitas: Respuesta en el tiempo del mecanismo (posiciones, velocidades,
aceleraciones, reacciones en los pares, etc.)
Datos:
Datos inerciales y geométricos del mecanismo.
Solicitaciones exteriores.
Condiciones iniciales de los grados de libertad.
OBSERVACIONES:
J.M. Pintor Borobia
J.M. Jiménez Bascones
Requiere la solución de un sistema de ecuaciones diferenciales.
diferenciales
Las coordenadas que definen el mecanismo son dependientes.
TEORÍA DE MÁQUINAS
- 4.3
4.3 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
OBJETIVO:
Problema Dinámico
Inverso
Obtención de los esfuerzos motores que originan un
movimiento dado en el mecanismo.
PLANTEAMIENTO DEL PROBLEMA:
OBSERVACIONES:
Junto con los esfuerzos motores, es habitual el cálculo de las
reacciones en los pares cinemáticos.
cinemáticos
TEORÍA DE MÁQUINAS
- 4.4
4.4 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
Incógnitas: Esfuerzos motores que originan el movimiento.
Datos:
Datos inerciales y geométricos del mecanismo.
Solicitaciones exteriores.
Datos cinemáticos del movimiento.
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
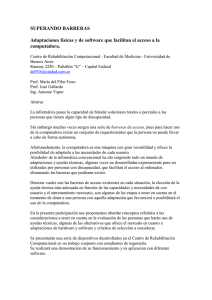
Péndulo Simple (I)
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Diagrama del péndulo
Diagrama de sólido libre
Rx
y
θ
Ry
x
θ
m&x&
m
m&y& + mg
TEORÍA DE MÁQUINAS
- 4.5
4.5 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Ecs. de equilibrio dinámico
∑F
= 0 = Rx − m&x&
∑F
= 0 = R y − m&y& − mg
x
y
∑M
o
Cinemática
x = L cosθ
y = L sen θ
= 0 = (− m&x&) y − (− m&y& − mg )x
x& = − L sen θθ&
y& = L cosθθ&
&x& = − L sen θθ&& − L cosθθ& 2
&y& = L cosθθ&& − L sen θθ& 2
Sustituyendo las ecuaciones de la cinemática en las
ecuaciones de equilibrio dinámico
J.M. Pintor Borobia
J.M. Jiménez Bascones
Péndulo Simple (II)
mL2θ&& + mLg cosθ = 0
g
θ&& + cosθ = 0
L
TEORÍA DE MÁQUINAS
- 4.6
4.6 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Péndulo Simple (III)
Función Lagrangiana
(
)
Cinemática
x = L cosθ
1
T = m x& 2 + y& 2
2
V = mgy
1
L = T − V = m x& 2 + y& 2 − mgy
2
(
y = L sen θ
x& = − L sen θθ&
y& = L cosθθ&
)
Ecs. de Lagrange
d ∂L ∂L
&− = 0
dt ∂θ ∂θ
1
L = mL2θ& 2 − mgL sen θ
2
θ&& +
TEORÍA DE MÁQUINAS
J.M. Pintor Borobia
J.M. Jiménez Bascones
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
g
cosθ = 0
L
- 4.7
4.7 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
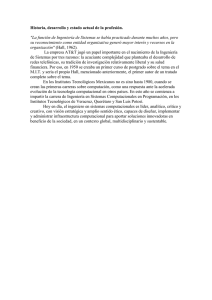
Biela-manivela (I)
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Diagrama del mecanismo
Diagramas de sólido libre
R2y
y
R2x
B (x,y)
L
(x1,y1)
A (0,0)
R2y
L
m
R2x
m&x&1
m
(x2,y2)
m&x&2
θ
m&y&2 + mg
C (s,0)
x
R1x
m&y&1 + mg
m
R1y
TEORÍA DE MÁQUINAS
m&s&
R3y
- 4.8
4.8 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Biela-manivela (II)
Ecuaciones
de equilibrio dinámico
Ecuaciones
de cinemática
R2 x − m&x&2 − m&s& = 0
R1x − R2 x − m&x&1 = 0
&
&
R1 y − R2 y − m( &y&1 + g ) = 0
(
)
+
−
+
=
R
R
m
y
g
0
2y
3y
2
yR2 x + y1m&x&1 − xR2 y − x1m( &y&1 + g ) = 0 yR2 x − y1m&x&2 + xR2 y − x1m( &y&2 + g ) = 0
x& = − L sen θθ&
