Modulo 1
Anuncio

1
Mi Comunidad, Nuestra Tierra: Geografía para el Desarrollo
Sostenible (MyCOE)
Taller: Introducción a Aplicaciones de Técnicas Espaciales para la
Conservación de la Biodiversidad
Universidad Tecnológica de Panamá
Ciudad de Panamá. 28 de enero a 1ro de febrero, 2008
MODULO: INTRODUCCION AL MODELAMINETO CARTOGRAFICO
PARA PLANIFICACION PARA LA CONSERVACIÓN DE LA
BIODIVERSIDAD
Preparado por: Rodrigo Sierra, Ph.D.
TABLA DE CONTENIDOS
Titulo
1. OBJETIVOS DEL TALLER
2. OBJETIVOS DEL MODULO
General
Específicos
3. ESTRUCTURAS DE DATOS GEOGRAFICOS EN UN SIG
Niveles de Información
Modelos de datos espaciales o geográficos
Modelo de datos en RASTER
Modelo de datos en VECTOR
Estructura Arco-nodo
Estructura relacional
Estructura OBJETO
Ventajas y limitaciones de las estructuras de Vector y Raster
4. DATUM, PROYECCIONES Y SISTEMAS DE COORDENADAS
5. PRINCIPIOS DE MODELAMIENTO EN RASTER
El Modelo Cartográfico
Aplicaciones Descriptivas y Prescriptivas
Introducción a manipulaciones con Álgebra de Mapas
Operadores
Funciones Espaciales
Funciones Locales
Funciones de vecindad
Funciones en bloque
Funciones zonales
Funciones globales
Página
1
2
2
2
2
2
3
3
5
5
5
6
6
7
9
9
9
10
10
10
11
12
13
14
14
1. OBJETIVOS DEL TALLER
Introducir a profesionales y académicos interesados en conservación de la
biodiversidad a herramientas y teorías espaciales aplicables a la planificación para su
conservación. Las actividades presentadas se basan en el uso de sistemas de
información geográfica (SIG) y su capacidad de compartir información y procesos con
2
otras herramientas relacionadas (procesadores de información remota, paquetes de
estadística espacial, sistemas de posicionamiento global, hojas de cálculo, etc.). Al
final del taller se espera que los participantes estarán familiarizados con estas
herramientas, podrán implementar modelos de decisión e identificar soluciones a
problemas básicos de planificación. Este es el punto de partida para el diseño e
implementación de programas más complejos.
2. OBJETIVOS DEL MODULO
General
Dar una introducción al modelamiento cartográfico para planificación para la
conservación de la biodiversidad.
Específicos
•
Describir y demostrar las características y estructura de datos espaciales.
• Proveer de los elementos técnicos y teóricos necesarios para diseñar e
implementar modelos cartográficos básicos.
2. ESTRUCTURAS DE DATOS GEOGRAFICOS EN UN SIG
Niveles de Información
Es importante diferenciar los distintos tipos de variables que pueden ser almacenadas en
cualquier sistema de información. El tipo, o nivel, de la variable define el tipo de
procedimientos, transformación y cálculos que se pueden hacer con estas (Tabla 1).
Las computadoras u ordenadores no distinguen entre estos niveles y por lo tanto el
investigador o usuario debe aplicar las reglas respectivas en base a su propia interpretación de
qué es válido y qué no es. Variables nominales que corresponden a un nombre, por ejemplo de
categoría, clase, grupo, no reflejan ningún orden específico. Por ejemplo, categorías de uso del
3
suelo, tipos de vegetación, tipos de suelo. Variables ordinales son listas de clases discretas,
pero con un cierto orden. Por ejemplo, tipos de carreteras (de primer orden, de segundo orden,
de tercer orden) o niveles de educación (primaria, secundaria, universitario, post-grado). Las
variables ordinales muestran clases discretas con una secuencia natural. Variables de intervalo
también tienen una secuencia natural pero, además, las distancias entre los valores tienen un
significado. Por ejemplo, temperatura medida en grados centígrados es una variable de
intervalo pues la distancia entre 10 °C y 20 °C es la misma que la distancia entre 20 °C y 30
°C. Una limitación muy importante, sin embargo, es que no existe un cero único y las tasas
(ratios) cambian dependiendo de la escala que se use, por ejemplo Fahrenheit o Celsius. Por
ejemplo, grados Celsius tienen un cero arbitrario (i.e., el punto de congelación del agua) pero
este no es el mismo que en Kelvin, y por lo tanto relaciones con temperatura u otras variables
no son comparables. Finalmente, variables relaciónales o de relación tienen las mismas
características que las variables de intervalo pero, además, tienen un cero natural o un punto
común de partida. Las tasas (ratios) no cambian dependiendo de la escala que se use, por
ejemplo pies y metros. Algunos ejemplos típicos de variables de relación son: ingreso per
cápita, precipitación mensual, temperatura mensual.
