3 - Ascon Tecnologic S.r.l.
Anuncio

Regulador de proceso
Dual loop, Multientrada,
Multisalidas, Multifunciones
Serie QD
Dual Loop Process Controller
Multi-input, Multi-output
Multi-functions
Series QD
INSTRUCCIONES PARA EL USO
INSTRUCTION MANUAL
M.I.U. QD - 1/96.05
Cód. J30 - 304 - 1AQD-IE
°C
PV
AT
1
SCI
X
MAN
SV
REM
W
°F
2
3
MV 4
Y
5
W
W/SV
F
A/M
QD
SERIES
ASCON spa
model
:
ser
ial n.: :
supply
PID
ÍNDICE
1
2
3
4
5
6
7
8
9
IDENTIFICACIÓN MODELO
pág.
2
DIMENSIONES E INSTALACIÓN
pág.
3
CONEXIONES ELÉCTRICAS
pág.
4
FUNCIONES DE LAS TECLAS Y DE LAS PANTALLAS
pág.
12
CONFIGURACIÓN
pág.
14
PROCESO DE PROGRAMACIÓN
pág.
20
1Loop Estándar
pág.
21
1Loop Cascada
pág.
25
1Loop Relación
pág.
29
2Loops Independientes
pág.
33
Descripción parámetros
pág.
37
INSTRUCCIONES DE FUNCIONAMIENTO
véase el folio adjunto
DATOS TÉCNICOS
pág.
42
COMUNICACIÓN SERIAL (Véase MIU-CS)
facilitado aparte
INSTRUCCIONES PARA LA CONSULTA
Para facilitar la consulta, este manual ha sido realizado con algunas páginas
apribles en libro y/o en fuelle.
Conexiones eléctricas
5
6
5
7
8
5
9
10
11
Configuración
16
18
16
19
17
18
19
Programación
1 Loop Estándar
16
21
17
22
23
24
1 Loop Cascada
16
1 Loop Relación
16
29
30
31
32
25
26
27
28
2 Loops Independientes
16
33
34
35
36
1
I
1
Gracias por haber elegido un regulador ASCON.
Los instrumentos pertenecientes a la serie QD son reguladores con dos
loops de regulación son configurables como 1 loop, cascada, relación, o
2 loops independientes.
Son universales, muy potentes pero fáciles de usar.
Están equipados con AUTO-TUNE para ayudar en la puesta en servicio del
equipo y con comunicación serial para su inserción en una red de control
distribuido.
Están completos ya que comprenden todas las variantes posibles.
Al configurar el instrumento se puede determinar el modo de funcionamiento
dependiendo de la aplicación requerida.
1.1
Sigla del modelo
Código modelo : QD
A B C 0
°C
PV
AT
1
SCI
X
PID
MAN
SV
REM
W
°F
2
3
MV 4
W
Y
W/SV
F
5
model
:
ser
ial n.: :
supply
I
IDENTIFICACIÓN MODELO
A/M
QD - 3000
Código modelo: QD A B C 0 Alimentación
Alimentación
Comunicación serial RS 485
Salida analógica auxiliar Y6
2
A
100…240V 50/60 Hz
16…28V 50/60 Hz y 20…30V dc
3
5
Comunicación serial (opción)
No prevista
RS485 Modbus - Jbus
B
Salida auxiliar Y6 (opción)
No prevista
0/4…20mA, 0/1…5V, 0…10V
C
0
3
0
1
14
2
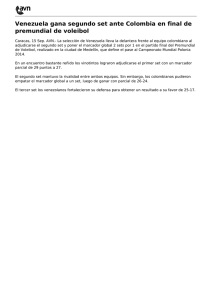
DIMENSIONES E INSTALACIÓN
2.1
Dimensiones totales
I
92+0.8
154,5
96
92+0.8
100 mín.
150 mín
con protección IP67
96
91,5
100 mín
115 mín
con protección IP67
Máximo 7mm
2.2
Instalación en cuadro
A•
Introducción en el panel
Instalar lejos de:
• fuentes de calor
• gases corrosivos
• ambientes polvorientos
°C
PV
AT
SCI
1
X
MAN
SV
REM
°F
W
2
3
RUN
W
MV 4
HLD
SG
Y
W/SV
F
5
model
:
ser
ial n.: :
supply
PID
A/M
QD
SERIES
AMBIENTE:
Temperatura: 0…50 °C
Humedad : 30…85UR%
B•
Fijación con abrazaderas
C•
destornillador
corte en cruz
Placa unidades de ingeniería
si diferente de
°C extraer y
aplicar la placa
con la unidad
requerida
°C
°C
PV
AT
1
SCI
X
PID
MAN
SV
REM
W
°F
2
3
RUN
W
MV 4
HLD
SG
Y
W/SV
F
5
A/M
QF
°F
SERIES
kPa
MPa
mV
Tornillos de
bloqueo
l/m
V
m3/h
mA
Nm3/h
A
CO%
kW
O2%
psi
m
Bar
rh
etiquetas en dotación
2.3
Protección frontal IP67
mod. F10-435-2A101
112,5
135
Inserción abrazaderas
de fijación
Pa
%
HR%
portezuela de
protección
juntas
3
I
3
CONEXIONES ELÉCTRICAS
A•
I
Bloque terminales
24 terminales con tornillo M3.5
6 terminales dorados para señales entrada
I
placa de
protección
conexiones
termómetro de
compensación
junta fría
A1
B1
C1
A2
B2
C2
D2
A3
B3
C3
D3
A4
B4
C4
D4
A5
B5
C5
D5
A6
B6
C6
D6
A7
B7
C7
D7
B8
C8
D8
B•
Efectuar las conexiones
Preferencial
7
Con terminales en ojal
Con terminales en horquilla
Sección cable
0,25÷2,5 mm2
AWG 22÷14
N° hilos 2
N° hilos 2
3.1
máx.
6
max.6
max.66
máx.
Precauciones y recorrido aconsejado
Aunque este regulador haya sido proyectado para resistir a las interferencias
más desfavorables presentes en entornos industriales (según las normas
CE) es conveniente adoptar las siguientes precauciones.
A.
Precauciones
B.
Recorrido aconsejado conductores
Canal para conductores de señales a bajo nivel
Separar la línea
de alimentación
de las líneas de
potencia.
Evitar instalarlo
junto a telerruptores,
contactores electromagnéticos y motores
de gran potencia.
Comunicación
serial A
C
B
B
A
Entradas lógicas
y señales B
analógicas
Salidas C
analógicas
Alimentación D
Evitar instalarlo
junto a grupos de
potencia en especial si
son con control de fase.
4
Salidas E
E
Canal alimentación y salidas
D
C
3
CONEXIONES ELÉCTRICAS
Esquema de conexión
1
A4
6•
4•
3
C2
Y1▼/YB/Y4
B3
C3
B4
C4
Y2
2•
mA/V TC
A7
C5
7•
Y3
2•
9•
D3
D4
C
D5
OUT
24V
B6
INPUT 2
A6
B5
INPUT 1
A5
D2
RS485
A3
3•
W REM
0%
2
B2
6•
Y1C
C6
D6
C7
D7
V
N
D8
L
8•
B7
Y6
B8
C8
POWER
A2
C1
Y1▲/YA/Y5
OUTPUTS
5•
B1
DIGITAL INPUTS
100%
A1
Las salidas con
relé asociadas
con los
terminales
C1/C2 y C2/C3,
si no se
emplean como
salidas de
regulación
pueden
convertirse en
salidas
auxiliares Y4 y/o
Y5.
1•
mA/V TC
1•
Alimentación única
Tipo switching de doble aislamiento
Estándar:
100…240Vac
-15 +10% (250 Vac máx)
o:
24Vac - 24Vdc -15 +10%
Potencia absorbida 5 VA máx
2•
D7
V
N
D8
L
Entradas medida X1 o X2
Nota:
a los terminales "INPUT 1 y INPUT 2" se pueden conectar a elección
entradas incluso de naturaleza diferente, por ejemplo: entrada 1 para termopar
y entrada 2 en mA. (para simplificar la representación se han dibujado iguales)
A•
A6
X1
A7
B7
X2
B8
5
Para Termopares
J-L-T-K-S-R-B-N-E-W
• Respetar la polaridad
• Utilizar, para eventuales
alargamientos de
extensión, el cable de
compensación
correspondiente al tipo de
termopar empleado
• La eventual pantalla se
conecta a una buena
puesta a tierra con una
única extremidad
3
CONEXIONES ELÉCTRICAS
2•
Entradas medida X1 o X2 (sigue)
Nota:
a los terminales "INPUT 1 y INPUT 2" se pueden conectar a elección
entradas incluso de naturaleza diferente, por ejemplo: entrada 1 para termopar
y entrada 2 en mA. (para simplificar la representación se han dibujado iguales)
sólo para conexión con 2 hilos con pernos
para los bornes A5 y A6 y/o B6 y B7.
B
A5
B
A6
B6
B
B7
B
X1
A7
A
X2
B8
A
B•
• Para la conexión con 3 hilos, utilizar cables
de la misma sección (1mm2 mín)
Línea 20Ω máx. por hilo
• Para la conexión con 2 hilos,
utilizar cables de la misma sección
(1,5mm2 mín)
Nota: con una distancia sonda regulador de 15m y con un cable de
sección 1,5mm2 el error es 1°C
aproximadamente
C•
A6
B7
RJ
en continua
Rj interna = 30Ω para mA
Rj interna = 10MΩ para mV
Rj interna = 10KΩ para Volt
mA, mV, V X1 RJ
A7
Para termoresistencia Pt100
X2 mA, mV, V
B8
C.1 •
transmisores
Transmisor de 2 hilos
X1
mA
B5
mA
X2
+24V
A6
alimentación auxiliar
para transmisor
24 Vdc ±10%
60mA máx
X1 RJ
B7
A7
RJ
X2
B8
C.2•
transmisores
Transmisor de 3 o 4 hilos
X1
mA
B5
+24V
A6
X1 RJ
B7
A7
RJ
X2
B8
6
mA
X2
alimentación auxiliar
para transmisor
24 Vdc ±10%
60mA máx
3
CONEXIONES ELÉCTRICAS
3•
Entrada set point remoto
I
En corriente
0/4…20mA
Rj interna = 30Ω
A3
Rj
Set remoto mA, Volt
A4
En tensión
1…5V, 0…5V, 0…10V
Rj interna = 300 KΩ
NO aislada
galvánicamente
4•
Entradas lógicas
Con mando lógico externo ON
(cerrado permanentemente)
la función asociada está
activada.
Con mando lógico externo
OFF (abierto
permanentemente) la función
asociada está desactivada
(véase pág. 19).
C1
B1
C2
B2
C3
B3
B4
Contacto
aislado
mando
com.
5•
Salida
NPN o.c.
Salida
TTL o.c.
Entrada potenciómetro de posición (servomotores)
100%
A1
100%
De 100Ω a 10KΩ máx
pot.h
Carrera
útil
A2
0%
Carrera
total
pot.I
0%
A3
7
3
CONEXIONES ELÉCTRICAS
6.0• Salida individual con relé
6.1•
Salida individual lógica
configurado T=0
I
configurado T=1
contactor o
relé estático
carga
C1
V
carga
D5
Y1▲
Y1C
C2
V
D6
Salida 0…22Vdc ±20% (20mA máx.)
galvánicamente aislada
Un contacto NA
6.2• Salida individual continua
6.3• Salida para servomotores
configurado T=2
configurado T=3
D5
aumenta
carga
Y1C
M
V
D6
C1
Y1▲
C2
disminuye
Y1▼
C3
galvánicamente aislada
500Vac/1min
750Ω/15V máx en corriente
500Ω/20mA máx en tensión
6.4•
con 3 posiciones con 2 contactos NA
interbloqueados (aumenta, stop, disminuye)
Salida de doble acción relé / relé
configurado T=4
carga
calor (o loop A)
V
Y1▲
C2
Y1▼
frío (o loop B)
carga
2 contactos NA
C1
C3
6.5•
Salida de doble acción relé / lógica
configurado T=5
contactor o
relé estático
carga
C1
V
C2
8
D5
Y1▲
calor (o loop A)
Y1C
D6
carga
frío
V
(o loop B)
3
6.6•
CONEXIONES ELÉCTRICAS
Salida de doble acción relé / continua
configurado T=6
carga
C1
V
calor (o loop A)
D5
Y1▲
C2
Y1C
frío
(o loop B)
carga
D6
6.7•
Salida de doble acción lógica / relé
configurado T=7
contactor o
relé estático
carga
C2
V
carga
D5
Y1▼
frío (o loop B)
C3
calor V
(o loop A)
Y1C
D6
6.8•
Salida de doble acción lógica / continua
configurado T=8
contactor o
relé estático
carga
frío
(o loop B)
C7
D5
Y6
calor V
(o loop A)
Y1C
C8
carga
D6
6.9•
Salida de doble acción continua / relé
configurado T=9
V
frío
(o loop B)
carga
C2
D5
Y1▼
C3
6.10•
Y1C
calor
(o loop A)
carga
D6
Salida de doble acción continua / lógica
configurado T= 10
contactor o
relé estático
carga
calor
(o loop A)
C7
Y6
C8
D5
Y1C
carga
frío
V
(o loop B)
D6
9
I
3
6.11•
CONEXIONES ELÉCTRICAS
Salida de doble acción continua / continua
I
configurado T= 11
carga
frío
(o loop B)
C7
Y6
C8
D5
Y1C
calor
(o loop A)
carga
D6
(o loop B)
6.12
Salida de doble acción servomotores / lógica
Loop A
abre
M
V
configurado T= 12
contactor o
relé estático
carga
C1
D5
Loop B V
C2
D6
cierra
C3
6.13
Salida de doble acción servomotores / continua
Loop A
abre
M
V
configurado T= 13
C1
C2
cierra
C3
10
D5
Loop B
D6
carga
3
7• (6•)
CONEXIONES ELÉCTRICAS
Salidas auxiliares Y2-Y3-Y4-Y5
Libremente asociables con Loop A o B
véase pág. 19
carga
2 contactos NA
C4
Y2
V
C5
Y3
carga
C6
carga
C1
Y5
V
C2
Y4
carga
C3
2 contactos NA
Las salidas Y4 y/o Y5 se
encuentran disponibles
únicamente si no han sido
previamente empleadas
como salidas de regulación
con relé
8•
Salida imagen Y6 (opción)
véase pág. 19
C7
carga
Y6
C8
galvánicamente aislada
500Vac/1min
750Ω/15V máx en corriente
500Ω/20mA máx en tensión
9•
Comunicación serial (opción)
D2
Consultar las instrucciones
"SUPLEMENTO
COMUNICACIÓN SERIAL"
D3
D4
común
11
I
4
I
FUNCIÓNDELASTECLASYDELASPANTALLAS
Medida X/PV expresada en
unidades de ingeniería
Si supera el fondo escala
Si desciende por debajo del inicio
escala
En programación visualiza los
valores de los parámetros
Parpadea
con señal en
tránsito
Auto-tune en curso
AT
Com. serial activa
SCI
2° terna PID introducida
PDI
Funcionamiento Manual
MAN
Set Remoto Activo
REM
Set memorizado activo
Normalmente apagado.