y& = L cosθθ&
x&1 = x& 2
y&1 = y& 2
x&2 = 3x& 2
y& 2 = y& 2
s& = 2 x&
&x& = − L sen θθ&& − L cosθθ& 2
&y& = L cosθθ&& − L sen θθ& 2
&x&1 = &x& 2
&y&1 = &y& 2
&x&2 = 3&x& 2
&y&2 = &y& 2
&s& = 2 &x&
TEORÍA DE MÁQUINAS
J.M. Pintor Borobia
J.M. Jiménez Bascones
x = L cosθ
y = L sen θ
x1 = x 2
y1 = y 2
x2 = 3 x 2
y2 = y 2
s = 2x
- 4.9
4.9 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Operando
Biela-manivela (III)
en las ecuaciones de equilibrio dinámico
R2 x = 7 m&x&1
2 yR2 x + y1m(&x&1 − &x&2 ) − x1m( &y&1 + &y&2 + 2 g ) = 0
Sustituyendo
las ecuaciones de la cinemática en las
ecuaciones de equilibrio dinámico
(
J.M. Pintor Borobia
J.M. Jiménez Bascones
13 ym&x& − xm&y& − 2 xmg = 0
)
g
2
&
&
&
1 + 12 sen θ θ + 12 sen θ cosθθ + 2 cosθ = 0
L
2
TEORÍA DE MÁQUINAS
- 4.10
4.10 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Biela-manivela (IV)
Función Lagrangiana
(
)
(
)
1
1
1
m x&12 + y&12 + m x& 22 + y& 22 + ms& 2
2
2
2
V = mgy1 + mgy2
T=
1 2 &2
T = mL θ + 3mL2 sen 2 θθ& 2
4
V = mgL sen θ
1
L = mL2θ& 2 + 3mL2 sen 2 θθ& 2 − mgL sen θ
4
Cinemática
x& = − L sen θθ&
y& = L cosθθ&
x&1 = x& 2
&y1 = y& 2
x&2 = 3x& 2
y& 2 = y& 2
s& = 2 x&
Ecuaciones de Lagrange
d ∂L ∂L
&− = 0
dt ∂θ ∂θ
(1 + 12 sen θ )θ&& + 12 sen θ cosθθ&
2
TEORÍA DE MÁQUINAS
2
+2
g
cosθ = 0
L
- 4.11
4.11 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
1.
Planteamiento del
problema dinámico
Definición del modelo matemático
Selección de las coordenadas
3.
Resolución de la cinemática
Planteamiento de las ecuaciones del movimiento
Fuerzas de inercia
Fuerzas exteriores
4.
Integración en el tiempo de las ecs. del movimiento
Ecuaciones diferenciales no lineales de 2º grado
TEORÍA DE MÁQUINAS
- 4.12
4.12 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
2.
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Ecuaciones del
Movimiento (I)
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Ecuaciones de Newton-Euler:
Euler
∑ (F − ma ) = 0
i
i
i
∑ (N
i
& i − ωi × J Gωi ) = 0
− J Gω
i
DIFICULTADES que plantean:
Conducen a grandes sistemas de ecuaciones.
ecuaciones
Incluyen entre las incógnitas las reacciones en los pares cinemáticos.
En ciertos mecanismos, pueden aparecer más incógnitas que ecuaciones ⇒
el problema puede no estar determinado.
TEORÍA DE MÁQUINAS
- 4.13
4.13 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Ecuaciones del
Movimiento (II)
Ecuaciones de LAGRANGE:
LAGRANGE
Principio de los TRABAJOS VIRTUALES:
VIRTUALES
δqT (Fin − Q ) = 0
Principio de las POTENCIAS VIRTUALES:
VIRTUALES
~& T (F − Q ) = 0
q
in
Principio de HAMILTON:
HAMILTON
∫
t2
t1
d ∂L ∂L
−
+ ΦTq λ = Q ext
dt ∂q& ∂q
δ (L + Wext )dt + ∫ δ (ΦTq λ )dt = 0
t2
J.M. Pintor Borobia
J.M. Jiménez Bascones
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
t1
Otros: ecuaciones de Gibbs-Appell,...
TEORÍA DE MÁQUINAS
- 4.14
4.14 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Formulación Numérica
Energía cinética:
rj
n
Posición del elemento
definida por dos puntos.
exteriores:
fuerzas generalizadas
t
Fuerzas
Fuerzas puntuales.