Modelos de datos espaciales o geográficos
Estos cuatro niveles de datos son organizados en un SIG para almacenar y manipular dos
tipos de información: espacial (ubicación) y no espacial (atributos). Desde el punto de vista de
un SIG, la información esencial que se necesita almacenar es la ubicación espacial en la Tierra
(¡.e. valores como longitud y latitud, que es la mas simple forma de información espacial). La
segunda forma de información se refiere a los atributos o características de los objetos que
están siendo estudiados. Por ejemplo: elevación, nombre, características físicas, tipo de
vegetación, etc. En general, los modelos de información espacial dentro de un SIG son de tipo
híbrido, es decir, una combinación entre información espacial y no espacial. La opción de
escoger una estructura de datos espaciales en particular depende de las necesidades iniciales del
proyecto en el SIG.
Modelo de datos en RASTER
Una de las estructuras de datos más simples es el RASTER u organización celular de datos
espaciales. En RASTER, el espacio es discreto. Las unidades de ubicación saltan de una forma
regular y los espacios intermedios no pueden ser representados. La información es generada para
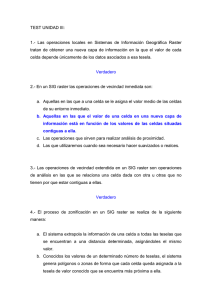
cada celda de un arreglo de celdas (frecuentemente regular) en el espacio. Las figuras geométricas
que cubren una superficie plana, como la estructura cuadrangular del raster, se llaman taselados o
mosaicos (tessellations). Triángulos y hexágonos son otros dos tipos de taselados de un plano como
bases de estructuras de bases de datos espaciales (Figura 1). Ha habido mucho interés en la
estructura hexagonal principalmente pues los hexágonos vecinos son equidistantes lo que no sucede
con la estructura cuadrangular (Burt, 1980). Sin embargo, el uso de estructuras de datos triangulares
o hexagonales originan dos problemas significativos. Primero, las celdas no pueden ser
repetidamente subdivididas en celdas más pequeñas de exactamente igual forma que las originales,
como es el caso de las celdas cuadrangulares. Un segundo inconveniente es que el sistema de
numeración para un sistema hexagonal es más complejo que el de un sistema cuadrangular.
a
a
b
c
Figura 1: Taselados de un plano: a) Cuadrangular, b) Triangular, c) Hexagonal
La dimensión horizontal de un RASTER a lo largo de las filas del arreglo, es orientada de
4
izquierda a derecha por conveniencia, siguiendo la práctica convencional en procesamiento de
imágenes. Las posiciones en la dirección vertical alineadas con las columnas del arreglo son
comúnmente enumeradas comenzando por el borde superior. Por consiguiente, el origen de un
raster es frecuentemente la esquina superior izquierda.
Dos limitaciones importantes existen sin embargo en la estructura raster. La primera se
refiere a que, debido a la estructura misma de las celdas, es complicado definir una ubicación
específica o exacta. En otras palabras, la habilidad para determinar una ubicación en el espacio
está limitada por el tamaño de la celda del raster. Por consiguiente existe un límite a la
especificidad geográfica. Hay dos importantes interpretaciones teóricas del valor de la celda en la
estructura raster. El valor de la celda puede representar un único valor medido en el centro de esa
celda, o puede representar un promedio, media, mediana, máximo, mínimo, suma, etc., del área
representada por la celda o del área que incluye a sus vecinos.
La segunda limitación se refiere a la dificultad de definir relaciones con celdas contiguas o
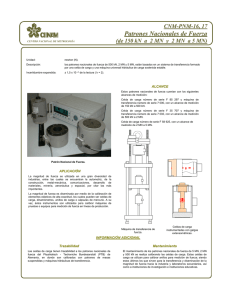
adjuntas. Por ejemplo consideremos el siguiente ejemplo (Figura 2).
Figura 2. Vecindarios espaciales y distancia: Cuatro celdas vecinas, Ocho celdas vecinas
Consideremos la celda central. Las celdas de arriba y abajo están a una unidad de distancia de la
celda central, mientras que las celdas en la diagonal están aproximadamente a 1.41 (raíz cuadrada
de dos) unidades de distancia del centro. Para las búsquedas dentro de los datos, si incluimos
solamente las celdas arriba y debajo de la celda de interés, estamos trabajando con un vecindario
de 4 celdas (Figura 1 a) y todas las celdas son equidistantes de sus vecinos. Asi, las celdas vecinas
están compartiendo un borde. Si incluimos los elementos en la diagonal, estamos en un
vecindario de 8 celdas y ahora las celdas no están igualmente espaciadas. En este último caso,
algunas celdas vecinas comparten, en unos casos, un borde y, en otros, un vértice (VÉRTEX).
Como todas las celdas en estos dos ejemplos tienen vecinos de la misma forma y tamaño,
decimos que tenemos similaridad espacial de vecindad (Tobler, 1979).
El tamaño de una celda en un set de datos puede
confundirse con la unidad mínima de mapeo (i.e., el elemento
más pequeño a ser representado). Sin embargo, el tamaño de la
celda de un raster y la unidad mínima de mapeo no son lo
mismo. Escoger una apropiada mínima unidad de mapeo para
un estudio es una decisión muy importante que tomar en la fase
de diseño del proyecto. Una regla informal conveniente, basada
en la teoría de muestreo (sampling theory) es usar un tamaño de
celda la mitad del largo (o un cuarto del área ya que las celdas
son bidimensionales) del elemento más pequeño que se desea
mapear. Una sugerencia más conservadora es usar un tamaño de
celda un tercio o un cuarto del tamaño del largo del elemento
más pequeño que se desea mapear. Ejemplos de formato
RASTER: ESRI GRIDs, TIF, JPG, BMP, IMG, SUN RASTER.
