CRYSTALLOGRAPHIC SYMMETRY OPERATIONS
Anuncio

CRYSTALLOGRAPHIC
SYMMETRY
OPERATIONS
Mois I. Aroyo
Universidad del Pais Vasco, Bilbao, Spain
miércoles, 9 de octubre de 13
SYMMETRY OPERATIONS
AND
THEIR MATRIX-COLUMN
PRESENTATION
miércoles, 9 de octubre de 13
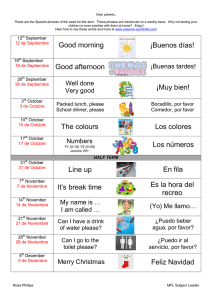
Mappings and symmetry operations
Definition: A mapping of a set A into a set B is a relation such that for each element a ∈A there is a
unique element b∈ B which is assigned to a. The element b is called the image of a.
!2
!1 and X
The relation of the point X to the points X
is not a mapping because the image point is not
uniquely defined (there are two image points).
The five regions of the set A (the triangle) are mapped
onto the five separated regions of the set B. No point of A
is mapped onto more than one image point. Region 2 is
mapped on a line, the points of the line are the images of
more than one point of A. Such a mapping is called a
projection.
miércoles, 9 de octubre de 13
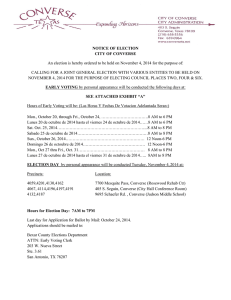
Mappings and symmetry operations
Definition: A mapping of a set A into a set B is a relation such that for each element a ∈A there is a
unique element b∈ B which is assigned to a. The element b is called the image of a.
An isometry leaves all distances and angles
invariant. An ‘isometry of the first kind’, preserving
the counter–clockwise sequence of the edges
‘short–middle–long’ of the triangle is displayed in
the upper mapping. An ‘isometry of the second
kind’, changing the counter–clockwise sequence of
the edges of the triangle to a clockwise one is seen
in the lower mapping.
A parallel shift of the triangle is called a
translation. Translations are special
isometries. They play a distinguished role in
crystallography.
miércoles, 9 de octubre de 13
Description of isometries
coordinate system:
isometry:
{O, a, b, c}
~
X
~ ~~
(x,y,z)
X
(x,y,z)
~
x = F1(x,y,z)
miércoles, 9 de octubre de 13
Matrix-column presentation of
isometries
linear/matrix
part
matrix-column
pair
miércoles, 9 de octubre de 13
translation
column part
Seitz symbol
Short-hand notation for the description
of isometries
isometry:
(W,w)
X
~
X
notation rules: -left-hand side: omitted
-coefficients 0, +1, -1
-different rows in one line
examples:
1/2
-1
0
1
-1
miércoles, 9 de octubre de 13
1/2
{
-x+1/2, y, -z+1/2
x+1/2, y, z+1/2
EXERCISES
Problem 2.19
Construct the matrix-column pair (W,w) of the
following coordinate triplets:
(1) x,y,z
(2) -x,y+1/2,-z+1/2
(3) -x,-y,-z
(4) x,-y+1/2, z+1/2
miércoles, 9 de octubre de 13
Combination of isometries
(U,u)
X
(W,w)
~
X
(V,v)
~
~
X
miércoles, 9 de octubre de 13
Inverse isometries
X
~
~
X
(W,w)
~
X
(C,c)=(W,w)-1
I = 3x3 identity matrix
(C,c)(W,w) = (I,o)
o = zero translation column
(C,c)(W,w) = (CW, Cw+c)
CW=I
-1
C=W
miércoles, 9 de octubre de 13
Cw+c=o
c=-Cw=-W-1w
Matrix formalism: 4x4 matrices
augmented
matrices:
point X −→ point X̃ :
miércoles, 9 de octubre de 13
4x4 matrices: general formulae
point X −→ point X̃ :
combination and inverse of isometries:
miércoles, 9 de octubre de 13
EXERCISES
Problem 2.19 (cont.)
Construct the (4x4) matrix-presentation of the
following coordinate triplets:
(1) x,y,z
(2) -x,y+1/2,-z+1/2
(3) -x,-y,-z
(4) x,-y+1/2, z+1/2
miércoles, 9 de octubre de 13
Crystallographic symmetry operations
Symmetry operations of an object
The isometries which map the object onto itself are called symmetry operations of this
object. The symmetry of the object is the set of all its symmetry operations.