Resortes y
amortiguadores.
ri
x j − xi
t=
y
−
y
i
j
− y j + yi
n=
x
−
x
j i
TEORÍA DE MÁQUINAS
- 4.15
4.15 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
matriz de masas
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Matriz de Masas (I)
ENERGÍA CINÉTICA de un elemento
1 T
Te = ∫ r& r&dm
2 V
rígido:
Posición de un punto genérico viene dada
por:
x 1 − ct
r= =
y − cn
cn
1 − ct
ct
cn
TEORÍA DE MÁQUINAS
J.M. Pintor Borobia
J.M. Jiménez Bascones
x xi + ct (x j − xi ) − cn ( y j − yi )
r= =
(
)
(
)
y
y
+
c
y
−
y
+
c
x
−
x
i
n
j
i
i t j
− cn t
t
=
C
n
ct n
- 4.16
4.16 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Matriz de Masas (II)
Velocidad del punto viene
dada por:
&
x& x&i + ct (x& j − x&i ) − cn ( y& j − y& i )
t
&r = =
= Cn&
&
&
&
&
&
&
(
)
(
)
y
y
+
c
y
−
y
+
c
x
−
x
i
n
j
i
i t j
en la expresión de la energía cinética:
cinética
1
1
Te = ∫ r& T r&dm = {t&
2 V
2
n& }
T
(
)
& 1 T
t
∫VC Cdm n& = 2 q& e M eq& e
T
J.M. Pintor Borobia
J.M. Jiménez Bascones
Sustituyendo
M e = ∫ CT Cdm
V
TEORÍA DE MÁQUINAS
- 4.17
4.17 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
La
Matriz de Masas (III)
matriz de masas se escribe como,
M e = ∫ CT Cdm
(1 − ct )2 + cn2
0
Me = ∫
V (1 − c )c − c 2
t
t
n
− cn
0
(1 − ct )ct − cn2
cn
(1 − ct )ct − cn2
cn
ct2 + cn2
0
(1 − ct )2 + cn2
TEORÍA DE MÁQUINAS
− cn
(1 − ct )ct − cn2 dm
0
ct2 + cn2
- 4.18
4.18 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
V
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Matriz de Masas (IV)
Los TÉRMINOS DE LA MATRIZ DE MASAS se
calculan con:
∫ dm = m
V
x j − xi
r − ri = ct t + cn n ⇒
y j − yi
e
− y j + yi ct x − xi
=
x j − xi cn y − yi
J.M. Pintor Borobia
J.M. Jiménez Bascones
ct
x − xi
c = A y − y
i
n
x − xi
ct
xG − xi
∫V cn dm = A ∫V y − yi dm = me A yG − yi
TEORÍA DE MÁQUINAS
- 4.19
4.19 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Matriz de Masas (V)
Los TÉRMINOS DE LA MATRIZ DE MASAS se
c
∫V ct cn
2
t
2
(
)
x
−
x
ct cn
i
dm
=
A
∫V (x − xi )( y − yi )
cn2
ct2
∫V ct cn
I xx − 2me xG xi + me xi2
A
I xy − me xG yi − me yG xi + me xi yi
(x
calculan con:
− xi )( y − yi ) T
dm A
2
(y − yi )
ct cn
dm =
cn2
I xy − me xG yi − me yG xi + me xi yi T
A
2
I yy − 2me yG yi + me yi
TEORÍA DE MÁQUINAS
- 4.20
4.20 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Fuerzas Puntuales
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Potencial virtual de una fuerza
puntual: W~& = ~r& T F
F
Posición y velocidad virtual del
n
punto de aplicación:
r = C t
n
~&
~
r& = C~t&
n
Vector FUERZA GENERALIZADA:
GENERALIZADA
{
~&
~
WF = ~
r& T F = t& T
F
}
rj
r
t
ri
J.M. Pintor Borobia
J.M. Jiménez Bascones
~& T CT F ⇒ Q = CT F
n
TEORÍA DE MÁQUINAS
- 4.21
4.21 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Resortes
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Posición de los extremos del resorte:
t
t
r1 = C1 1 r2 = C 2 2
n1
n 2
n1
r1
t1
Valor de la fuerza aplicada:
(
Fr = k d12 − d
Fr
0
12
)
r2 − r1
r2 − r1
n2
El caso se reduce a un PROBLEMA
DE FUERZAS PUNTUALES:
Q1 = C1T Fr
Q 2 = −CT2 Fr
TEORÍA DE MÁQUINAS
r2
-Fr
J.M. Pintor Borobia
J.M. Jiménez Bascones
t2
- 4.22
4.22 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Amortiguadores
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Velocidad de los extremos
del amortiguador:
&1
t
r&1 = C1
n& 1
&2
t
r&2 = C 2
n& 2
Fc
n1
r1
t1
Valor de la fuerza aplicada:
aplicada
T
(
r&2 − r&1 ) (r2 − r1 )
(r2 − r1 )
Fc = c
T
(r2 − r1 ) (r2 − r1 )
El caso se reduce a un PROBLEMA
DE FUERZAS PUNTUALES:
Q1 = C1T Fc
Q 2 = −CT2 Fc
TEORÍA DE MÁQUINAS
n2
r2
