- Ninguna Categoria
Influencia del par de orden superior pie
Anuncio
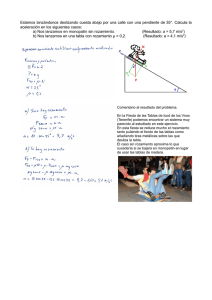
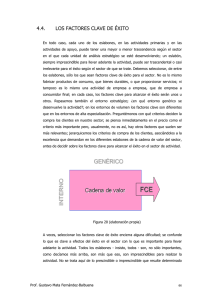
Asociación Española de Ingeniería Mecánica XVIII CONGRESO NACIONAL DE INGENIERÍA MECÁNICA Influencia del par de orden superior pie-suelo en la cinemática y dinámica del bípedo “PASIBOT” J.Meneses, E. Corral, H. Rubio, J.C. García-Prada Dpto. Ingeniería Mecánica, Grupo MaqLab. Universidad Carlos III de Madrid [email protected] Resumen En trabajos anteriores se presentó el bípedo “PASIBOT” y un primer estudio de su cinemática y dinámica [1], así como posibles estrategias de paso [2]. En estas primeras aproximaciones no se contemplaba el deslizamiento entre el pie y el suelo; además, se resolvía el problema dinámico inverso (determinación de las fuerzas y pares a partir de una cinemática o movimiento preestablecido), y se aplicaba al caso concreto del giro de la manivela motora a velocidad constante, lo que corresponde a un caminar en régimen estacionario. En este trabajo se aborda el problema dinámico directo (determinación del movimiento a partir de las fuerzas y pares actuantes) del bípedo, lo que posibilita el estudio de regímenes transitorios (arranques, paradas, etc.). Además, se contempla el deslizamiento entre el pie y el suelo. Se desarrolla un programa para el cálculo del movimiento del PASIBOT a partir del par motor, que permitirá, por ejemplo obtener el mínimo par necesario para el inicio del paso, desde una posición estática; y, en general, realizar el estudio dinámico del bípedo en régimen transitorio. Del análisis cinemático del mecanismo -basado en la unión de un mecanismo de Chevishev, un pantógrafo y un mecanismo estabilizador- se obtiene, en primer lugar, que la fase de doble apoyo representa una parte importante respecto a la de apoyo simple (aquella supone alrededor de 1/4 del tiempo de un paso completo); y en segundo lugar, que en dicha fase de apoyo doble, existe un movimiento relativo longitudinal entre ambos pies. Este movimiento relativo supone necesariamente un deslizamiento entre uno de los pies (o ambos) y el suelo. Además, no se debe descartar el deslizamiento entre el pie y el suelo en la fase de apoyo simple. En este trabajo, se estudia el deslizamiento pie-suelo, tanto en fase de apoyo simple como en fase de apoyo doble, perfeccionando así el análisis cinemático y dinámico del Pasibot expuesto en [1]. Para ello, se implementará el modelo en un programa de cálculo más complicado, pues no parte de una cinemática preestablecida, sino que ésta va generándose en cada instante de cálculo. INTRODUCCIÓN El desarrollo de robots humanoides es una de las líneas prioritarias de investigación en el campo de la robótica. Debido a este interés científico general en los robots humanoides y particularmente en los robots caminantes bípedos, existe una gran variedad de soluciones, con diseños muy afinados. Sin embargo, queda mucho por desarrollar, sobre todo en los temas relativos al peso y al consumo energético de los robots bípedos. La introducción de nuevos mecanismos o cadenas cinemáticas permite diseños de robots caminantes que aun manteniendo la misma funcionalidad que diseños anteriores, se reducen el número de actuadores y reductores, disminuyendo drásticamente el peso y el coste del robot. La mayoría de las soluciones propuestas en los robots bípedos actuales consisten en un diseño de una pierna similar a la humana, donde los eslabones son los fémures, las tibias o los pies, y las