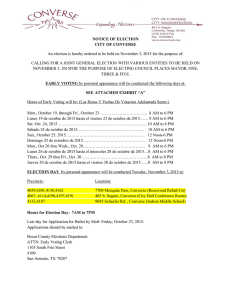
Crystallographic symmetry operations
If the object is a crystal pattern, representing a real crystal, its symmetry operations are
called crystallographic symmetry operations.
The equilateral triangle allows six symmetry
operations: rotations by 120 and 240 around its
centre, reflections through the three thick lines
intersecting the centre, and the identity operation.
miércoles, 9 de octubre de 13
Crystallographic symmetry operations
characteristics:
fixed points of isometries (W,w)Xf=Xf
geometric elements
Types of isometries preserve handedness
identity:
the whole space fixed
translation t:
no fixed point
rotation:
one line fixed
rotation axis
φ = k × 360 /N
no fixed point
screw axis
screw vector
screw rotation:
miércoles, 9 de octubre de 13
x̃ = x + t
◦
Crystallographic symmetry operations
miércoles, 9 de octubre de 13
Crystallographic symmetry operations
Screw rotation
n-fold rotation followed
by a fractional
p
translation n t parallel
to the rotation axis
Its application n times
results in a translation
parallel to the rotation
axis
miércoles, 9 de octubre de 13
do not
Types of isometries
preserve handedness
roto-inversion:
inversion:
reflection:
glide reflection:
miércoles, 9 de octubre de 13
centre of roto-inversion fixed
roto-inversion axis
centre of inversion fixed
plane fixed
reflection/mirror plane
no fixed point
glide plane
glide vector
Symmetry operations in 3D
Rotoinvertions
miércoles, 9 de octubre de 13
Symmetry operations in 3D
Rotoinvertions
miércoles, 9 de octubre de 13
Symmetry operations in 3D
Rotoinvertions
miércoles, 9 de octubre de 13
Crystallographic symmetry operations
Glide plane
reflection followed by a
fractional translation
1
t
parallel
to
the
plane
2
Its application 2 times
results in a translation
parallel to the plane
miércoles, 9 de octubre de 13
Matrix-column presentation of
some symmetry operations
Rotation or roto-inversion around the origin:
( )
( )
( )
W11
W12
W13
0
0
W21
W22
W23
0
0
W31
W32
W33
0
0
0
w1
x
x+w1
w2
y
w3
z
=
0
0
Translation:
1
1
1
=
y+w2
z+w3
Inversion through the origin:
-1
-1
-1
miércoles, 9 de octubre de 13
0
x
0
y
0
z
=
-x
-y
-z
Geometric meaning of (W , w )
W information
(a) type of isometry
order: Wn=I
rotation angle
miércoles, 9 de octubre de 13
EXERCISES
Problem 2.19 (cont.)
Determine the type and order of isometries that
are represented by the following matrix-column
pairs:
(1) x,y,z
(2) -x,y+1/2,-z+1/2
(4) x,-y+1/2, z+1/2
(3) -x,-y,-z
(a) type of isometry
miércoles, 9 de octubre de 13
Geometric meaning of (W , w )
W information
Texto
(b) axis or normal direction
(b1) rotations:
=
(b2) roto-inversions:
reflections:
miércoles, 9 de octubre de 13
:
EXERCISES
Problem 2.19 (cont)
Determine the rotation or rotoinversion axes (or
normals in case of reflections) of the following
symmetry operations
(2) -x,y+1/2,-z+1/2
rotations:
reflections:
miércoles, 9 de octubre de 13
(4) x,-y+1/2, z+1/2
Y(W) = Wk-1 + Wk-2 + ... + W + I
Y(-W) = - W + I
Geometric meaning of (W , w )
W information
(c) sense of rotation:
for rotations or
rotoinversions with k>2
det(Z):
x non-parallel to
miércoles, 9 de octubre de 13
Fixed points of isometries
solution:
point, line, plane or space
(W,w)Xf=Xf
no solution
Examples:
solution:
( )
( )
NO solution:
miércoles, 9 de octubre de 13
-1
0
0
0
x
0
1
0
0
y
0
0
-1
1/2
z
=
What are the
fixed
points of this
isometry?