5
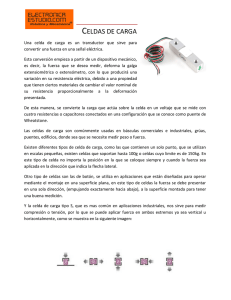
Figura 3. Modelo “run length”
Las estructuras de raster son relativamente simples. Las diferencia más importantes entre los
varios tipos de estructuras raster es la forma en que los datos son almacenados y específicamente
la estrategia para reducir redundancia. Por ejemplo, los raster más sencillos almacenan
información por línea usando códigos para reducir y simplificar la base de datos necesaria (Figura
3). Otros sistemas, como el quadtree usado por el sistema SPANS, son más complejos.
Modelo de datos en VECTOR
Para datos espaciales, en la mayoría de SIG, los datos de coordenadas están incluidos y
almacenados como una combinación de puntos, líneas y polígonos (Males, 1977, Peucker and
Chrisman, 1975). Los puntos están definidos en términos de su ubicación geográfica
(coordenadas X Y). Líneas (o arcos) están construidas por tablas que referencian a los puntos que
las constituyen. Los áreas (o polígonos) están definidos por líneas. Generalmente, las lineas y
áreas no contienen coordenadas X Y independientes. La relación matemática entre puntos, líneas
y polígonos se denomina TOPOLOGÍA. El modelo vector está basado en un espacio continuo, es
decir que cualquier ubicación es posible de ser medida con precisión. Muchos sistemas de
computación y sistemas de diseño asistido por computadora (computer-aided-design - CAD) usan
modelos vector para la organización interna de datos, usando primitivos como puntos, líneas, y
círculos.
El modelo vector es usualmente usado para representar elementos discretos en el espacio. Es
decir pueden existir vacíos de información entre objetos. El modelo vector es usualmente usado
para representar variables socioeconómicas dentro de áreas administrativas previamente
definidas. Elementos naturales como ríos, lagos, bosques también pueden ser representados por
este modelo. Ejemplos de formatos vector: Coberturas de Arc_info, Shapefiles, DGN, DWG,
DXF, DLG, TIGER
Estructura Arco-nodo
En la estructura arco-nodo, los
objetos en la base de datos son
estructurados jerárquicamente. En este
sistema, los puntos son los elementos
básicos. Los arcos son segmentos de
líneas individuales definidos por una
serie de pares de coordenadas X Y
(Figura 4). Los nodos son las
finalizaciones de los arcos y forman las
intersecciones entre arcos. Polígonos
son áreas totalmente encerradas entre
arcos. Así, los nodos son compartidos
tanto por arcos como por polígonos Figura 4. Estructura arco-nodo.
contiguos (Peucker y Chrisman, 1975).
La estructura Arco-nodo nos permite codificar la geometría de los datos sin redundancia. Los
puntos son almacenados una sola vez y son reusados tantas veces como fuese necesario.
Estructura relacional
Otra forma de organización Arco-nodo es algunas veces denominada estructura relacional de
datos. En la última estructura, los valores de los atributos de los datos eran almacenados
juntamente con información topológica. En una estructura de datos relacional, los atributos son
almacenados y mantenidos separadamente. Esta estrategia ha sido muy popular en los SIG
comerciales (e.g. Arc-lnfo, ArcMap, ArcGIS). Los atributos son almacenados en bases de datos
relaciónales (e.g., Tablas Info, tablas DBF). Estas tablas son simples: una fila en la tabla
6
representa a un solo elemento, y las columnas representan los diferentes campos o atributos. Un
identificador único relaciona los datos espaciales con los datos alfanuméricos. Una de las tablas
relaciónales mantiene la información sobre los atributos de los puntos o nodos en una base de
datos espacial.
Estructura OBJETO
La estructura OBJECTO se basa en la presuposición que las entidades en el mundo real que
esta siendo modelado pueden ser agrupadas dentro del clases de objetos. Los objetos de mundo
real (OMR) son abstraídos como objetos con comportamiento y estado. Comportamiento se
refiere a como el objeto reacciona a ciertas reglas de decisión. En base a estas reglas el objeto se
comporta de cierta manera que influye en su estado final (e.g. si A entonces el objeto pasa a un
estado X). Estado se refiere a las condiciones iniciales del objeto antes y después de aplicar las
reglas de decisión (e.g. abierto o cerrado, prendido o apagado, en movimiento o parado). Cada
objeto tiene un único identificador. La clase a la que cada objeto pertenece define que valores ese
objeto puede tener, Por ejemplo un "edificio" puede tener "dirección", "número de pisos", y
"ubicación espacial". Los objetos pueden tener conexiones con otros objetos. El conjunto de
conexiones entre objetos se denomina estructura.