articulaciones (cadera, rodilla y tobillo) son operadas por actuadores (motores, dispositivos neumáticos, músculos artificiales, etc.). Hay otra línea de investigación que, sin embargo, apuesta por emular el movimiento del caminar con una combinación de mecanismos clásicos. Hay sillas caminantes que siguen esta filosofía [3, 4]. También los trabajos del profesor Ceccarelli y su equipo del Laboratory of Robotics and Mechatronic (LARM), han estado orientados en esta línea, primero con el robot bípedo EP-WaR II [5] y últimamente con los diseños de las piernas J.Meneses et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010) 2 del humanoide low-cost CALUMA [6] y otras propuestas [7]. Con esta misma filosofía ha estado trabajando el grupo MAQLAB, de la Universidad Carlos III de Madrid, diseñando y fabricando el robot bípedo PASIBOT [1], consistente en un sistema mecánico controlado, de un grado de libertad, capaz de emular el movimiento del paso humano, basándose en la combinación y adaptación de mecanismos clásicos. El objetivo principal de este trabajo es presentar un modelo de dinámica directa del bípedo PASIBOT que contemple el deslizamiento entre el pie y el suelo, tanto en la fase de apoyo simple como en la de apoyo doble. CINEMÁTICA DEL PASIBOT El bípedo PASIBOT fue presentado en [1] como la unión de tres mecanismos planos: un mecanismo de Chevishev generador de línea cuasi-recta, un pantógrafo y un mecanismo estabilizador, tal como se representa en la Fig. (1). Si no se contempla el deslizamiento entre el pie y el suelo durante la fase de apoyo simple, el bípedo puede considerarse un mecanismo desmodrómico: el estado de movimiento angular de la manivela motor (eslabón nº8 en Fig.1) determina la cinemática del resto de eslabones. De hecho, como se describe en [1], las coordenadas de posición del centro de masas xi e yi, así como la orientación i, del eslabón i se podían expresar en función de 8: (1) Donde el superíndice “pf” indica que pie de apoyo no desliza (“pie fijo”). Esto permite de manera relativamente sencilla, a partir de una cinemática preestablecida, calcular el par del motor y otros parámetros cineto-dinámicos de los elementos del bípedo en cada instante, a lo largo del paso. En ). [1] ya se mostraron resultados para una velocidad angular constante de la manivela motor ( 7. Biela 10. Estabilizador Guía 8 8. Manivela motor 9 1 7 9. Balancín 3. Fémur 11. cursor 3 12. Contrafémur 14. Cadera 5. Rodilla 6. Tendón superior 4. Tendón inferior 2. Tibia 13. Peroné y 1’. Pie en el aire x 1. Pie de apoyo 2 0. suelo x1 Fig. 1. Eslabones del Pasibot. Nomenclatura y coordenadas generalizadas 8 y x1. Los eslabones de la pata en el aire se designarán con el mismo número que sus homólogos de la pata de apoyo, pero con prima. El eslabón 8 es común a ambas patas (no existe 8’); lo mismo sucede con la cadera (eslabón 14). Influencia del par de orden superior pie-suelo en la cinemática y dinámica del bípedo “PASIBOT” 3 Si se contempla el deslizamiento longitudinal entre el pie y el suelo, el mecanismo pasa a tener un grado de libertad más, condicionado por el tipo de rozamiento (estático o dinámico) que impere en el instante considerado. En concreto, se puede expresar unívocamente la posición de todos los eslabones del sistema mediante las siguientes dos coordenadas independientes señaladas en la Fig. (1): 8, ángulo de la manivela motor; y x1, coordenada horizontal del centro de masas del pie de apoyo. En caso de deslizamiento del pie de apoyo (eslabón 