x
y
z
-1
0
0
0
x
0
1
0
1/2
y
0
0
-1
1/2
z
=
x
y
z
Geometric meaning of (W,w)
(W,w)n=(I,t)
(W,w)n=(Wn,(Wn-1+...+ W+I)w) =(I,t)
(A) intrinsic translation part :
glide or screw
component
(A1) screw rotations:
=
(A2) glide reflections:
w
miércoles, 9 de octubre de 13
t/k
Glide or Screw component
(intrinsic translation part)
(W,w)k= (W,w). (W,w). ... .(W,w)=(I,t)
(W,w)k=(Wk,(Wk-1+...+ W+I)w) =(I,t)
screw rotations :
glide reflections:
miércoles, 9 de octubre de 13
t/k=1/k (Wk-1+...+ W+I)w
w
EXERCISES
Problem 2.20 (cont.)
Determine the intrinsic translation parts (if
relevant) of the following symmetry operations
(1) x,y,z
(3) -x,-y,-z
screw rotations:
glide reflections:
miércoles, 9 de octubre de 13
(2) -x,y+1/2,-z+1/2
(4) x,-y+1/2, z+1/2
t/k=1/k (Wk-1+...+ W+I)w
w
Fixed points of (W,w)
Location (fixed points xF ):
(B1) t/k = 0:
(B2) t/k ≠ 0:
miércoles, 9 de octubre de 13
EXERCISES
Problem 2.19 (cont.)
Determine the fixed points of the following
symmetry operations:
(1) x,y,z
(3) -x,-y,-z
fixed points:
miércoles, 9 de octubre de 13
(2) -x,y+1/2,-z+1/2
(4) x,-y+1/2, z+1/2
Space group P21/c (No. 14)
EXAMPLE
Matrix-column
presentation
Geometric
interpretation
miércoles, 9 de octubre de 13
c
.
w
w
w
miércoles, 9 de octubre de 13
y
r
e
.
t
s
u
h
s
.e
Crystallographic databases
Group-subgroup
relations
Structural utilities
Representations of
point and space groups
Solid-state applications
miércoles, 9 de octubre de 13
Crystallographic
Databases
International Tables for
Crystallography
miércoles, 9 de octubre de 13
EXERCISES
Problem 2.19
Construct the matrix-column pairs (W,w) of the
following coordinate triplets:
(1) x,y,z
(3) -x,-y,-z
(2) -x,y+1/2,-z+1/2
(4) x,-y+1/2, z+1/2
Characterize geometrically these matrix-column
pairs taking into account that they refer to a
monoclinic basis with unique axis b,
Use the program SYMMETRY OPERATIONS for the
geometric interpretation of the matrix-column pairs of
the symmetry operations.
miércoles, 9 de octubre de 13
Bilbao Crystallographic Server
Problem: Geometric
Interpretation of (W,w)
miércoles, 9 de octubre de 13
SYMMETRY
OPERATION
Problem 2.19
SOLUTION
(i)
(W,w)(1)=
1
0
1
0
1
(W,w)(3)=
-1
0
-1
(ii)
miércoles, 9 de octubre de 13
0
1
0
1/2
-1
0
0
-1
(W,w)(2)=
-1
(W,w)(4)=
1
1/2
0
-1
1/2
1
1/2
ITA description: under Symmetry operations
CO-ORDINATE
TRANSFORMATIONS
IN
CRYSTALLOGRAPHY
miércoles, 9 de octubre de 13
&
& &
& &
& &
They are briefly reviewed in
r
"
x
a
(
y
b
(
z
c"
The same point X is given with respect to a new coordinate system,
&
&
&
&
i.e. the new basis
vectors
a
,
b
,
c
and
the
new
origin
O
(Fig.
5.1. TRANSFORMATIONS
OF THEthe
COORDINATE
SYSTEM
In this section,
relations between
the primed and unprimed
5.1.3.1), by the position vector quantities are treated.
P ! Q"1 :
notation
& &
transformation !3-dimensional
(affine
transformation)
of the
space
r& " x& a& ( yThe
b ( general
z& c& "
$
!