-Fc
J.M. Pintor Borobia
J.M. Jiménez Bascones
t2
- 4.23
4.23 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
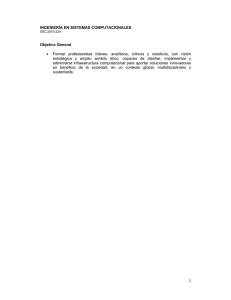
Ensamblado del sistema
de ecuaciones (I)
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Diagrama del mecanismo
Diagramas de sólido libre
R2y
y
B (xb,yb)
L
R2y
L
m
A (xa,ya)
R2x
R2x
m&x&1
m
θ
C (xc,yc)
m&x&2
m&y&2 + mg
x
R1x
m&y&1 + mg
m
R1y
TEORÍA DE MÁQUINAS
m&s&
R3y
- 4.24
4.24 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Ensamblado del sistema
de ecuaciones (II)
Eslabón 1
Eslabón 2
m&x&1
m&x&2
m&y&2 + mg
m&y&1 + mg
m1ab − m1ba &x&a
m1ba m1ab &y&a
0 &x&b
m1b
0
m1b &y&b
q1xa
q1 ya
q
1xb
q1 yb
0 m2bc − m1cb &x&b
m2b
0
m2b m1cb m2bc &y&b
m
m1cb m2 c
0 &x&c
2 bc
&&
−
m
m
0
m
2 c yc
1cb 2bc
TEORÍA DE MÁQUINAS
q2 xb
q2 yb
q
2 xc
q2 yc
- 4.25
4.25 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
0
m1a
0
m1a
m
m1ba
1ab
− m1ba m1ab
m&s&
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
de masas y vector de fuerzas del mecanismo
m1a
m
Fin = 1ab
− m1ba
m1a
m1ba
m1ab
m1ab
m1ba
m1b + m2b
m2bc
− m2cb
− m1ba
m1ab
m1b + m2b
m2cb
m2bc
m2bc
m2cb
m2c
&x&a
&y&a
− m2cb &x&b
m2bc &y&b
&x&c
m2c &y&c
q1xa 0 0
0
q1 ya 0 − mg 2
0
q q2 xb 0
0
Q = 1xb + q =
+ − mg 2
− mg 2
2 yb
q1 yb q
0
0
2
xc
0
−
mg
2
−
mg
0
q
0 2 yc
TEORÍA DE MÁQUINAS
J.M. Pintor Borobia
J.M. Jiménez Bascones
Matriz
Ensamblado del sistema
de ecuaciones (III)
- 4.26
4.26 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Matriz
Ensamblado del sistema
de ecuaciones (IV)
de masas y vector de fuerzas del mecanismo
m1a
m1ab
− m1ba
&x&a 0
&
&
m
m
m
y
−
mg
2
a
1a
1ba
1ab
m m m + m2b
m2bc − m2cb &x&b 0
~
x&a ~
y& a ~
x&b ~
y& b ~
x&c ~
y& c 1ab 1ba 1b
−
=0
− m1ba m1ab
m1b + m2b m2cb m2bc &y&b − mg
0
&
&
m2bc
m2cb m2c
x
c
−
3
mg
2
− m2cb
m2bc
m2c &y&c
{
}
m1b + m2b
m2bc − m2cb &x&b 0
&
&
m
+
m
m
m
y
−
mg
~
1b
2b
2 cb
2 bc
b
x&b ~
y& b ~
x&c ~
y& c
− 0 = 0
&
&
m
m
m
x
2 bc
2 cb
2c
c − 3mg 2
−m
m2bc
m2c &y&c
2 cb
}
TEORÍA DE MÁQUINAS
J.M. Pintor Borobia
J.M. Jiménez Bascones
{
- 4.27
4.27 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Multiplicadores de
Lagrange (I)
Del Principio de las Potencias Virtuales:
Virtuales
~& T (F − Q ) = q
~& T (Mq
&& − Q ) = 0
q
in
donde el vector de velocidades virtuales está sujeto a las
ecuaciones de restricción formuladas de la forma:
Las velocidades virtuales se eliminan mediante un vector de
incógnitas adicionales ⇒ los MULTIPLICADORES DE
LAGRANGE:
LAGRANGE
&& + ΦTq λ = Q
Mq
TEORÍA DE MÁQUINAS
- 4.28
4.28 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
~& = 0
Φ qq
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Multiplicadores de
Lagrange (II)
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
ecuaciones dinámicas se completan con las
restricciones derivadas dos veces:
veces
Las
&
& q q& − Φ
&& = − Φ
Φ qq
t
llega así a un conjunto de ecuaciones
diferenciales algebraicas que se debe INTEGRAR
EN EL TIEMPO:
M
Φ q
Q
&&
ΦTq q
= & & &
0 λ − Φ q q − Φ t
TEORÍA DE MÁQUINAS
- 4.29
4.29 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
Se
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Ecuaciones del Mov. en
Coords. Independientes
Las coordenadas dependientes se expresan como:
Derivando esta ecuación para las velocidades virtuales y las
aceleraciones reales:
q = q (z )
~& = R (z )~z&
q
En el PRINCIPIO DE LAS POTENCIAS VIRTUALES:
VIRTUALES
~& T (Mq
&& − Q ) = 0
q
~z& T R T (Mq
&& − Q ) = 0
& z& ) − Q ) = 0
R T (M (R&z& + R
& z& )
R T MR&z& = R T (Q − MR
que es un sistema de ecuaciones diferenciales
ordinarias.