1), las coordenadas de posición del eslabón i son: , (2) Las funciones son las que, en la Ec. (1), definían la posición del eslabón i en caso de , y pie de apoyo fijo. Nótese que las coordenadas vertical y angular de los eslabones son independientes del deslizamiento del pie de apoyo, éste sólo afecta a las coordenadas x. Puesto que el tiempo no aparece explícitamente en las Ec. (2) (la dependencia es implícita, a través de x1 y 8), la primera y segunda derivadas temporales de las coordenadas, se obtienen a partir de las correspondientes de x1 y 8: ; (3) ; ; Donde se ha utilizado el punto para designar la derivada temporal, y la coma para designar la derivada respecto a 8. Las derivadas primera y segunda respecto a 8 de las funciones definidas en la Ec. (2) son inmanejables analíticamente, por lo que se utilizarán las aproximaciones numéricas: ∆ ∆ ∆ (4) 2 2∆ Y expresiones similares para el resto de derivadas yi’(8), yi’’(8), i’(8) y i’’(8). DINÁMICA INVERSA DEL PASIBOT La dinámica inversa del PASIBOT tiene por objetivo el cálculo de las fuerzas entre eslabones y el par motor sobre la manivela necesarios para producir un movimiento determinado. En [1] se abordó la dinámica inversa para el movimiento en régimen estacionario de la manivela motor a velocidad angular constante, 8, a lo largo de un paso, y sin considerar deslizamiento entre el pie de apoyo y el suelo. En este caso, la cinemática de todos los eslabones quedaba completamente determinada por las Ec. (1), ya que el movimiento de la manivela motor era conocido: (5) Por tanto, se conocían las aceleraciones de los centros de masa de todos los eslabones, así como sus aceleraciones angulares en todo instante. En consecuencia, la dinámica del sistema quedaba reducida al siguiente sistema de ecuaciones: f ji f ik mi x pf i j i x k i x i 1,...,14,1',...7',9',...,13'. f jiy f ik y mi g mi yi k i j i T ji Tik rijx f jiy rij y f jix rik x f ik y rik y f ik x I ii j i k i j i i 2,...,10,12,13,14,1',...,7',9',10',12',13'. k i (6) Donde fij=( fjix,fjiy) es la fuerza que el esabón j ejerce sobre el i; Tji es el par que el eslabón j ejerce sobre el i (en el caso del PASIBOT, despreciando la fricción en las articulaciones, sólo existirá par entre los eslabones cadera y manivela motor, T14,8=-T8,14 T8); rij =( rjix,rjiy) es el vector de posición del punto de aplicación de la fuerza fij J.Meneses et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010) 4 (generalmente la articulación i-j) respecto del centro de masas del eslabón i; y mi e Ii son, respectivamente, la masa del eslabón i y el momento de inercia del mismo respecto a su centro de masa. La ecuación de momentos del pie de apoyo (eslabón 1), no incluida en el sistema de Ec. (6), se puede utilizar posteriormente para calcular la posición del “Zero Moment Point” (ZMP), r10x, en cada instante, y determinar si en dicho instante, el bípedo vuelca (el ZMP se sitúa sobre la frontera de la zona de contacto pie-suelo o es exterior a ella). Tampoco figuran las ecuaciones de momentos para los eslabones 11 y 11’, que se consideran puntuales, pues éstos son los cursores de pequeño tamaño que deslizan por las guías de la cadera. En la Ec. (6) se han agrupado en el primer miembro las incógnitas, y en el segundo, los términos independientes, que son conocidos. El sistema es lineal en las fuerzas y pares, y se puede expresar de forma matricial como: a11 a 21 a73,1 a12 a22 a73, 2 f 01x 0 f 01y m1 g a1,73 f12 m x pf x 2 2 a 2,73 f12 y · m2 g m2 y2 I 22 a73,73 T8 I14'14' f 