Un SIG orientado a objetos puede proveer tipos de especialidades como geometrías, rasters,
tablas, polígonos, puntos, líneas. Un objeto puede tener una estructura raster o vector, las dos, o
ninguna de las dos. El modelamiento por objetos puede proveer una integración natural entre las
estructuras RASTER y VECTOR. Además no existe una distinción entre geometría y atributo. La
geometría es un atributo más del objeto modelado. Por consiguiente hay un cambio conceptual en
la forma de modelaje. El modelamiento es centrado en los objetos mas no en la geometría. Por lo
tanto un objeto puede tener varias geometrías (Woodsford, 2003)
Ventajas y limitaciones de las estructuras de Vector y Raster
Ventajas del modelo vector
•
•
•
•
•
•
Objetos espaciales son representados basándose en coordenadas precisas X e Y. Por
consiguiente las mediciones de áreas, perímetros y distancias, y la representación gráfica
es mas exacta y precisa.
La estructura es más compacta y menos redundante, y dependiendo del área de estudio y
el detalle, puede demandar menos espacio de almacenamiento.
A más de las propiedades geométricas, las relaciones topológicas entre objetos puede ser
explícitamente codificada y almacenada.
Soporta una gran variedad de análisis complejos basados en topología y bien
implementados para representar y modelar elementos lineares y redes como direcciones,
sistemas hidrológicos» flujos de transporte, análisis de mercado, oleoductos, trazados
viales, etc.
El uso de relaciones topológicas facilita la revisión de errores en la base de datos.
Facilita la sobreposición visual de capas de información.
Limitaciones del modelo vector
•
•
•
•
•
Compleja estructura de datos, y extensos períodos de tiempo para adquirir e ingresar
datos.
Requiere intensa labor computacional y presenta complicaciones en algunas operaciones
espaciales para hacer sobre imposiciones de mapas y análisis de vecindad.
No es adecuada para mostrar cambios graduales entre unidades adyancentes
No es adecuada para representar superficies continuas como relieve, pendientes, aspecto.
Es incompatible con datos colectados por sensores remotos.
Ventajas del modelo RASTER
7
•
•
•
Simple y directa estructura de datos en formas de matriz en dos dimensiones.
Soporta no solamente objetos discretos sino también continuos (superficies continuas)
Computacionalmente es más eficiente para ciertos tipos de análisis espaciales: álgebra de
mapas, modelamiento de superficies y simulaciones.
Es compatible con datos colectados por sensores remotos y datos fotogramétricos.
Compatible con dispositivos gráficos de entrada y salida de alta velocidad.
Desventajas del modelo RASTER
•
•
•
•
No es posible representar explícitamente relaciones topológicas por lo tanto no es posible
realizar análisis de redes.
Existe redundancia de datos en áreas homogéneas por lo tanto abarca un gran volumen de
datos.
Limitada precisión en la ubicación de elementos y en el cálculo de áreas y distancias.
La representación de objetos es menos estética ya que los bordes tienden a ser en forma
de gradas o bloques, en vez de líneas suavizadas.
4. DATUM, PROYECCIONES Y SISTEMAS DE COORDENADAS
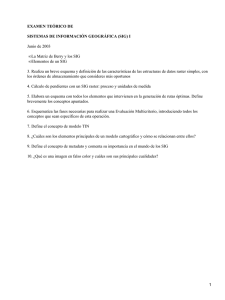
La forma de la Tierra es aproximadamente esférica y su forma particular es denominada Geoide, El
modelo matemático del Geoide se denomina elipsoide. Un elipsoide tiene un eje mayor, un eje menor y
una excentricidad (Figura 5). Existen diferentes elipsoides para la Tierra que se ajustan de mejor o peor
manera a la forma del Geoide de acuerdo a la ubicación del área de estudio. Los mapas no son más que
proyecciones del elipsoide en una superficie plana. Un datum define el sistema de referencia que describe
el tamaño y forma de la tierra. Hay cientos de datums diferentes han sido usados para enmarcar las
descripciones de posición desde los primeros intentos para estimar el tamaño de la Tierra por Aristóteles.
Verdaderos datums geodésicos fueron usados solamente después de 1700 cuando las mediciones y
observaciones de la tierra mostraron que el modelo matemático de la Tierra se aproximaba más a un
elipsoide que a un esferoide. Cada region tiene un datum especialmente apropiado para esa region. En
Ecuador, por ejemplo, el datum más usado es el Provisional South American Datum 1956 (PSAD56/La
Canoa Venezuela), con referencia vertical
en la Estación Mareográfica de la Libertad,
provincia del Guayas, con el Elipsoide
Internacional de 1924. El South American
Datum 1969 (SAD69) también ha sido
usado para el Ecuador con el elipsoide
GRS67. Sin embargo estos datums están
siendo trasladados a sistemas egocéntricos
(con la ayuda del Sistema de
Posicionamiento Global (en inglés GPS)
que pueden ser utilizados a nivel mundial
como el GRS80 o el WGS84.
Figura 5: Elipsoide WGS84 (Fuente: Clark 2003).
Existe un gran número de proyecciones cartográficas. La forma más común de ubicar puntos sobre la
tierra es el sistema geográfico o sistema de "longitud-latitud", en el cual los puntos son especificados en
términos de la desviación angular norte o sur de la línea ecuatorial (para derivar la latitud) y la desviación
angular a lo largo de la circunferencia de la Tierra en la línea ecuatorial (generalmente medida respecto al
meridiano de Greenwich, en Inglaterra) para derivar la longitud. Sin embargo la medición de áreas y
distancias en un sistema angular tiene muchas limitaciones en cuanto a la precisión y exactitud de las
medidas por lo tanto es necesario convertir estos valores angulares a un sistema de coordenadas planas o
cartesianas (Figuras 6a y 6b).