Si está encendido se
visualizan algunas mensajes
indicados en la tabla (véase
abajo) que informan sobre
el estado de funcionamiento
del instrumento .
W
Auxiliar
W/SV
Acceso menú Set point
En manual
decrementa
el valor en
salida
En manual
incrementa
el valor de la
salida
Mensaje
1,2,3
a.
b.
MA
sl
E.U
C
yr
yp
12
Selecciona dígito
Incrementa dígito
Tornillo de
extracción
instrumento
Estado del instrumento
Se activa 1 de los 3 Sets points memorizados
Las pantallas principales representan las variables del loop A
Las pantallas principales representan las variables del loop B
Las pantallas principales representan las variables del loop Master (cascada)
Las pantallas principales representan las variables del loop Slave (cascada)
Las pantallas X/PV y W/SV representan las variables X1 y X2 en unidades de ingeniería
Se activa el Set point programado en el PC
1 entrada lógica ha configurado Y1 = entrada Set remoto
1 entrada lógica ha configurado Y1 = valor de forzamiento
I
Aumenta para
servomotores o
Y1 canal calor o
loop A.
°C
Salida Y1 ▲ ON
PV
1
Salida Y1 ▼ ON
X
°F
Selección °F
2
Salida Y2 ON
3
Salida Y3 ON
MV 4
Salida Y4 ON
Y
Salida Y5 ON
SV
W
W
Salida Y1 ON
5
Salida Y1/MV
F
A/M
Set point W/SW
Confirmación
dato o "paso
adelante"
Desactivada con
salida continua o
discontinua doble
acción
Disminuye
para servomotores o
Y1 canal frío
o loop B.
de 0…100%
(de -100.100% para
Y1 doble acción)
o la posición del
servomotor
Set point operante
(Local o Remoto) y en
programación el
código de los
parámetros
Automático/Manual
Acceso menú funciones
Portezuela con placa
de identificación
modelo
13
I
5
I
I
CONFIGURACIÓN
Después de haber completado la instalación y las conexiones eléctricas,
para hacer funcionar este regulador universal, con todas las funciones
previamente instaladas, hay que efectuar en primer lugar la configuración
del instrumento y posteriormente su programación.
5.1•
Acceso a la configuración
Por la enorme importancia de la operación de configuración
para determinar el correcto funcionamiento del regulador, se
aconseja efectuar esta operación con mucho cuidado y
precisión.
Dos son las modalidades a las que se accede para la configuración:
5.1.2•
Instrumento no
configurado
1° configuración
5.1.3•
Instrumento
previamente configurado
Modificación de la configuración
Al encender el aparato se dispone de un
estado de espera (stand-by) manteniendo
las salidas desactivadas.
Permanentemente
en la pantalla
aparece
Si al encender el aparato, la configuración
es reconocida cómo correcta, el
instrumento es inicializado. Durante 5
segundos las salidas se mantienen
desactivadas. Después automáticamente
pasa a ser operativo.
Qnot
Durante 5 seg, en la
pantalla aparece el
código de identificación
instrumento (parámetro
Tag)
ZConf.
Este proceso no está
temporizado
Q0036
ZtaGS
Funcionamiento
normal
X
NO
SI
Zs.p.t.S
OK
X
Ztune
>
ZtaGS
X
Q3333L
Zpar.S
>
<+
ZC.Con.
Introducción
contraseña
ZpAss.
X
ZConf.
>
X
ZAddr.S
>
X
ZC.u.y6
<+
>
Introducción y/o modificación del índice y/o
del valor del parámetro seleccionado (dígito
parpadeante en la pantalla X/PV).
ZEndS
>
14
X
Directamente al V° grupo de parámetros.
5
A•
Extraer el instrumento
CONFIGURACIÓN
B•
Desenganchar soporte papel
°C
PV
SCI
1
X
PID
MAN
SV
REM
W
model
:
ser
ial n.: :
supply
I
SC
I
P ID
MA
N
RE
°C
M
PV
°F
2
RU
N
3
HL
RUN
W
MV 4
HLD
SG
Y
X
S V °F
W 2
W
5
W/S
V
SG
MV
W/SV
F
1
D
Y
A/M
3
4
5
F
A/
M
Soporte
Abrir la portezuela
Desenroscar para
extraerlo
C•
Separar el folio
Levantar el soporte, desenganchar
y extraer el folio
D•
Rellenar tabla
Abrir el folio
e
td
ne
ar
C
Carnet de identidad
ad
tid
en
id
Plegar de nuevo el folio
y unirlo al soporte
E•
Colocar de nuevo el folio
F•
Cierre
°C
PV
SCI
1
X
PID
MAN
SV
REM
W
model
:
ser
ial n.: :
supply
Encajar el
soporte en
los 3 pernos
°F
2
3
SC
RUN
W
MV 4
HLD
SG
Y
I
5
P ID
MA
N
RE
°C
M
F
A/M
PV
RU
N
HL
W/SV
X
1
D
S V °F
W
W/S
V
W
SG
MV
Y
2
3
4
5
F
A/
M
Introducir el folio
Encajar y enroscar
para bloquear el
instrumento
15
FUNCIONES DE LAS TECLAS Y DE LAS PANTALLAS
Medida
en funcionamiento
I
Valor del dato
en programación
°C
PV
AT
1
SCI
X
PID
MAN
SV
REM
W
°F
2
3
Set Point
en funcionamiento
normal
MV 4
Y
5
W
W/SV
F
A/M
Código mnemónico
en programación
QD
SERIES
Confirmación
dato o "paso
adelante"
Funcionamiento
normal
>
Visualización
Set-Point de
target
>
Lanzamiento
Auto-Tune
>
Acceso a los
parámetros
>
Acceso a la
configuración
>
Visualización
dirección SCI
Automático/
Manual
Acceso menú
funciones
Incrementa dígito
Selecciona dígito
Acceso menú
Set point
Notas sobre la tabla de los parámetros representada en la página 17
Atención: la programación de un índice no admitido o en cualquier caso no coherente
con las elecciones precedentes, no es aceptada
En la pantalla X/PV aparece
cuando el índice programado supera el límite admitido
En la pantalla X/PV aparece
cuando el índice programado es inferior al límite admitido
Para identificar inmediatamente y/o modificar posteriormente las características de
funcionamiento del regulador, con la configuración realizada, resulta muy útil indicar también
los datos introducidos en esta tabla en el carnet de identidad específico situado en el
interior del regulador (véase página 15).
16
5
5.2
CONFIGURACIÓN
Selección e introducción de parámetros de configuración
proceso no temporizado
Antes de introducir los índices o los valores numéricos de los
parámetros de configuración contenidos en las tablas informativas
en la pág. 18 y 19 aconsejamos rellenar con mucha atención la tabla
abajo representada, escribiendo previamente en el específico espacio
reservado los índices elegidos.
Es muy importante introducir los datos progresivamente sin saltarse
ninguno de ellos.
Una vez entrados en la configuración se presenta el
1° parámetro. Al pulsar la tecla > todos los
parámetros se presentan en sucesión según se indica
en la siguiente tabla.
QConf.
>
>
>
Cód. mnem.
Parámetro
(pantalla W/SV)
QtaGS
QC.Con.
QC.Ss.p.
QC.In.1
QC. sc.
QC. C.j.
QC. d.d.
QC. Io.
QC. hi.
QC.In.2
QC.sc.2
QC.C.j.2
QC.d.d.2
QC.Io.2
QC.hi.2
QC.l.i.I
QC.l.i.2
QC.l.i.3
QC.In.r.
QC. y1
QC.u.y1
QC. y2
QC. y3
QC. y4
QC. y5
QC. y6
QC.u.y6
QEnd
descripción
parámetro
Índice y/o valor a
introducir
Pantalla X/PV
Ref.
Código identificación regulador
Algoritmo y acción de regulación
Tipo de Set Point
Tipo entrada X1 y campo escala
Selección °C, °F y K para entrada X1
Temp. Junta fría externa entrada X1
Núm. de decimales para escalas lineales entrada X1
Valor inicio escala para escalas lineales entrada X1
Valor fondo escala para escalas lineales entrada X1
Tipo entrada X2 y campo escala
Selección °C, °F y K para entrada X2
Temp. junta fría externa entrada X2
Núm. de decimales para escalas lineales entrada X2
Valor inicio escala para escalas lineales entrada X2
Valor fondo escala para escalas lineales entrada X2
Función Entrada Lógica 1
Función Entrada Lógica 2
Función Entrada Lógica 3
Campo entrada Set point Remoto
Salida de regulación Y1
Campo de la salida Y1
Tipo de intervención alarma Y2
Tipo de intervención alarma Y3
Tipo de intervención alarma Y4
Tipo de intervención alarma Y5
2° salida continua Y6 (retransmisión)
Campo de la salida Y6
Fin configuración
X Se accede directamente al V° grupo de parámetros
A
B
C
D
E
F
G
H
K
I
J
L
M
N
O
P
Q
R
S
T
U
V
W
X
Y
Z
*
El fondo gris identifica los parámetros que aparecen condicionados
por elecciones previas (Véanse las notas indicadas bajo las tablas de
los parámetros en las pág. 18 y 19).
17
5
ZtaGS
ZC.In.1 ZC.In.2
Código de identificación A
Campo admitido 0000.. 9999
Permite asociar un número
(configurado libremente) a la
especificación que el cliente
considera útil.
Durante el encendido, con
regulador previamente
configurado, este número
aparece en la pantalla X/PV
durante 5 segundos.
Tipo de entrada y campo escala
D-I
para entradas X1 y X2
-200…600°C
-328…1112°F 0
73…873 K
Termoresistencia
-99.9…300.0°C
Pt100 Ω
-99.9…572.0°F 1
IEC 751
173.3…573.2 K
0…600°C
Termopar J
2
32…1112°F
FeCu45%Ni
273…873K
IEC584
0…600°C
Termopar L
3
32…1112°F
FeConst.
273…873 K
DIN 43710
-200…400°C
Termopar T
4
-328…752°F
Cu CuNi
73…673 K
IEC 584
0…1200°C
Termopar K
5
32…2192°F
Cromel-Alumel
273…1473 K
IEC 584
0…1600°C
Termopar S
6
32…2912°F
Pt10%Rh-Pt
273…1873
IEC 584
K0…1600°C
Termopar R
7
32…2912°F
Pt13%Rh-Pt
273…1873 K
IEC 584
400…1800°C
Termopar B
Pt30% Rh-Pt6%Rh 752…3272°F 8
673…2073 K
IEC 584
0…1200°C
Termopar N
9
32…2192°F
Nicrosil-Nisil
273…1473 K
IEC 584
0…1100°C
Termopar E
10
32…2012°F
Ni-NiMo18%
273…1373 K
IEC 584
0…2000°C
Termopar W
11
W3%Re-W25%Re 32…3632°F
273…2273 K
IEC 584
12
4…20 mA
13
0…20 mA
14
0…50 mV
Escalas lineales 15
0…200 mV
configurables 16
0…1 V
17
1…5 V
18
0…5 V
19
0…10 V
20
4…20 mA
Escalas lineales 21
0…20 mA
configurables 22
0…50 mV
con extracción 23
0…200 mV
24
de raiz
0…1 V
25
cuadrada
1…5 V
26
0…5 V
27
0…10 V
ZC.Con.
Algoritmo y
acción de regulación
Inversa
On - Off
Directa
Inversa
P.I.D.
Directa
Inversa
P.I.D.
doble
Directa
Inv. / Inv.
P.I.D.
Dir. / Inv.
cascada Inv. / Dir.
Dir. / Dir.
Inv. / Inv.
P.I.D.
Dir. / Inv.
cascada Inv. / Dir.
doble
Dir. / Dir.
P.I.D.
Inversa
relación dir. Directa
Inversa
P.I.D.
relación inv. Directa
Inv. / Inv.
Dir. / Inv.
P.I.D.
2 Loops Inv. / Dir.
Dir. / Dir.
B
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Para introducir y/o
modificar el índice o el
valor del parámetro
seleccionado pulsar las
teclas:
< +
Selecciona
dígito
Incrementa
dígito
ZC. 5.p.