10',12' y (7) A(coeficientes)· F ( fuerzas) I (inercias) F A1·I Así, las fuerzas entre eslabones y el par aplicado se obtienen como la matriz columna resultado de multiplicar la inversa de la matriz de coeficientes por la matriz columna de inercias. Para realizar el estudio dinámico del paso completo, se programó una aplicación en Matlab que ejecuta una discretización temporal. El programa toma, para cada instante, los valores de las aceleraciones de los centros de masa de cada eslabón, los vectores de posición, rij, de las articulaciones respecto de éstos, y realiza el cálculo expuesto en la Ec. (7). De esta forma se obtiene, en función del tiempo, el valor de todas las fuerzas internas y el par aplicado sobre la manivela motor [1]. Deslizamiento del pie de apoyo sobre el suelo Para contemplar el posible deslizamiento del pie de apoyo, el programa debe considerar la aceleración del mismo y efectuar una bifurcación condicional: básicamente, se supone inicialmente que no hay deslizamiento ( 0), se resuelve el sistema de “rozamiento estático”, Ec. (7), se obtienen los valores de f01x (fuerza de rozamiento) y f01y (fuerza normal), y se evalúa la condición de rozamiento estático: (8) Si es verdadera, se incrementa el tiempo en t y se vuelve a calcular la solución de la Ec. (7) con los valores de rij, , , que corresponda, cerrándose el bucle “rozamiento estático”. Pero si es falsa, el pie de apoyo entra en situación de “deslizamiento inminente” y se ha de resolver un sistema diferente, en el que su aceleración no es nula ( 0), sino que pasa a ser incógnita. Además, hay que añadir la relación entre las componentes normal y tangencial de la fuerza suelo-pie correspondiente al caso de rozamiento dinámico: (9) Así, la matriz de coeficientes para el caso de deslizamiento, se obtiene de la anterior (Ec. 7) añadiendo una columna de elementos mi en las posiciones correspondientes a las componentes horizontales de las fuerzas (de acuerdo con la primera de las Ec. (2)), ceros en el resto; y una fila que da cuenta de la Ec. (9): Influencia del par de orden superior pie-suelo en la cinemática y dinámica del bípedo “PASIBOT” a11 a 21 a31 a73,1 1 a12 a1,73 a 22 a2,73 a32 a3,73 a73, 2 a73,73 d 0 f 01x 0 f 01y m1 m g 1 f 0 12 x m2 x pf 2 f m2 12 y m2 g m2 y2 · I 22 T 8 0 I13'13' 0 f10',12' y 0 x1 5 (10) A(coeficientes)· F (incógnitas) I (inercias) F A1·I Más adelante se concretará el signo de la fuerza de rozamiento que ejerce el suelo sobre el pie, f01x. Una vez resuelto el sistema de la Ec. (10), el programa proporciona el valor de la aceleración con la que el pie de apoyo ha comenzado a deslizar, , y supone que en el intervalo de tiempo considerado (de (n1)t a nt), el pie evoluciona con dicha aceleración uniforme, con lo que se actualizan los valores de posición, velocidad y aceleración de los centros de masa del eslabón 1 y del resto de eslabones, para el final del intervalo: constante en ∆t 1 ∆ ∆ ∆ 1 ∆ ∆ 1 ∆ ∆ ∆ (11) ∆ 1 ∆ Tras el cálculo anterior, el programa almacena los datos de las fuerzas, el par y el movimiento de los eslabones, se incrementa el tiempo en t, y se vuelve a resolver el sistema de la Ec. (10). Una vez que el pie de apoyo se encuentra deslizando existirá una fuerza de rozamiento opuesta a dicho deslizamiento, que puede llegar a detenerlo, pero nunca a cambiar el sentido del movimiento. Por ello, el programa calcula el tiempo de detención, td, Ec. (12), dada la aceleración calculada para el pie de apoyo, y lo compara con el incremento de tiempo