8
Figura 6a: Proyección geográfica
Figura 6b: Proyección cartesiana.
Las proyecciones están categorizadas de
distintas formas. El primer grupo de proyecciones
está basado en el modelo geométrico de la
proyección. En este grupo están las proyecciones
azimutales, cónicas y cilíndricas (Figura 7). En las
proyecciones azimutales el mapa está construido
ubicando un plano tangente al punto en la superficie
de la tierra. Los elementos del mapa son construidos
sistemáticamente transfiriendo la información del
elipsoide al plano. Las distorsiones son mínimas en
la vecindad inmediata al punto de tangencia e
incrementa conforme uno se aleja de este punto.
Estos mapas son generalmente usados para
navegación aérea y transmisión de radio. Las proyec Figura 7: Tipos de proyecciones.
ciones cónicas se basan en la colocación de un cono
sobre la Tierra, orientado de tal forma que la intersección del cono y la Tierra forma uno o dos círculos
pequeños. Estas proyecciones son usadas para representar grandes porciones de la tierra orientadas de
este-oeste (o viceversa) en los hemisferios norte y sur. Las proyecciones cilíndricas están basadas en la
colocación de un cilindro alrededor de la Tierra. El cilindro es tangente al elipsoide.
La proyección Universal Transversa
de Mercator (UTM) es la proyección
plana más conocida y es una
proyección cilíndrica. En este
sistema, la proyección es secante a la
superficie de la Tierra, para
balancear variaciones de escala
(Figura 6). El sistema UTM divide a
la superficie de la Tierra en 60 zonas
de 6 grados de longitud de ancho.
Cada zona es numerada y el centro
de cada zona se denomina Meridiano
Central. Conforme uno se aleja del
meridiano central se incrementa la
distorsión. Los bordes de las zonas
presentan las deformaciones más
altas por lo tanto usar una sola zona
para un área que cubra más de una Figura 7: Sistema de coordenadas UTM
zona es un inconveniente cuando se
9
necesitan hacer mediciones de áreas y distancias en forma precisa. Las localizaciones en la Tierra son
descritas en forma de Norte y Este, medidas en metros desde el origen de la zona UTM correspondiente.
Si el punto se encuentra en el hemisferio norte entonces el origen en el eje Norte_Sur (línea ecuatorial)
toma un valor de "O" y el eje Este-Oeste (meridiano central) toma un valor de "500.000". Si el punto se
encuentra en el hemisferio sur, el origen en le eje Norte-Sur toma un valor de "10'000.000" y el eje EsteOeste mantiene el valor de "500.000". Por esta razón el origen del eje Norte-Sur se denomina Falso Norte.
PRINCIPIOS DE MODELAMIENTO EN RASTER
El Modelo Cartográfico
Un modelo es una representación de la realidad. Representa un estado o un proceso. Generalmente
son una simplificación que requiere la selección de los elementos o procesos más importantes. Un modelo
cartográfico es un conjunto de operaciones ordenadas e interrelacionadas de mapas que actúan en datos
crudos, así como en datos intermedios o derivados, para estimular un proceso de toma de decisión
(Tomlin 1990, en DeMers, 1997). Un modelo cartográfico tiene las siguientes características:
• Es una secuencia lógica de operaciones analíticas expresadas en forma de diagramas de flujo.
(Figura 8)
• Generalmente codificada en macros (lenguaje de comandos)
.
• Los procesos mostrados son cíclicos
Figura 8. Ejemplo de diagrama de flujo representando un modelo cartográfico y sus reglas de decisión.
Tomlin (1990) introdujo el concepto de álgebra de mapas para la manipulación de mapas en formas
de capas de información espacial. Álgebra de mapas incluye una serie de funciones para realizar
operaciones comunes en un solo mapa o en una serie de mapas.
Aplicaciones Descriptivas y Prescriptivas
Las aplicaciones en SIG del modelo cartográfico pueden dividirse en dos grandes grupos: descriptivas
y prescriptivas.
Aplicaciones descriptivas:
10
Son descripciones simples en base a mapas de un espacio y sus características. Por ejemplo: Mapa de
uso actual y cobertura del suelo; mapa de suelos; mapa geomorfológico (Tabla 1).
Aplicaciones prescriptivas o predictivas:
Son aplicaciones que generalmente se basan en la combinación de diferentes tipos de información.
Estas aplicaciones están orientadas por una teoría para predecir o deducir un resultado. Por ejemplo:
Modelo de erosión del suelo, modelo de susceptibilidad de pendientes, modelo de vegetación. (Tabla
2)
Modelo Descriptivo
Modelo Prescriptivo o Predictivo
Describe Explica
Prescribe la mejor práctica o predice la
mejor solución
Ilustra condiciones existentes de fenómenos
preseleccionados presentando los resultados en u
forma que permita al usuario identificar que
elementos están ubicados en locaciones
específicas y como están asociados
Permite al usuario determinar que
factores son importantes para el
funcionamiento del área de estudio.
También permite al usuario determinar
como estos factores están asociados
entre sí espacialmente.