Tipo de Set point
Sólo Local
Local y 3 memorizados
Sólo Remoto
Local y Remoto
Local y Local + Remoto
18
C
0
1
2
3
4
CONFIGURACIÓN
C
Z . 5c. C
Z 5
. c.2
Selección en °C, °F, K
y compensación
E
junta fría para
J
entradas X1 y X2
°C 0
Compensación
°F 1
interna
K 2
°C 3
Compensación
°F 4
externa
K 5
Parámetro no presente con
entrada Pt100 o lineal.
Con compensación externa, el
valor de la temperatura de la
junta fría se configura mediante
el parámetro
(Tab. F-L)
ZC. d.d. ZC.d.d.2
Número de decimales
G
para escalas lineales
M
para entradas X1 y X2
0
Ningún decimal
1 cifra decimal
1
2 cifras decimales
2
3 cifras decimales
3
Parámetro no presente para
entrada en sensor termométrico.
Notas entradas lógicas
ZC.l.i.1 ZC.l.i.2 ZC.l.i.3
C
Z 1
. n.r.
Campo entrada
S
Set Remoto
0
En corriente 4…20 mA
1
0…20 mA
2
1…5 V
En tensión 0…5 V
3
4
0…10 V
Se presenta solamente si se ha
seleccionado el Set Remoto (Tab. C)
índ. 2,3,4
C
Z . y1
Sencilla
Salida de regulación Y1
Y1(ch.▲) Y1(ch.▼) T
Relé
0
Lógica
1
Continua
2
Servomotores
3
Relé
Relé
4
Relé
Lógica
5
Relé
Continua 6
Lógica
Relé
7
Continua 8
Lógica
Relé
Continua
9
Lógica
10
Continua
Continua 11
Continua
12
Servomotores Lógica
Servomotores Continua 13
Los índices 8,10,11, pueden configurarse
solamente si se encuentra presente la opción
2 salida continua Y6. Este parámetro está
condicionado por la selección anterior:
algoritmo y acción de regulación (Tab. B)
si tipo de regulación Configurar
(Tab. B)
(Tab.T)
ZC. Io. ZC.Io.2
H
N
ZCShi. ZChi2
Valor fondo escala
K
para escalas lineales
O
para entrada X1 y X2
=999…C.1o. -100 o
C.1o+100…9999
Campo mínimo 100 digits
On - Off
P.I.D. sencillo
P.I.D. doble salida
0…1
2…3
4…11
ZC.u.y.1
Campo salida Y1
4…20 mA
En corriente
0…20 mA
1…5 V
En tensión 0…5 V
0…10 V
U
0
1
2
3
4
Se presenta solamente si ha sido
seleccionada Y1 continua. Tab. T Índ. 2, 6, 9,11
ZC. y2 ZC. y3
ZC. y4 C
Z . y5
Intervención Alarmas V-W
Y2-Y3-Y4-Y5
X-Y
0
Desactivada
Interrupción N.A.(se cierra) 1
entrada X1 (1) N.C. (se abre) 2
3
Independiente Activa alta
loop A
Activa baja 4
5
Desviación
Activa alta
loop A
Activa baja 6
Banda
Activa fuera 7
loop A
Activa dentro 8
Salida Y1
Activo alta 9
loop A
Activa baja 10
11
Interrupción N.A.
12
entrada X2.(1) N.C.
Independiente Activa alta 13
loop B
Activa baja 14
Desviación
Activa alta 15
loop B
Activa baja 16
Banda
Activa fuera 17
loop B
Activa dentro 18
Salida Y1
Activa alta 19
loop B
Activa baja 20
Activa alta 21
Relación
Activa baja 22
(1) solamente para termoelementos,
4…20mA, 1…5V
Y4 y/o Y5 no se presentan si la salida
de regulación ha sido previamente
utilizada como salida sencilla o
doble, con relé o para servomotores.
Tab. T Índ. 0, 3, 4, 5, 6,7, 9,12,13
ZC. y6
OPCIÓN
2° salida continua Y6
Z
0
Desactivada
1
Medida X1
2
Set point W
3
Salida Y1
4
Salida Y1(canal ▼)
5
Desviación 0…25%
6
Medida X2
No se presenta si la salida de
regulación es doble e Y1 (canal ▼)
ha sido seleccionada como continua
o lógica. Tab. T, Índ. 8,10,11
Retransmisión
ZC. C.j. C
Z C
. j
. 2
.
Temp. junta fría externa F
para entrada X1 y X2
L
0 …. 50°C
Campo
32 …. 122°F
admitido
273 …. 323 K
Introducir un valor comprendido
en el campo escala admitido.
Parámetro no presente con
compensación interna.
Valor inicio escala
para escalas lineales
para entradas X1 y X2
-999…9999
(véase notas al lado)
Doble
A cada entrada lógica se puede
asociar libremente una función
(véase tab. P.Q.R). Con mando
lógico externo ON (cerrado
permanentemente) la función
seleccionada está activada. Por el
contrario con mando lógico externo
OFF (abierto permanentemente) la
función se desactiva.
La imposición de cualquier
función, activada mediante el
mando lógico ON, es
prioritaria respecto al mando
desde teclado o vía
comunicación serial.
1e11 con mando OFF regresa en
Automático
2,3,4 Con más de un mando lógico
invoca al mismo tiempo 1
de los 3 Set points
memorizados, permanece
activado el último
accionado.
5
Con mando OFF regresa en
Local
6
Con mando OFF regresa en
Remoto
7
Con mando OFF el teclado
vuelve a ser operativo.
Con teclado bloqueado,
permanecen operativos
otros eventuales mandos
lógicos y la comunicación
serial.
Los índices 2,3,4,5,6,9 están
condicionados por la selección
anterior:
Tipo de Set point (Tab. C)
Función asociada
P-Q
a las 3 entradas lógicas R
0
Ninguna
Imposición en manual loop A 1
Invocación 1° set memorizado 2
Invocación 2° set memorizado 3
Invocación 3° set memorizado 4
5
Imposición set remoto
6
Imposición set local
7
Bloqueo teclado
Imposición 2° terna P.I.D 8
Y1 = entrada Set remoto 9
Y1 = Valor de forzamiento 10
Imposición en manual loop B 11
ZC.u.y6
Campo salida Y6
*
0
4…20 mA
En corriente
1
0…20 mA
2
1…5 V
3
En tensión
0…5 V
4
0…10 V
Presente si C. y6 no está desactivada
o si la salida de regulación es doble e
Y1 (canal ▼) ha sido seleccionada
como continua o lógica.
Tab. Z - Índ. 1,2,3,4 o
Tab. T - Índ. 8,10,11
19
6
PROCESO DE PROGRAMACIÓN
Después de haber completado la configuración del instrumento se debe
pasar a efectuar la parametrización de éste.
6.1•
Menú principal
Desde el menú principal se accede a todas las funciones del regulador:
lanzamiento auto-Tune, parametrización, configuración
En funcionamiento normal, al pulsar en sucesión la tecla X, se presentan
en secuencia las funciones del menú principal.
Funcionamiento
normal
X
Zs.p.t.S
Visualización
Set-Point de target
aparece sólo con
"slopes" diferentes
de "0"
>
Lanzamiento
Auto-Tune
Capítulo 7.6,
véase folio operador
(aparece sólo si habilitado)
>
Acceso a los
parámetros
(Capítulo 6.2,
I-II-III-IV -V grupo de
parámetros,
véase pág. 21,22,23)
>
Acceso a la
configuración
(Capítulo 5,
véase pág. 14)
>
Visualización
dirección SCI
(Aparece solamente con la
opción comunicación serial
presente)
>
X
Ztune
X
Zpar.S
X
ZConf.
X
ZAddr.
X
6.2•
Acceso a los parámetros
En funcionamiento normal, pulsar la tecla X hasta que aparezca
Pulsar > para acceder al 1° parámetro del 1° grupo. Qs.p.SI
Qpar.S.
Los parámetros están subdivididos en 4 grupos homogéneos, al pulsar la
tecla > se pasa al parámetro siguiente (en el interior del mismo grupo),
pulsando sin embargo la tecla X se pasa al grupo siguiente de parámetros.
El acceso al V grupo de parámetros está protegido con una "contraseña",
cuando aparece QpAss. introducir el código de acceso Q1111
20
6.3
Parametrización
Este proceso ha sido temporizado.
Si no se pulsan las teclas durante
30 segundos aproximadamente, se
regresa al funcionamiento normal.
PRIMER GRUPO
Qpar.
>
X
Acceso a los
parámetros
PS300
Zy2s.p.
PSS10
Zs.p.S1
>
PSS20
Zs.p.S2
>
PSS30
Zs.p.S3
>
1° Set point memorizado
(1)
>
PS0:50
Histéresis Y2 (4)
0.01…10.00% c.s.
Zy2Hy.
2° Set point memorizado
(1)
>
PS300
Zy35.p.
3° Set point memorizado
(1)
>
Set point Y3 (3)
PS0:50
Histéresis Y3 (4)
0.01…10.00% c.s.
Zy3Hy.
PSS0:0 Rampa en subida
del Set point(2)
0.0…10.0% c.s.
0.1 digit/min.
P S0:0 Rampa en bajar
S
del Set point(2)
0.0…10.0% c.s.
0.1 digit/min.
ZsI. u.
>
Set point Y2 (3)
>
PS300
Zy4s.p.
ZsI. d.
>
Set point Y4 (3)
PS0:50
Histéresis Y4 (4)
0.01…10.00% c.s.
Zy4Hy.
>
>
PS300
Zy55.p.
>
Set point Y5 (3)
PS0:50
Histéresis Y5 (4)
0.01…10.00% c.s.
Zy5Hy.
>
Esquema en bloques 1 Loop estándar con salida individual o doble
Set point
W Local
Qp.b.
Qt.i.
Qt.d.
LOC
EXT
REM
1°
2° Set PID
Salida individual
Qp.b. 2
Qt.i. 2
Qt.d. 2
Qsp. 1
Qsp. 2
Qsp. 3
Qyh.
Y1
S.P. memoriz.
W Remoto
QyI.
Qr.c.r.
Qsp.l.h.
X1
Qsp.l.1.
Salida doble
QsI. u.
WT
QsI. d.
PID+F
X1
Qyh.
Qy.5I.u.
W1
Y
Y1▲
(calor)
Y
Qy.5I.d.
< +
A
M
Qd.b.
Qyh. C.
Y1▼
(frío)
En el regulador QD de doble acción (ej. Calor /frío) la salida del algoritmo P.I.D. es
compartida en las salidas diferentes Calor y Frío. Además junto al P.I..D estándar se
encuentran presentes el parámetro r.c.r que determina la relación entre la Banda
proporcional por acción frío y la banda por acción calor y el parámetro d.b. que
configura la zona muerta en la transición entre acción Calor y acción Frío. Además,
el valor máximo de las 2 salidas está limitado por los parámetros yh. y yh. C
respectivamente para el calor y para el Frío.
21
6
PROCESO DE PROGRAMACIÓN
SEGUNDO GRUPO
X
Para conseguir un uso más inmediato de
los parámetros del 2° grupo, éstos se
representan en función del algoritmo de
regulación anteriormente seleccionado.
Algoritmo de regulación PID
(configurado como B=2_3_4_5)
>
Algoritmo de regulación PID sólo para salida
servomotores (configurado como B=2_3 e T=3)
PSS5:0 Banda proporcional
0.5...999.9% c.s.
>
Zp.b.
>
Zp.b.
PSS1:0 Tiempo integral
(excluible con 0,0)
0.0...100.0 minutos
>
PS0:20 Tiempo derivativo
(excluible con 0,00)
0.00...10.00 minutos
>
PSS50 Realineación salida
>
Zt.i.
>
Zr.y.
>
PS50:0 Fuzzy intensity
(excluible con 0,0)
0.0…90.0%
>
PSS30 Tiempo de ciclo Y1
>
Zt.c.
>
Zt.c.SC.
>
>
Zpot.1
1…200 segundos
Y
Zr.c.r.
Zpot.1
Y
>
Algoritmo de regulación On - Off
(configurado como B= 0_1)
Y
ZHy.
>
22
>
Con la válvula parada, la
tecla A/M introduce el
valor de inicio escala (0)
La válvula se sitúa en el
fin de carrera superior
Zpot.h
>
PS0:50 Histéresis (On- Off)
0.10...10.00%span
Calibrado de la válvula
La válvula se sitúa en el
fin de carrera inferior
>
PSS1:0 Ganancia relativa del
frío (5)
0.1…3.0
>
PSS1:0 Mínima resolución salida
0.1…10.0% salida
>
(sólo para Relé o lógica)
Zd.b.
PSS60 Tiempo carrera del
servomotor
15…600 segundos
Zdy.
1…200 segundos
PSS1:0 Zona muerta (5)
0.0…5.0% salida
PSS50 Fuzzy intensity
(excluible con 0,0)
0.0...90.0%
Zt.y.
(sólo para Relé o lógica)
PSS30 Tiempo de ciclo Y1▼ (5)
PS0:00 Tiempo derivativo
(excluible con 0,00)
0.00...10.00 minutos
Zf.Int.
Zf.Int.
>
PSS1:0 Tiempo integral
(excluible con 0.0)
0.0...100.0 minutos
Zt.d.S
(presente sólo con t.i excluida)
0...100% o
-100...100% para doble salida
Banda proporcional
0.5...999.9% c.s.
Zt.i.
Zt.d.S
>
PSS5:0
Con la válvula parada, la
tecla A/M introduce el valor
de fondo escala (100)
6
1 LOOP ESTÁNDAR
TERCER GRUPO
CUARTO GRUPO
X
>
PSS5:0
Zp.b. 2
>
X
>
Banda proporcional (6)
0.5...999.9% c.s.