de cálculo, t. (12) Si el tiempo de detención es negativo o superior al incremento de tiempo de cálculo, entonces el pie de apoyo sigue deslizando, pero si el tiempo de detención es positivo e inferior al incremento de tiempo de cálculo, entonces se debe considerar que el pie ha dejado de deslizar. En ese caso el programa actualiza posiciones y velocidades con el tiempo de detención y vuelve al principio, a resolver el caso de rozamiento estático de la Ec. (7). En la fig. (2) se expone un diagrama de flujo del programa. ROZAMIENTO ESTÁTICO Resolver Ec. (7), x 0 Almacenar datos Incrementar t SÍ: el pie no desliza f f NO: deslizamiento inminente ? NO: el pie se detiene 0 ó (A) ROZAMIENTO DINÁMICO 0 Resolver Ec. (10), x ∆ ? SÍ: el pie sigue deslizando Almacenar datos Incrementar t ROZAMIENTO DINÁMICO 0 Resolver Ec. (10), x (B) El pie está deslizando Fig. 2. Diagrama de flujo del programa para el cálculo de la dinámica inversa con deslizamiento pie-suelo. J.Meneses et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010) 6 Es importante señalar que cuando se resuelve el caso de “ROZAMIENTO DINÁMICO”, Ec. (10), tras la bifurcación “deslizamiento inminente” (punto A del diagrama de la Fig. 2), la fuerza de rozamiento que ejerce el suelo sobre el pie, f01x, tiene sentido contrario a la resultante horizontal del resto de fuerzas sobre el mismo, calculadas en el paso inmediatamente anterior (“ROZAMIENTO ESTÁTICO”). Sin embargo, cuando se resuelve el caso de “ROZAMIENTO DINÁMICO” en un instante en el que el pie ya está deslizando (punto B), la fuerza de rozamiento, f01x, tiene sentido contrario a la velocidad de deslizamiento del pie. Con esto queda aclarada la ambigüedad del de la Ec. (10). Las tareas “almacenar datos” comprenden, tanto el almacenamiento de las “incógnitas dinámicas” (fuerzas entre eslabones y par motor), como la actualización de las variables cinemáticas de los eslabones, según las Ec. (11). DINÁMICA DIRECTA DEL PASIBOT Si se pretende dar solución al problema dinámico directo, hay que sustituir las Ec. (3) y (4) en la Ec. (6). Se obtiene un sistema de ecuaciones en el que las derivadas temporales primera y segunda de8 son incógnitas, en tanto que el valor del par T8 es ahora dato. Para contemplar la posibilidad de deslizamiento del pie de apoyo, el valor de su aceleración horizontal, , también es una incógnita: ∑ ∑ ∑ ∑ ∑ 0 ∑ 0 ∑ 1, … , 14,1 , … , 7 , 9 , … , 13 . ∑ (13) 0 2, … , 10,12,13,14,1 , … , 7 , 9 10 , 12 , 13 . Este sistema tampoco incluye la ecuación de momentos para el pie de apoyo (dejaría de ser lineal por el término r10xf01y, en el que ambos factores son incógnitas). Igual que antes, una vez resuelto, se puede utilizar dicha ecuación para determinar la posición del ZMP, y si se produce vuelco. La aproximación numérica que se ha utilizado en este trabajo para resolver el sistema de ecuaciones diferenciales de la Ec. (13) consiste discretizar el tiempo, de forma que en cada paso temporal se resuelve un sistema lineal inhomogéneo, que tiene por incógnitas las fuerzas entre eslabones, fij=( fjix,fjiy), la aceleración angular de la manivela motora, , y la aceleración horizontal del pie de apoyo . En el cálculo de la dinámica directa, el par motor aplicado, T14,8=T8,14 T8, es un dato a introducir, que puede ser incluso una función del tiempo. En cuanto a la velocidad de la manivela motora, , también es conocida al resolver la Ec. (13), pues se 0 , y su valor se va actualizando después de cada paso temporal, de acuerdo con asigna un