Tabla 2. Modelos descriptivo y prescriptivo
Introducción a manipulaciones con Álgebra de Mapas
A pesar de su estructura simple, álgebra de mapas es una forma robusta de modelaje espacial. Alguna
de sus formas es empleada en muchos paquetes de SIG como GRASS, ERDAS, ArcMap Spatialy
Analyst, ArcGIS Spatial Analyst, o Arclnfo GRID.
Operadores
Las características funcionales de un SIG basado en el lenguaje de modelamiento mediante
Álgebra de Mapas son los mismos operadores con los que operamos la mayoría de dominios de
modelamiento. Los operadores puedes clasificarse en diferentes grupos: aritméticos, relaciónales,
bitwise, boléanos (boolean), combinatorios, lógicos, acumulativos y de asignación (Tabla 3, Figura
9).
Grupo
Operador Operador Operador Operador Operador Operador
Aritmético
+
*
/
mod
Relacional
<
>
==
>=:
BitWise
»
«
...
Boleano
&&
!
Combinatorio
and
or
Lógico
And
Or
Not
Xnot
Acumulativo
"+ ="
M* =
". ="
Asignación
"="
Tabla 3. Ejemplos de operadores por grupos
Funciones Espaciales
Las funciones espaciales son operaciones de SIG de alto orden construidas de uno o más
operadores simples de los anteriormente mencionados y designados para proveer un vehículo para
la implementación del modelo (Figura 9). Las funciones están agrupadas en: locales, focales, de
bloque, zonales y globales. No todo SIG contiene estas funciones, pero la mayoría de SIGs con
capacidad de manipulación de raster contienen capacidades de lenguajes macro para implementar
estas funciones.
11
Funciones locales
Son aquellas operaciones que se aplican píxel
por píxel comparando cada celda individual de la
matriz con su correspondiente celda en una segunda
y sucesivas matrices. Los valores de la celda no se
ven afectados por sus vecinos pixeles (Figura 10).
Los operadores potenciales comúnmente aplicados
dentro de las funciones locales pueden ser agrupa
dos en seis categorías:
Figura 9. Operaciones en raster
Aritméticas: +, -, /, *
Trigonométricas: sin, eos, tan, etc
Exponenciales y logarítmicas: exp, explO, log, Iog10,
sqrt, pow, etc
Reclasificación: Reclass (renumber)
Selección: select, selectcircle
Estadísticas: min, mean, majority, sum, max, etc
Otras: abs, random, ceil, etc.
En ArcMap, éstas funciones se encuentran en el modulo
Spatial Analyst en distintos sitios. Funciones aritméticas,
trigonométricas, exponenciales y logarítmicas se encuentran
dentro de Map Calculator. La función de reclasificación se
denomina RECLASSIFY. La función de selección se
denomina MAP QUERY en el mismo menú. Las funciones
estadísticas locales se las opera mediante CELL
STATISTICS en el mismo menú o mediante lenguaje macro
en Map Calculator usando la siguiente sintaxis:
Figura 10. Funciones locales
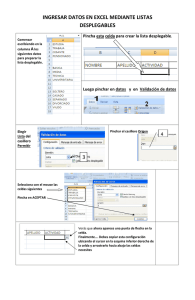
INGRID OPERACIÓN INGRID
OPERACION(INGRID1, CONDICION, CONDICION)
En donde:
INGRID = Es el archivo raster en el que ejecutará la operación
OPERACION = Cualquier tipo de operación: suma, media, desviación estándar, mínimo.
CONDICION= Parámetros necesarios o lista de los archivos raster que serán analizados
separados por comas.
Cualquier tipo de operación matemática se incluye en esta categoría. Por ejemplo:
X3=
Esta operación seria expresada como:
INGRID*3
El resultado es un nuevo mapa (raster) con los valores resultantes.
12
NOTA: Cada manipulación de
datos genera un nuevo mapa. En
ArcMap el default es un mapa
provisional (debe ser grabado con
un nombre permanente).
Una funcion especialmente util es la de tabulacion de
areas que crea una tabla de
contingencia. La tabla de
contingencias presenta un conteo
de todas las combinaciones
encontradas entre dos mapas
(Figura 11).
Figura 11. Analisis de contingencia (Crostabulacion de mapas)
Funciones de vecindad
Los análisis y funciones de vecindad toman en cuenta los valores digitales dentro de una
distancia definida de cada celda para asignar un valor de esa posición en un nuevo raster. Estas
operaciones también se denominan operaciones focales y pueden determinar un mínimo, máximo,
densidad, promedio, suma, etc., en base al análisis de los valores digitales de los píxeles vecinos a
una celda determinada. Dentro de estas funciones se encuentran también operaciones como
pendiente, aspecto. Cuando la operación se concluye para el primer grupo de celdas, la ventana de
tamaño m x n se mueve de izquierda a derecha y de píxel en píxel. Esto ocasiona que la ventana
analice las mismas celdas en repetidas ocasiones. Por ejemplo, en este caso el valor del píxel en el
medio depende de sus ocho vecinos más cercanos.
Funciones focales o de vecindad proveen una gran gama de posibles vecindarios para iniciar el
análisis. Algunas formas típicas de vecindarios son rectángulos, cuadrados, donuts (annulus), y cuñas
(wedges), cuyo tamaño también puede ser seleccionado (Figura 12).
Figura 12. Tipos de vecindades.
En ArcMap (Spatial Analyst) estas funciones pueden ser aplicadas mediante el menú
ANALYSIS en NEIGHBORHOOD STATISTICS o también escritas en lenguaje macro dentro de
Map Calculator. Los siguientes dos ejemplos muestran la sintaxis de funciones focales (en general)
para ArcMap Spatial Analyst:
Ejemplo 1:
FocalStats(INGRID, Operación, Tipo de vecindario, Celdas Sin Valor)
13
•
•
INGRID = El archivo raster en el que se va a ejecutar la función
Operación = Cualquier función estadística (suma, mayoría, promedio, máximo, mínimo,
etc), escrita de la siguiente forma:
• Tipo de vecindario: Especifica el tipo de vecindario y el tamaño del mismo. Los vecindarios
se especifican de la siguiente forma:
NbrHood.MakeAnnulus (radio interior, radio exterior, en unidades del mapa)
NbrHood.MakeCircle (radio, en unidades del mapa)
NbrHood.Makelrregular (lista)
NbrHood.MakeRectangle (ancho, largo, en unidades del mapa)
NbrHood.MakeWedge (radio, ángulo inicio, ángulo final, en unidades del mapa)
Si las unidades del mapa es TRUE el análisis toma en cuenta las unidades del mapa, si no se
toma en cuenta el número de celdas.
En Celdas Sin Valor se escribe TRUE si se desea tomar en cuenta las celdas sin valor (no
data) en los cálculos estadísticos. Si se escribe FALSE, no se toman en cuenta las celdas sin
valor en los cálculos (Este es el default).
Ejemplo 2:
Slope(<grid>, {DEGREE | PERCENTRISE})
Slope(<grid>, <z_factor>, {DEGREE | PERCENTRISE})
Funciones en bloque
Las operaciones en bloque son una variación de las operaciones de vecindad. La diferencia
radica en que éstas operan en el raster por bloques y no existe traslape entre las ventanas siendo
procesadas (Figura 13). En otras palabras, cuando la operación en un bloque de tamaño m x n
concluye, un nuevo grupo de celdas es analizado sin tomar en cuenta las celdas que fueron
analizadas previamente. Las operaciones en bloque NO CAMBIAN LA RESOLUCION. La
excepción a esta ultima regla es la función AGGREGATE, que combina los valores de las celdas en
base a una condición explicita requieriendo que el nuevo valor de la celda agregada sea el promedio,
máximo, minimo, etc., de las celdas constituyentes.
Figura 13. Secuencia de procesamiento en bloque.
En ArcMap(Spatial Analyst) la forma de aplicar estas funciones es a través de Map Calculator.
La sintaxis es casi la misma que las funciones focales. Por ejemplo:
BIockStats(INGRID,Operación,Tipo de vecindario, Celdas Sin Valor)
Las mismas explicaciones de los objetos de las funciones focales se aplican aquí.
Funciones zonales
Operaciones zonales son aquellas que se aplican dentro de un límite predefinido. Operaciones
14
zonales pueden incluir el resumir las condiciones dentro de una unidad administrativa, como por
ejemplo el porcentaje de tierra agrícola dentro de una provincia. Las operaciones zonales estadísticas
incluyen: máximo, mínimo, suma, rango, promedio, media, mayoría etc.
Las funciones estadísticas pueden arrojar tablas, histogramas u otros rasters. Mediante el uso
de SUMMARIZE ZONES en el menú ANALYSIS se pueden efectuar tablas de resumen con las
distintas estadísticas y efectuar histogramas de frecuencias por zonas, Para crear un nuevo raster
con las funciones zonales es necesario escribir comandos en lenguaje macro en Map Calculator.
La sintaxis general de este tipo de funciones en Map Calculator es:
ZonalStats (INGRID,Operación, Zona del objeto, Proyección de la zona, Campo de análisis,
Celdas sin valor)
En donde:
INGRID = es el raster a analizarse
Operación = es cualquier tipo de operación a efectuarse en el raster (igual que las anteriores)
Zona del objeto = es el raster que se usará para hacer las evaluaciones por zonas
Proyección de la zona = la proyección de la zona (ver HELP de ArcMap), si es la misma
proyección en la que se encuentra el RASTER de análisis entonces se escribe Prj.MakeNull
Campo de análisis = Es la columna de atributos para la cual se efectuaran las estadísticas
zonales.
Funciones globales
Son aquellas que se aplican a todo el set de datos o raster. Evaluaciones de operaciones
globales incluyen tanto simples distancias Euclideanas como mediciones de costo distancia. En
general, las funciones globales pueden dividirse en:
•
Funciones globales de distancia Euclideana
Funciones de distancia Eudideana están diseñadas para calcular mediciones de distancia desde
un celda origen o un grupo de celdas. Calcula tanto la distancia (EucDistance) como la
dirección (EucDirection) y la colocación (EucAllocatioin) desde el origen (de una celda o de
un grupo de celdas) a sus vecinos más cercanos.
•
Funciones globales de distancia ponderada
Funciones de distancia pesada están basadas en el concepto de costo-distancia acumulado de
viaje desde cada celda a un cierto origen. Para efectuar estas operaciones se necesitan dos
tipos de superficies: un origen o punto de partida y un raster que represente el costo de
moverse por los distintos tipos de superficie. Este costo puede estar dado en tiempo o en
dinero.
Otra importante función de distancia pesada es la denominada LEAST-COST PATH o camino
menos costoso que indica cual es la vía menos costosa en tiempo o dinero de viajar de un sitio A a
un sitio B.
•
Funciones globales de superficie
Dentro de estas funciones se encuentran sombra de colina (hillshade), campo de visión
(viewshed), etc. Estas funciones se encuentran en el menú ANALYSIS.
Dentro de los usos más comunes de estas funciones también está la predicción de
valores en base a puntos con valores conocidos. Dentro de estas funciones están los métodos
de interpolación de distancia inversa pesada, kriging, spline y superficies de tendencia, entre
otros. La distancia inversa pesada examina la distancia linear entre dos puntos de muestreo y
pesa el valor de interpolación con el inverso de su distancia. La idea es que los valores más
cercanos tienden a estar espacialmente autocorrelacionados y deberían mostrar valores
15
similares que aquellos que están más lejos. Es un método determinístico que no provee una
manera de medir la incertidumbre de la interpolación.
Kriging está basado en la teoría de la variable regionalizada, que asume que la
variabilidad espacial de los valores estadísticos en una superficie son estadísticamente
homogéneos. Cada método de kriging usa funciones matemáticas que modelan las variaciones
espaciales en el valor Z dentro de una muestra de puntos. Un semivariograma es usado para
almacenar y evaluar la relación entre distancia entre puntos y la variación de los valores en Z.
Hay muchas formas de kriging y pueden ser agrupadas en métodos esféricos, circulares,
exponenciales, gausianos, y lineares. Si hay una suposición que la variación espacial en los
datos de superficie contiene alguna tendencia loca, un conjunto de métodos llamados Kriging
Universales es recomendado.
En los métodos de tendencia de superficie se usan regresiones polinómicas para calzar
una superficie de mínimos cuadrados en los puntos de muestreo. El propósito es mostrar
cambios generales en Z más no de predecir valores actuales de lugar en lugar. Una ecuación
polinómica de 1er orden se usaría para una zona relativamente plana. Ordenes mayores a 2do
grado para zonas más irregulares.
•
Funciones globales hidrológicas
Dentro de estas operaciones se encuentran las operaciones hidrológicas como por ejemplo:
flow accumulatíon, flow direction, watershed. Estas funciones pueden aplicarse usando Map
Calculator con la siguiente sintaxis:
Referencias Bibliográficas
Burt, P.J. 1980. Tree and pyramid structures for coding Hexagonally sampled binary images.
Computer Graphics and Image Processing, 14:271-280.
DeMers, M.N. 2002. GIS Modeling ¡n Raster. John Wiley & Sons, New York.
Lee, J., and D. W. S. Wong, (2001), Staistical Analysis with ArcMap GIS, John Wiley & Sons, New
York.
Males, R.M. 1977. ADAPT_A Spatial Data Strucutre for Use with Planning and Design Models.
Working Papers from the Advanced Study Symposium on Topological Data Structures for GIS.
2:1-35.
Peucker, T. K. and N. Chrisman, 1975. Cartographic Data Structures. The American Cartographer,
2:55-69.
Star, J., and Estes, J. 1990. Geographic Information Systems, An ¡ntroduction. Englewood Cliffs,
Prentince Hall, New Jersey.
Tomlin, C. D. 1990. Geographic Information Systems and Cartographic Modeímg. Englewood Cliffs,
Prentice Hall, New Jersey.
Tobler, W.R. 1979. Cellular Geography. In S. Gale and G. Olsson, eds. Philosophy of Geography.
Dordrecht, Holland: D. Riedel Publishing Company, pp. 379-386.
Tobler, W.R. 1970. A computer model simulating urban growht ¡n the Detroit región. Economic
Geography 46 (2): 234-240.
Referencias ON-LINE
http://www.laser-scan.com/papers/ooforgis.htm Peter Woodsford. 2003. Laser-Scan Limited, Science
Park, Milton Road, Cambridge, CB4 OFY, UK
http://geog55.geoq.uiuc.edu/se/pdf/spauto.pdf Lúe Anselin. 2002. Spatial Autocorrelation.
http://dept.kent.edu/geoqraphv/sheridan/geog39002/39002-Q4.htm Scott Sheridan, 2003, Statistical
Methods in Geography, Kent State University
http://sal.agecon.uiuc.edu/courses/sa/pdf/w2_gis_sa.pdf Lúe Anselin. 2002. GIS and Spatial Analysis,
Universtiy of Illinois.
16
Libros recomendados
DeMers, M.N. 2002. GIS Modeüng in Raster. John Wiley & Sons, New York.
Fotheringham, A.S, Brunsdon C, Charlton, M. 2000. Quantitative GeographyPerspectives on Spatial
Data Analysis. SAGE, London.
Lee, J., and D. W. S. Wong. 2001. Staistical Analysis with ArcMap GIS. John Wiley & Sons, New
York.
Longley, P.A., Goodchild, M.F., Maguire, D.J., and Rhind, D.W. 2001. Geographic Information
Systems and Science. John Wiley & Sons, New York.