Zf.Er.r.
>
PSS1:0 Tiempo integral (6)
(excluible con 0,0)
0.0...100.0 minutos
Zt.i. 2
>
>
PS0:20 Tiempo derivativo (6)
(excluible con 0,00)
0.00...10.00 minutos
PSS50
Zr.y. 2
>
PSSS3
Zt.san.
>
Realineación salida (6)
(presente sólo con t.i2 excluida)
0...100% o
-100...100% para doble salida
P 1:0 Ganacia relativa del
S
frío (5)
0.1…3.0
Zr.c.r.2
>
PSSS0
Zt.fiI.
>
PSSS0
ZysI.u.
>
I
% campo fuzzy (6)
0.5…999.9% c.s.
P1O:00
Zf.der.
Zt.d. 2S
>
PS20:0
Derivada Fuzzy (6)
0.10…99.99% c.s./min
Tiempo de muestreo
0…30 seg
(con 0 = 0,5seg)
Constante de tiempo del
filtro entrada (excluible con 0)
0…30 seg
Máx velocidad de
aumento de Y1(7)
(excluible con 0) 0…20 %/seg
PSSS0 Máx velocidad de
disminución de Y1(7)
(excluible con 0) 0…20 %/seg
ZysI.d.
>
Notas
1 Los 3 Sets points memorizados se presentan
solamente si el tipo de set point ha sido
configurado como local y con 3 memorizados
(véase la pág. 18).
Se pueden configurar en todo el campo escala,
pero están condicionados por eventuales límites
del set point introducidos en el 5° grupo.
5 Solamente para salida de doble acción.
2 Con 0,0 la rampa se excluye, la variación del Set
point es escalonada.
El campo de configuración máximo equivale al
10% del campo escala expresado en digit. Ejemplo:
Escala:
-200…600°C
Amplitud escala:
800°C
Máx valor configurable:
80,0 digit/min
Correspondiente a:
80,0°C/min
7 Parámetros no presentes para algoritmo On-Off o
para servomotores.
3 No se encuentra presente si “Intervención alarmas”
Y2,Y3,Y4 o Y5 está configurada como desactivada
o por interrupción entrada.
V-W-X-Y = 0,1,2 (véase pág.19)
El campo de configuración del set point de Y2 e
Y3 varía en función de la configuración :
• Independiente:
en toda la escala
• Desviación:
-300…+300
• Banda:
0…300
6 Parámetros no presentes con algoritmo On-Off.
Los parámetros del 3° grupo se presentan
solamente si 1 de las 3 entradas lógicas está
configurada como “Imposición 2° terna P.ID.
(Código 8)
8 Índice de acceso a los parámetros.
Cada dígito define el acceso a los parámetros para
cada grupo.
1° grupo
Q2222
ZA.par
2° grupo
3° grupo
4° grupo
Índices de acceso
Visibles y modificables 2
Visibles pero NO MODIFICABLES 1
NO VISIBLES 0
9 Presente solamente si 1 de las 3 entradas lógicas
está configurada como “Imposición de Y1 = valor
de forzamiento (Código10)
4 No se encuentra presente si “Intervención alarmas”
Y2,Y3,Y4 o Y5 está configurada como desactivada
o por interrupción entrada.
V-W-X-Y = 0,1,2 (véase pág.19)
23
I
QUINTO GRUPO
I
I
ZpAss.
contraseña de acceso
(véase pág. 20)
>
NON
Regreso en función normal
OK
OUI
SÍ
directamente desde la configuración
P2222
ZA.par.
>
PSSS1
ZA.tu.
>
PSSS9
ZsCIS
>
PSSS1
ZAddr.
>
PIN.SCALA
Zs.p.l.I.
>
PF. SCALA
Zs.p.l.h.
>
PSSS0
ZyI..SS
Código habilitación Tune
0 No habilitado
1 Tune habilitado
>
Habilitación e índices
comunicación serial
>
>
(si presente)
Límite inferior Set point
Inicio escala…s.p.l.h
Límite superior Set point
s.p.l.I…fondo escala
>
>
>
Protocolo
—
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
PSSS0
PSSS0
Zsa.y3
Condiciones
Inhabilitada
PSSS0
Zsa.y4
>
Sólo
Lectura
PSSS0
Zsa.y2
>
Baud
—
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
0
Zsa.yI
PS1:00 Relación (Ratio) del
Set point Remoto (si habilitado)
-9.99…10.00
>
PS
ZyIpr.
Zs.p.r.r.
Índice
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
PSSS0
ZIn.sh.
1…247
>
Zs.p.r.b.
PS100
Zyh. C.
(si presente) (véase la tabla)
Dirección com. serial
PS100
Zyh.SS
Polarización (Bias) del
Set point Remoto (si habilitado)
-100…200 % c.s.
PSSS0
>
Índice de acceso a los
parámetros (8)
0000…2222
PSSS0
Zsa.y5
Mínimo valor Y1 (No presente si
On-Off, para servomotores y con salida
doble) 0…90% salida
Máximo valor Y1
(No presente si On-Off o para servomotores)
10…100% salida
Máximo valor Y1▼
(sólo para salida doble)
10…100% salida
Input shift
-60…60 digit
Valor forzamiento Y1(9)
0…100% salida
(-100…100% salida doble)
Valor seguridad Y1
0…100% salida
(-100…100% salida doble)
Índice
SeguridadY2 0 = No Habilitada
1 = Cont. abierto
En alarma 2 = Cont. cerrado
Índice
SeguridadY3 0 = No Habilitada
En alarma 1 = Cont. abierto
2 = Cont. cerrado
Índice
Seguridad Y4 0 = No Habilitada
1 = Cont. abierto
En alarma 2 = Cont. cerrado
Índice
SeguridadY5 0 = No Habilitada
En alarma 1 = Cont. abierto
2 = Cont. cerrado
{
{
{
{
>
Lectura y
escritura
Modo
local o
supervisor
24
6.3
Parametrización
Este proceso ha sido temporizado.
Si no se pulsan las teclas durante
30 segundos aproximadamente, se
regresa al funcionamiento normal.
PRIMER GRUPO
Qpar.
X
Acceso a los
parámetros
>
PS300
Zy2s.p.
PSS10
Zs.p.S1
>
PSS20
Zs.p.S2
>
PSS30
Zs.p.S3
>
1° Set point memorizado
(1)
2° Set point memorizado
(1)
3° Set point memorizado
(1)
PS0:50
Zy2Hy.
>
ZsI. u.
Zy35.p.
>
Histéresis Y3 (4)
0.01…10.00% c.s.
PS300
Zy4s.p.
>
Set point Y4 (3)
PS0:50
Zy4Hy.
>
Set point Y3 (3)
PS0:50
>
ZsI. d.
Histéresis Y2 (4)
0.01…10.00% c.s.
PS300
Zy3Hy.
PSS0:0 Rampa en subida
del Set point(2)
0.0…10.0% c.s.
0.1 digit/min.
P S0:0 Rampa en bajada
S
del Set point(2)
0.0…10.0% c.s.
0.1 digit/min.
>
>
Set point Y2 (3)
>
Histéresis Y4 (4)
0.01…10.00% c.s.
PS300
Zy55.p.
>
Set point Y5 (3)
PS0:50
Zy5Hy.
Histéresis Y5 (4)
0.01…10.00% c.s.
>
Esquema en bloques 1 Loop en cascada
Set point
LOC
REM
W Local
Qp.b.
Qt.i.
Qt.d.
1°
2° Set PID
SLAVE
salida individual
Qp.b. 2
Qt.i. 2
Qt.d. 2
Qsp. 1
Qsp. 2
Qsp. 3
Qyh.
Y1
S.P. memoriz.
W Remoto
QyI.
Qsp.l.h.
Qs.p.s.r.
QsI. u.
WT
Qsp.l.1.
Qr.c.r.
Qs.p.s.b.
Qsp.h.5.
W2 Slave
W1 Master
QsI. d.
PID+F
Y
Qsp.I.5.
X1
X1
X2
< +
SLAVE
salida doble
PID
X2
A Master
M
Qyh.
Qy.5I.u.
Y
Qy.5I.d.
Y
Y1▲
(heat)
calor
< +
A Slave
M
Qd.b.
Qyh. C.
Y1▼
(cool)
frío
En el regulador QD la salida del regulador Master Y no es aplicada directamente como
Set Point al regulador Slave sino que es manipulada como un elemento escalado según
la expresión W2=Y• s.p.5.r. + s.p.5.b.. El set point del Slave se encuentra además limitado
por el campo s.p.I.5. … s.p.h.5.. Una señal Blk bloquea la acción I en el regulador Master si
la salida del Slave se encuentra en saturación o el mismo Slave se encuentra en Manual.
El Set point del Slave, que no es normalmente modificable, al ser producido por la salida
del Master, puede ser asignado sólo si el master se encuentra en Manual.
25
6
PROCESO DE PROGRAMACIÓN
SEGUNDO GRUPO
X
Para conseguir un uso más immediato de los parámetros
del 2° grupo, éstos se representan en función del algoritmo
de regulación anteriormente seleccionado.
Algoritmo de regulación PID
(config. como B= 6_7_8_9_10_11_12_13)
>
PSS5:0
Zp.b.
>
Algoritmo de regulación PID sólo para salida
servomotores (config. como B= 6_7_8_9 e T=3)
>
Banda proporcional
Master
0.5...999.9% c.s.
Zp.b.
PSS1:0 Tiempo integral Master
(excluible con 0,0)
0.0...100.0 minutos
>
PS0:20 Tiempo derivativo Master
(excluible con 0,00)
0.00...10.00 minutos
>
PSS50 Realineación salida Master
(presente sólo con t.i excluida)
0...100%
>
Zt.i.
>
>
Zp.b. 5.
Banda proporcional Slave
0.5...999.9% c.s.
PSS1:0 Tiempo integral Slave
(excluible con 0,0)
0.0...100.0 minutos
>
PS0:20 Tiempo derivativo Slave
(excluible con 0,00)
0.00...10.00 minutos
>
P S50 Realineación salida Slave
S
(presente sólo con t.i excluida)
0...100% o
-100...100% para doble salida
>
PS50:0 Fuzzy intensity Master
(excluible con 0,0)
0.0…90.0%
PSS30 Tiempo de ciclo Y1 Slave
Zt.c.
>
>
>
PSS1:0 Zona muerta Slave (5)
0.0…5.0% salida
Zd.b.
>
PSS1:0 Ganancia relativa del frío
Slave (5)
0.1…3.0
Zr.c.r.
>
26
>
Zpot.1
1…200 segundos
Zt.c.SC.
PSS1:0 Mínima resolución salida
0.1…10.0% salida
Zdy.
(sólo para Relé o lógica)
PSS30 Tiempo de ciclo Y1▼
Slave (5) (sólo para Relé o lógica)
1…200 segundos
PSS60 Tiempo carrera del
servomotor
15…600 segundos
Zt.y.
Zf.Int.
>
PSS50 Fuzzy intensity Master
(excluible con 0,0)
0.0...90.0%
Zf.Int.
Zr.y. 5.
>
PS0:20 Tiempo derivativo Slave
(excluible con 0,00)
0.00...10.00 minutos
Zt.d. 5.
Zt.d. 5.
>
PSS1:0 Tiempo integral Slave
(excluible con 0,0)
0.0...100.0 minutos
Zt.i. 5.
Zt.i. 5.
>
PSS5:0 Banda proporcional Slave
0.5...999.9% c.s.
>
PSS5:0
Zp.b. 5.
PS0:00 Tiempo derivativo Master
(excluible con 0,00)
0.00...10.00 minutos
Zt.d.S
Zr.y.
>
PSS1:0 Tiempo integral Master
(excluible con 0.0)
0.0...100.0 minutos
Zt.i.
Zt.d.S
>
PSS5:0 Banda proporcional
Master
0.5...999.9% c.s.
>
Calibrado de la válvula
La válvula se sitúa en el
fin de carrera inferior
Y
Zpot.1
Y
>
Zpot.h
Y
>
Con la válvula parada, la
tecla A/M introduce el
valorde inicio escala (0)
La válvula se situa en el
fin de carrera superior
Con la válvula parada, la
tecla A/M introduce el valor
de fondo escala (100)
6
1 LOOP - CASCADA
TERCER GRUPO
CUARTO GRUPO
X
>
PSS5:0
Zp.b. 2
>
X
>
Banda proporcional (6)
0.5...999.9% c.s.
Zf.Err.
>
PSS1:0 Tiempo integral (6)
(excluible con 0,0)
0.0...100.0 minutos
>
PS0:20 Tiempo derivativo (6)
(excluible con 0,00)
0.00...10.00 minutos
>
PSS50
Zr.y. 2
PSSS3
Zt.san.
Zt.d. 2S
>
Realineación salida (6)
(presente sólo con t.i excluida)
PSSS0
Zt.fiI.
0...100%
>
>
PSSS0
Zt.fi.2
>
PSSS0
ZysI.u.
>
I
% campo fuzzy (6)
0.5…999.9% c.s.
P1O:00
Zf.der.
Zt.i. 2
>
PS20:0
Derivada Fuzzy (6)
0.10…99.99% c.s./min
Tiempo de muestreo
0…30 seg
(con 0 = 0,5seg)
Constante de tiempo del
filtro entrada X1
(excluible con 0)
0…30 seg
Constante de tiempo del
filtro entrada X2
(excluible con 0)
0…30 seg
Máx velocidad de
aumento de Y1(7)
(excluible con 0) 0…20 %/seg
PSSS0 Máx velocidad de
disminución de Y1(7)
(excluible con 0) 0…20 %/seg
ZysI.d.