$
'
'#
coordinate
system
consists
of
two
parts,
a
linear
part and a shift
a
a
are written in the following
'&
'# &
# borigin
In this section, the relations between
primed
andmatrix
of origin.theThe
#3 ! 3$
of
the
linear
#3 ! y,
1$ z)
bpart
! P #O:
!and the
(a,unprimed
b,Pc),
point
X(x,
c'
c'# the shift vector p,
column matrix p, containing the components
of
quantities are treated.
the transformation
by the symbol
The general transformationdefine
(affine
transformation)uniquely.
of the It is represented
(P,p)
These part
transformation
rules apply also to the quantities covariant
(P, p).
coordinate system consists of two
parts, a linear
and a shift
' ' '
, b , c and contravariant! with! !
with
respect
to
the
basis
vectors
a
!
!
!
of
Thespace
#3 ! 3$ matrix P of(i)theThe
linear
part
and
the
#3
!
1$
orsorigin.
of direct
(a
,
b
,
c
),
origin
O’: point
X(xorare, ythe, z )
linear
partto implies
a change
of orientation
or length
respect
a, b, c, which
are written
as column
matrices.
They
column
components
of the
p,direct space, [uvw], which are transformed
dices
of amatrix
planep,(orcontaining
a set of theboth
indices
ofshift
a direction
of the basis
vectors
a,vector
b, c, ini.e.
neral
affine
consisting
of a shiftItofisorigin
define
thetransformation,
transformation
uniquely.
represented
by& & &by the symbol
ect
space
or
the
coordinates
by
a shift
vector pTransformation
with components p1 and p2 and amatrix-column
change #a , b , c $ " #a, b,
pair
c$P! (P,p)
(P,
p).
#
# space
$
! $
reciprocal
m a, b to a , b . This implies a change in the coordinates of
#
#
&
u
u
# #
y.
rom(i)
x, yThe
to x , linear
#11
part implies a change of orientation or length or
#P
& !PQ12# vP&13!
v
rices:
$ #
'
(i) linear
change
of orientation
orb, length:
both of the basis
vectorspart:
a, b, c,
i.e.
w21 P22 wP23 (
" #a,
c$% P
es
of matrices
a pointofinP& direct
space
verse
and
& p& are needed. They are
#a , bspace
, c $ " #a, b, c$P
P31
P32 above,
P33 the components of a
ors of reciprocal
In
contrast
to
all
quantities
mentioned
#
&
Q ! P"1
thePcoordinates
of a point X in direct space
P11 P12 position
P13 vector
" #Pr11ora (
f a direction in direct space
21 b ( P31 c,
x, y, z '
depend also on the shift of the origin in direct space. The
$
nts of a shift vector from
P32 c,by
P12 a ( P22 b is(given
" #a, b, c$% P21 P22 general
P23 ((affine) transformation
& "1
he new origin
q!O
"P p!
! #P$13 a (!P23$b ( P33 c$"
P
P
P
31
32
33
x
x
nts
of of
anthe
inverse
origin
onsists
components
of
the
negative
shift
vector
&
" #%
" %
gintheOcoordinate
to origin
O, with
P
b
(
P
c,
y
!
Q
q
#
&
# yshift
& $ vector
b# , #P
c# , 11
i.e.a (
to
system
a# , "
31
For 21
a pure linear
transformation, the
p is zero and the
(ii)
shift
by
a
shift
vector
p(p
#1,p2,p3):
#
# origin
#
symbol
is
(P,
o).
z
z
q ! q1 a $ q2 b $ q3 c ! P12 a ( P22 b ( P32 c,
$
n part of a symmetry
The determinant of P, det#P$,!should
be
positive.
If
det#P$ is
x
$
Q
y
$
Q
z
$
q
Q
11
12
13
1
nsformation
(Q, q) is the inverse P
transformation
of
the
origin
O’
has
a
(
P
b
(
P
c$"
13
23
33
in direct space
negative,
a
right-handed
coordinate
system is transformed
"
% into a
# O
# #+ p
O’
=
x ,p
$ 3Q)22in
y $ Q23 z $ q2 &!
!(p
ng (Q, q) to the basis vectors a , b , c and the origin
#1Q,p
212
coordinates
left-handed
one
(or
vice
versa).
If
det#P$
"
0,
the new basis vectors
d
#4
!
1$
column
matrix
of
sis
a, b,
c withtransformation,
origin O are obtained.
Forvectors
a pure
linear
the
shift
vector
p
is
zero
and
the
Q31
x $system
Qa32 ycomplete
$ Q33 z $ qcoordinate
3
the
old
coordinate
#
#
are
linearly
dependent
and
do
not
form
es
of
a
point
in
direct
space
-dimensional
transformation
of
a
and
b
,
some
symbol is (P, o).
Q are
set de 13as follows: Qsystem.
and
miércoles,
9 de octubre
33 ! 1
Co-ordinate transformation
EXAMPLE
miércoles, 9 de octubre de 13
EXAMPLE
miércoles, 9 de octubre de 13
Transformation matrix-column pair (P,p)
(
(
(P,p)=
(P,p)-1=
miércoles, 9 de octubre de 13
1/2 1/2
-1/2 1/2
0 0
1
1
0
-1
1
0
)
)
0
0
1
1/2
1/4
0
0
0
1
-1/4
-3/4
0
Transformation of the coordinates of a point X(x,y,z):
(X’)=(P,p)-1(X)
=(P-1, -P-1p)(X)
x’
y’
z’
=
(
P11 P12 P13 p1
P21 P22 P23 p2
P31 P32 P33 p3
special cases
-origin shift (P=I):
-change of basis (p=o) :
Transformation of symmetry operations (W,w):
(W’,w’)=(P,p)-1(W,w)(P,p)
Transformation by (P,p) of the unit cell parameters:
metric tensor G:
miércoles, 9 de octubre de 13
G´=Pt G P
)
-1
x
y
z
Short-hand notation for the description
of transformation matrices
Transformation matrix:
(a,b,c), origin O
5.1. TRANSFORMATIONS OF THE COORDINATE SYSTEM
P ! Q"1 :
(
P11 P12 P13
(P,p)= P21 P22 P23
P31 covariant
P32 P33
These transformation rules apply also to the quantities
3.1. General affine transformation, consisting of a shift of origin
O to O# by a shift vector p with components p1 and p2 and a change
is from a, b to a# , b# . This implies a change in the coordinates of
int X from x, y to x# , y# .
!
$
! '# $
a'
a
'
# b & ! P # b'# &!
c'
c'#
with respect to the basis vectors a' , b' , c' and contravariant with
respect to a, b, c, which are written as column matrices. They are the
indices of a direction in direct space, [uvw], which are transformed
by
! #$
! $
u
u
# v# & ! Q# v &!
w#
w
p1
p2
p3
)
(a’,b’,c’), origin O’
-written by columns
In contrast to all quantities0,
mentioned
above,
the components of a
-coefficients
+1,
-1
notation
Q ! P rules:
position vector r or the coordinates of a point X in direct space
x, y, z depend also on the shift of the origin in direct space. The
-different
columns
general (affine) transformation
is given byin one line
q ! "P p!
! $
! $
x
x
-origin
shift
rix q consists of the components of the negative shift vector
" %
" %
# y & ! Q# y & $ q
refer to the coordinate system a , b , c , i.e.
the inverse matrices of P and p are needed. They are
"1
"1
#
#
#
#
#
z#
q ! q1 a# $ q2 b# $ q3 c# !
he transformation (Q, q) is the inverse transformation of
Applying (Q, q) to the basis vectors a# , b# , c# and the origin
1
-1
old basis vectors a, b, c with origin O are obtained.
#
#
a two-dimensional transformation of a and b , some
1
s of Q are set as follows: Q33 !11 and
Q23 ! Q31 ! Q32 ! 0.
quantities which transform in the same way as the basis
a, b, c are called covariant quantities and are written as row
. miércoles,
They are: 9 de octubre de 13
example:
-1/4
Example
-3/4
!
z
Q11 x $ Q12 y $ Q13 z $ q1
$
"
%
! # Q21 x $ Q22 y $ Q23 z $ q2 &!
{ a+b, -a+b, c;-1/4,-3/4,0
Q31 x $ Q32 y $ Q33 z $ q3
1If no shift
0 of origin is applied, i.e. p ! q ! o, the position vector
r of point X is transformed by
! $
! $
EXERCISES
Problem 2.20
The following matrix-column pairs (W,w) are
referred with respect to a basis (a,b,c):
(1) x,y,z
(3) -x,-y,-z
(2) -x,y+1/2,-z+1/2
(4) x,-y+1/2, z+1/2
Determine the corresponding matrix-column pairs
(W’,w’) with respect to the basis (a’,b’,c’)= (a,b,c)P,
with P=c,a,b.
Determine the coordinates X’ of a point X=
with respect to the new basis (a’,b’,c’).
0,70
0,31
0,95
miércoles, 9 de octubre de 13