valor inicial, la aceleración angular encontrada: ∆ 1 ∆ ∆ (14) Así pues, en la expresión matricial del sistema a resolver, la matriz de coeficientes se obtiene de la de la Ec. (10) eliminando la columna que correspondía a los coeficientes del par motor, T8 (antes incógnita), y añadiendo una columna (la última) que corresponde a los coeficientes de la “aceleración angular de la manivela motor”, (ahora incógnita). Obsérvese que los dos últimos elementos de la matriz columna de incógnitas son la aceleración de deslizamiento del pie de apoyo y la aceleración angular de la manivela motor. Por su parte, el par motor aparecerá en la matriz columna de términos independientes: a11 a 21 a31 a 41 a 51 a73,1 1 a12 a 22 a1,72 a 2,72 a32 a3,72 a 42 a 4,72 a52 a 4,72 I8 a73, 2 a73,72 d 0 0 0 m2 x2pf ' 8 m2 y 2 ' 8 I 22 ' 8 I13'13' ' 8 m1 f 01x 0 0 f m g 01y 1 m2 2 f12 x m2 x 2pf ' ' 8 8 0 2 f 12 m2 g m2 y 2 ' ' 8 8 y 0 · I 22 ' ' 8 8 2 0 f10',12' T8 y 0 8 0 x 0 1 A(coeficientes)· F (incógnitas) I (terminos independientes) F A1·I (15) Influencia del par de orden superior pie-suelo en la cinemática y dinámica del bípedo “PASIBOT” 7 El programa de cálculo para la dinámica directa está basado en un diagrama de flujo idéntico al expuesto en la fig. (2), con las siguientes salvedades: En “ROZAMIENTO ESTÁTICO 0” se ha de resolver el sistema de la Ec. (15), en el que hay que eliminar las últimas fila y columna de la matriz de coeficientes, así como el último elemento de las matrices columna de incógnitas y de términos independientes. Llamaremos a este sistema “estático” Para los casos de “ROZAMIENTO DINÁMICO”, hay que resolver la Ec. (15) tal como está. Llamaremos a este sistema “dinámico” En “Almacenar datos”, se actualiza la cinemática del pie de apoyo con las Ec. (11), la posición y velocidad de la manivela motor con arreglo a la Ec. (14), así como la cinemática del resto de eslabones. Las derivadas primera y segunda respecto a 8 de las coordenadas xipf, yi y i, se calculan previamente utilizando las Ec. (4) y una discretización suficientemente fina del ángulo 8. El programa tendrá que tomar los valores correspondientes por interpolación. FASE DE DOBLE APOYO En esta sección se expone brevemente el diagrama de flujo básico que debe seguir el algoritmo para resolver el movimiento del PASIBOT en la fase en la que los dos pies están en contacto con el sue1o. Dicha fase no es desdeñable, pues supone un cuarto (en tiempo) del paso completo. Además, el análisis cinemático del mecanismo indica que, durante esa fase, existe un movimiento relativo longitudinal entre ambos pies, con lo que en un instante dado se puede dar sólo uno de los siguientes casos: a) El pie atrasado (eslabón 1) no desliza, el adelantado (eslabón 1’) sí. b) Ambos pies deslizan sobre el suelo. c) El pie atrasado desliza, el adelantado no El que se dé una situación u otra dependerá, en primera aproximación, del valor de la fuerza normal que ejerce el suelo sobre cada pie. Así, en el curso de la fase de doble apoyo, se sucederán (en el orden expuesto) las tres situaciones, pues la normal se va transfiriendo del pie atrasado (que inicialmente es el único en contacto con el suelo) al adelantado (que acaba soportando toda la normal, cuando el pie atrasado abandona el suelo). Los momentos en los que se produce un cambio de situación dependerán también del coeficiente de rozamiento entre el suelo y el pie: si éste es grande prevalecerán las situaciones a) y c) en detrimento de la b), y viceversa. Para la resolución