>
Notas
1 Los 3 Sets points memorizados se presentan
solamente si el tipo de set point ha sido
configurado como local y con 3 memorizados
(véase la pág. 18). Se pueden configurar en todo
el campo escala, pero están condicionados por
eventuales límites del set point introducidos en el
5° grupo.
2 Con 0,0 la rampa se excluye, la variación del Set
point es escalonada. El campo de configuración
máximo equivale al 10% del campo escala
expresado en digit. Ejemplo:
Escala:
-200…600°C
Amplitud escala:
800°C
Máx valor configurable:
80,0 digit/min
Correspondiente a:
80,0°C/min
3 No se encuentra presente si “Intervención
alarmas” Y2,Y3,Y4 o Y5 está configurada como
desactivada o por interrupción entrada.
V-W-X-Y = 0,1,2 (véase pág.19).
El campo de configuración del set point de Y2 e
Y3 varía en función de la configuración:
• Independiente:
en toda la escala
• Desviación:
-300…+300
• Banda:
0…300
4 No se encuentra presente si “Intervención alarmas”
Y2,Y3,Y4 o Y5 está configurada como desactivada
o por interrupción entrada.
V-W-X-Y = 0,1,2 (véase pág.19)
5 Solamente para salida de doble acción.
6 Parámetros no presentes con algoritmo On-Off.
Los parámetros del 3° grupo se presentan solamente
si 1 de las 3 entradas lógicas está configurada como
“Imposición 2° terna P.ID. (Código 8)
7 Parámetros no presentes para algoritmo On-Off o
para servomotores.
8 Índice de acceso a los parámetros.
Cada dígito define el acceso a los parámetros para
cada grupo:
1° grupo
Q2222
ZA.par
2° grupo
3° gruppo
4° grupo
Índices de acceso
Visibles y modificables 2
Visibles pero NO MODIFICABLES 1
NO VISIBLES 0
9 Presente solamente si 1 de las 3 entradas lógicas
está configurada como “Imposición de Y1 = valor
de forzamiento (Código10)
27
I
QUINTO GRUPO
I
I
ZpAss.
contraseña de acceso
(véase pág. 20)
>
NO
Regreso en función normal
OK
SÍ
directamente desde la configuración
PSSS0
P2222
ZA.par.
>
PSSS1
ZA.tu.
>
PSSS9
ZsCIS
>
PSSS1
ZAddr..
>
PIN.SCALA
Zs.p.l.I.
>
PF. SCALA
Zs.p.l.h.
>
PSSS0
Zs.p.r.b.
>
Índice de acceso a los
parámetros (8)
0000…2222
Código habilitación Tune
0 No habilitado
1 Tune habilitado
Habilitación e índices
comunicación serial
(si presente) (véase la tabla)
Zs.p.5.b.
>
>
PIN.SCALA
Zs.p.I.5.
>
PF. SCALA
Zs.p.h.5.
(si presente)
>
Límite inferior Set point
Master
Inicio escala X1…s.p.l.h
Límite superior Set point
Master
s.p.l.I…fondo escala X1
Polarización (Bias) del
Set point Remoto (si habilitado)
-100…200 % c.s.
PS1:00 Relación (Ratio) del
Set point Remoto (si habilitado)
-9.99…10.00
Zs.p.r.r.
Protocolo
—
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
PSSS0
ZyI.SS
>
PS100
Zyh.SS
>
PS100
Zyh. C.
>
>
>
Índice
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
PS1:00 Relación (Ratio) del
Set point Slave
-9.99…10.00
Zs.p.5.r.
Dirección com. serial
1…247
Condiciones
Inhabilitada
>
>
>
PS
0
PSSS0
PSSS0
PSSS0
PSSS0
Zsa.y4
Modo
local o
supervisor
>
Máximo valor Y1▼
(sólo para salida doble)
10…100% salida
Input shift entrada X2
-60…60 digit
Zsa.y3
>
Máximo valor Y1
(No presente si On-Off o para
servomotores) 10…100% salida
PSSS0
Zsa.y2
Lectura y
escritura
Mínimo valor Y1 (No presente si
On-Off, para servomotores y con salida
doble) 0…90% salida
Input shift entrada X1
-60…60 digit
Zsa.yI
>
Límite superior Set point
Slave
s.p.I.5…
. fondo escala X2
ZIn.sh.
ZyIpr.
Sólo
Lectura
Límite inferior Set point
Slave
Inicio escala X2…s.p.h.5.
PSSS0
ZIn.s.2
Baud
—
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
Polarización (Bias) del
Set point Slave
-100…200 % c.s.
PSSS0
Zsa.y5
>
Valor forzamiento Y1 (9)
0…100% salida
(-100…100% salida doble)
Valor seguridad Y1
0…100% salida
(-100…100% salida doble)
Índice
SeguridadY2 0 = NoHabilitada
1 = Cont. abierto
En alarma 2 = Cont. cerrado
Índice
Seguridad Y3 0=NoHabilitada
En alarma 1 = Cont. abierto
2 = Cont. cerrado
Índice
Seguridad Y4 0=NoHabilitada
En alarma 1 = Cont. abierto
2 = Cont. cerrado
Índice
Seguridad Y5 0=NoHabilitada
En alarma 1 = Cont. abierto
2 = Cont. cerrado
{
{
{
{
28
6.3
Parámetrización
Este proceso ha sido temporizado.
Si no se pulsan las teclas durante
30 segundos aproximadamente, se
regresa al funcionamiento normal.
PRIMER GRUPO
Qpar.
X
Acceso a los
parámetros
>
PS300
Zy2s.p.
PSS10
>
Zs.p.S1
1° Set Point
memorizado (1)
PSS20
2° Set Point
memorizado (1)
Zs.p.S2
>
PSS30
Zs.p.S3
>
>
>
>
ZsI. d.
>
>
Histéresis Y4 (4)
0.01…10.00% e.e.
PS300
Zy55.p.
>
Set Point Y4 (3)
PS0:50
Zy4Hy.
>
Histéresis Y3 (4)
0.01…10.00% e.e.
PS300
Zy4s.p.
PSS0:0
Set Point Y3 (3)
PS0:50
Zy3Hy.
P S0:0 Rampa en subida del
S
Set Point (2)
0.0…10.0% e.e.
0.1 digit/min.
Histéresis Y2 (4)
0.01…10.00% e.e.
PS300
Zy35.p.
3° Set Point
memorizado (1)
ZsI. u.
>
PS0:50
Zy2Hy.
>
Set Point Y2 (3)
Set Point Y5 (3)
PS0:50
Zy5Hy.
Histéresis Y5 (4)
0.01…10.00% e.e.
>
Esquema en bloques 1 Loop de relación
Qsp.l.h.
K
Salida individual
Qyh.
Qp.b. 2
Qt.i. 2
Qt.d. 2
Y1
Qsp.l.1.
1°
2° Set PID
Qp.b.
Qt.i.
Qt.d.
Dir
Inv
Y1
QyI.
1
K
Salida doble
QsI. u.
X2
WT
QsI. d.
X1
Qy.5I.u.
W
PID+F
X
Qyh.
Auto
Man
Y
Y1▲
(calor)
Qy.5I.d.
< +
Qd.b.
Qyh. C.
Y1▼
(frío)
En el regulador QD de relación el Set point aplicado al algoritmo PID se obtiene multiplicando
(o dividiendo si la relación es inversa) la variable de referencia por un factor K que es la
relación que queremos obtener.
Ejemplo: WT = X2•K (Relación directa)
WT = X2• 1 (Relación inversa)
K
29
6
PROCESO DE PROGRAMACIÓN
SEGUNDO GRUPO
X
Para conseguir un uso más inmediato de
los parámetros del 2° grupo, éstos se
representan en función del algoritmo de
regulación anteriormente seleccionado.
Algoritmo de regulación PID
(configurado como B=14_15_16_17)
Algoritmo de regulación PID sólo para salida
servomotores (conf. como B=14_15_16_17 y T=3)
>
>
PSS5:0 Banda proporcional
0.5...999.9% c.s.
PSS5:0
Zp.b.
>
Zp.b.
PSS1:0 Tiempo integral
(excluible con 0,0)
0.0...100.0 minutos
>
PS0:20 Tiempo derivativo
(excluible con 0,00)
0.00...10.00 minutos
>
PSS50 Realineación salida
>
Zt.i.
>
Zr.y.
>
PS50:0 Fuzzy intensity
(excluible con 0,0)
0.0…90.0%
>
PSS30 Tiempo de ciclo Y1
>
Zt.c.
>
Zt.c.SC.
>
>
>
(sólo para Relé o lógica)
Zpot.1
1…200 segundos
Zd.b.
Y
PSS1:0 Ganancia relativa del frío
(5)
0.1…3.0
Zpot.1
Y
>
Y
>
Con la válvula parada, la
tecla A/M introduce el
valor de inicio escala (0)
La válvula se sitúa en el
fin de carrera superior
Zpot.h
30
Calibrado de la válvula
La válvula se sitúa en el
fin de carrera inferior
>
Zr.c.r.
>
PSS1:0 Mínima resolución salida
0.1…10.0% salida
Zdy.
1…200 segundos
PSS1:0 Zona muerta (5)
0.0…5.0% salida
PSS60 Tiempo carrera del
servomotor
15…600 segundos
Zt.y.
(sólo para Relé o lógica)
PSS30 Tiempo de ciclo Y1▼ (5)
PSS50 Fuzzy intensity
(excluible con 0,0)
0.0...90.0%
Zf.Int.
Zf.Int.
>
PS0:00 Tiempo derivativo
(excluible con 0,00)
0.00...10.00 minutos
Zt.d.S
(presente sólo con t.i excluida)
0...100% o
-100...100% para doble salida
PSS1:0 Tiempo integral
(excluible con 0.0)
0.0...100.0 minutos
Zt.i.
Zt.d.S
>
Banda proporcional
0.5...999.9% c.s.
Con la válvula parada, la
tecla A/M introduce el valor
de fondo escala (100)
6
1 LOOP - RELACIÓN
TERCER GRUPO
CUARTO GRUPO
X
>
PSS5:0
Zp.b. 2
>
X
>
Banda proporcional (6)
0.5...999.9% c.s.
Zf.Err.
>
PSS1:0 Tiempo integral (6)
(excluible con 0,0)
0.0...100.0 minutos
>
PS0:20 Tiempo derivativo(6)
(excluible con 0,00)
0.00...10.00 minutos
>
PSS50
Zr.y. 2
>
PSSS3
Zt.san.
Zt.d. 2S
>
Realineación salida (6)
(presente sólo con t.i excluida)
PSSS0
Zt.fiI.
0...100% o
-100...100% para doble salida
P 1:0 Ganancia relativa del
S
frío (5)
0.1…3.0
>
Zr.c.r.2
PSSS0
Zt.fi.2
>
>
PSSS0
Zy5I.u.
>
I
% campo fuzzy (6)
0.5…999.9% c.s.
P1O:00
Zf.der.
Zt.i. 2
>
PS20:0
Derivada Fuzzy (6)
0.10…99.99% c.s./min
Tiempo de muestreo
0…30 seg
(con 0 = 0,5seg)
Constante de tiempo del
filtro entrada X1
(excluible con 0) 0…30 seg
Constante de tiempo del
filtro entrada X2
(excluible con 0) 0…30 seg
Máx velocidad de
aumento de Y1(7)
(excluible con 0) 0…20 %/seg
PSSS0 Máx velocidad de
disminución de Y1(7)
(excluible con 0) 0…20 %/seg
Zy5I.d.
>
Notas
1 Los 3 Sets points memorizados se presentan
solamente si el tipo de set point ha sido
configurado como local y con 3 memorizados
(véase la pág. 18). Se pueden configurar en todo
el campo escala, pero están condicionados por
eventuales límites del set point introducidos en el
5° grupo.
4 No se encuentra presente si “Intervención alarmas”
Y2,Y3,Y4 o Y5 está configurada como desactivada o por
interrupción entrada.
V-W-X-Y = 0,1,2 (véase pág.19)
2 Con 0,0 la rampa se excluye, la variación del Set
point es escalonada. El campo de configuración
máximo equivale al 10% del campo escala
expresado en digit. Ejemplo:
Escala:
-200…600°C
Amplitud escala:
800°C
Máx valor configurable:
80,0 digit/min
Correspondiente a:
80,0°C/min
6 Parámetros no presentes con algoritmo On-Off. Los
parámetros del 3° grupo se presentan solamente si 1 de
las 3 entradas lógicas está configurada como “Imposición
2° terna P.ID.” (Código 8)
3 No se encuentra presente si “Intervención alarmas”
Y2,Y3,Y4 o Y5 está configurada como desactivada
o por interrupción entrada.
V-W-X-Y = 0,1,2 (véase pág.19)
El campo de configuración del Set Point de Y2 e
Y3 varía en función de la configuración :
• Independiente:
en toda la escala
• Desviación:
-300…+300
• Banda:
0…300
5 Solamente para salida de doble acción.
7 Parámetros no presentes para algoritmo On-Off o para
servomotores.
8 Índice de acceso a los parámetros.
Cada dígito define el acceso a los parámetros para cada
grupo.
1° grupo
Q2222
ZA.par
2° grupo
3° grupo
4° grupo
Índices de acceso
Visibles y modificables 2
Visibles pero NO MODIFICABLES 1
NO VISIBLES 0
9 Presente solamente si 1 de las 3 entradas lógicas
está configurada como “Imposición de Y1 = valor
de forzamiento (Código10)
31
I
QUINTO GRUPO
I
I
ZpAss.
contraseña de acceso
(véase pág. 20)
>
NO
Regreso en función normal
OK
SÍ
directamente desde la configuración
P2222
ZA.par.
>
PSSS1
ZA.tu.
>
PSSS9
ZsCIS
>
PSSS1
ZAddr.
>
PIN.SCALA
Zs.p.l.I.
>
PF. SCALA
Zs.p.l.h.
>
PSSS0
ZyI.SS
Código habilitación Tune
0 No habilitado
1 Tune habilitado
>
Habilitación e índices
comunicación serial
>
>
(si presente)
Límite inferior Set point
Inicio escala…s.p.l.h
Límite superior Set point
s.p.l.I…fondo escala
>
>
>
Protocolo
—
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
PSSS0
PSSS0
Zsa.y2
Condiciones
Inhabilitada
PSSS0
Zsa.y3
>
Sólo
Lectura
0
Zsa.y1.
>
Baud
—
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
PS
Z.yIpr.
PS1:00 Relación (Ratio) del
Set point Remoto (si habilitado)
-9.99…10.00
>
PSSS0
ZIn.s.2
Zs.p.r.r.
Índice
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
PSSS0
ZIn.sh.
1…247
>
Zs.p.r.b.
PS100
Zyh. C.
(si presente) (véase la tabla)
Dirección com. serial
PS100
Zyh.SS
Polarización (Bias) del
Set point Remoto (si habilitado)
-100…200 % c.s.
PSSS0
>
Índice de acceso a los
parámetros (8)
0000…2222
PSSS0
Zsa.y4
>
PSSS0
Zsa.y5
Mínimo valor Y1 (No presente si
On-Off, para servomotores y con salida
doble) 0…90% salida
Máximo valor Y1
(No presente si On-Off o para servomotores)
10…100% salida
Máximo valor Y1▼
(sólo para salida doble)
10…100% salida
Input shift entrada X1
-60…60 digit
Input shift entrada X2
-60…60 digit
Valor forzamiento Y1 (9)
0…100% salida
(-100…100% salida doble)
Valor seguridad Y1
0…100% salida
(-100…100% salida doble)
Índice
Seguridad Y2 0 = NoHabilitada
1 = Cont. abierto
En alarma 2 = Cont. cerrado
Índice
SeguridadY3 0 = NoHabilitada
En alarma 1 = Cont. abierto
2 = Cont. cerrado
Índice
Seguridad Y4 0 = NoHabilitada
1 = Cont. abierto
En alarma 2 = Cont. cerrado
Índice
SeguridadY5 0 = NoHabilitada
En alarma 1 = Cont. abierto
2 = Cont. cerrado
{
{
{
{
>
Lectura y
escritura
Modo
local o
supervisor
32
6.3
Parametrización
Este proceso ha sido temporizado.
Si no se pulsan las teclas durante
30 segundos aproximadamente, se
regresa al funcionamiento normal.
PRIMER GRUPO
Qpar.
>
X
Acceso a los
parámetros
PS300
Zy2s.p.
PSS10
Zs.p.S1
>
PSS20
Zs.p.S2
>
PSS30
Zs.p.S3
>
PSS0:0
ZsI. u.
>
PSS0:0
ZsI. d.
>
PSS0:0
ZsI.u.b
>
PSS0:0
ZsI.d.b
1° Set point memorizado
Loop A (1)
2° Set point memorizado
Loop A (1)
3° Set point memorizado
Loop A (1)
Rampa en subida
del Set point Loop A(2)
0.0…10.0% c.s.
0.1 digit/min.
Rampa en bajada
del Set point Loop A(2)
0.0…10.0% c.s.
0.1 digit/min.
Rampa en subida
del Set point Loop B(2)
0.0…10.0% c.s.
0.1 digit/min.
Rampa en bajada
del Set point Loop B(2)
0.0…10.0% c.s.
0.1 digit/min.
>
Set point Y2 (3)
PS0:50
Zy2Hy.
>
Histéresis Y2 (4)
0.01…10.00% c.s.
PS300
Zy35.p.
>
Set point Y3 (3)
PS0:50
Zy3Hy.
>
Histéresis Y3 (4)
0.01…10.00% c.s.
PS300
Zy4s.p.
>
Set point Y4 (3)
PS0:50
Zy4Hy.
>
Histéresis Y4 (4)
0.01…10.00% c.s.
PS300
Zy55.p.
>
Set point Y5 (3)
PS0:50
Zy5Hy.
>
Histéresis Y5 (4)
0.01…10.00% c.s.
>
Esquema en bloques 2 loops independientes
WLA
Qsp. 1
Qsp. 2
Qsp. 3
W Local
1°
2° Sets memorizados
3°
1°
2° Set PID
Qp.b.
Qt.i.
Qt.d.
Loop "A"
Qp.b. 2
Qt.i. 2
Qt.d. 2
LOC
REM
Qsp.l.h.
W Remoto
QsI. u.
WT
Qsp.l.1.
Qy.5I.u.
W1
QsI. d.
X1
PID+F
X1
Auto
Man
Y
Qyh.
Qy.5I.d.
Y1
< +
QyI.
Qsp.h.b.
WLB
X2
QsI.u.b.
WTB
QspI.b.
Loop "B"
Auto
Man
W2
QsI.d.b.
PID
Y2
Qyh. b
Yb
X2
< +
QyI. b
En el regulador QD se encuentran presentes 2 reguladores independientes, el primero
de ellos, denominado Loop A posee más funciones por ejemplo la presencia de la acción
Fuzzy, la elección del Set Point, los slopes en la salida y la posibilidad de seleccionar 2
sets de parámetros PID desde entrada lógica o línea serial. El segundo, denominado Loop
B, es sólo un PID sencillo.
33
6
PROCESO DE PROGRAMACIÓN
SEGUNDO GRUPO
X
Para conseguir un uso más inmediato de
los parámetros del 2° grupo, éstos se
representan en función del algoritmo de
regulación anteriormente seleccionado.
Algoritmo de regulación PID sólo para salida
servomotores (config. B=18_19_20_21 y T=12_13)
>
Algoritmo de regulación PID
(configurado como B=18_19_20_21)
>
>
>
PS0:20 Tiempo derivativo Loop A
(excluible con 0,00)
0.00...10.00 minutos
>
PSS50 Realineación salida
Loop A
Zr.y.
>
(presente sólo con t.i excluida)
>
Zt.i. b
>
PS0:20 Tiempo derivativo Loop B
(excluible con 0,00)
0.00...10.00 minutos
Zt.d. b
>
PSS50 Realineación salida
Loop B
Zr.y. b
>
(presente sólo con t.i excluida)
Zf.Int.
>
>
(sólo para Relé o lógica)
1…200 segundos
PSS30 Tiempo de ciclo Y1 Loop B
Zt.c.Sb
>
>
(sólo para Relé o lógica)
1…200 segundos
PS0:20 Tiempo derivativo Loop B
(excluible con 0,00)
0.00...10.00 minutos
Zt.d. b
>
PSS50 Fuzzy intensity
(excluible con 0,0)
0.0...90.0%
Zf.Int.
>
PSS30 Tiempo de ciclo Y1 Loop B
Zt.c.Sb
>
1…200 segundos
PSS60 Tiempo carrera del
servomotor
15…600 segundos
>
PSS1:0 Mínima resolución salida
0.1…10.0% salida
Zdy.
>
Zpot.1
Calibrado de la válvula
Zpot.1
Con la válvula parada, la
tecla A/M introduce el
valor de inicio escala (0)
La válvula se sitúa en el
fin de carrera superior
Con la válvula parada, la
tecla A/M introduce el valor
de fondo escala (100)
>
Y
Y
>
Zpot.h
Y
>
34
(sólo per Relé o lógica)
Zt.y.
PSS30 Tiempo de ciclo Y1 Loop A
Zt.c.
PSS1:0 Tiempo integral Loop B
(excluible con 0,0)
0.0...100.0 minutos
Zt.i. b
0...100%
PS50:0 Fuzzy intensity Loop A
(excluible con 0,0)
0.0…90.0%
PSS5:0 Banda proporcional
Loop B
0.5...999.9% c.s.
Zp.b. b
PSS5:0
Zp.b. b
PS0:00 Tiempo derivativo Loop A
(excluible con 0,00)
0.00...10.00 minutos
Zt.d.S
0...100%
Banda proporcional
Loop B
0.5...999.9% c.s.
P S1:0 Tiempo integral Loop B
S
(excluible con 0,0)
0.0...100.0 minutos
PSS1:0 Tiempo integral Loop A
(excluible con 0.0)
0.0...100.0 minutos
Zt.i.
PSS1:0 Tiempo integral Loop A
(excluible con 0,0)
0.0...100.0 minutos
Zt.d.S
>
>
>
Zt.i.
>
Zp.b.
PSS5:0 Banda proporcional
Loop A
0.5...999.9% c.s.
Zp.b.
PSS5:0 Banda proporcional
Loop A
0.5...999.9% c.s.
6
2 LOOPS INDEPENDIENTES
TERCER GRUPO
CUARTO GRUPO
X
X
I
Banda proporcional
Loop A (6)
0.5...999.9% c.s.
% Campo fuzzy Loop A
0.5…999.9% c.s.
Tiempo integral Loop A
(6) (excluible con 0,0)
0.0...100.0 minutos
Derivada Fuzzy Loop A
0.10…99.99% c.s./min
Tiempo derivativo Loop A
(6) (excluible con 0,00)
0.00...10.00 minutos
Tiempo de muestreo
Loop A
0…30 seg (con 0 = 0,5seg)
Realineación salida Loop A
(6) (presente sólo con t.i excluida)
0...100%
Constante de tiempo del
filtro entrada X1
(excluible con 0)
0…30 seg
Constante de tiempo del
filtro entrada X2
(excluible con 0)
0…30 seg
Máx velocidad de
aumento de Y1Loop A (7)
(excluible con 0) 0…20 %/seg
Máx velocidad de
disminución de Y1
Loop A (7)
(excluible con 0) 0…20 %/seg
Notas
1 Los 3 Sets points memorizados se presentan
solamente si el tipo de set point ha sido
configurado como local y con 3 memorizados
(véase la pág. 18). Se pueden configurar en todo
el campo escala, pero están condicionados por
eventuales límites del set point introducidos en el
5° grupo.
2 Con 0,0 la rampa se excluye, la variación del Set
point es escalonada. El campo de configuración
máximo equivale al 10% del campo escala
expresado en digit. Ejemplo:
Escala:
-200…600°C
Amplitud escala:
800°C
Máx valor configurable:
80,0 digit/min
Correspondiente a:
80,0°C/min
3 No se encuentra presente si “Intervención alarmas”
Y2,Y3,Y4 o Y5 está configurada como desactivada
o por interrupción entrada.
V-W-X-Y = 0,1,2 (véase pág.19)
El campo de configuración del set point de Y2 e
Y3 varía en función de la configuración:
• Independiente:
en toda la escala
• Desviación:
-300…+300
• Banda:
0…300
4 No se encuentra presente si “Intervención alarmas”
Y2,Y3,Y4 o Y5 está configurada como desactivada
o por interrupción entrada.
V-W-X-Y = 0,1,2 (véase pág.19)
5 Solamente para salida de doble acción.
6 Los parámetros del 3° grupo se presentan
solamente si 1 de las 3 entradas lógicas está
configurada como “Imposición 2° terna P.ID.”
(Código 8)
7 Parámetros no presentes para servomotores.
8 Índice de acceso a los parámetros. Cada dígito
define el acceso a los parámetros para cada grupo:
1° grupo
2° grupo
3° grupo
4° grupo
Q2222
ZA.par
Q2222
Índices de acceso
Visibles y modificables 2
Visibles pero NO MODIFICABLES 1
NO VISIBLES 0
ZA.par
9 Presente solamente si 1 de las 3 entradas lógicas
está configurada como “Imposición de Y1 = valor
de forzamiento” (Código10)
35
I
QUINTO GRUPO
I
I
ZpAss.
contraseña de acceso
(véase pág. 20)
>
NO
Regreso en función normal
OK
SÍ
directamente desde la configuración
PSSS0
P2222
ZA.par.
>
PSSS1
ZA.tu.
>
PSSS9
ZsCIS
>
PSSS1
ZAddr.
>
PIN.SCALA
Zs.p.l.I.
>
PF. SCALA
Zs.p.l.h.
>
PIN.SCALA
Zs.p.I.b
>
PF. SCALA
Zs.p.h.b
Índice de acceso a los
parámetros (8)
0000…2222
Código habilitación Tune
0 No habilitado
1 Tune habilitado
Habilitación e índices
comunicación serial
(si presente) (véase la tabla)
Zs.p.r.b.
>
>
PSSS0
Zy1..SS
>
PS100
Zyh.SS
(si presente)
>
Límite inferior Set point
Loop A
Inicio escala…s.p.l.h
Límite superior Set point
Loop A
s.p.l.I…fondo escala
Límite inferior Set point
Loop B
Inicio escala…s.p.h.b.
Límite superior Set point
Loop B
s.p.I.b…
. fondo escala
Protocolo
—
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
ModBus
ModBus
ModBus
ModBus
JBus
JBus
JBus
JBus
PS
0
ZyI. b
>
PS100
Zyh. b
>
PSSS0
ZIn.sh.
>
PSSS0
ZIn.s.2.
>
>
Índice
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
PS1:00 Relación (Ratio) del
Set point Loop A
(si habilitado) -9.99…10.00
Zs.p.r.r.
Dirección com. serial
1…247
PS
0
ZyIpr.
Baud
—
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
9600
4800
2400
1200
Condiciones
Inhabilitada
>
PSSS0
Zsa.yI
Sólo
Lectura
>
PSSS0
Zsa.y2
>
PSSS0
Zsa.y3
Lectura y
escritura
>
PSSS0
Zsa.y4
>
PSSS0
Zsa.y5
Modo
local o
supervisor
Polarización (Bias) del Set
point Loop A
(si habilitado) -100…200 % c.s.
>
Mínimo valor Y1 Loop A
(No presente si para servomotores)
0…90% salida
Máximo valor Y1 Loop A
(No presente si para servomotores)
10…100% salida
Mínimo valor Y1 Loop B
0…90% salida
Máximo valor Y1 Loop B
10…100% salida
Input shift entrada X1
-60…60 digit
Input shift entrada X2
-60…60 digit
Valor forzamiento Y1
Loop A (9)
0…100% salida
Valor seguridad Y1 Loop A
0…100% salida
Índice
Seguridad Y2 0=NoHabilitada
1 = Cont. abierto
En alarma 2 = Cont. cerrado
Índice
SeguridadY3 0 = NoHabilitada
En alarma 1 = Cont. abierto
2 = Cont. cerrado
Índice
Seguridad Y4 0=NoHabilitada
En alarma 1 = Cont. abierto
2 = Cont. cerrado
Índice
Seguridad Y5 0=NoHabilitada
En alarma 1 = Cont. abierto
2=Cont.cerrado
{
{
{
{
PSSS0
Zsa.yb
Valor seguridad Y1 Loop B
0…100% salida
>
36
6
PROCESO DE PROGRAMACIÓN
6.4•
Descripción parámetros
Para simplificar el ejercicio, se han dividido los parámetros en grupos de
funciones homogéneas entre ellas. Los grupos han sido dispuestos siguiendo
un criterio de funcionalidad.
PRIMER GRUPO
Zs.p. 1
Zs.p. 2
Zs.p. 3
1° Set point
memorizado
2° Set point
memorizado
3° Set point
memorizado
Valores de Set establecidos,
activables mediante entradas
lógicas, teclado y comunicación
serial. El N° del Set invocado,
aparece en la pantalla frontal auxiliar.
Zs1. u.
Zs1. d.
Zs1.u.b
Zs1.d.b
Rampa en subida Set point
de trabajo Master o loop A
Rampa en bajada Set point
de trabajo Master o loop A
Rampa en subida Set point
de trabajo loop B
Rampa en bajada Set point
de trabajo loop B
Velocidad de variación del Set Point
principal de trabajo expresada en
digit/min.
Z 2s.p.
y
y
Z 3s.p.
Zy4.5.p.
Zy55.p.
Set point alarma
salida Y2
Set point alarma
salida Y3
Set point alarma
salida Y4
Set point alarma
salida Y5
Set point de intervención de las
salidas Y2, Y3, Y4, Y5. El modo de
intervención depende de la
configuración.
Nota: los Sets points de alarma se
suceden alternativamente con los
respectivos valores de histéresis.
Z 2Hy..
y
y
Z 3Hy..
Zy4Hy..
Zy5Hy.
Histéresis de intervención
alarma Y2
Histéresis de intervención
alarma Y3
Histéresis de intervención
alarmaY4
Histéresis de intervención
alarma Y5
Zona de histéresis de las salidas Y2,
Y3, Y4, Y5. Se expresa en %
amplitud escala.
37
Modos de intervención de las alarmas
Intervención de Desviación
On Activa
Off alta
W1
Activa
baja
H
W
-300 unidades
+300 unidades
Intervención de Banda
On Activa
Off fuera
W1
H
Activa
dentro
H
IWI
IWI
300 unidades
300 unidades
Intervención Independiente
On Activa
Off alta
W1
On
Off Activa
baja
H
W
Inicio escala
Fondo escala
Rotura sensor e interrupción entrada
Sensor
T
Indicación
Fuera escala
superior
8888
Z____
8888
Z---Fuera escala
inferior
Salidas Y2 e Y3
Abierto en alarma
(índice de seguridad 1)
N.C.
Cerrado en alarma
(índice de seguridad 2)
N.A.
Histéresis de intervención
W
Off
H
On
6
SEGUNDO GRUPO
Zp.b.
Zp.b. s.
Zp.b. b.
Banda proporcional
Master o loop A
Banda proporcional
Slave
Banda proporcional
loop B
La acción proporcional determina una
variación de la salida de regulación Y1,
proporcional al error W – X.
Zt.i.
Zt.i. s.
Zt.i. b.
Tiempo integral
Master o loop A
Tiempo integral
Slave
PROCESO DE PROGRAMACIÓN
Notas : los parámetros de regulación
se suceden en función de la terna
de pertenencia y en base a la
configuración seleccionada.
Zd.b.SS
Zona muerta entre las acciones de
regulación calor/frío.
Algoritmo calor/frío
Calor
100%
yh.
Tiempo derivativo
loop B
Es el tiempo necesario solamente
para la acción P para alcanzar el
mismo nivel P+D.
Zr.y.
Zr.y. s.
Zr.y. b.
0
100%
salida calor
Zr.c.r.S
0
100%
salida frío
Ganancia relativa al
algoritmo Frío
Ganancia relativa a la acción frío
respecto a la acción calor.
Zt.y.SS
Tiempo de abertura
servomotor
Tiempo total empleado por el
servomotor para ejecutar la carrera
entre 0% y 100%.
Zdy.SS
Mínima variación salida
servomotor
Realineación salida de
regulación loop B
Entrada en el proceso de calibrado
del indicador de posición mediante
potenciómetro.
Intensidad de la acción
Fuzzy Master o loop A
Tiempo de ciclo salida Y1
Master o loop A
Tiempo de ciclo salida Y1▼
"Frío" Master o loop A
Tiempo de ciclo salida Y1
loop B
Durante este tiempo, el algoritmo de
regulación modula en porcentaje los
tiempos de On y de Off de la salida
principal de regulación.
38
d.b. P.b. / r.c.r
P.b.
Resolución de colocación o zona
muerta del servomotor.
Este parámetro permite variar el
porcentaje de modulación del
algoritmo Fuzzy respecto al de PID.
Zt.c.
Zt.c. C.
Zt.c. b.
yh.C.
Realineación salida de
regulación Master o loop A
Realineación salida de
regulación Slave
En ausencia de la acción integral,
determina el valor de la salida Y1
para X+ W.
Zf.int.
Frío
W
Es el tiempo empleado solamente por
la acción integral para repetir el aporte
dado por la acción proporcional.
Zt.d.
Zt.d. s.
Zt.d. b.
Calor
Tiempo integral
loop B
Tiempo derivativo
Master o loop A
Tiempo derivativo
Slave
Zona muerta entre las
salidas Calor/Frío
Zpot.I.
ZHy.
Calibrado
potenciómetro
de la salida de
EffettoHistéresis
del filtro
regulación Y1
Zona de histéresis de la salida
principal de regulación. Se expresa
en % amplitud escala.
TERCER GRUPO
Zp.b. 2
Banda proporcional 2°
set P.I.D. Master o loop A
La acción proporcional determina una
variación de la salida de regulación
Y1, proporcional al error W – Y.
Zt.i. 2
Tiempo integral 2° set
P.I.D. Master o loop A
Es el tiempo empleado solamente por
la acción integral para repetir el aporte
dado por la acción proporcional.
6
Zt.d. 2
PROCESO DE PROGRAMACIÓN
Tiempo derivativo 2°set
P.I.D. Master o loop A
Es el tiempo necesario solamente
para la acción P para alcanzar el
mismo nivel P+D.
Zr.y. 2
Realineación salida Y1
2°set P.I.D. Master o loop A
En ausencia de la acción integral,
determina el valor de la salida Y1
para X = W.
r
Z c
. r
. . 2
Ganancia algoritmo Frío
2°set P.I.D. Master o loop A
Ganancia relativa a la acción frío
respecto a la acción calor.
CUARTO GRUPO
f
Z E
. rr..
Campo de acción del
algoritmo Fuzzy
Amplitud del campo de intervención
Fuzzy. Se calcula en % escala.
Zf.der..
Derivada Fuzzy
Este parámetro “informa” al algoritmo
Fuzzy sobre cuál será la máxima
velocidad del proceso a regular.
Se expresa en % escala/minuto.
y
Z s
. I.u.
y
Z s
. I.d.
Máxima velocidad de
aumento Y1
Máxima velocidad de
disminución Y1
I
Es la máxima velocidad que puede
alcanzar la salida principal de
regulación Y1. Se expresa en %
salida/segundo.
QUINTO GRUPO
A
Z p
. ar.
Contraseña de acceso a los
grupos de los parámetros
ZA.tu..S
Habilitación proceso
de Self-Tune
(Véase pág.20)
Habilitación Self-Tune
0 = No habilitado
1 = Disponible
ZsC1S
Parámetros y habilitación
puerto serial
(Véase la tabla asociada al 5° grupo)
ZAddr.
Dirección serial del
regulador
La dirección configurable entre 1 y 247
debe ser unívoca entre reguladores
conectados a un único supervisor.
Zs.p.l.1.
Zs.pI.b
Límite inf. del Set point de
trabajo Master o loop A
Límite inferior del Set
point de trabajo loop B
Límite inferior de oscilación del Set
point principal W.
t
Z s
. an..
Tiempo de muestreo
Es el tiempo de muestreo del
regulador expresado en segundos.
t
Z f
. i1..
t
Z f
. i.2.
Constante de tiempo del
filtro digital entrada X1
Constante de tiempo del
filtro digital entrada X2
Es la constante de tiempo expresada
en segundos del filtro RC aplicado
en la entrada de la variable principal.
Límite superior Set point
de trabajo loop B
Límite superior de oscilación del
Set point principal W.
Zs.p.r.b.
Zs.p.s.b.
Zs.p.r.r.
Zs.p.s.r.
100%
0 t.Fil.
Límite superior Set point
de trabajo Master o loop A
Polarizac. de bias Set point
remoto Master o loop A
Polarización de bias del
Set point Slave
Punto de salida del Set point remoto
analógico expresado en unidades
de ingeniería.
Efecto del filtro
63,2%
Zs.p.l.h
Zs.p.h.b
X
Tiempo
Ganancia del Set point
remoto Master o loop A
Ganancia del Set point
Slave
Función que determina la amplitud
de oscilación del Set point remoto.
39
6
Zyh. C..
Ejemplo de polarización
I
S.P.r.b.= 200
S.P.r.r. = 0,50
Señal
remota 10 V
0
200
800
Oscilación
Set Remoto
oscilación set remoto = span x S.P.r.r.
s
Z p
. I
. s
. .
1200 °C
Escala
Límite inferior Set point
Slave
Límite inferior de oscilación del Set
point del regulador Slave
s
Z p
. h
. s
. .
Límite superior
Set point Slave
Límite superior de oscilación del Set
point del regulador Slave
y
Z 1.SS
y
Z I. b
Mínimo valor de Y1
Master o loop A
Mínimo valor de Y1
loop B
Valor mínimo adquirido por la salida
Y1 en la fase de regulación. El límite
se encuentra activado en el modo
manual también.
Z h..SS
y
Zyh..Sb
Máximo valor de Y1
loop Master o A
Máximo valor de Y1
loop B
Valor máximo adquirido por la salida
Y1 en la fase de regulación. El límite
se encuentra activado en el modo
manual también.
40
PROCESO DE PROGRAMACIÓN
Máximo valor de Y1
"Frío" loop Master o A
Valor máximo adquirido por la salida
Y1 “ Frío ” en la fase de regulación.
El límite se encuentra activado en el
modo manual también.
1
Z n.sh.
1
Z n.s2
.
Input shift entrada X1
Input shift entrada X2
Esta función traslada toda la escala
de +/- 60 digit.
y
Z Ipr.
Valor de forzamiento Y1
mediante entrada lógicas
Es el valor adquirido por Y1 cuando
se produce un forzamiento mediante
entrada lógica.
Zsa.y1
Zsa.yb
Valor de seguridad Y1
Master o loop A
Valor de seguridad Y1
loop B
Es el valor adquirido por Y1 en caso de
fuera escala de la variable principal X.
s
Z a.y2
s
Z a.y3
s
Z a.y4
s
Z a.y5
Índice seguridad Y2
Índice seguridad Y3
Índice seguridad Y4
Índice seguridad Y5
Condiciones adquiridas por Y2, Y3,
Y4 y Y5, en caso de fuera escala de
la variable principal X. (Véase la tabla
de pág.19)
7
INSTRUCCIONES DE FUNCIONAMIENTO
Funciones de las teclas y de las pantallas
I
C
Auto-tune en curso
Medida
en funcionamiento normal
°
PV
AT
Com. serial activa
1F
SCI
X
PID
Funcionamiento
Manual
MAN
SV
REM
Set Remoto Activo
/M
Set memorizado
activo
F
Valor del dato
en programación
2
3
MV 4
Y
5
W
W/SV
W
°
Set Point
en funcionamiento normal
Código mnemónico
en programación
A
QD
SERIES
Confirmación dato
o "paso adelante"
Acceso menú Set point
Automático/Manual
Selecciona dígito
Acceso menú funciones
Incrementa dígito
7.0•
Menú funciones
Funcionamiento
normal
X
Zsp
. t
. S
>
Visualización
Set-Point de
target
(aparece sólo si los
slopes son diferentes
de 0)
7.1• Modificación Valor Numérico
El valor numérico se cambia modificando
por separado todos los dígitos.
El dígito a modificar parpadea.
Ejemplo: para pasar de 250 a 260
0
Z 25OL
X
t
Z une
>
Lanzamiento
Auto-Tune
X
Pulsar < hasta seleccionar
el dígito a modificar. Con cada
presión de la tecla el parpadeo
se desplaza hacia la izquierda
de un dígito:
0 2 5L 0
X
p
Z arS
>
Acceso a los
parámetros
0
Z 25L0
X
C
Z onf
>
X
Acceso a la
configuración
Pulsar + para incrementar
el dígito seleccionado hasta
el valor deseado (el primer
dígito de la izquierda entre el
9 y el 0 presenta el signo –)
0
9
X
A
Z ddr.
>
X
Visualización
dirección SCI
0
Z 26L0
X
Pulsar > para que el valor
introducido se vuelva
operativo inmediatamente.
7.2•
7.2.1•
Sólo local
7.2.2• Local +3 Set point memorizados
Funcionamiento
normal
Funcionamiento
normal
W
W
Q1125L
Q1125L
Modificación valor
Set point local
s
Z p
. S
. S
Zsp
. .
+
+
<
<
asignación
Set point local
>
Modificación valor
Set point local
asignación
Set point local
>
W
W
s
Z p
. S
. 1
activación
1° Set point
memorizado
>
W
s
Z p
. S
. 2
activación
2° Set point
memorizado
>
W
s
Z p
. S
. 3
activación
3° Set point
memorizado
>
W
7.3•
Auto Man
AUTO
MAN
Funcionamiento
normal
AUTO
100% Set point W
W (X)
W
sI.u.
X
0
100% salida Y
Y
YMAN=YAUTO
modificación
Y
con
0
Y
W=X
<+
Y
M
Z an.
ZAuto.
Y
YAUTO=YMAN
>
Y
Cambio
de estado
Menú Set point
7.2.3•
Notas
Local + Remoto
Funcionamiento
normal
Nota:
En cada cambio de Set point, para todos
los modelos y en cualquier estado de
funcionamiento
W
Q1125L
Zsp
. .
Modificación
valor
Set point local
+
sI.u rampa en subida, sI.d rampa en
bajada).
lor de Set point a alcanzar es
definido "
Ejemplo:
Set point de target = 350°C
a
Cambio del Set point
sI.u. = 10.0 digit /min
<
>
asignación
Set point local
W
Set point inicial
= 250°C
X
s
Z p
. r
. S
. Zsp
. I
. S
.
>
Cambio modo
de Set point
t
t =10 minutos
ov
Zsp. t
Set point de target
Conuev
rampa configurada en 0, el cambio
de Set point es escalonado
W
Con Set point Remoto, aconsejamos, si
es necesario, configurar sl.u y/o sl.d
para 0 (cero).
El n
Set point de target".
En el menú de las funciones se puede
visualizar cuando aparece s.pt
.
7.4•
Auto Tune
Funcionamiento
normal
X
Zsp
. t
. .
>
Visualización
Set-Point de
target
(aparece sólo si los
slopes son diferentes
de 0)
X
>
X
Lanzamiento
Auto Tune
Respuesta a una toma
de carga con PID
optimizado
B
A
Lanzamiento
enTune
t
Z une
Tune en curso
Respuesta a
una toma de
carga con PID
no optimizado
Fin
Tune
A = Variable (PV)
B = Salida (MV)
Ascon spa - manual M.I.U. QD - 1/96.05 IE - regulador QD
7.5•
Visualización páginas
7.5.1•
I
para cascada
>
C
C
°
AT
68. 9
SCI
PID
°
PV
70. 0
50
W
SV
W
68. 9
SCI
X
MAN
REM
AT
1F
PID
°
MAN
2
REM
3
MA
MV 4
Y
5
Visualización
Normal
X = X1 Master
W = W1 Master
Y = Y1 Slave
W
°
AT
>
PID
114. 5
PV
115. 0
sl
50
W
SV
W
°
2
3
MV 4
Y
5
1F
>
X
MAN
REM
1F
X
Visualización
Loop Master
X = X1
W = W1
Y = Y1
C
SCI
70. 0
63
PV
SV
W
°
Visualización Loop
Slave
X = X2
W = W2
Y = Y2
2
3
MV 4
Y
5
7.5.2•
para relación
>
C
C
°
AT
SCI
PID
1280
°
PV
a.
W
1280
50
SV
W
68. 9
SCI
X
MAN
REM
AT
1F
PID
°
MAN
2
REM
3
b.
MV 4
Y
5
Visualización normal
X = relación
W = Set point K
W
70. 0
63
PV
1F
X
SV
W
°
2
3
MV 4
Y
5
Visualización variables
de ingeniería
X = X1
W = X2
>
7.5.3•
para 2 loops independientes
>
C
C
°
AT
SCI
PID
1280
°
PV
a.
W
1280
50
Variables X,W, e Y del
Loop A
SV
W
68. 9
SCI
X
MAN
REM
AT
1F
PID
°
MAN
2
REM
3
b.
MV 4
Y
5
>
W
70. 0
63
PV
1F
X
SV
W
°
2
3
MV 4
Y
5
Variables X,W, e Y del
Loop B
8
I
DATOS TÉCNICOS
Características
Descripción
a 25°C T. ambiente
Posibilidad de Mediante teclado o vía serial, con un menú guiado se puede en secuencia escoger: el tipo de regulación,
config. total
los tipos de entrada, las salidas, los Set points e introducir todos los parámetros de regulación
1 Loop con salida individual/doble
Modo de
1 Loop Cascada (1Master + 1 Slave)
funcionamiento 1 Loop Relación
2 Loops independientes
On-Off, P.I.D., PID + FUZZY y
Algoritmo
PID " Flotante con colocación temporal" para servomotores
0.5…999.9%
Banda Prop. (P)
T. integral (I)
0.0…100.0 min
Excluibles
T. Derivativo (D)
0.00…10.00 min
Intensidad FUZZY
0.0…90.0%
Regulación
Para algoritmo P. y P.D.
Realineación m. salida 0…100%
T. del ciclo
Para salida discontinua
1…200 seg.
Histéresis
0.01…10.00%
Para algoritmo On-Off
Zona neutra
0.0…5.0%
Para algoritmo PID de
Ganancia relativa
doble acción (Calor-Frío)
0.1…3.0
del frío
T. carrera motor
15…600 seg
Para salida servomotores
Correción min.
0.1…10.0%
Potenciómetro
100Ω…10KΩ
Convertidor A/D de 50.000 puntos
Características
Tiempo de muestreo: 0.5 a 30.0 segundos configurables
comunes
Input shift: -60…+ 60 digit
Filtro medida: 0…30 seg. (excluible)
0.2% ± 1 digit (para termoelementos)
Entre 100…240Vac,
Tolerancia
0.1% ± 1 digit (para mA y V)
el error es irrelevante
Entrada medida X1
Línea: 20Ω máx (3 hilos)
Pt100Ω a 0 °C
(véase pág.17)
(IEC 751)
Deriva medida:
Conexión
Termoresistencia
Con selección
0.1°C/10°C T. ambiente
de 2 o 3 hilos
°C/°F/°K
<0.5°C/10Ω R. Línea
L,J,T,K,R,S,B,N,E,W Compensación
Línea 150Ω máx
(IEC 548)
junta fría:
Deriva medida:
Termopares
Con selección
interna o externa
<2µV/°C.T. ambiente
°C/°F/°K
en °C/°F/°K
<5µV/10Ω R. Línea
Corriente
4…20mA,0-20mA Unidad de ingeniería
continua
coma móvil
Ri=30Ω
—
con o sin √
0-20mV, 0-50mV
Deriva medida:
Tensión
I.Sc. -999…9999
Ri=10 MΩ
<0.1%/20°C T. ambiente
continua
0-1/1-5/0-5/0-10V F.Sc. -999…9999
(campo mín 100 digit)
Ri=10kΩ
Un cierre permanente Conmutación Auto/Man, paso Set Local/Remoto,
Entradas
de mandos externos invocación 3 Sets memorizados,
3 de tipo lógico
auxiliares
asociados permite: bloqueo teclado. Introducción : 2° terna parámetros
P.I.D., Y1 = Set Remoto, Y1 = valor de forzamiento
Individual o doble, con acción directa o inversa
Límite inferior
0…90%(canal ▲)
100…10% (canal ▲) -100…-10% (canal ▼)
Límite superior
0…100%,-100…100% (para doble salida)
Val. de seguridad
Val. de forzamiento 0…100%, -100…100% (para doble salida) de entrada lógica
Salida
Relé doble acción, 2 contactos NA, 5A/250Vac, 2x10 5 maniobras
principal Y1
0-22Vdc, 20mA máx Galvánicamente aislada:
Discontinua
Lógica
para relé estático
500 Vac/1min Protegida de c.c.
0-20mA, 4-20mA
Galvánicamente aislada:
Corriente
750Ω/15Vdc máx
500 Vac/1min Protegida de c.c.
Continua
1-5V,0,5V,0-10V
Resol.: 12 bit s (0.025%)
Tensión
Tolerancia: 0.1%
500Ω/20mA máx
Servomotores de 3 posiciones
Relé de doble acción
"Aumenta - Stop - Disminuye"
2 Contactos NA, 5A/250Vac, 2 x 10 5 maniobras
42
8
Características
a 25°C T. ambiente
Salidas
auxiliares
Y2-Y3-Y4-Y5
(libremente
configurable)
Descripción
Relé con contactos NA, 5A/250Vac, 2x105 maniobras - Histéresis 0,01…10,00%
Set point de desv.
± 300 digit
Activa Alta
Modo de
Set point de banda 0…300 digit
Tipo de
intervención
intervención Set point independiente de I. esc. a F. esc.
para loop
Activa Baja
AyB
Set point en Y1
0…100%
Funciones espec. Interrupción entrada X1 y X2 (sólo para termoelementos, 4…20mA, 1…5V)
Estado de seguridad
Salida
analógica
auxiliar Y6
(opción)
Set point
DATOS TÉCNICOS
Galvánic. aislada:
500Vac/1 min
Protegida de c.c.
12 bits (0.025%)
Tolerancia: 0.1%
Seguridad habilitada o no habilitada con contacto NA o NC
En corriente:
Retransmisión Medida X1 y X2
0-20mA, 4-20mA
Retransmisión Set point W1
750Ω/15V máx
En tensión:
Retransmisión Salida Y1 (canal ▲)
1-5V, 0-5V, 0-10V
Retransmisión Salida Y1 (canal ▼)
500Ω/20mA máx
Retransmisión error de 0 a 25% campo
Rampa de subida y bajada configurable en
digit/minuto entre 0.0…10.0% del campo
escala
Límites: inferior y superior configurables por
separado en el campo escala
Sólo Local
Local y 3 Memorizados
Sólo Remoto
Local y Remoto
Local y (Local + Remoto)
En corriente:
0-20mA, 4-20mA
Bias en unidades de ingeniería (-100% + 200%)
Set point
Ri = 30Ω
No
aislado
(compatible con las visualizaciones en la pantalla)
Remoto
En tensión:
Tolerancia 0.1%
Ratio de -9.99…+ 10.00
1-5V, 0-5V, 0-10V
Ri = 300 kΩ
Suma Set Local + Set Remoto
Método
de
"Frecuencia
natural",
con
lanzamiento
(One Shot) con régimen o en ocasión
Auto-tune
del cambio del Set point con índice de habilitación lanzamiento.
Coloc. Auto-Man Incorporada, con acción Bumpless
Conmutación desde teclado, entradas Lógicas, vía Serial
Tipo RS 485, protocolo Modbus-Jbus, 1200,2400,4800,9600 bits/seg.,
Com. Serial
(opción)
(lectura o lectura/escritura o modo local supervisor)
Alimentación
24 Vdc ± 10%, 50 mA máx
auxiliar
hasta con 2 transmisores externos (conexión 2, 3 o 4 hilos)
La salida de un campo o una anomalía en la línea de entrada
Entrada medida
(interrupción o cortocircuito) se visualiza y las salidas son
forzadas en seguridad
Valor de seguridad configurable:
Salida de
0…100%, -100…+100% (para doble acción)
Seguridad de regulación
Salidas auxiliares
Estado de seguridad configurable de los contactos: excluido, NA o NC
funcionamiento
Todos los valores de los parámetros y de la configuración se han conservado
para un tiempo illimitado en una memoria no volátil.
Parámetros
Se han subdividido en 4 grupos homogéneos configurables como:
visibles y modificables - visibles y no modificables - no visibles.
"Contraseña" para acceder al V° grupo de los parámetros,
Clave de acceso
a los parámetros de programación del Set point y a la configuración.
100…240V, 50/60 Hz, -15…+10% (250 Vac máx) o
16…28V, 50/60 Hz e 20…30Vdc
Alimentación
Potencia absorbida 5VA máx
EN61010, categoría de instalación 2 (2500V),
Seguridad
grado de contaminación 2
eléctrica
Características
Según las normas exigidas para la marca CE
Compatibilidad
generales
para sistemas y aparatos industriales
electromagnética
KWF según DIN 40040, temperatura amb. trabajo 0…50°C
Grupo climático
Bloque terminales IP 20, funda IP 30, Frontal IP54
Protección según
o IP67 con kit F10-435-2A101, material funda UL 94 V1
DIN40050
Dimensiones: 96 x 96 DIN, profundidad 154.5 mm, peso 0.8 kg aproximadamente
43
I
GARANTÍA
I
Los aparatos se garantizan exentes de
defectos de fabricación por un periodo de 1
año a partir de la instalación y para un máximo
de 18 meses a partir de la fecha de entrega.
La garantía no cubre los defectos ocasionados
por un uso diferente respecto al uso descrito
en estas instrucciones de uso.
Conformidad normas CE
Se declara que este aparato es conforme a
las normas sobre la compatibilidad
electromagnética para sistemas y aparatos
industriales y a las normas Seguridad eléctrica:
EN 50081-2 norma genérica sobre
emisiones
EN 50082-2 norma genérica
sobre la inmunidad.
EN 61010
norma genérica
Seguridad Eléctrica
44