ordinarias
TEORÍA DE MÁQUINAS
- 4.30
4.30 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
&& = R&z& + R& z&
q
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Características
Integración Numérica (I)
de las ecuaciones del movimiento
Coord. dependientes
Diferenciales algebraicas
Segundo orden
No-lineales
M
Φ q
Q
&&
ΦTq q
= & & &
0 λ − Φ q q − Φ t
Coord. Independientes
Diferenciales ordinarias
Segundo orden
No-lineales
& z& )
R T MR&z& = R T (Q − MR
TEORÍA DE MÁQUINAS
J.M. Pintor Borobia
J.M. Jiménez Bascones
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
- 4.31
4.31 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Integración
Integración Numérica (II)
de ecuaciones de segundo orden
Integradores de primer orden
y& = f (y , t )
Transformación de las ecuaciones de segundo orden en
ecuaciones de primer orden
TEORÍA DE MÁQUINAS
J.M. Pintor Borobia
J.M. Jiménez Bascones
q
q& q
y = y& = = f , t
&& q&
q&
q
- 4.32
4.32 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Integración
Numérica (III)
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
en coordenadas dependientes
−1
Q
&& M Φ
q
λ = Φ 0 − Φ
&
& q& − Φ
q
t
q
T
q
q
q&
t
q&
q
&
&
t
J.M. Pintor Borobia
J.M. Jiménez Bascones
Integración
q
q&
t + ∆t
TEORÍA DE MÁQUINAS
- 4.33
4.33 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Algoritmo de cálculo en coordenadas dependientes
1.
2.
3.
4.
5.
6.
Posición y velocidad (dependientes) en t
M
Matriz de masas
Φ q = Φ q (q )
Matriz jacobiana
Q = Q(q,q& , t )
Fuerzas exteriores
&
& q q& − Φ
−Φ
t
Término de aceleraciones
T −1
Q
&& M Φ q
q
Derivada
=
λ
TEORÍA DE MÁQUINAS
Φ
q
&
& q q& − Φ
0 − Φ
t
- 4.34
4.34 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
Integración
Numérica (IV)
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
Integración
Numérica (V)
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
en coordenadas independientes
(
&z& = R MR
T
)
−1
& z& )
R T (Q − MR
q
z&
t
q&
&z&
t
J.M. Pintor Borobia
J.M. Jiménez Bascones
Integración
q
z&
t + ∆t
TEORÍA DE MÁQUINAS
- 4.35
4.35 -
ANÁLISIS
ANÁLISIS COMPUTACIONAL
COMPUTACIONAL
TEMA
44
TEMA
Análisis
Dinámico
Análisis
Dinámicodede
Mecanismos
Mecanismos
Algoritmo de cálculo en coordenadas independientes
1.
2.
3.
4.
5.
6.
7.
Posición (dependiente) y velocidad (independiente) en t
R = R (q )
Matriz de transformación
q& = Rz&
Velocidades dependientes
R T MR = M (q )
Matriz de masas
Fuerzas exteriores
R T Q = Q (q, q& , t )
& z&
Término de aceleraciones
R T MR
−1 T
T
Derivada
& z& )
&z& = (R MR ) R (Q − MR
TEORÍA DE MÁQUINAS
- 4.36
4.36 -
J.M. Pintor Borobia
J.M. Jiménez Bascones
Integración
Numérica (VI)