de la dinámica directa de la fase de doble apoyo, hay que considerar dos incógnitas más: las fuerzas que ejerce el suelo sobre el pie adelantado, f01’x y f01’y (lo que supone dos columnas más en la matriz de coeficientes de la Ec. 15); y dos ecuaciones más (dos filas más en la matriz de coeficientes de la Ec. 15): una, es la ecuación de equilibrio vertical de fuerzas: , (16) y la otra, es la ecuación de rozamiento dinámico, que depende de la situación: a) Si el pie atrasado no desliza y el adelantado sí, se resuelve el “sistema estático” de la Ec. (15), junto con la ecuación de rozamiento dinámico para el pie adelantado: (17) b) Si ambos pies deslizan, se resuelve el “sistema dinámico” de la Ec. (15), junto con la ecuación de rozamiento dinámico para el pie adelantado, Ec. (17). c) Si el pie atrasado desliza y el adelantado no, se resuelve el caso a) permutando las etiquetas entre los pies (11’) En la Fig. (3) se expone el diagrama de flujo básico del algoritmo para la resolución de la dinámica directa de la fase de doble apoyo J.Meneses et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010) Almacenar datos Incrementar t 8 Resolver a) Situación a) Sí f f ? No Resolver c) Situación c) Sí f f ? No Resolver b) Situación b) Fig. 3. Diagrama de flujo del programa para el cálculo de la dinámica en fase de apoyo doble, con deslizamiento entre los pies y el suelo. CONCLUSIONES Y TRABAJOS FUTUROS En este trabajo se ha presentado un modelo cinemático y dinámico del bípedo “PASIBOT” que contempla el deslizamiento entre el pie de apoyo y el suelo. Con este modelo se ha generado un algoritmo para calcular la dinámica directa del bípedo en fase de apoyo simple y se está generando el correspondiente a la fase de apoyo doble. Con ayuda de estos programas se podrá resolver el movimiento del “PASIBOT” en regímenes transitorios, y para los que el par motor sea cualquier función temporal. Además, el programa calcula la posición del ZMP y las posibles situaciones de vuelco. REFERENCIAS [1] J. Meneses, H. Rubio, C. Castejón, E. Ottaviano, M. Ceccarelli, J.C. García-Prada, Modelo cinemático del robot bípedo “PASIBOT”, IX Congreso Iberoamericano de Ingeniería Mecánica (2009). [2] H. Rubio, J. Meneses, C. Castejón, A. Jardón, A. Giménez, J.C. García-Prada, Mechanical design of walking robot “PASIBOT”. Parametric model and gait analysis, 12th International Conference on Climbing and Walking Robots (CLAWAR). Istambul, Turkey (2009). [3] Y. Hu, H. Nakamura, Y. Takeda, M. Higuchi, K. Sugimoto, Development of a Power Assist System of a Walking Chair Based on Human Arm Characteristics, Journal of Advanced Mechanical Design, Systems and Manufacturing. Vol. 1. nº 1. 141-154. 2007. [4] Y. Sugahara, A. Ohta, K. Hashimoto, H. Sunazuka, M. Kawase, C. Tanaka, Hun-ok Lim, A. Takanishi, Walking up and down stairs carrying a human by a biped locomotor with parallel (IROS 2005). 1489-1494. (2005). [5] G. Figliolini and M. Ceccarelli, Walking programming for an electropneumatic biped robot, Mechatronics, 9 (1999), 941-964. [6] N. E. Nava , G. Carbone and M. Ceccarelli, Design Evolution of Low-Cost Humanoid Robot CALUMA, 12th IFToMM World Congress, Besançon (France), June18-21, (2007). [7] Tavolieri C., Ottaviano E., Ceccarelli M., Di Rienzo A., Analysis and Design of a 1-DOF Leg for Walking Machines, Proceedings of RAAD’06, 15th International Workshop on Robotics in Alpe-Adria-Danube Region, Balantonfured, (2006).
 0
0
Anuncio



Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados